Research on the Detection Method of Projection Stellar Target Simulator

Abstract
:1. Introduction
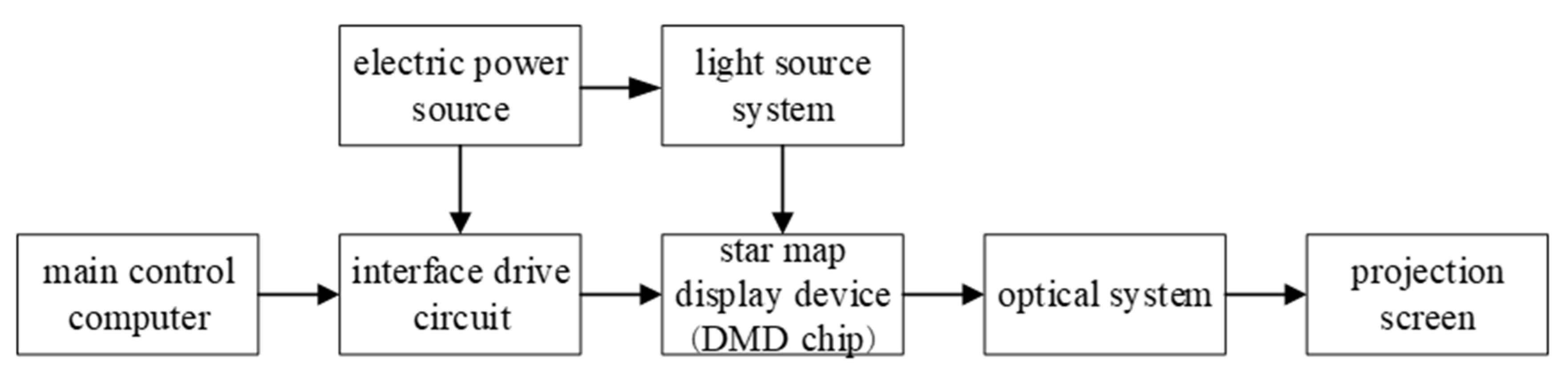
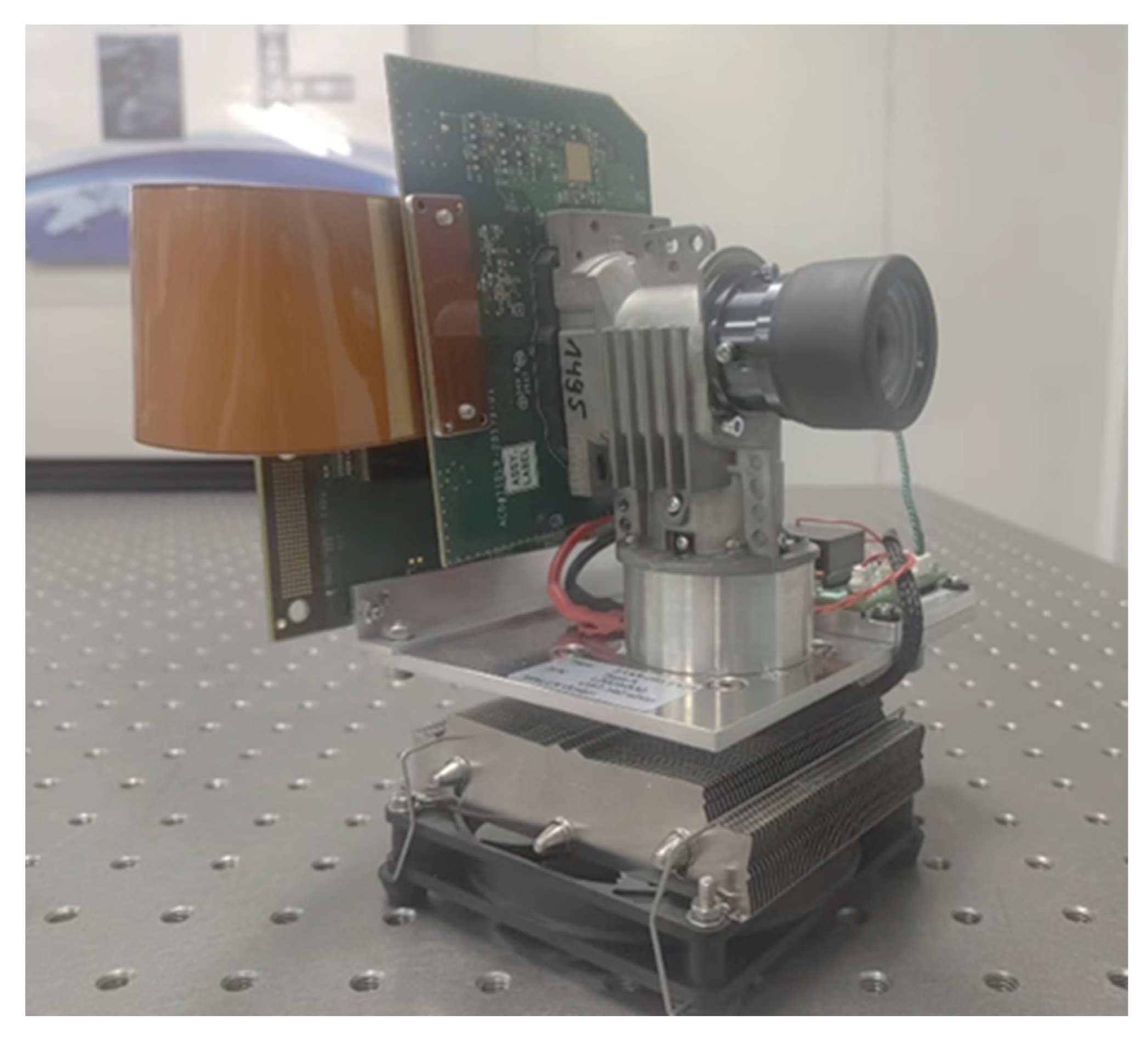
2. Projection Stellar Target Simulator Composition and Working Principle
3. Optical System Design
3.1. Design Indexes of the Optical System
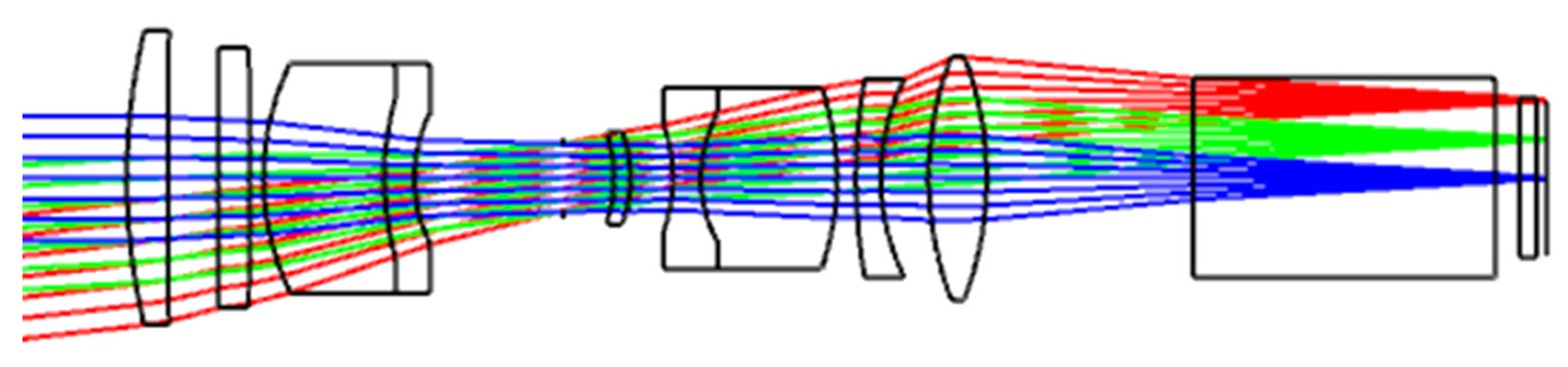
3.2. Design Result
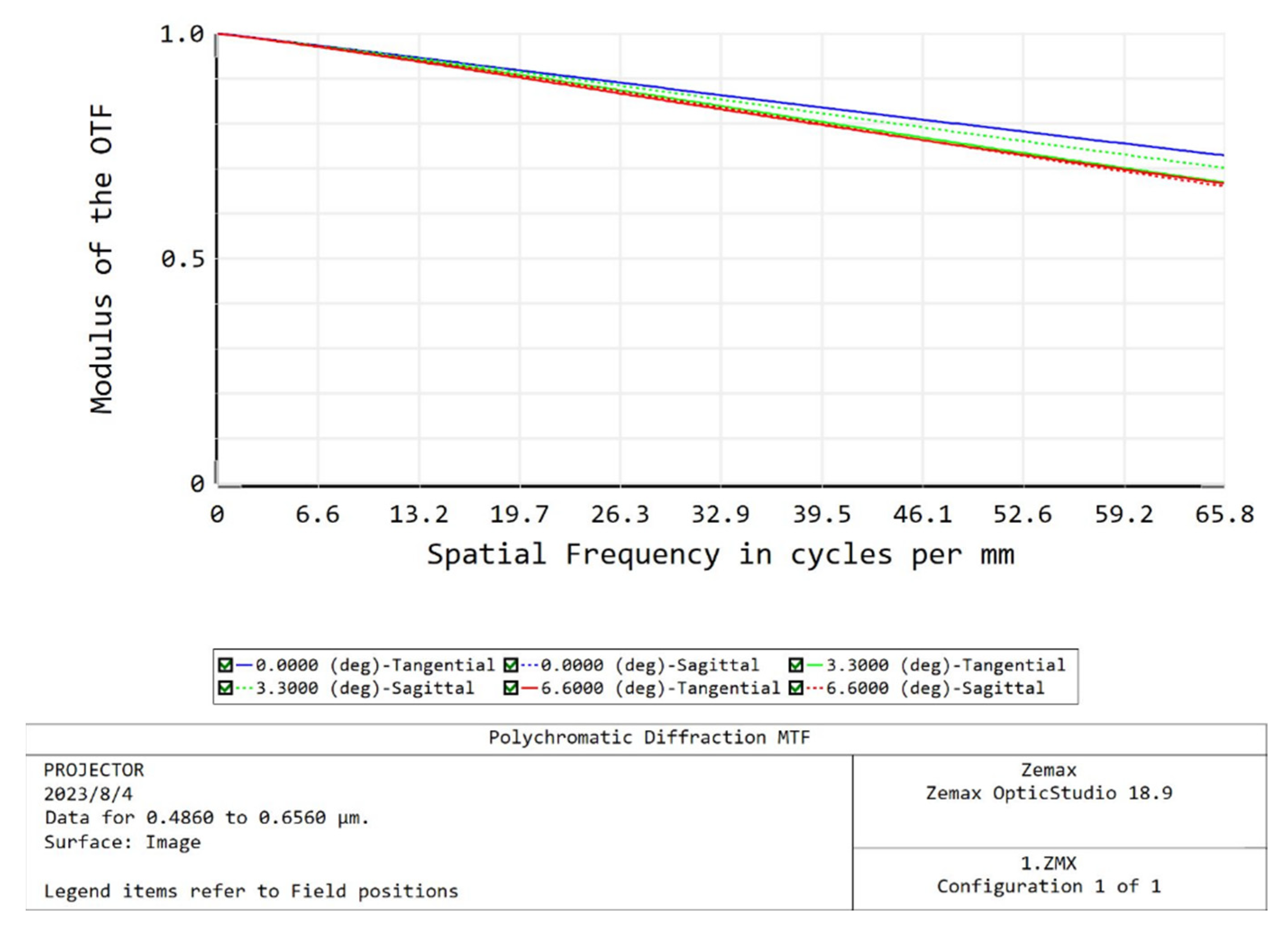
3.3. Image Quality Evaluation of the Optical System
4. Star Point Position Detection Method
4.1. Composition and Working Principle of the Detection System
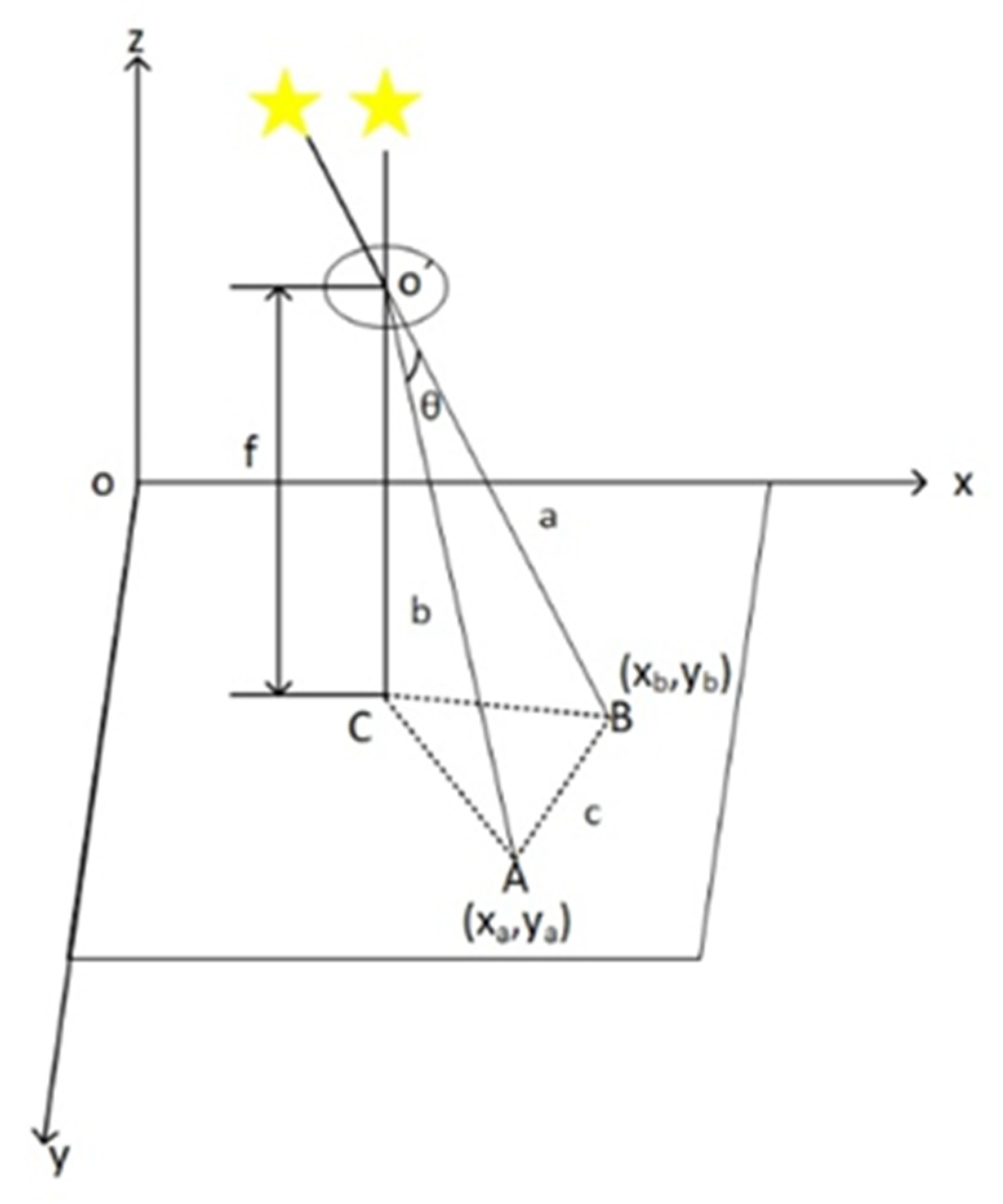
4.2. Measurement Model of Angular Distance between Stars
4.3. Accuracy Testing Experiment
4.4. Accuracy Analysis of Detection System
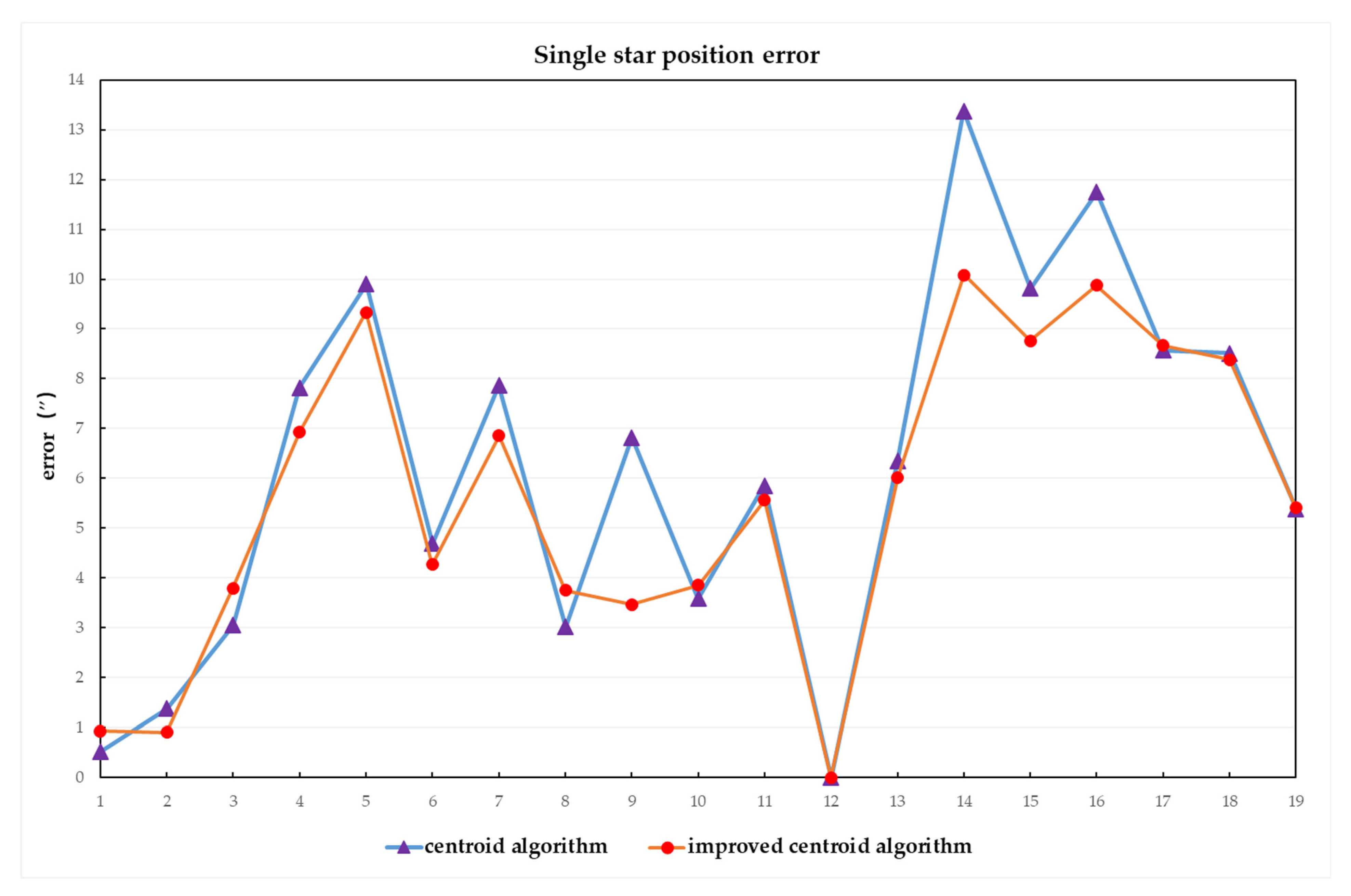
4.5. Experimental Accuracy Testing Result and Analysis
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Shuangbo, L.; Xuemei, M.; Liangyuan, H.; Chunxi, Z. Research on the development of space industry capacity of major spacefaring countries. China Aerosp. 2021, 2, 53–57. [Google Scholar]
- Hongjun, S.; Jing, M.; Yiweng, L. Analysis of the development of space strategy policy and management in the major spacefaring nations of the world. Aerosp. Ind. Manag. 2019, 8, 37–40. [Google Scholar]
- Ionescu, L.; McInnes, C.R.; Ceriotti, M. A multiple-vehicle strategy for near-Earth asteroid capture. Acta Astronaut. 2022, 199, 71–85. [Google Scholar] [CrossRef]
- Xia, Q.; Qi, N.; Ye, D.; Guo, Y.; Wang, T. Real-time calibration of space zoom cameras based on fixed stars. IET Comput. Vis. 2017, 11, 342–349. [Google Scholar] [CrossRef]
- Ting, S.; Fei, X.; Xiaochu, W.; Zheng, Y.; Daping, C. An accuracy measurement method for star trackers based on direct astronomic observation. Sci. Rep. 2016, 6, 22593. [Google Scholar]
- Wei, C.; Zhiyi, L.; Yang, Z.; Yuan, Y. Design of a visible light target simulator system based on a digital micromirror. Electron. Des. Eng. 2014, 22, 50–53. [Google Scholar]
- Zichao, Z.; Qimeng, C.; Zibo, T.; Zhe, W. Optical system design of high precision dynamic star simulator. J. Metrol. 2018, 39, 641–644. [Google Scholar]
- Yu, D.; Xin, C.; Wenming, Z.; Jie, L.; Shenlin, L. Design of optical system for large field of view long pupil distance star simulator based on DMD. Appl. Opt. 2020, 41, 891–897. [Google Scholar] [CrossRef]
- Qi, Z.; Xiping, X.; Yue, P.; Motong, H. Design of projection optical system of dynamic star simulator with long pupil distance. J. Chang. Univ. Sci. Technol. 2021, 44, 13–18. [Google Scholar]
- Yungchih, H.; Juiwen, P. High contrast ratio and compact-sized prism for DLP projection system. Opt. Express 2014, 22, 17016–17029. [Google Scholar]
- Yang, Q.; Xiping, X.; Tao, L.; Yue, P. Design of a high-numerical-aperture digital micromirror device camera with high dynamic range. Appl. Opt. 2015, 54, 60–70. [Google Scholar]
- Zhuo, L.; Da, M.; Shilong, L.; Qiang, Z. Design of long wave infrared zoom projection system based on DMD. Infrared Laser Eng. 2016, 45, 348–353. [Google Scholar]
- Irie, K.; Mckinnon, E.A.; Unsworth, K.; Woodhead, I.M. Measurement of digital camera image noise for imaging applications. Sens. Transducers 2008, 90, 185–194. [Google Scholar]
- Changcai, H.; Guzhou, S.; Jiming, M.; Xiaoping, O.Y. Noise calibration and characterization of scientific grade CCD camera. Mod. Appl. Phys. 2014, 5, 233–238. [Google Scholar]
- Jain, P.; Tyagi, V. A survey of edge-preserving image denoising methods. Inf. Syst. Front. 2016, 18, 159–170. [Google Scholar] [CrossRef]
- Silva, R.D.; Minetto, R.; Schwartz, W.R.; Pedrini, H. Adaptive edge-preserving image denoising using wavelet transforms. Pattern Anal. Appl. 2013, 16, 567–580. [Google Scholar] [CrossRef]
- Jaiswal, A.; Upadhyay, J.; Somkuwar, A. Image denoising and quality measurements by using filtering and wavelet based techniques. AEUE-Int. J. Electron. Commun. 2014, 68, 699–705. [Google Scholar] [CrossRef]
- Vali, M.A.; Mohammad, S.M.; Sadegh, S.; Farshad, S. Improving night sky star image processing algorithm for star sensors. J. Opt. Soc. Am. 2014, 31, 794. [Google Scholar]
- Yulei, Y.; Yong, Z. A threshold algorithm for star point extraction of large field of view star maps. Oceanogr. Surv. Mapp. 2011, 31, 41–43. [Google Scholar]
- Xu, W.; Li, Q.; Feng, H.; Xu, Z.; Chen, Y. A novel star image thresholding method for effective segmentation and centroid statistics. Opt.-Int. J. Light Electron Opt. 2013, 124, 4673–4677. [Google Scholar] [CrossRef]
- Jiangsheng, Z.; Liheng, F.; Lili, G. Research on subpixel localization method of star image. Electron. Des. Eng. 2012, 20, 186–189. [Google Scholar]
- Sun, J.; Li, G.R.; Wen, D.S.; Xue, B.; Yang, S.D. A sub-pixel centroid algorithm for star image based on gaussian distribution. Transations Jpn. Soc. Aeronaut. Space Sci. 2011, 53, 307–310. [Google Scholar] [CrossRef]
- Ruiming, J.; Xiaolei, M.; Yuncai, H. Research on star point subdivision localization method based on skewed normal distribution. Adv. Lasers Optoelectron. 2016, 53, 140–147. [Google Scholar]
- Ming, Y.; Fei, X.; Ting, S.; Hong, W. Research on calibration method of high precision star sensor. J. Instrum. 2017, 38, 2154–2160. [Google Scholar]
- Tianjiao, L.; Suning, L.; Sai, L.; Yuan, Y.; Heping, T. Correction model for microlens array assembly error in light field camera. Opt. Express 2016, 24, 24524–24543. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Designation | Index |
|---|---|
| Field of view | 13.2° |
| Focal length | 32.5 mm |
| Pupil diameter | 6.135 mm |
| Spectral range | 400–780 nm |
| Single star position error | 18″ |
| Star Point Serial Number | Actual Coordinates of Star Points | Centroid Algorithm | Improved Centroid Algorithm | |||
|---|---|---|---|---|---|---|
| x | y | x | y | x | y | |
| 1 | 1336 | 2826 | 1336.1922 | 2826.1846 | 1336.1729 | 2826.2447 |
| 2 | 1372 | 2135 | 1372.1048 | 2135.2968 | 1372.1369 | 2135.3103 |
| 3 | 1392 | 1496 | 1392.1352 | 1496.5745 | 1392.2085 | 1496.6201 |
| 4 | 1408 | 791 | 1408.2231 | 791.46631 | 1408.2022 | 791.47477 |
| 5 | 1469 | 127 | 1469.6654 | 127.49211 | 1469.6605 | 127.51102 |
| 6 | 1640 | 2497 | 1640.4957 | 2497.509 | 1640.4633 | 2497.5129 |
| 7 | 1648 | 1735 | 1648.5234 | 1734.9127 | 1648.6043 | 1735.1214 |
| 8 | 1684 | 1121 | 1684.1269 | 1121.1555 | 1684.0504 | 1121.3195 |
| 9 | 1709 | 447 | 1709.252 | 447.43525 | 1709.1133 | 447.28922 |
| 10 | 1876 | 2833 | 1876.7075 | 2833.8176 | 1876.7261 | 2833.8483 |
| 11 | 1894 | 2137 | 1894.5832 | 2137.4373 | 1894.5445 | 2137.4647 |
| 12 | 1907 | 1500 | 1907.9385 | 1500.0365 | 1907.9631 | 1500.0846 |
| 13 | 1938 | 819 | 1938.6922 | 819.48778 | 1938.6844 | 819.51332 |
| 14 | 1967 | 162 | 1967.0791 | 161.92951 | 1967.0465 | 161.75751 |
| 15 | 2414 | 2829 | 2414.4933 | 2829.5259 | 2414.49 | 2829.5101 |
| 16 | 2426 | 1515 | 2426.2186 | 1515.5798 | 2426.2397 | 1515.6004 |
| 17 | 2427 | 2137 | 2427.9021 | 2137.9827 | 2427.945 | 2138.0245 |
| 18 | 2443 | 855 | 2443.6447 | 855.89304 | 2443.677 | 855.9584 |
| 19 | 2468 | 170 | 2468.2177 | 170.7659 | 2468.2244 | 170.80526 |
| Central Star Point Serial Number | Other Star Points Serial Number | Theoretical Angular Distance (°) | Centroid Algorithm (°) | Improved Centroid Algorithm (°) |
|---|---|---|---|---|
| 12 | 1 | 6.07995485 | 6.08009815 | 6.080214998 |
| 12 | 2 | 3.509126274 | 3.509510293 | 3.509378025 |
| 12 | 3 | 2.181529191 | 2.180680837 | 2.180475046 |
| 12 | 4 | 3.666401384 | 3.664227371 | 3.664475141 |
| 12 | 5 | 6.080199948 | 6.077450814 | 6.077606893 |
| 12 | 6 | 4.354047766 | 4.355352061 | 4.355233855 |
| 12 | 7 | 1.481470743 | 1.479286228 | 1.479565122 |
| 12 | 8 | 1.861321292 | 1.860483077 | 1.860278771 |
| 12 | 9 | 4.525499116 | 4.523604477 | 4.524536413 |
| 12 | 10 | 5.617217734 | 5.616220121 | 5.616145572 |
| 12 | 11 | 2.690230578 | 2.691857991 | 2.69177591 |
| 12 | 12 | 0 | 0 | 0 |
| 12 | 13 | 2.880696274 | 2.878933432 | 2.879022693 |
| 12 | 14 | 5.653217524 | 5.649501828 | 5.650415366 |
| 12 | 15 | 5.979594104 | 5.982320776 | 5.982027314 |
| 12 | 16 | 2.146112508 | 2.149374652 | 2.148856121 |
| 12 | 17 | 3.468284657 | 3.470664954 | 3.470691687 |
| 12 | 18 | 3.534607514 | 3.536971698 | 3.536936584 |
| 12 | 19 | 6.076426761 | 6.077925235 | 6.077931192 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kang, J.; Zheng, R.; Wang, L.; Pang, C.; Li, G. Research on the Detection Method of Projection Stellar Target Simulator. Photonics 2023, 10, 1101. https://doi.org/10.3390/photonics10101101
Kang J, Zheng R, Wang L, Pang C, Li G. Research on the Detection Method of Projection Stellar Target Simulator. Photonics. 2023; 10(10):1101. https://doi.org/10.3390/photonics10101101
Chicago/Turabian StyleKang, Jianan, Ru Zheng, Lingyun Wang, Chengwei Pang, and Guangxi Li. 2023. "Research on the Detection Method of Projection Stellar Target Simulator" Photonics 10, no. 10: 1101. https://doi.org/10.3390/photonics10101101
APA StyleKang, J., Zheng, R., Wang, L., Pang, C., & Li, G. (2023). Research on the Detection Method of Projection Stellar Target Simulator. Photonics, 10(10), 1101. https://doi.org/10.3390/photonics10101101