The Effects of Grid Accuracy on Flow Simulations: A Numerical Assessment

Abstract
1. Introduction
2. Governing Equations
3. Numerical Method
3.1. Compact Finite Difference Scheme
3.2. Temporal Discretization
3.3. Spatial Filtering
4. Flow Solution Results
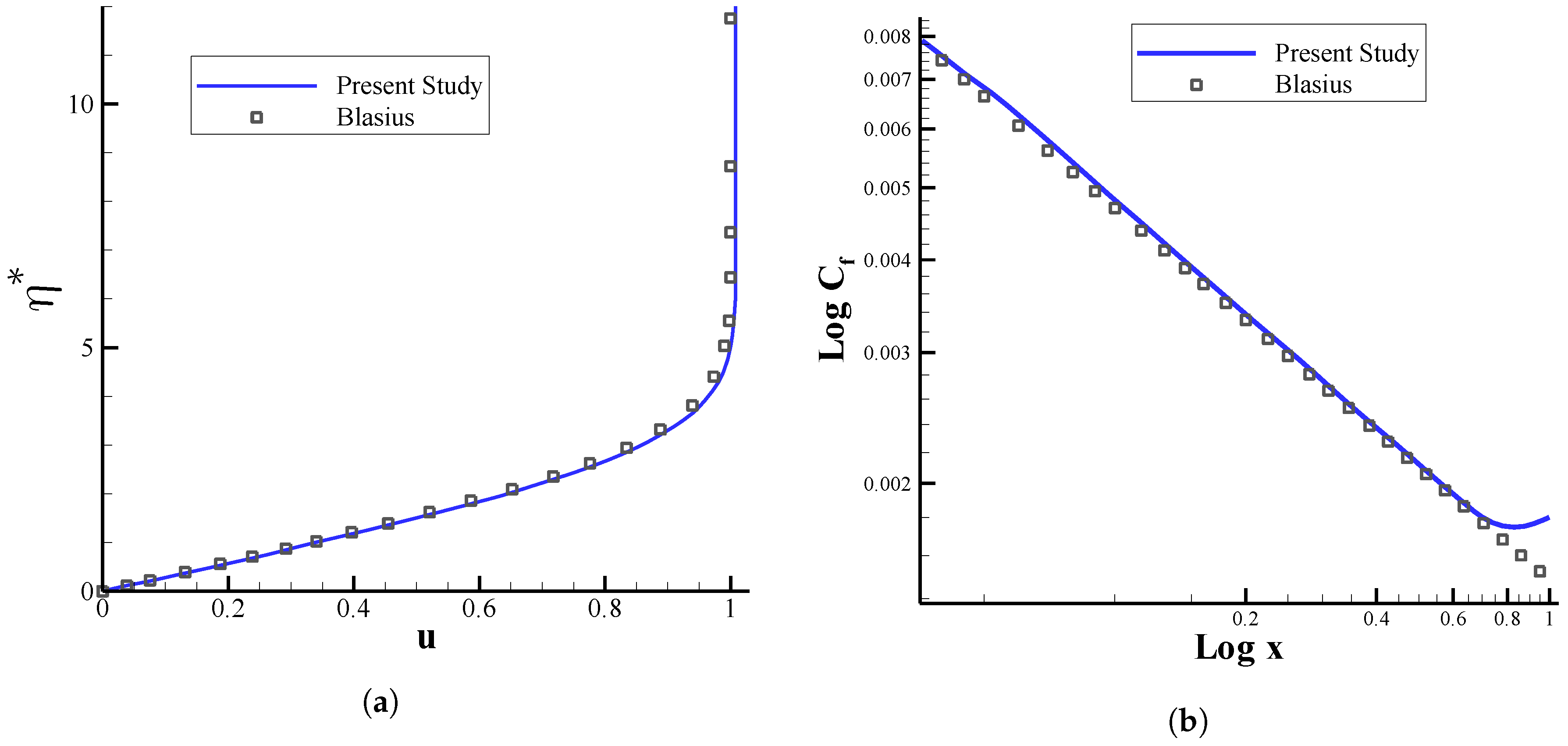
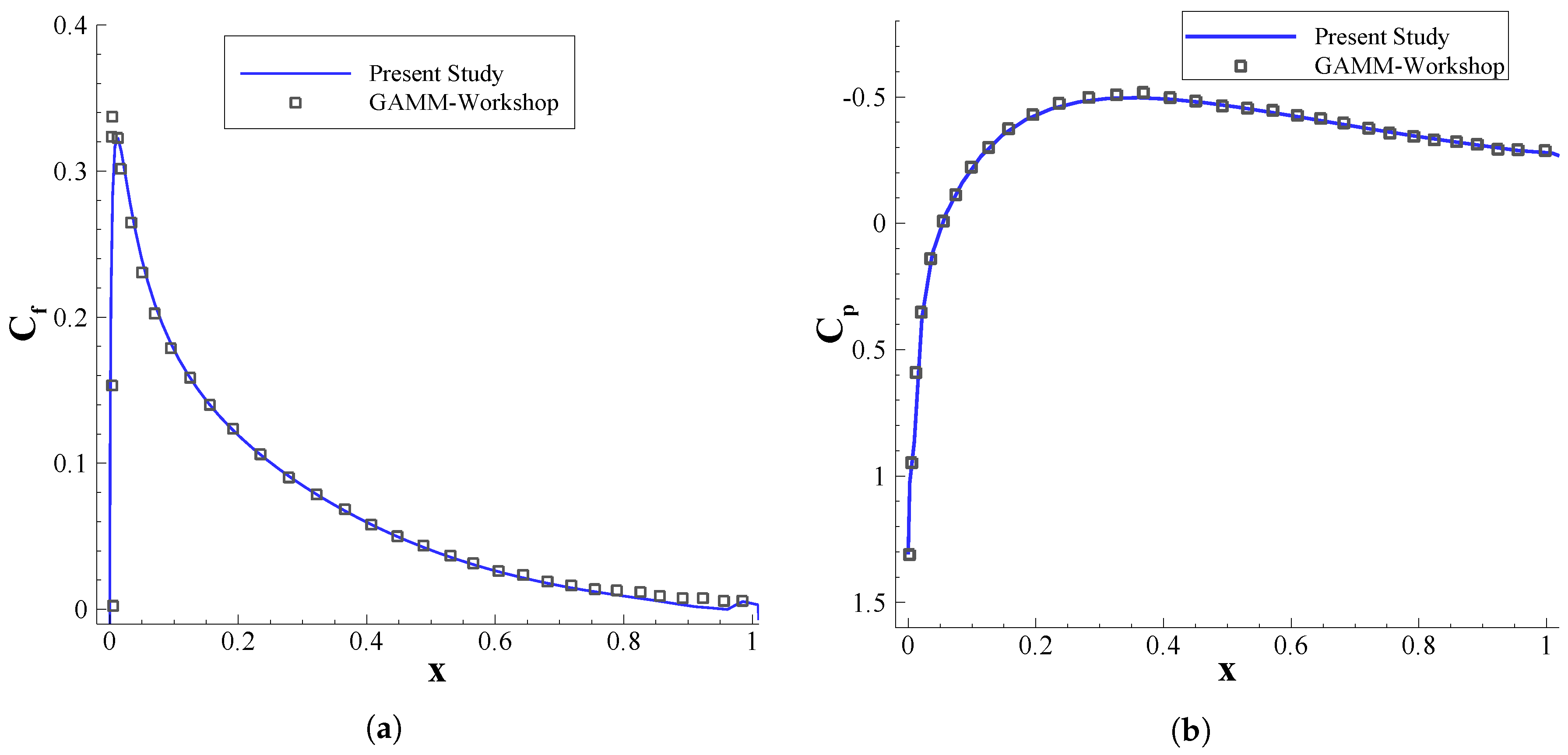
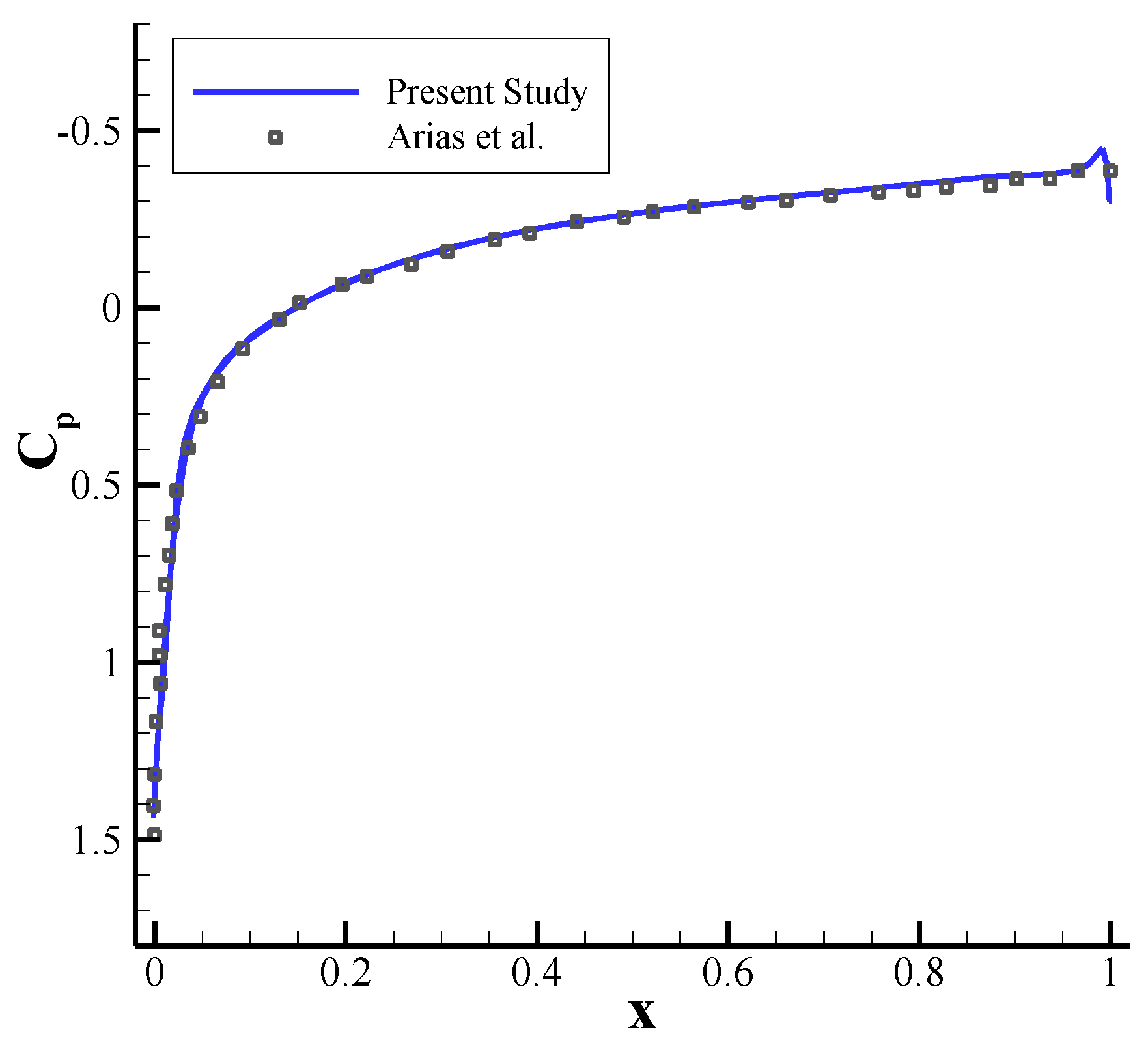
4.1. Numerical Validation
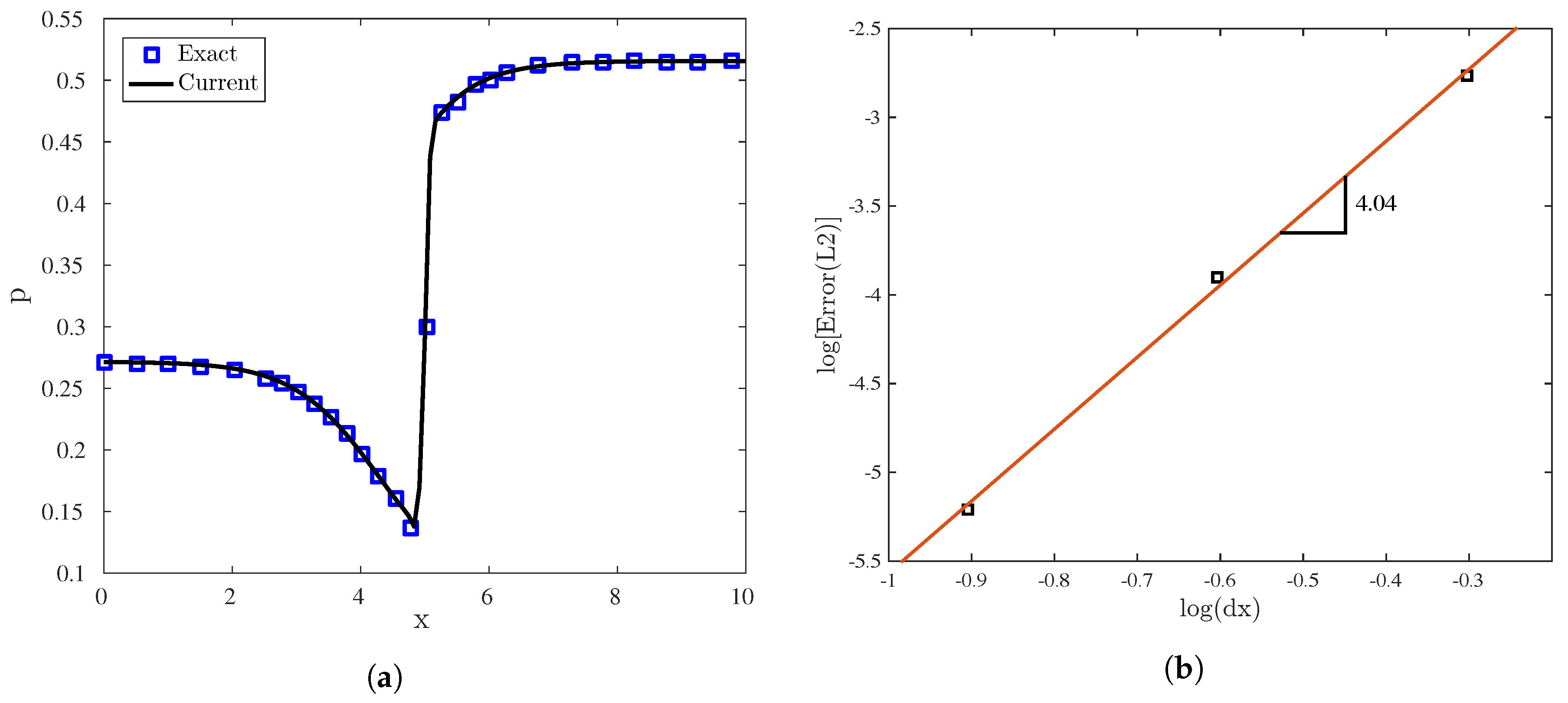
4.2. Accuracy Study
5. Grid Generation
Elliptic Method
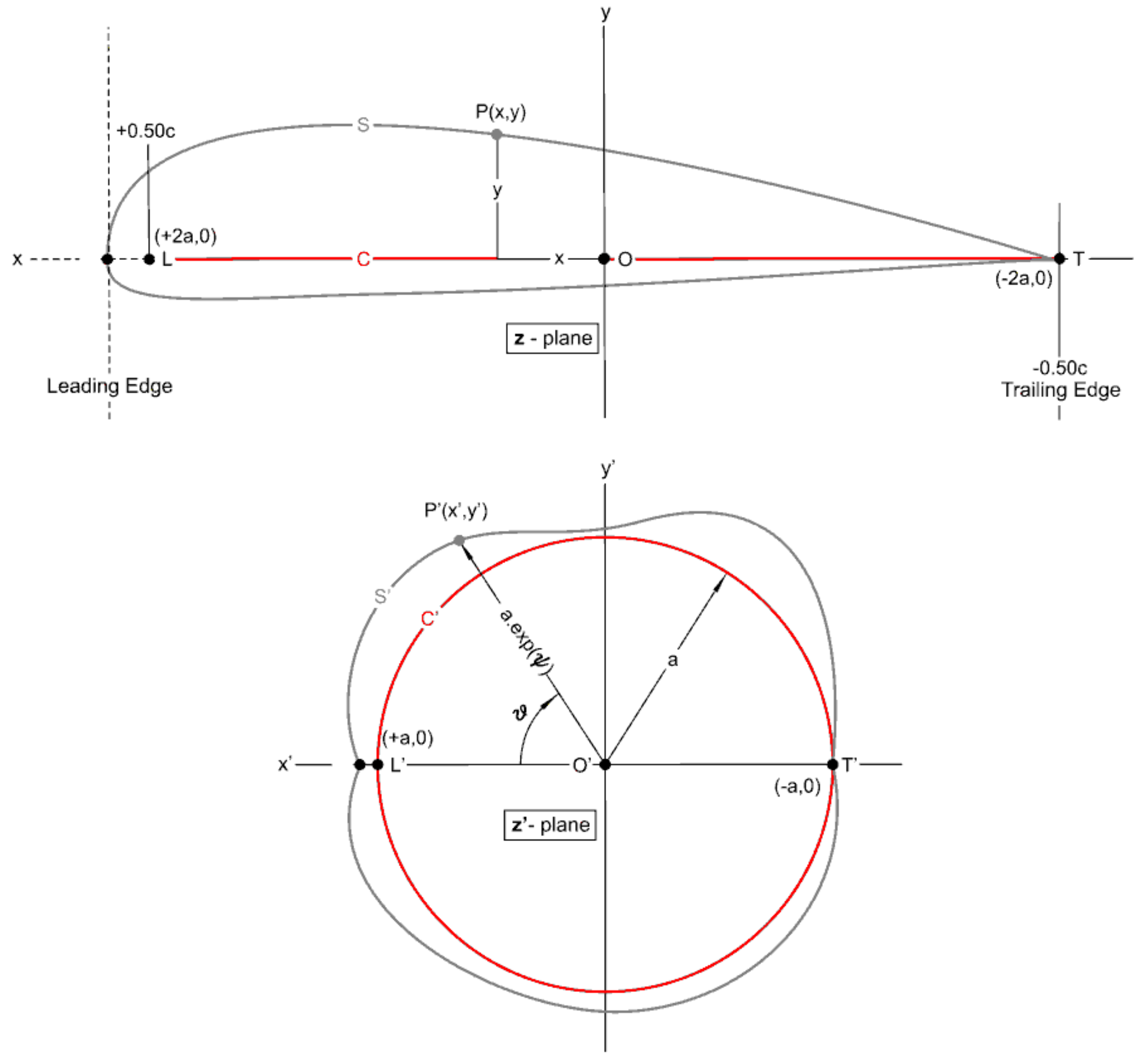
6. Conformal Mapping
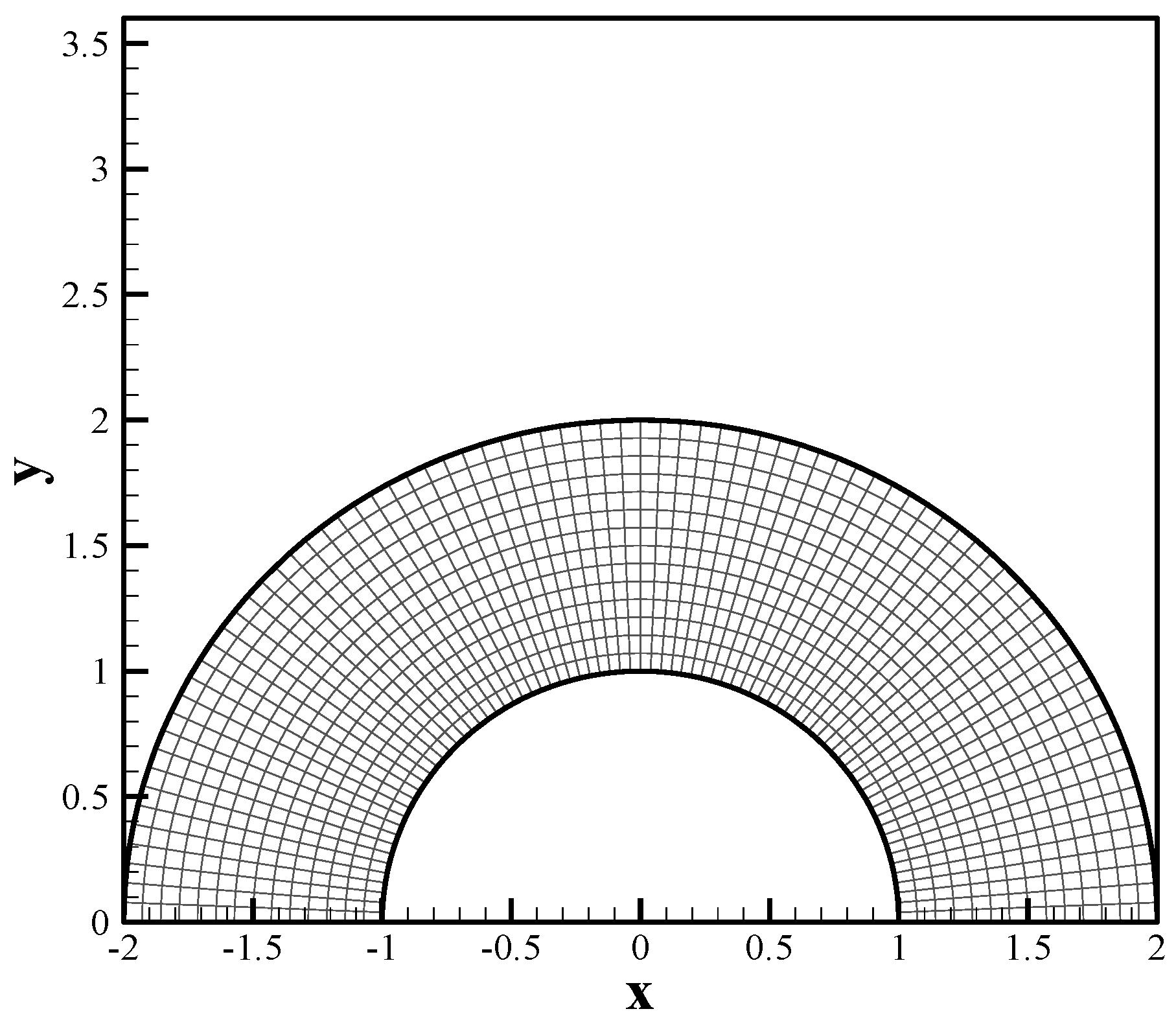
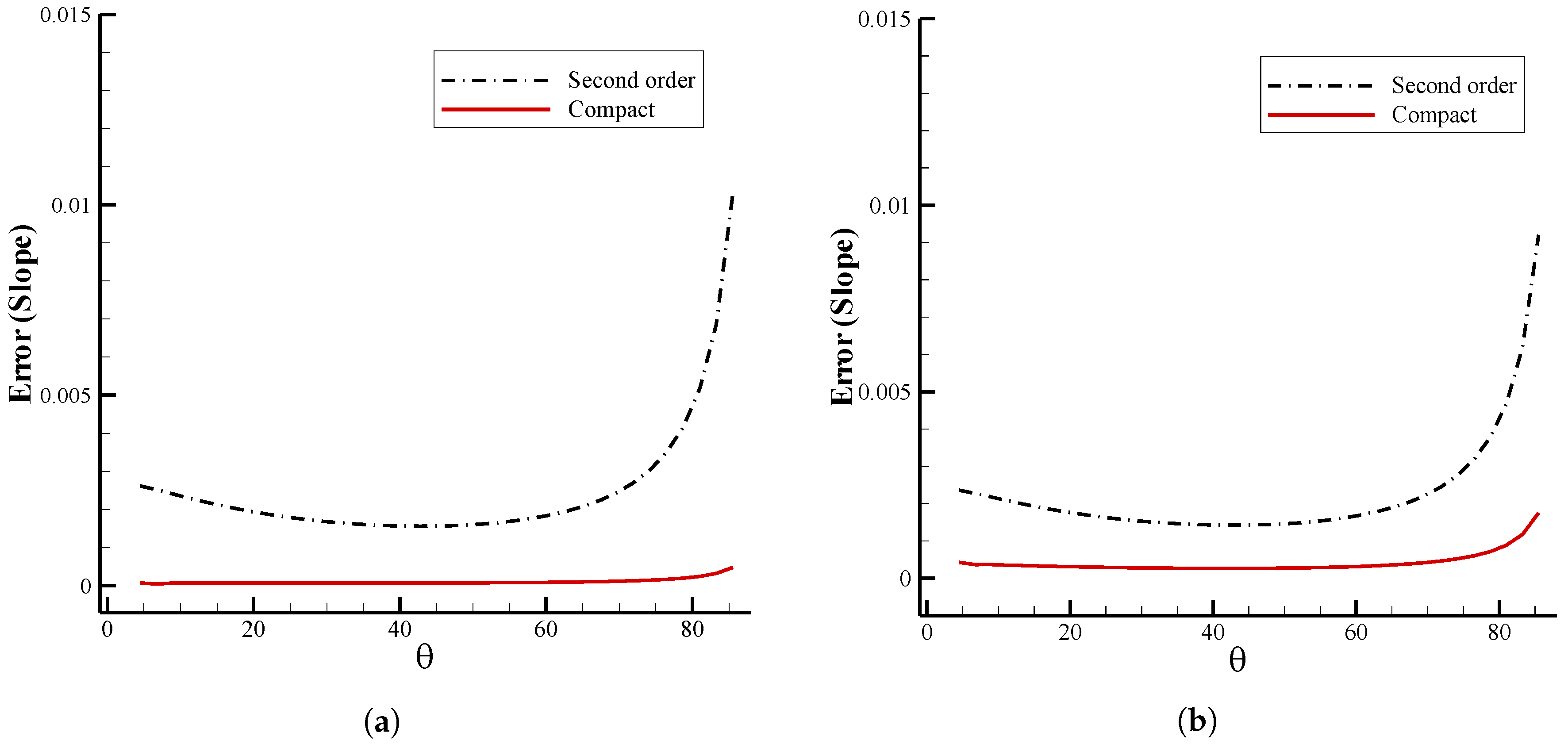
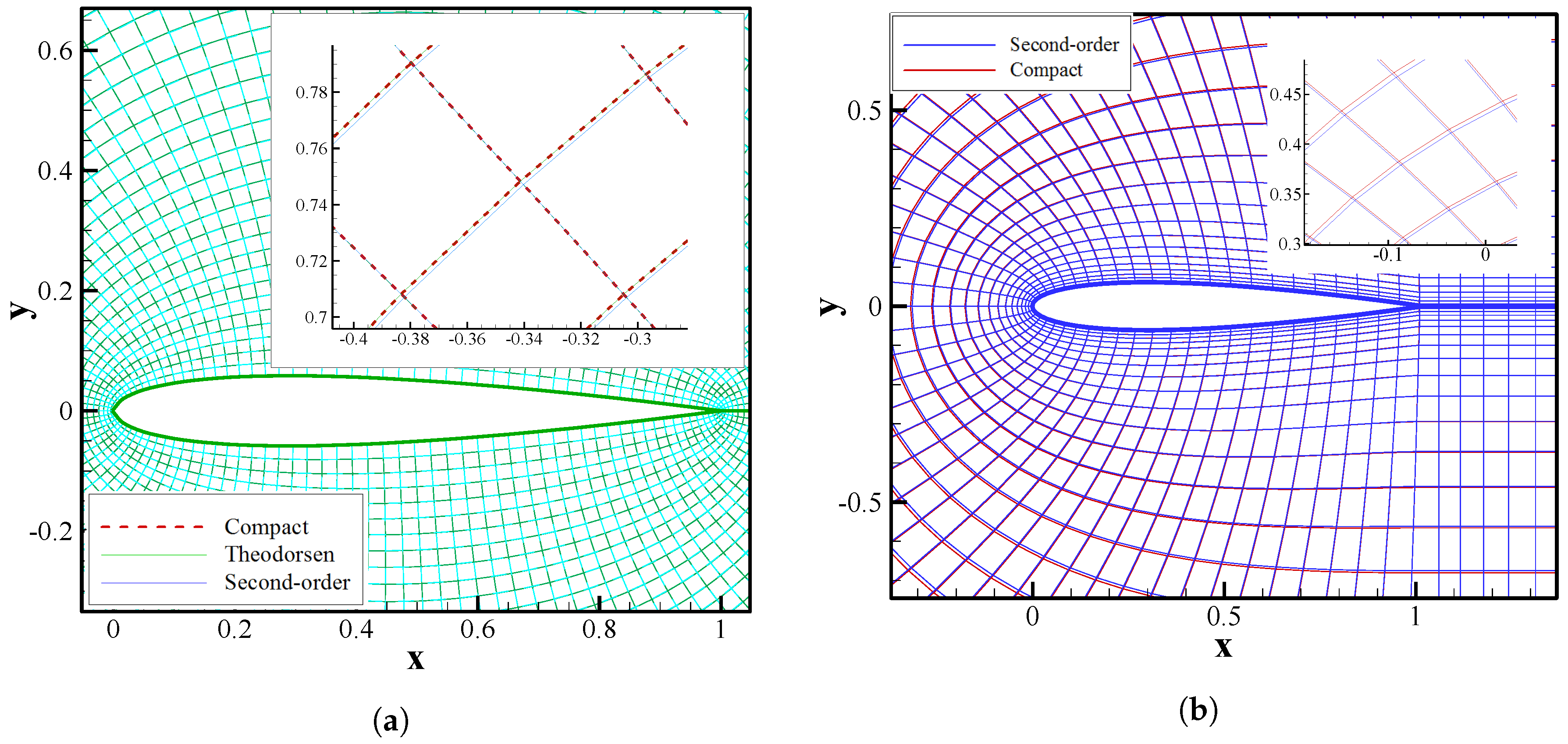
7. Grid Generation Results
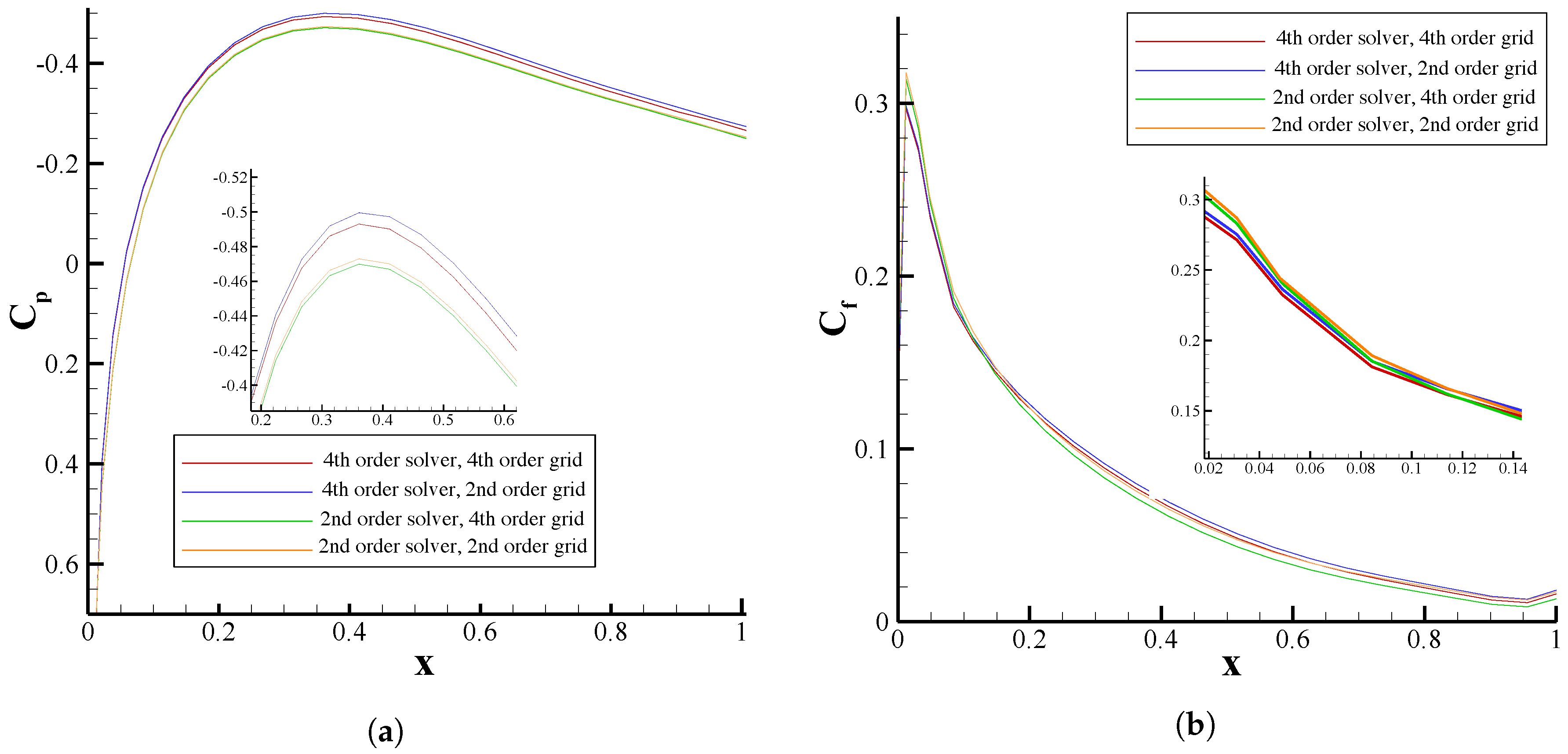
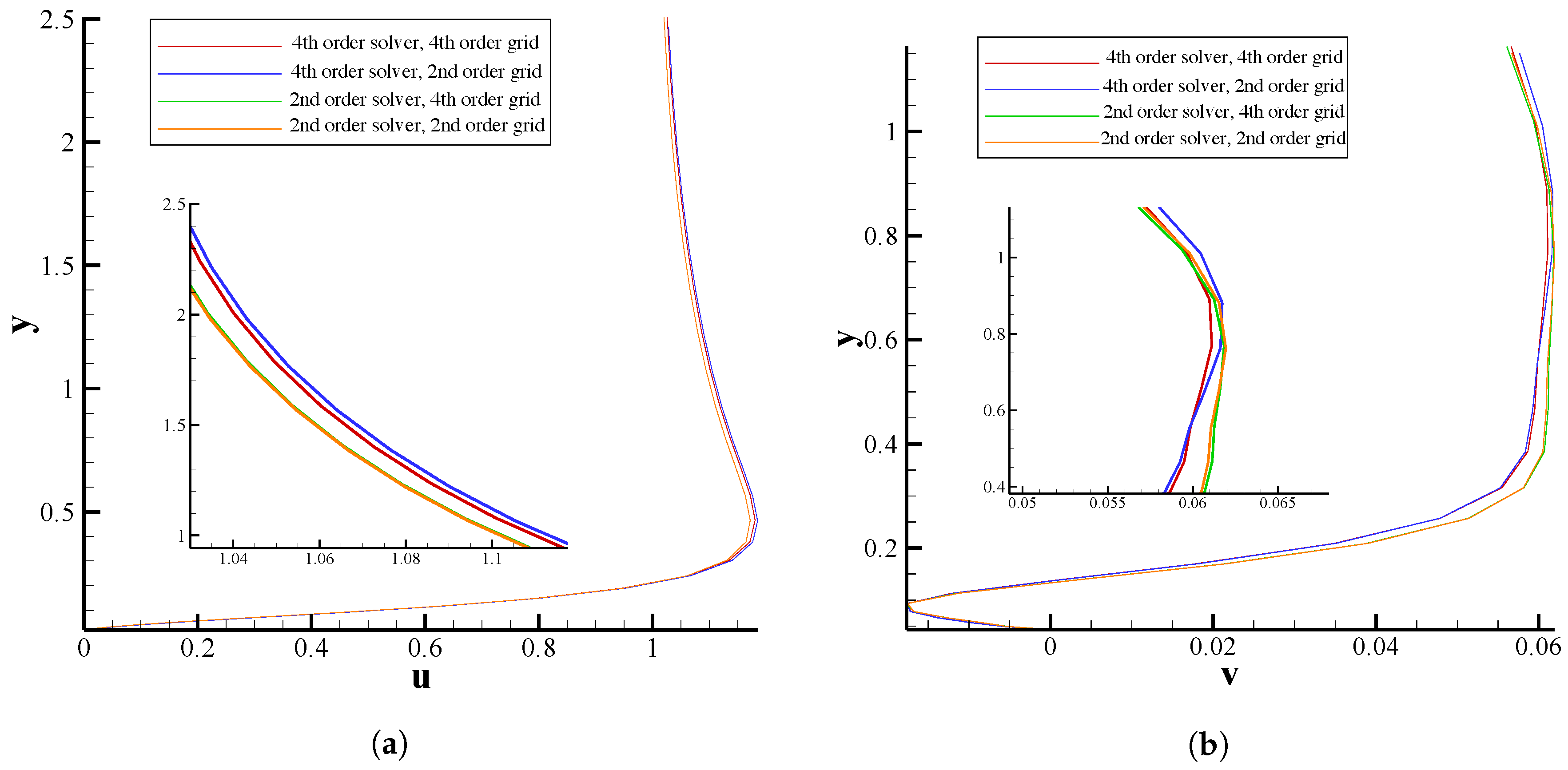
8. The Effect of the Grid Accuracy on Flow Solutions
9. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Soni, B.K. Grid generation: Past, present, and future. Appl. Numer. Math. 2000, 32, 361–369. [Google Scholar] [CrossRef]
- Matsuno, K. High-order upwind method for hyperbolic grid generation. Comput. Fluids 1999, 28, 825–851. [Google Scholar] [CrossRef]
- Vincent, P.E.; Jameson, A. Facilitating the adoption of unstructured high-order methods amongst a wider community of fluid dynamicists. Math. Model. Nat. Phenom. 2011, 6, 97–140. [Google Scholar] [CrossRef]
- Wang, Z.; Fidkowski, K.; Abgrall, R.; Bassi, F.; Caraeni, D.; Cary, A.; Deconinck, H.; Hartmann, R.; Hillewaert, K.; Huynh, H.; et al. High-order CFD methods: Current status and perspective. Int. J. Numer. Methods Fluids 2013, 72, 811–845. [Google Scholar] [CrossRef]
- Conti, C.; Morandi, R.; Spitaleri, R.M. On a mixed algebraic approach for generation and optimization of structured grids. In Proceedings of the 17th IMACS World Congress, Paris, France, 11–15 July 2005; pp. 1–8. [Google Scholar]
- Gouin, M.; Ducrozet, G.; Ferrant, P. Propagation of 3D nonlinear waves over an elliptical mound with a high-order spectral method. Eur. J. Mech. B/Fluids 2017, 63, 9–24. [Google Scholar] [CrossRef]
- Allahyari, M.; Mohseni, K. Numerical simulation of canonical shock/turbulence interaction using observable Navier-Stokes equations. Comput. Fluids 2020. Under Review. [Google Scholar]
- Schaupp, C.; Sesterhenn, J.; Friedrich, R. On a method for direct numerical simulation of shear layer/compression wave interaction for aeroacoustic investigations. Comput. Fluids 2008, 37, 463–474. [Google Scholar] [CrossRef]
- Emmett, M.; Zhang, W.; Bell, J.B. High-order algorithms for compressible reacting flow with complex chemistry. Combust. Theory Model. 2014, 18, 361–387. [Google Scholar] [CrossRef]
- Allahyari, M.; Mohseni, K. Simulation of compressible flows and shock turbulence interaction using observable Euler and Navier-Stokes equations. Proceeding Aps Meet. Abstr. 2017, 62, A29.00006. [Google Scholar]
- Allahyari, M.; Mohseni, K. Numerical simulation of flows with shocks and turbulence using observable methodology. In 2018 AIAA Aerospace Sciences Meeting; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2018; p. AIAA 2018-0066. [Google Scholar] [CrossRef]
- Lele, S.K. Compact finite difference schemes with spectral-like resolution. J. Comput. Phys. 1992, 103, 16–42. [Google Scholar] [CrossRef]
- Laizet, S.; Lamballais, E. High-order compact schemes for incompressible flows: A simple and efficient method with quasi-spectral accuracy. J. Comput. Phys. 2009, 228, 5989–6015. [Google Scholar] [CrossRef]
- Wang, Y.M.; Zhang, H.B. Higher-order compact finite difference method for systems of reaction–diffusion equations. J. Comput. Appl. Math. 2009, 233, 502–518. [Google Scholar] [CrossRef]
- Brady, P.; Livescu, D. High-order, stable, and conservative boundary schemes for central and compact finite differences. Comput. Fluids 2019, 183, 84–101. [Google Scholar] [CrossRef]
- Rahbari, I.; Paniagua, G. Acoustic streaming in turbulent compressible channel flow for heat transfer enhancement. J. Fluid Mech. 2020, 889, A2. [Google Scholar] [CrossRef]
- Esfahanian, V.; Allahyari, M.; Hedayat, M. High order compact finite difference on multiblock domains with parallelization. In Proceedings of the 15th Conference on Fluid Dynamics, fd2013, Bandar Abbas, Iran, 18–20 December 2013. [Google Scholar]
- Esfahanian, V.; Hedayat, M.; Baghapour, B.; Torabzadeh, M.; Hosseini, S. An Implicit Multigrid Solver for High-Order Compressible Flow Simulations on GPUs; APCOM & ISCM: Singapore, 2013. [Google Scholar]
- Karman, S.L.; Erwin, J.T.; Glasby, R.S.; Stefanski, D. High-order mesh curving using WCN mesh optimization. In Proceedings of the 46th AIAA Fluid Dynamics Conference, Washington, DC, USA, 13–17 June 2016; p. AIAA 2016-3178. [Google Scholar]
- Engvall, L.; Evans, J. Towards geometrically exact higher-order unstructured mesh generation. In Proceedings of the 25th International Meshing Roundtable, Washington, DC, USA, 26–30 September 2016. [Google Scholar]
- Fortunato, M.; Persson, P.O. High-order unstructured curved mesh generation using the Winslow equations. J. Comput. Phys. 2016, 307, 1–14. [Google Scholar] [CrossRef]
- Zhao, Z.; Li, M.; He, L.; Shao, S.; Zhang, L. High-order curvilinear mesh generation technique based on an improved radius basic function approach. Int. J. Numer. Methods Fluids 2019, 91, 97–111. [Google Scholar] [CrossRef]
- Baker, T.J. Mesh generation: Art or science? Prog. Aerosp. Sci. 2005, 41, 29–63. [Google Scholar] [CrossRef]
- Wang, J.; Zhong, W.; Zhang, J. A general meshsize fourth-order compact difference discretization scheme for 3D Poisson equation. Appl. Math. Comput. 2006, 183, 804–812. [Google Scholar] [CrossRef]
- Shirayama, S. Effect of grid quality on the accuracy and convergency of computations. In Proceedings of the 13th Computational Fluid Dynamics Conference, Snowmass Village, CO, USA, 29 June–2 July 1997. [Google Scholar]
- Farooq, M.A.; Müller, B. Accuracy assessment of the Cartesian grid method for compressible inviscid flows using a simplified ghost point treatment. J. Struct. Mech. 2011, 44, 279–291. [Google Scholar]
- Karcz, J.; Kacperski, L. An effect of grid quality on the results of numerical simulations of the fluid flow field in an agitated vessel. In Proceedings of the 14th European Conference on Mixing, Warszawa, Poland, 10–13 September 2012; pp. 205–210. [Google Scholar]
- Sankaranarayanan, S.; Spaulding, M.L. A study of the effects of grid non-orthogonality on the solution of shallow water equations in boundary-fitted coordinate systems. J. Comput. Phys. 2003, 184, 299–320. [Google Scholar] [CrossRef]
- Bagade, P.M.; Bhumkar, Y.G.; Sengupta, T.K. An improved orthogonal grid generation method for solving flows past highly cambered aerofoils with and without roughness elements. Comput. Fluids 2014, 103, 275–289. [Google Scholar] [CrossRef]
- Akcelik, V.; Jaramaz, B.; Ghattas, O. Nearly Orthogonal Two-Dimensional Grid Generation with Aspect Ratio Control. J. Comput. Phys. 2001, 171, 805–821. [Google Scholar] [CrossRef]
- Huang, H.; Prosperetti, A. Effect of grid orthogonality on the solution accuracy of the two-dimensional convection-diffusion equation. Numer. Heat Transf. 1994, 26, 1–20. [Google Scholar] [CrossRef]
- Putman, W.M.; Lin, S.J. Finite-volume transport on various cubed-sphere grids. J. Comput. Phys. 2007, 227, 55–78. [Google Scholar] [CrossRef]
- Boyle, R.J.; Ameri, A.A. Grid orthogonality effects on predicted turbine midspan heat transfer and performance. J. Turbomach. 1997, 119, 31–38. [Google Scholar] [CrossRef]
- Hefny, M.M.; Ooka, R. CFD analysis of pollutant dispersion around buildings: Effect of cell geometry. Build. Environ. 2009, 44, 1699–1706. [Google Scholar] [CrossRef]
- Beam, R.M.; Warming, R.F. An implicit finite-difference algorithm for hyperbolic systems in conservation-law form. J. Comput. Phys. 1976, 22, 87–110. [Google Scholar] [CrossRef]
- Douglas, J.; Gunn, J.E. A general formulation of alternating direction methods. Numer. Math. 1964, 6, 428–453. [Google Scholar] [CrossRef]
- Janenko, N.N. The Method of Fractional Steps; Springer: Berlin/Heidelberg, Germany, 1971. [Google Scholar]
- Zhang, X.; Blaisdell, G.A.; Lyrintzis, A.S. High-order compact schemes with filters on multi-block domains. J. Sci. Comput. 2004, 21, 321–339. [Google Scholar] [CrossRef]
- Visbal, M.R.; Gaitonde, D.V. High-order-accurate methods for complex unsteady subsonic flows. AIAA J. 1999, 37, 1231–1239. [Google Scholar] [CrossRef]
- Gaitonde, D.V.; Visbal, M.R. Pade-type higher-order boundary filters for the Navier-Stokes equations. AIAA J. 2000, 38, 2103–2112. [Google Scholar] [CrossRef]
- Messiter, A.F. Boundary-layer flow near the trailing edge of a flat plate. SIAM J. Appl. Math. 1970, 18, 241–257. [Google Scholar] [CrossRef]
- Bristeau, M.O.; Glowinski, R.; Periaux, J.; Viviand, H. Numerical Simulation of Compressible Navier-Stokes Flows: A GAMM-Workshop; Notes on Numerical Fluid Mechanics; Springer Science & Business Media: Braunschweig, Germany, 1987; Volume 18. [Google Scholar]
- Arias, O.; Falcinelli, O.; Fico, N.; Elaskar, S. Finite volume simulation of a flow over a NACA 0012 using Jameson, MacCormack, Shu and TVD esquemes. Mec. Comput. 2007, 26, 3097–3116. [Google Scholar]
- Shubin, G.; Stephens, A.; Glaz, H. Steady shock tracking and Newton’s method applied to one-dimensional duct flow. J. Comput. Phys. 1981, 39, 364–374. [Google Scholar] [CrossRef]
- Joun, C.T.; Dale, A.A.; Richard, H.P. Computational Fluid Mechanics and Heat Transfer; Taylor & Francis: Gainesville, FL, USA, 1997. [Google Scholar]
- Sorenson, S. A Computer Program to Generate Two-Dimensional Grids about Airfoils and Other Shapes by the Use of Poisson’s Equation; Technical Report NASA-TM-81198; NASA Ames Research Center: Moffett Field, CA, USA, 1980. [Google Scholar]
- Theodorsen, T. Theory of Wing Section of Arbitrary Shapes; Technical Report NACA-TR-411; NACA Langley Aeronautical Lab: Langley Field, VA, USA, 1931. [Google Scholar]
- Theodorsen, T.; Garrick, I.E. General potential theory of arbitrary wing sections. In Classical Aerodynamic Theory; Jones, R.T., Ed.; National Aeronautics and Space Administration: Moffett Field, CA, USA, 1979; pp. 257–290. [Google Scholar]
- McMasters, J.H.; Henderson, M.L. Low speed single element airfoil synthesis. In Science and Technology of Low Speed and Motorless Flight; Hanson, P.W., Ed.; NASA Conference Publication: Hampton, VA, USA, 1979; pp. 1–31. [Google Scholar]
- Yousefi, K.; Razeghi, A. Determination of the critical Reynolds number for flow over symmetric NACA airfoils. In Proceedings of the 2018 AIAA Aerospace Sciences Meeting, Kissimmee, FL, USA, 8–12 January 2018; p. AIAA 2018-0818. [Google Scholar]
- Wang, J.; Nakata, T.; Liu, H. Development of mixed flow fans with bio-inspired grooves. Biomimetics 2019, 4, 72. [Google Scholar] [CrossRef] [PubMed]
- Forrer, H.; Jeltsch, R. A higher-order boundary treatment for Cartesian-grid methods. J. Comput. Phys. 1998, 140, 259–277. [Google Scholar] [CrossRef]
- Gullbrand, J.; Bai, X.S.; Fuchs, L. High-order Cartesian grid method for calculation of incompressible turbulent flows. Int. J. Numer. Methods Fluids 2001, 36, 687–709. [Google Scholar] [CrossRef]















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grid Size | Theodorsen | Compact | Error% | Second-Order | Error% | |
|---|---|---|---|---|---|---|
| 2.52 | 2.56 | 1.53 | 2.70123 | 6.94 | ||
| 8512.51 | 8203.12 | N/A | 8310.09 | N/A | ||
| 4766.88 | 4832.91 | 1.38 | 5079.71 | 6.56 | ||
| 9736.31 | 9389.13 | N/A | 9512.99 | N/A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Allahyari, M.; Esfahanian, V.; Yousefi, K. The Effects of Grid Accuracy on Flow Simulations: A Numerical Assessment. Fluids 2020, 5, 110. https://doi.org/10.3390/fluids5030110
Allahyari M, Esfahanian V, Yousefi K. The Effects of Grid Accuracy on Flow Simulations: A Numerical Assessment. Fluids. 2020; 5(3):110. https://doi.org/10.3390/fluids5030110
Chicago/Turabian StyleAllahyari, Majid, Vahid Esfahanian, and Kianoosh Yousefi. 2020. "The Effects of Grid Accuracy on Flow Simulations: A Numerical Assessment" Fluids 5, no. 3: 110. https://doi.org/10.3390/fluids5030110
APA StyleAllahyari, M., Esfahanian, V., & Yousefi, K. (2020). The Effects of Grid Accuracy on Flow Simulations: A Numerical Assessment. Fluids, 5(3), 110. https://doi.org/10.3390/fluids5030110