2. Analytical Approaches
As illustrated in
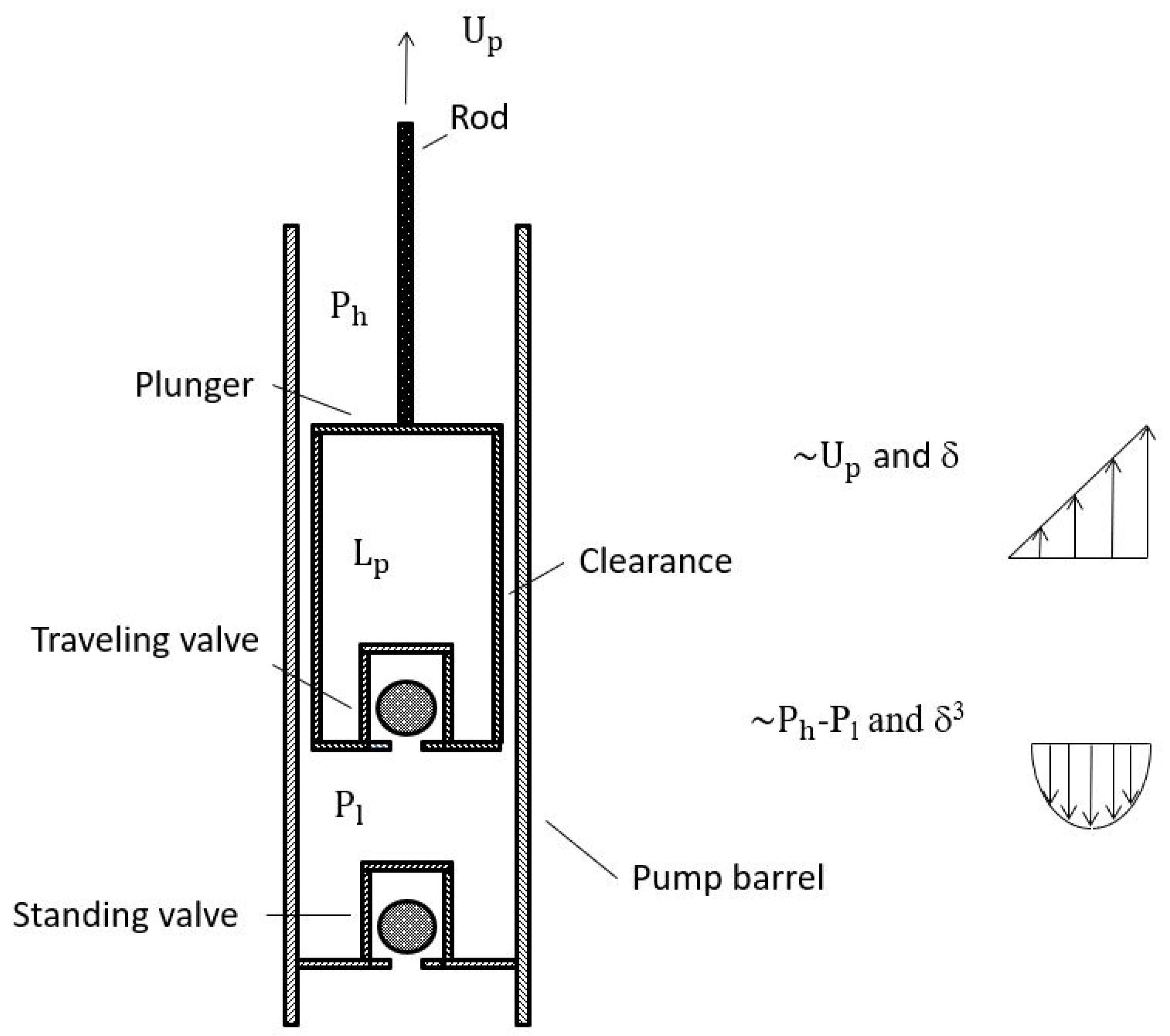
Figure 1, during the operation of the sucker rod pump systems, within the gap between the plunger outer surface and the barrel inner surface, two fundamental fluid flows exist, namely, a pressure difference driven Poiseuille flow and a boundary motion induced Couette flow. Both Poiseuille and Couette flows are idealized quasi-static laminar flows and could be governed by the following equations
where the plunger length is
, the fluid density is
, and the pressure gradient
is expressed as
.
Let’s assume the plunger velocity as
, namely,
. Furthermore, to be consistent with the leakage definition which is from the top to the bottom, the pressure difference
is positive when the upper region pressure
is higher than the lower region pressure
, moreover, the plunger velocity
is positive when it is moving downwards. Consider a plunger and a barrel pump system with an inner radius
which is a half of the outer diameter (OD) of the plunger and an outer radius
which is the half of the inner diameter (ID) of the barrel. The gap denoted as
or the clearance
C, which is equivalent to
is small in comparison with both
and
. According to the specific geometries of typical sucker rod pump systems and their operating conditions, we could first ignore the inertial and time dependent effects and denote the pressure difference
as
, the Navier-Stokes equation in the cylindrical coordinate system can be simplified as
where
and
represent the pressure on the top of the plunger and on the bottom of the plunger, or rather within the sucker rod pump, namely, between the traveling valve and the standing valve,
refers to the dynamic viscosity of the fluid.
From Equation (
2), we derive
where
and
can be decided based on the boundary conditions.
In order for us to understand the selection of these two constants
and
, let’s continue with this steady linear partial differential Equation (
3). For Newtonian viscous fluid, with the linear superposition principle, we can solve the Couette flow and the Poiseuille flow separately. For the Poiseuille flow, on the inner surface of the pump barrel and the outer surface of the plunger, we have the kinematic conditions
and
. The velocity profile within the annulus region expressed as Equation (
3) has
For small clearance, with the Taylor’s expansion, we derive
hence, the solution of Equation (
3) can be expressed as
Moreover, we can easily establish the flow rate through the annulus region as
Within
, the flow rate due to the pressure difference, namely Poiseuille flow,
is established as
with the perturbation ratio
.
Consequently, the viscous shear force acting on the plunger outer surface in the direction from the top to the bottom can be calculated as
Likewise, for the Couette flow, with the moving outer surface of the plunger, together with the sucker rod, since the barrel is stationary, thus, for Newtonian viscous fluid, the fluid velocity at the barrel inner surface is zero. Hence, we have the kinematic boundary conditions
and
, and the flow field can be expressed as
with
Using the Taylor’s expansion, we have the simplified expression for the flow field,
Notice that the gradient of the velocity profile at the plunger surface matches with the approximation with respect to the thin gap. Moreover, the flow rate due to the shear flow, namely, Couette flow,
can still be written as
yet the flow direction is the same as the plunger velocity
, namely, from the bottom to the top when the upper region pressure
is higher than the lower region pressure
.
Again, using the Taylor’s expansions in Equation (
5), we have
As a consequence, the viscous shear force acting on the plunger surface in the direction from the top to the bottom can be calculated as
It is clear that the leading term of the shear force
is consistent with the Newtonian fluid assumption with the dynamic viscosity
. Finally, by combining the Couette and Poiseuille flows, we can have the steady state solution for the velocity profile
expressed as
where the Taylor’s expansion in Equation (
5) is employed for the coefficients in Equations (
4) and (
10) with
.
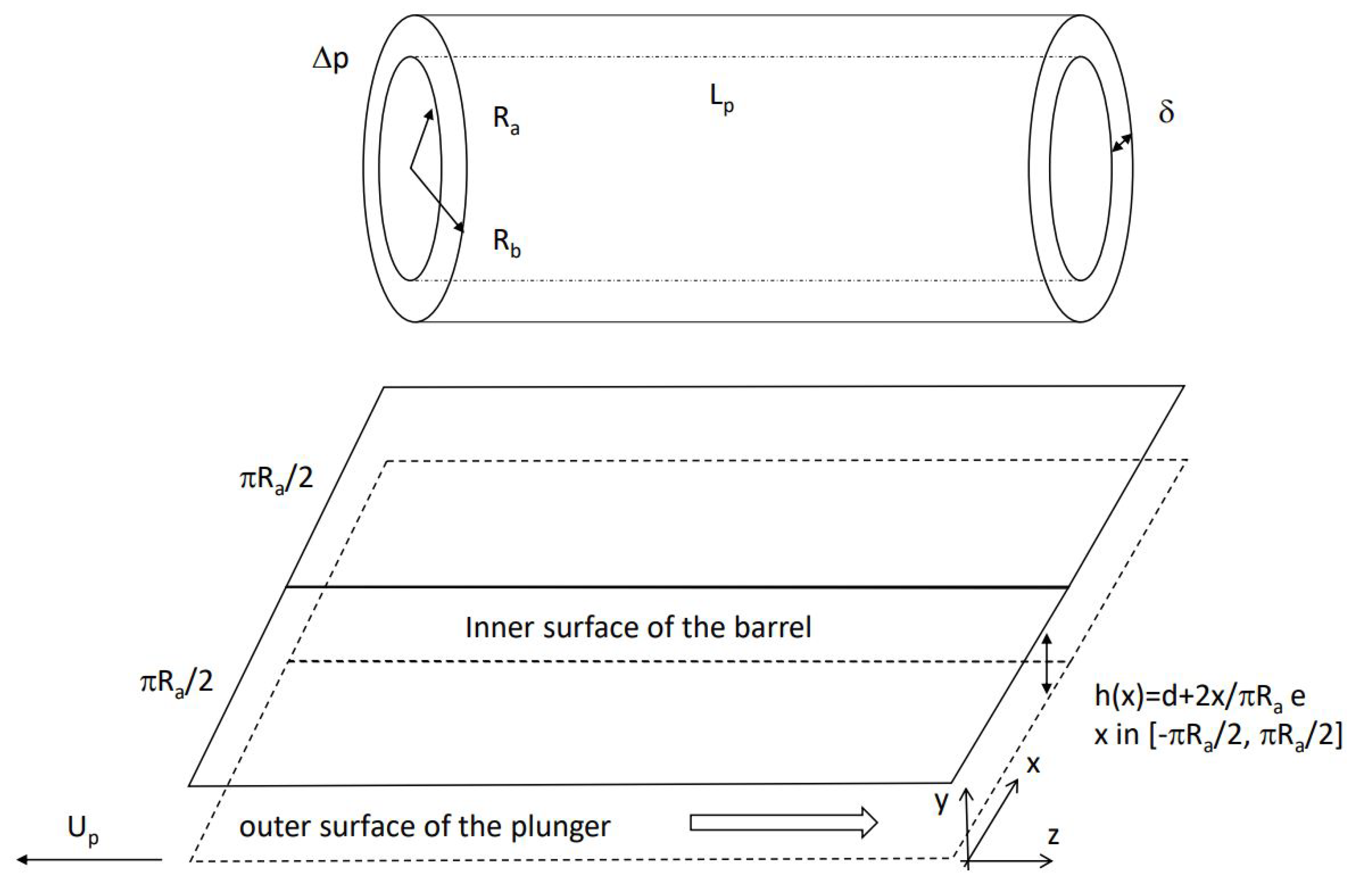
It is the cylindrical coordinate system that renders this seemingly simple problem complicated. If however, we utilize the scaling based on the physics and mathematics, for the large aspect ratio between the plunger length
and the gap size of the annulus region
as well as between the plunder radius
and the gap size, we can cut open the annulus region and simplify the flow domain as a rectangular box as shown in
Figure 2 with an axial length
(
z direction), a width
(
x direction), and a height
h (
y direction) [
23,
24]. Notice here that even with the eccentricity which is marked with the difference
between the widest gap and the narrowest gap, or rather
e, the distance between the center of the outer surface of the plunger and the center of the inner surface of the barrel, there exists a mid symmetrical axis at
and the flow regions with
and
are identical. Once we recognize the symmetry, we only need to consider one half of the annulus region with eccentricity and the half of the perimeter is denoted with
, as depicted in
Figure 2. Of course, for the concentric sucker rod pump, we have a uniform gap with
. However, with eccentricities, such a height will be a function of
x which will be discussed separately in
Section 3.
For narrow annulus regions, the governing Equation (
1) for the Poiseuille and Couette flows can be simplified as
where
w is the velocity component in the axial or
z direction and the pressure gradient in
z direction is still constant.
Again, for the Poiseuille flow, on the inner surface of the pump barrel at
and the outer surface of the plunger at
, we have the kinematic conditions
and
. Hence, the velocity profile within the annulus or rather simplified rectangular region can be expressed as
Furthermore, we can easily establish the flow rate
through the concentric annulus region with
as
. The flow rate due to the pressure difference
is established as
with
.
It is not difficult to confirm that the leading term in Equation (
7) matches with the simplified expression in (
17). Consequently, the viscous shear force acting on the plunger outer surface in the direction from the top to the bottom can be calculated as
It is again confirmed that the leading term in Equation (
8) matches with the simplified expression in (
18). Note that the viscous shear force acting on the plunger outer surface in the direction from the top to the bottom. Moreover, due to the small gap size, it is reasonable to assume the shear force acting on the outer surface of the plunger is the same as that of the inner surface of the barrel [
23,
24]. Thus, these two surface shear forces will balance the total normal force due to the pressure difference over the plunger length, namely,
where
stands for the viscous shear force acting on the plunger outer surface due to Poiseuille flow.
It is clear that Equation (
19) is consistent with Equation (
18) and the leading term in Equation (
8). In fact, in engineering practice, the dominant term is often sufficient. It is obvious that with the help of the physics and mathematics insights [
25,
26], the simplified rectangular domain is much easier to handle than the annulus region and this advantage will be more crucial when we discuss the relaxation time and the case with eccentricities in
Section 3.
Similarly, for the Couette flow, on the inner surface of the pump barrel at
and the outer surface of the plunger at
, we have the kinematic conditions
and
. Hence, the velocity profile within the annulus or rather simplified rectangular region can be expressed as
Furthermore, we can easily establish the flow rate
through the concentric annulus region with
as
The flow rate due to the shear motion at
(outer surface of the plunger) is established as
which matches with the leading term in Equation (
12).
Consequently, the viscous shear force acting on the plunger outer surface in the direction from the top to the bottom can be calculated as
where
is the viscous shear force acting on the plunger outer surface due to Couette flow.
In comparison with Equation (
13), it is again confirmed that the leading term matches with the simplified expression in (
22). Furthermore, in order for us to derive Equation (
23) from a full-fledged Navier-Stokes equations, we must identify whether or not the fluid flow is in the turbulent region as well as the transient effects [
27,
28]. First of all, within the gap which is measured in mills, for typical oils, the kinematic viscosity
at 100 °C is around 5.3 cSt or
, about five times that of the water and the plunger velocity
is no more than 40 in/s, thus the so-called Reynolds number
is much smaller than 100 let alone the turbulent flow threshold around 2000. Although the Reynolds number is a clear indication about the quasi-static nature of the Couette and Poiseuille flows within the narrow annulus region, in order to have some guidance with respect to the selection of the sampling time in the experimental measurements of the pressure and the displacement within the sucker rod pump unit, we must investigate further the inertia effects and other time dependent issues. Consider the overall governing equation for the viscous flow within the annulus region
as expressed as
where the plunger length is
and the pressure gradient
is expressed as
.
Note that the pressure difference
is positive when the upper region (top) pressure is higher than the lower region (bottom) pressure which is consistent with the leakage definition. Assuming the plunger velocity is
, namely,
, by combining the Couette and Poiseuille flows, we can have the steady state solution for the velocity profile
expressed in Equation (
14).
The final unsteady velocity profile
can be written as
where the governing equation for the transient part
is expressed as
with the boundary conditions
and
.
Using the separation of variable method and common special functions [
29], we introduce
. As a consequence, we have
and the following governing equations
where
is the kinematic viscosity and the time scale
is also called the relaxation time.
For an exponentially decreasing function expressed as
, the tangent line at the origin always provides an horizontal intercept
and in general within 5 and 6 times the relaxation time
, the function is considered as sufficiently close to the steady solutions. From Equations (
26) and (27), we have
along with the characteristic expression
It is clear that the characteristic solution expressed in Equation (
28) is based on the combination of the first and the second kind of Bessel function satisfying Equation (27) and the characteristic time
defined as the relaxation time in Equation (
26) can be determined by the boundary conditions of
, namely
. Therefore, in order for Equations (
26) and (27) to have nontrivial solutions, we must have nontrivial or nonzero solutions of
and
, for the following linear system of equations,
It is clear that we must have the determinant of the coefficient matrix
in Equation (
29) equals to zero, namely
Finally, combining the steady and the transient solutions, the complete velocity profile can be expressed as
where the special function can be expressed as
and the coefficient
is calculated as
In order to separate the effects of the pressure difference and the plunger motion and getting ready for quasi-static or unsteady integrations, Equation (
14) is rewritten as follows.
where we have
As a consequence, the velocity profile can be expressed as
where the coefficient
is calculated as
It is known that for viscous fluid to squeeze through a narrow annulus channel, the required pressure gradient or pressure drop given a fixed channel length will be proportional to the gap to the power of three, namely, . The derivation based on Poiseuille flow does confirm such a notion. Moreover, the leakage issue is mostly prominent during the upward stroke, namely, the sucking process. In the upward stroke, the plunger is moving up and as a result will drag fluid up instead of down, which is opposite to the leakage. This effect is due to so-called Couette flow which will introduce a flow rate in a different direction of the power of one, namely, . Note that in the Couette flow, we focus only on the shear flow introduced by the inner wall (plunger) translational motion whereas no rotational motions as discussed earlier literatures will be considered.
In this paper, through the solution of the partial differential Equation (
25) in cylindrical coordinate systems, it is possible for us to derive the relaxation time scales and confirm the quasi-static nature in the majority of oil production systems and the related measuring technologies in particular the sampling frequency around 30 Hz. We will also delineate the transient or rather quasi-static time dependent leakage due to Poiseuille flow from that of Couette flow.
As the plunger is lifting up, the pressure difference , namely, − or the pressure gradient , namely, with denotes the plunge axial length will drive the fluid from the high pressure area, namely, the top of the plunger, to the low pressure area, namely, inside the pump chamber and below the plunger. This leakage is due to the so-called Poiseuille flow within the annulus region. It is clear that this leakage is due to the pressure difference. The other flow is due to the viscous shear of the plunger motion. It is important to recognize that during the upstroke, this part of flow rate is in the same direction of the plunger, in this case, from the bottom to the top, which is opposite to the leakage direction. This flow is due to the so-called Couette flow within the annulus region.
Consider a plunger and a barrel pump system with an inner radius
which is a half of the outer diameter (OD) of the plunger and an outer radius
which is the half of the inner diameter (ID) of the barrel, in fact, the width of the rectangular domain is simply the perimeter based on the outer radius of the plunger for this first order approximation as illustrated in
Figure 2. In practice, the plunger length is measured in inches or even feet whereas the gap size is measured in mills. Thus, the gap denoted as
or the clearance
C which is equivalent to
is very small in comparison with
and
. As a consequence, Equation (
25) in cylindrical coordinate systems can be expressed in Cartesian coordinate systems as illustrated in
Figure 2
with the boundary conditions
and
.
Notice that to prepare the discussion in
Section 3 with eccentricities, we use the gap function
where the coordinate
x is selected to represent the entire perimeter of the outer surface of the plunder or the inner surface of the barrel. In the concentric case, we of course have the constant
h which is defined as the gap size
.
Using the separation of variable method and common special functions [
29], we introduce
. As a consequence, we have
and the following governing equations
From Equation (40) and the corresponding boundary conditions, we can easily obtain the sinusoidal expansion of the function
, namely,
, with the modal sequence number
n. Thus, we have the evaluation of the relaxation time
expressed as
Notice that the Couette effects cannot be approximated by the special function in Equation (
32) because of the imposed boundary conditions [
30]. Consider a practical case with
in and
mill, the measured plunger velocity
can reach around 40 in/sec, namely,
in and
in. For the fluid considered in this paper, we set the density
as
and the plunger length
as
in. Assume the dynamics viscosity as
cp, we have the Reynolds number based on the clearance
as
which is much smaller than 100. Consequently, we have the following graphical representation in
Figure 3 of the determinant expressed in Equation (
30). The eigensolutions
with
relate to the non-dimensional characteristic time or relaxation time
. Using the parameters and material properties for the same test case,
ms,
ms, and
ms. In fact, the non-dimensional relaxation times
evaluated by the roots in
Figure 3 can be simply expressed as
. This observation is indeed confirmed by the simplification of the Bessel functions by the sinusoidal functions as
. It is clear that the typical sampling period of
ms is sufficiently larger than the five or six times the largest intrinsic relaxation time as predicted in
Figure 3. Therefore, the transient or time dependent effects can be ignored. This result is consistent with the finding using full fledged Bessel functions and also confirms the rationale for the non-dimensional quantity
chosen for
Figure 3.
4. Computational Approaches
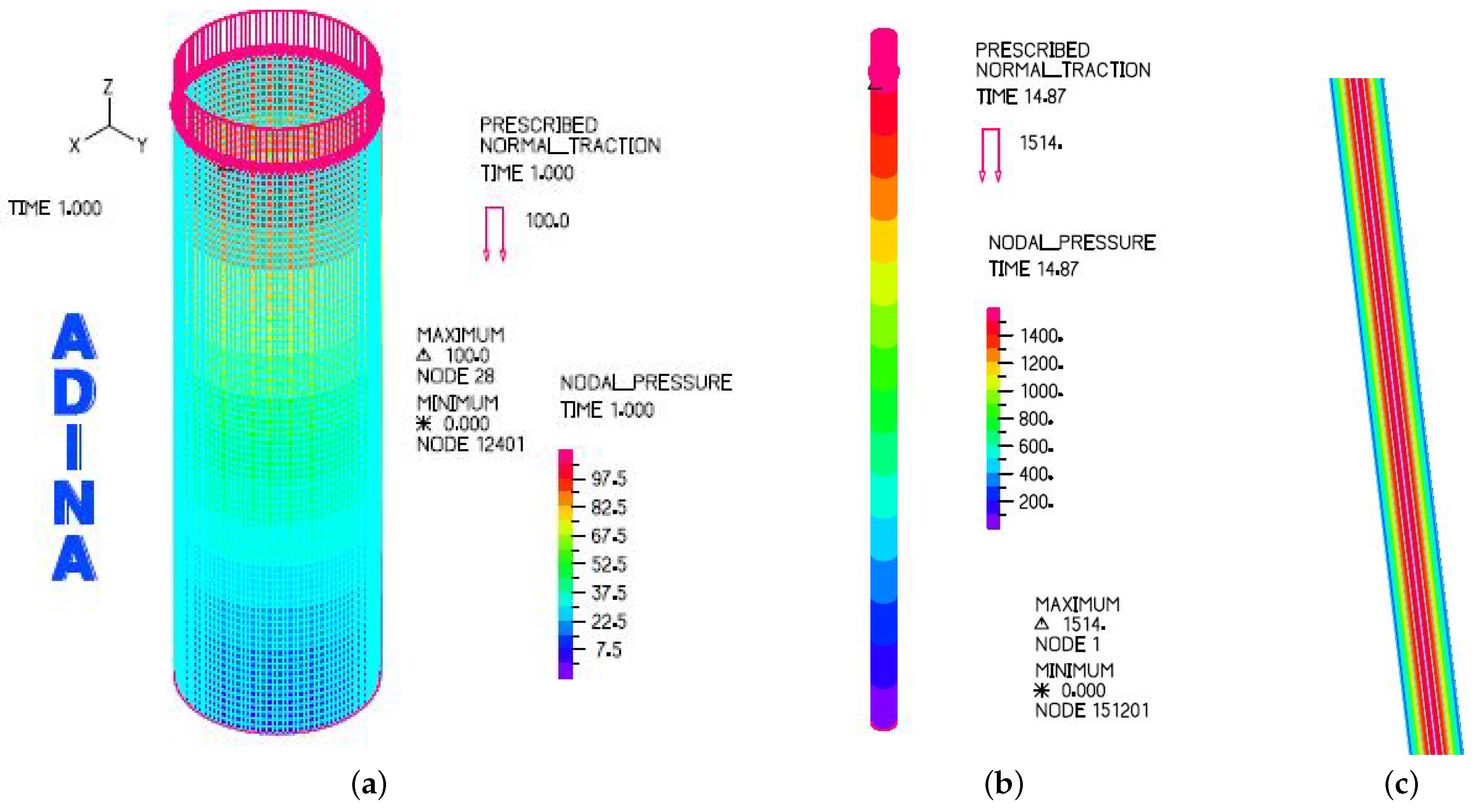
In the computational simulation with ADINA, as illustrated in
Figure 4, we applied the pressure differential for three out of four strokes, namely 1295 sample points or
s, leaving only the stroke during which both the traveling valve (TV) and the standing valve (SV) are closed. Notice that in this test case, we have the stroke per minute (SPM) as
, thus the period of the sucker rod pumping unit is about
s. To be consistent with the rate of 120 sampling points per second, namely, the sampling period
ms, the same time step size is also adopted. Furthermore, to keep the consistent units, in ADINA, the pressure unit is psi, the dynamic viscosity unit is psi·s as well. However, since the spatial dimension is represented with inch, therefore, the conversion factors
for gravitational constant and 12 for foot and inch conversion must be adopted in the left hand side (LHS) of the Navier-Stokes equation, which means, the density must be adjusted accordingly in addition to the standard conversion from kg/m
3 and lbm/ft
3. Therefore, the actual input to ADINA if the dimensions are in inche and the pressure differentials are in psi, thus we have
for effective density and
for effective dynamic viscosity.
Notice the challenges the extremely small gap size (a few mills, or a few thousandths of an inch) in comparison with the plunger length (
in) have posted to the meshing of the annulus flow region. In fact, in
Figure 4, in order to visualize the flow region, we have to zoom in further, as a result only a tiny segment of the annulus region could be depicted. Clearly, for the Poiseuille flow the velocity is zero at the outer surface of the plunger and the inner surface of the barrel as depicted in
Figure 4.
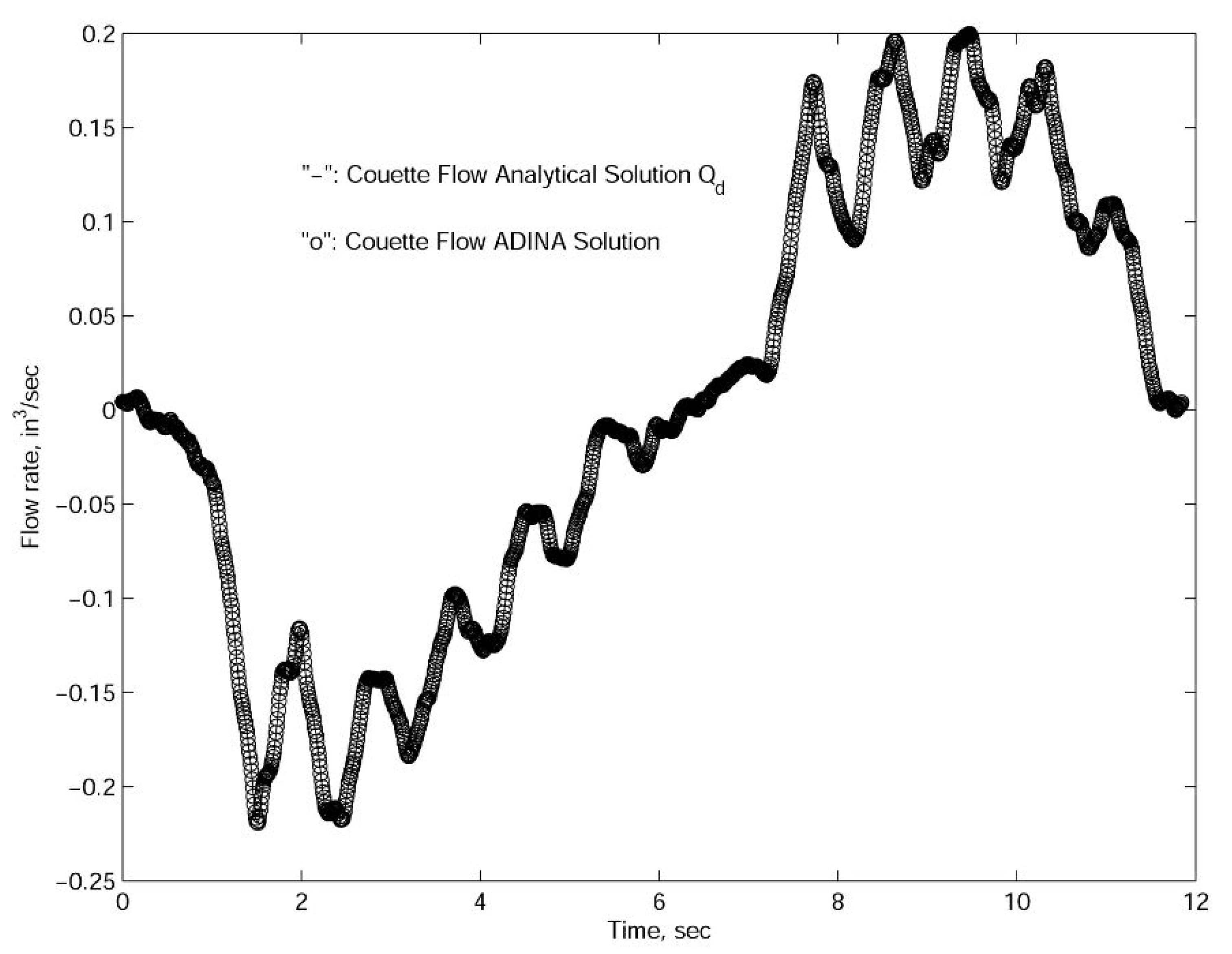
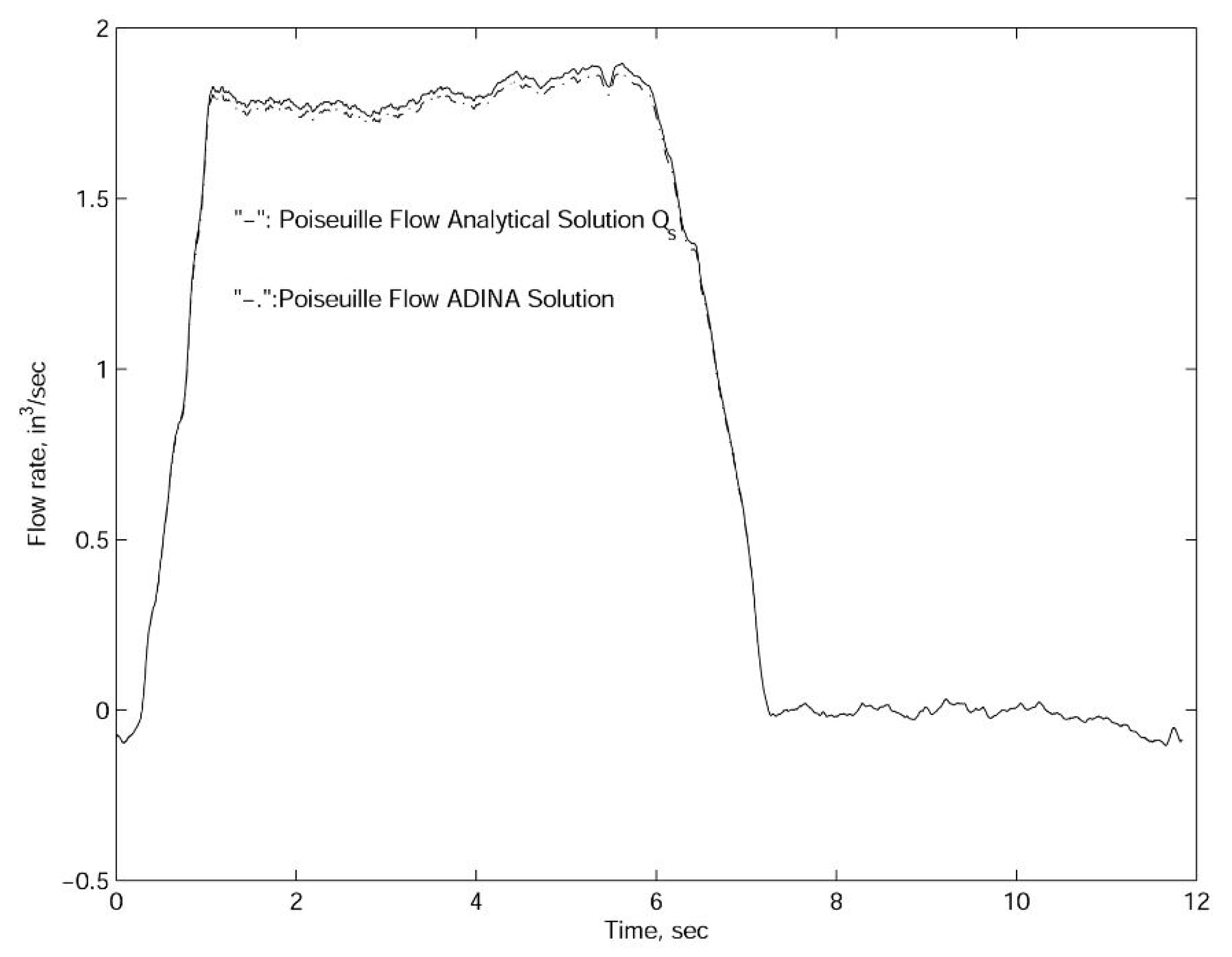
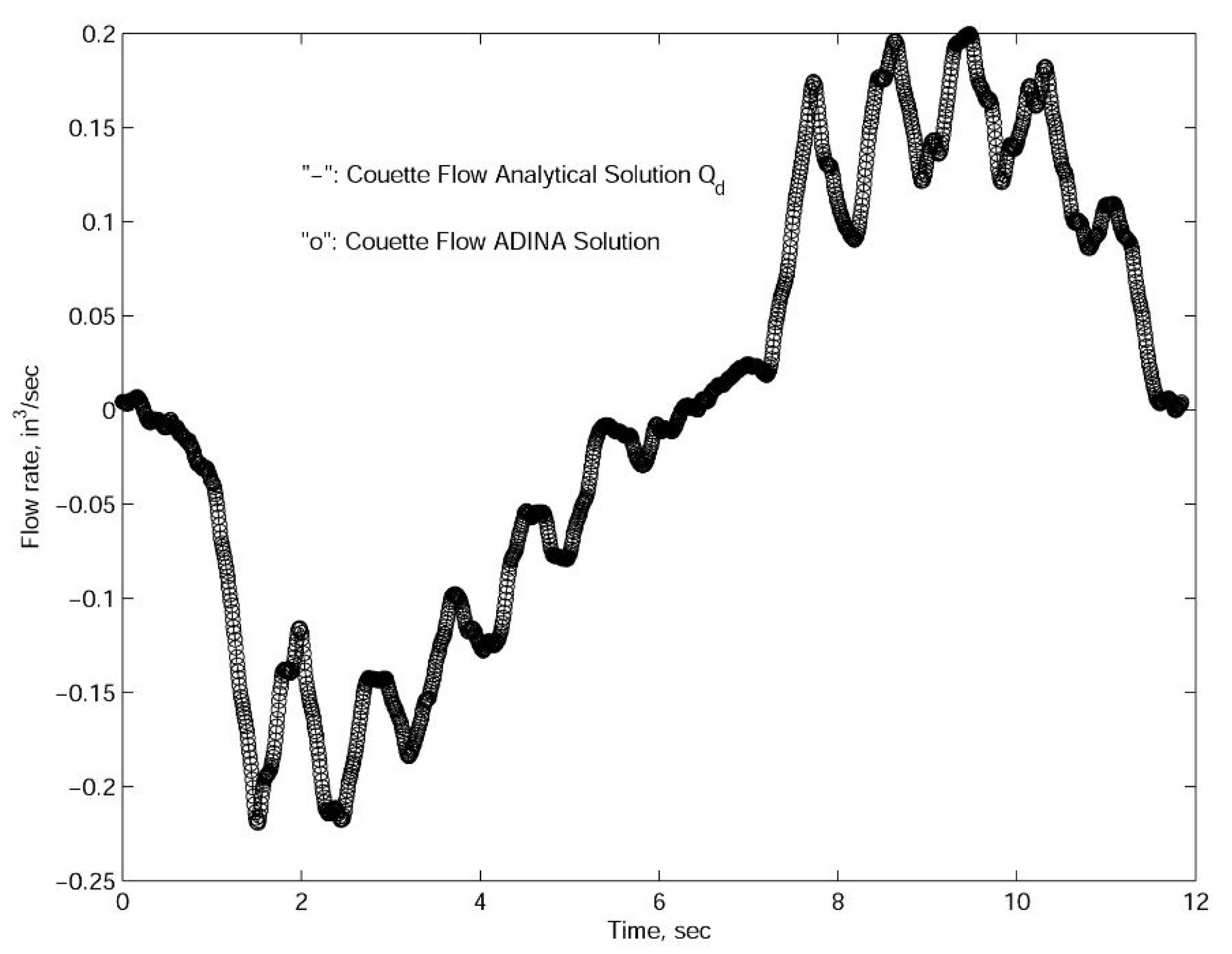
For the concentric case, we utilized the measured plunger velocity and pressure differential data provided by Echometer Company in Wichita Falls, Texas. As depicted in
Figure 5 and
Figure 6, the simulation results with the actual plunger velocity and pressure differential measurements as well as the inertial effects are nearly identical to those based on the quasi-static analytical results in Equations (
7) and (
12) which are evaluated without the inertial effects. This fact along with the relaxation time scales confirms that for the typical operation conditions illustrated in this paper and in engineering practice, the inertial effects within the annulus region is insignificant and can be ignored [
6,
28]. Again, according to the theoretical studies on the relaxation time scales which are confirmed with both the approximated rectangular flow region approximated with Fourier series and the cylindrical flow region calculated with Bessel functions, we can conclude that the time variations of the flow rate as represented in
Figure 5 and
Figure 6 are in fact quasi-static in nature. The time scales calculated in this paper also reflect the reality that in petroleum industries, the sampling period of
ms is sufficiently large in order to avoid the transient effects of flows within annulus regions of the sucker rod pump systems. Essentially, we could consider these time variations are snapshots of steady solutions since the relaxation time in the transition solution is very small in comparison with the sampling time.
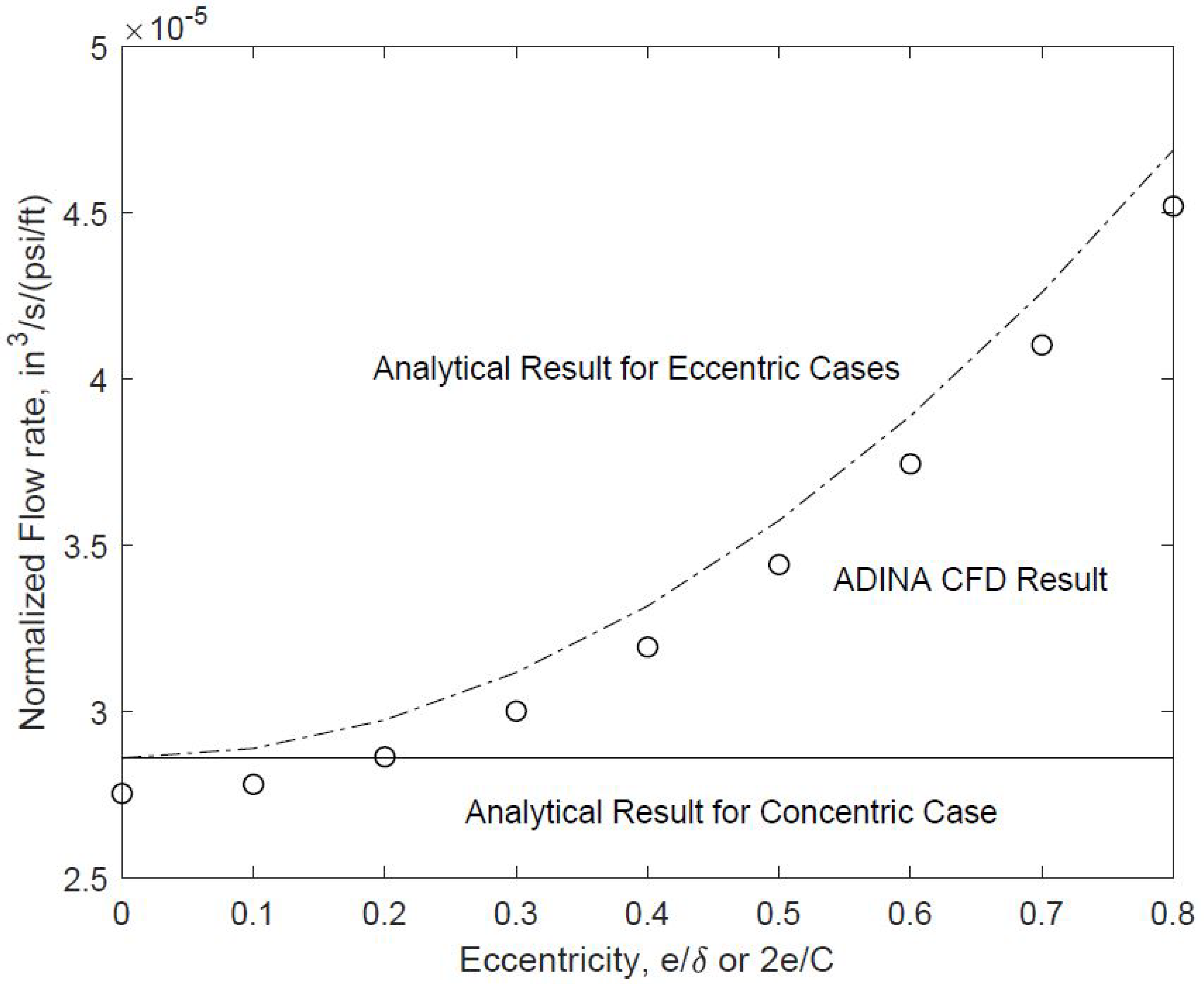
Finally, to incorporate the eccentricity effects, we have resorted to the full-fledged computational fluid dynamics simulation with ADINA [
16]. As shown in
Figure 5 of the recent ASME Journal of Fluids Engineering paper [
16], the computational results with eccentricities were compared with the corresponding concentric case. The new perturbations results depicted in Equation (
44) have been compared with the published results in Ref. [
16] and documented in
Figure 7. In this paper and the early ASME paper [
16], the eccentricity is measured by
, where
e is the shift of the center of the inner cylinder. Different from Ref. [
33], instead of studying the leakage rate vs. pump depth and upward moving process, in this paper, we focus on the degree of eccentricity measured by
, or
. For the case with
in and
mill, and the plunger length
ft, as illustrated in
Figure 7, which has also been confirmed by the recently published computational results in Ref. [
16], the misalignment can sometimes introduce up to
elevation of the leakage which is consistent with the analytical prediction based on the perturbation approaches in Equation (
44).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}