An Unmanned Vehicle-Based Remote Raman System for Real-Time Trace Detection and Identification

 ,
, {kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
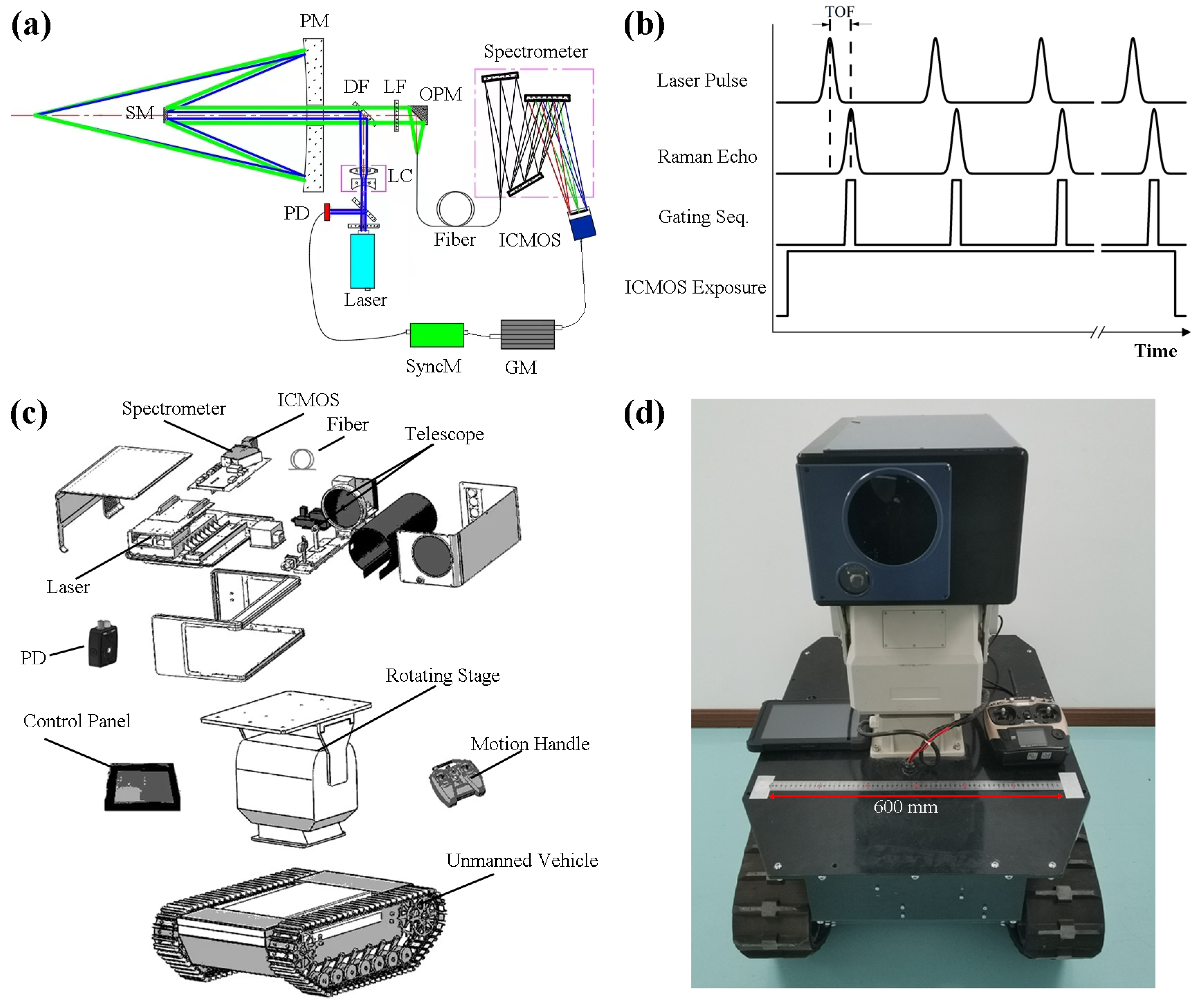
2. Methods and Experiment
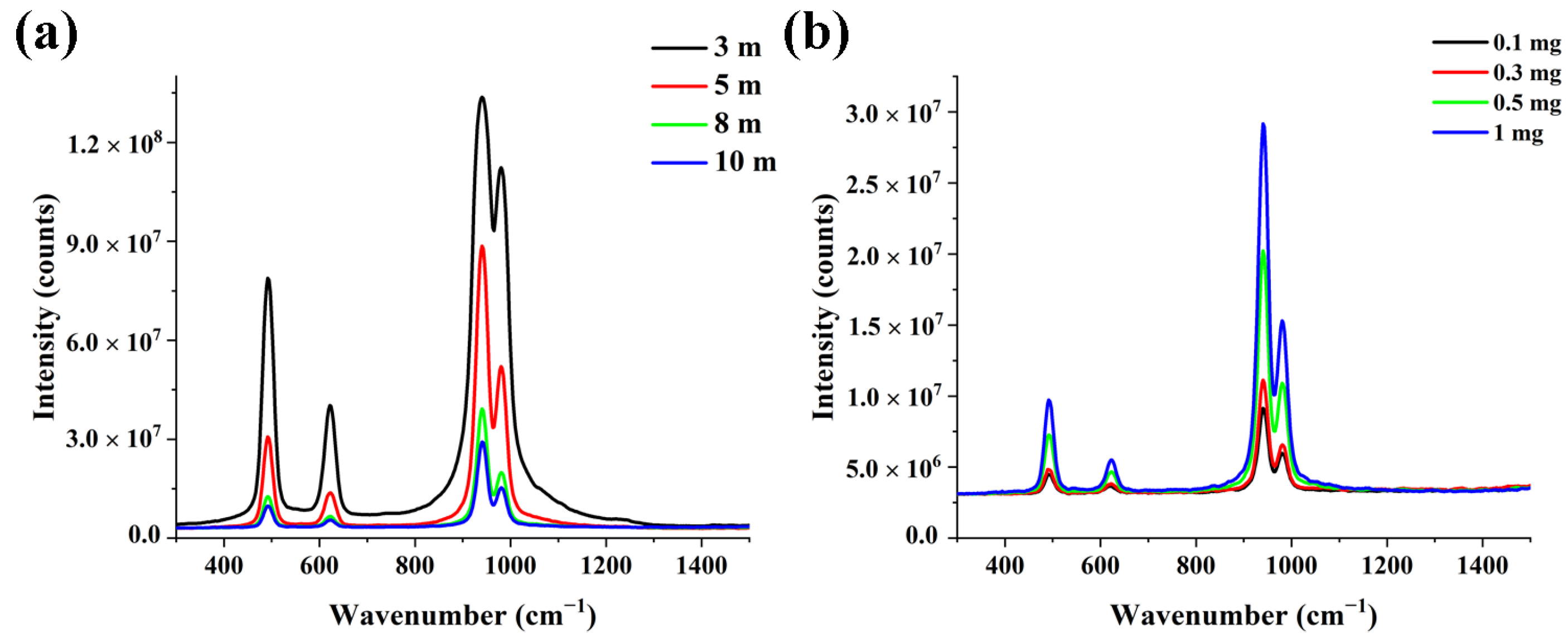
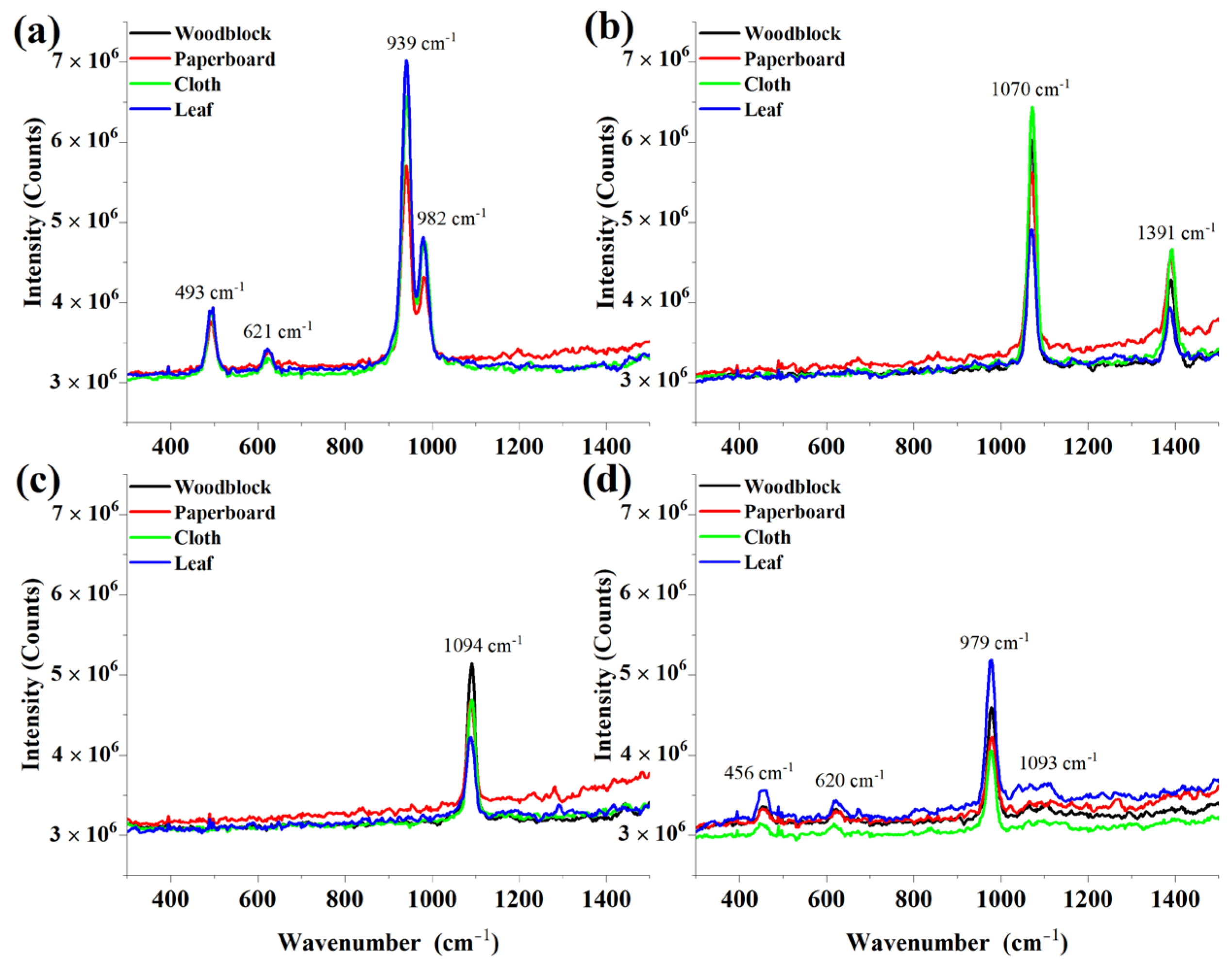
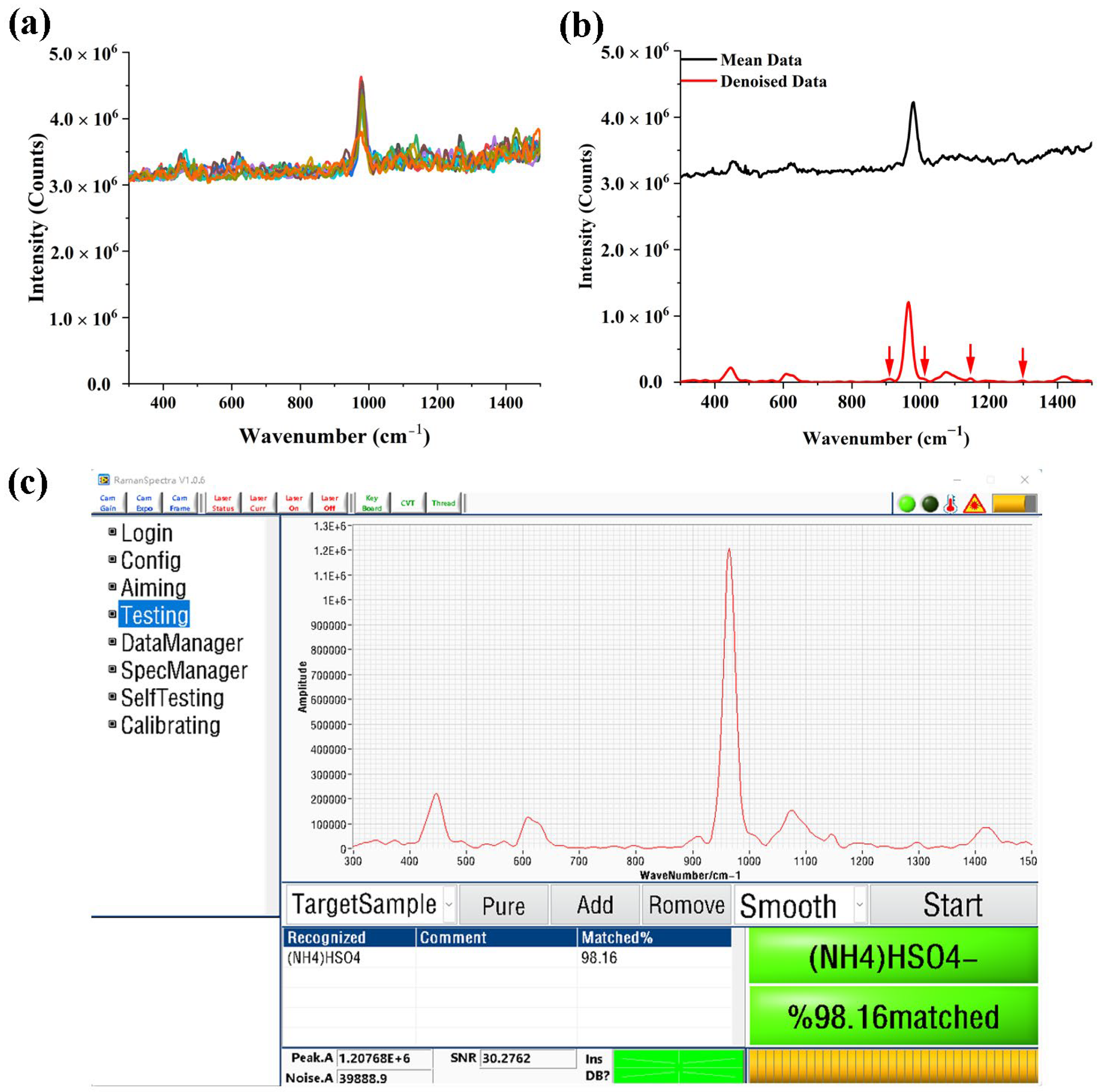
3. Results and Discussion
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Misra, A.K.; Acosta-Maeda, T.E.; Porter, J.N.; Berlanga, G.; Muchow, D.; Sharma, S.K.; Chee, B. A Two Components Approach for Long Range Remote Raman and Laser-Induced Breakdown (LIBS) Spectroscopy Using Low Laser Pulse Energy. Appl. Spectrosc. 2019, 73, 320–328. [Google Scholar] [CrossRef] [PubMed]
- Cantu, L.M.L.; Gallo, E.C.A. Explosives and warfare agents remote Raman detection on realistic background samples. Eur. Phys. J. Plus 2022, 137, 207. [Google Scholar] [CrossRef]
- Angel, S.M.; Gomer, N.R.; Sharma, S.K.; McKay, C. Remote Raman Spectroscopy for Planetary Exploration: A Review. Appl. Spectrosc. 2012, 66, 137–150. [Google Scholar] [CrossRef] [PubMed]
- Giordano, D.; Russell, J.K.; Gonzalez-Garcia, D.; Bersani, D.; Dingwell, D.B.; Del Negro, C. Raman Spectroscopy from Laboratory and Proximal to Remote Sensing: A Tool for the Volcanological Sciences. Remote Sens. 2020, 12, 805. [Google Scholar] [CrossRef]
- Li, Y.; Suzuki, A.; Cheung, C.S.; Gu, Y.; Kogou, S.; Liang, H. A study of potential laser-induced degradation in remote standoff Raman spectroscopy for wall paintings. Eur. Phys. J. Plus 2022, 137, 1102. [Google Scholar] [CrossRef]
- Corden, C.; Boitor, R.; Notingher, I. Time-gated Raman spectroscopy for biomedical application under ambient or strong background light conditions. J. Phys. D Appl. Phys. 2021, 54, 504003. [Google Scholar] [CrossRef]
- Misra, A.K.; Sharma, S.K.; Chio, C.H.; Lucey, P.G.; Lienert, B. Pulsed remote Raman system for daytime measurements of mineral spectra. Spectrochim. Acta Part A Mol. Biomol. Spectrosc. 2005, 61, 2281–2287. [Google Scholar] [CrossRef]
- Acosta-Maeda, T.E.; Misra, A.K.; Muzangwa, L.G.; Berlanga, G.; Muchow, D.; Porter, J.; Sharma, S.K. Remote Raman measurements of minerals, organics, and inorganics at 430 m range. Appl. Opt. 2016, 55, 10283–10289. [Google Scholar] [CrossRef]
- Misra, A.K.; Acosta-Maeda, T.E.; Porter, J.N.; Egan, M.J.; Sandford, M.W.; Oyama, T.; Zhou, J. Remote Raman Detection of Chemicals from 1752 m During Afternoon Daylight. Appl. Spectrosc. 2020, 74, 233–240. [Google Scholar] [CrossRef]
- Gueutue, E.S.F.; Canizares, A.; Simon, P.; Raimboux, N.; Hennet, L.; Ammar, M.R. Nanosecond time-resolved Raman spectroscopy for solving some Raman problems such as luminescence or thermal emission. J. Raman Spectrosc. 2018, 49, 822–829. [Google Scholar] [CrossRef]
- Post, C.; Brulisauer, S.; Waldschlaeger, K.; Hug, W.; Grueneis, L.; Heyden, N.; Schmor, S.; Foerderer, A.; Reid, R.; Reid, M.; et al. Application of Laser-Induced, Deep UV Raman Spectroscopy and Artificial Intelligence in Real-Time Environmental Monitoring-Solutions and First Results. Sensors 2021, 2, 3911. [Google Scholar] [CrossRef] [PubMed]
- Hollon, T.C.; Pandian, B.; Adapa, A.R.; Urias, E.; Save, A.V.; Khalsa, S.S.S.; Eichberg, D.G.; D’Amico, R.S.; Farooq, Z.U.; Lewis, S.; et al. Near real-time intraoperative brain tumor diagnosis using stimulated Raman histology and deep neural networks. Nat. Med. 2020, 26, 52. [Google Scholar] [CrossRef] [PubMed]
- Yan, H.; Yu, M.; Xia, J.; Zhu, L.; Zhang, T.; Zhu, Z.; Sun, G. Diverse Region-Based CNN for Tongue Squamous Cell Carcinoma Classification With Raman Spectroscopy. IEEE Access 2020, 8, 127313–127328. [Google Scholar] [CrossRef]
- Zhou, W.; Tang, Y.; Qian, Z.; Wang, J.; Guo, H. Deeply-recursive convolutional neural network for Raman spectra identification. RSC Adv. 2022, 12, 5053–5061. [Google Scholar] [CrossRef]
- Sang, X.; Zhou, R.-G.; Li, Y.; Xiong, S. One-Dimensional Deep Convolutional Neural Network for Mineral Classification from Raman Spectroscopy. Neural Process. Lett. 2022, 54, 677–690. [Google Scholar] [CrossRef]
- Fuentes, A.M.M.; Narayan, A.; Milligan, K.; Lum, J.J.J.; Brolo, A.G.G.; Andrews, J.L.L.; Jirasek, A. Raman spectroscopy and convolutional neural networks for monitoring biochemical radiation response in breast tumour xenografts. Sci. Rep. 2023, 13, 1530. [Google Scholar] [CrossRef]
- Blacksberg, J.; Alerstam, E.; Maruyama, Y.; Cochrane, C.J.; Rossman, G.R. Miniaturized time-resolved Raman spectrometer for planetary science based on a fast single photon avalanche diode detector array. Appl. Opt. 2016, 55, 739–748. [Google Scholar] [CrossRef]
- Li, Z.; Deen, M.J.; Kumar, S.; Selvaganapathy, P.R. Raman Spectroscopy for In-Line Water Quality Monitoring—Instrumentation and Potential. Sensors 2014, 14, 17275–17303. [Google Scholar] [CrossRef]
- Brooker, M.H.; Shapter, J.G. Raman Studies of the Phase-Transition in KClO3. J. Phys. Chem. Solids 1989, 50, 1087–1094. [Google Scholar] [CrossRef]
- Ghosh, M.; Wang, L.; Asher, S.A. Deep-Ultraviolet Resonance Raman Excitation Profiles of NH4NO3, PETN, TNT, HMX, and RDX. Appl. Spectrosc. 2012, 66, 1013–1021. [Google Scholar] [CrossRef]
- De La Pierre, M.; Carteret, C.; Maschio, L.; Andre, E.; Orlando, R.; Dovesi, R. The Raman spectrum of CaCO3 polymorphs calcite and aragonite: A combined experimental and computational study. J. Chem. Phys. 2014, 140, 164509. [Google Scholar] [CrossRef] [PubMed]
- Qiu, J.; Li, X.; Qi, X. Raman Spectroscopic Investigation of Sulfates Using Mosaic Grating Spatial Heterodyne Raman Spectrometer. IEEE Photonics J. 2019, 11, 6802612. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ren, W.; Wang, B.; Xie, Z.; Wang, H.; Zhu, X.; Zhao, W. An Unmanned Vehicle-Based Remote Raman System for Real-Time Trace Detection and Identification. Photonics 2023, 10, 1230. https://doi.org/10.3390/photonics10111230
Ren W, Wang B, Xie Z, Wang H, Zhu X, Zhao W. An Unmanned Vehicle-Based Remote Raman System for Real-Time Trace Detection and Identification. Photonics. 2023; 10(11):1230. https://doi.org/10.3390/photonics10111230
Chicago/Turabian StyleRen, Wenzhen, Bo Wang, Zhengmao Xie, Hui Wang, Xiangping Zhu, and Wei Zhao. 2023. "An Unmanned Vehicle-Based Remote Raman System for Real-Time Trace Detection and Identification" Photonics 10, no. 11: 1230. https://doi.org/10.3390/photonics10111230
APA StyleRen, W., Wang, B., Xie, Z., Wang, H., Zhu, X., & Zhao, W. (2023). An Unmanned Vehicle-Based Remote Raman System for Real-Time Trace Detection and Identification. Photonics, 10(11), 1230. https://doi.org/10.3390/photonics10111230