1. Introduction
Since the last twenty years, Computational Fluid Dynamics (CFD) has played an important role in the early design stages of modern-day vehicles. In practice, Reynolds-Averaged Navier–Stokes (RANS) modeling still remains a widely-used approach in automotive applications of CFD, due to its acceptable accuracy, affordable cost, and fast turnaround time. However, due to the well-known drawbacks of RANS models in predicting complex separated flows, variants of the hybrid Detached Eddy Simulation (DES) approach are seen to gain popularity currently in many automotive applications. As demonstrated by many researchers [
1,
2,
3], DES models generally offer an advantage over RANS models in better predicting the flow field and integral aerodynamic quantities like drag, lift, and moment coefficients. However, in spite of showing a superior flow prediction capability than the RANS approach, DES still cannot fully correctly capture the flow details. Additionally, the DES approach is still cost prohibitive for many applications; for example, for the recently developed DrivAer vehicle, the DES simulation is 17-times more expensive than the RANS computations [
2]. In present day high-fidelity CFD analyses, simulations with 120 million cells are very common; even a RANS-based well-converged simulation of this size takes more 3000 core-hours for completion (see [
4]), implying that a DES would have taken more than 50,000 core-hours for a single case. This makes the use DES analysis impractical for motorsports applications for sure and may be for the passenger vehicle industries as well. Subsequently, RANS approaches still remain a popular method in situations like the early design cycle of a new vehicle model where hundreds of design options need to be assessed.
In RANS approaches, the entire turbulence spectrum is approximated through a set of transport equations to solve the time-averaged mean flow field. These equations were established during the past several decades based on empiricism, mathematical analysis, and physical reasoning of the key mechanisms observed in canonical flows. RANS models have enjoyed remarkable success in various industrial applications. However, the inability of RANS models to predict complex separated flows correctly has motivated researchers to develop and apply higher order models in industrial applications. One promising model is the DES approach. DES is a hybrid modeling approach that combines the best of both RANS and LES: an RANS simulation in the viscosity-dominated boundary layers and an LES in the unsteady separated regions.
However, one major problem of the DES approach is how to deal with the spurious buffer layer between the RANS and Large Eddy Simulation (LES) regions [
5,
6]. Spalart et al. [
7] proposed the Delayed Detached Eddy Simulation (DDES) to prevent DES from a too early switch to LES mode. Another modification is called the Improved Delayed Detached Eddy Simulation (IDDES), proposed by Shur et al. [
8]. IDDES allows RANS to be used in a much thinner near-wall region and could provide the so-called Wall-Modeled LES (WMLES) capabilities to the DES formulation.
The existing literature contains a vast body of works on the evaluation of RANS and DES models for various flow configurations. Due to the scope of this study, only a few notable validation studies related to automotive flows will be discussed in this paper.
Due to the complexity and proprietary nature of the works associated with production passenger vehicles, the evaluations of turbulence models on full-scale vehicles are rare. Instead, researchers have mainly focused on simplified, generic car geometries, such as the Ahmed body [
9] and the more recently introduced DrivAer models [
10]. The Ahmed body was introduced in 1984 to analyze the key flow field features of ground vehicles [
9]. The Ahmed body features a flat front with rounded corners and a sharp slanted rear upper surface with various angles. Since ground vehicles can be viewed as bluff bodies moving in close vicinity to the road, broad aerodynamic features of the Ahmed body resemble a ground vehicle, e.g., the flow separation on the rear window or the wake structure behind the body. The Ahmed body has been extensively studied by using both experimental and numerical methods. Until recently, it has been the most widely-used object for evaluation works on turbulence models related to automotive flows.
The main model variable for the Ahmed body geometry is the rear slant angle. The flow patterns on the rear slant and behind the body vary as the slant angle changes. Existing literature contains a vast amount of works that investigated the influence of the slant angle on the flow patterns. It was first shown by Ahmed et al. [
9] in their introductory work on the Ahmed body that 30 degrees is the critical slant angle at which the topology of the flow is suddenly altered and the drag is reduced noticeably. Above this angle, the flow fully separates over the slant starting from its sharp edge due to the strong adverse pressure gradient between the slant and the roof. For such configurations, RANS models succeed in predicting the correct separation region, which agreed well with experimental data [
2]. Below this critical angle, especially at 25 degrees, the flow is most complex. The flow still separates from the slant; however, the pressure gradient between the slant area and the side walls is still strong enough, which generates streamwise counter-rotating vortices at the lateral slant edges. These vortices induce a downward motion over the slant, mainly in the downstream part of the slant. Consequently, the flow that was partially detached from the upstream part of the slant can reattach further downstream, forming a confined recirculation zone over the rear slant. Moreover, the wake structures, which are dominated by the interactions between the separation zone and strong counter-rotating vortices, become very complex in this configuration. These vortices are also responsible for the high induced drag. Subsequently, the 25 degree slant angle model has become the most extensively studied variant of the Ahmed body geometry as it poses a significant challenge for CFD analyses. As demonstrated by [
11,
12,
13,
14], the majority of RANS models fail to predict the flow field past this 25 degree model correctly. These simulations either predict no separation or they cannot predict the correct size of the separation zone. Not only for RANS, the CFD simulation of the 25 degree Ahmed model is also challenging for the higher fidelity models, such as LES and hybrid LES/RANS [
15]. For very small slant angles, i.e., smaller than 12 degrees, the flow is fully attached on the rear slant and only separates over the rear end of the body. For such simple flow patterns, most RANS models again perform very well in terms of both integrated quantities and flow structures [
16]. To sum up, for the Ahmed car body, the performance of various turbulence models, especially RANS models, is highly influenced by the geometry and flow topology present. This raises the potential uncertainty in predicting automotive flows when using numerical approaches, especially RANS approaches.
A new realistic generic car model, called the DrivAer model, was proposed recently by the Institute of Aerodynamics and Fluid Mechanics of the Technical University of Munich (TUM), in cooperation with BMW and Audi AG. The DrivAer model is available in three typical car configurations, i.e., estate, fastback, and notchback. All three of these configurations have been experimentally investigated to provide data for numerical comparisons [
10,
17]. TUM researchers also investigated the fastback configuration numerically using the SST
turbulence model [
18]. These studies found that although there are good agreements for drag coefficients between the experiment and simulation, observable discrepancies in pressure distributions on the top and bottom of the car exist between the CFD simulation and experiment results. A recent work by Peters et al. [
19], which presented higher order structured finite difference solutions using overset grids and NASA’s overset grid solver Overflow, also observed similar pressure distribution differences when using the SST
model. Moreover, several widely-used RANS and hybrid LES/RANS models were also applied to the DrivAer model [
1,
2,
20,
21]. It was found that RANS models were unable to predict the force coefficients correctly, especially the lift coefficient. In addition, these studies indicated that, while inaccuracies still exist when compared to the experimental data, hybrid approaches predict both force coefficients and flow fields with better experimental correlations, but at the expense of much higher computational cost.
However, the evaluations of turbulence models on full-car geometries are quite rare. A recent work presented a study of RANS turbulence models on the prediction of aerodynamic characteristics of a NASCAR Gen-6 Cup race car [
22]; this work showed that discernible differences in the predicted flow features, especially in the wake region, exist between the results from different RANS models. In this backdrop, the goal of the current study is to provide an evaluation of several RANS and DES approaches on a full-scale passenger vehicle. The RANS models investigated are the ones that are commonly used in various industrial external flow applications, i.e., the realizable
two-layer, Abe–Kondoh–Nagano (AKN)
low-Reynolds, SST
, and V2F models; further details about these models will be provided in the proceeding sections. The DES variants studied are the DDES and IDDES approaches. The prediction differences between these turbulence models were analyzed for two vehicle configurations in terms of integral aerodynamic forces, pressure, and velocity fields.
3. Results and Discussions
All the simulations were run on a cluster with 96 computing cores. These simulations were run until the flow reached an acceptable convergence judged by two criteria. Firstly, the normalized residuals of all transported quantities were steady, and secondly, the drag force coefficient, averaged over last 500 iterations and 0.4 s (3 flow units) for RANS and DES, respectively, did not show fluctuations over three counts. Based on these two stopping criteria, the RANS and DES models took around 28 and 250 h, respectively, to be completed. The DES simulations were run with a Courant-Friedrichs-Lewy or CFL number of one for a period, T, of 15 convective flow units (, where L is the car length and U is the freestream velocity). The CFL number, C, is defined as, , where is the local cell velocity, and and are local grid and time resolutions (time step), respectively. In order to have a comprehensive understanding of the predictive differences between the six models, the proceeding discussions will cover analyses of force coefficients, velocity, pressure field, wake structures, and some other flow fields that are crucial to the flow features.
A mesh independence study was conducted first for the baseline case with the RKE and IDDES models to further eliminate the effects of the mesh on simulation results. For the RKE model, the fine mesh contained 100 million cells, which were generated by reducing the base size from 24 mm to 20 mm. A change of drag coefficient within 1% between 75 and 100 million cells was achieved in this process. However, for the IDDES model, simply reducing the base size will increase the computational cost dramatically, not only due to the increased cell number, but also due to the smaller time step resulting from reducing the core mesh size close to the vehicle. Thus, a different strategy, where only the cells in the wake region and underbody area were halved, was used to refine the mesh for the IDDES model. As suggested by [
43], the recommended mesh size in the detached flow regions for a DES-type simulation should be close to the Taylor microscale given by
, where
A is an undetermined constant set to be 0.5,
l is the bulk integral scale (taken as the vehicle length,
L), and
the integral scale Reynolds number (here taken as the Reynolds number based on the free-stream velocity and vehicle overall length
L). For the Reynolds number used in this study, the Taylor microscale
was estimated to be 7.9 mm. Therefore, the mesh strategy used to refine the IDDES case with a mesh size of 6 mm in the wake region and underbody was reasonably fine enough. The fine mesh of the IDDES model (shortened to IDDES fine in this study) contained 87 million cells by using this strategy. Further to eliminate the numerical uncertainty, the IDDES fine case was run with a CFL number of 0.5. It was found that the change of drag coefficient was within 1%; thus, the coarser mesh with a CFL number of one is sufficient enough for performing the intended investigations.
3.1. Drag and Lift Forces
Due to the proprietary nature of the data, the drag coefficient values presented in this paper were normalized using an arbitrary reference area, such that the baseline car
obtained from the RKE model matched with the one available in the public domain. Data downloaded from the website Edmunds.com,“features & specs 2014 Hyundai Veloster”,
https://www.edmunds.com/hyundai/veloster/2014/features-specs/, accessed 19 June 2017, indicates that the drag coefficient of the 2014 model Hyundai Veloster is 0.320. Thus, the
for the baseline case obtained from the RKE model was set to 0.320, and the predictions from all other approaches were nominalized accordingly.
Table 1 shows the percent deviation of the predicted
values from the wind-tunnel test data for all investigated models; the data presented in this table correspond to the baseline vehicle model. Firstly, it can be seen that
prediction from the RKE agreed very well with the experimental data. However, all other models predicted significantly higher drag coefficient, with the highest
value coming from the AKN model. Unfortunately, while both the DDES and IDDES models, which apply the RANS SST model in the boundary layers, predicted a slightly better drag coefficient compared with that of the SST model, they failed to predict well-correlated
values. Furthermore, for the DES models, while the
prediction of the IDDES was slightly better than that of the DDES, the IDDES model with a fine mesh produced negligible improvement. The fact that even the IDDES fine case failed to predict well correlated
values indicates the monumental challenge that is still encountered by the CFD simulation of automotive flows. Although the RKE model predicted a significantly better
value than all other investigated models, it should be cautioned that this does not suggest the superior performance of the RKE model. For the RANS and DES models, the drag prediction may contain error cancellation of flow fields in different regions around the vehicle.
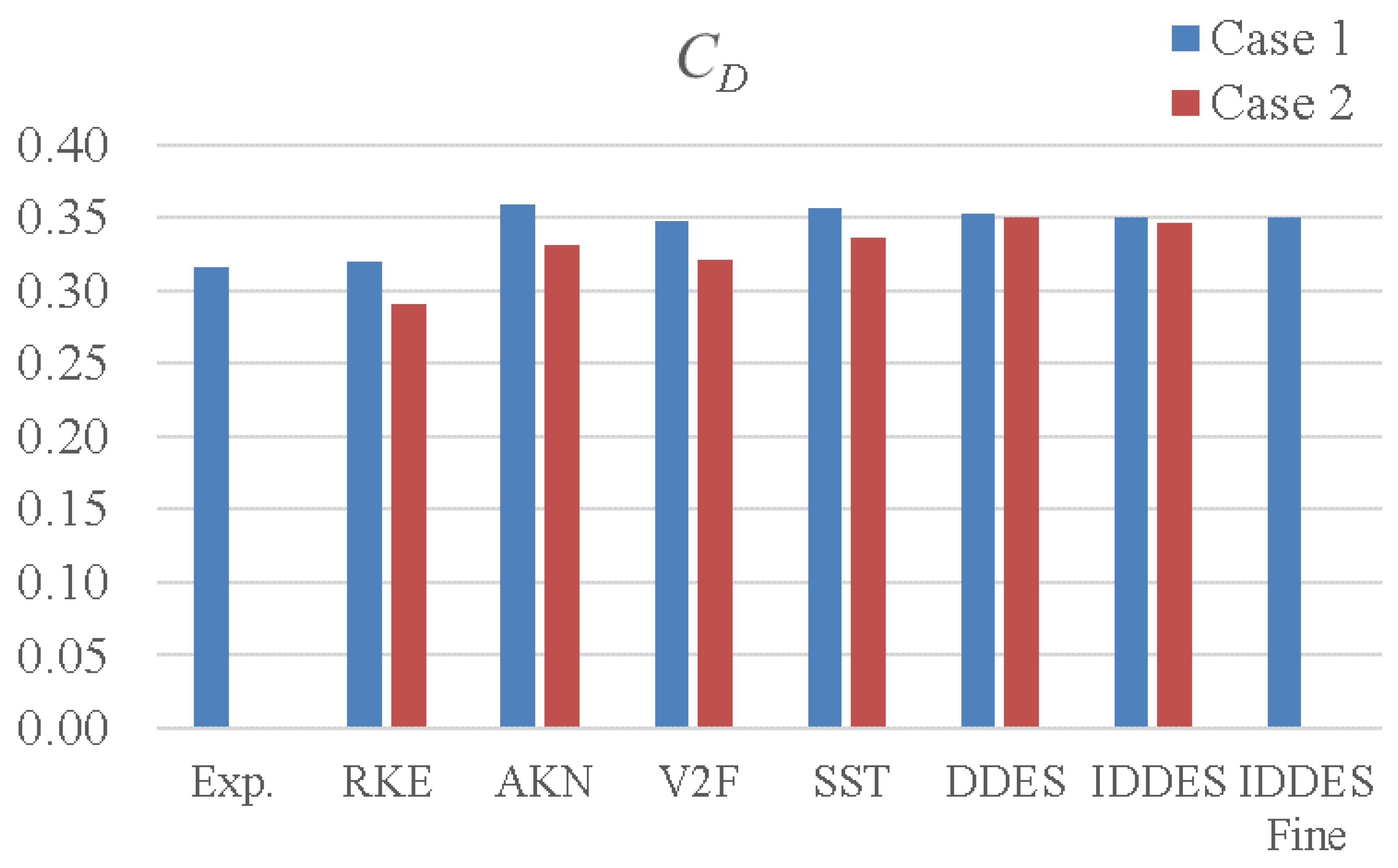
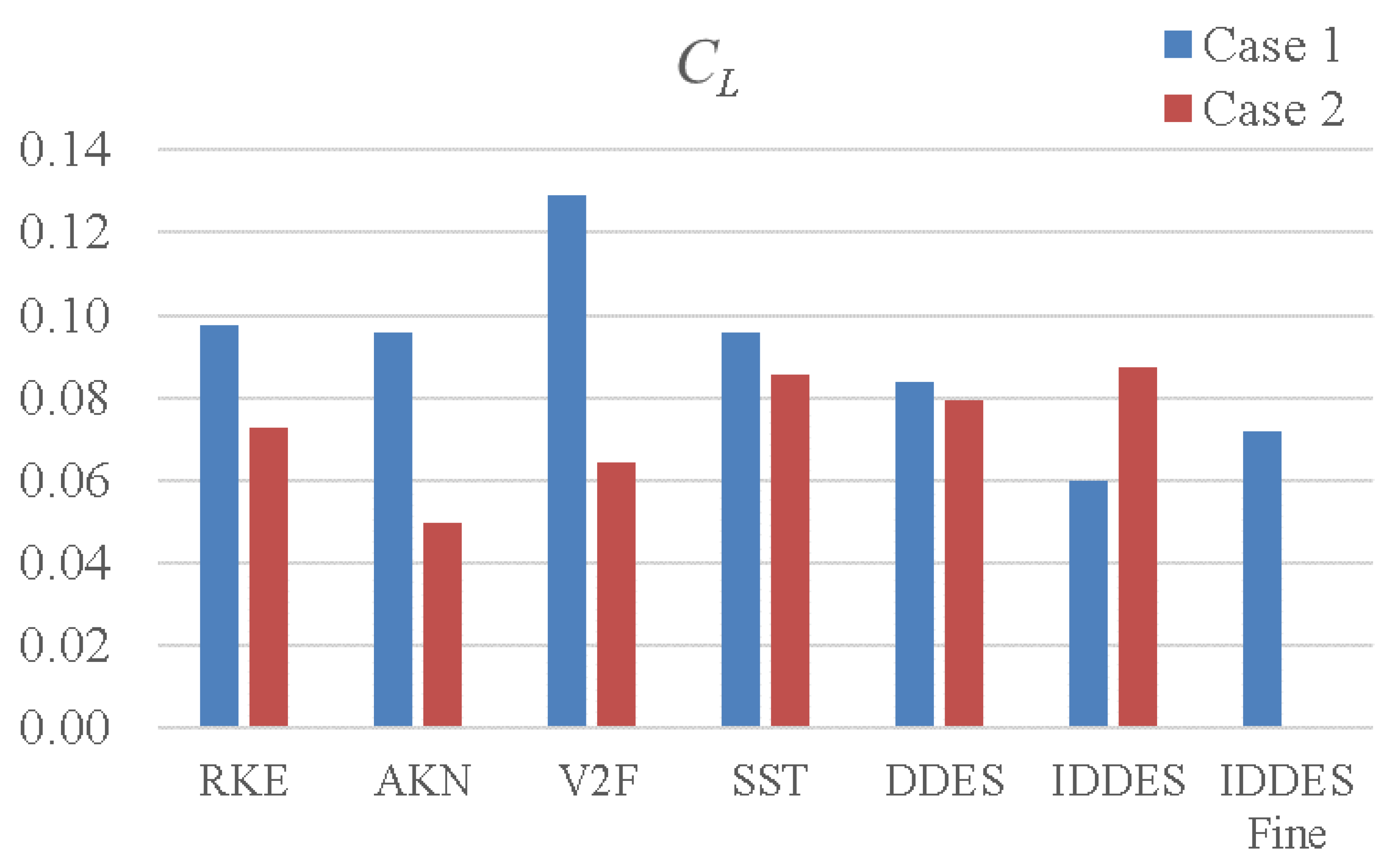
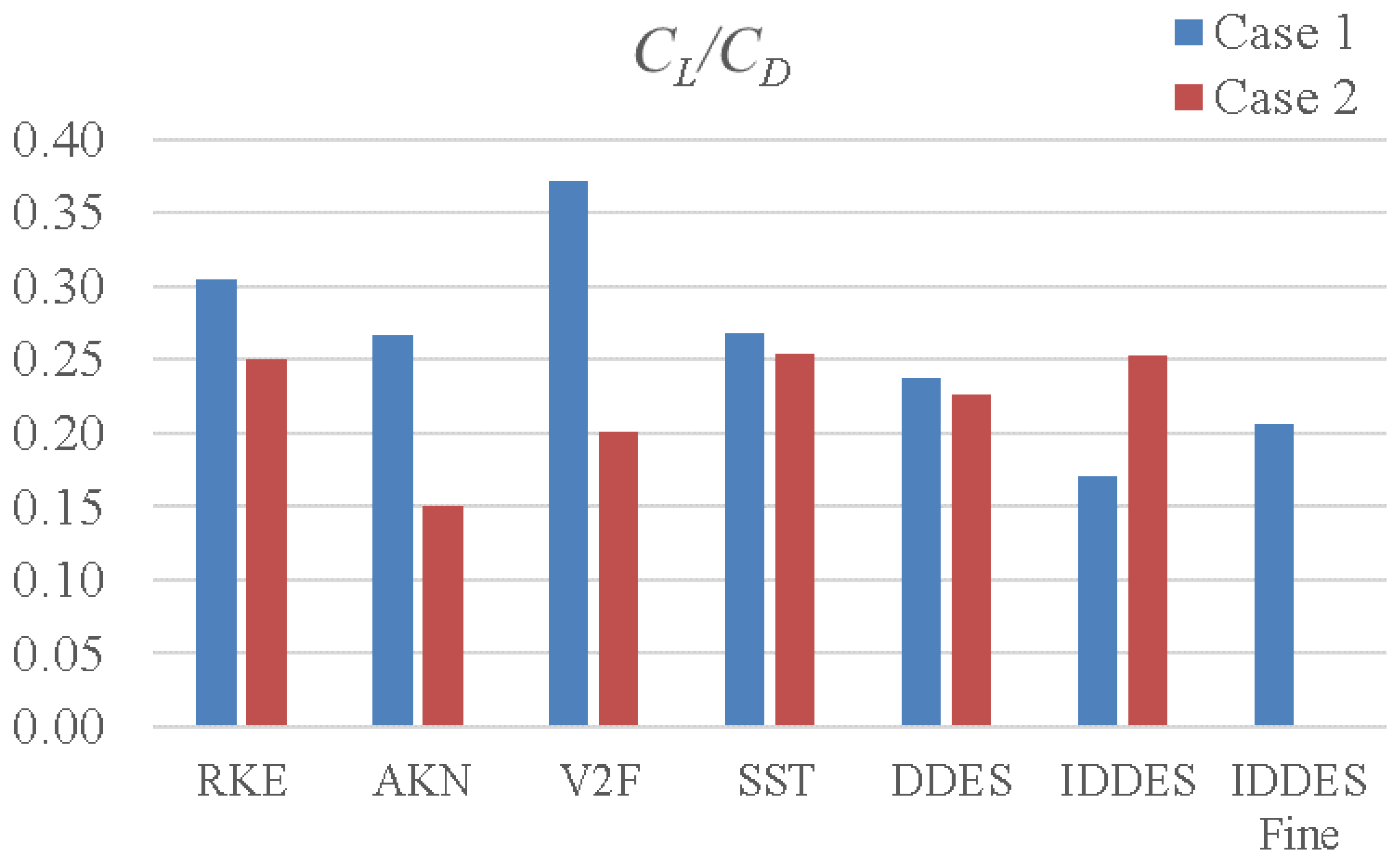
Table 2 summarizes drag and lift coefficients corresponding to both vehicle configurations as obtained from the studied turbulence models. These include the coefficients of drag, total lift, front and rear lift, and the front to total lift ratio, known as the lift balance or percent front. Data presented in
Table 2 are graphically summarized in
Figure 7,
Figure 8 and
Figure 9 to illustrate the predictive differences between all models in terms of drag, lift, and percent front. It can be seen that the RKE model predicted significantly smaller
values for both cases compared to the other models. For instance, the RKE predicted a 11.1% less
value than the AKN for Case 1 and a 17.1% smaller
value than the DDES model for Case 2. Moreover, while all models predicted a higher
value for the baseline case than that for the air-duct case, compared to the RANS predictions, the two DES variants predicted a much smaller difference between the two cases; see
Table 3. For instance, while the IDDES predicted a
of three counts between the two car configurations, the RKE model predicted a 30 count difference. While the variation of
predictions between the RANS was within
counts, the spread of
predictions was much larger; note that, for any force coefficient
,
is defined as the
value from Case 1 minus the corresponding value from Case 2. Clearly, the predictive disagreements between the RANS models were most visible with the front lift ratio. Further, comparing the two IDDES simulations with different mesh strategies for the baseline case, while there was no difference in
prediction, a noticeable discrepancy can be seen in
prediction. In short, for all the turbulence models and mesh strategies studied, the prediction of drag was more consistent than that of lift. Moreover, even for industrial automotive flows that feature complex geometry and exhibit massive separations, a certain model could predict the
value that correlates very well with the experimental data.
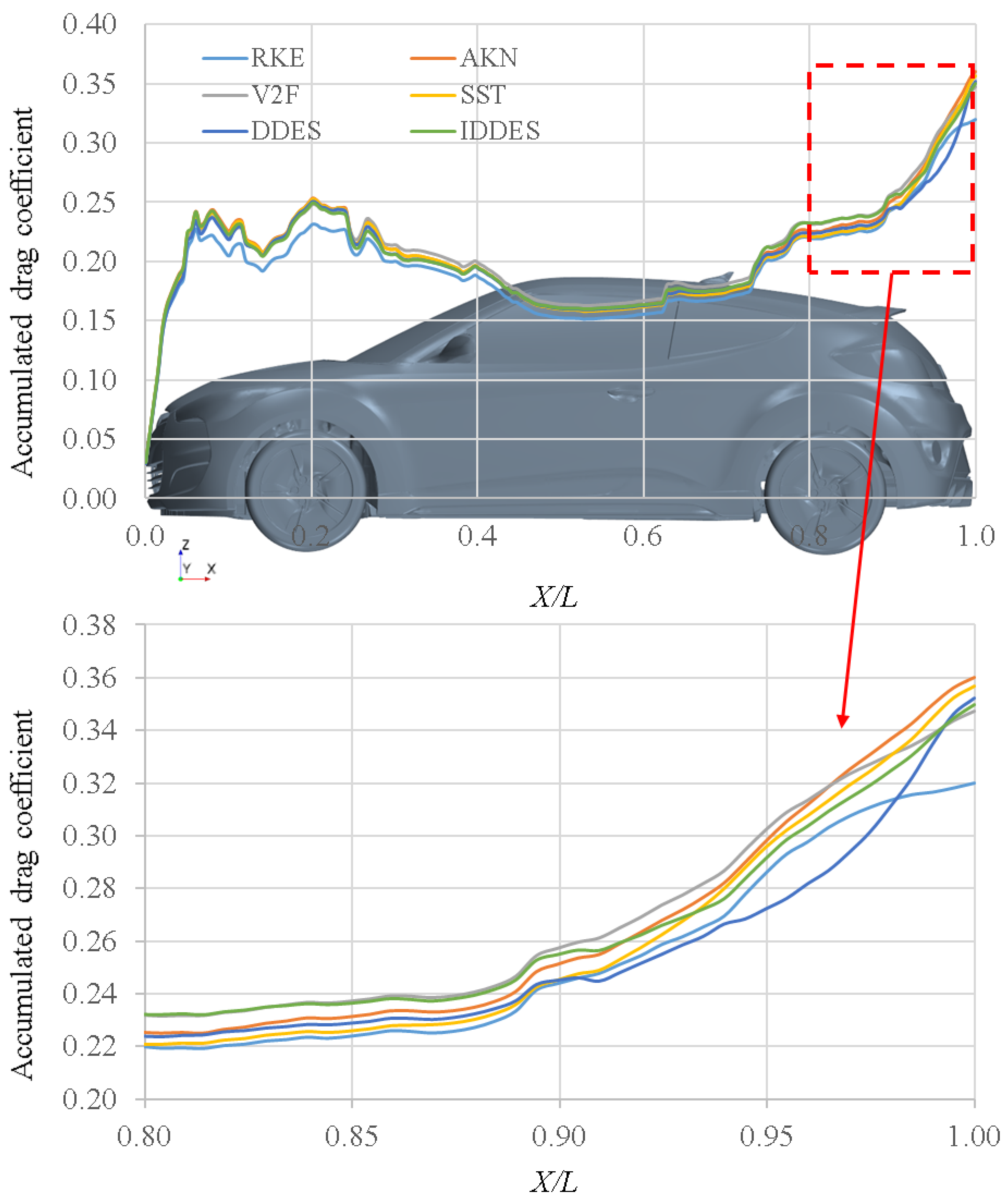
The accumulated drag coefficients along the vehicle centerline for the baseline case as obtained from all turbulence models are shown in
Figure 10. It can be seen, firstly, that before the airflow passed through the CRFM (
), all the models predicted almost identical results; then, in the underhood region from the CRFM to the cowl area (
), the RKE predicted a significantly lower drag value compared to all other models. Nevertheless, the results from the RKE in this region still followed the same trend as all other models. Further, all the models predicted almost identical trends, though with different magnitudes, in the region between the cowl area and the rear spoiler where the flow was mostly attached (
). However, at the rear end of the vehicle, the predictions from all the models started to diverge from each other significantly, especially that of the DDES and the RKE. In short, for the vehicle model used in this study, all the turbulence models investigated could predict consistent results even in the underhood compartment where the flow was featured with separations and complex interactions between the cooling airflow and underbody airflow. However, no consistent results between all the models were observed for the prediction of the wake region where massive separation occurred.
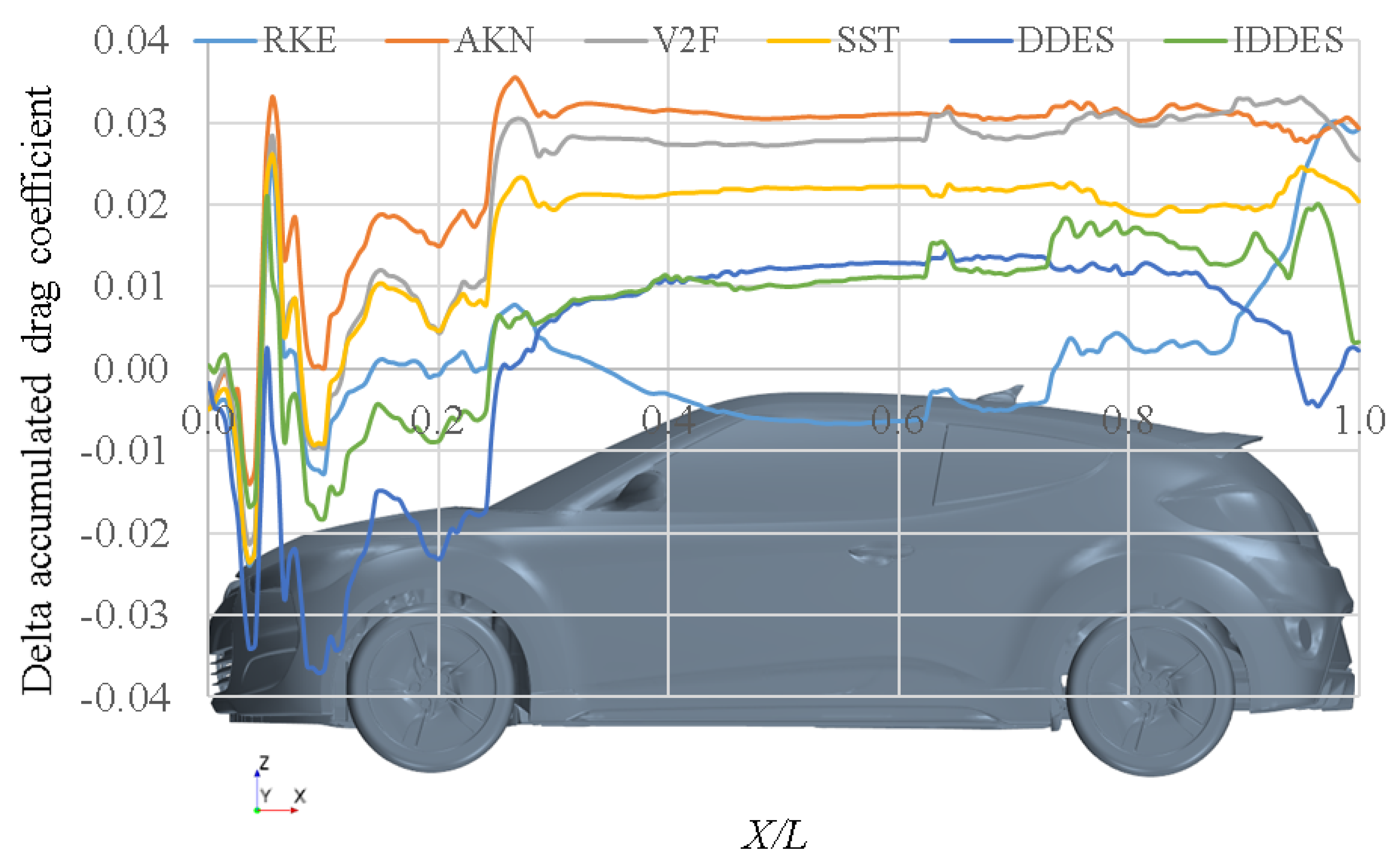
The delta accumulated drag coefficients (between Case 1 and Case 2 vehicle configurations) obtained using all turbulence models are shown in
Figure 11. Firstly, it is not surprising to observe significant prediction fluctuations in the front part of the vehicle since the only difference between the two vehicle configurations was the front end geometry. For this part of the vehicle, although all turbulence models predicted similar trends, noticeable differences in magnitude indicated a high sensitivity of the
prediction to the choice of turbulence models. Further, the noticeable fluctuations in the rear end of the vehicle, especially for the RKE, DDES, and IDDES models, highlighted the strong influence of the predictions of upstream flow on the downstream flow. Moreover, the prediction trend of the RKE model differed significantly from all other models in two areas: the windshield and the rear end. The causes of prediction differences will be qualitatively and quantitatively analyzed in the following sections.
3.2. Pressure and Velocity Fields
3.2.1. Baseline Case
As stated in the previous section, the front and rear ends of the vehicle contributed most to the difference for all the turbulence models studied. To better analyze the prediction differences for all the models, pressure and velocity fields at the front and rear ends of the vehicle were investigated.
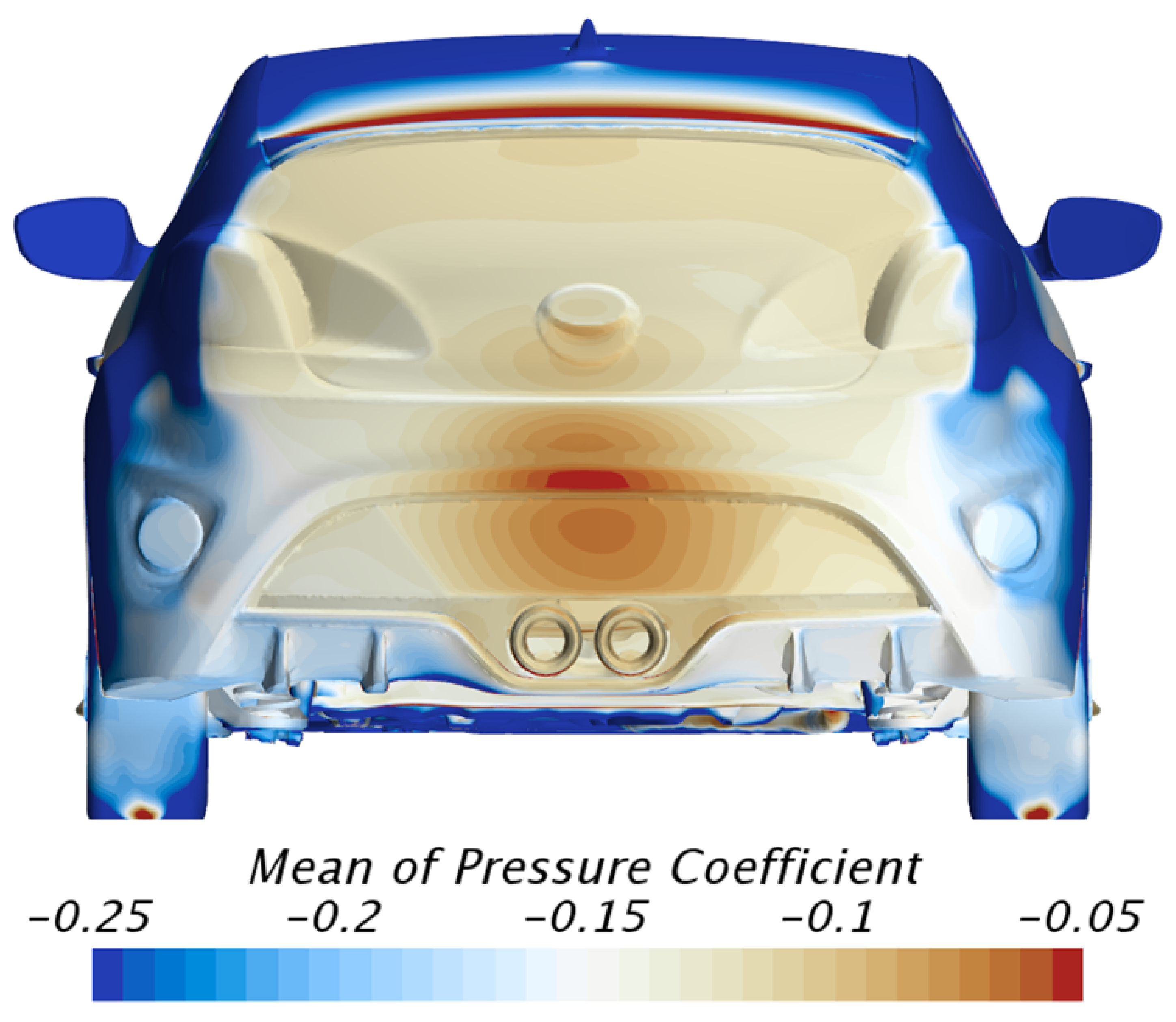
For the baseline case, since the RKE predicted a significantly lower
value, the pressure coefficient on the back of the vehicle from this model is shown first in
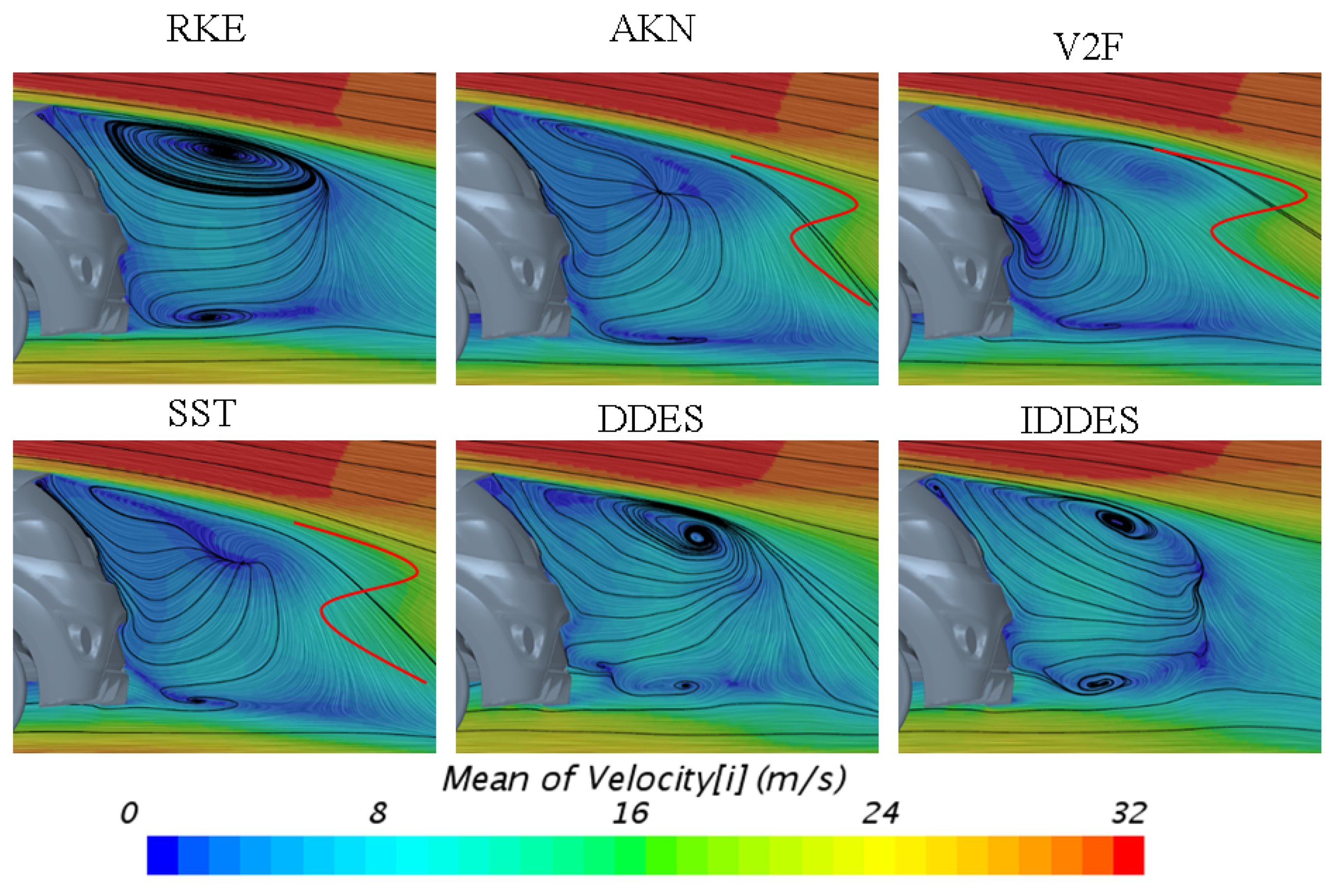
Figure 12. It can be seen that the most noticeable higher pressure area was right above the exhaust pipe. This area was the saddle of attachment of the wake flow as supported by the streamline structure in
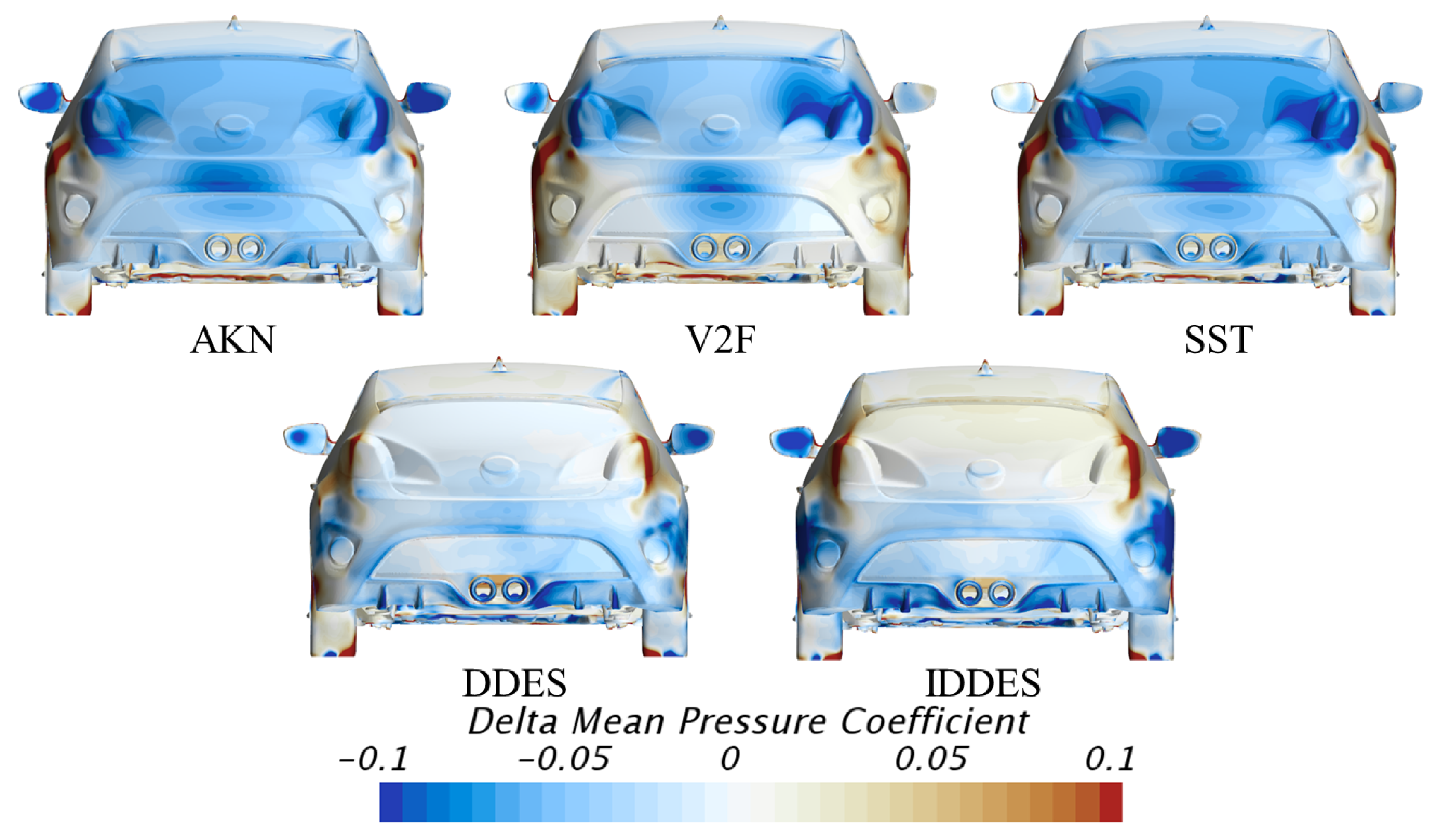
Figure 13 for the RKE model (Top left). To better illustrate the differences between the RKE and other models for the baseline case flow prediction, contours of
, where
represents
from a model relative to
obtained from the RKE, are shown in
Figure 14. Firstly, all other models predicted overall lower pressure when compared with that of the RKE, especially the three RANS models. This is consistent with the results of accumulated drag as shown in
Figure 10. More specifically, the
predicted by the AKN model might be explained by the key differences between the RKE and the AKN model on how these two models solve the viscosity-dominated near-wall flow regions. The RKE model used a two-layer approach (the Star-CCM+ implementation of this approach was after [
34]), and the AKN model adopted a low-Reynolds number approach with the introduction of the Kolmogorov velocity scale, instead of the friction velocity, to account for the near-wall and low-Reynolds number effects in both attached and detached flow. On the other hand, both of V2F and SST models can resolve down to the viscosity-dominated near-wall regions. Thus, more evident prediction differences in certain areas, such as the area around the right taillight and both sides of the vehicle, are expected. Further, the delta pressure distributions predicted by the two DES variants showed a completely different pattern compared to those from the other three RANS models. Interestingly, they both predicted less discrepancies against that of the RKE model, with slightly higher pressure on the upper part, but lower pressure on the lower part.
The vector scenes with constrained streamlines presented insights into the wake structure, as demonstrated in
Figure 13. Firstly, the RKE model predicted two strong counter-rotating vortices with the saddle-like attachment area right above the exhaust pipes (see
Figure 12). Secondly, compared to the RKE model, the other three RANS models predicted significantly different wake structures: (1) no counter-rotating vortices existed; (2) the lower vortex was much weaker and the saddle of attachment area at a lower location; (3) the wake area was much smaller (see the areas on the right of the red spline line in the corresponding images). On the other hand, again interestingly, two DES variants predicted a mostly similar wake structure as that of the RKE model, e.g., counter-rotating vortices, saddle of attachment location, and similar wake area. However, some differences can still be observed: (1) the top vortex core was at a further downstream location; (2) wake structures were more complex, especially as the DDES predicted a tertiary vortex near the exhaust pipes, and the IDDES predicted a tertiary vortex under the spoiler.
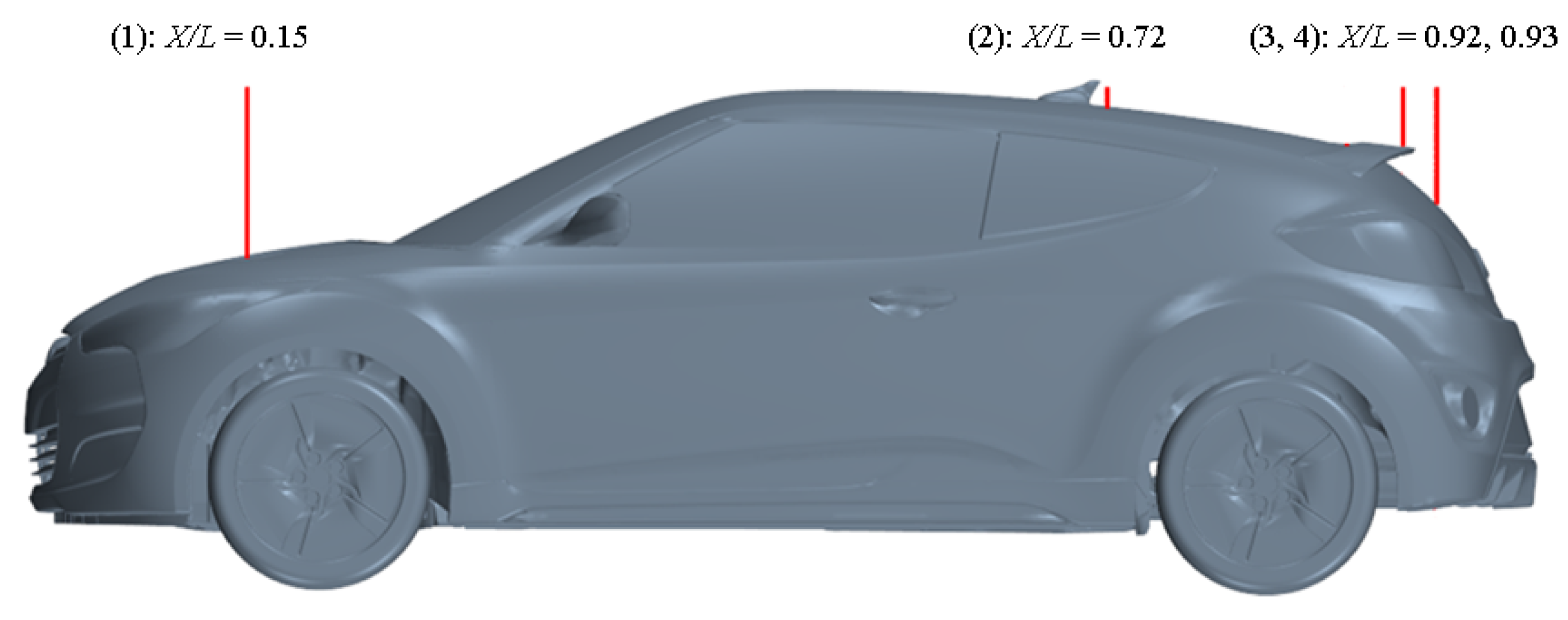
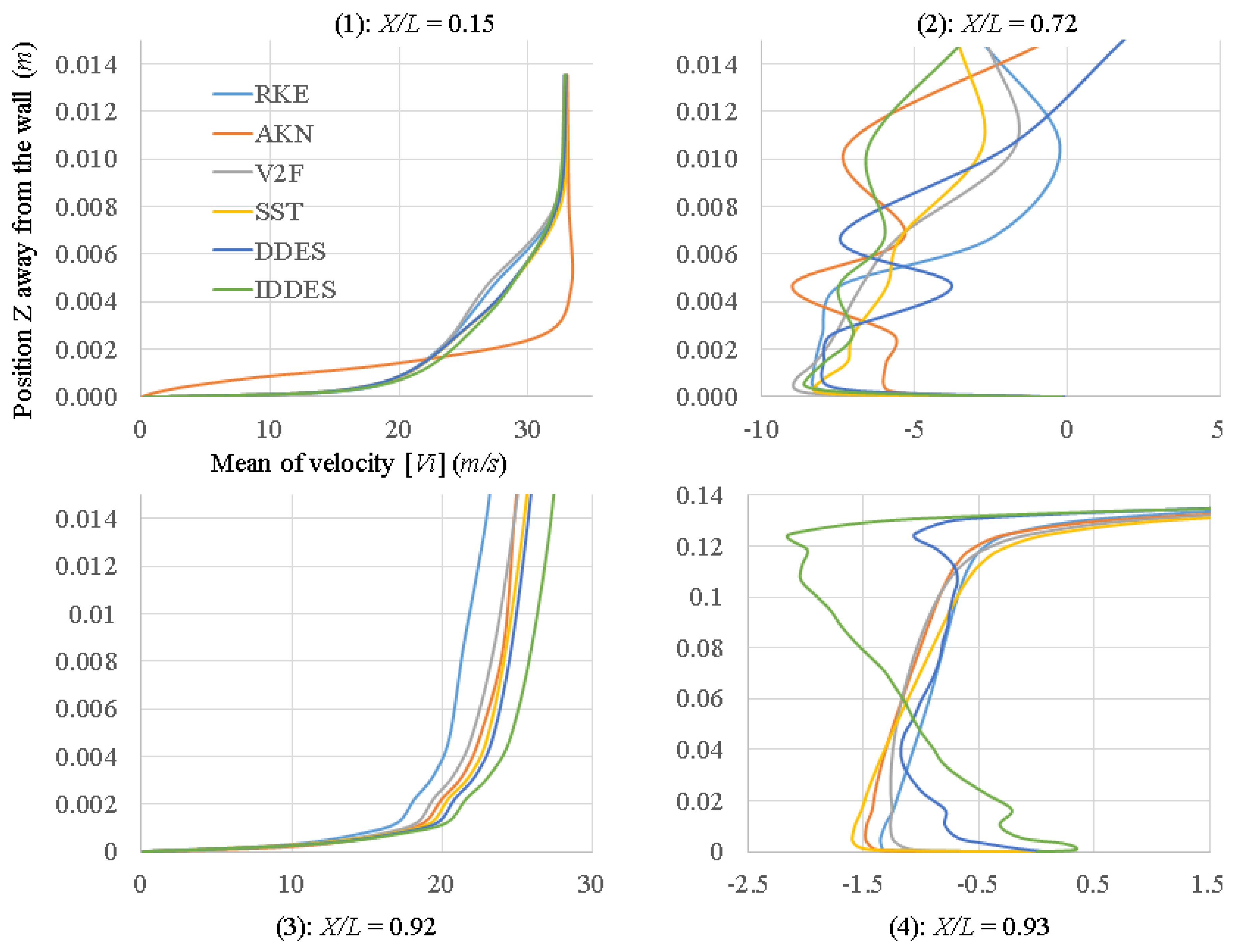
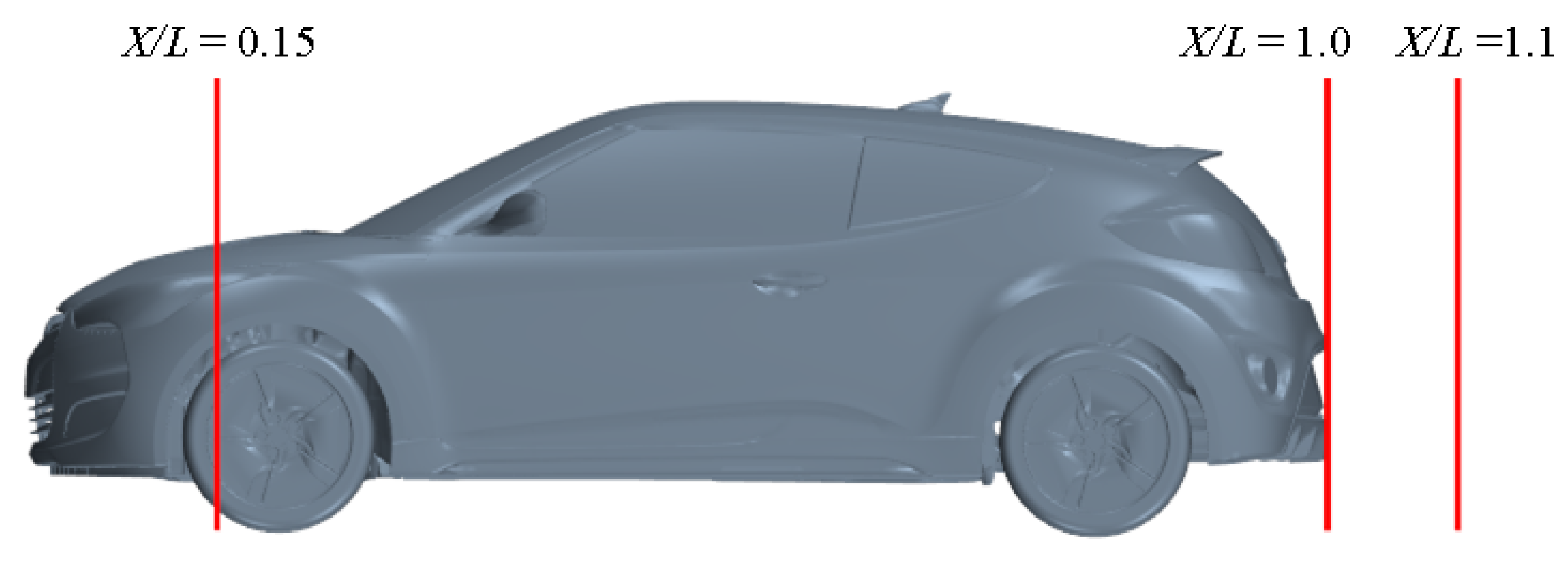
To further investigate the prediction differences between all the models studied, streamwise velocity profiles for the baseline case are shown at four selected locations. These lines are marked with red lines in
Figure 15 and are located (1) on the hood, (2) behind the antenna, (3) on the rear end of the spoiler, and (4) on the rear glass. The velocity profiles are shown in
Figure 16. It can be seen that, for Locations 1 and 3, where the flow was attached, similar trends can be observed in the predictions from all models except for the AKN model at Location 1 on the hood. At Location 3, right on the rear end of the spoiler, where the flow was mostly attached and fully turbulent, all the models showed similar predictions in the viscosity-dominated near-wall region. This implies that the wall treatments used by different models worked rather well in the attached flow region. However, above the viscosity-dominated region, the models studied start to show differences in terms of boundary layer growth. Clearly, the RKE showed the smallest boundary layer thickness, and the IDDES predicted the thickest boundary layer at Location 3. The unexpected streamwise velocity profile from the AKN at Location 1 looked quite suspicious, and indicated that the low-Reynolds number approach implemented in the AKN model may not work well even in the attached flow region. On the other hand, for Locations 2 and 4, which were in wake regions, all models studied differed from each other significantly. In short, for the models studied, while a consistent streamwise velocity profile could be observed in attached flow regions except for the AKN model, the significant different predictions of the streamwise velocity in the wake regions further showed a strong dependence of the turbulence models on the prediction of complex automotive flows.
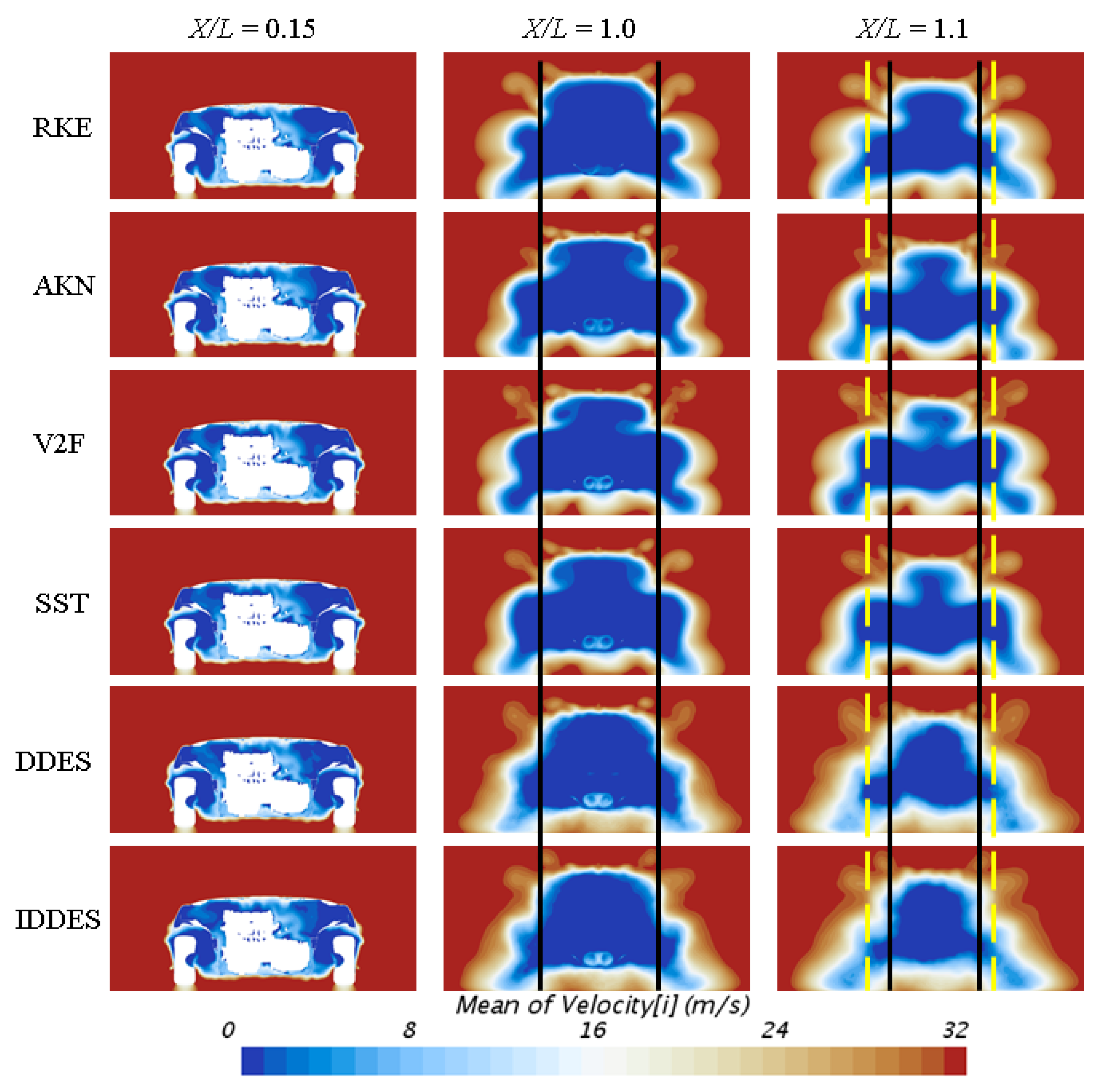
For the sake of a more comprehensive analysis of the flow fields, three plane sections were selected for flow visualizations. As shown in
Figure 17, these planes are: (1) through the underhood area; (2) at the rear of the vehicle; (3) inside the wake region. Streamwise velocity scenes on these three selected plane sections from all models for the baseline case are shown in
Figure 18. It can be seen that, on Plane 1 at
, all models predicted a similar streamwise velocity distribution. However, compared to the other three RANS models, the RKE model predicted a larger negative streamwise velocity area in the upper part of the wake region on planes
1.0 1.1 (see the area bound by the black lines). Moreover, the RKE model predicted a smaller negative streamwise velocity area in the lower part of the wake region on plane
(see the yellow dashed lines). Surprisingly, the predictions from the two DES variants were quite similar to that of the RKE model on both selected planes. The similarity of the streamwise velocity profile on these two planes between the predictions from the DES variants and the RKE model supports that the RKE model performed better than the other three RANS models for the baseline case. This can be further confirmed by the delta streamwise velocity against the IDDES fine model on these planes, as shown in
Figure 19. It can be seen that the RKE predicted closer velocity profiles in the wake region to that of the IDDES fine model than the other three RANS models. Moreover, the IDDES case with the coarse mesh predicted very similar results as that from the fine mesh, which indicates that the coarse mesh was sufficient enough for this study.
3.2.2. Comparison between the Baseline Case and the Air-Duct Case
This section presents analyses of how the selected turbulence models predicted the flow differences between two car configurations. This was done by presenting delta values of pressure and velocity; delta pressure or velocity means the quantity for Case 2 (the air-duct case) subtracted from that of Case 1 (the baseline case).
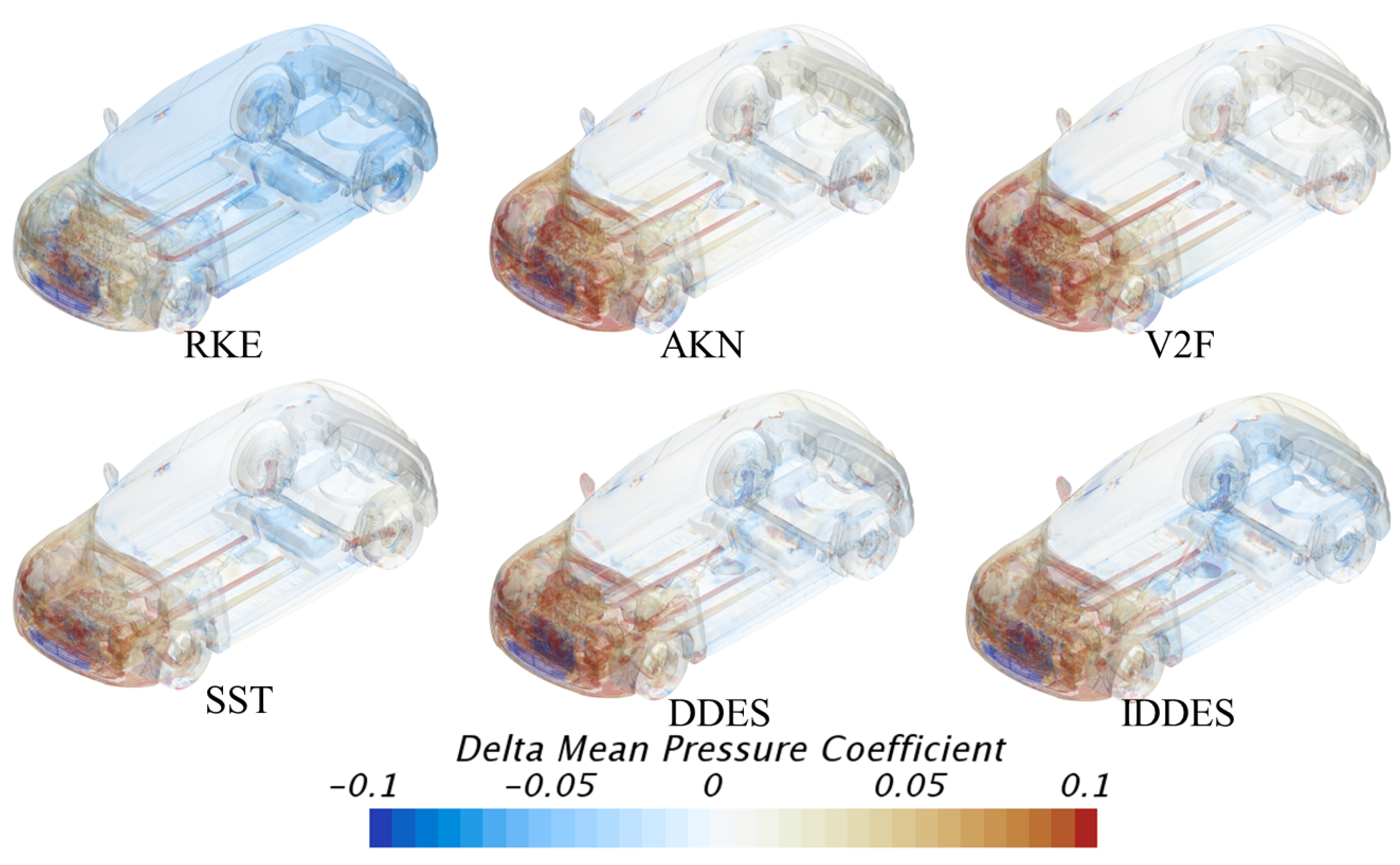
Scenes of delta pressure coefficient (
of Case 2 relative to the baseline Case 1), as obtained from the selected models, are shown in
Figure 20. Firstly, as expected, all the models predicted a higher pressure coefficient in the front end part of the vehicle for the baseline case, since the larger front grille opening in the baseline configuration will result in more airflow entering the underhood compartment. However, noticeable differences can be observed for the pressure distribution predictions on the rest of the car. In particular, the prediction from the RKE model differed significantly from that of all other models; the RKE model predicted noticeable lower pressure on the rest of the car. This is consistent with the delta accumulated drag plot discussed earlier in
Figure 11. Further, the two DES variants predicted lower pressure on the rear bottom part of the vehicle. These observations indicate that the change of upstream geometry may result in noticeably different downstream predictions of the flow field depending on the choice of turbulence models.
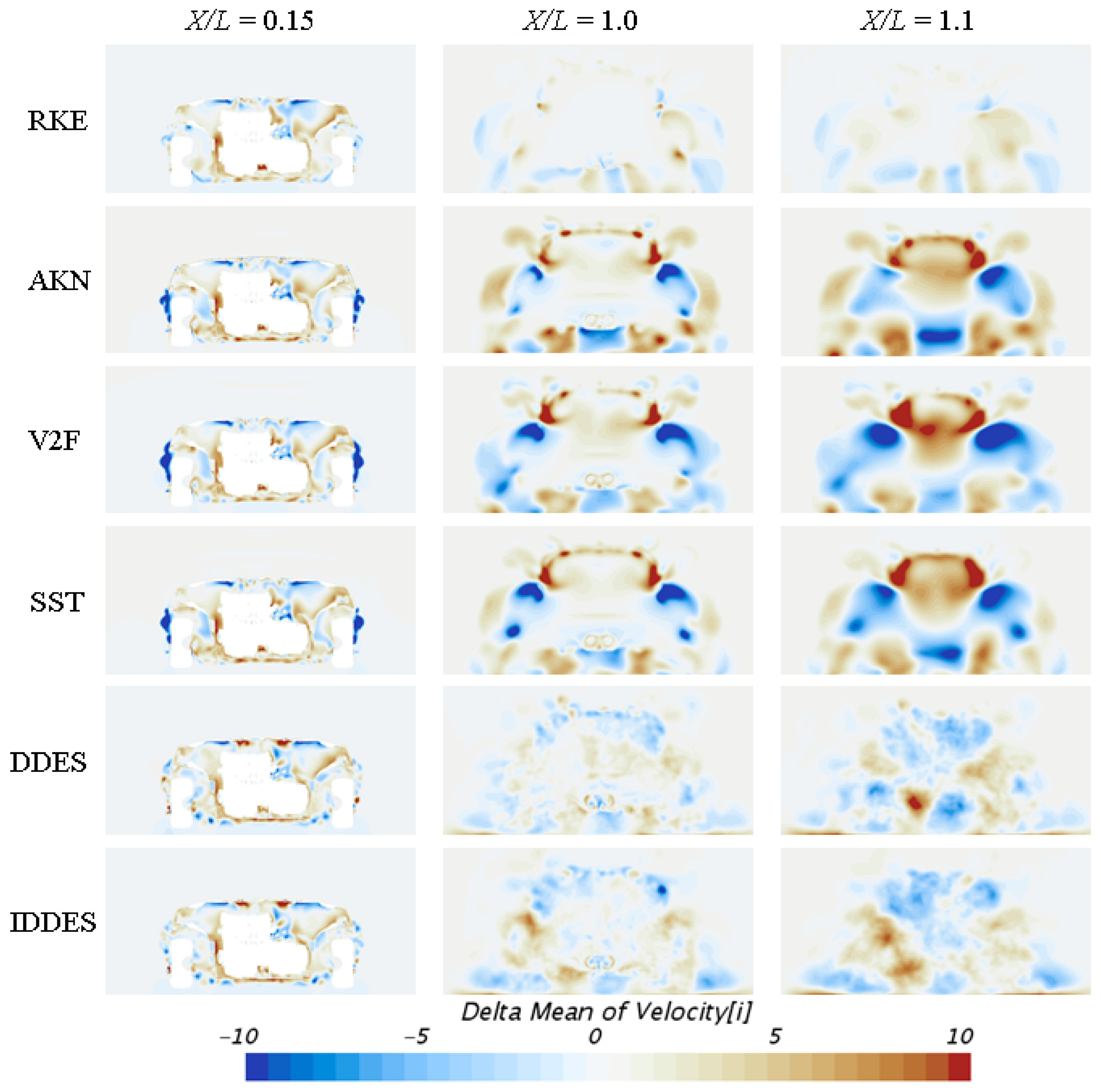
Scalar scenes of delta mean streamwise velocity (the mean streamwise velocity of Case 2 relative to the baseline Case 1), as obtained from the selected models, are shown in
Figure 21; see
Figure 17 for the location of these planes. The most significant differences in delta mean streamwise velocity at
corresponded to RKE predictions near the far left and right sides. These two area denote the region of the flow most influenced by the tire rotation effects. This indicates that the prediction of flows subject to rotation was different for the RKE model compared to the rest RANS model. Surprisingly, the RKE deltas were much more aligned with the predictions from the scale-resolved DDES or IDDES models, which again strengthens the earlier argument that the RKE-based RANS approach produced a more realistic flow field compared to the other steady state RANS models for this particular vehicle geometry. Another interesting point is that the RKE model predicted larger delta pressure distributions on most part of the vehicle, as shown in
Figure 20. Furthermore, the delta streamwise velocity on the two planes in the wake regions predicted by the RKE model was much smaller than that of the other three RANS models. On the other hand, the two DES variants predicted a slightly larger deviation than that of the RKE model, but much smaller than that of the other three RANS models.
4. Conclusions
This study presented a numerical evaluation of various commonly-used RANS models and hybrid RANS/LES models on a full-scale passenger vehicle with two different front-end configurations. The effect of turbulence modeling on the prediction of drag and lift forces, pressure, and velocity field were investigated. It was found that, firstly, the RKE model predicted a well-correlated
value for the baseline case; however, all the models investigated still needed significant improvement in order to predict the lift values consistently. Secondly, despite the DES variants not showing superior performance over RANS models for predicting the absolute
value, they were able to predict more complex flow structures with a higher fidelity. For example, in
Figure 13, the DDES model predicted a tertiary vortex near the exhaust pipes, and the IDDES model predicted a tertiary vortex under the spoiler. The similarity of the streamwise velocity profile and turbulent kinetic energy distribution on the selected planes between the predictions from the RKE model and the DES variants supports that the RKE model performed better than the other three RANS models for the baseline case.
In summary, for automotive flows that feature complex geometry and exhibit massive separation, the success of CFD simulation still heavily relies on the choice of mesh strategy and turbulent models, which in turn depend on the experience of the engineer. RANS models might still be a good choice for the prediction of drag values due to their acceptable accuracy, low computational cost, and fast turnaround time. However, for applications that require predictions of the detailed flow features, such as aeroacoustic, soiling, and water management, the transient DES type approaches would be a better choice.























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}