1. Introduction
There exists a rich literature on solving numerically fluid–structure interaction problems. Some methods are based on partitioned procedures, the fluid and structure sub-problems are solved separately using iterative process: fixed point iterations [
1,
2,
3], Newton-like methods [
4,
5,
6] or optimization techniques [
7,
8,
9]. Monolithic methods solve the fluid–structure interaction problem as a single system of equations, [
10,
11,
12,
13], or more recently [
14,
15,
16,
17].
In some methods such as the Arbitrary Lagrangian Eulerian (ALE) framework, the fluid equations are written over a moving mesh which follows the structure displacement (see [
18,
19]). Other methods use a fixed mesh for fluid domain: immersed boundary method [
20], distributed Lagrange multiplier [
21,
22], penalization [
23,
24], extended finite element method (XFEM) [
25,
26], and Nitsche-XFEM [
27]. Distributed Lagrange multiplier strategy with remeshing is used in [
28] and a monolithic fictitious domain without Lagrange multiplier is employed in [
29,
30].
Most of these methods are implicit. For a long time, the explicit methods were considered not suitable because of the lack of stability, but these methods are successfully applied in [
31,
32]. A third class of methods are so-called semi-implicit methods, where the domain is computed explicitly while the fluid velocity and pressure as well as the structure displacement are computed implicitly, [
33,
34]. In [
35], it is proved that a schema of this kind is unconditionally stable.
In this paper, a monolithic semi-implicit method is employed for three-dimensional simulation. For the structure modeled by the linear elasticity equations, we use the updated Lagrangian framework and, for the fluid governed by the Navier–Stokes equations, we employ the ALE method. A similar strategy is used in [
36] for a bi-dimensional compressible neo-Hookean model or in [
37] for a bi-dimensional linear elasticity model for the structure. As in [
38], we employ a global mesh for the fluid–structure domain where the fluid–structure interface is an interior boundary. Using globally continuous finite element for the velocity in the fluid–structure mesh, the continuity of velocity at the interface is automatically satisfied. The method is fast because we solve only a linear system at each time step. Three-dimensional numerical tests are presented.
In [
14,
15,
16,
17], a global mesh obtained from the deformed structure mesh and a fluid mesh generated at each time step, compatible at the interface with the structure mesh are used. Remeshing the fluid domain improves the quality of the mesh in the case of large deformation. The non-linear structure equation written in the Eulerian coordinates is obtained by using Cayley–Hamilton theorem. The fluid equations are solved by the characteristics method. The weak formulation of the fluid–structure interaction problem is written in the Eulerian domain, which is unknown, and a fixed-point algorithm solves the global non-linear problem at each time step.
In [
30], it is assumed that the structure is viscoelastic with the same viscosity as the fluid. Based on fictitious domain without Lagrange multiplier, the fluid is solved in a fixed mesh of the fluid–structure domain. The weak formulation contains integrals over the unknown Eulerian domain of the structure. At each time step, a fixed-point algorithm is employed.
In [
36], by using the Updated Lagrangian framework for a compressible Neo-Hookean structure, the weak formulation is written in the known configuration obtained at the precedent time step. By linearization around this configuration, at each time step, only a linear system is solved for the fluid–structure coupled equations and consequently the computing time is reduced. In the present paper, we follow this approach for three-dimensional simulations using linear elastic model for the structure.
If at each time step of the monolithic implicit methods, the fixed-point algorithm does not converge quickly or the computational time by fixed-point iteration is very expensive, thus the monolithic semi-implicit methods, which have similar stability properties and a reduced computational time, could be a good alternative.
2. Problem Statement
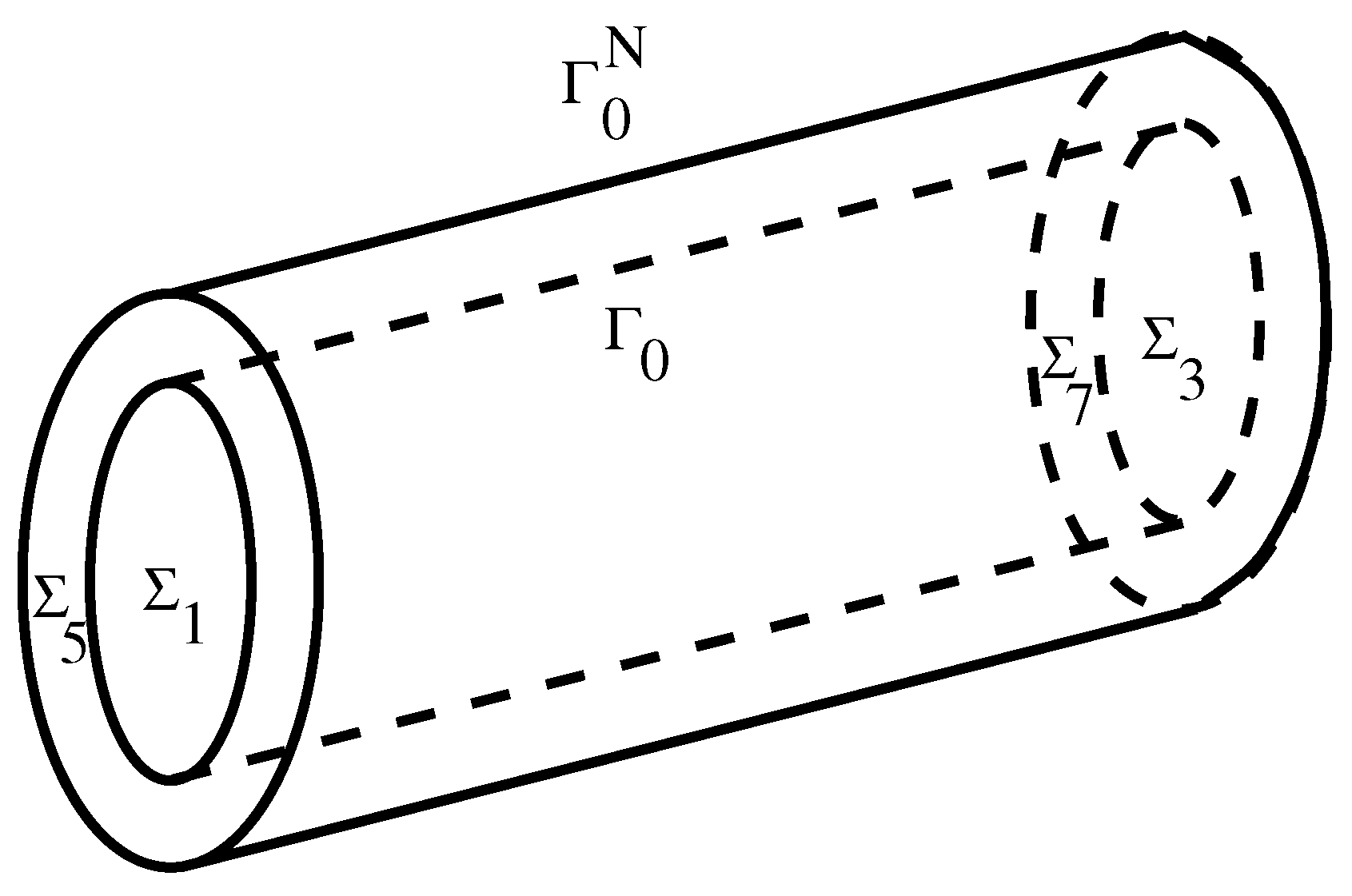
The initial fluid domain
is a right circular cylinder of bases
,
and lateral surface
. We denote by
the initial structure domain and we assume that it is a right annular cylinder of bases
,
, interior lateral surface
and exterior lateral surface
(see
Figure 1). We suppose that the initial structure domain is undeformed (stress-free). The boundary
is common of both domains and it represents the initial position of the fluid–structure interface.
At the time instant t, the fluid occupies the domain bounded by the moving interface and by the fixed boundaries , , while the structure occupies the domain bounded by the moving lateral surfaces , and by the fixed boundaries , .
We denote by the displacement of the structure. A particle of the structure whose initial position was the point will occupy the position in the deformed domain . At the time instant t, the interface is the image of via the map . The same relationship exists between and . On , we impose zero displacements.
We set the gradient of the displacement with respect to the Lagrangian coordinates . We denote by the gradient of the deformation, where is the unity matrix and we set . The second Piola–Kirchhoff stress tensor is denoted by .
We assume that the fluid is governed by the Navier–Stokes equations. For each time instant , we denote the fluid velocity by and the fluid pressure by . Let be the fluid rate of strain tensor and let be the fluid stress tensor. To simplify the notation, we write in place of , when the gradients are computed with respect to the Eulerian coordinates .
The problem is to find the structure displacement
, the fluid velocity
and the fluid pressure
such that:
where
is the initial mass density of the structure,
is the acceleration of gravity vector and it is assumed to be constant,
is the unit outer normal vector along the boundary
,
and
are the initial displacement and velocity of the structure,
and
are constants representing the mass density and the viscosity of the fluid,
and
are prescribed boundary stress,
is the unit outer normal vector along the boundary
, and
is the initial velocity of the fluid.
3. Updated Lagrangian Framework for the Structure Approximation
Introducing
, the velocity of the structure in the Lagrangian coordinates, Equation (
1) can be rewritten as
Let
be the number of time steps and
the time step. We set
for
. Let
and
be approximations of
and
. In the sequel,
Using the implicit Euler scheme, we approach the system in Equations (
13) and (14) by
Using Equation (16), we get and, consequently, and depend on the velocity . We have eliminated the unknown displacement and we have now an equation of unknown .
We can put Equation (
15) in a weak form: find
,
on
, such that
for all
,
on
. For instance, we have assumed that the forces
on the interface
are known.
The above formulation is also called the total Lagrangian framework, since the equations are written in the undeformed domain
. Now, we present the updated Lagrangian framework, where the equations are written in the domain
. We follow a similar method as in [
36], where the structure is a bi-dimensional compressible neo-Hookean material, or in [
37], where the bi-dimensional linear elasticity model is used.
We set
the image of
via the map
and we denote by
the computational domain for the structure. The map from
to
defined by
is the composition of the map from
to
given by
with the map from
to
given by
Using the notations
and
,
, we get
We have the relation between the Cauchy stress tensor of the structure
and the second Piola–Kirchhoff stress tensor
,
The mass conservation assumption gives , where is the mass density of the structure in the Eulerian framework.
For the semi-discrete scheme, we use the notations
and
Let us introduce and defined by and In addition, for , we define and by
Now, we rewrite Equation (
17) over the domain
. For the first term of Equation (
17), we get
and similarly
Using the identity
and the definition of
, we get
Details about this kind of transformation can be found in [
39], Chapter 1.2.
To write the above integral over the domain
, let us introduce the tensor
Since
(see [
39], Chapter 1.2) and taking into account Equation (
19), we get
Now, it is possible to present the updated Lagrangian version of Equation (
17). Knowing
,
and
, we try to find
,
on
such that
for all
,
on
. We recall that the forces
on the interface
are assumed known.
Using the identity
, we obtain
Using Equations (
18) and (
19), it follows that
For the linear elastic material, we have
where
and
are the Lamé coefficients. We have
From Equations (
21) and (
22) and the above equality, we get
We introduce and . For small deformations, we have , , then could be approached by and by .
Finally, we can approach the map
, by the simplified linear application
The linearized updated Lagrangian weak formulation of the structure is: knowing
,
and
, find
,
on
such that
for all
,
on
.
Remark 1. We can use a non-linear model for the structure such as St. Venant Kirchhoff, neo-Hookean, etc. By linearization of (around the deformed state at the precedent time instant), we obtain in place of Equation (23)where is a non-linear operator and ℓ a linear one. Since is a known term, we can transfer it to the right-hand side, then the problem to solve is linear, similar to Equation (24). 4. Arbitrary Lagrangian Eulerian (ALE) Framework for Approximation of Fluid Equations
The Arbitrary Eulerian Lagrangian (ALE) framework is a successful method to solve fluid equations in moving domain (see [
19]). Let
be a reference fluid domain and let
,
be a family of transformations such that:
for all
and
where
are the ALE coordinates and
the Eulerian coordinates.
Let be the fluid velocity in the Eulerian coordinates. We denote by the corresponding function in the ALE coordinates, which is defined by We denote the mesh velocity by and the ALE time derivative of the fluid velocity by
The Navier–Stokes equations in the ALE framework give:
We denote by
,
, and
the approximations of
,
, and
, respectively, all defined in
. Here, we set
. The time advancing scheme for fluid equations is: find
and
such that
The above time discretization scheme is based on the backward Euler scheme and a linearization of the convective term.
We multiply Equation (
25) by a test function
and Equation (26) by a test function
. After integrating them over the domain
and using the Green’s formula and the corresponding boundary conditions, we get the below discrete weak form. Find
and
such that:
for all
and for all
, where
We have assumed, for instance, that the forces on the interface are known.
The mesh velocity
can be computed from
For all , we denote by the map from to defined by . We set , and we remark that , for all .
We define the fluid velocity
, the fluid pressure
and the mesh velocity
by:
for all
.
5. Monolithic Formulation for the Fluid–Structure Equations
Let
be the global fluid–structure domain at time instant
n and let us introduce the global velocity and test function
At each time step, we solve the linear coupled problem: find
,
on
and
, such that:
for all
,
on
and for all
.
From the regularity
, the traces of
and
on
are well defined and
which is a discrete form of the continuity of the velocity at the interface (
8). Similarly, we get
.
Equation (
31) is obtained by adding Equations (
24) and (
29). By enforcement of the hypothesis of continuity of stress (Equation (9)) at the discrete level, the expression
does not appear anymore in Equation (
31).
| Algorithm for fluid–structure interaction |
| Time advancing scheme from n to |
We assume that we know , , .
Step 1: Solve the
linear system in Equations (
31) and (
32) and get the velocity
and the pressure
.
Step 2: Compute the fluid mesh velocity
To improve the quality of the mesh, we can replace in Equation (
33) the Laplacian by a linear elasticity operator.
Step 3: Define the map
by:
where
and
are the characteristic functions of fluid and structure domains.
Step 4: Set
,
, and
; consequently,
. Define
by
and
,
by:
Remark 2. (i) The domain is computed explicitly while the velocity and the pressure are computed implicitly. This kind of schema is also called semi-implicit. The monolithic system in Equations (31) and (32) is linear. (ii) Using globally continuous finite element for the velocity defined all over the fluid–structure global mesh, the continuity of the velocity at the interface holds, automatically.
(iii) The vertices in the structure mesh are moved using the structure velocity, thus the structure mesh is of updated Lagrangian type.
Remark 3. In [35], for linear elastic model for the structure and Navier–Stokes equations for the fluid, a semi-implicit monolithic algorithm is introduced. The unconditional stability in time is established. In a forthcoming paper, a proof of the unconditional stability of an algorithm will be presented for a non-linear model of the structure. This stable algorithm is similar to the one presented in this paper, only a stabilization term has been added, as in [35]. Remark 4. In this paper, the derivative of fluid velocity as well as the derivative of structure velocity are approached by the implicit Euler scheme. It is possible to use different time discretization schemes, for example Newmark for the structure and implicit Euler for the fluid. We have to pay attention to the time advancing algorithm for the interface. One solution is to solve the fluid–structure coupled equations written in the domain at the precedent time instant to find the fluid–structure velocity and the fluid pressure. Then, the structure including the interface is advanced by the Newmark scheme, and finally the fluid mesh velocity is computed using the new position and velocity of the interface.
6. Numerical Experiments
The numerical tests were produced using
FreeFem++ (see [
40]).
6.1. Straight Cylinder
We tested the benchmark studied in [
3,
4] concerning blood flow in artery. The geometrical configuration is represented in
Figure 1. The fluid occupies initially the straight cylinder of length
cm and radius
cm. The disk
is in the plane
and the axis of the cylinder is
. The viscosity of the fluid is
and its density is
.
The fluid is surrounded by a structure of constant thickness cm. The others physical parameters of the structure are: the Young’s modulus is , the Poisson ratio is , and the density is . The Lamé parameters are computed by the formulas and .
For the volume force in fluid and structure, we put
. The prescribed boundary stress at the inlet
is
for
and
at the outlet
. The structure is clamped at both ends,
and
. The remaining boundary conditions are Equations (3), (
8) and (9). Initially, the fluid and the structure are at rest.
Using
FreeFem++, it is possible to construct a global fluid–structure mesh with an “interior boundary” that is the fluid–structure interface. For the finite element approximation of the fluid–structure velocity, we used the finite element
and we employed for the pressure the finite element
. The parameters of meshes used for the numerical tests are presented in
Table 1.
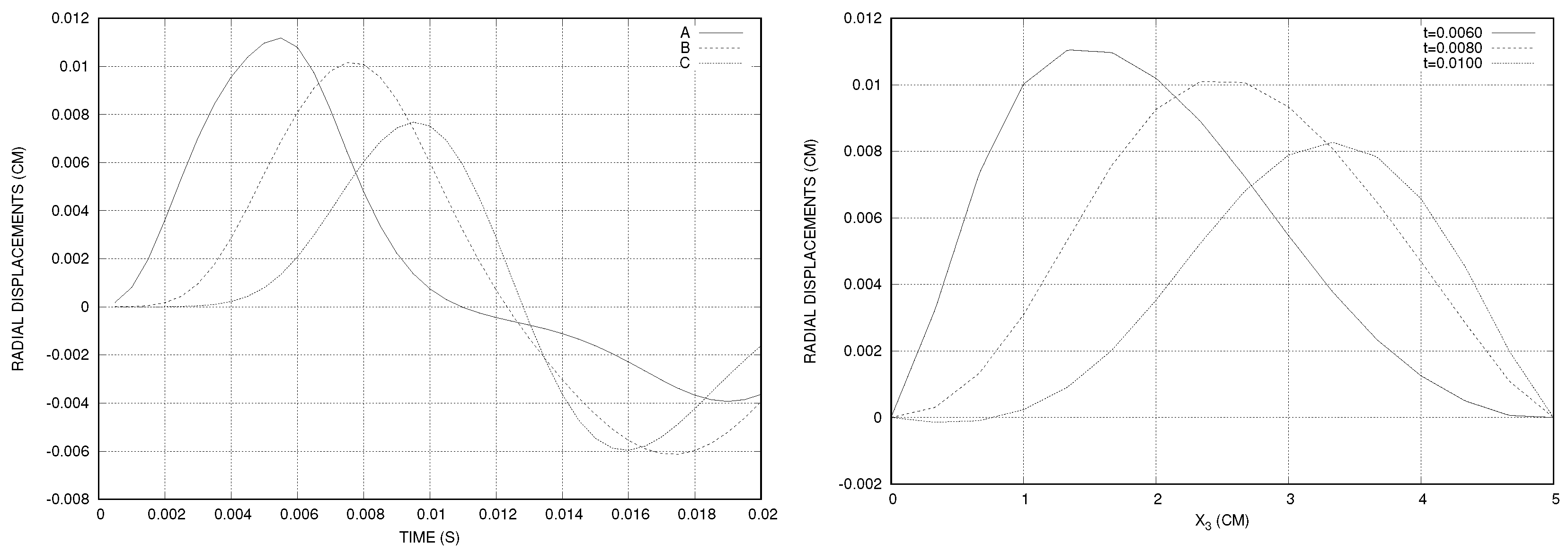
The time step was set to
s and the number of time steps to
. The radial displacement of the interface was measured at three points
,
, and
. We observed that the displacements were small, less than
cm (see
Figure 2, left). Similar results are observed in [
41] using non-conforming meshes. In addition, we measured the radial displacement along the line
,
on the interface (see
Figure 2, right.)
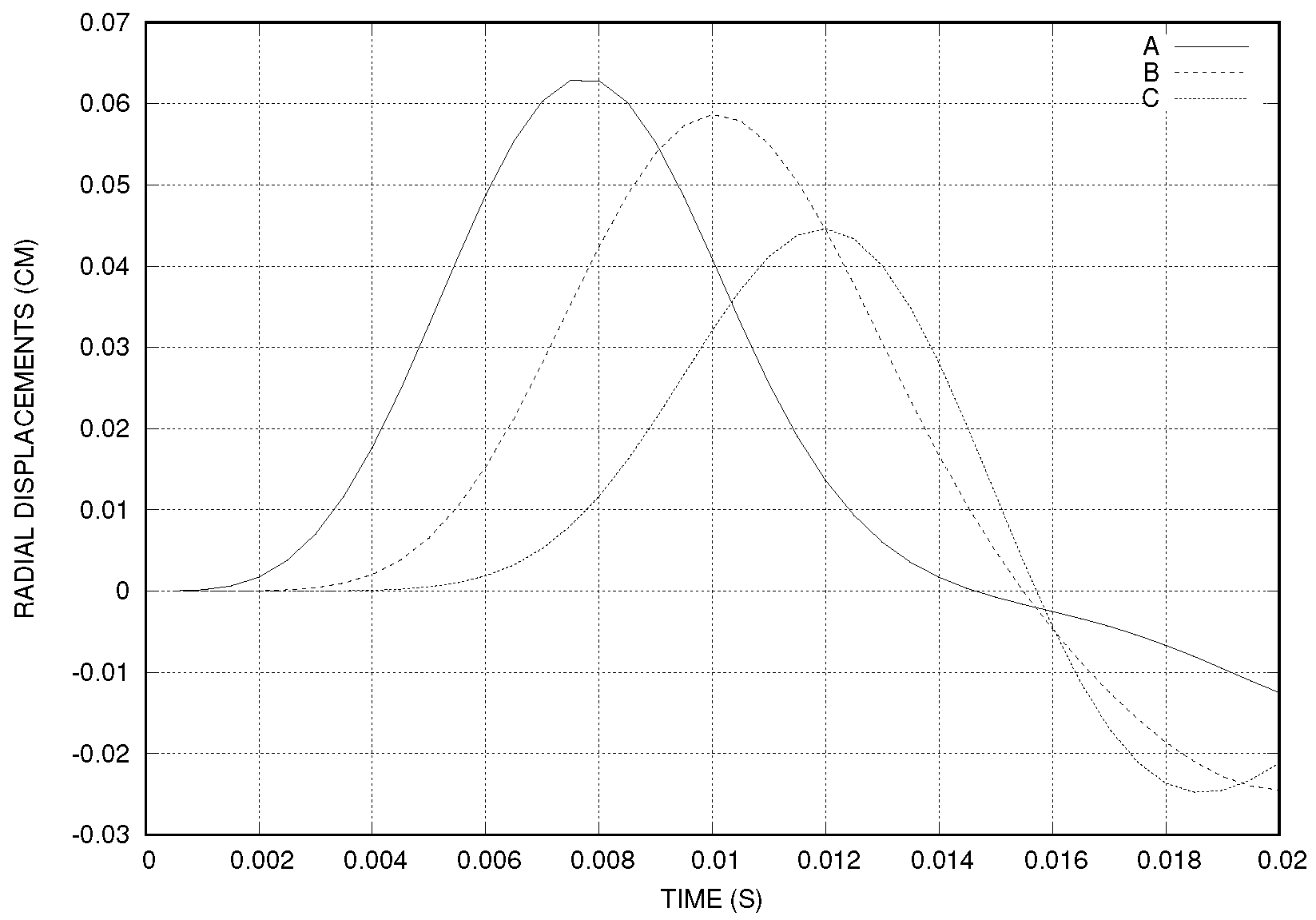
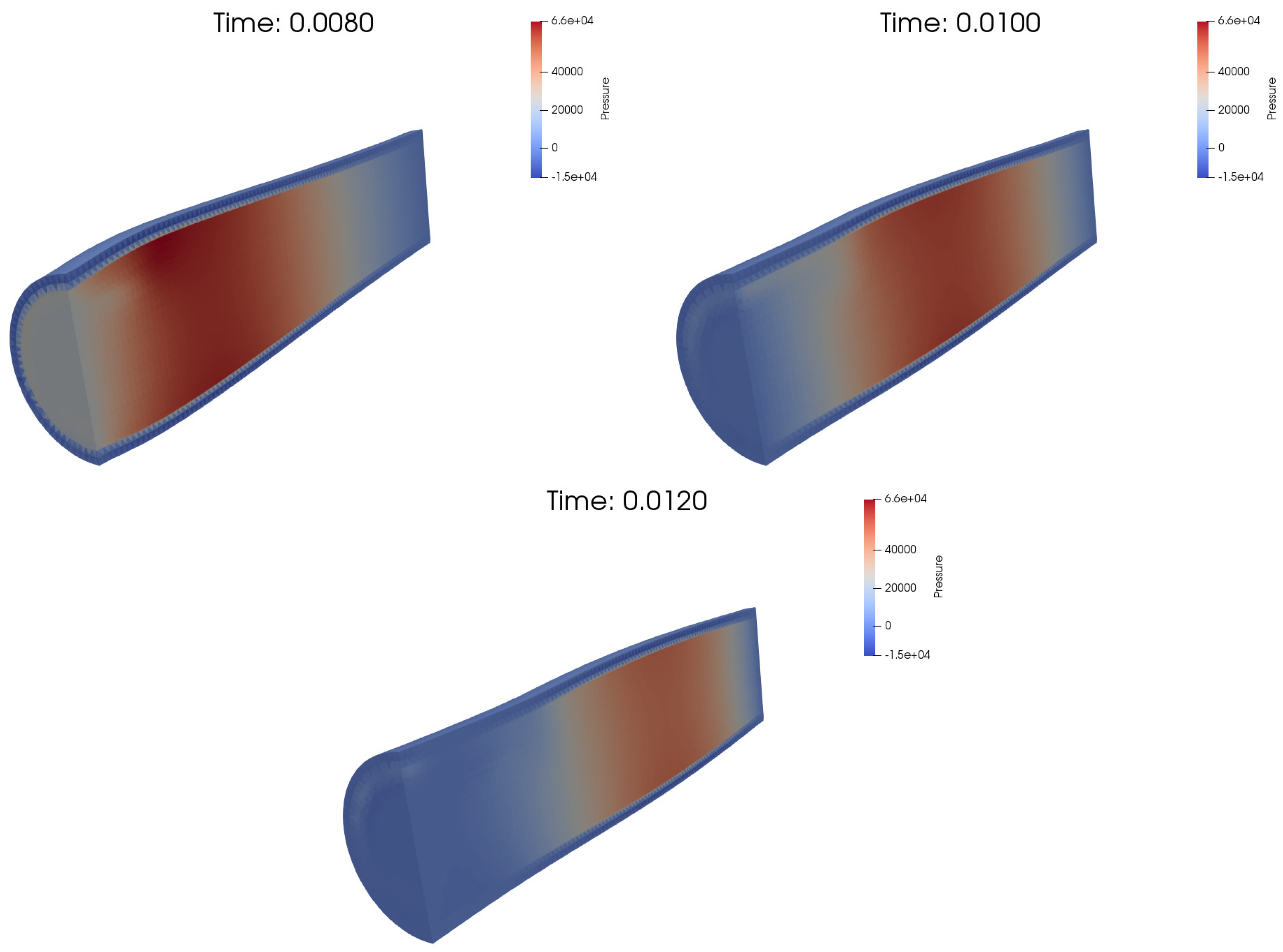
To obtain visible displacement, we also tested with the sin-like stress at the inlet:
where
s. The other parameters were the same. The displacements at three points are plotted in
Figure 3 and the pressure at three time instants is plotted in
Figure 4.
At each time step, we had to solve a sparse non-symmetric linear system for the fluid–structure velocity and pressure and a sparse symmetric positive definite linear system for the mesh displacement. The linear systems were solved using MUMPS (MUltifrontal Massively Parallel sparse direct Solver), implemented in FreeFem++. This method was very efficient; the total CPU time for the first three meshes were: 44 s (1.1 s/iteration) for Mesh 1, 173 s (4.3 s/iteration) for Mesh 2 and 1083 s (27 s/iteration) for Mesh 3, on a computer with a processor of 4 × 3.30 GHz frequency and 16 Go RAM. For Mesh 4, the CPU time was about 10 min/iteration on a noed Intel Sandy-Bridge 16 × 3.30 GHz and 64 Go RAM.
In [
4], the mean number of iterations per time step is: 33.9 for the fixed-point with Aitken acceleration and 8.9 iterations for a quasi-Newton algorithm. At each iteration of quasi-Newton algorithm, a linear system is solved. In [
41,
42], the average number of Newton iterations per time step is 3.
6.2. Cane Cylinder
We considered the fluid–structure interaction in a cane-like geometry inspired from [
4,
43]. The parameters of the fluid domain were:
cm,
cm,
cm,
cm (see
Figure 5, left). The fluid was surrounded by a structure of constant thickness
cm.
The time step was
s, but the final time was
s. The other parameters were the same as in the case of the straight cylinder. The details of meshes used for the numerical tests are presented in
Table 2.
We measured the displacement of the interface ar three points:
at
,
at
and
at
(see
Figure 6). The pressure at three time instants is plotted in
Figure 7. We observed that, for the sin-like stress at the inlet, the structure displacements were greater than 0.23 (cm) and a non-linear model for the structure could be more appropriate. We chose a sin-like stress at the inlet with maximal value five times greater than the constant case to obtain visible deformations. Even though we used the same sin-like stress at the inlet, the structure displacements were larger than in the straight cylinder case because of the shape as well as because the cane was longer. Recall that the structure was fixed at both ends.
The total CPU time for the three meshes were: 255 s (3.18 s/iteration) for Mesh 1, 502 s (6.2 s/iteration) for Mesh 2 and 915 s (11.2 s/iteration) for Mesh 3, on a computer with a processor of 4 × 3.30 GHz frequency and 16 Go RAM.
In [
4], the mean number of iterations per time step is 8.9 for quasi-Newton algorithm. The fixed-point algorithm with Aitken acceleration failed.
6.3. Artery Stenosis
Now, we considered a fluid–structure interaction in artery stenosis inspired from the paper [
42]. The inlet and outlet surfaces
,
were disks of radius
R, normal to the axis
of centers
and
, respectively. The lateral surface
of the initial fluid domain was composed by the bottom half straight cylinder surface
and the stenosis surface (see
Figure 8), obtained from the top half straight cylinder surface
via the map
The initial boundary of the structure domain was composed by: the interior lateral surface
, which is the fluid–structure interface; the exterior lateral surface
and two annular surfaces
,
, of radii
R and
, normal to the axis
, of centers
and
, respectively.
The numerical values were:
cm,
,
cm,
cm, and
cm. The details of meshes used for the numerical tests are presented in
Table 3.
We used the same sin-like stress at the inlet similar to the precedent experiments
where
s and
is a parameter.
For
Mesh 1, the time step was set to
s, the number of time steps to
and
. The total CPU time was 323 s (8.07 s/iteration), on a computer with a processor of 4 × 3.30 GHz frequency and 16 Go RAM. The radial displacement of the interface was measured at three points:
,
, and
(see
Figure 9). We observed that the maximal displacement of point A was more than 0.08 cm, which was more important than in the case of straight cylinder (see
Figure 3). The artery deformation was more important in the uphill zone of the stenosis than in the case of healthy artery.
For Mesh 2, the time step was set to s, the number of time steps to and . The total CPU time was 15,123 s (75.6 s/iteration), on a noed Intel Sandy-Bridge 16 × 3.30 GHz and 64 Go RAM.
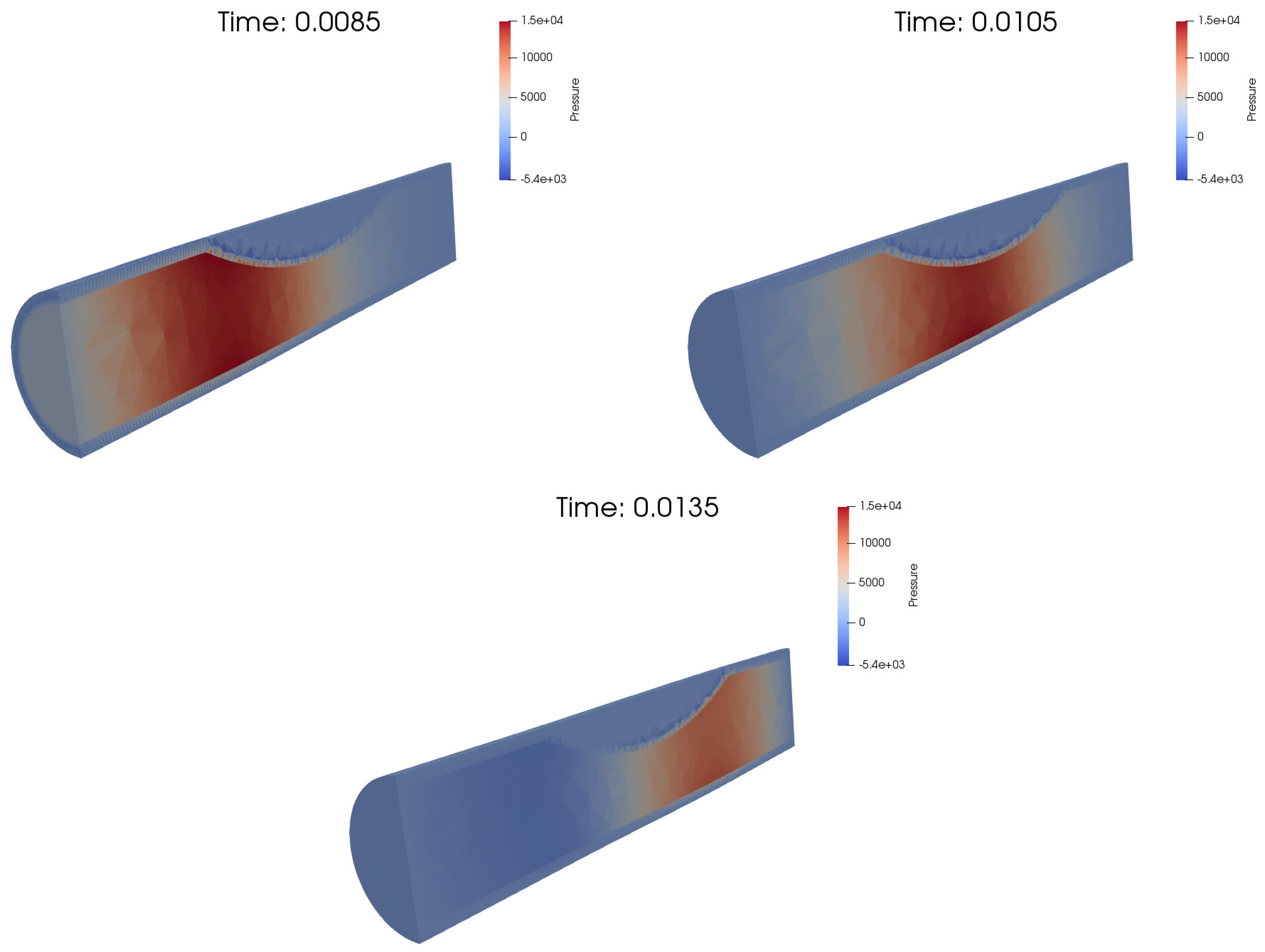
For
Mesh 3, the time step was set to
s, the number of time steps to
and
. The average CPU time was 4 min 55 s by iteration, on a noed Intel Sandy-Bridge 16 × 3.30 GHz and 64 Go RAM. The pressure at three time instants is plotted in
Figure 10.
For Mesh 4, the time step was set to s, the number of time steps to and . The average CPU time was 18 min 8 s by iteration, on a noed Intel Sandy-Bridge 16 × 3.30 GHz and 64 Go RAM.
For finer mesh, we were forced to use smaller time steps. This phenomenon was observed for neither the three-dimensional tests presented above nor for the two-dimensional benchmark flow around a flexible thin structure attached to a fixed cylinder (see [
37]). The semi-implicit algorithms had good stability properties (see Remark 3). We suppose that the source of the problem is this particular surface mesh of the stenosis zone obtained from the mesh of the top half straight cylinder surface by vertical projection on the stenosis surface.
7. Conclusions
We have presented a monolithic semi-implicit method for three-dimensional fluid–structure interaction problems. At each time step, we solve only a linear system to find the fluid–structure velocity and the fluid pressure, thus the method is fast. We use a global mesh for the fluid–structure domain where the fluid–structure interface is an interior boundary. Using globally continuous finite element for the velocity in the fluid–structure mesh, the continuity of velocity at the interface is automatically satisfied.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}