In this section, we analyse the performance of the VLP system. Unless specified otherwise, we consider that both the area where the receiver is evaluated, i.e., the receiver area, and the ceiling area have dimensions
, with the latter located parallel and at a distance
above the first, with
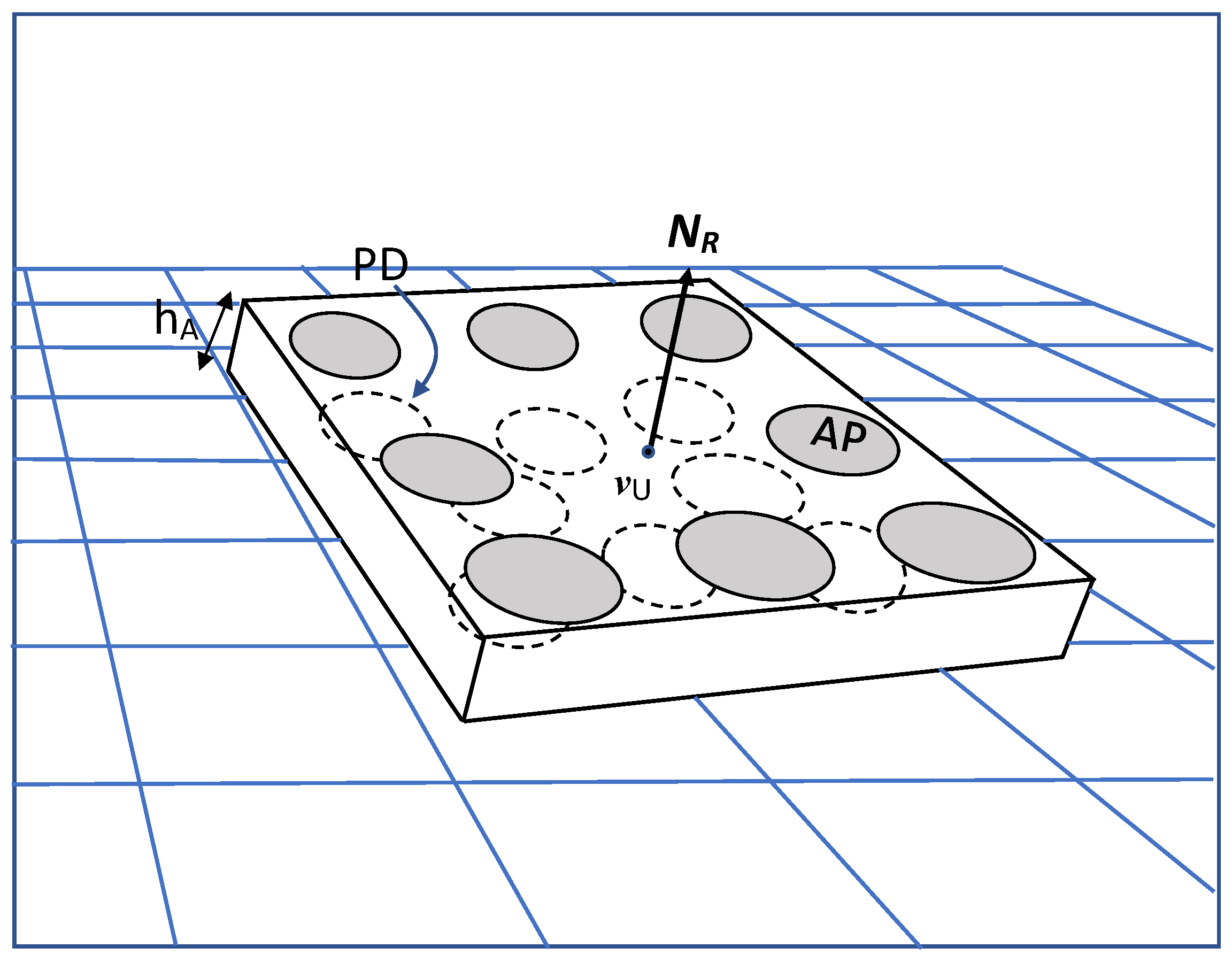
. We assume that the receiver contains
REs. The relative coordinates
of the aperture centres with respect to the reference point
of the receiver are given by
, where
,
and
, with
and
1 mm. The horizontal distance
between the apertures, i.e., five times the vertical distance between the apertures and the PD, ensures that the only light that reaches the PD is the light coming through its own aperture. Furthermore, we assume that the coordinates
of the PD centres, relative to the aperture centres, are given by
, where
, with
and
. The apertures and PD are positioned in such a way that they provide a large FOV to collect the light from a large number of different VLP-LEDs. To determine the level of the noise spectral density, we assume a background spectral irradiance
5.8
W/cm
2nm [
18] and PD responsivity
0.4 mA/mW for all
[
26]. The optical filter only passes visible light in the range 380 to 740 nm, resulting in an optical bandwidth of
360 nm. We assume that the signals transmitted by the LEDs are confined to the bandwidth
MHz, and we observe the signals during an interval
ms.
In our analysis, we investigate the impact on the VLP system from relevant aspects such as the number and position of LEDs used as VLP transmitters.
4.2. Optimal Ratios
We first analyse the impact of the choice of and on the positioning performance. To this end, we assume the total number of VLP-LEDs is constant, that is, , and consider different combinations of and : with and , . We assume that the area has fixed size m2, but we consider rectangular areas with different and dimensions, i.e., with m and m, .
To evaluate the positioning accuracy, we consider the spatial average of the square root of the CRB, i.e.,
, and the normalised standard deviation
. While the first performance measure,
, serves to find the configuration resulting in the most accurate average positioning performance, the second performance measure,
, is an indication of the spatial uniformity of the result. For every combination of the above-mentioned area dimensions and VLP-LED layouts, we determine the optimal values
and
that result in the minimum value of
. The resulting
is shown in
Figure 5a. Similarly, we determine the values
and
that result in the lowest
. The resulting
is shown in
Figure 5b.
Although the optimal values of
and
differ for the two figures, because they optimise different objective functions, we can observe in
Figure 5a,b that, for a given area dimension
, the VLP-LED layout with
results in the smallest
and
. In other words, ignoring the presence of the scaling factors
and
, this corresponds to an equal spacing between the VLP-LEDs in the
and
direction, respectively:
. This brings us to a first rule of thumb. Equation (
15) shows us that
the number of VLP-LEDs in the and direction should follow the dimensions of the receiver area.
4.3. Optimal Visible Light Positioning Light-Emitting Diode Spacing
In the previous discussion, we determined, for a given number of VLP-LEDs, the number of VLP-LEDs in each direction, i.e.,
and
. Now, we will further investigate the optimal spacing between VLP-LEDs, where the distance between VLP-LEDs in the
direction,
, and in the
direction,
, are derived from (
14), resulting in
and
. To this end, we first restrict our attention to the case where the receiver area is square and the VLP-LEDs are placed in a square grid:
,
,
and
. We will generalise later in this section the results to the rectangular layout. We consider three receiver areas with different sizes, i.e., with
,
and
m. The scaling factor
with
, influencing the distance between neighbouring VLP-LEDs, will be optimised.
In this optimisation, we use as an objective function the spatial average
over the
m
2 area of a receiver placed at a vertical distance of
m below the ceiling. First, we plot
as a function of the scaling factor
for different values of
. As expected, the results in
Figure 6a show that increasing the number
of VLP-LEDs leads to a lower rCRB, and thus a better positioning accuracy, as more information is available to estimate the user’s position. Further,
Figure 6a reveals that the positioning accuracy first improves when
increases but deteriorates after reaching a minimum. This can be explained as follows. When
is small, all VLP-LEDs are concentrated above the centre of the receiver area, implying that the centre is well lit, but the edges of the area receive less light due to distance-dependent attenuation and relatively large radiation and incident angle. Hence, although the position of a receiver can be determined accurately if it is located in the centre of the receiver area, the positioning accuracy will be strongly reduced when the receiver is near the boundary of the area because of the larger distance and angle between the receiver and the VLP-LEDs. Obviously, this will also have a negative impact on the uniformity
of the positioning performance, see
Figure 6b. By increasing
, the positioning accuracy near the edges will improve due to the better channel response for the closest VLP-LEDs, improving both the average positioning accuracy and the uniformity. However, when the distance becomes too large, the VLP-LEDs furthest away from the receiver start to drop out of the FOV of the receiver, implying that less information is available to determine the position, resulting in a degradation of the accuracy. The effect of
on the position accuracy is greater when
increases as the incident and radiation angles, as well as the distance between the VLP-LEDs and the receiver, increase when the area becomes larger. In
Figure 6, we can observe that, in most cases, the optimal value of the spacing
for
corresponds more or less to the optimal spacing for
, and, in the cases where there is a discrepancy between the optimal spacing for optimising
and
, the normalised standard deviation
is relatively small. Therefore, in the remainder of this section, we concentrate on the optimisation of
.
Let us look more closely at the optimal scaling factor
and the corresponding optimal distance between the VLP-LEDs. In
Figure 7a, we determine the optimal scaling factor
that minimises
as a function of
. We observe that, when
m, the scaling factor
, i.e., the VLP-LEDs must be placed near the edges of the area. Due to the small area, the distance between the receiver and the VLP-LEDs is limited, as well as the radiation and incident angle, implying that the channel gain will be good for all positions of VLP-LEDs and the receiver. As the Fisher information matrix becomes closer to singular when
is small (as the measurements from the different VLP-LEDs will be correlated strongly because the VLP-LEDs are approximately co-located), the VLP-LEDs must be placed apart as far as possible. On the other hand, when
m, we observe that
becomes approximately independent of
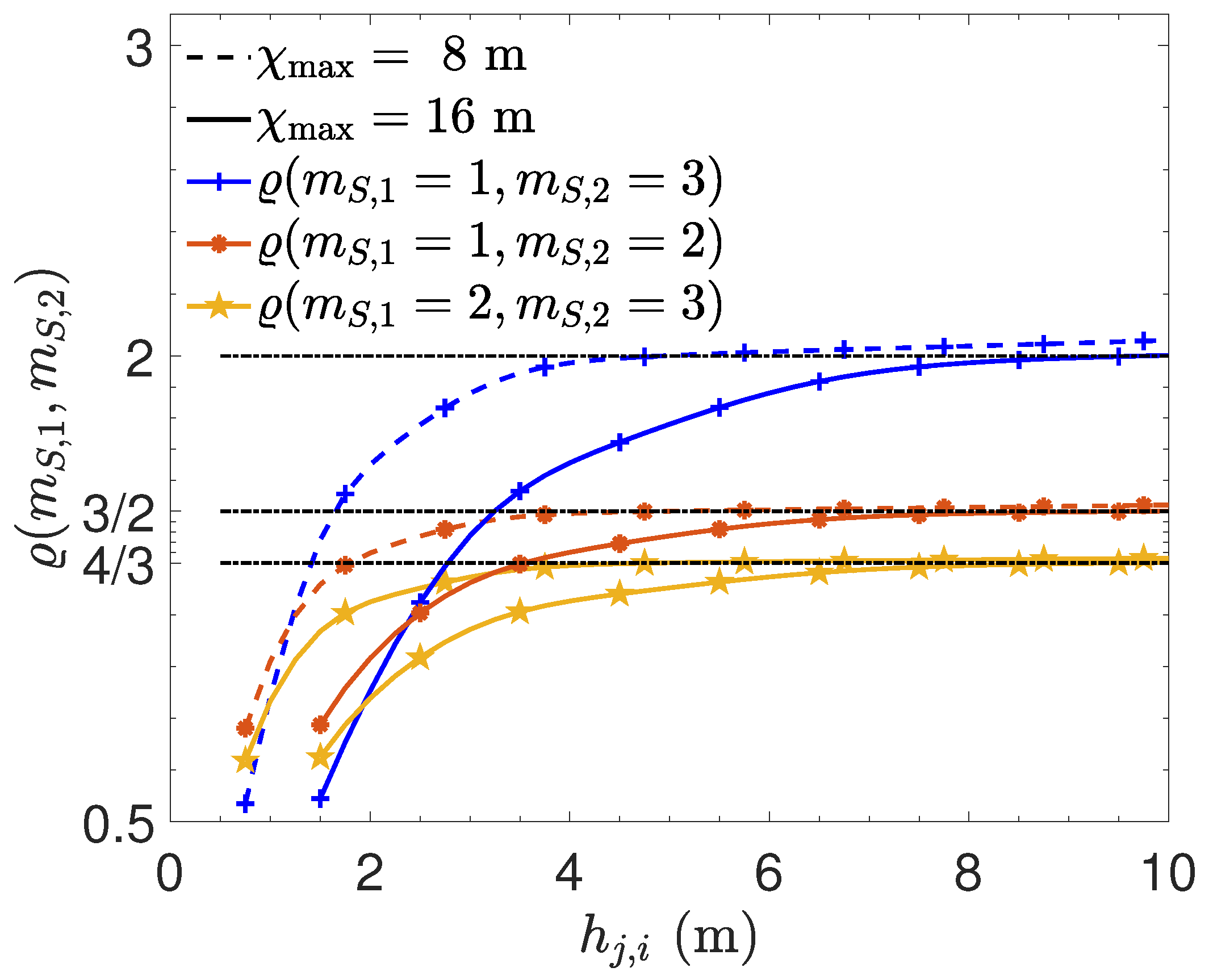
, and the optimal distance increases with the increasing number of VLP-LEDs. In
Figure 7b, we show the ratio between the
for the cases considered in
Figure 7a, and we compare the results with the level
. From these results, we find that the optimal spacing
can be approximated by
which corresponds to
To evaluate the positioning performance for this approximation of the optimal spacing, we compare the
for the spacing
(
16) with the performance for the true optimal spacing
from
Figure 7. The results, shown in
Figure 8, reveal that the approximated spacing (
16) provides a close-to-optimal positioning performance, even for small values of
. This can be explained by evaluating
Figure 6a; for small areas,
is essentially independent of
, implying that, for the spacing (
16), the resulting
will be close to the minimum.
In the above analysis, we restricted our attention to the case of a square receiver area. We now extend the results to the rectangular areas discussed earlier in this section. Using Equation (
17), we extrapolate the approximation to
and
where
and
. Comparing the approximation (
18) with the optimal values of
for the different scenarios considered in
Figure 5a, we notice that
closely approximates all the values obtained for
. However, for the
dimension, a larger deviation occurs between the optimal scaling factor
and the approximation
for areas with a small
. However, this does not imply that the approximation is not useful, as, similarly to the square area, when
,
or
is small, the
becomes largely independent of
,
or
, respectively. Hence,
the approximations (17) and (18) can be used as a general rule of thumb to determine the optimal spacing between the VLP-LEDs.
4.4. Average Accuracy Level
Now that the optimal placement of the VLP-LEDs has been determined, we are interested in finding the minimum number of VLP-LEDs required to obtain a given average positioning accuracy. To this end, we show in
Figure 9 the positioning accuracy that can be obtained with
VLP-LEDs in square areas with dimensions
for different Lambertian orders and transmitted optical power. From these figures, we can determine the minimum number of VLP-LEDs that results in
for areas up to
m
2. The figures reveal a linear relationship between the minimum
to obtain
and
. This linear relationship can be expressed as
where the slope
and bias
depend on the system parameters
,
and
and on the wanted accuracy level
. Our simulations reveal that the bias
is very close to zero for all considered scenarios, implying that we can simplify (
20) to
This behaviour is expected because the positioning performance is mainly determined by the distance between the receiver and the nearest VLP-LEDs, indicating that, if the size of the area increases, the number of VLP-LEDs should increase accordingly to keep this distance between the nearest VLP-LEDs and the receiver constant. Combining this linear behaviour between
and
with (
16), it follows that the optimal spacing
is constant for a given accuracy level and equal to the inverse of this slope. In the following, we investigate the dependency of the slope
on the system parameters. Let us first evaluate the slopes for the cases shown in
Figure 9. The slopes of the curves and the resulting optimal spacing are listed in
Table 2.
Comparing
Figure 9a (
and
W) with
Figure 9b (
and
W) and the slopes of the curves, given in
Table 2, we observe that, if we halve the transmitted optical power, this results in the curve
cm in
Figure 9a being equivalent to the
cm in
Figure 9b. In general, if we increase the transmitted optical power with a factor
, the side
of the square area may increase with the same factor
to obtain the same average positioning accuracy (of course, this is provided that the scaling factor
is small enough that the VLP-LEDs do not disappear out of the field of view of the receiver and the receiver does not fall out of the field of view of the VLP-LEDs) with the same number of VLP-LEDs. The explanation can be found by verifying Equations (
11) and (
13); the rCRB is proportional to
, so increasing the optical power
will reduce the rCRB with the same factor. In other words, the slope
in (
20) will be a function of the product
.
In
Figure 9c (
and
W), we change the Lambertian order so that
is doubled compared to
Figure 9a (
and
W). The channel gain (
3) depends on the Lambertian order through the prefactor
, but also through the exponent of the cosine of the incident angle
. This incident angle depends on the position of the receiver, implying that the dependency of the rCRB on the Lambertian order is more complex than on the optical power. However, it is expected that, when this incident angle is sufficiently small, we can approximate
. In that case, the channel gain will depend on
through the prefactor
only, implying that the rCRB will behave approximately proportionally to
. This will be the case when the height
is sufficiently large as, when the height increases, the incidence angle will become smaller. In
Figure 9c, the rCRB only roughly reduces by factor
, indicating that the incident angle is not small enough for this approximation to hold. In general, the slope
in (
20) will be a complicated function of the Lambertian order
.
In
Figure 9a–c, we keep the same height of VLP-LEDs, i.e.,
m. Changing this height will have an impact on
that is more complex than when changing the optical power or Lambertian order as this height is directly related to the
coordinate
of the receiver position, that is,
. This can be observed in
Figure 10, where we show the impact of the receiver height
on the
for
VLP-LEDs with Lambertian order
and optical power
W and for two different receiver areas
m. As predicted by our analysis of
Figure 9a–c, we observe in
Figure 10 that, for a given
, the blue and red curves are parallel; doubling the transmitted optical power results in a reduction in the rCRB by a factor of two. In addition, we stated that the rCRB is approximately proportional to
when the incident angle is small. Hence, for a large
, we expect that the yellow curve will become parallel to the blue curve. This effect indeed can be observed in the figure. This is further analysed in detail in
Figure 11, where we show the ratio
as a function of height for
and
m. It can be observed that the curves converge to a constant for a sufficiently large
. This constant is slightly larger than
as
for
, implying that the overestimation of the channel gain (underestimation of the rCRB) when approximating
is larger for
than for
. For a given
, the height
at which
converges is approximately independent of the value
of the Lambertian order. Comparing the height
for
m and
m, we find that the height
for
m is twice the height
for
m, that is, the height of convergence scales with
. To explain this, let us consider the following scenario. Consider the four LEDs surrounding the receiver and assume that the receiver is located in the centre of these four LEDs. Further, suppose that the LEDs are optimally spaced, that is, their spacing is
(
16). Then, the incidence angle
is for the four considered LEDs
. Inserting
m for
m (
m for
m), the resulting incidence angle for
approximately equals
. We evaluated the convergence height for various values of
and
and found, for all cases, that convergence occurs when the incidence angle is in the interval
. This corresponds to a height
, where
, i.e., when the height is greater than
times the optimal spacing
between the VLP-LEDs, the rCRB will be approximately proportional to
.
Until now, we have concentrated on the relative differences between the curves in
Figure 10. Now, we will discuss the behaviour of the
as a function of height
. The figure shows that, for a small
, the
first decreases as a function of
, and, after reaching a minimum, it increases again. This is explained as follows. For a small
, the receiver sees only a limited number of LEDs because it falls out of the FOV of most LEDs. By increasing the height, the receiver will gradually see more LEDs, so more information will be available to determine its position, resulting in an improvement of the positioning accuracy. However, at some point, the additional information that is obtained by detecting more LEDs will be outweighed by the reduction in the channel gain because the receiver is further away from the LEDs. As the signal-to-noise ratio reduces as a result of the smaller channel gain, the position accuracy will degrade. For a large
, the rCRB increases approximately proportionally to
. This follows from Equation (
3); when
is large,
, and, for the nearest LEDs,
, implying that the channel gain approximately is proportional to
, which leads to the rCRB being proportional to
.
In conclusion, the rCRB scales with the transmitted optical power , and, when the incidence angle (for the four closest LEDs) is sufficiently small, the rCRB is proportional to and . This will occur when , where with and is the optimal spacing between the LEDs.
Although the above analysis gives us insight into the behaviour of the rCRB as a function of the system parameters, we are not able to find an accurate closed-form expression for the slope
in (
21) as a function of the system parameters
,
and
and accuracy level
. Therefore, we will derive a lower and upper bound on the minimum number
of VLP-LEDs.
To find a lower bound
in
, i.e.,
, we analyse the FOV of the receiver. To estimate the receiver position, at least one VLP-LED must be in this FOV, otherwise the Fisher information matrix will become singular. Let us focus on the receiver position furthest from the centre of the area, i.e., in a corner, and consider the VLP-LED closest to the receiver. This VLP-LED will be in the FOV when the incident angle
is smaller than the FOV angle
, i.e.,
Assuming the LEDs are optimally spaced, i.e.,
, the horizontal distance between the LED and the receiver in this scenario equals
, which is related to the incident angle through
, leading to the lower bound
For the receiver structure specified at the beginning of the numerical results section,
. The slope
for this lower bound is independent of
and
. As (
24) is a strict lower bound on
, which implies that the slope
is a lower bound on the true slope
, it is expected that the lower bound will become less tight when
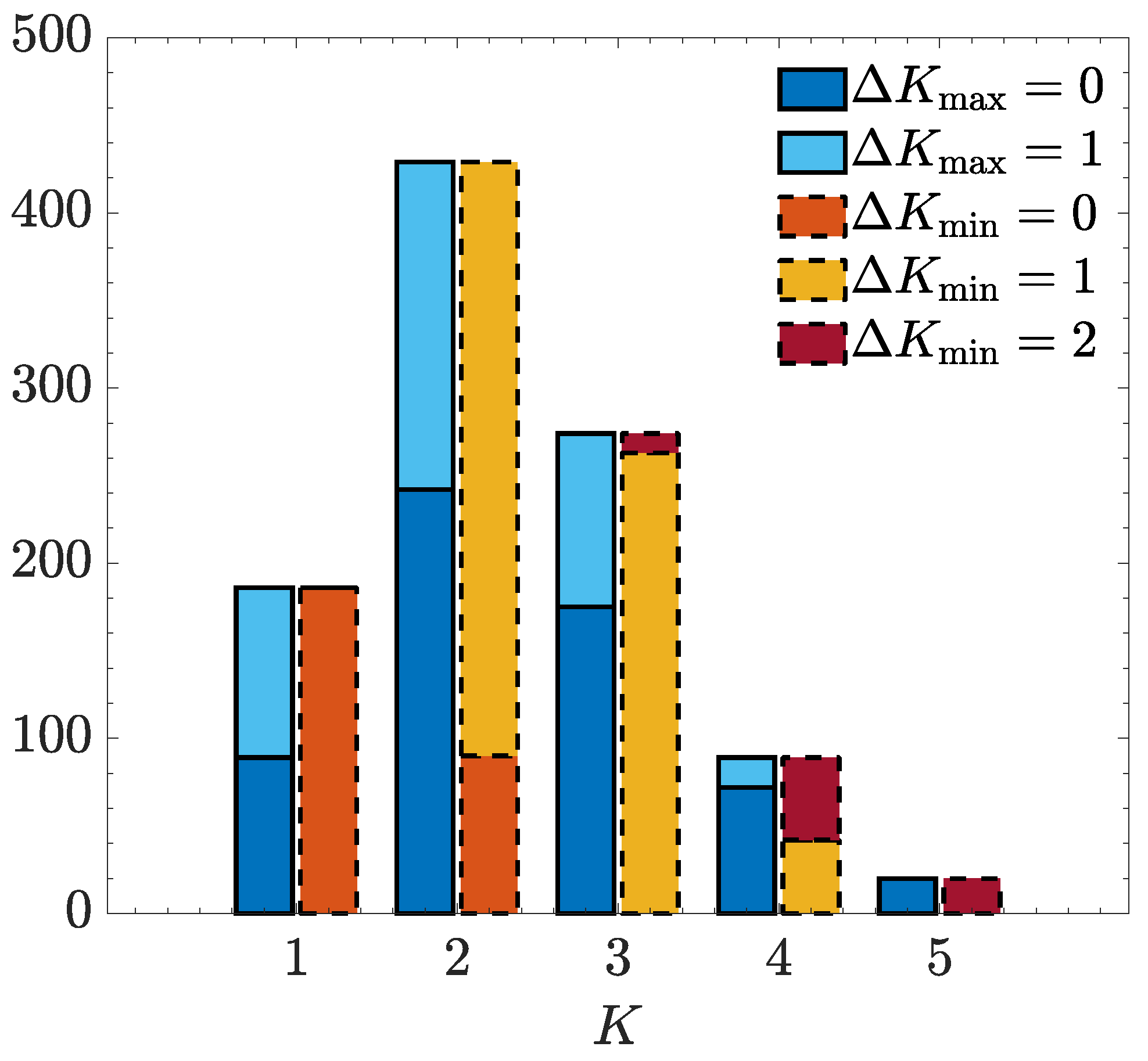
increases. This is observed in
Figure 12, which shows a histogram where, as a function of
, the difference
is depicted for 1000 scenarios, where we randomly choose for each parameter in
Table 3 a value within the range specified in the table. As can be observed, when
, corresponding to a small
, the lower bound is tight, that is,
for all scenarios. The difference
increases for increasing
and, thus,
. For
, the difference
for all scenarios.
As the above lower bound becomes less tight for a larger
, we designed an approximation for the minimum number of VLP-LEDs in an empirical way. To this end, we added to the lower bound (
24), a factor that depends on the parameters
,
and
, and tuned the factor based on the simulations. This led to the following approximation:
The difference
between this approximation
and the true minimum value
is also visualised in
Figure 12 for the 1000 simulated scenarios. As can be observed in the figure, for all scenarios,
or
, implying that the approximation can serve as an upper bound on the true minimum
, i.e.,
. We also observe in the histogram that the upper bound (
25) becomes more tight when
increases. This will occur when
increases (for a given
) or
reduces (for a given
).
In this analysis, we restricted our attention to square areas. However, the results can be extended to rectangular areas where
. We found that the lower and upper bounds (
24) and (
25) can also be used to find a lower and upper bound on
and
for the rectangular case by replacing in (
24) and (
25)
with
and
, respectively, for the ranges indicated in
Table 3 provided that
and
, i.e.,
.
4.5. Illumination- versus Visible-Light-Positioning-Based Optimisation
Until now, we have focused on the placement of the VLP-LEDs in order to optimise the positioning performance without considering the primary purpose of the LEDs, i.e., illumination. In [
14], we analysed the placement of LEDs to satisfy the constraints on the horizontal illuminance and uniformity of illumination according to the DIN EN 12464-1 standard [
28]. Assuming that the LEDs are grouped into luminaries, in [
14], we showed that the average illuminance depends mainly on the total number of LEDs contained in the luminaries, while the uniformity of the illuminance depends primarily on the placement of the luminaries. That analysis also revealed that the number and spacing of the luminaries to meet the required illuminance and uniformity of illumination depend in a complex manner on the system parameters such as the size of the room, the layout of luminaries to be used and the desired level of lighting uniformity in the lit area.
In this section, we will use the results of [
14] to evaluate the feasibility of combining illumination with VLP on the same infrastructure. To this end, we assume that the illumination LEDs are grouped in luminaries and distributed on the ceiling in a rectangular grid, similarly to in [
14]. Further, we assume that each luminary contains one VLP-LED placed in the centre of the luminary. Taking into account that the average illuminance depends mainly on the number of LEDs and is essentially independent of the placement of the LEDs, in our analysis, we focus on the illuminance uniformity.
We first compare the results of the optimal luminary placement obtained from [
14] with the optimal VLP-LED spacing from this paper. To this end, we determine the spacing between the luminaries in order to maintain the illumination uniformity levels as prescribed in the standard [
28]. Similarly to in
Section 4.3, this spacing is expressed in terms of the fraction
of
. As the standard defines a range for the illumination level and uniformity, the value of
for which the illumination conditions are satisfied will also belong to a range, i.e.,
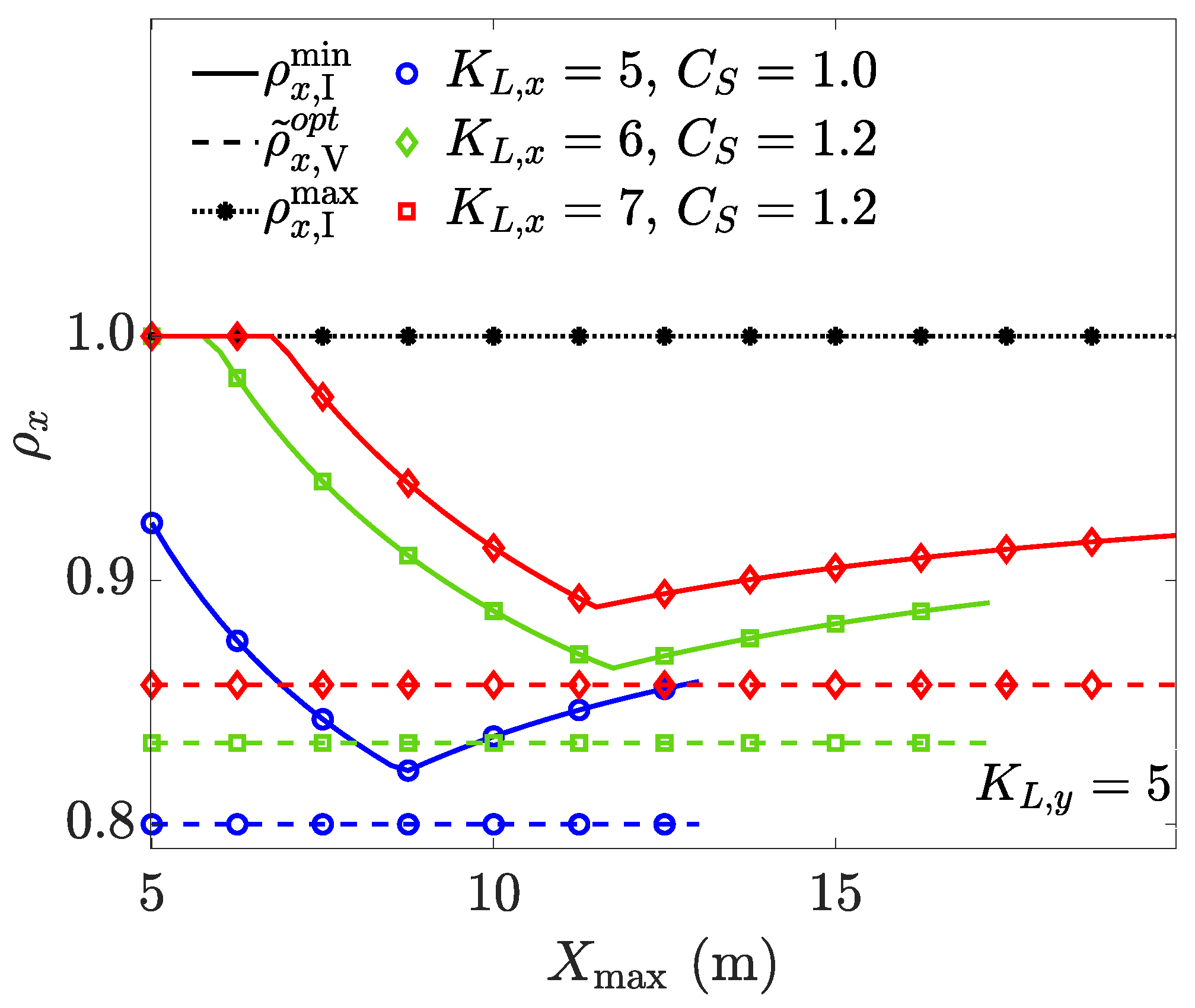
. In
Figure 13, we show this range of
as a function of
for different values of
and
, assuming
. For the parameters used in the figure, the upper bound is equal to
for all values of
, while the lower bound
varies as a function of
. In this figure, we also show the optimal spacing for the VLP-LEDs in terms of the fraction
of
. As can be observed in the figure, the optimal value
for the spacing of the VLP-LEDs lies below the curve of
. In other words, the minimum spacing between the luminaries according to the illumination constraints is larger than the optimal spacing between the LEDs for VLP. Hence, it is not possible to satisfy the illumination constraints and obtain optimal positioning accuracy at the same time. This implies that we need to find a compromise between the illumination and positioning constraints.
For this reason, we evaluate how the spacing resulting from the illumination conditions degrades the positioning performance, and how the spacing obtained from the VLP constraints analysed in this paper impacts the illumination levels and uniformity. In
Figure 14a, we show the rCRB for the optimal spacing for VLP, i.e., corresponding to the fraction
, and for the lower bound
as, for all spacings satisfying the illumination constraints, this spacing is closest to the optimal spacing for VLP, implying that the degradation of the rRCB will be the smallest. As can be seen in the figure, the degradation is negligibly small for areas up to
m. For
m, the degradation increases but is still small. On the other hand, in
Figure 14b,c, we show the uniformity for the task area (the task area is defined as the central part of the area where the illuminance uniformity should be higher, i.e., more uniform, than in the surrounding area, which is defined as the part of the area near its boundaries. For the task area, this uniformity should be
, and, for the surrounding area,
)
and the surrounding area
for different values of
and
, assuming
,
and
(
defines the central sub-area of the area where the receiver is assessed, and
means that 80% is taken in both the
and
directions). As can be observed in
Figure 14b, for the task area, the uniformity for
exceeds the required level of uniformity for all considered area sizes (except for
, where it is only met for
). For the optimum spacing for VLP, the figure shows that, for a larger
, the uniformity level for
lies above that for
. Hence, we still meet the uniformity condition. However, for smaller area sizes, i.e.,
< 9–11 m, we cannot satisfy the uniformity requirement for the task area when using the optimal spacing for VLP. On the other hand, as can be seen in
Figure 14c, in the surrounding area, the minimum uniformity level for
is reached for all area sizes, but this is not the case for the optimum spacing
for VLP. Here, only for a smaller
, that is,
< 8–9 m, is the uniformity sufficiently large. Hence, when the optimal spacing for VLP is used, these results show that it is not possible to satisfy the illumination constraints for both the task and surrounding area.
To summarise this subsection, our results show that the optimal spacing for the VLP does not conform to the spacing range in which the illumination constraints are satisfied, implying that a compromise needs to be established between VLP and illumination. Based on our results, if one wants to design a combined illumination and positioning system, our recommendation is to retain the (minimum) spacing for illumination because, when using this spacing, the degradation of the positioning accuracy is limited, while, in the other case, when we use the optimal spacing for VLP, the uniformity of illumination will be seriously affected.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}