1. Introduction
Recent advances in the accessibility and quality of remote sensing data products accelerate the number of their applications in landscape studies, including water management. Remote sensing data represent an accurate and reliable tool for landscape planning, enabling objective assessment of the complex segments of the riverscape [
1,
2]. However, the broader use of satellite imagery in the stream restoration design and monitoring projects remains limited due to the coarse spatial resolution of the imagery [
3]. The low spatial resolution of the imagery, however, limits applications of the satellite data to large rivers, where the potential of the multispectral and hyperspectral imagery is used mainly for classification of vegetation properties of the riverscape [
4,
5]. The substantial shift of the applicability of the remotely sensed data has been brought by the increasing availability of high-resolution aerial orthoimagery, allowing the distinction of basic hydromorphological properties of the physical stream habitat [
6,
7]. However, the orthoimagery products based on the airborne imagery still suffer from two substantial limitations. First, the imagery resolution, although continuously increasing, still does not allow the analysis of the physical habitat and structural properties of small streams, typical in the urban and suburban environment, that are the subjects of restoration. Second, and more important, is the limitation by low temporal resolution and poor operability of the survey. The typical interval for a geodetic survey is in years, while the monitoring of the stream restoration projects requires higher frequency and flexibility to capture the data on demand.
Unmanned aerial vehicles and systems (UAV, UAS, drones), as a rapidly evolving yet proven imaging technology, emerged and developed as a technique suitable to fill the needs of detailed monitoring of the riverscape [
8,
9,
10]. Prior to the recent generation of stabilized imaging platforms, there were attempts to use the plane or helicopter models for close-range photogrammetric surveys of stream restoration [
11,
12]. The recent development of UAVs, providing reliable and user-friendly imaging platforms for geosciences, opens up new possibilities for the detection of stream properties and monitoring at a high level of accuracy [
13,
14]. Customizable flight routes at low-level altitudes in combination with new algorithms for photogrammetric processing provide 2D and 3D spatial data products of very high spatial resolution, suitable for qualitative and quantitative analysis of natural and artificial structures of streams and floodplains. A number of studies proved the potential for applications of UAVs in the monitoring of the principal riverscape elements, which is important for the monitoring and assessment of the stream restoration projects. In particular, it applies to the monitoring of fluvial dynamics and the channel changes after flooding [
13,
15,
16]. The UAV-based high-resolution data were successfully applied for the assessment of the fish stream habitat conditions [
17] as well as the complex habitat monitoring [
18]. High-resolution UAV data were used for monitoring of changes in floodplain vegetation [
19].
UAV imaging as the resource for assessing stream restorations in the urban or suburban landscape is, however, still used sparsely. The unmanned imaging platforms, however, have the potential to be an optimum resource for objective stream restoration monitoring, balancing the needs for high spatial resolution, a combination of 2D and 3D information, complex coverage of the restoration site, and the ability for recurrent monitoring. The photogrammetric products of the UAV imaging campaigns are delivering the seamless orthoimagery and 3D models with a spatial resolution of 2–5 cm per pixel, depending on the imaging altitude and sensor type [
20]. In most cases, the typical size of a restoration of a small stream in cities and suburban zones reaches 1–2 km of the stream length, which is an extent coverable by a UAV platform. Last, but not least, the UAV platforms are cost effective and allow us to design the recurrent multitemporal monitoring campaigns as well as the ad-hoc surveys.
The aim of this study was to identify the aspects of stream restoration, where the UAV imaging can bring qualitatively new information, applicable for the monitoring and evaluation of stream restorations in an urban landscape and test the appropriate photogrammetric and geoinformatic methods. In particular, the assessment was focused on the verification of the compliance of the stream restoration with the plan, analysis of the riparian habitat changes, detection of eutrophication, identification of changes of stream channel, and testing of the ability of the restored stream to cope with the flood events. The analysis is based on three years of recurrent UAV monitoring of the Hostavicky brook in Prague, Czech Republic, where a complex restoration of the stream and the riparian zone was realized in 2015.
2. Materials and Methods
2.1. Post-Project Monitoring of Stream Restoration
One specific problem of stream restorations, including the projects in the urban landscape, is the frequent lack of systematic post-project monitoring and evaluation of further evolution of the restored system [
21]. Deficiency in such information makes it difficult to assess the effectiveness of restoration, to identify its positive aspects, as well as the structural problems or failures [
22]. The reasons for the monitoring deficiency are manifold; ranging from the lack of suitable data sources to methodological deficiencies in project planning and management, lack of a complex approach aiming at the sustainability of the restoration, and its efficiency in a long-term perspective. This can also result from irresponsible investment strategies, benefiting from one-off funding opportunities aimed at physical restoration, but without planning of the post-project activities, including monitoring [
23].
The stream restoration project always represents a complex study balancing various needs, ranging from the improvements of the hydromorphological status of a stream, the keeping of the given hydraulic properties of the structures, securing the flood protection, as well as to secure the future stability of the structures or improvements of environmental and socioeconomic status. The accordance of the realized stream restoration works to the approved study plan should thus be regarded as a primary sign, indicating the potential for the functionality and sustainability of the restoration works in the long-term perspective. Failures in respecting the restoration plan may result in a range of substantial issues including the inadequate level of flood protection, instability of the stream channel with elevated bank or bed erosion, limited sustainability of the restoration, or unused potential for improvements of ecological and hydromorphological status.
The success of stream restoration projects largely depends on the multiple constraints and limitations given by the specifics of the given conditions, which is of special importance in urban and suburban environments. Urban streams have complex hydrology, however they feature simplified geomorphology and reduced ecological function [
22]. The intense alterations of stream morphology result in flashier hydrograph, intense pollution, and reduced biotic richness [
23]. Nevertheless, the potential for stream restoration in urban zones is limited. The land is usually extremely expensive and thus intensely exploited, so there is very limited space left for restoration projects. These are, especially in the inner cities, typically focused on the stream channel and its close vicinity, often excluding even the riparian zone [
24]. The sub-urban zones offer more opportunities for restoration and inclusion of the wider area of the floodplain. Despite the higher restoration potential of such zones, the projects are often limited to the isolated stream segments, corresponding rather to the urban development plans than the water management [
25]. The restoration is, thus, often aiming at improvements of the aesthetic aspects of urban space rather than providing a complex restoration of the hydrological and ecological functions of the hydrological system. The variety of restoration practices is another aspect making the assessment of stream restoration and selection of appropriate criteria difficult [
24,
26].
General principles allowing us to distinguish the restoration success have been proposed in Reference [
27] as follows: (i) The design of an ecological river restoration project should be based on a specified guiding image of a more dynamic, healthy river that could exist at the site; (ii) the river’s ecological condition must be measurably improved; (iii) the river system must be more self-sustaining and resilient to external perturbations so that only minimal follow-up maintenance is needed; (iv) during the construction phase, no lasting harm should be inflicted on the ecosystem; and (v) both pre- and post-assessment must be completed and data made publicly available.
Although many authors concur on the need for a system and criteria for assessment of ecologically successful river restoration, no common standards were defined or accepted [
25,
27]. A common agreement is in the need of a framework, allowing assessment of the success and evolution of the key aspects of stream restoration [
28] based on objectively detectable parameters, e.g., water quality, channel morphology, stability after high flow events, progress in establishing native plant communities, and measuring fish and wildlife presence [
29]. An example of such an approach is the framework proposed in Reference [
21]. The authors proposed the following evaluation criteria for the five general objectives:
Channel capacity and stability (e.g., channel cross sections, flood stage surveys, width-to-depth ratio, rates of bank or bed erosion, longitudinal profile),
Improvement of aquatic habitat (e.g., water depth, velocities, cover, shading, pool/riffle composition, bed material composition, invertebrates, macrophytes),
Improvement of riparian habitat (e.g., percent vegetation cover, species densities, size distribution, age class distribution, plantings survival),
Improvement of water quality (e.g., temperature, pH, dissolved oxygen, conductivity, nutrients, turbidity, suspended matter, trash loading),
Recreation and community involvement (e.g., landscape control point surveys, recreational use surveys, participation in management).
This framework was used in this study as a basis for identification of criteria, where the UAV technologies can supply information on stream restoration. Selection of evaluation criteria focused on the aspects of monitoring, where the high-resolution imagery can bring reliable and qualitatively new information, applicable in the evaluation. From the above-stated list of criteria, it applies to the objectives 1 and 3, i.e., the changes in the physical and qualitative state of the channel and riparian zone. To these objectives, there was added a criterion of the compliance of the geometric properties of the realized stream restoration to the plan as an important sign, indicating potential discrepancies in hydrological and ecological functions of the new system from the calculated plan. Hence, the applicability of the UAV monitoring was tested on the following aspects of the stream restoration:
Compliance of the stream restoration with the plan,
Channel stability and evolution,
Flood mitigation effects,
Changes in riparian habitats.
2.2. Study Area
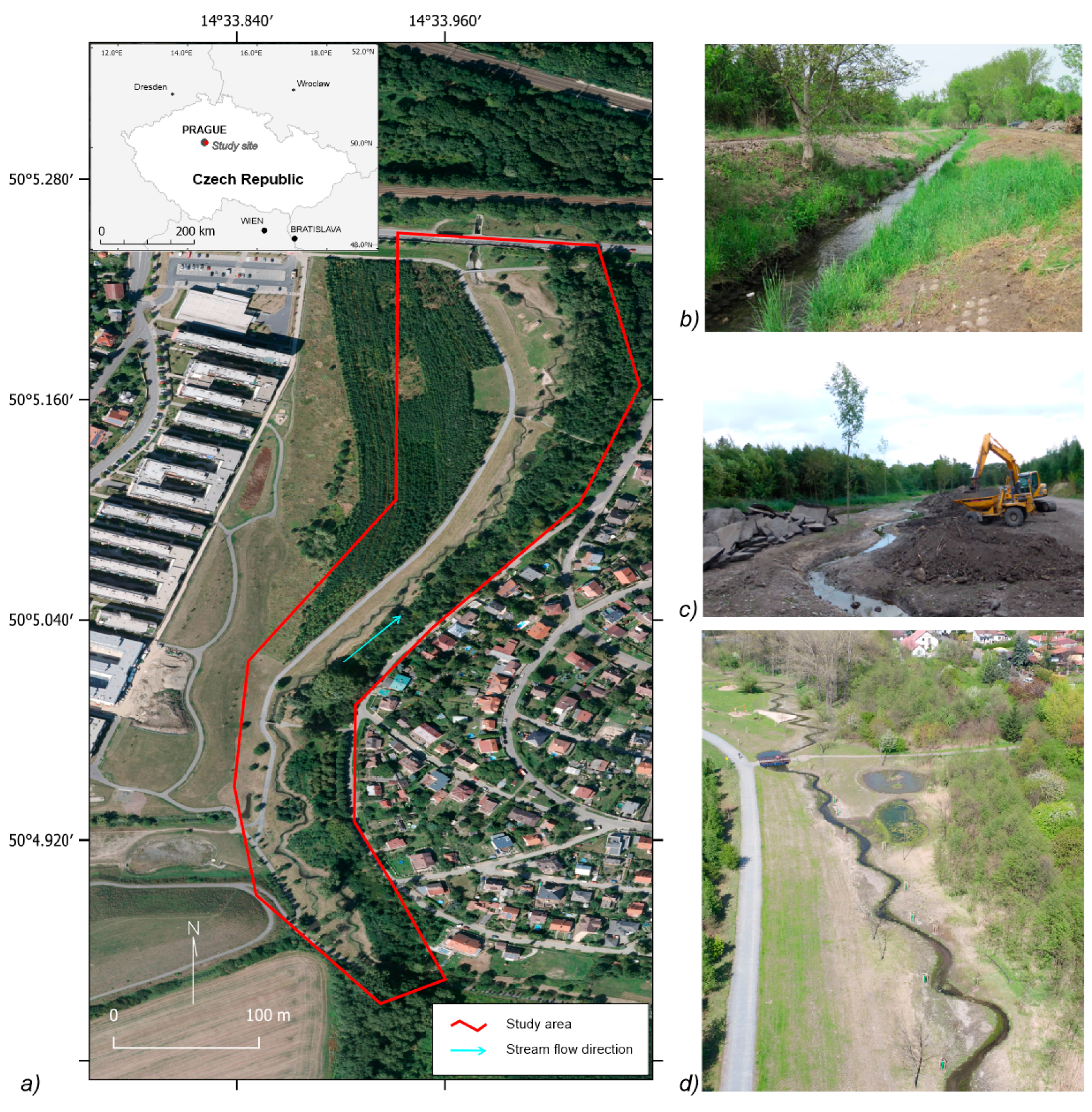
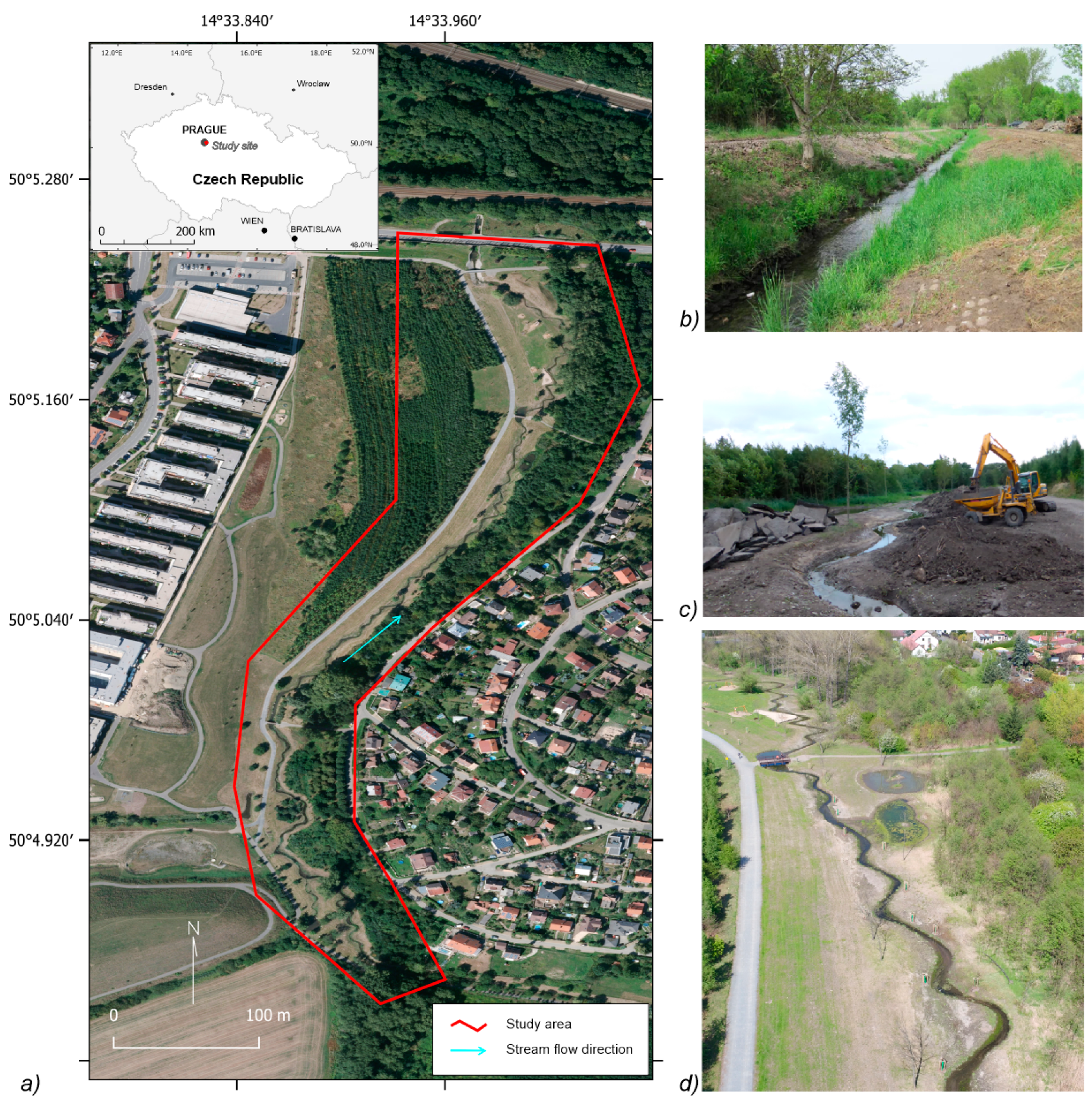
The study area of Hostavický brook in Prague is a 1 km long segment of the stream in an urbanized area that underwent a complex restoration in 2015 (
Figure 1). The assessed stream is located in the north-eastern boundary of the Prague metropolitan area, in a zone between the old housing and new development area. The stream was channelized in the 1980s during construction of the new road and highway infrastructure in the area. For three decades, the study area was an abandoned zone of the sub-urban “new wilderness” [
30,
31], featuring a spontaneous succession of vegetation over the former agricultural land without management. In consequence of development of new residential complexes, the City of Prague in 2015 realized a project of a complex revitalization of the area, aimed not only to the restoration of the meandering system of the stream, but also to build the recreational infrastructure for the public, including the cycle route, playgrounds, and park [
32]. The key elements of the restoration of Hostavický brook, the stream corridor, and ponds were finished in November 2015. The whole complex of restoration works, including the grassing of the riparian zone and planting of trees stabilizing the newly built channel, was opened in spring 2016.
The study site is subject to frequent flooding of low magnitude, resulting from the spring and summer rainstorms. Since the restoration in fall 2015, several rainstorms have been recorded resulting in local flooding, e.g., in June 2016, August 2016, June 2017, and June 2018. The most intense flood recorded in the area for the last decade was the event on June 29, 2017. The city of Prague was then hit by a heavy rainstorm with the precipitation totals of 80–110 mm per 24 h, while most of the precipitation totals were recorded in 12 h. The study site is not equipped with a direct meteorological or hydrological station, however, the monitoring in the neighboring stations in Prague indicated that the magnitude of the event corresponded to a recurrence period of 20–100-year precipitation. The consequent flood in the area resulted in extensive spills, local landslides, and damage to residential zones [
33]. This flood was thus used for testing the capacity of the newly designed stream system and its ability to cope with a flood event of medium magnitude.
2.3. UAV Monitoring Setup
The UAV monitoring in the study area was undertaken for three years after the restoration works. In total, 29 imaging campaigns were realized over two years, from September 2015 until April 2018. Two initial campaigns were done by the DJI Phantom 2 Vision plus platform (DJI, Shenzen, China), and the 27 following campaigns then performed by the DJI Inspire 1 Pro system.
The Inspire 1 Pro platform (
Figure 2), used for the imaging since November 2015, is driven by four propellers, enabling a flight of a length of 15–22 min, according to the payload. The maximum distance of the control system is 2 km, the physical maximum altitude of 1 km [
34] is, in practice, limited by the legislation regulations, limiting drone traffic at a level under 300 m above ground. The control system of the drone also allows, besides the manual control, the flying of pre-programmed routes, which was used for the recurrent imaging campaigns. The platform was equipped with the DJI Zenmuse X5 camera (cDJI, Shenzen, China) with interchangeable lenses, equipped for this study with the 12 mm Zuiko prime lens (Olympus, Tokyo, Japan) with 84° field of view (FOV), 24 mm equivalent in 35 mm system, and with a Zenmuse X3 camera (DJI, Shenzen, China), featuring a fixed lens with focal length 3.6 mm (94° FOV, 20 mm equivalent in 35 mm system). The X5 camera has a 17.3 × 13.0 mm CMOS sensor of micro 4/3 standard, featuring a resolution of 4608 × 3456 pixels (16 Mpix), capturing in Red, Green and Blue (RGB) spectral bands. The X3 camera features a Sony EXMOR 1/2.3” CMOS chip (Sony, Tokyo, Japan) with a resolution of 4000 × 3000 pixels [
34]. The DJI Phantom Vision plus, used for the first two campaigns, is a multirotor platform, equipped with a 14 Mpx panchromatic camera with a resolution of 4384 × 3288 pixels and a fixed lens with 5 mm of focal length and 110° FOV, equivalent to 18 mm for 35 mm system [
35].
The imaging campaigns were scheduled in a bi-monthly interval with exceptions in winter when the stream was under snow cover. During the period of extensive construction works on the stream restoration in 2015 and during the flash floods, the regular campaigns were completed by additional imaging (
Table S1).
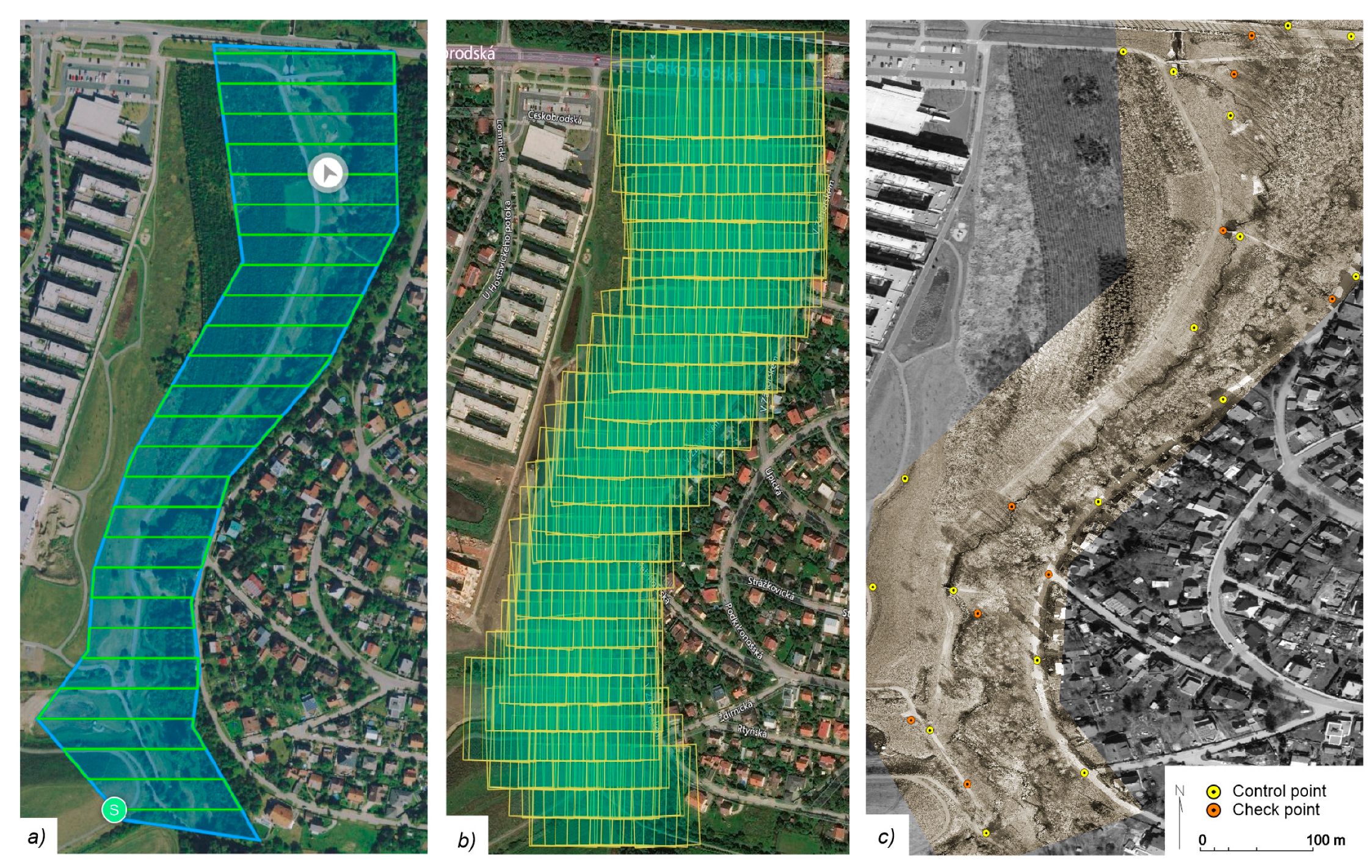
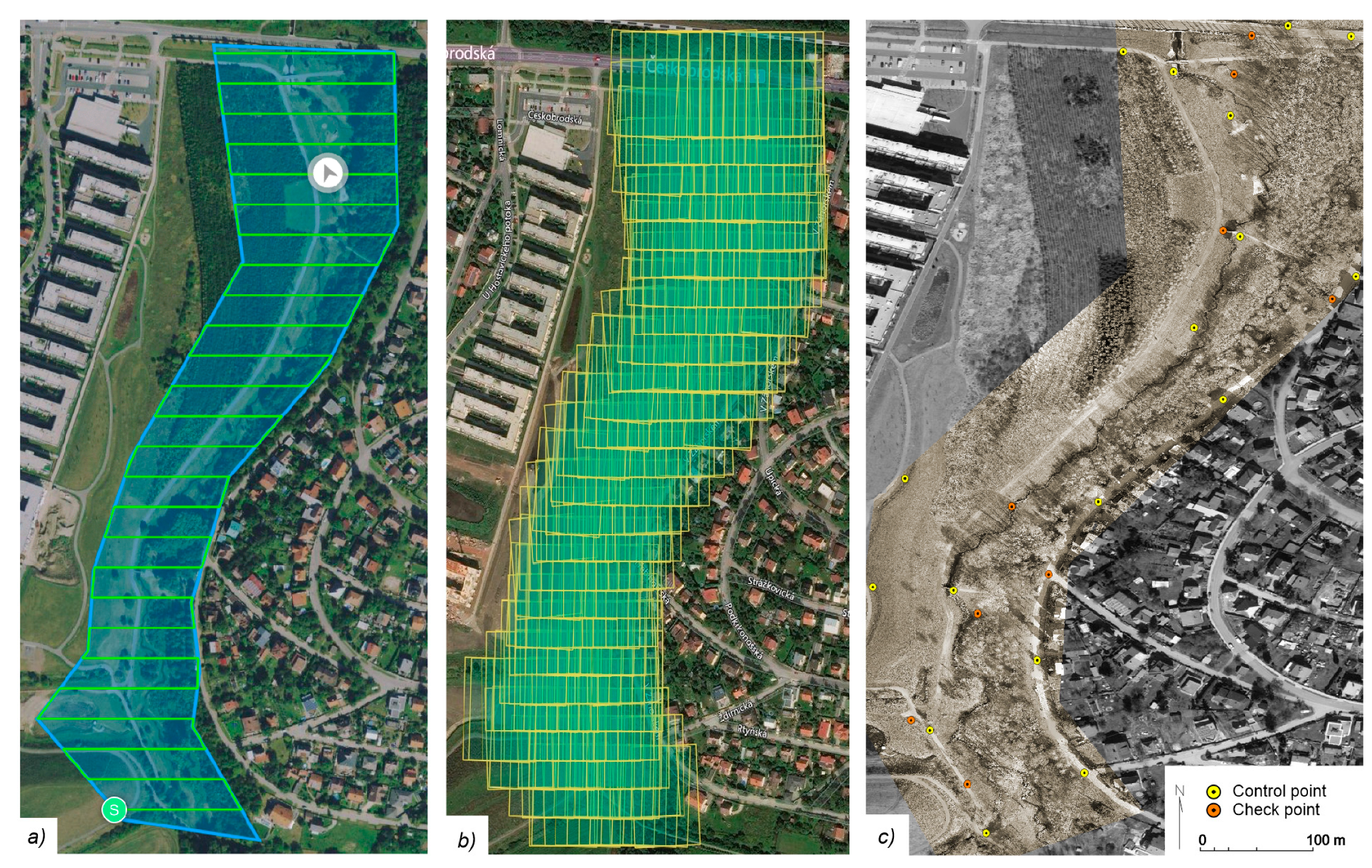
The imagery was taken from an altitude of 50–70 m above ground, resulting typically in 290–320 images per campaign and sensor. The design of the flight route was set to cover all the key components, important for the hydromorphological status of the stream and the riparian zone (
Figure 3a). The pre-programmed flight plan for imaging was designed to cover the area with a 70% front and side overlap (
Figure 3b). One imaging campaign consisted of 2–3 flights of approx. 15 min each, according to the weather conditions affecting the flight time. As a result, the complex segment of a stream in a length of 1 km is covered by a multitemporal set of seamless orthoimagery with the resolution of 1.3–1.7 cm per pixel according to the applied sensor and flight altitude (
Table S1).
For georeferencing, 26 ground control points (GCPs) were used. The control points were defined at the stable structures of the urban environment, which are apparent in the imagery and have geodetically surveyed position available from the digital city plans, such as sewer lids, edges of buildings, or concrete structures (
Figure 3c). From the total of 26 GCPs, 15 were used as control points for georeferencing and 9 as checkpoints to validate the accuracy of photogrammetric processing. Mean differences in x and y coordinates at the checkpoints typically reached 1.5–3.5 cm, while the maximum differences, observed at the outer parts of the scene, did not exceed 10 cm.
2.4. Photogrammetric Processing
The nadir UAV imagery was used for the photogrammetric reconstruction using the structure from motion (SfM) algorithm, enabling automatic determination of the elements of internal and external camera orientation from the aerial imagery [
36]. This approach enables us to perform a reconstruction of the 3D topography from the imagery taken from different viewpoints and even combining the imagery taken in nadir and oblique angles [
14,
36]. The automation of image alignment, ability to cope with unstructured imagery, and availability of complex software tools have eliminated the key constraints of conventional photogrammetric approaches and stimulated the recent upswing of UAV applications in geosciences [
37].
The photogrammetric workflow based on the SfM approach consists of several steps—(i) the acquisition of the imagery with adequate front and side overlaps, (ii) detection of corresponding pairs of points for aero triangulation and image alignment, forming a sparse cloud, (iii) generation of dense point cloud, from which are derived two key deliverables: (iv) The digital surface model (DSM) and (v) the orthoimage [
38].
Two photogrammetric tools with different workflows and requirements for computing equipment and photogrammetric skills of operators necessary for processing were used. The Agisoft Photoscan Pro 1.4.1 desktop software [
39] was used as a primary tool for complex photogrammetric processing of the imagery. This photogrammetric suite allows the control of the whole processing workflow with detailed settings of all parameters. A PC-based workstation, equipped with Intel Core i7 processor (Intel, Santa Clara, CA, USA), 64GB DDR4 RAM, and two Nvidia GTX 970 GPU (Nvidia, Santa Clara, CA, USA) acceleration units was used for data processing. The processing of one imaging campaign with the highest quality setting required typically 9–15 h of processing time. As the supporting processing tool, the cloud-based DroneDeploy tool [
40] was used. This cloud-based service allows an easy and rapid photogrammetric of UAV imagery without demanding computing equipment. In this study, the DroneDeploy tool was used for immediate checking of the data quality and consistency of the imagery before the full photogrammetric processing of the datasets. Such preprocessing required typically 1–2 h of cloud computing for one imaging campaign.
The photogrammetric processing of imagery from the recurrent imaging campaigns resulted in a multitemporal set of 29 orthoimages, spanning from September 2015 to September 2018 (
Table S1). The orthoimages, featuring native resolution from 1.2 to 1.55 cm per pixel according to the flight parameters were sampled to a uniform resolution of 2 cm per pixel, adequate for identification of the stream and floodplain features (
Figure 4). From the orthoimagery, there were quantitative and qualitative indices derived, applicable for the stream restoration assessment.
2.5. Analysis and Processing of the UAV Orthoimagery
The UAV-based imagery was used for the analysis of different aspects of the status and changes in the riverscape, using different techniques for extraction of the spatial, quantitative, or qualitative information from the imagery. In particular, it applied to the extraction of linear features (reflecting the changes of the stream channel), the areal features (expressing the spatial extent of vegetation or water spills), as well as the analysis of qualitative changes in the riparian zone and eutrophication processes.
2.5.1. Delineation of Geometric Properties of the Channel
To extract the shape of the stream line from the high-resolution imagery, different approaches are used in the literature. The common methods use conventional manual digitizing of the stream line from the orthoimages [
41], automated detection, employing the techniques based on separation from the multispectral image [
42], or techniques based on the topographic supported approaches [
43]. Another option for the automated delineation of the stream channel represent the graphical tracing algorithms used i.e., in historical cartography [
44]. However, for hydrological application, such approaches are typically applied on medium-sized and large rivers, where the stream can be distinctly separated from the background. In the studied environment of a small urban stream, the narrow channel is, in several parts, obscured by the riparian vegetation, which makes the fully automatic stream delineation uneasy, so a semi-automated approach was used.
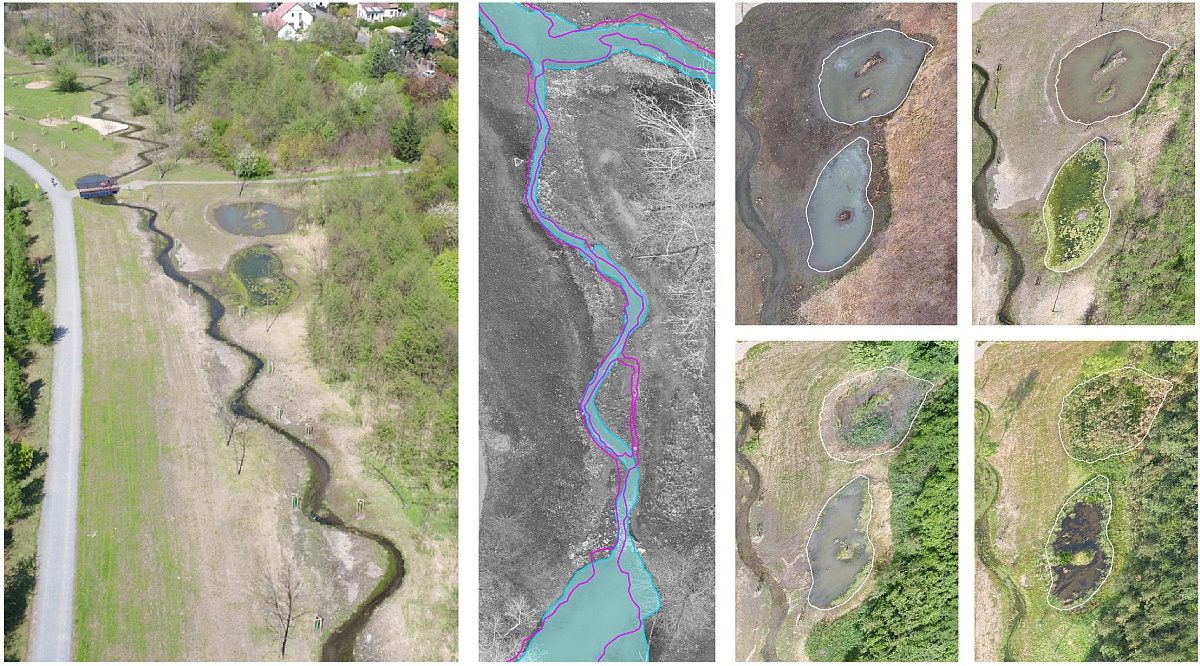
The extraction of the stream line from the orthoimagery was used for the assessment of the compliance of stream restoration with the plan and for the detection of the channel evolution after the restoration. The Vextractor tracing software [
45] was first used to derive the basic shape of the stream line (
Figure 5). The automated vectorization allows deriving either the stream centerline or outline and both options were used for different tasks. The stream centerline was derived for analysis of the compliance of the newly restored stream with the initial plan. The outline was then used for detection of the river line for tracking the changes of the channel since the restoration.
The use of UAV imagery as a basis for vectorization was met with several constraints related to the very high resolution of the data. The delineated stream features were interrupted at locations of in-stream obstacles (
Figure 5), glares on the water surface, or in spots covered by the vegetation, so the extracted stream line requires further manual corrections. The stream line delineation in this study thus combined the automatic delineation with consequent manual corrections. For vectorization, there were selected orthoimages from the spring season, featuring minimum vegetation coverage and low-water-level conditions, enabling good recognition of the stream features.
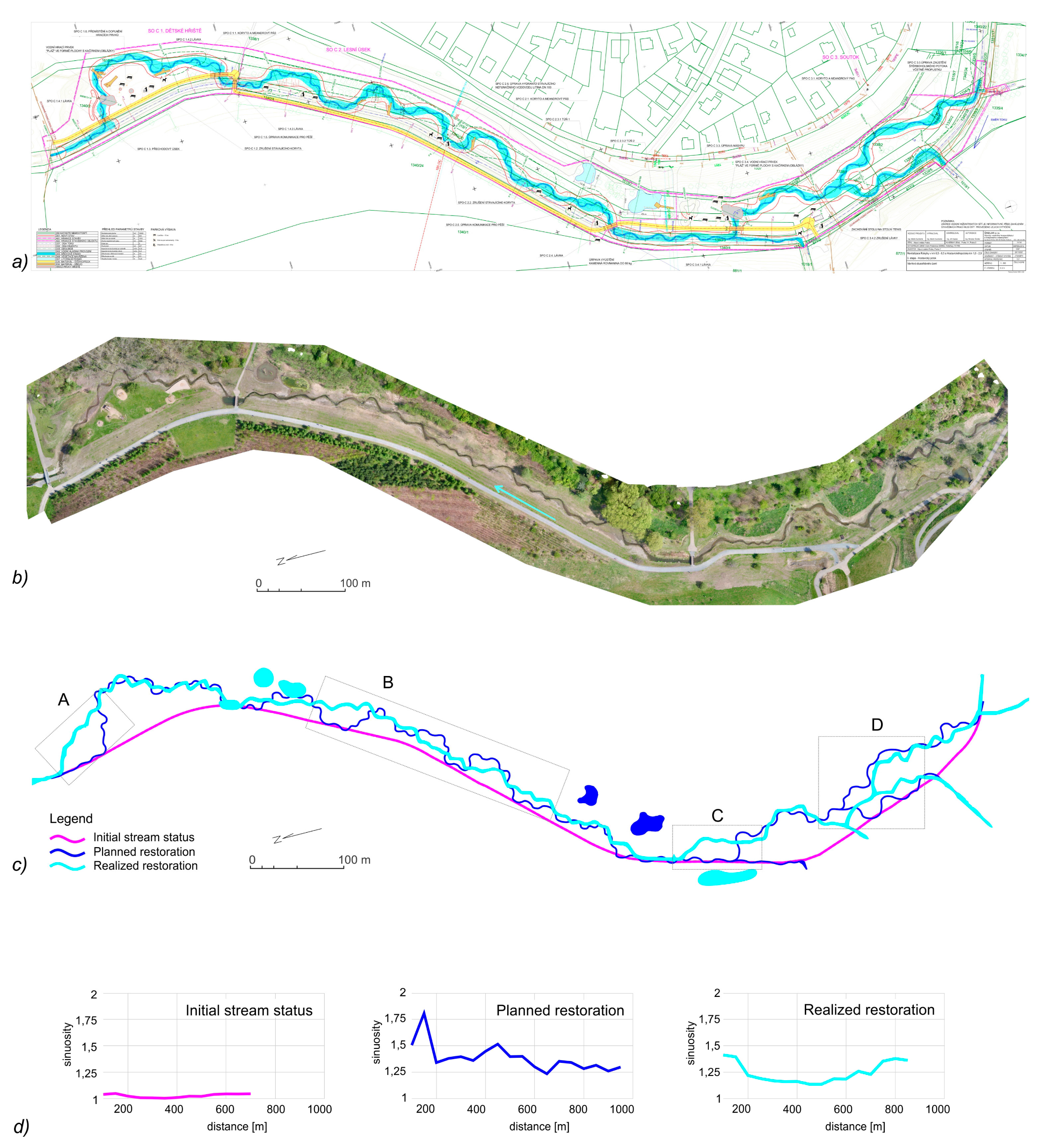
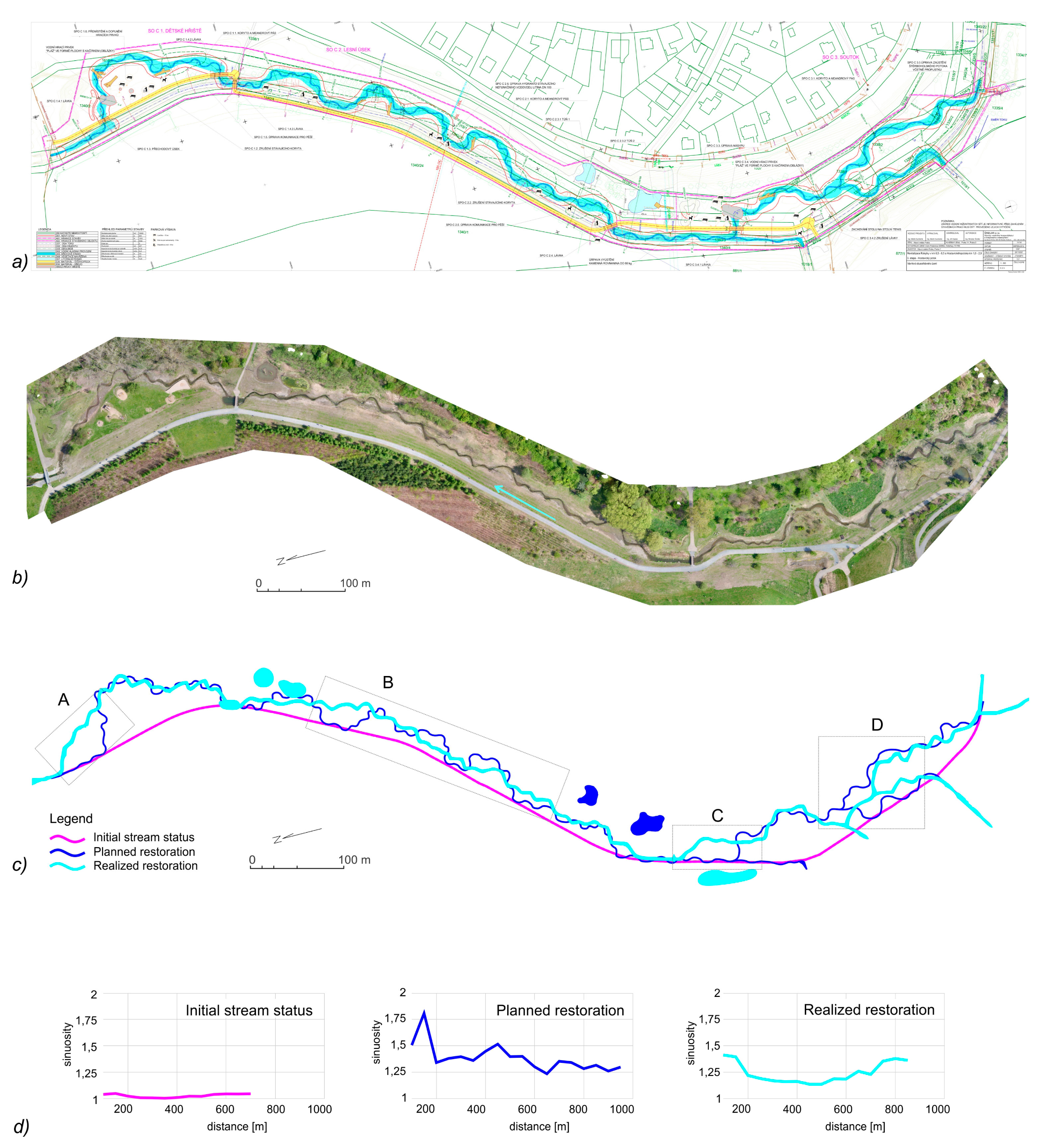
Upon the delineated vector shapefiles, there were basic hydrographic indices of geometric properties of the stream derived and calculated. In particular, there was counted a number of meanders, derived values of mean meander amplitude and wavelength [
46], and calculated index of stream sinuosity, expressed as the ratio of the channel and valley length. Stream sinuosity index was derived for the main stream segment using the RiverMetrics tool in QGIS software [
47]. The calculation is done using a floating window with parameters set to a distance of 200 m and sampling interval of 50 m.
All indices were calculated for three states of the stream system—prior restoration, restoration plan, and realized restoration. The status prior stream restoration and of the restoration plan were acquired as vector geodatabase [
32] and the status of realized restoration was derived by the vectorization of the UAV orthoimagery. As the reference post-restoration status, the imaging campaign from April 2017 was selected, reflecting the stabilized channel after cca 1.5 years since the restoration completion. The spring imagery was selected as suitable for capturing the stream properties in the off-vegetation season, enabling the display of the possible maximum of the stream and floodplain features (
Figure 4).
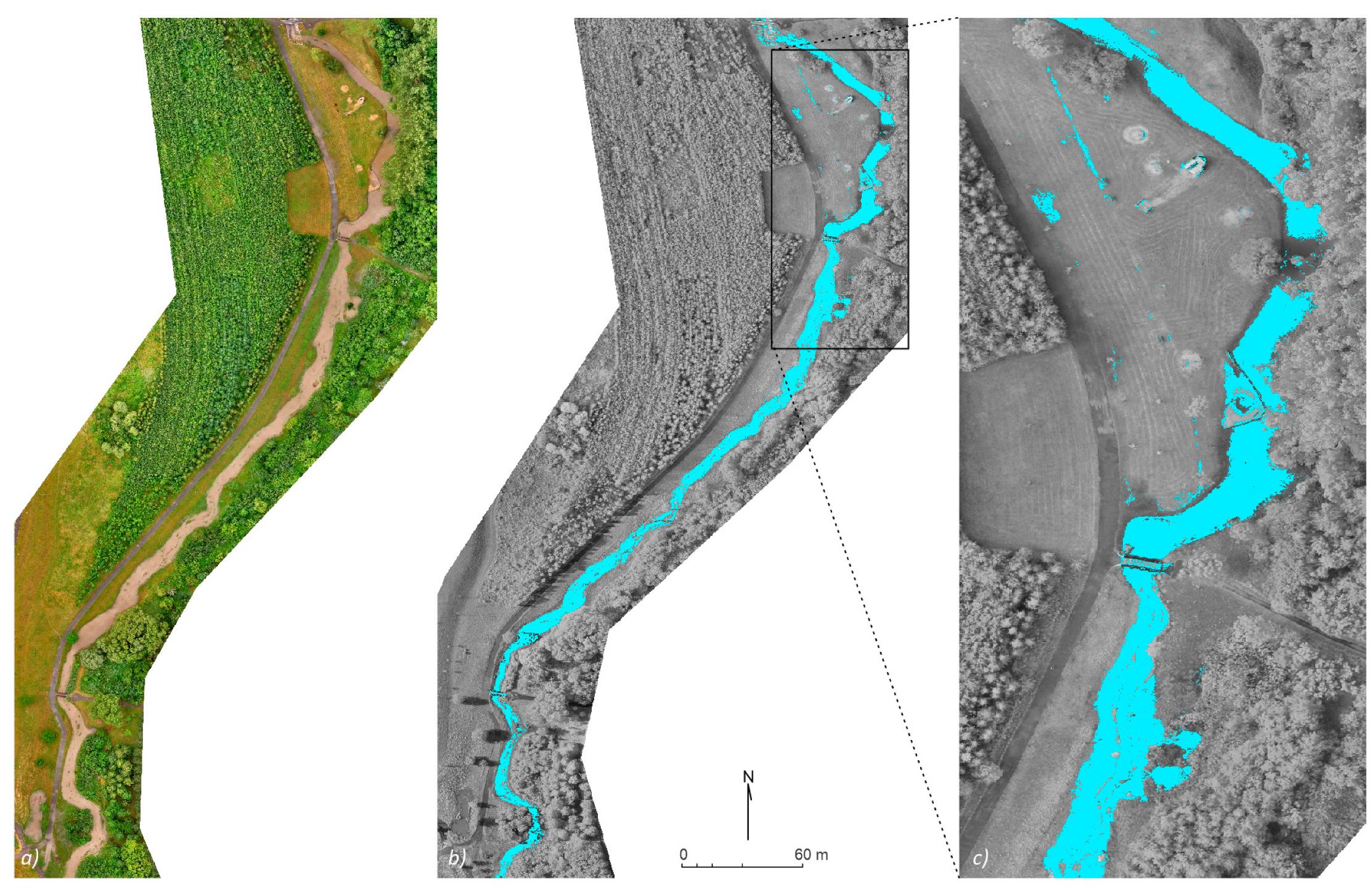
2.5.2. Detection of the Extent of Flood Spill
The detection of a spatial extent of the flood spill from the UAV high-resolution imagery was done by supervised classification, being a basic method in conventional remote sensing [
48]. Compared to the conventional remote sensing techniques, the use of the high-resolution RGB imagery for supervised classification meets with several constraints. The classification of natural phenomena is best performed on a multispectral or hyperspectral imagery, where the objects can be described by multiple bands, mixing the visible (VIS), near-infrared (NIR), or infrared (IR) part of the spectrum [
49], which allows distinction and qualitative assessment of land cover properties [
50].
However, the use of multispectral UAV sensors, although promising, [
51,
52] in practice still remains limited to experimental studies, mostly due to the high costs and demands for skilled operation and data processing. Most of the conventional UAV platforms used for surveying is, hence, equipped with the RGB cameras. This study thus aimed to test the ability of the RGB sensors to provide the information suitable for qualitative analysis and data-driven identification of the features of the riverscape and applicable in restoration management.
Use of VIS bands only for classification is related to known difficulties, as such imagery containing the objects of different functional categories but a similar color response in RGB channels [
10]. To enable the appropriate distinction of the objects, the classified features should have unambiguous spectral response to avoid mixing of the classification categories. In this study, the separability of the features was secured by limiting of the classification area to the mask of the zone of interest, which allowed the exclusion of the features with a similar color response, bringing noise to the classification. Under the mask, the extent of the given features was detected using the supervised classification.
The classification was done in the SAGA GIS software [
53] using the supervised classification module. The training samples of the water level, sized at 60–380 pixels, were selected in five different parts of the study area to cover the potential variability of the reflectance values of the water level in different zones of the study site. Based on these training areas, the supervised classification of only one class (the water level) was performed using the parallelepiped method [
54]. This approach was applied both for the case of detection of water spill and vegetation cover.
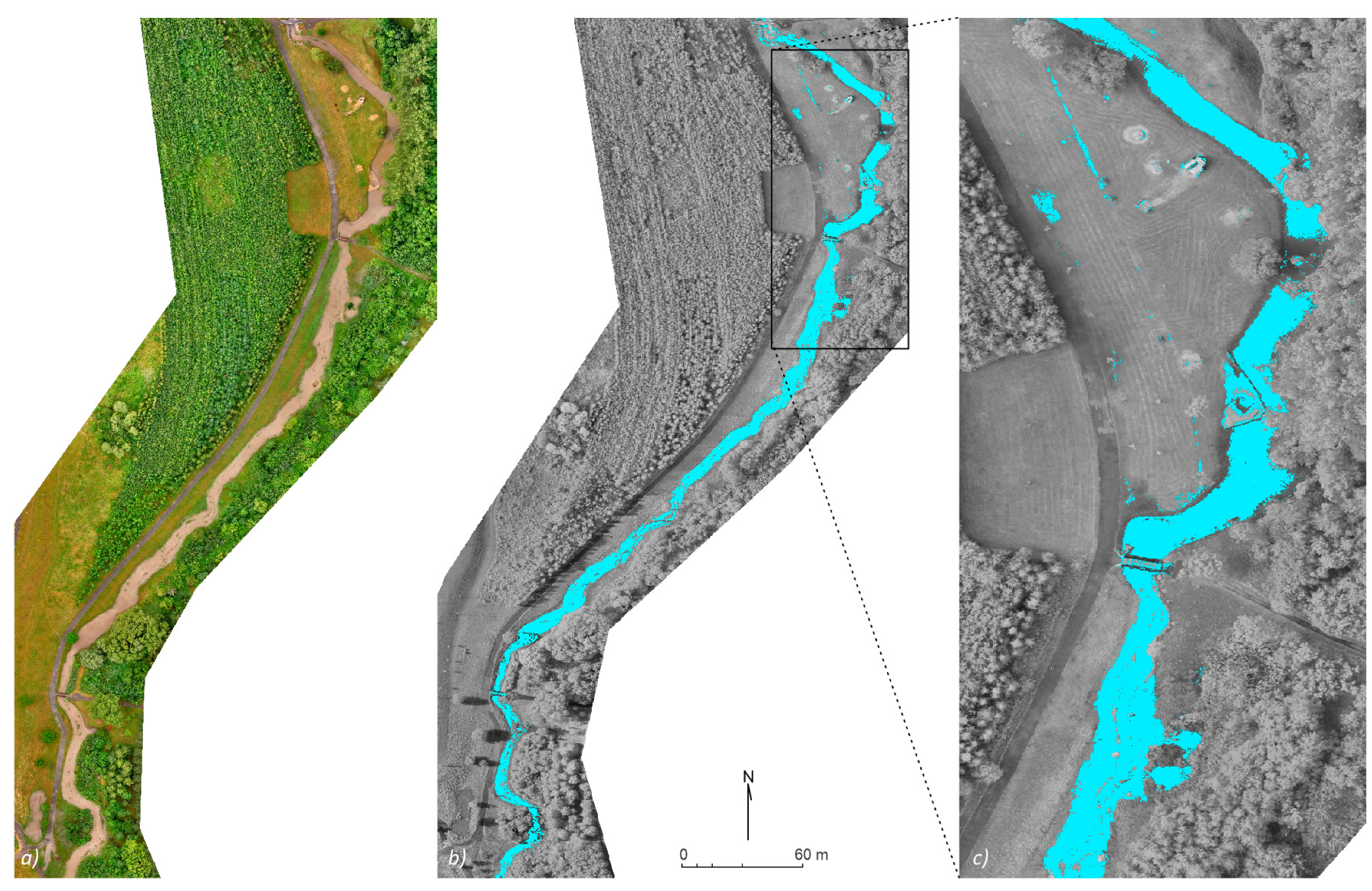
The detection of water spill was tested on the case of a flood in June 2017. The source imaging of the restored stream segment was taken during the crest of the flood, 29 June 2017, at 17:00 CET.
2.5.3. Detection of Changes in Riparian Habitats
Monitoring of riparian habitat changes related to the restoration projects covers a variety of measures, realized in the framework of complex restorations, aimed at restoring the natural biological habitat, increasing biodiversity, or to improve the aesthetic aspects or recreational functions of the stream in the urban environment [
27]. The vegetation changes typically include grassing of the riparian zone, artificial tree plantation, the spontaneous succession of vegetation, but also the overgrowth of vegetation in the oxbow lakes or ponds [
55].
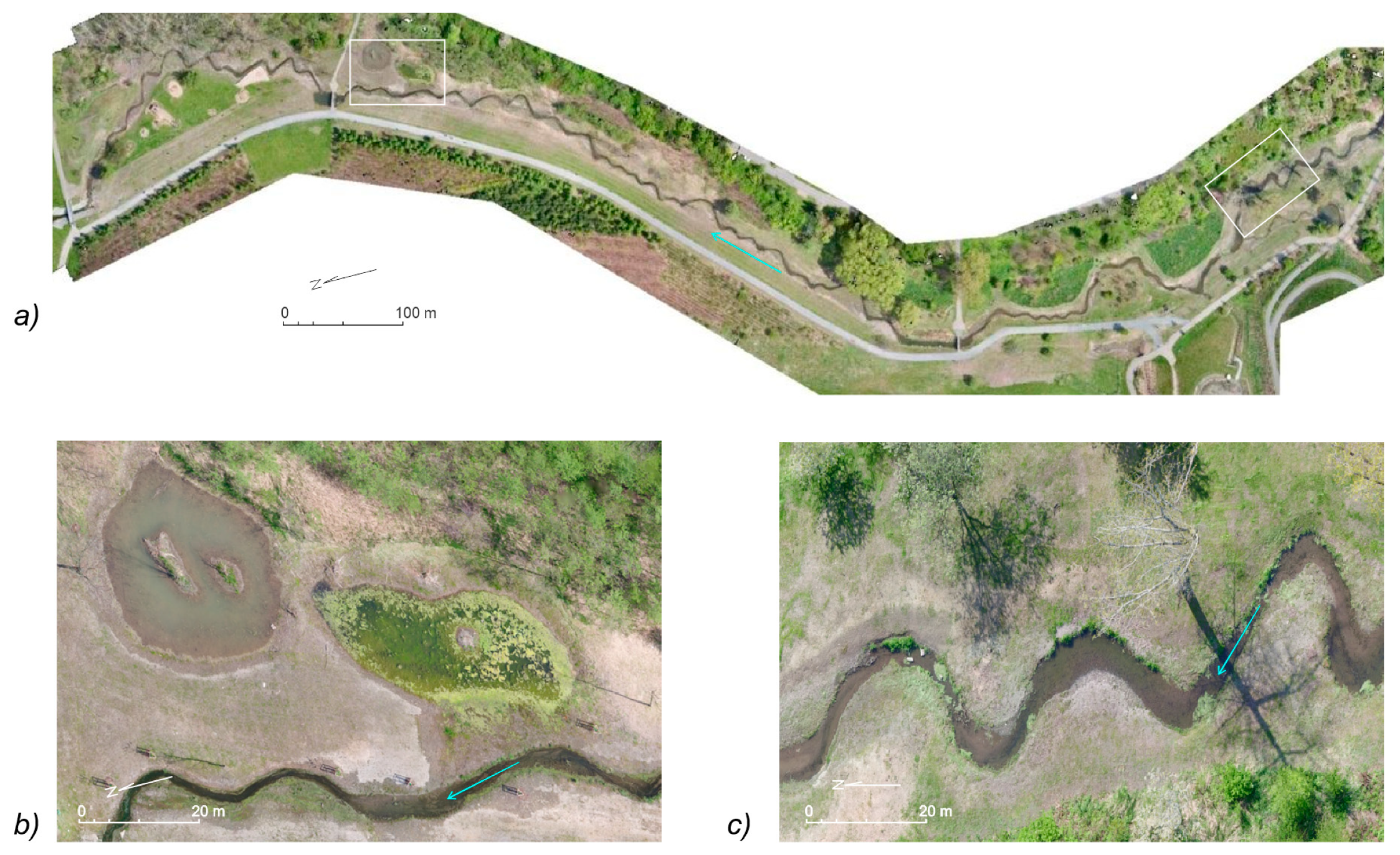
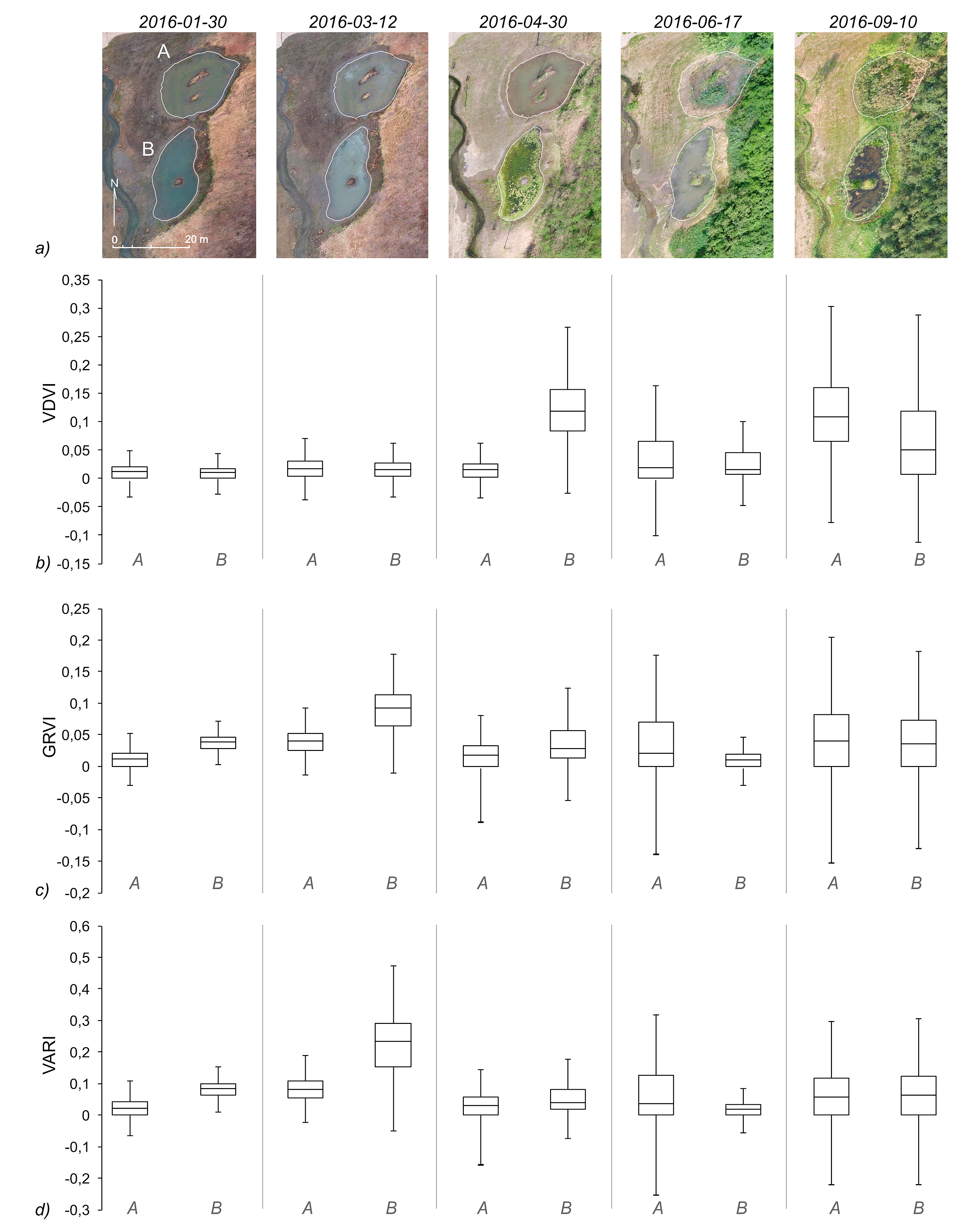
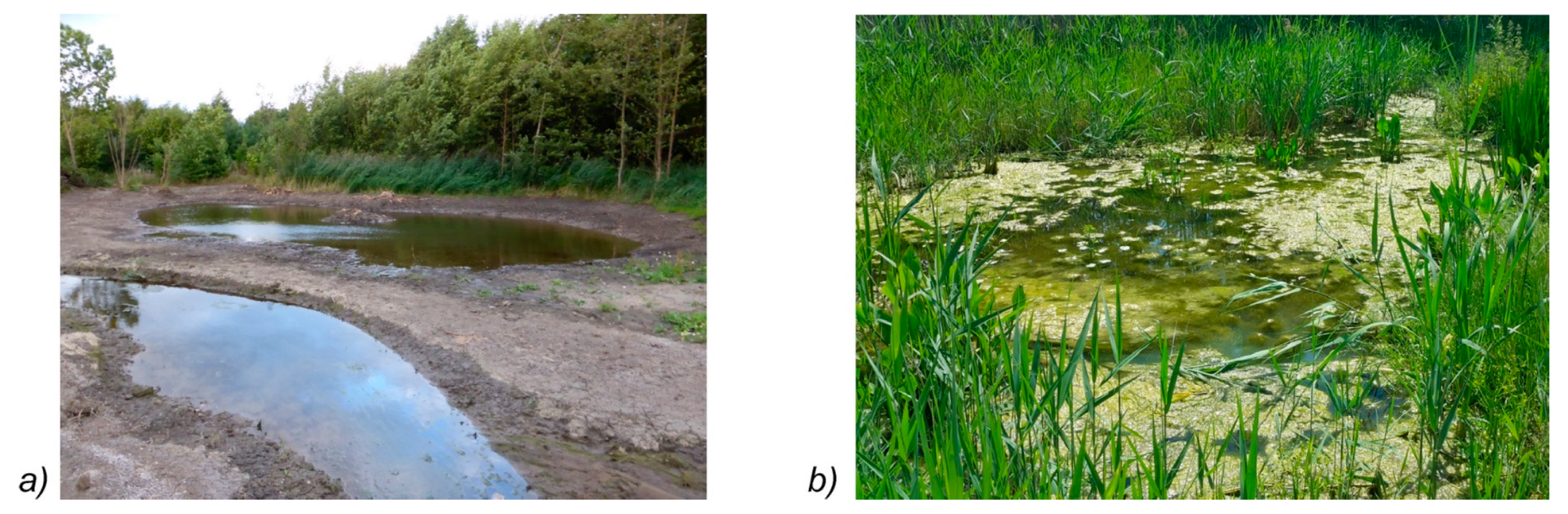
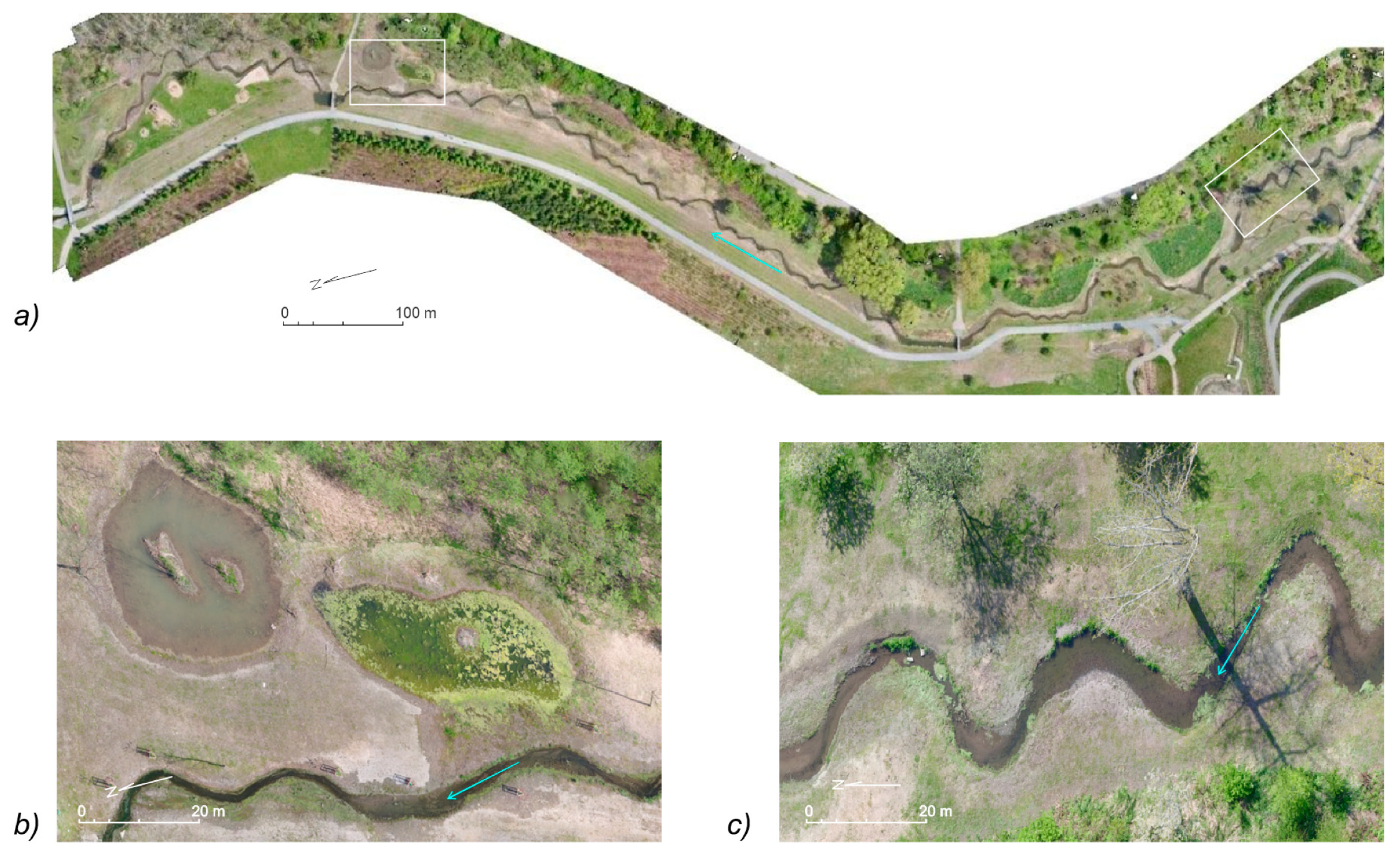
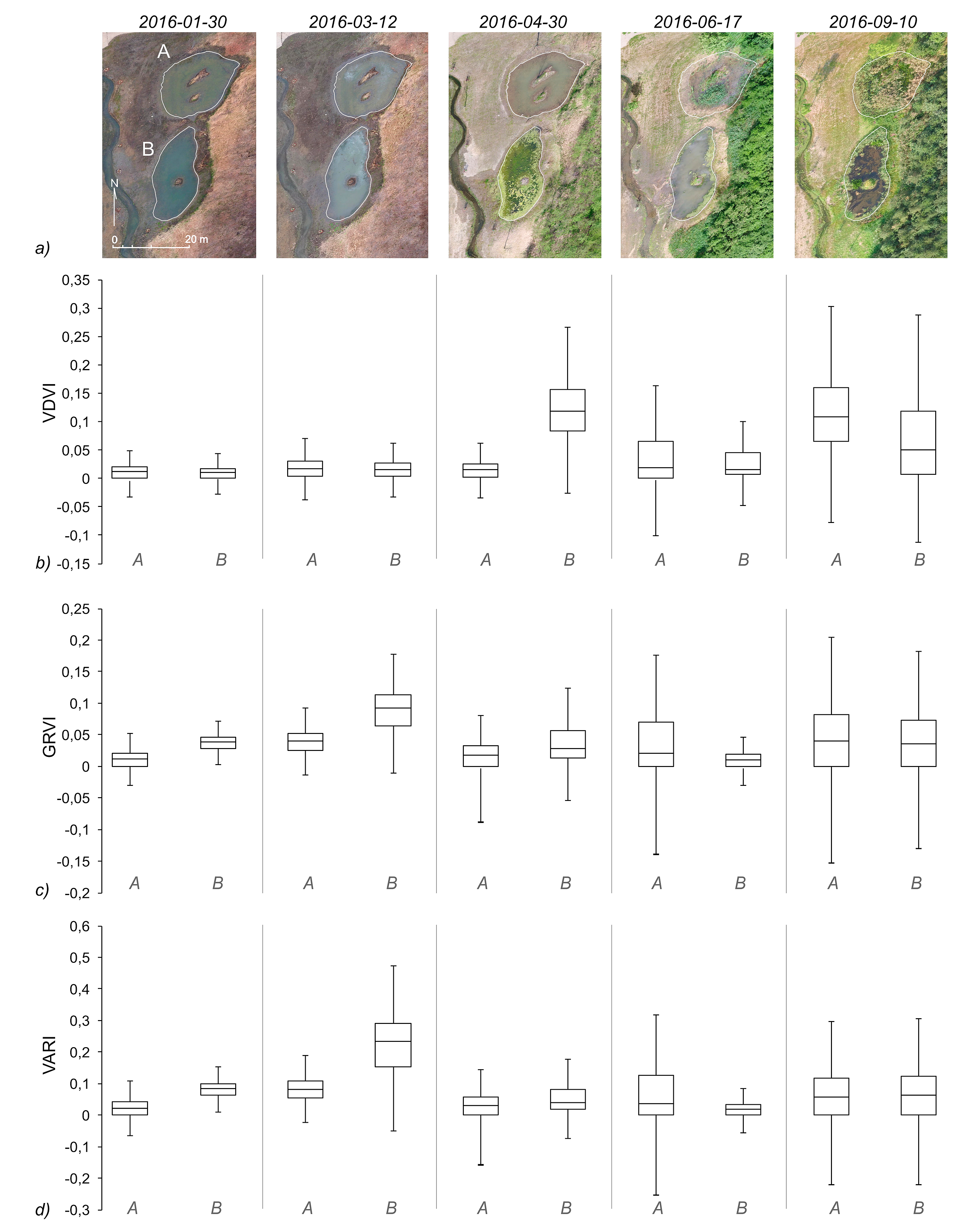
In this study site, the progress of overgrowing and eutrophication in the newly created ponds was tracked based on the UAV imagery. The newly built ponds in the floodplain of Hostavicky brook became subject to spontaneous overgrowing and eutrophication processes since the restoration completion (
Figure 6).
Analysis of the course of these processes was based on the application of the spectral indices, calculated from the RGB orthoimages. The analysis was here limited to the area under the mask, delineated according to the water extent of the new ponds.
For the analysis, there were selected spectral indices, that proved the ability to detect the vegetation status from the RGB spectral bands from the UAV imagery [
56,
57,
58]. In particular, three indices were applied: Green–red vegetation index (GRVI, Equation (1)), which was successfully tested for detection of crop cover biomass from uncalibrated RGB UAV sensors [
59]; visible atmospheric-resistant index (VARI, Equation (2)), that indicated promising performance in the detection of grassland [
60]; and the visible-band difference vegetation index (VDVI) whose accuracy in vegetation extraction was positively rated in Reference [
56]. The indices were calculated as follows:
For all indices, there were calculated values for the spring and summer season following the restoration with five time slices from January until September 2016. For the analysis, the minimum, maximum, mean, and quartile values were calculated for the area under the mask of the extent newly built ponds (
Figure 6). Calculation of indices as well as the grid statistics was done using the SAGA GIS grid calculator and grid statistics tools.
4. Discussion
Three years of UAV monitoring of a post-restoration evolution of an urban stream revealed positive as well as negative aspects of the studied urban stream restoration and also enabled the testing of various aspects of the applicability of the UAV surveying for post-restoration monitoring.
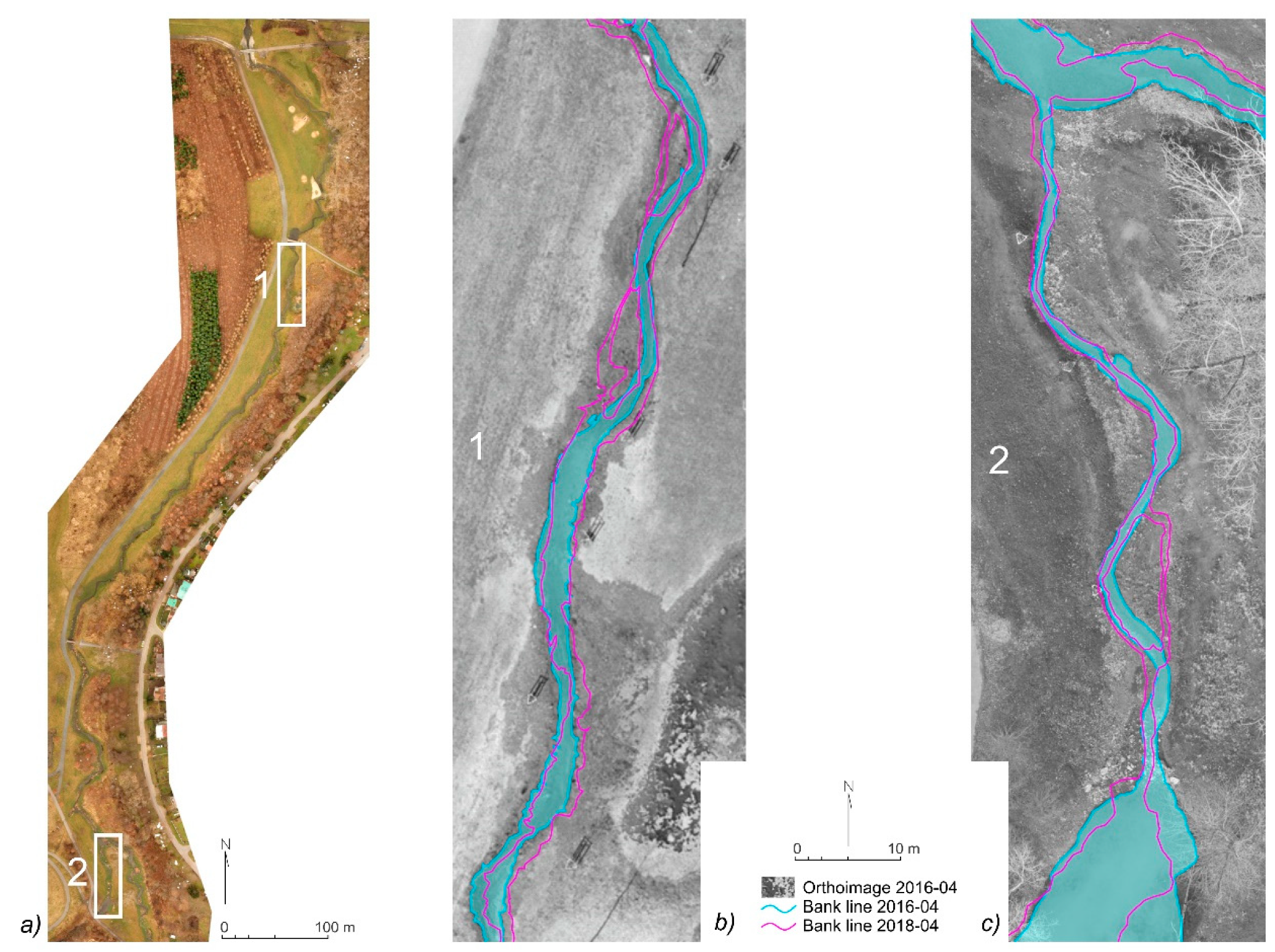
First, the post-restoration monitoring of the Hostavicky brook proved that the basic hydrological and hydromorphological aspects of the restoration were fulfilled. The stream was reshaped from a straight channel with a uniform profile into a meandering stream with a diversity of flow and potential for spontaneous development of habitats. However, the UAV survey revealed that the stream planform of the realized restoration significantly diverged from the plan. The whole meandering belt in several segments deviates from the planned direction (
Figure 7) and the resulting stream has a substantially lower number of meander bends and features lower sinuosity than was planned. The designed wavelength and amplitude of new meanders were not respected in most of the parts of the restored segment. Instead of two artificial ponds, there were three built, but in different locations and with no hydrological connectivity to the stream.
Despite such extensive changes of the stream properties, the spill of the flood in June 2017, belonging to the major known events in the area, indicated the proper hydrological function of the newly shaped stream. The channel was able to keep the flood spill inside the riparian zone and after the flood, the channel remained stable without significant traces of erosion or accumulations except for two minor spots of spontaneous channel development. Hence, from the hydrological point of view, despite the proven discrepancies from the plan, the stream restoration fulfills the basic needs of flood protection in the urban area. The improper design of the artificial ponds with no hydrological connection to the stream, however, led to intense development of eutrophication and reed overgrowing of the ponds since the restoration completion. This phenomenon, tracked since the restoration completion, repeats in subsequent spring and summer seasons.
The revealed problems with not respecting the stream restoration plans are frequently mentioned in the restoration assessment studies [
21,
25,
61]. However, the conventional surveying methods and data sources, e.g., the field survey protocols or aerial imaging [
62,
63], provide limited possibilities for detection of such changes due to the low level of detail and timeliness of the surveys. The very high level of spatial resolution, reliability, and the ability for multitemporal surveys suggests the UAV imaging to be a suitable information source for rapid mapping and identification of discrepancies in realization from the design. Unlike the rapidly growing number of UAVs applications in a natural environment, their use for assessment of stream restoration in the urban landscape is, however, sparse.
Compared to the natural environment, the streams in urban areas feature specific properties. The streams often feature narrow channels, riparian zone constrained by the city plan and infrastructure, and experience heavy modifications due to the intense development in the urban area [
24,
64]. Hence, monitoring and evaluation of the stream restoration projects and evaluation of their progress here require high spatial resolution and precision, enabling monitoring of the physical properties of small streams with high operability, able to track the changes in the urban environment as well as the effects of significant events, typically floods. For such applications, the rapidly evolving UAV technologies open up a highly perspective means of surveying. The unmanned platforms feature high versatility, especially due to the ability to carry different sensors according to the given task [
18,
19,
20,
65]. The 2D and 3D spatial data acquired from the UAV photogrammetry allows the derivation of information about stream channels and floodplains with spatial resolution superior to the conventional data sources [
66]. The orthoimagery, typically featuring a resolution of 2–3 cm per pixel, allows the detection of even the fine details of fluvial features and allows the tracking of the changes of stream properties and fluvial forms [
20].
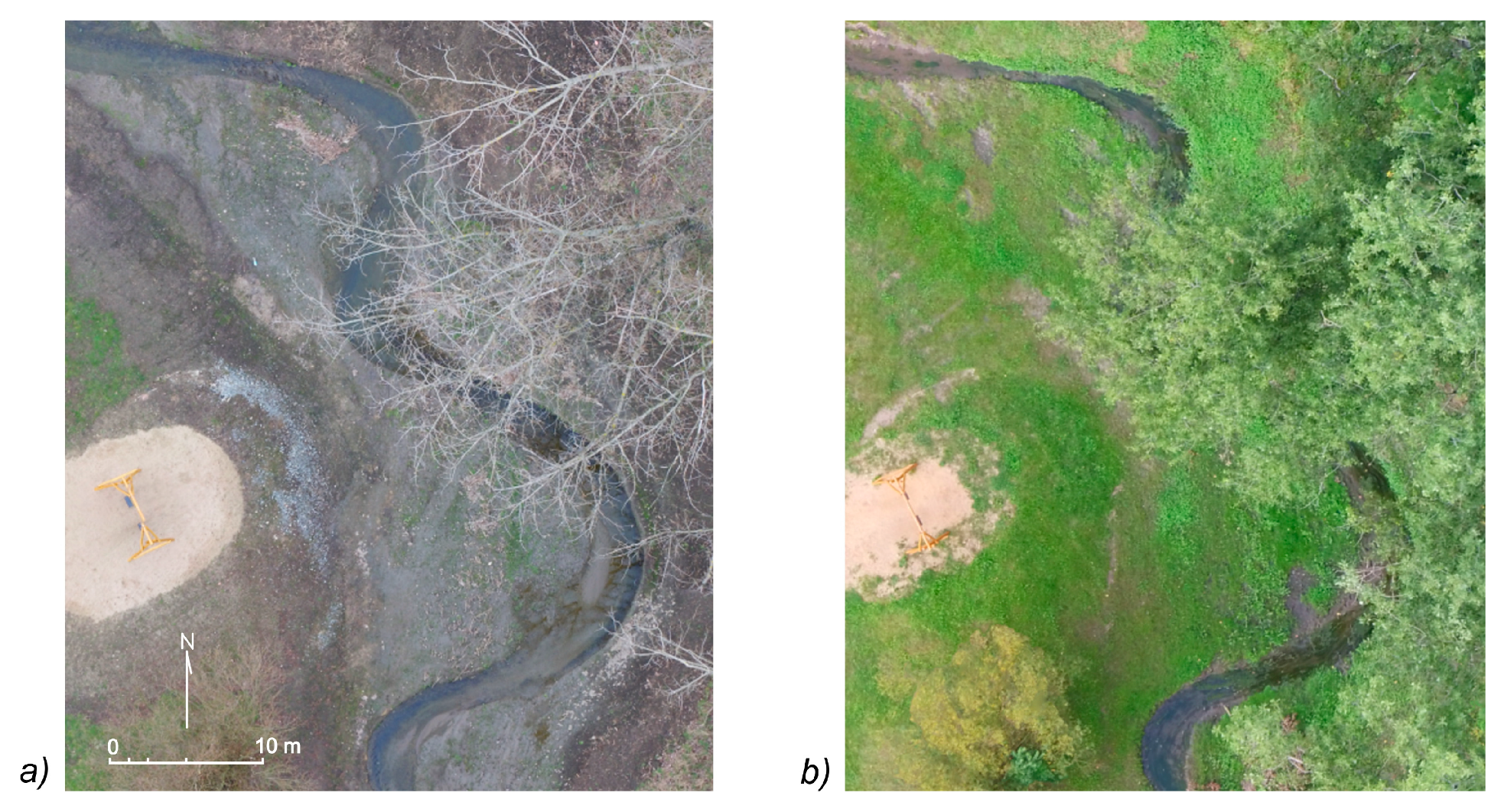
The reconstructions based on UAV imagery remain, however, limited by the optical nature of sensing. The optical sensor cannot record the points that are not directly visible, e.g., the areas obscured by the vegetation or in submerged zones [
17,
67]. In part, such effect can be minimized by the appropriate scheduling of the imaging campaigns to the periods of low water levels and off the vegetation season (
Figure 13).
Very high resolution of the UAV imagery is, for some analytic methods like the automated tracing, bringing new types of issues, uncommon in conventional spatial data. In visible bands, the color variability of the water surface, glares, or the traces of turbulent flow makes the spectral response of the water surface inconsistent. Such variability brings noise to classification and calculation of vegetation indices. For tracing algorithms, it makes it difficult to treat the stream as a consistent unit and to reliably delineate the water body and its features. The same issues apply also to the classification and detection of the vegetation features, where the shadows are significant source of noise for detection and classification of features. In general, the inhomogeneity of the spectral response of the surface is rising with the spatial resolution of the imagery. A low level of generalization results in a similar spectral response of different surface categories [
10]. This problem can be diminished by the use of near-infrared or multispectral sensors [
68,
69]. Although the commercial UAVs are typically equipped with RGB cameras, the advanced platforms, used mostly in research or agriculture use the multispectral or thermal sensors, enabling the analysis of qualitative landscape features [
51,
70]. The multispectral sensors enable distinction of the water level from the riparian zone as well as reliable classification of vegetation cover in the floodplain using methods common in conventional remote sensing [
3]. However, for the routine mapping operations, the use of multispectral UAV sensors still remains limited mainly due to the high costs of the sensors, the need for supporting calibration equipment, and, especially, the demands for skilled specialists for multispectral image processing and analysis.
This study proved that the UAV imagery in visible bands can also be used alonsgside the rapid mapping for a qualitative analysis of the riparian habitats. The spectral limitations of RGB sensors may be partially bypassed by limiting the analysis to the area under the mask of the study spot, which helps to minimize the false detection of features with similar spectral response but of different functional categories. This can be demonstrated by the detection of eutrophication processes in the new ponds using the VDVI index. Here, the reliable application of the indices calculated from visible bands was enabled by the restriction of the analyzed area to the mask of water extent. Testing of three vegetation indices based on RGB imagery proved substantial differences in their reliability. Although all of the indices have proven their performance in the literature, it is apparent that the results from specific case studies [
56,
57,
58] should always be taken with caution and verified in conditions of the given environment. In this study, from the three tested indices, only VDVI index was able to correctly reflect the dynamics of the eutrophication and overgrowth when applied to the selected area under the mask of the ponds and is thus promising for applications in tracking the riparian processes. On the contrary, in the conditions of riparian vegetation in mid-latitude small urban stream, both GRVI and VARI indices were unable to correctly track the eutrophication, nor the overgrowth of the ponds.
One of the critical aspects for the success of the restoration monitoring is the appropriate frequency and scheduling of the monitoring campaigns [
62,
71]. In this study, the imaging was set to a bi-monthly period for three years since the restoration works. Appropriate setting of the imaging interval is essential to keep a balance between the need to capture the changes and possible burden by excessive data. The three years of monitoring proved that in the case of successful restoration, the bi-monthly interval is relevant in the initial period of restoration to verify the stability of the new channel and the start of succession processes in the floodplain. Since then, the frequency of monitoring could be set to 1–2 campaigns per year, scheduled in the off-vegetation season. Such monitoring frequency, eventually completed by ad-hoc imaging after significant events, e.g., floods or construction works, would also correspond to the standards for hydromorphological mapping [
71,
72]. The ad-hoc campaigns, launched after significant events with the potential to affect the stream morphology, typically floods, can help to assess the course of the events, to study the response of the restored channel and its resilience to the events of a given magnitude. For such ad-hoc rapid mapping campaigns, the operability of UAV photogrammetry is unparalleled, compared with the conventional survey techniques.
5. Conclusions
Three years of UAV monitoring of an urban stream after a complex restoration enabled the assessment of the post-restoration evolution of the channel and floodplain and to test the potential of this technology to be used for stream restoration monitoring.
UAV imagery proved to be a reliable source of detailed spatial information, applicable for the assessment of the post-restoration changes in stream and floodplain. In particular, the RGB orthoimagery was successfully used for semi-automated delineation of stream line, for supervised classification of the extent of water spill during a flood, classification of the extent of grassing, as well as for calculation of spectral indices, enabling the tracking of the eutrophication processes in newly built ponds. Performing the classifications under the mask of the given studied phenomena enabled the diminishment of the major limitation of RGB imagery—the mixed spectral response of the qualitatively different types of land cover. This approach was tested with success in the cases of classification of the extent of grassing, detection of water level during the flood, as well as for calculation of spectral indices for tracking the eutrophication. Testing of different spectral indices on RGB imagery for tracking the eutrophication processes in new ponds proved the good sensibility of the VDVI index, which was able to reliably reflect the changes in eutrophication and vegetation overgrowing of the ponds.
In the study site, UAV monitoring revealed the substantial discrepancies between the realized restoration and the plan. The realized restoration is significantly less complex, with fewer meander bends, lower overall sinuosity, and deviations of the course of the meandering belt from the approved plan. It also proved that the new ponds were built in unplanned locations and without hydrological connection to the stream. The remodeled floodplain was the subject of intense vegetation succession, both planned and spontaneous, and heavy eutrophication in the new shallow ponds was detected.
Despite the deviations from the plan, the restored stream channel has proven stability and resistance to peak flows, with only marginal traces of the spontaneous evolution of the channel. The analysis of the extent of the flood spill during the flash flood in June 2017 indicated that the restored meandering channel of the watercourse is able to capture the flood event corresponding to a five-year flood while keeping the water spill inside the riparian zone.
This study proved that the UAV technologies represent a survey tool with unique features, applicable for the monitoring of stream restoration projects. The UAV surveys can benefit from the very high resolution of the spatial data, the ability to maintain multitemporal monitoring, and suitability of the data for further quantitative and qualitative analysis. With the operability and cost efficiency of surveys, UAV technology should be considered as a standard survey tool when designing stream restoration monitoring plans.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}