
Soap Film Visualization of a 10 cm-Span Flapping Wing



Abstract
1. Introduction
2. Aerodynamic Force Formulation of a FWMAV across a Soap Film
2.1. FWMAV Travels along the Soap Film Perpendicular to the Starboard Direction
2.2. FWMAV Penetrating the Soap Film Perpendicular to the Freestream Direction
3. Materials and Methods
3.1. Soap Film Frame
3.2. Soap Film Solution
3.3. High-Speed Camera
3.4. Background Lighting
3.5. FWMAV
3.6. Experiment Sequence
4. Results
4.1. FWMAV Travels along the Soap Film Perpendicular to the Starboard Direction
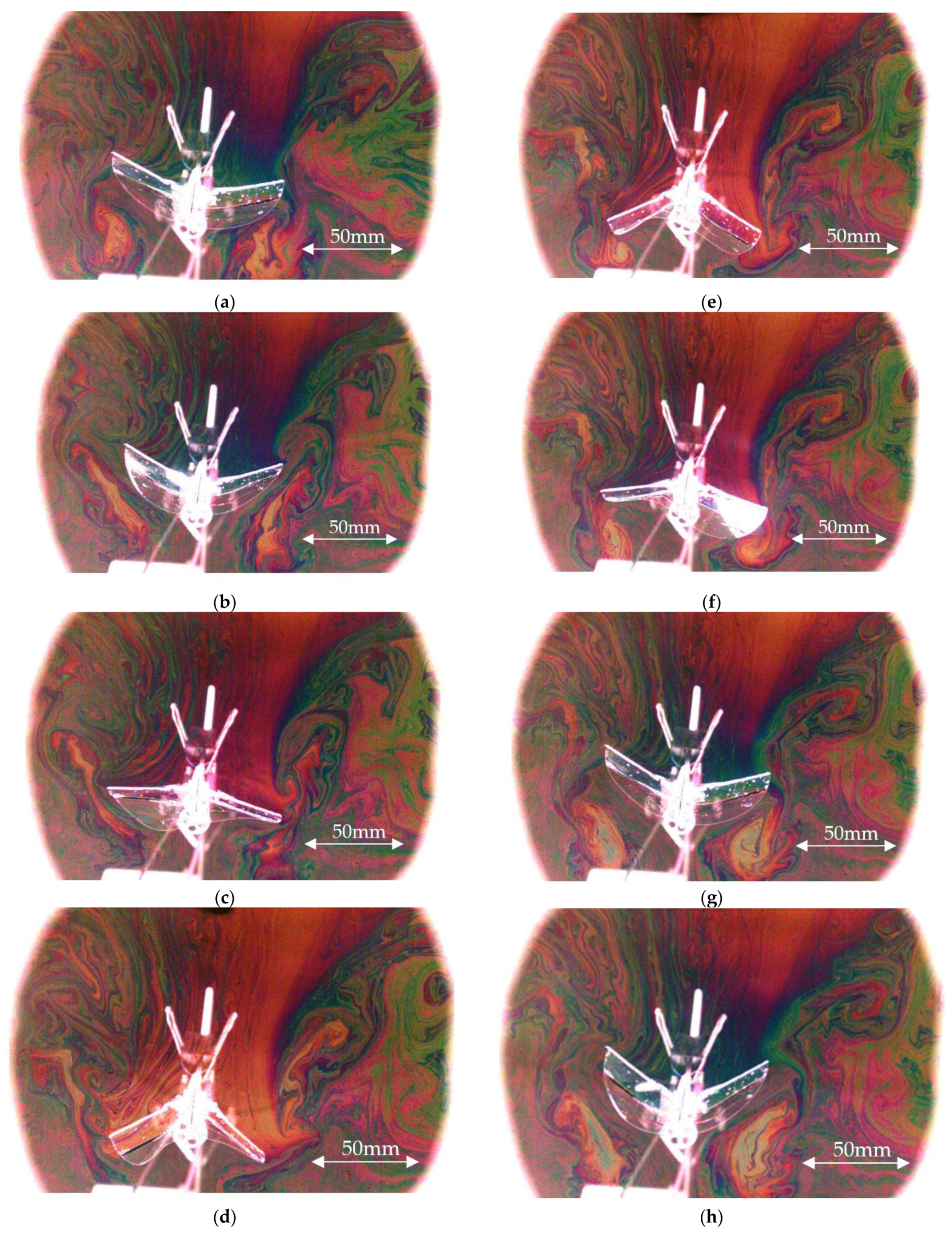
4.2. FWMAV Penetrating the Soap Film Perpendicular to the Freestream Direction
4.3. Image Processing
4.4. Force Comparison
5. Discussions and Conclusions
- This work preliminarily presents a soap film visualization technique to capture the unsteady flow images around a 10 cm-span FWMAV in a dynamic manner. Several flapping cycles have been recorded before the collapse of the soap film. Two experimental setups with the soap film plane perpendicular to starboard and streamwise directions have been demonstrated. The patterns of inverted Karman vortex and wing tip vortex were both successfully observed.
- A theoretical formulation about the relationship between the thickness matrix and the color matrix of the soap film is performed for evaluating the jet speed and the downwash speed. It is useful for calculating the thrust and lift of a FWMAV. The soap film visualization in this work can emergingly output quantitative results.
- After filtering the ripple noise deduced by the free-surface wave propagation which can be apparently observed in Figure 5 during flapping motion, the resultant thrust and lift waveforms come from the soap film images and the thickness fields are similar to the wind tunnel data preliminarily.
- The lift signal in Figure 9a of the soap film experiment for the 10 cm-span FWMAV is similar to the classical waveform in Figure 9c. Both of them have a trend agreed with the twin-peak phenomenon which is a manifestation of the “delayed stall” and “wake capture” lift mechanisms of wing flapping motion proposed by Dickinson [35]. However, the soap film time-averaged lift value (−0.8 gf) still deviates from the measured result (1.75 gf) of wind tunnel testing very much. The main reason is that the traveling speeds for the two cases (1.2 m/s vs. 0.15 m/s) are distinctly different.
- On the thrust signal in Figure 9b of the soap film experiment, it has a similar trend to the classical signal in Figure 9d and verifies that there are two positive thrust actions per flapping cycle in the real manner. In other words, either in downstroke or upstroke periods, the flapping wing always generates positive thrust to accelerate the FWMAV. Meanwhile, FWMAV generates positive lift only during the downstroke in general [10]. However, it is observed that for a single cycle, the time-averaged thrust of soap film (3.6 gf) is more than the wind tunnel force-gauge data (2.4 gf). It may be due to the inaccurate lift estimation from soap film experiment and the thrust calculation needs assistance from the lift data in Equation (13).
- Subject to the experimental setup of Section 2.1 and Section 2.2, the spanwise and streamwise flow fields will be stopped as the air flow touches the soap film in a normal manner. In addition, the FWMAV traveling speed is limited under 1.5 m/s now and not exactly appropriate to the case of forward flight. (Further, it is also hard to find out the wind tunnel testing counterpart for result comparison.) However, this method may have potential applications to investigate the flow field of hovering FWMAVs in the future [2,3,36].
- Globally, this soap film visualization is a low-cost method without dangerous concerns to study the unsteady flows of FWMAVs, and it can be as an option of flow visualization techniques besides the smoke tracing and PIV (particle image velocimetry).
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Shang, J.K.; Combes, S.A.; Finio, B.M.; Wood, R.J. Artificial insect wings of diverse morphology for flapping-wing micro air vehicles. Bioinspir. Biomim. 2009, 4, 036002. [Google Scholar] [CrossRef]
- Truong, Q.T.; Nguyen, Q.V.; Truong, V.T.; Park, H.C.; Byun, D.Y.; Goo, N.S. A modified blade element theory for estimation of forces generated by a beetle-mimicking flapping wing system. Bioinspir. Biomim. 2011, 6, 036008. [Google Scholar] [CrossRef]
- Keennon, M.; Klingebiel, K.; Won, H.; Andriukov, A. Development of the Nano Hummingbird, a tailless flapping wing micro air vehicle. In Proceedings of the American Helicopter Society Future Vertical Lift Aircraft Design Conference, San Francisco, CA, USA, 1 May 2012; pp. 1–24. [Google Scholar]
- de Croon, G.C.A.; Groen, M.A.; de Wagter, C.; Remes, B.; Ruijsink, R.; van Oudheusden, B.W. Design, aerodynamics and autonomy of the DelFly. Bioinspir. Biomim. 2012, 7, 025003. [Google Scholar] [CrossRef]
- Karásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.; de Croon, G.C.A. Tailless aerial robotic flapper reveals that flies use torque coupling in rapid banked turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef]
- Yang, L.J.; Balasubramanian, E.; Chandrasekhar, U.; Hung, K.C.; Cheng, C.M. Practical flapping mechanisms for 20 cm-wingspan micro air vehicles. Int. J. Micro Air Veh. 2015, 7, 181–202. [Google Scholar] [CrossRef]
- Yang, L.J. The micro-air-vehicle Golden Snitch and its Figure-of-8 flapping. J. Appl. Sci. Eng. 2012, 15, 197–212. [Google Scholar]
- Yang, L.J.; Hsiao, F.Y.; Tang, W.Z.; Huang, I.C. 3D flapping trajectory of a micro-air-vehicle and its application to unsteady flow simulation. Int. J. Adv. Robot. Syst. 2013, 10, 264. [Google Scholar] [CrossRef]
- Pornsinsirirak, T.N.; Tai, Y.C.; Nassef, H.; Ho, C.M. Titanium-alloy MEMS wing technology for a micro aerial vehicle application. Sens. Actuators A Phys. 2001, 89, 95–103. [Google Scholar] [CrossRef]
- Yang, L.J.; Ko, A.F.; Hsu, C.K. Wing stiffness on light flapping micro aerial vehicles. J. Aircr. 2012, 49, 423–431. [Google Scholar] [CrossRef]
- Hsiao, F.Y.; Yang, L.J.; Lin, S.H.; Chen, C.L.; Shen, J.F. Autopilots for ultralight weight robotic birds: Automatic altitude control and system integration of a sub-10 g weight flapping-wing micro air vehicle. IEEE Control Syst. Mag. 2012, 32, 35–48. [Google Scholar]
- Williamson, C.H. Vortex dynamics in the cylinder wake. Annu. Rev. Fluid Mech. 1996, 28, 477–539. [Google Scholar] [CrossRef]
- Bryant, M.; Mahtani, R.L.; Garcia, E. Wake synergies enhance performance in aero elastic vibration energy harvesting. J. Intell. Mater. Syst. Struct. 2012, 23, 1131–1141. [Google Scholar] [CrossRef]
- Liu, T.; Campbell, B.T.; Burns, S.P.; Sullivan, J.P. Temperature and pressure-sensitive luminescent paints in aerodynamics. Appl. Mech. Rev. 1997, 50, 227–246. [Google Scholar] [CrossRef]
- Engler, R.H.; Klein, C.; Trinks, O. Pressure sensitive paint systems for pressure distribution measurements in wind tunnels and turbomachines. Meas. Sci. Technol. 2000, 11, 1077. [Google Scholar] [CrossRef]
- Huang, C.Y.; Chen, Y.H.; Wan, S.A.; Wang, Y.C. Quantitative visualization of the leading-edge vortices on a delta wing by using pressure-sensitive paint. J. Micromech. Microeng. 2016, 26, 105002. [Google Scholar] [CrossRef]
- Ramasamy, M.; Leishman, J.G. Phase-locked particle image velocimetry measurements of a flapping wing. J. Aircr. 2006, 43, 1867–1875. [Google Scholar] [CrossRef]
- Flint, T.J.; Jeremy, M.C.; New, T.H.; Ho, W.H. Computational study of a pitching bio-inspired corrugated airfoil. Int. J. Heat Fluid Flow 2017, 65, 328–341. [Google Scholar] [CrossRef]
- Couder, Y.; Chomaz, J.M.; Rabaud, M. On the hydrodynamics of soap films. Phys. D Nonlinear Phenom. 1989, 37, 384–405. [Google Scholar] [CrossRef]
- Rutgers, M.A.; Wu, X.L.; Bhagavatula, R.; Petersen, A.A.; Goldburg, W.I. Two-dimensional velocity profiles and laminar boundary layers in flowing soap films. Phys. Fluids 1996, 8, 2847–2854. [Google Scholar] [CrossRef]
- Gharib, M.; Beizaie, M. Visualization of two-dimensional flows by a liquid (soap) film tunnel. J. Vis. 1999, 2, 119–126. [Google Scholar] [CrossRef]
- Zhang, J.; Childress, S.; Libchaber, A.; Shelley, M. Flexible filaments in a flowing soap film as a model for one-dimensional flags in a two-dimensional wind. Nature 2000, 408, 835. [Google Scholar] [CrossRef]
- Rutgers, M.A.; Wu, X.L.; Daniel, W.B. Conducting fluid dynamics experiments with vertically falling soap films. Rev. Sci. Instrum. 2001, 72, 3025–3037. [Google Scholar] [CrossRef]
- Haque, M.R.; Fayed, M.; Gunter, A.L.; Smadi, O.; Kadem, L.; Ng, H.D. Numerical simulation and flow visualization using soap film of the self-organized vortex structure in the wake of an array of cylinders. J. Vis. 2011, 14, 311–314. [Google Scholar] [CrossRef][Green Version]
- Georgiev, D.; Vorobieff, P. The slowest soap film tunnel in the Southwest. Rev. Sci. Instrum. 2002, 73, 1177–1184. [Google Scholar] [CrossRef]
- Fayed, M.; Portaro, R.; Gunter, A.L.; Abderrahmane, H.A.; Ng, H.D. Visualization of flow patterns past various objects in two-dimensional flow using soap film. Phys. Fluids 2011, 23, 091104. [Google Scholar] [CrossRef]
- Rivera, M.K.; Aluie, H.; Ecke, R.E. The direct enstrophy cascade of two-dimensional soap film glows. Phys. Fluids 2014, 26, 055105. [Google Scholar] [CrossRef]
- Feng, A.L. Numerical and Experimental Investigations on Lift of Flapping Wing MAV. Ph.D. Thesis, Mechanical and Electromechanical Engineering, Tamkang University, Taiwan, June 2019. (In Chinese). [Google Scholar]
- Liao, C.W. Fabrication of Flapping Micro Aerial Vehicles with 10 cm Wingspan. Master’s Thesis, Mechanical and Electromechanical Engineering, Tamkang University, Taiwan, June 2009. (In Chinese). [Google Scholar]
- Chen, Y.S. The Improvement on the Miniaturization of Flapping Micro Aerial Vehicles. Master’s Thesis, Mechanical and Electromechanical Engineering, Tamkang University, Taiwan, June 2011. (In Chinese). [Google Scholar]
- Huang, H.L. 2D Quasi-steady Flow around a Flapping Wing and its Bubble-film Visualization. Master’s Thesis, Mechanical and Electromechanical Engineering, Tamkang University, Taiwan, June 2014. (In Chinese). [Google Scholar]
- Roskam, J. Airplane Flight Dynamics and Automatic Flight Control; Roskam Aviation and Engineering Corp.: Lawrence, KS, USA, 1979; pp. 69, 78. [Google Scholar]
- Yang, L.J.; Waikhom, R.; Wang, W.C.; Jabaraj Joseph, V.; Esakki, B.; Kumar Unnam, N.; Li, X.H.; Lee, C.Y. Check-valve design in enhancing aerodynamic performance of flapping wings. Appl. Sci. 2021, 11, 3416. [Google Scholar] [CrossRef]
- Waikhom, R.; Yang, L.J.; Shih, H.Y.; Kuo, C.R. Self-heating CMOS flow sensor. In Proceedings of the 21st International Conference on Solid-State Sensors, Actuators and Microsystems (Transducers 2021), Orlando, FL, USA, 20–25 June 2021; pp. 1279–1282. [Google Scholar]
- Dickinson, M.H.; Lehmann, F.O.; Sane, S.P. Wing rotation and the aerodynamic basis of insect flight. Science 1999, 284, 1954–1960. [Google Scholar] [CrossRef]
- Phan, H.V.; Park, H.C. Mechanisms of collision recovery in flying beetles and flapping-wing robots. Science 2020, 370, 1214–1219. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Soap Film Normal Direction | Pro | Con |
|---|---|---|
| (a) Starboard | Up to 1.5 m/s Several cycles Lasts longer | |
| (b) Freestream | Outputs | Low speed~0.15 m/s One cycle |
| (c) Vertical | Up to 1.5 m/s Outputs | Less than one cycle Broken by wingtip right away |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yang, L.-J.; Tasupalli, C.; Waikhom, R.; Panchal, N. Soap Film Visualization of a 10 cm-Span Flapping Wing. Fluids 2021, 6, 361. https://doi.org/10.3390/fluids6100361
Yang L-J, Tasupalli C, Waikhom R, Panchal N. Soap Film Visualization of a 10 cm-Span Flapping Wing. Fluids. 2021; 6(10):361. https://doi.org/10.3390/fluids6100361
Chicago/Turabian StyleYang, Lung-Jieh, Chandrashekhar Tasupalli, Reshmi Waikhom, and Nikhil Panchal. 2021. "Soap Film Visualization of a 10 cm-Span Flapping Wing" Fluids 6, no. 10: 361. https://doi.org/10.3390/fluids6100361
APA StyleYang, L.-J., Tasupalli, C., Waikhom, R., & Panchal, N. (2021). Soap Film Visualization of a 10 cm-Span Flapping Wing. Fluids, 6(10), 361. https://doi.org/10.3390/fluids6100361