
Low Pressure Experimental Validation of Low-Dimensional Analytical Model for Air–Water Two-Phase Transient Flow in Horizontal Pipelines

 ,
,
Abstract
:
1. Introduction
2. Reduced-Order Dynamic Transient Multiphase Flow Model
2.1. Low-Dimensional Transient Multiphase Flow Model
2.2. OLGA Multiphase Flow Model
2.3. Steady-State Multiphase Flow Models Comparison
3. Dynamic Multiphase Flow Model Evaluation
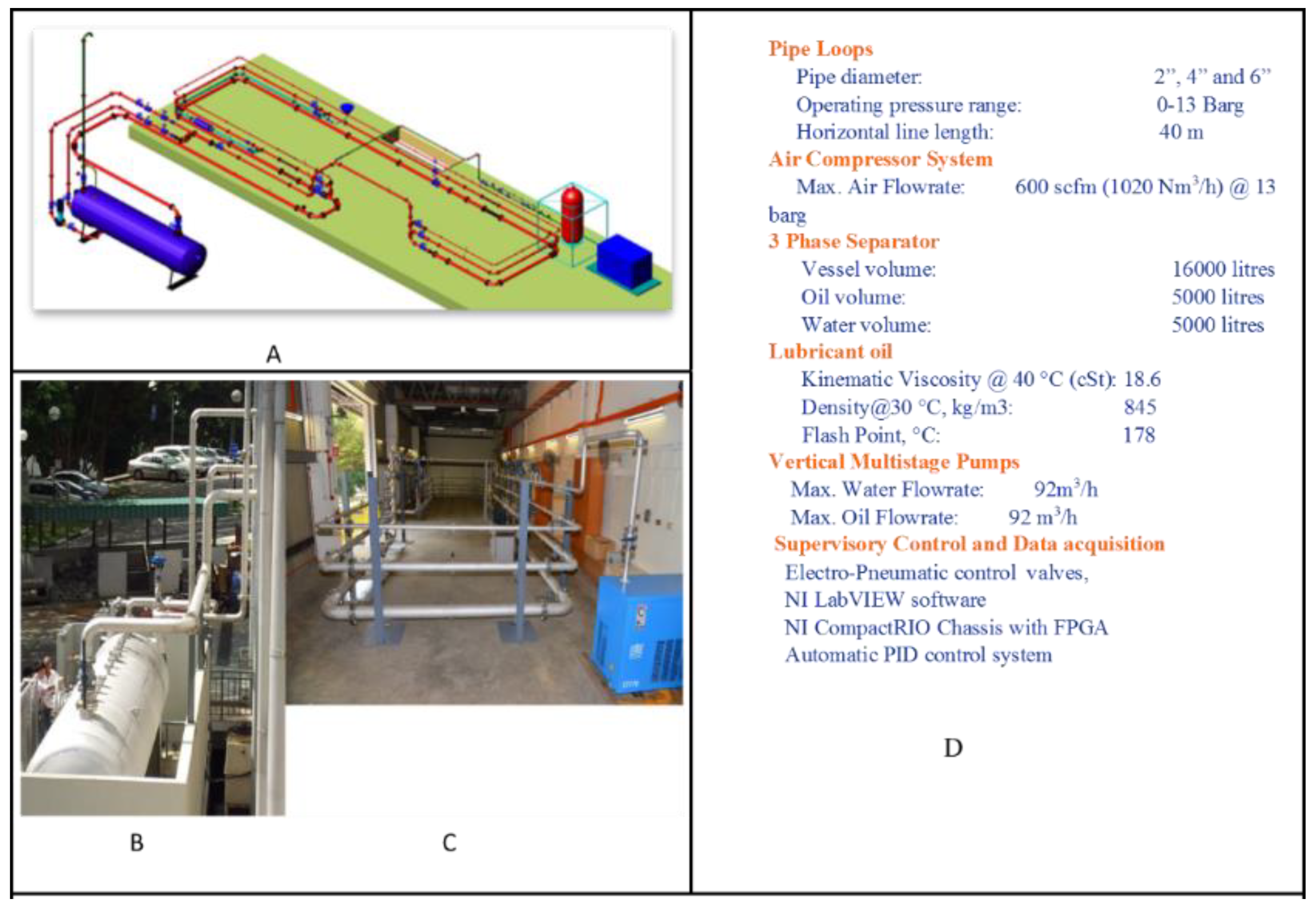
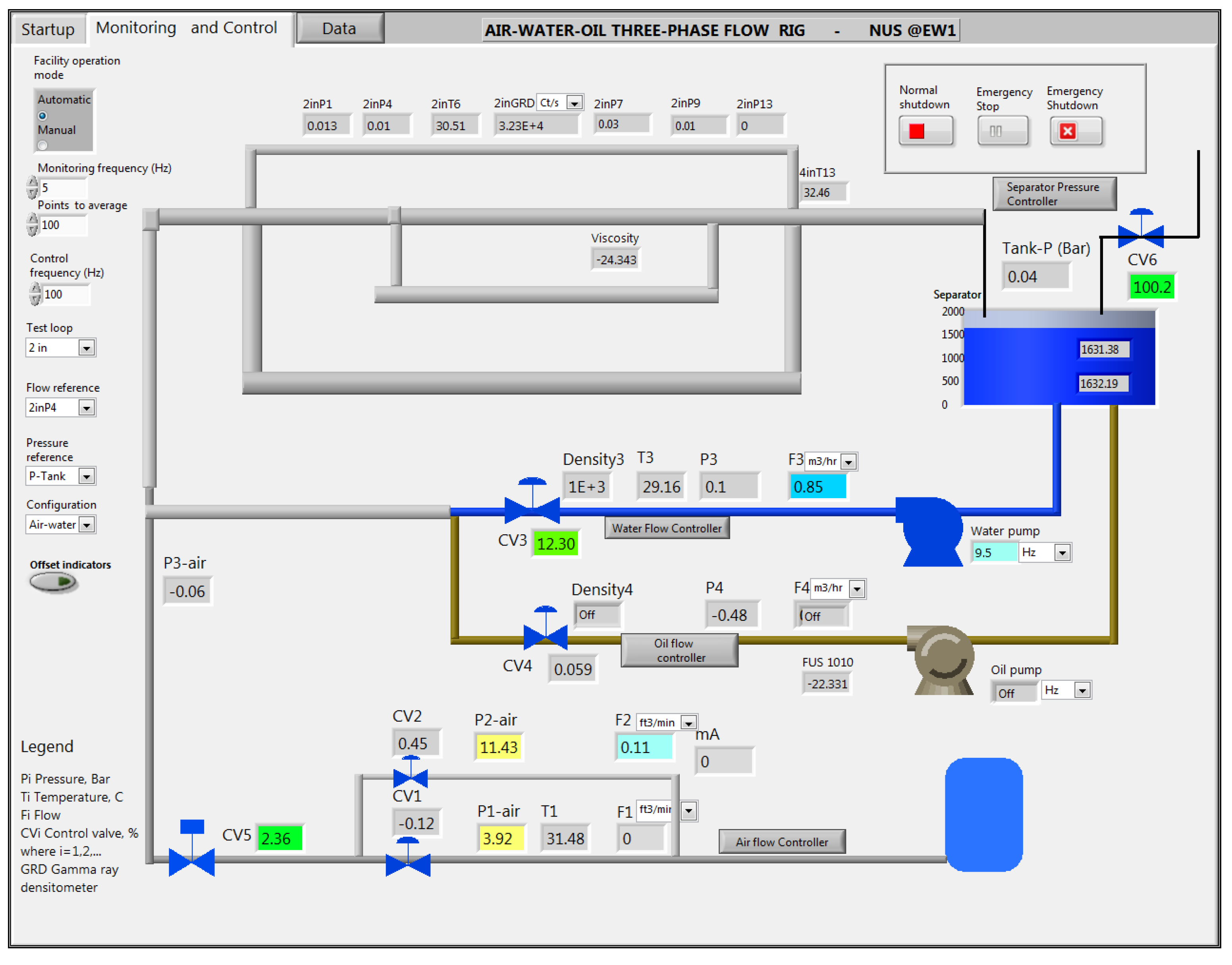
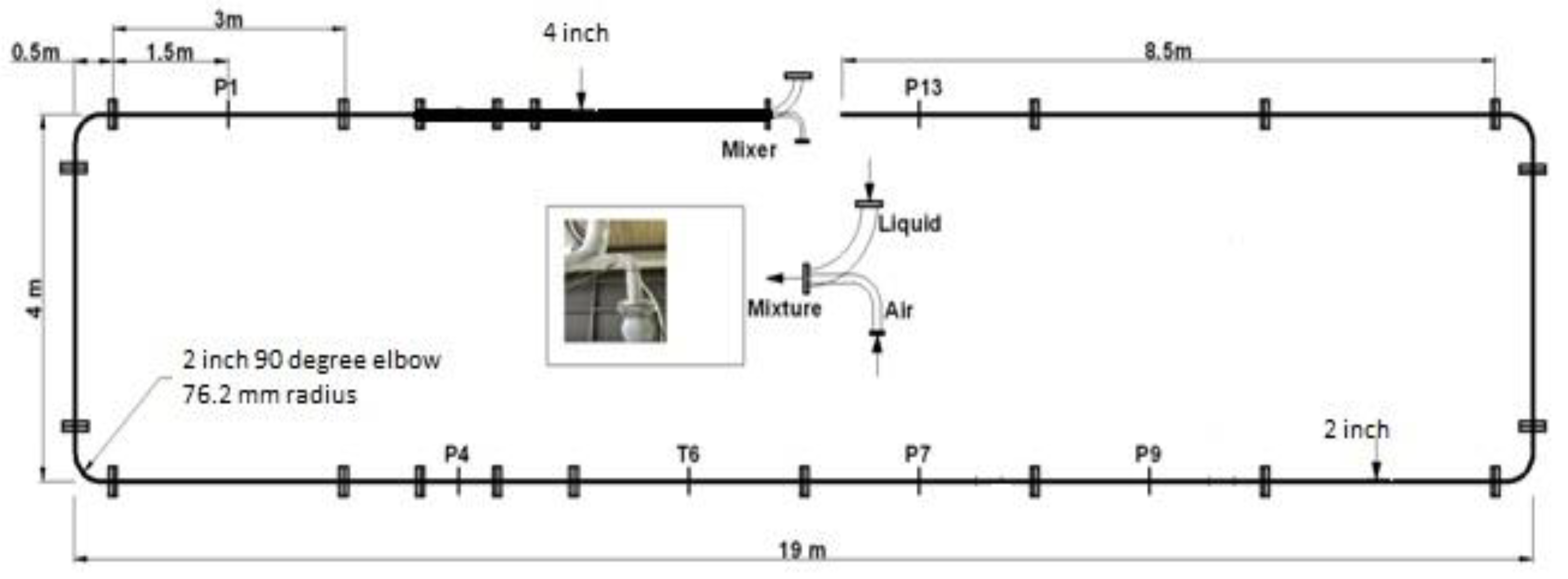
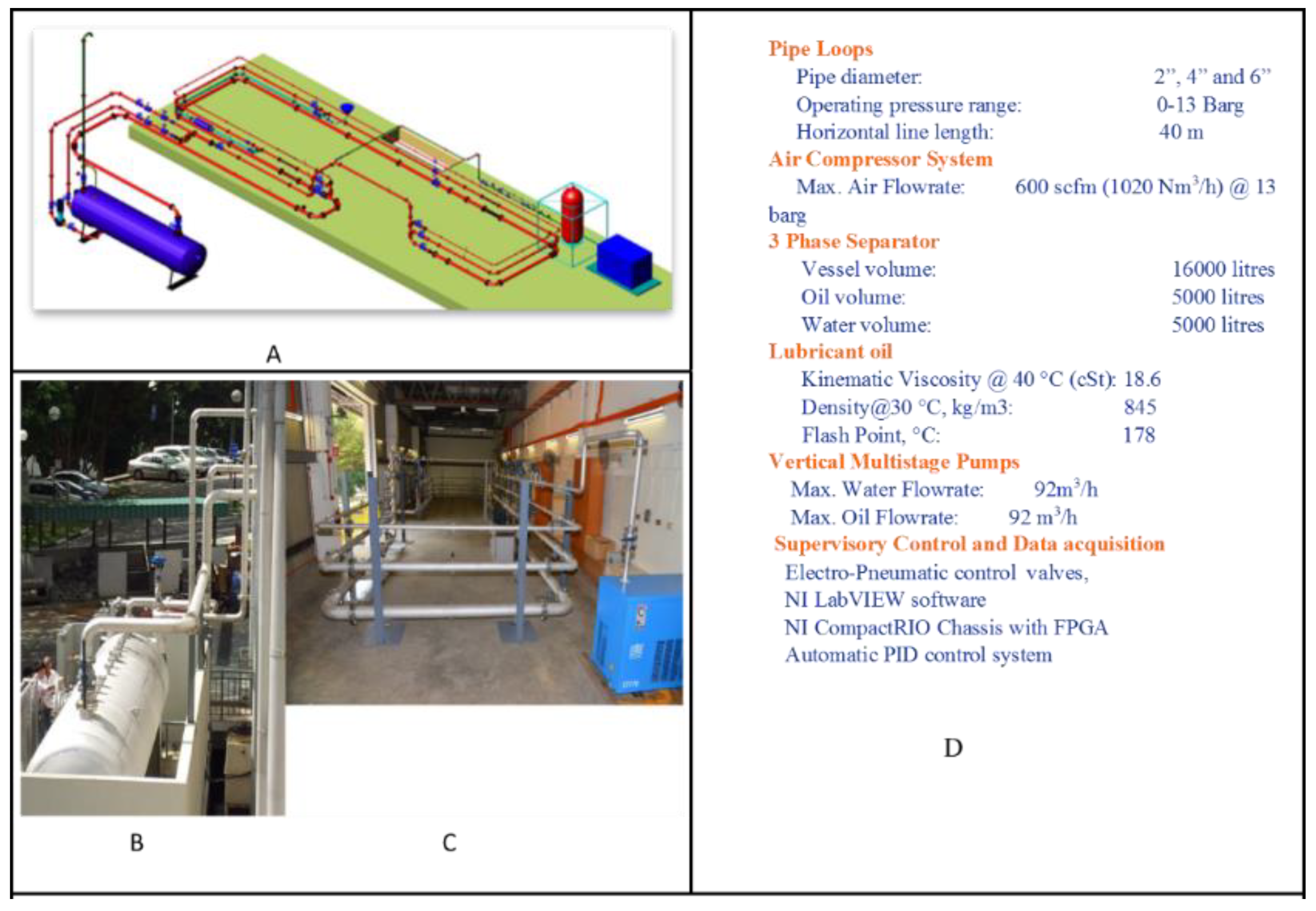
3.1. National University of Singapore (NUS) Experimental Facility, Instrumentation and Data Acquisition
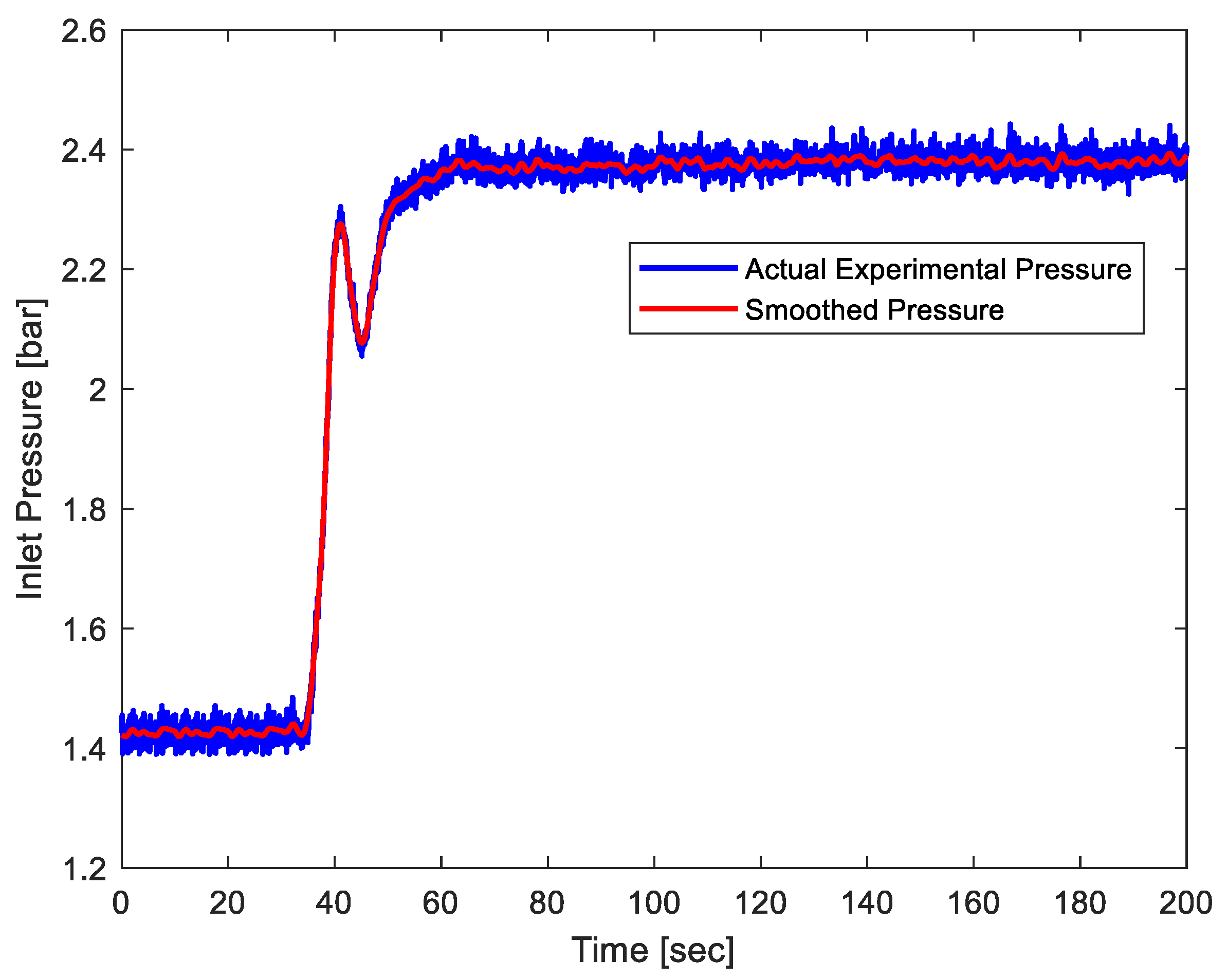
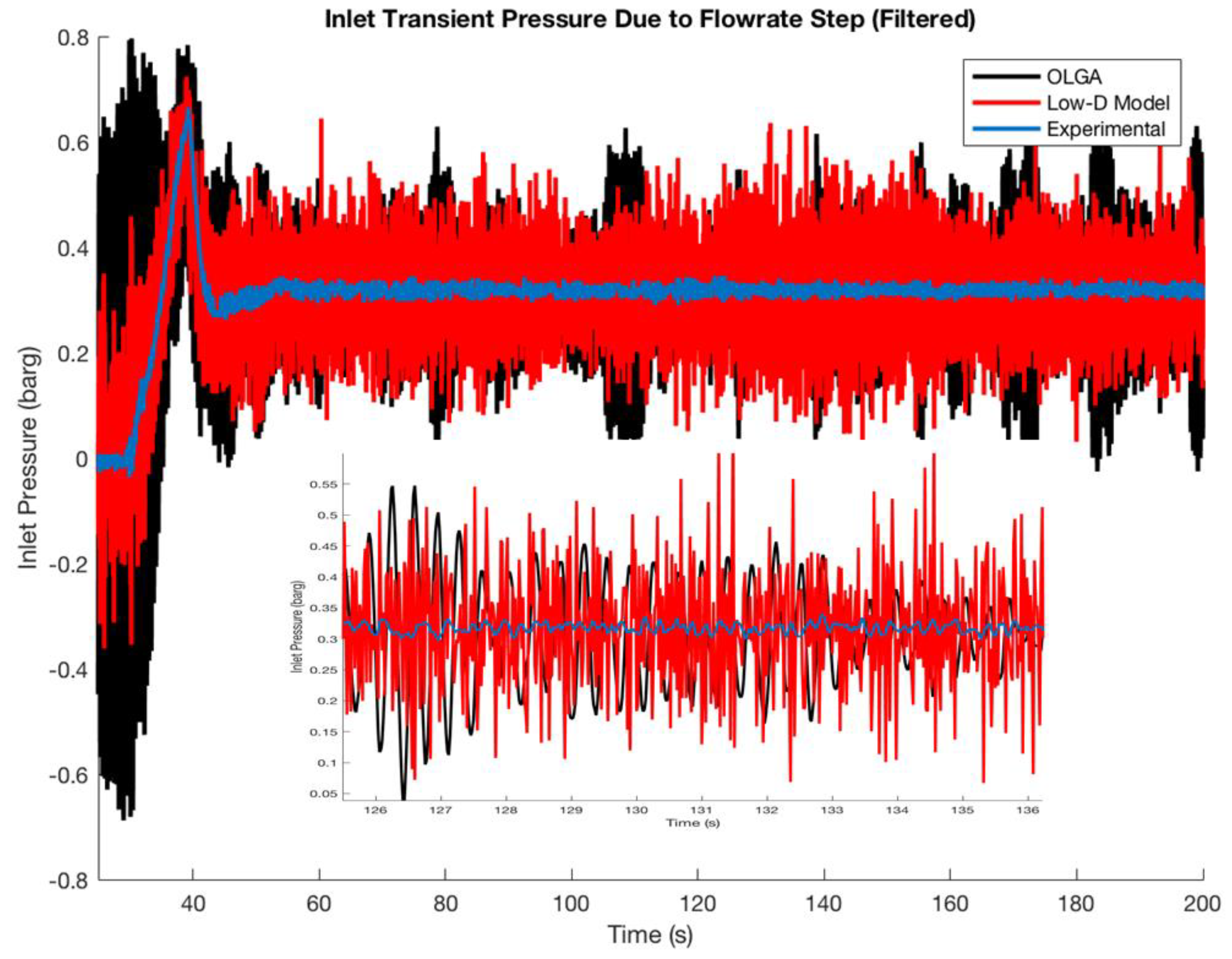
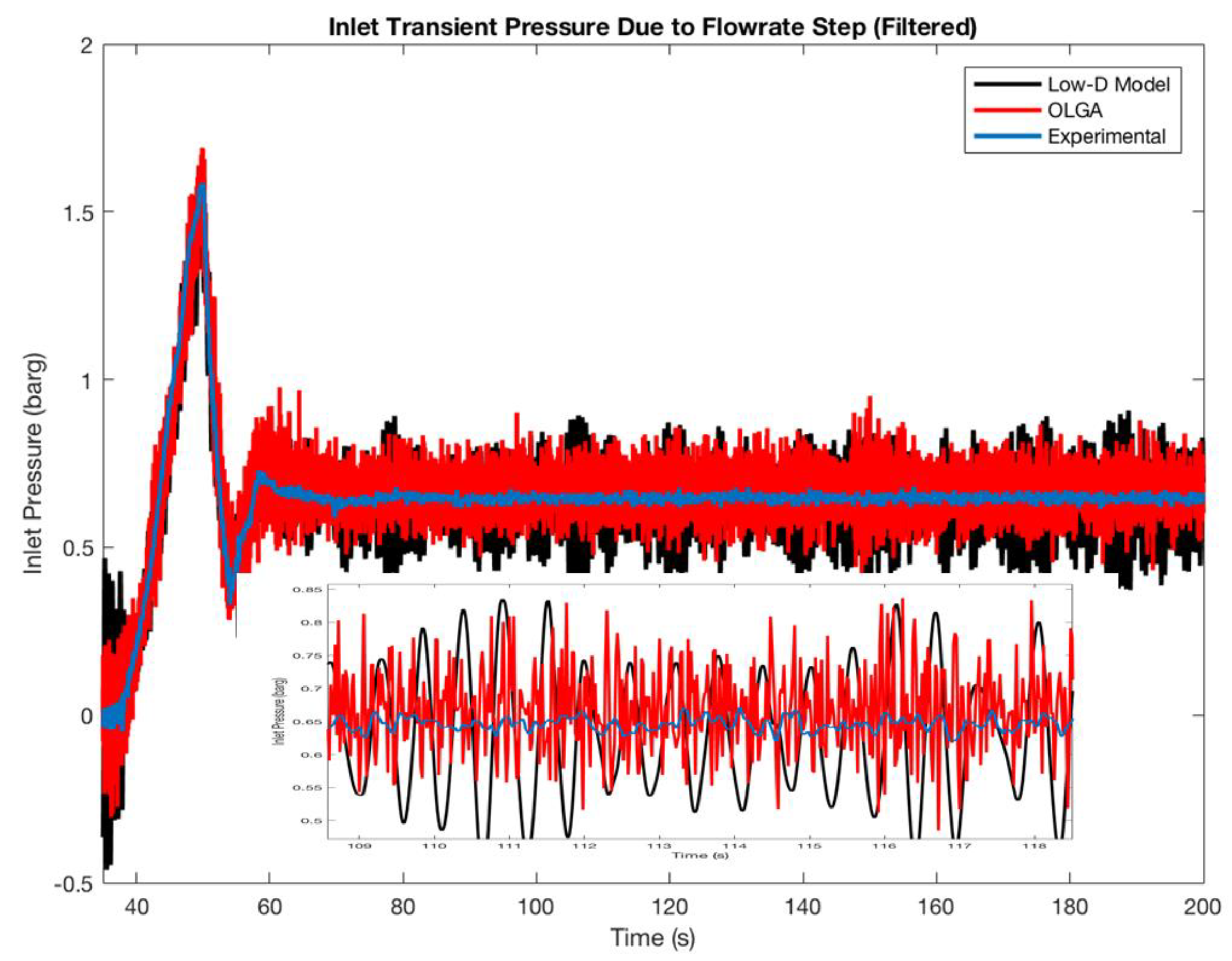
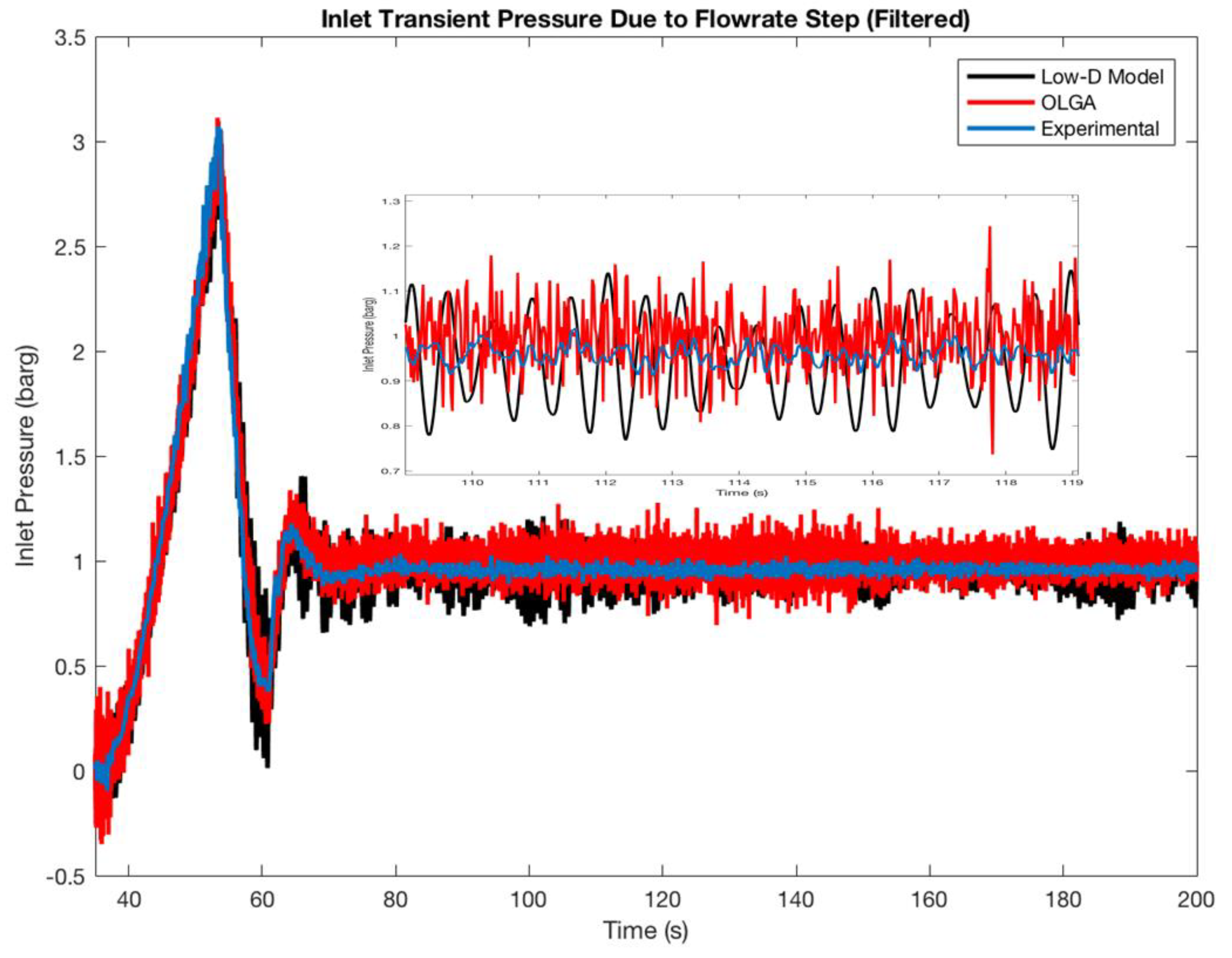
3.2. Dynamic Multiphase Flow Transient Response Evaluation
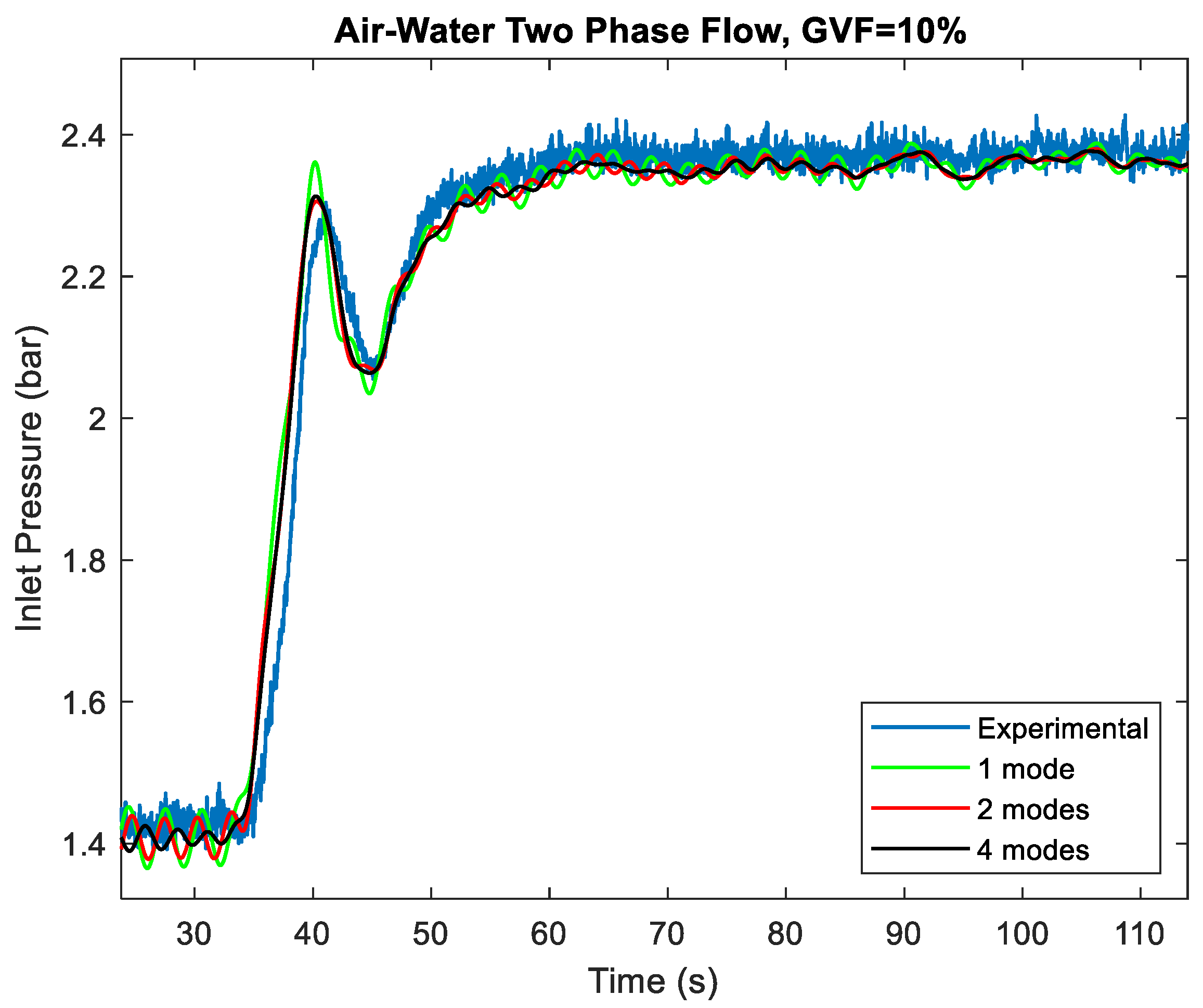
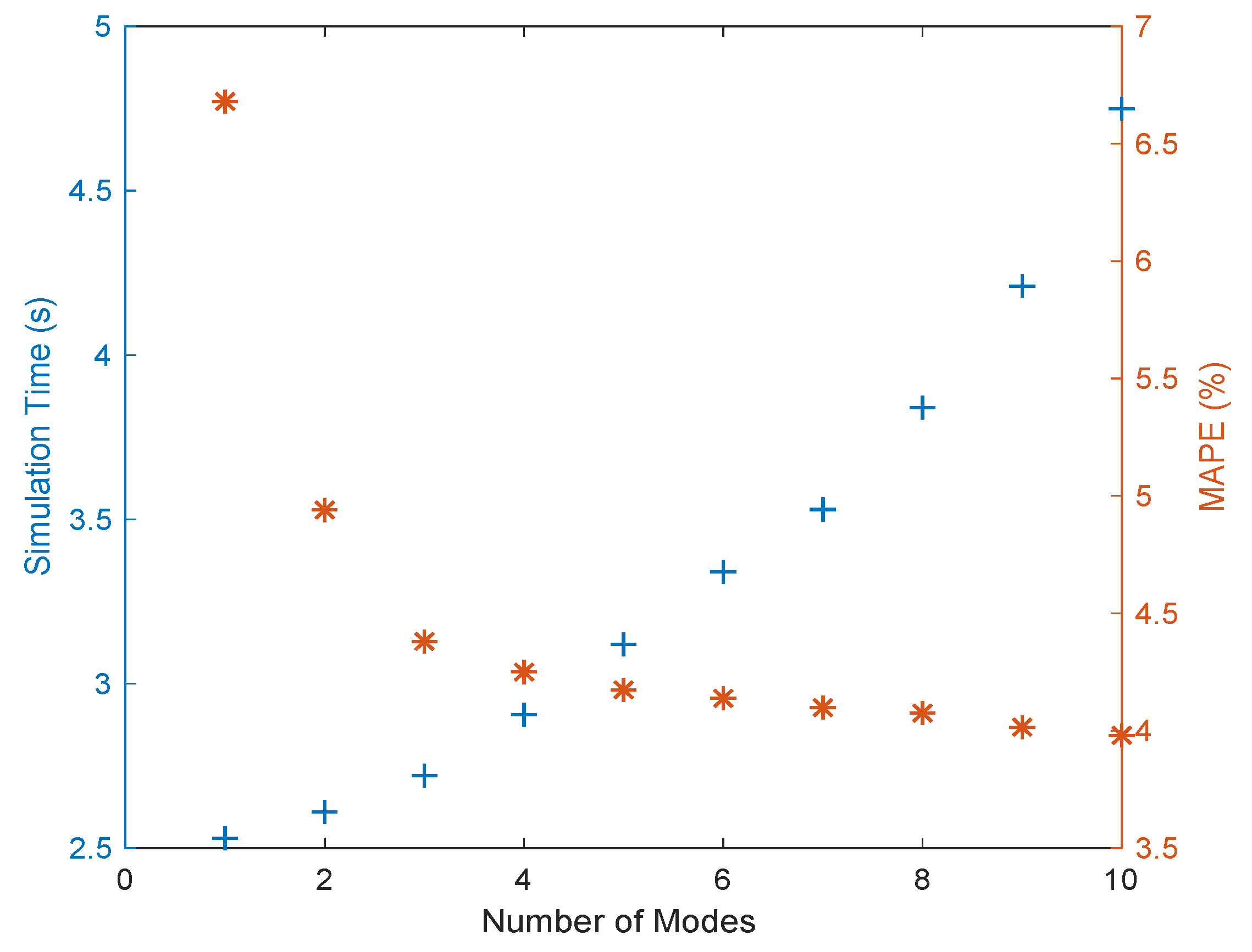
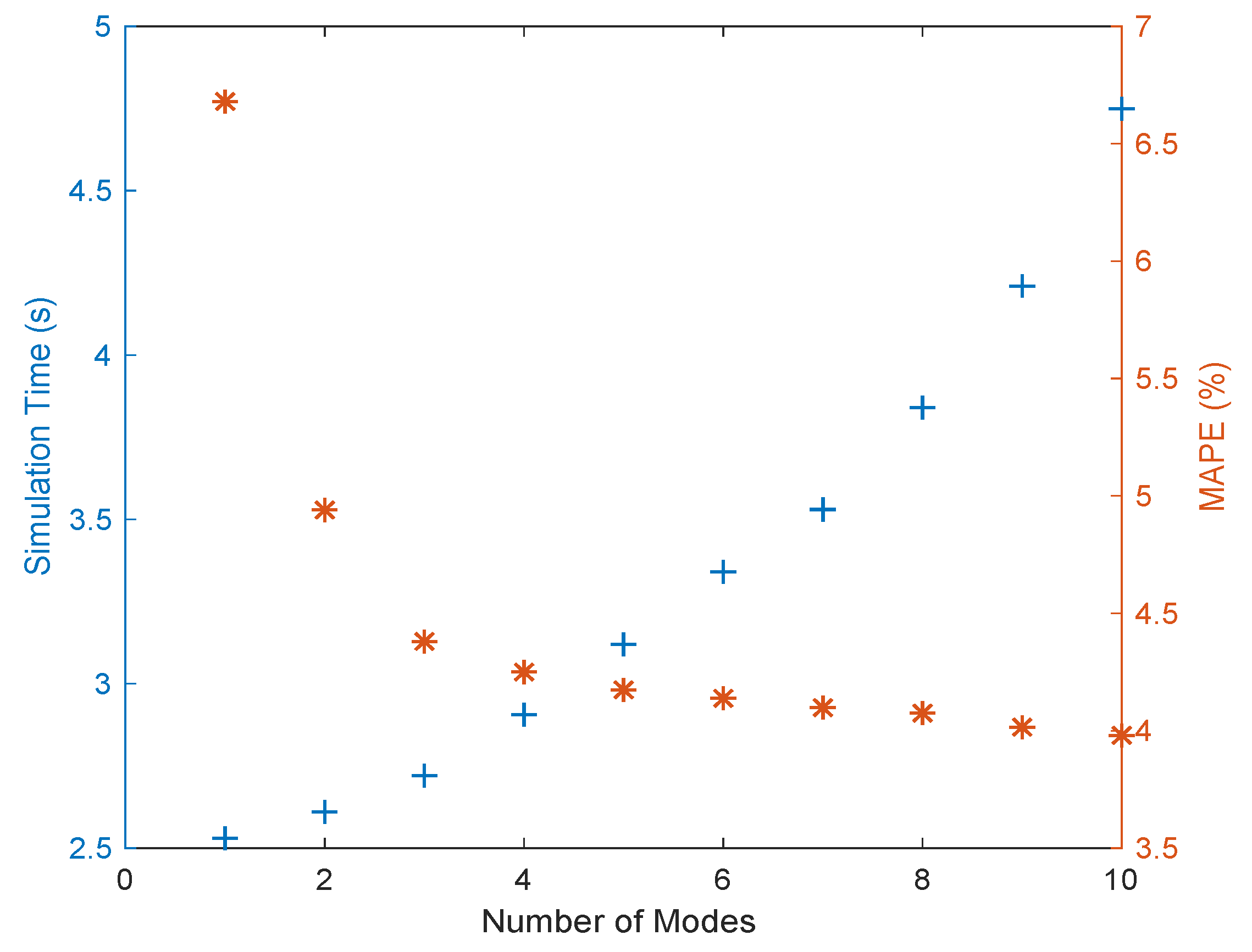
3.2.1. Effect of the Number of Modes on the Low-D Model Accuracy
3.2.2. Effect of Entrained Air on the Pipeline Dynamic Response
3.2.3. Effect of Gas Volume Fraction (GVF) on the Pipeline Dynamic Response
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Pedersen, S.; Durdevic, P.; Yang, Z. Review of slug detection, modeling and control techniques for offshore oil & gas production processes. IFAC Pap. 2015, 48, 89–96. [Google Scholar]
- Maria, S.; Iyalla, I.; Okulaja, O. Investigating Flow Regimes in High Temperature High Pressure HPHT Gas Subsea Tieback. In Proceedings of the SPE Nigeria Annual International Conference and Exhibition, Online, 11–13 August 2020. [Google Scholar]
- Beggs, D.H.; Brill, J.P. A study of two-phase flow in inclined pipes. J. Pet. Technol. 1973, 25, 607–617. [Google Scholar] [CrossRef]
- Hagedorn, A.R.; Brown, K.E. Experimental study of pressure gradients occurring during continuous two-phase flow in small-diameter vertical conduits. J. Pet. Technol. 1965, 17, 475–484. [Google Scholar] [CrossRef]
- Taitel, Y.; Dukler, A.E. A model for predicting flow regime transitions in horizontal and near horizontal gas-liquid flow. Aiche J. 1976, 22, 47–55. [Google Scholar] [CrossRef]
- Barnea, D. A unified model for predicting flow-pattern transitions for the whole range of pipe inclinations. Int. J. Multiph. Flow 1987, 13, 1–12. [Google Scholar] [CrossRef]
- Xiao, J.; Shonham, O.; Brill, J. A comprehensive mechanistic model for two-phase flow in pipelines. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, Louisiana, 23–26 September 1990. [Google Scholar]
- Ansari, A.; Sylvester, N.; Shoham, O.; Brill, J. A comprehensive mechanistic model for upward two-phase flow in wellbores. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, Louisiana, 23–26 September 1990. [Google Scholar]
- Petalas, N.; Aziz, K. A mechanistic model for multiphase flow in pipes. J. Can. Pet. Technol. 2000, 39. [Google Scholar] [CrossRef]
- Moore, K.; Rettig, W. RELAP4: A Computer Program for Transient Thermal-Hydraulic Analysis; Aerojet Nuclear Co.: Idaho Falls, ID, USA, 1973.
- Fisher, A.; Reid, D.; Tan, M.Z.; Galloway, G. Extending the Boundries of Casing Drilling. In Proceedings of the IADC/SPE Asia Pacific Drilling Technology Conference and Exhibition, Kuala Lumpur, Malaysia, 13–15 September 2004. [Google Scholar]
- Bendiksen, K.H.; Maines, D.; Moe, R.; Nuland, S. The dynamic two-fluid model OLGA: Theory and application. Spe Prod. Eng. 1991, 6, 171–180. [Google Scholar] [CrossRef]
- Danielson, T.J.; Bansal, K.M.; Hansen, R.; Leporcher, E. LEDA: The next multiphase flow performance simulator. In Proceedings of the 12th International Conference on Multiphase Production Technology, Barcelona, Spain, 25–27 May 2005. [Google Scholar]
- Meziou, A.; Chaari, M.; Franchek, M.; Borji, R.; Grigoriadis, K.; Tafreshi, R. Low-dimensional modeling of transient two-phase flow in pipelines. J. Dyn. Syst. Meas. Control 2016, 138, 101008. [Google Scholar] [CrossRef]
- Jayanti, S.; Hewitt, G. Prediction of the slug-to-churn flow transition in vertical two-phase flow. Int. J. Multiph. Flow 1992, 18, 847–860. [Google Scholar] [CrossRef]
- Falcone, G.; Teodoriu, C.; Reinicke, K.M.; Bello, O.O. Multiphase-flow modeling based on experimental testing: An overview of research facilities worldwide and the need for future developments. Spe Proj. Facil. Constr. 2008, 3, 1–10. [Google Scholar] [CrossRef]
- King, M.; Hale, C.; Lawrence, C.; Hewitt, G. Characteristics of flowrate transients in slug flow. Int. J. Multiph. Flow 1998, 24, 825–854. [Google Scholar] [CrossRef]
- Sutton, R.P.; Christiansen, R.L.; Skinner, T.K.; Wilson, B.L. Investigation of Gas Carryover With a Downward Liquid Flow. In Proceedings of the SPE Annual Technical Conference and Exhibition, San Antonio, TX, USA, 24–27 September 2006. [Google Scholar]
- NTNU. NTNU Multiphase Flow Loop. Available online: https://www.ntnu.edu/ept/laboratories/multiphase (accessed on 20 May 2021).
- Pedersen, S. Plant-Wide Anti-Slug Control for Offshore Oil and Gas Processes. Ph.D. Thesis, Aalborg University, Aalborg East, Denmark, 2016. [Google Scholar]
- NUS Multiphase Flow Loop. Available online: https://www.researchgate.net/lab/Wai-Lam-Loh-Lab-Multiphase-Flow-Loop-Wai-Lam-Loh (accessed on 20 July 2020).
- Petalas, N.; Aziz, K. Stanford Multiphase Flow Database—User’s Manual, Version 0.2; Petroleum Engineering Department, Stanford University: Stanford, CA, USA, 1995. [Google Scholar]
- Brown, F.T. The Transient Response of Fluid Lines. Asme. J. Basic Eng. 1962, 84, 547–553. [Google Scholar] [CrossRef]
- Franke, M.E.; Malanowski, A.J.; Martin, P. Effects of temperature, end-conditions, flow, and branching on the frequency response of pneumatic lines. ASME. J. Dyn. Sys. Meas. Control. 1972, 94, 15–20. [Google Scholar] [CrossRef]
- Johnston, D.N. Numerical modelling of unsteady turbulent flow in tubes, including the effects of roughness and large changes in Reynolds number. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2011, 225, 1874–1885. [Google Scholar] [CrossRef] [Green Version]
- Oldenburger, R.; Goodson, R. Simplification of hydraulic line dynamics by use of infinite products. ASME. J. Basic Eng. 1964, 86, 1–8. [Google Scholar] [CrossRef]
- Hsue, C.Y.; Hullender, D.A. Modal approximations for the fluid dynamics of hydraulic and pneumatic transmission lines. In Proceedings of the Fluid Transmission Line Dynamics 1983, Proceedings of the Winter Annual Meeting, Boston, MA, USA, 13–18 November 1983; American Society of Mechanical Engineers: New York, NY, USA, 1983; pp. 51–77. [Google Scholar]
- Bendiksen, K.; Brandt, I.; Fuchs, P.; Linga, H.; Malnes, D.; Moe, R. Two-phase flow research at SINTEF and IFE: Some experimental results and a demonstration of the dynamic two-phase flow simulator OLGA. In Proceedings of the Offshore Northern Seas Conference, Stavanger, Norway, 26 August 1986. [Google Scholar]
- Bendiksen, K.; Brandt, I.; Jacobsen, K.; Pauchon, C. Dynamic simulation of multiphase transportation systems. In Proceedings of the Multiphase Technology and Consequences for Field Development Forum, Stavanger, Norway, 26–27 October 1987. [Google Scholar]
- Loh, W.L.; Hernandez-Perez, V.; Tam, N.D.; Wan, T.T.; Yuqiao, Z.; Premanadhan, V.K. Experimental study of the effect of pressure and gas density on the transition from stratified to slug flow in a horizontal pipe. Int. J. Multiph. Flow 2016, 85, 196–208. [Google Scholar]
- Wylie, E.; Streeter, V.L. Fluid Transients; McGraw-Hill Co.: New York, NY, USA, 1978. [Google Scholar]
- Fox, J.A. Hydraulic Analysis of Unsteady Flow in Pipe; Macmillan International Higher Education: London, UK, 1977. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Flow Regime | Pressure Drop Gradient | Liquid Holdup | ||||
|---|---|---|---|---|---|---|
| Beggs and Brill | Petalas and Aziz | OLGA | Beggs and Brill | Petalas and Aziz | OLGA | |
| Bubble | 0.775 | 0.856 | 0 | 0.870 | 0.932 | 0.887 |
| Plug | 0.699 | 0.718 | 0 | 0.823 | 0.898 | 0.825 |
| Stratified | 0.656 | 0.920 | 0 | 0.766 | 0.847 | 0.781 |
| Froth | 0.766 | 0.899 | 0.323 | 0.560 | 0.947 | 0.857 |
| Slug | 0.610 | 0.857 | 0 | 0.793 | 0.921 | 0.892 |
| Annular Mist | 0.774 | 0.904 | 0.002 | 0.701 | 0.897 | 0.841 |
| Dispersed Bubble | 0.935 | 0.861 | 0.512 | 0.890 | 0.922 | 0.812 |
| Case Number | Initial Liquid Superficial Velocity (m/s) | Steady-State Liquid Superficial Velocity (m/s) |
|---|---|---|
| 1 | 0.1 | 2 |
| 2 | 0.1 | 3 |
| 3 | 0.1 | 4 |
| Case Number | GVF | Equivalent Bulk Modulus (Pa) | Equivalent Density (kg/m3) |
|---|---|---|---|
| 1 | 0.015 | 7.12 106 | 983.55 |
| 2 | 0.016 | 6.85 106 | 982.94 |
| 3 | 0.014 | 7.57 106 | 984.48 |
| GVF (%) | MAPE (%) | |
|---|---|---|
| Low-D Model | OLGA | |
| 10 | 1.96 | 2.82 |
| 20 | 3.43 | 4.25 |
| 30 | 2.91 | 3.41 |
| 40 | 2.60 | 3.01 |
| 50 | 3.32 | 3.82 |
| 60 | 2.12 | 1.60 |
| 70 | 1.87 | 1.91 |
| 80 | 1.72 | 1.79 |
| 90 | 1.63 | 1.65 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mnasri, H.; Meziou, A.; Franchek, M.A.; Loh, W.L.; Wan, T.T.; Tam, N.D.; Wassar, T.; Tang, Y.; Grigoriadis, K. Low Pressure Experimental Validation of Low-Dimensional Analytical Model for Air–Water Two-Phase Transient Flow in Horizontal Pipelines. Fluids 2021, 6, 220. https://doi.org/10.3390/fluids6060220
Mnasri H, Meziou A, Franchek MA, Loh WL, Wan TT, Tam ND, Wassar T, Tang Y, Grigoriadis K. Low Pressure Experimental Validation of Low-Dimensional Analytical Model for Air–Water Two-Phase Transient Flow in Horizontal Pipelines. Fluids. 2021; 6(6):220. https://doi.org/10.3390/fluids6060220
Chicago/Turabian StyleMnasri, Hamdi, Amine Meziou, Matthew A. Franchek, Wai Lam Loh, Thiam Teik Wan, Nguyen Dinh Tam, Taoufik Wassar, Yingjie Tang, and Karolos Grigoriadis. 2021. "Low Pressure Experimental Validation of Low-Dimensional Analytical Model for Air–Water Two-Phase Transient Flow in Horizontal Pipelines" Fluids 6, no. 6: 220. https://doi.org/10.3390/fluids6060220
APA StyleMnasri, H., Meziou, A., Franchek, M. A., Loh, W. L., Wan, T. T., Tam, N. D., Wassar, T., Tang, Y., & Grigoriadis, K. (2021). Low Pressure Experimental Validation of Low-Dimensional Analytical Model for Air–Water Two-Phase Transient Flow in Horizontal Pipelines. Fluids, 6(6), 220. https://doi.org/10.3390/fluids6060220