Interference Mitigation in VLC Systems using a Variable Focus Liquid Lens



Abstract
1. Introduction
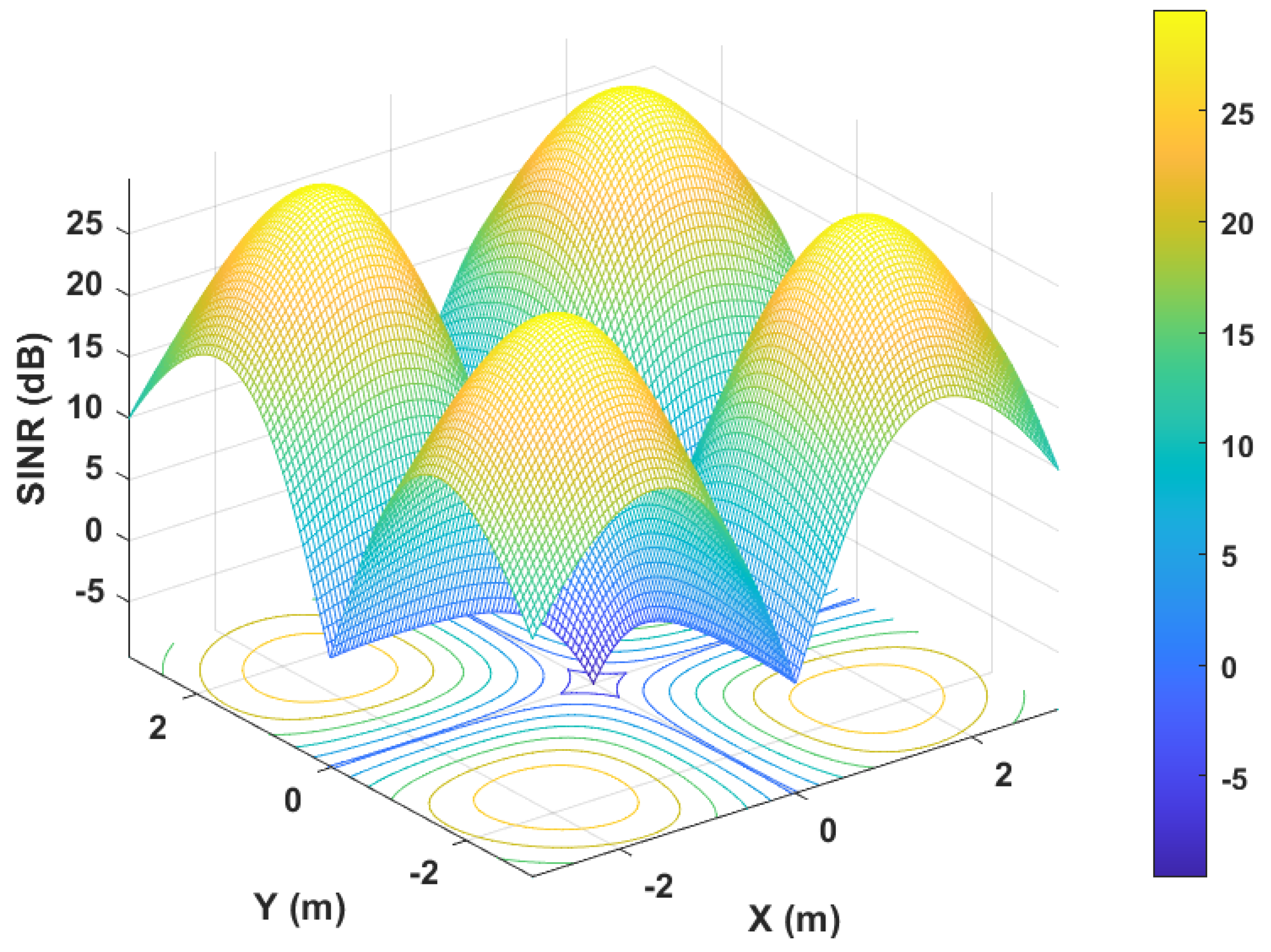
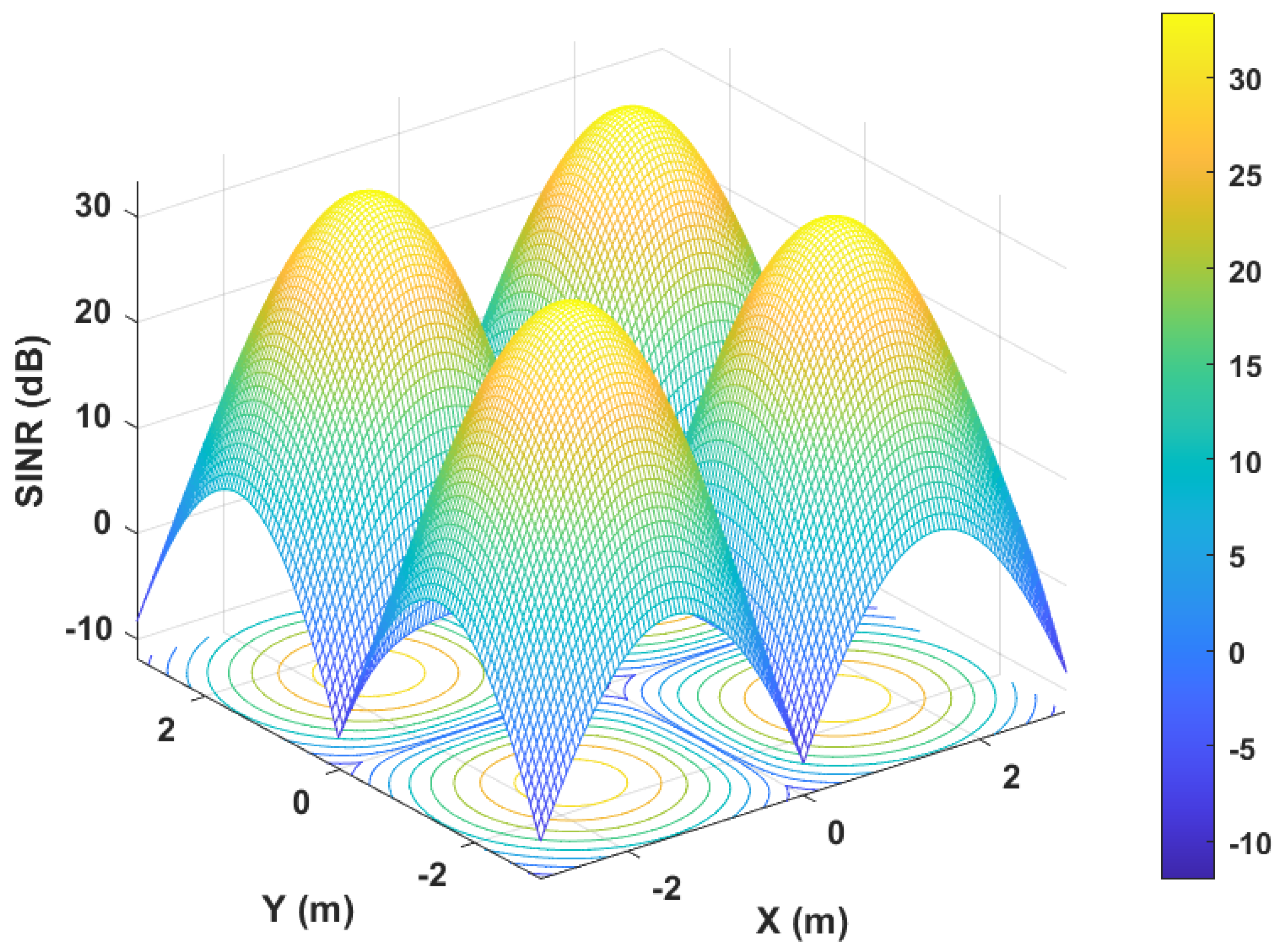
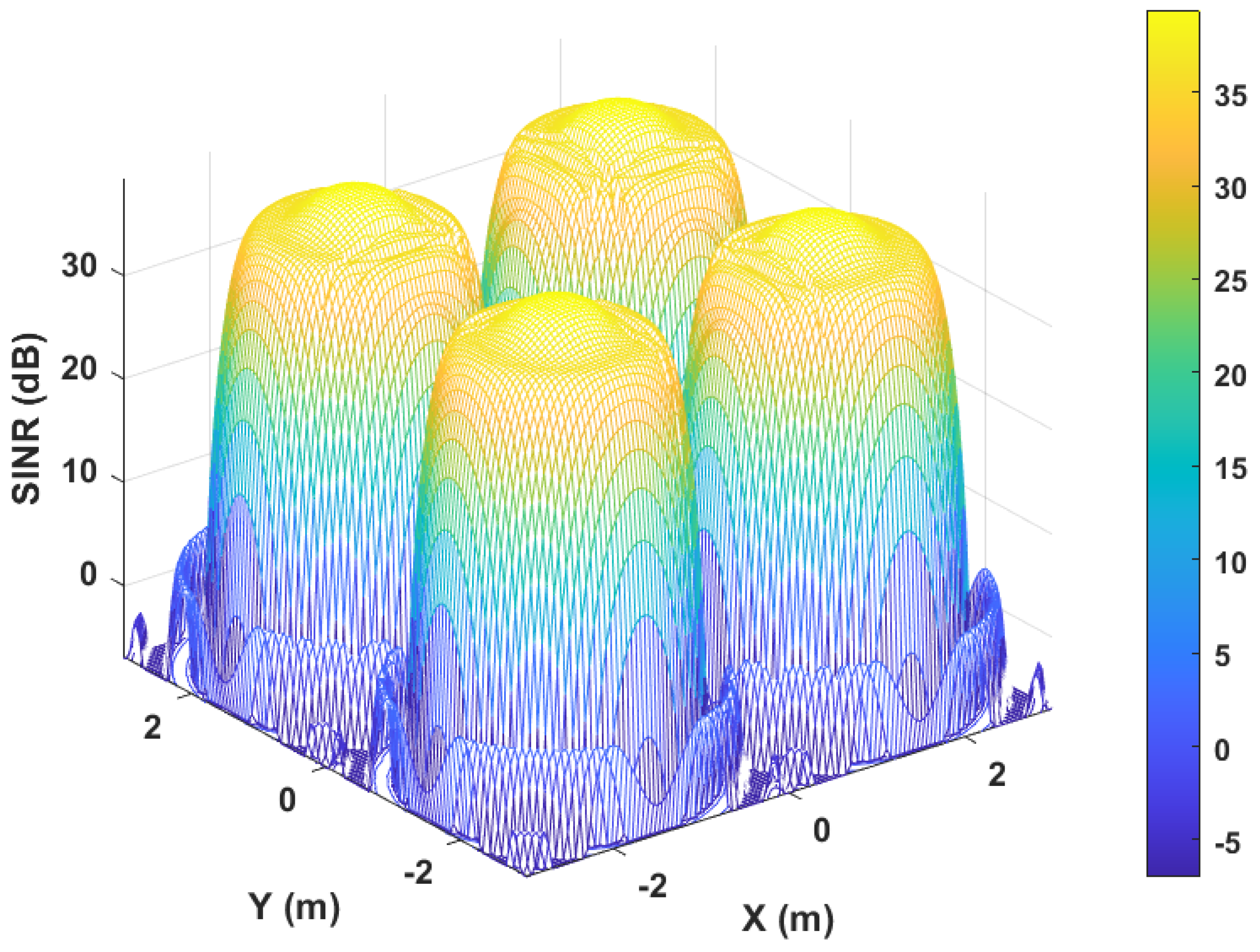
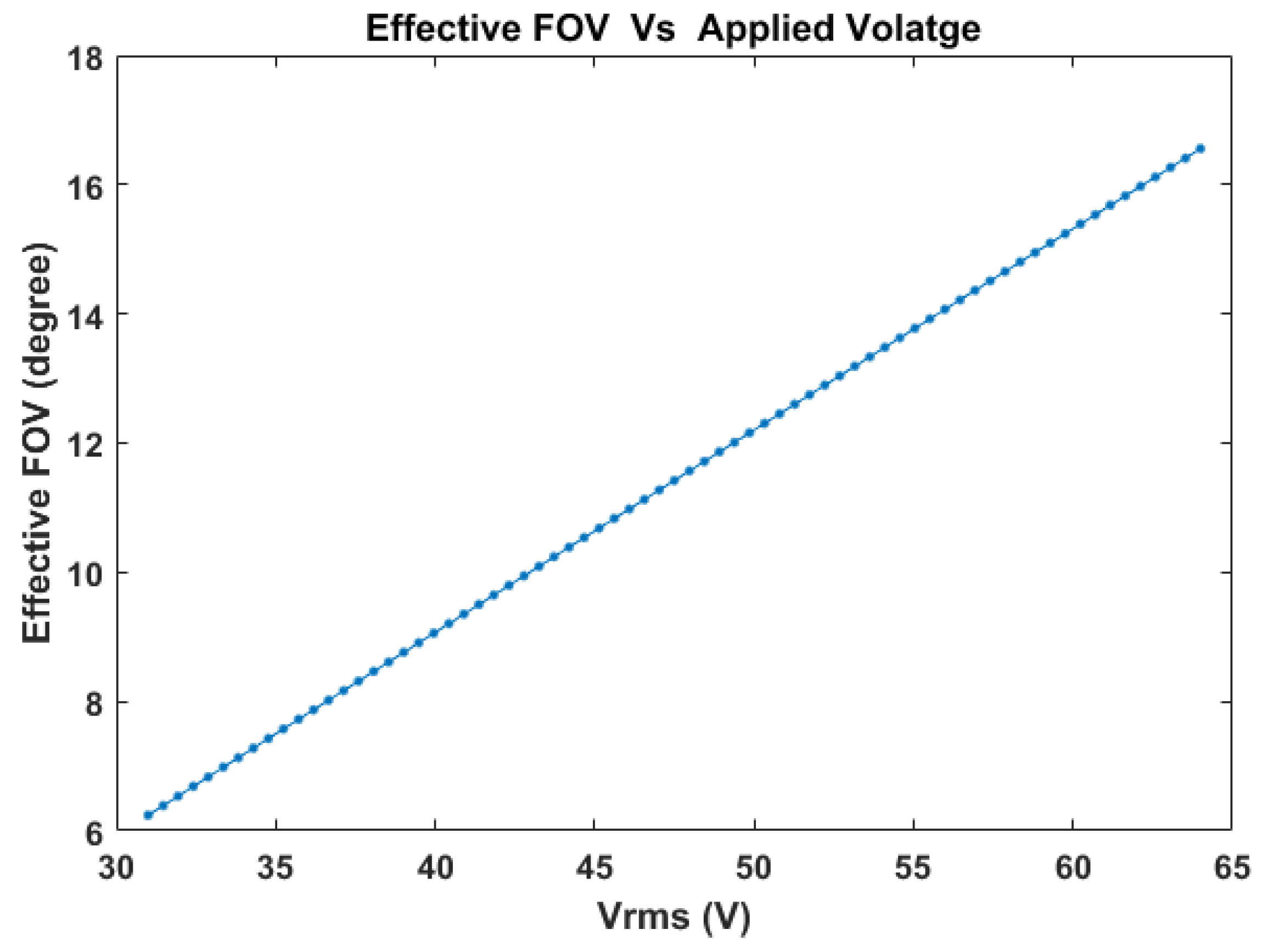
2. Simulation Results
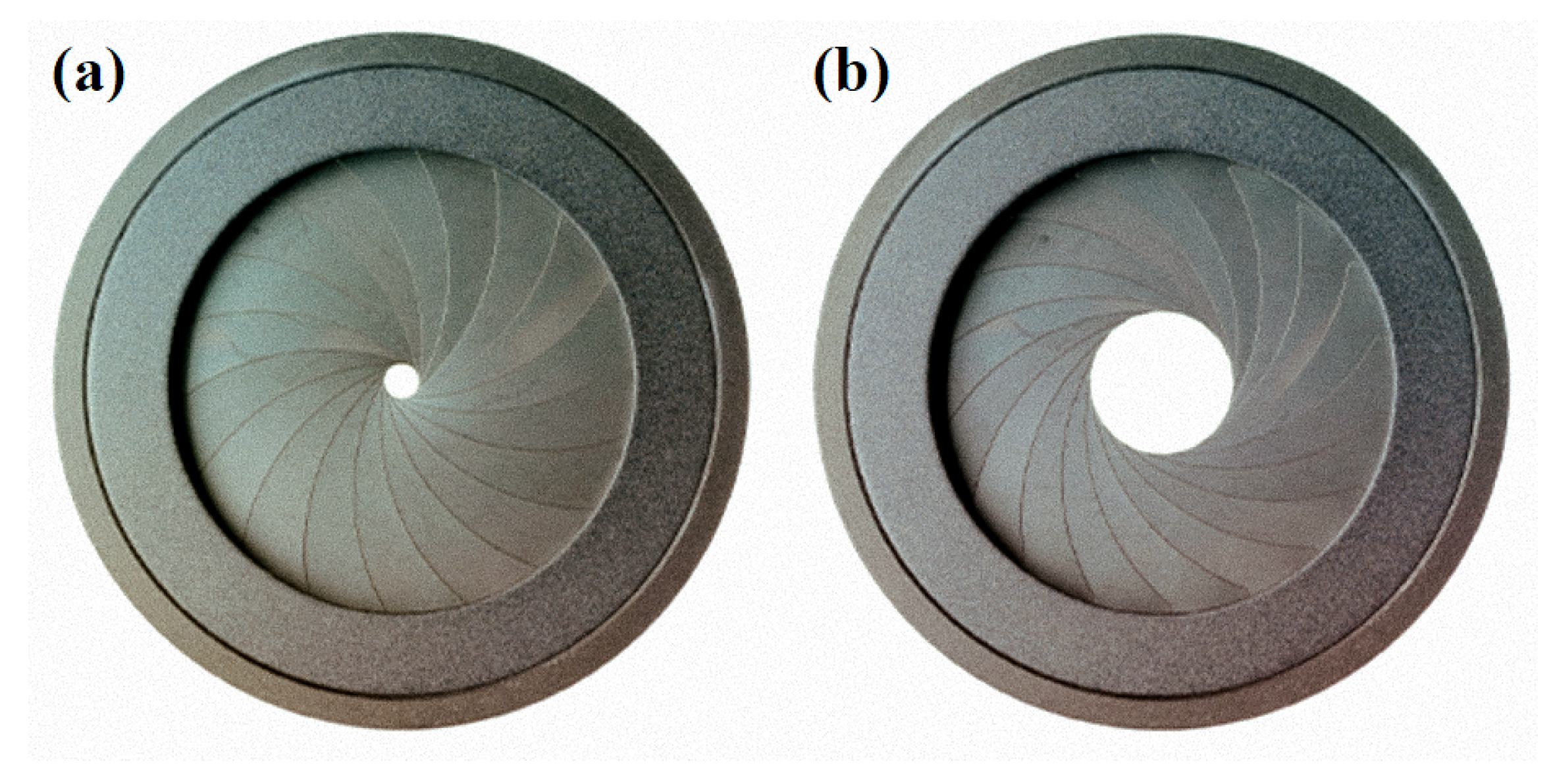
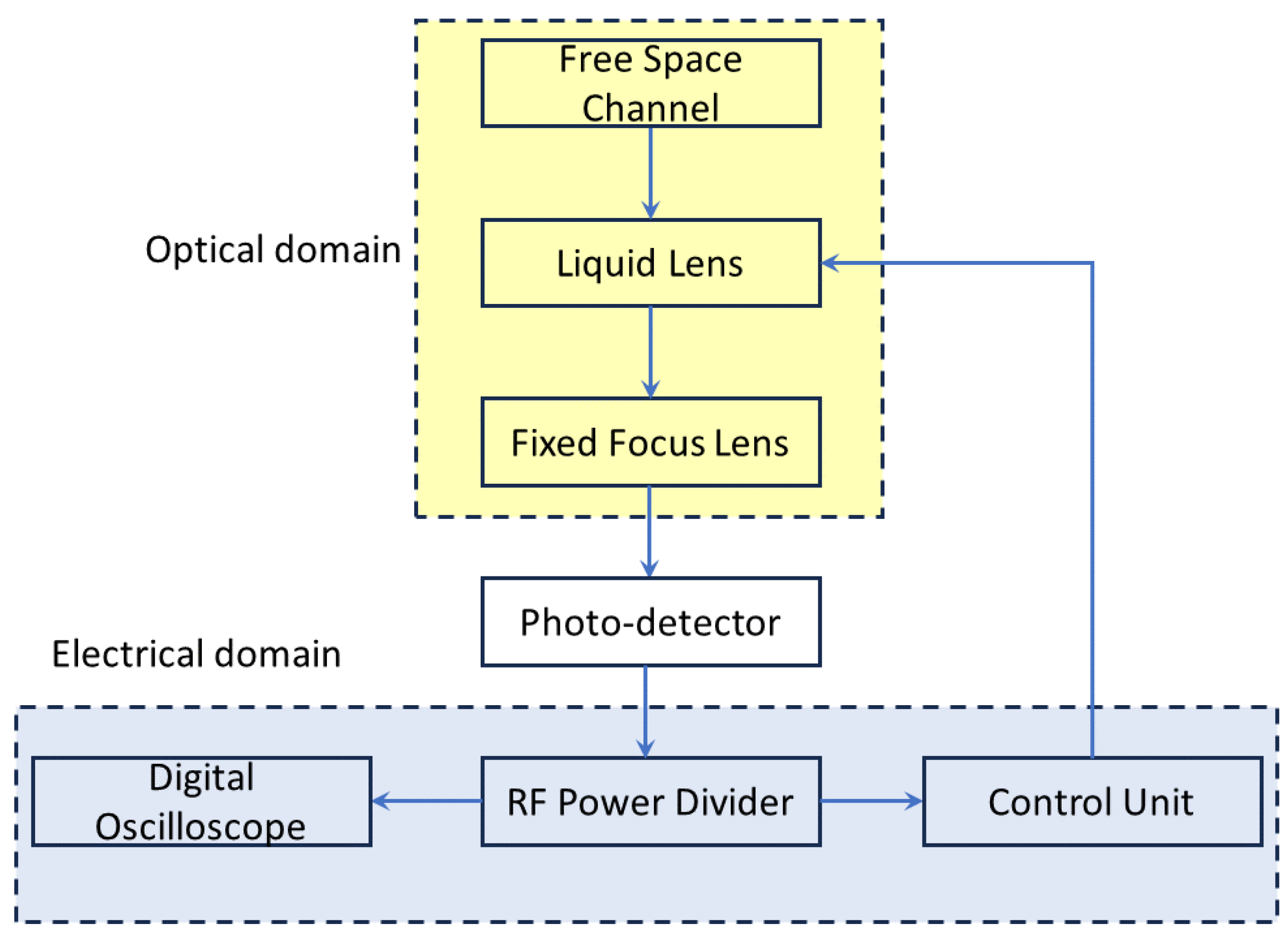
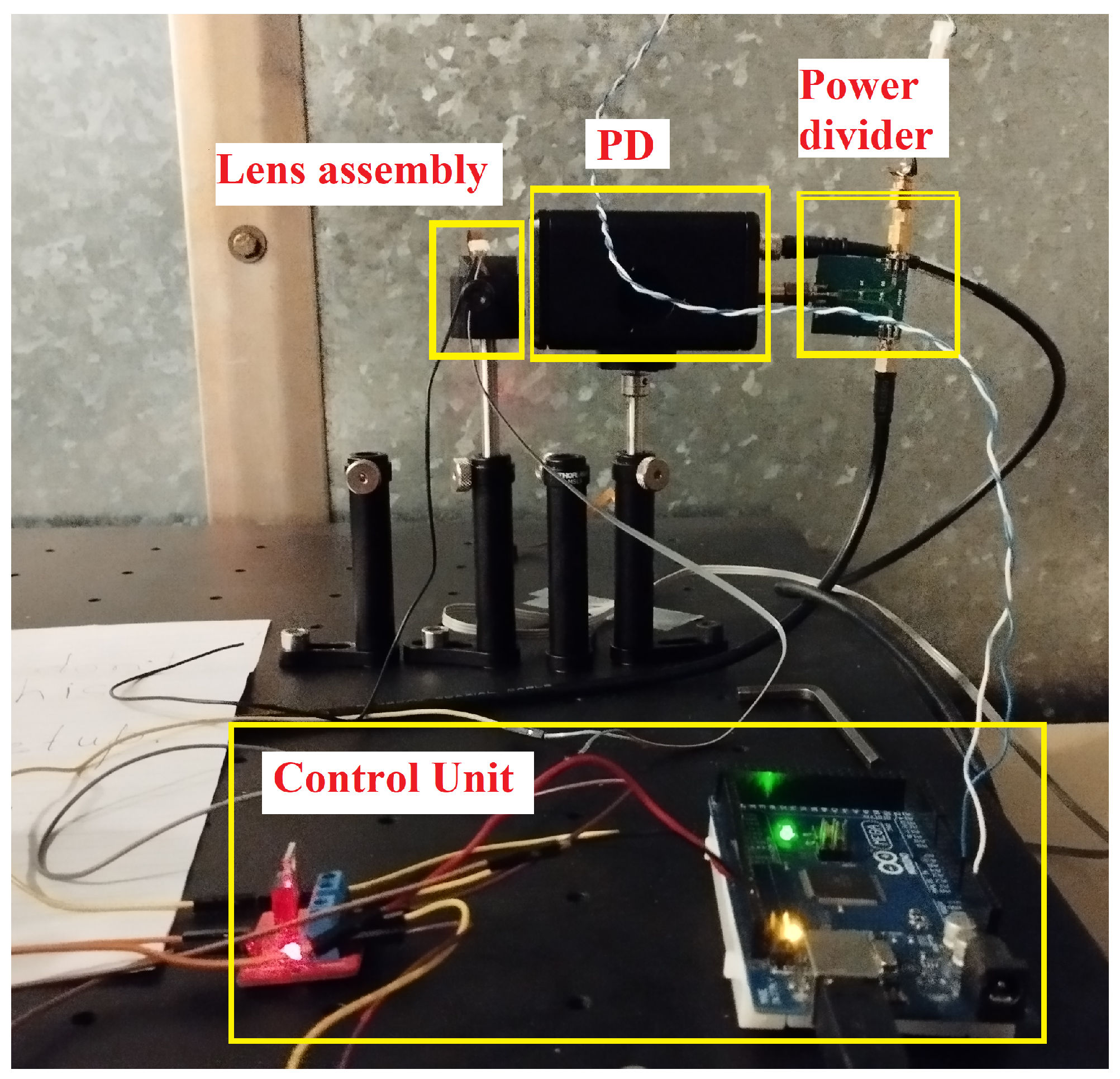
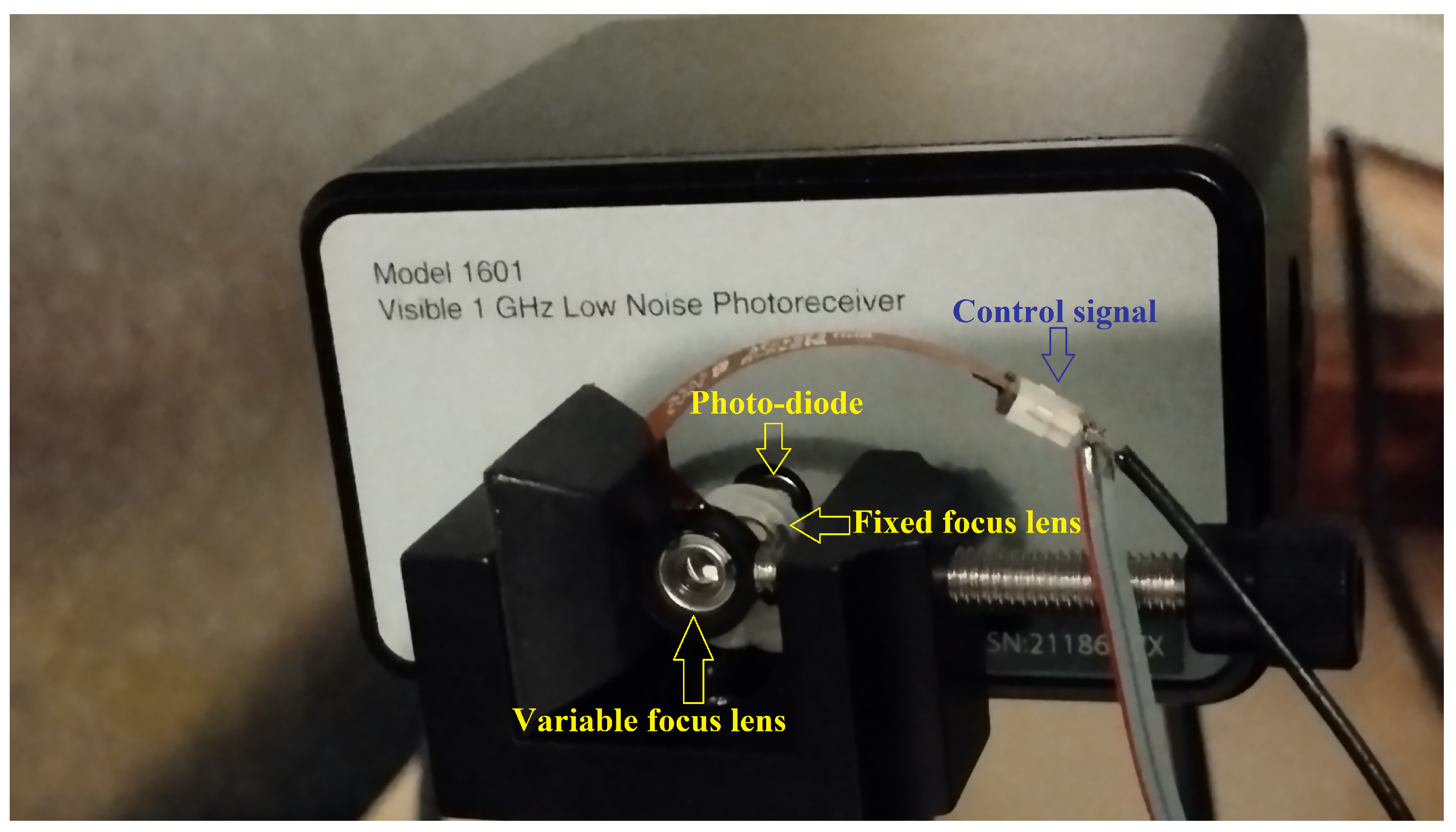
3. System Description
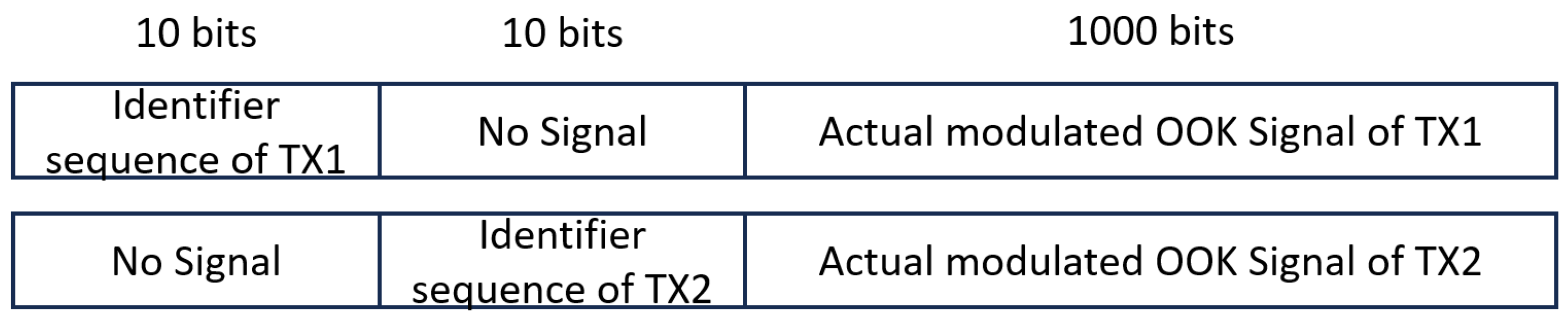
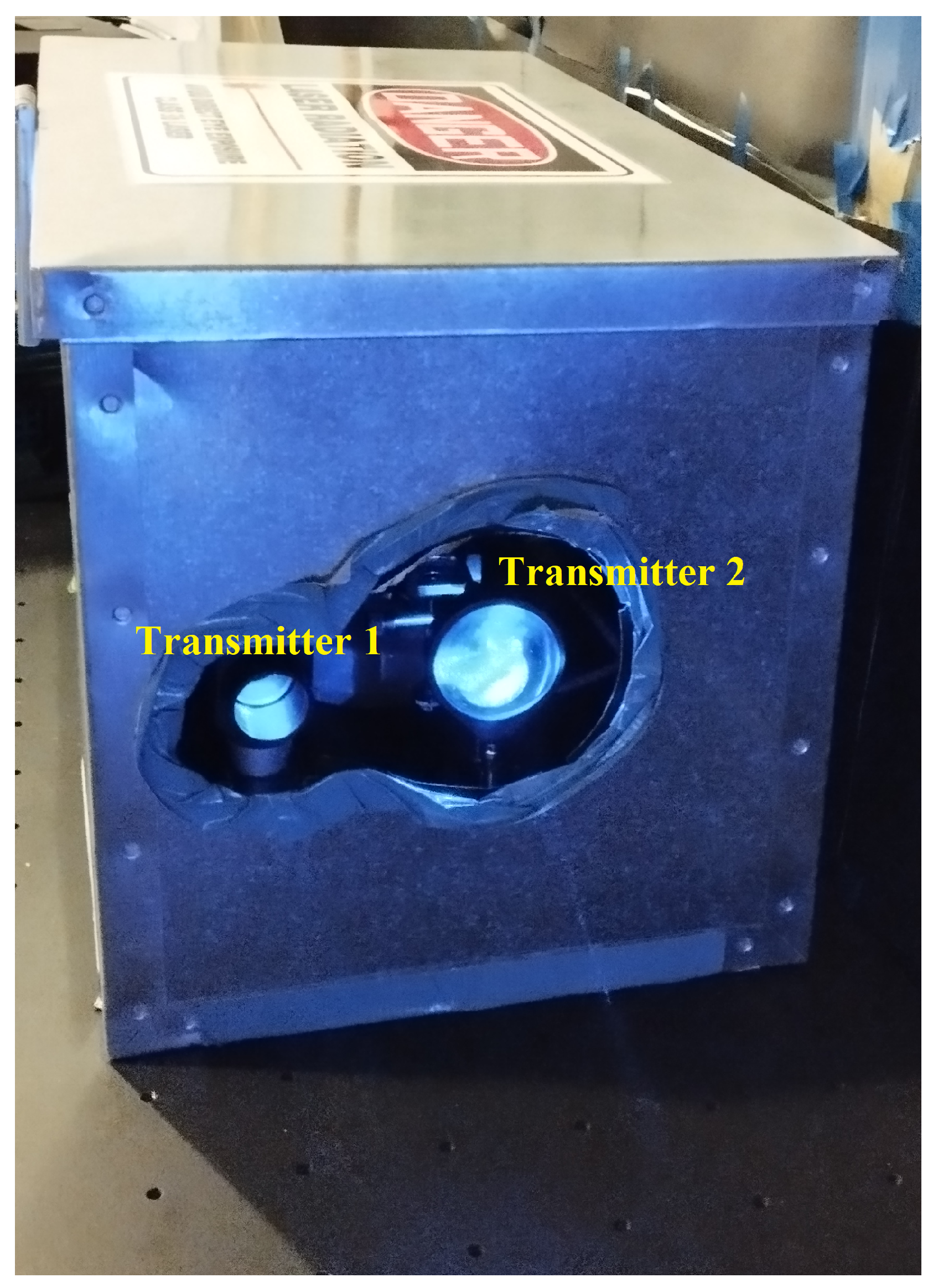
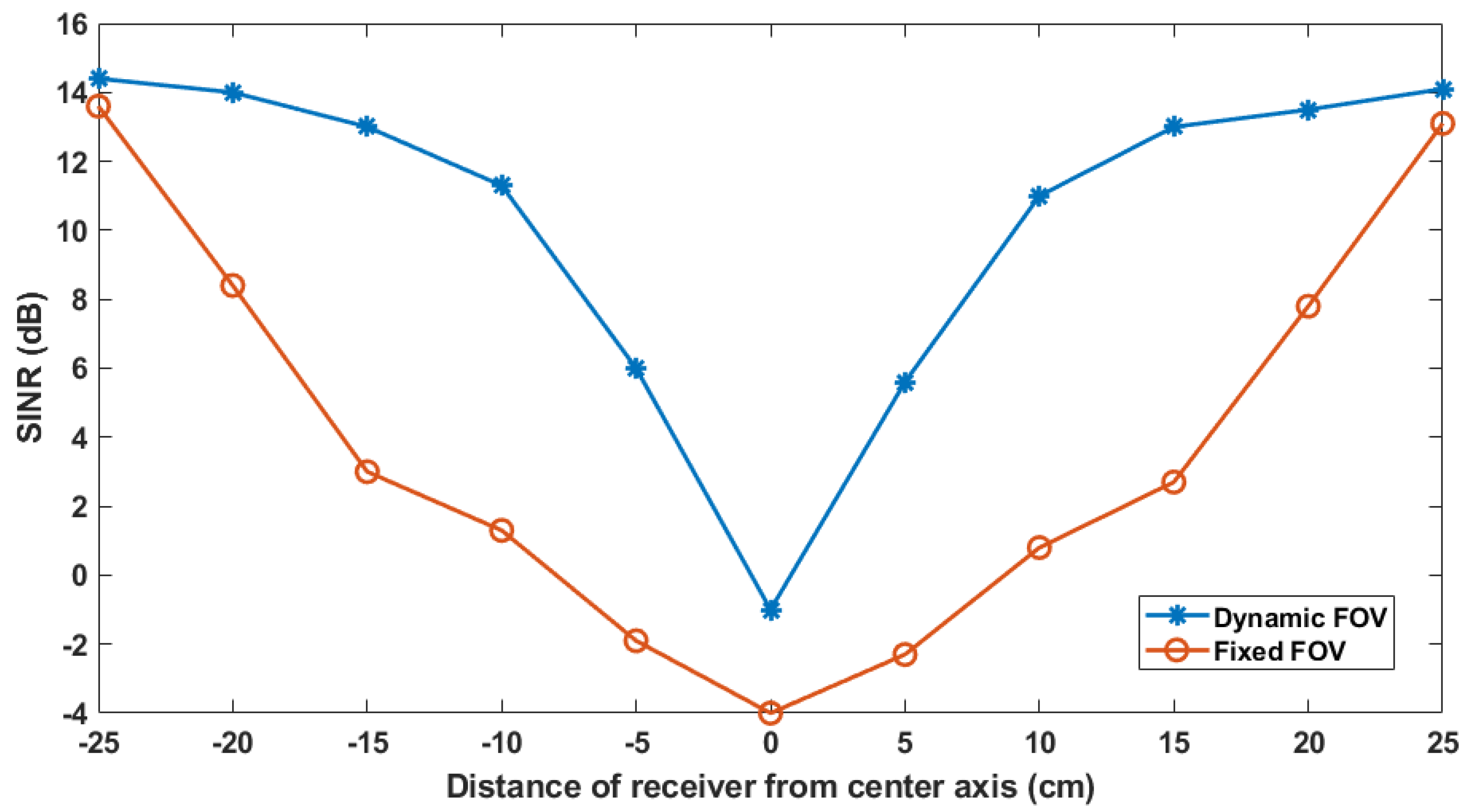
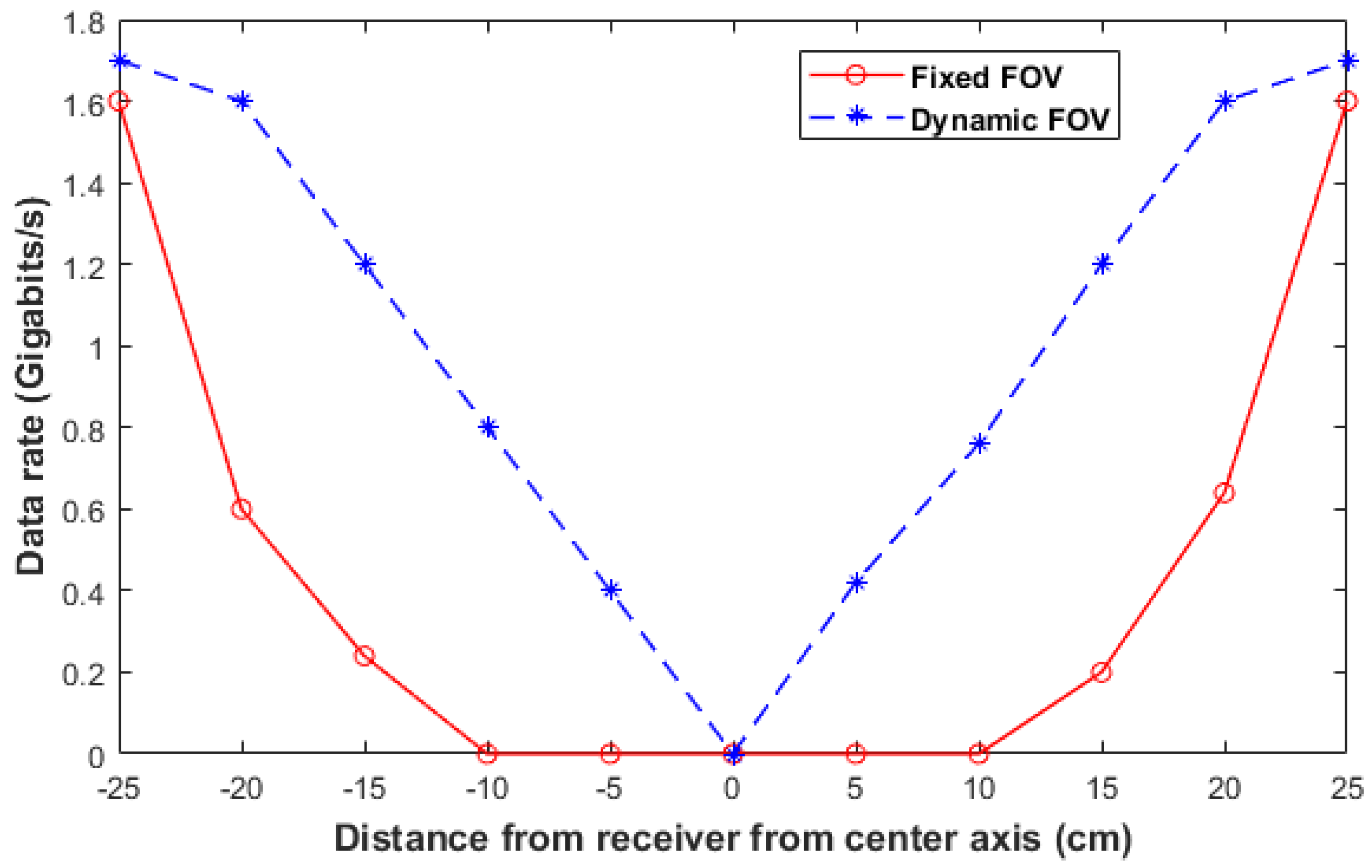
4. Experiments and Results
Communication Performance
5. Discussion and Potential Applications
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Burchardt, H.; Serafimovski, N.; Tsonev, D.; Videv, S.; Haas, H. VLC: Beyond point-to-point communication. IEEE Commun. Mag. 2014, 52, 98–105. [Google Scholar] [CrossRef]
- Ayyash, M.; Elgala, H.; Khreishah, A.; Jungnickel, V.; Little, T.; Shao, S.; Rahaim, M.; Schulz, D.; Hilt, J.; Freund, R. Coexistence of WiFi and LiFi toward 5G: Concepts, opportunities, and challenges. IEEE Commun. Mag. 2016, 54, 64–71. [Google Scholar] [CrossRef]
- Ghassemlooy, Z.; Ebrahimi, F.; Rajbhandari, S.; Olyaee, S.; Tang, X.; Zvanovec, S. Investigation of a hybrid ofdm-pwm/ppm visible light communications system. Opt. Commun. 2018, 429, 65–71. [Google Scholar]
- Chi, Y.C.; Hsieh, D.H.; Lin, C.Y.; Chen, H.Y.; Huang, C.Y.; He, J.H.; Ooi, B.; DenBaars, S.P.; Nakamura, S.; Kuo, H.C.; et al. Phosphorous diffuser diverged blue laser diode for indoor lighting and communication. Sci. Rep. 2015, 5, 18690. [Google Scholar] [CrossRef] [PubMed]
- Lee, C.; Shen, C.; Cozzan, C.; Farrell, R.M.; Speck, J.S.; Nakamura, S.; Ooi, B.S.; DenBaars, S.P. Gigabit-per-second white light-based visible light communication using near-ultraviolet laser diode and red-, green-, and blue-emitting phosphors. Opt. Express 2017, 25, 17480–17487. [Google Scholar] [CrossRef] [PubMed]
- Wu, T.C.; Chi, Y.C.; Wang, H.Y.; Tsai, C.T.; Cheng, C.H.; Chang, J.K.; Chen, L.Y.; Cheng, W.H.; Lin, G.R. White-lighting communication with a Lu3Al5O12: Ce3+/CaAlSiN3: Eu2+ glass covered 450-nm InGaN laser diode. J. Light. Technol. 2018, 36, 1634–1643. [Google Scholar] [CrossRef]
- Yeh, C.H.; Chow, C.W.; Wei, L.Y. 1250 Mbit/s OOK wireless white-light VLC transmission based on phosphor laser diode. IEEE Photonics J. 2019, 11, 7903205. [Google Scholar] [CrossRef]
- Bera, K.; Parthiban, R.; Karmakar, N. Coverage Improvement of Laser Diode-Based Visible Light Communication Systems Using an Engineered Diffuser. IEEE Access 2023, 11, 122833–122841. [Google Scholar] [CrossRef]
- Abdalla, I.; Rahaim, M.B.; Little, T.D. Interference mitigation through user association and receiver field of view optimization in a multi-user indoor hybrid RF/VLC illuminance-constrained network. IEEE Access 2020, 8, 228779–228797. [Google Scholar] [CrossRef]
- Eltokhey, M.W.; Khalighi, M.A.; Ghassemlooy, Z. Dimming-aware interference mitigation for NOMA-based multi-cell VLC networks. IEEE Commun. Lett. 2020, 24, 2541–2545. [Google Scholar] [CrossRef]
- Eltokhey, M.W.; Khalighi, M.A.; Ghassemlooy, Z. Optimization of Receivers’ Field of Views in Multi-User VLC Networks: A Bio-Inspired Approach. IEEE Wirel. Commun. 2022, 29, 132–139. [Google Scholar] [CrossRef]
- Eldeeb, H.B.; Selmy, H.A.; Elsayed, H.M.; Badr, R.I. Interference mitigation and capacity enhancement using constraint field of view ADR in downlink VLC channel. IET Commun. 2018, 12, 1968–1978. [Google Scholar] [CrossRef]
- Palacios Játiva, P.; Román Canizares, M.; Azurdia-Meza, C.A.; Zabala-Blanco, D.; Dehghan Firoozabadi, A.; Seguel, F.; Montejo-Sánchez, S.; Soto, I. Interference mitigation for visible light communications in underground mines using angle diversity receivers. Sensors 2020, 20, 367. [Google Scholar] [CrossRef]
- Hosney, M.; Selmy, H.A.; Srivastava, A.; Elsayed, K.M. Interference mitigation using angular diversity receiver with efficient channel estimation in MIMO VLC. IEEE Access 2020, 8, 54060–54073. [Google Scholar] [CrossRef]
- Younus, S.H. Interference mitigation in multiuser WDM VLC systems using differential receiver. Trans. Emerg. Telecommun. Technol. 2022, 33, e4512. [Google Scholar] [CrossRef]
- Al-Sakkaf, A.G.A.; Morales-Céspedes, M. Interference Management for VLC Indoor Systems based on Overlapping Field-of-View Angle Diversity Receivers. IEEE Access 2024, 12, 51431–51449. [Google Scholar] [CrossRef]
- Atta, M.A.; Bermak, A. A polarization-based interference-tolerant VLC link for low data rate applications. IEEE Photonics J. 2018, 10, 7901911. [Google Scholar] [CrossRef]
- Krohn, A.; Harlakin, A.; Arms, S.; Pachnicke, S.; Hoeher, P.A. Impact of liquid crystal based interference mitigation and precoding on the multiuser performance of VLC massive MIMO arrays. IEEE Photonics J. 2022, 14, 7348112. [Google Scholar] [CrossRef]
- Abdalla, I.; Rahaim, M.B.; Little, T.D. Dynamic FOV tracking receiver for dense optical wireless networks. In Proceedings of the 2019 IEEE Global Communications Conference (GLOBECOM), Waikoloa, HI, USA, 9–13 December 2019; pp. 1–6. [Google Scholar]
- Dixit, V.; Kumar, A. BER analysis of dynamic FOV based MIMO-NOMA-VLC system. AEU-Int. J. Electron. Commun. 2021, 142, 153989. [Google Scholar] [CrossRef]
- Abdalla, I.; Rahaim, M.B.; Little, T.D. Dynamic FOV visible light communications receiver for dense optical networks. IET Commun. 2019, 13, 822–830. [Google Scholar] [CrossRef]
- Ahmad, F.; Raghunathan, V. Design of variable link length indoor visible light communication system using focus tunable liquid lens. In Proceedings of the Broadband Access Communication Technologies XV, Online, CA, USA, 6–12 March 2021; Volume 11711, pp. 96–102. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Mechanism | Size/Shape | No of PDs | Power Consumption |
|---|---|---|---|---|
| [12,13,14,15,16] | Angular diversity receiver | Non-planar and bulky | 4 or more | Higher due to multiple PDs (4 times compared to single PD systems) |
| [11,19,21] | Mechanical iris | Planar but large (few cm) | 1 | Higher due to mechanical iris and motor (few hundred mW) |
| This work | Liquid lens | Planar and compact (few mm) | 1 | Lower (14 mW) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bera, K.; Karmakar, N. Interference Mitigation in VLC Systems using a Variable Focus Liquid Lens. Photonics 2024, 11, 506. https://doi.org/10.3390/photonics11060506
Bera K, Karmakar N. Interference Mitigation in VLC Systems using a Variable Focus Liquid Lens. Photonics. 2024; 11(6):506. https://doi.org/10.3390/photonics11060506
Chicago/Turabian StyleBera, Krishnendu, and Nemai Karmakar. 2024. "Interference Mitigation in VLC Systems using a Variable Focus Liquid Lens" Photonics 11, no. 6: 506. https://doi.org/10.3390/photonics11060506
APA StyleBera, K., & Karmakar, N. (2024). Interference Mitigation in VLC Systems using a Variable Focus Liquid Lens. Photonics, 11(6), 506. https://doi.org/10.3390/photonics11060506