

Swing Steadiness Regulation of Electric Vehicles with Improved Neural Network PID Algorithm

Abstract
:1. Introduction
2. Related Works
3. Research on EV Steering Regulation Based on Improved Neural Network PID
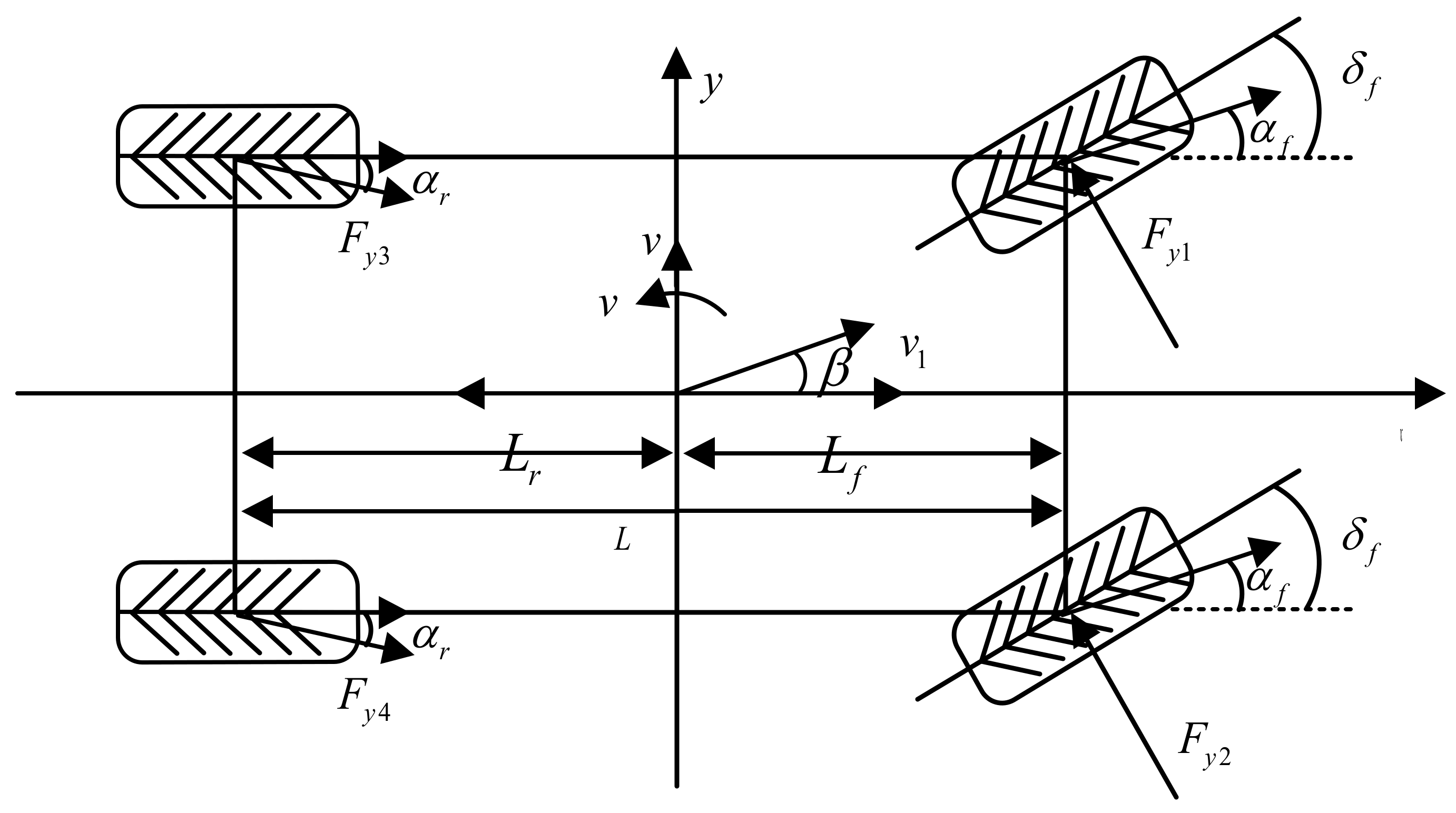
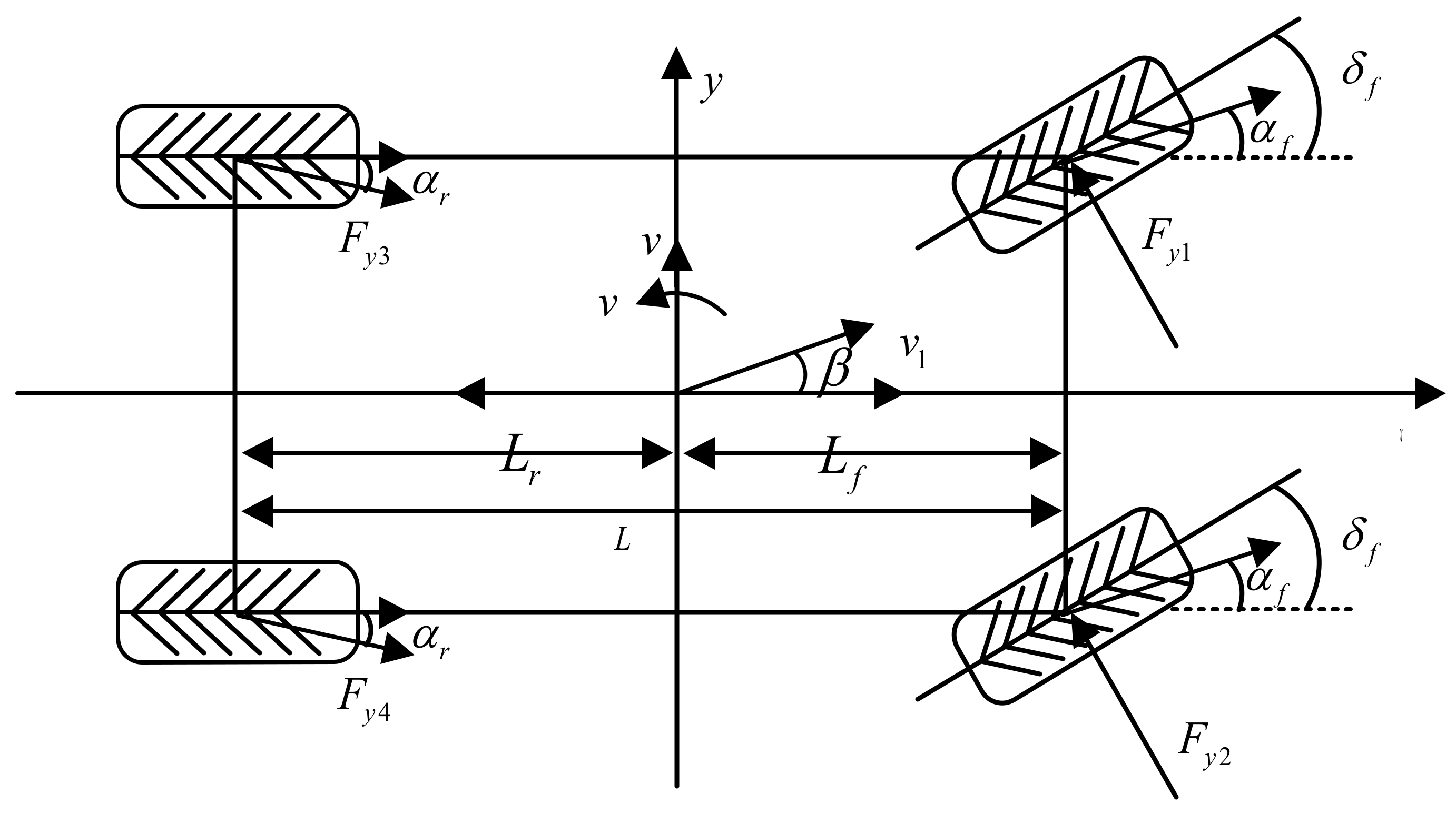
3.1. EV Dynamics Modeling
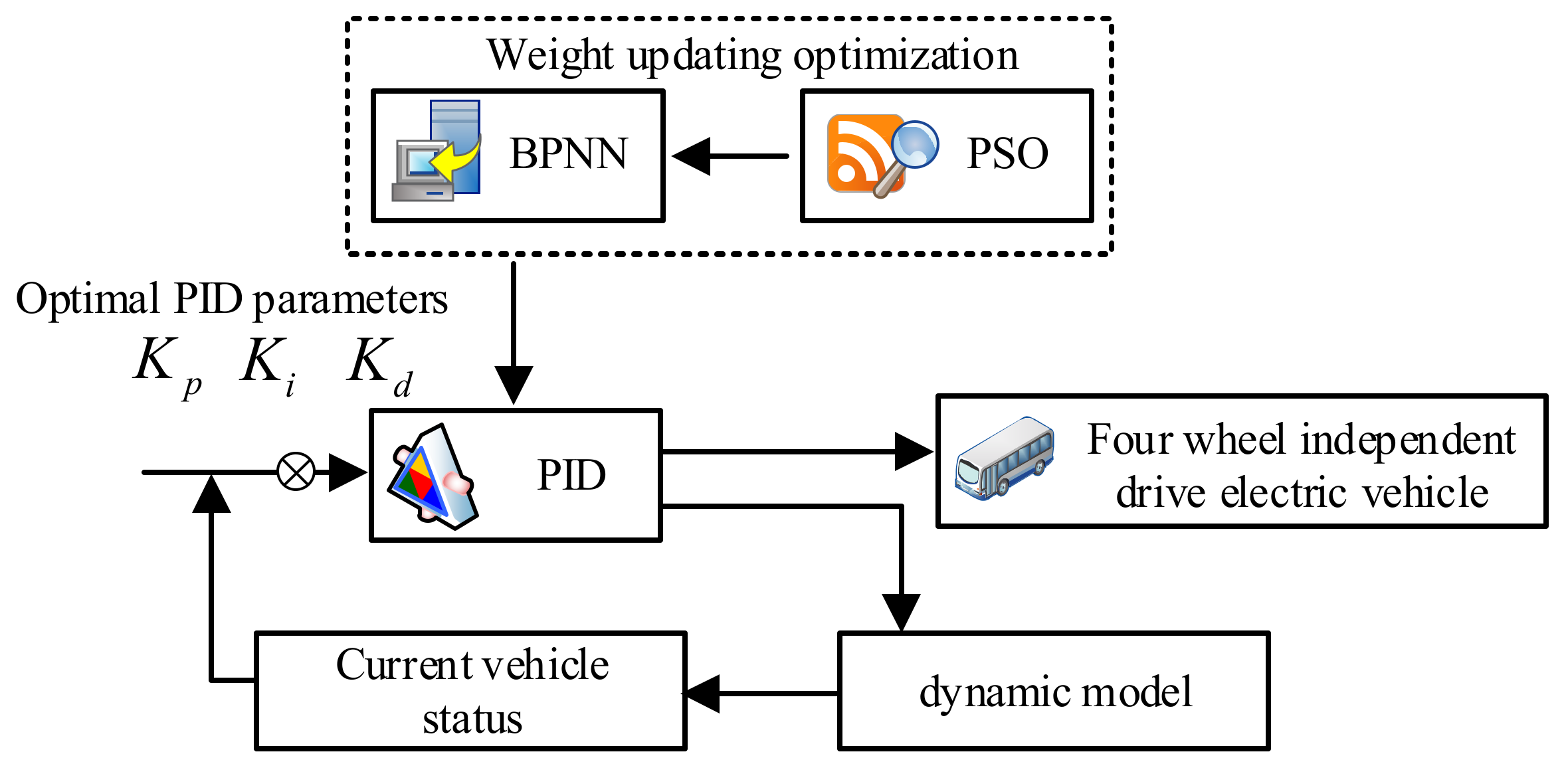
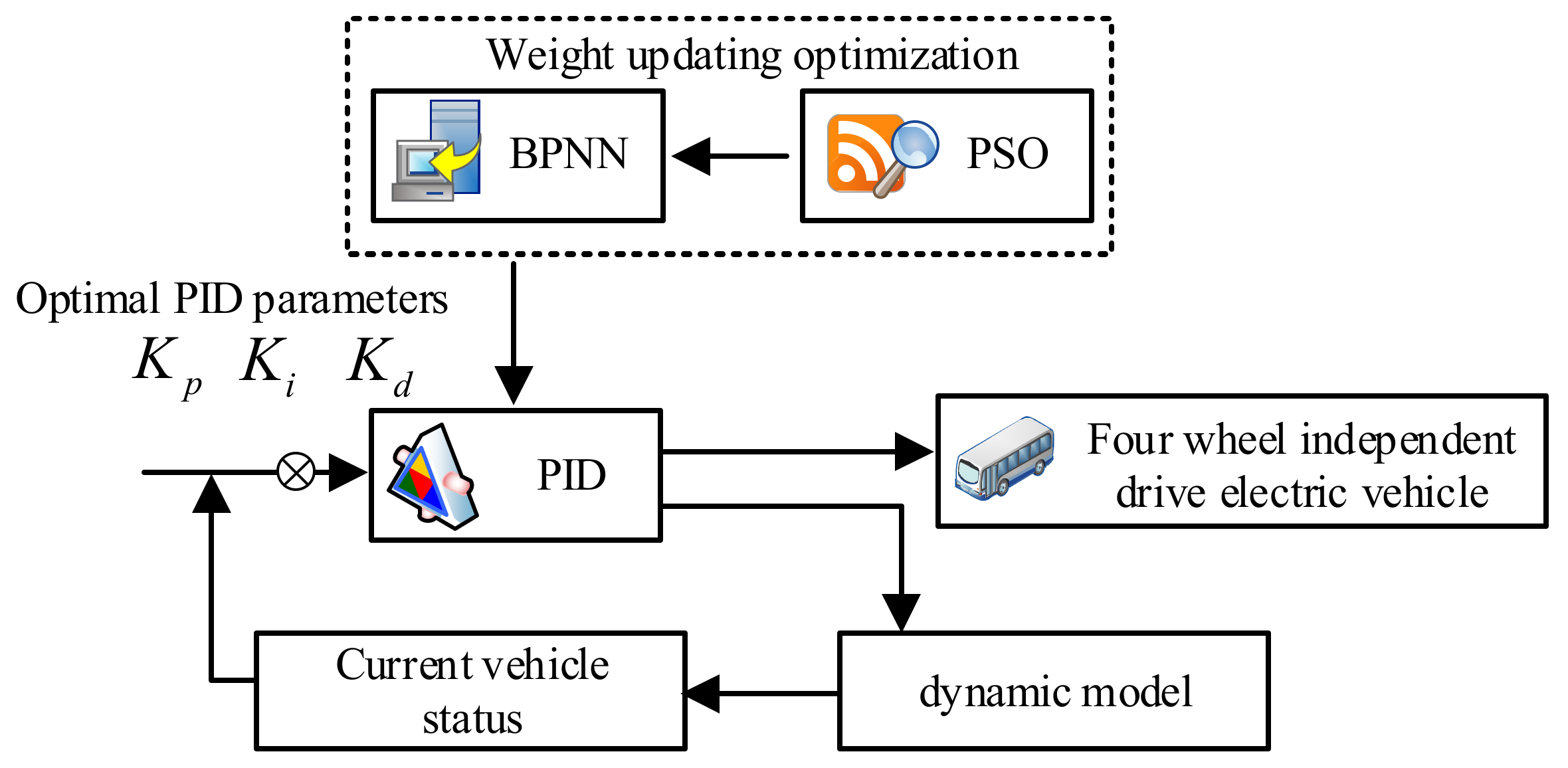
3.2. Design of a Cross-Swing Torque Regulator Based on Improved Neural Network PID
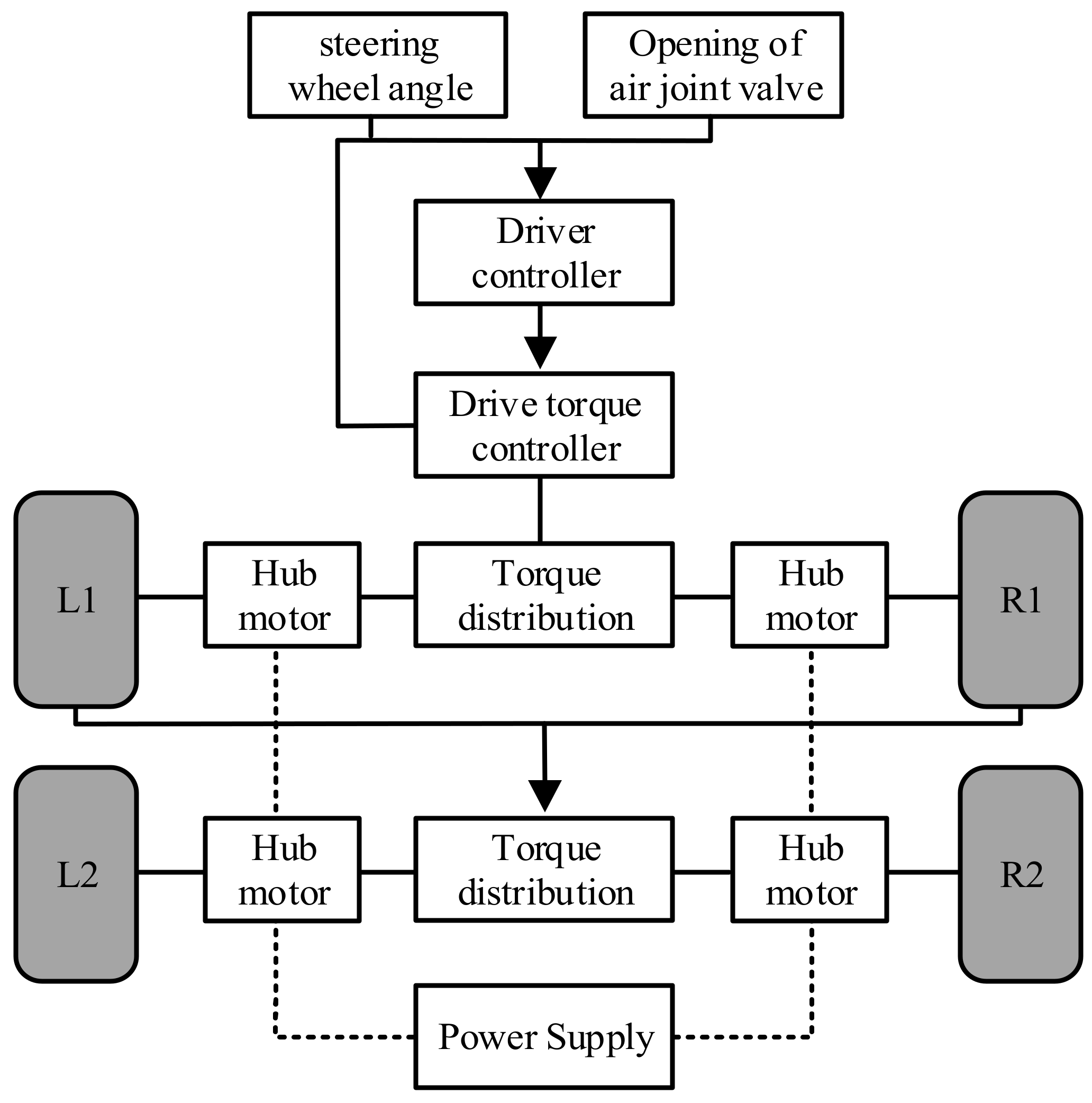
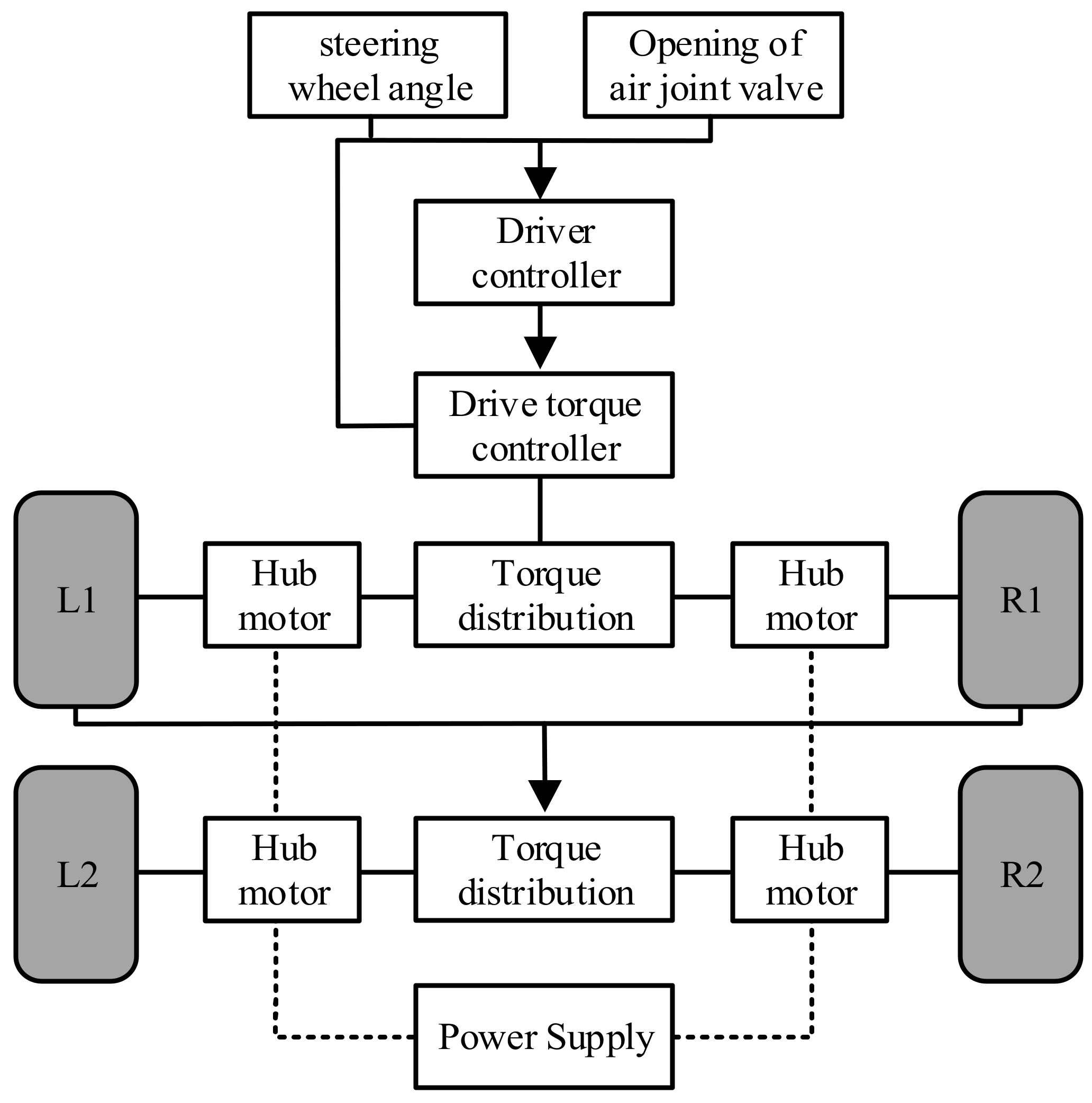
3.3. Torque Distribution for the Steering Condition
4. Analysis of the Steering Steadiness Regulation Effect of EV
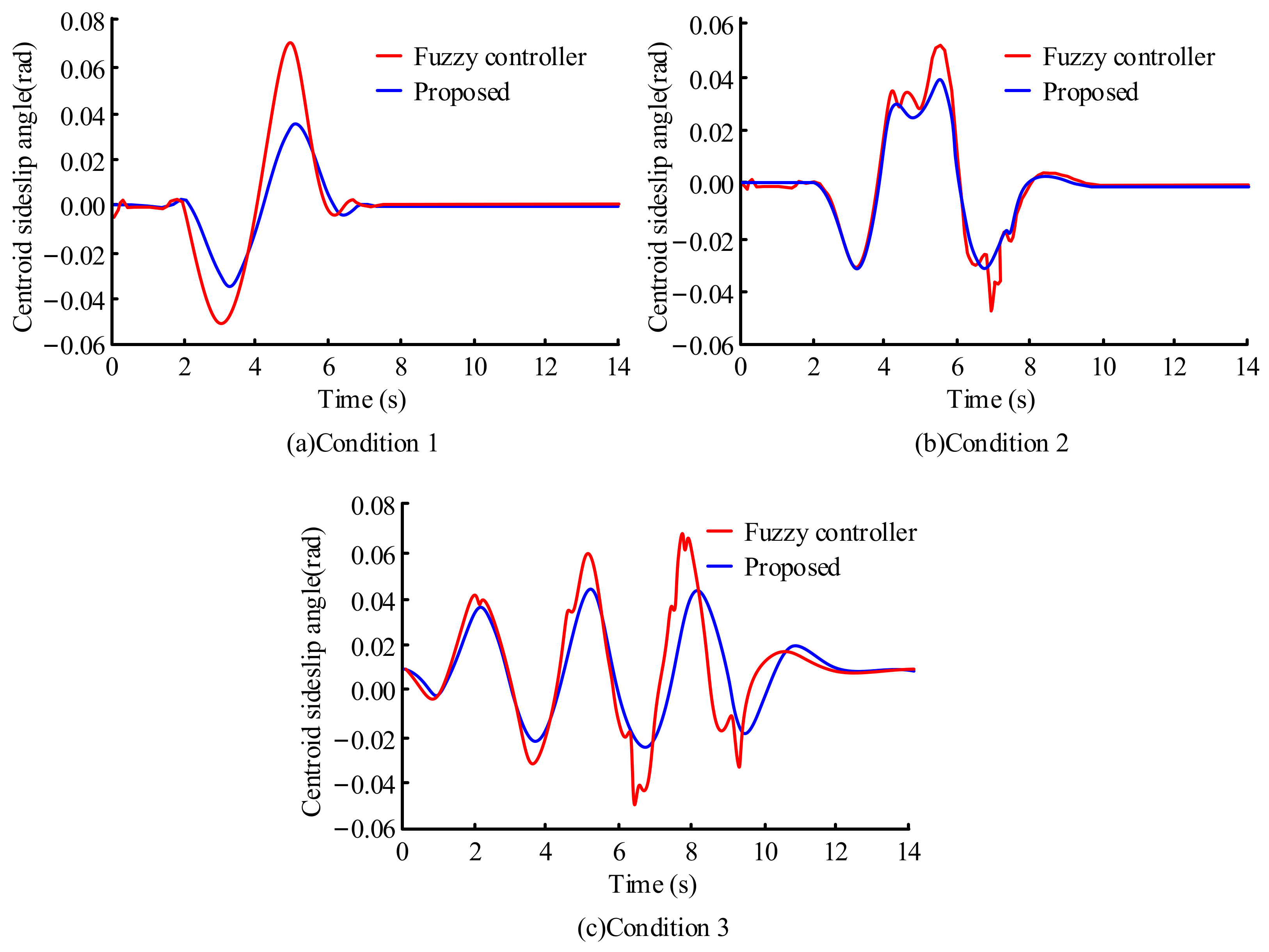
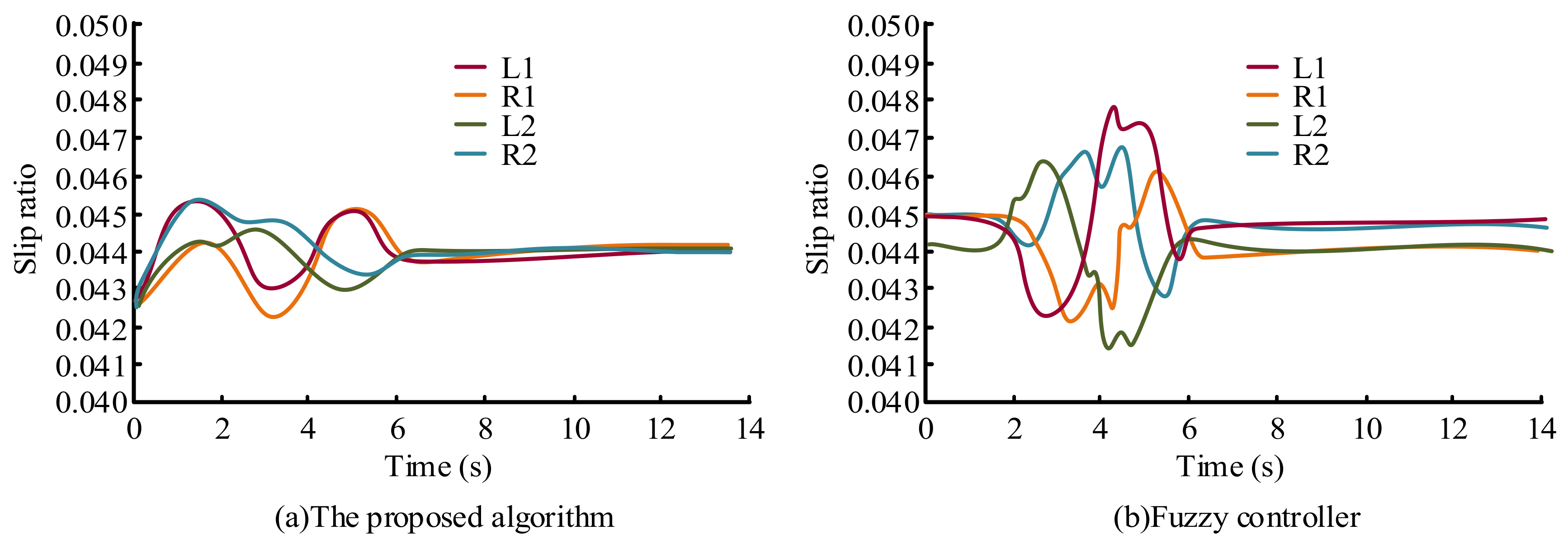
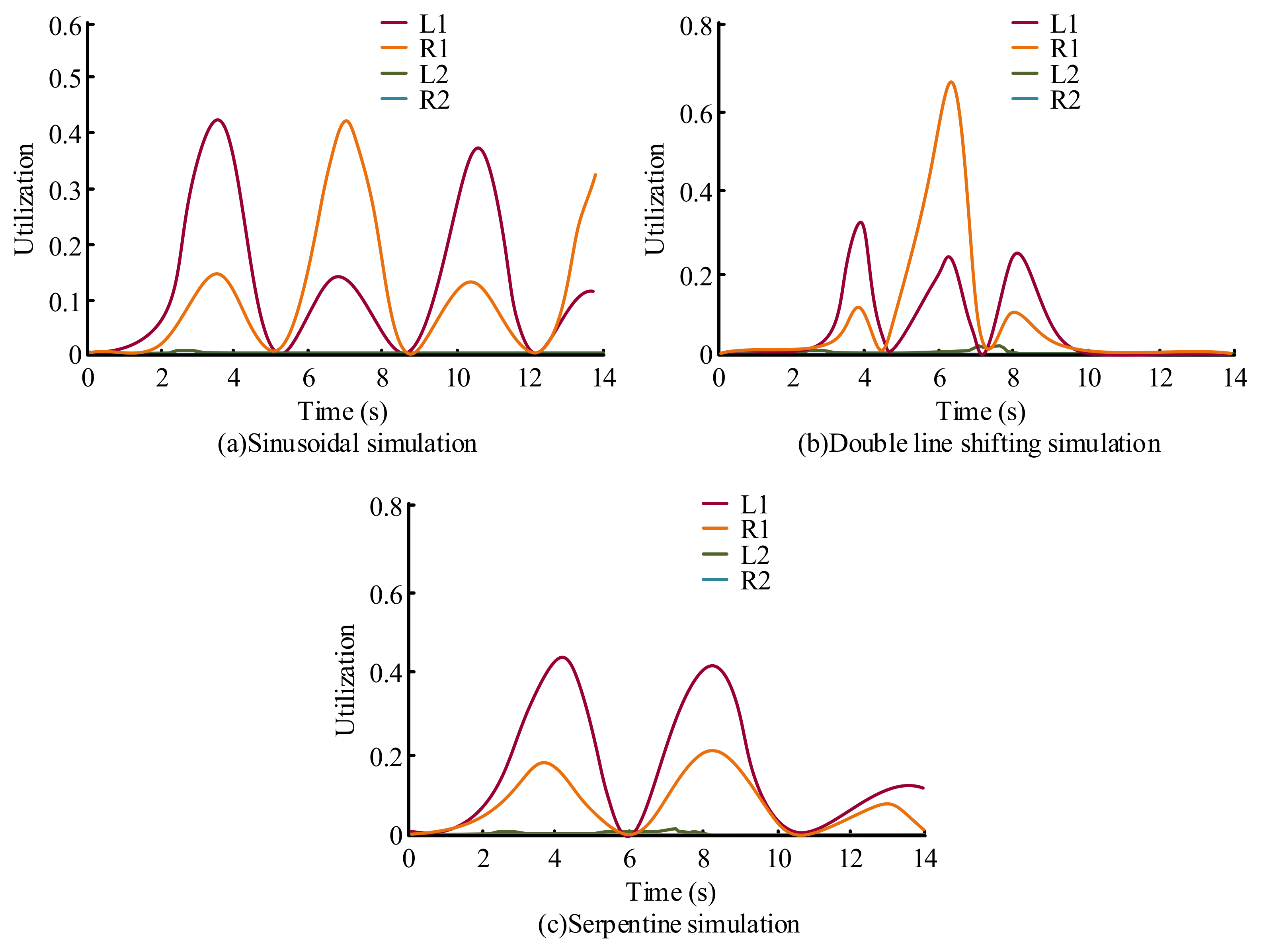
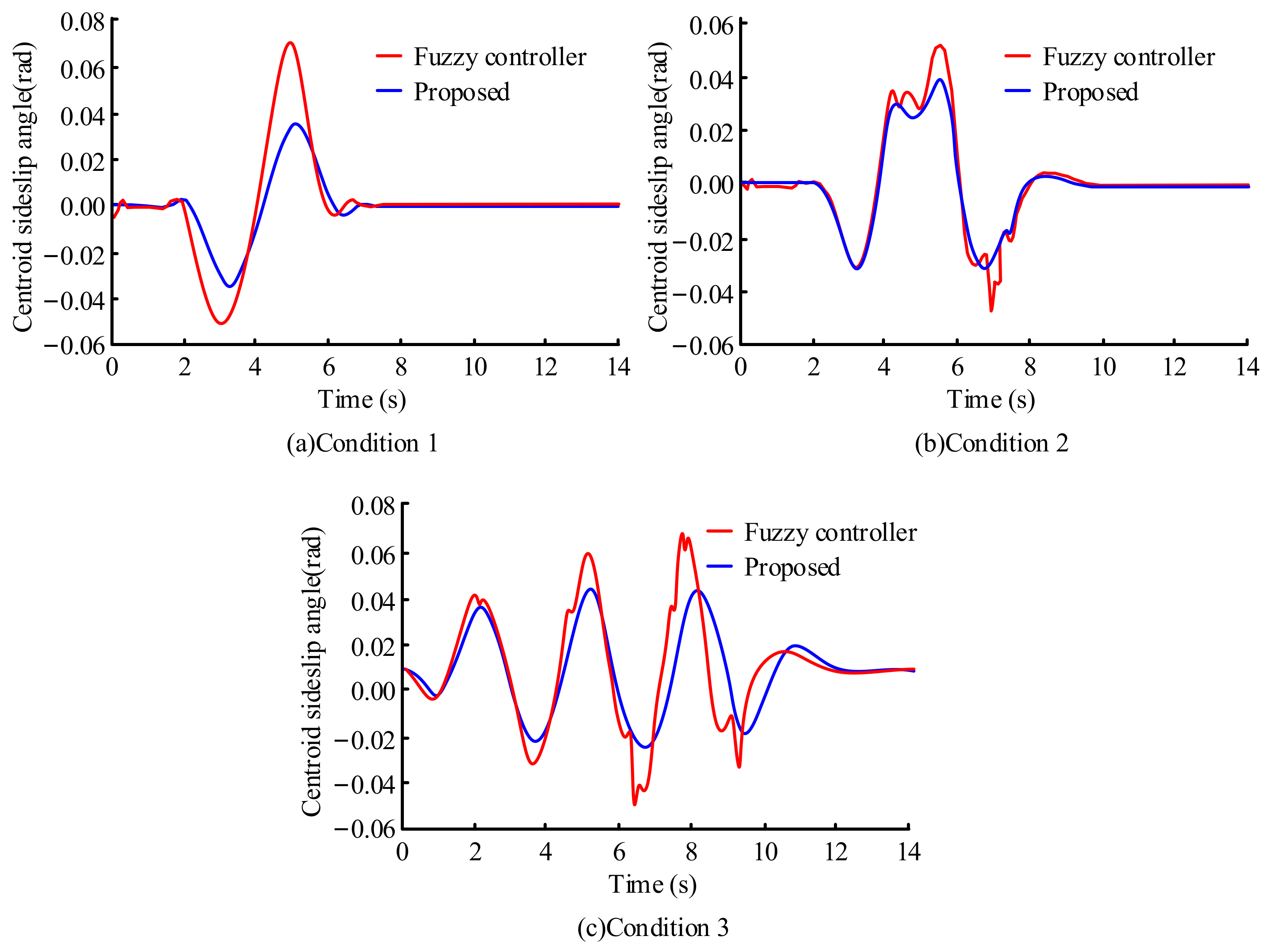
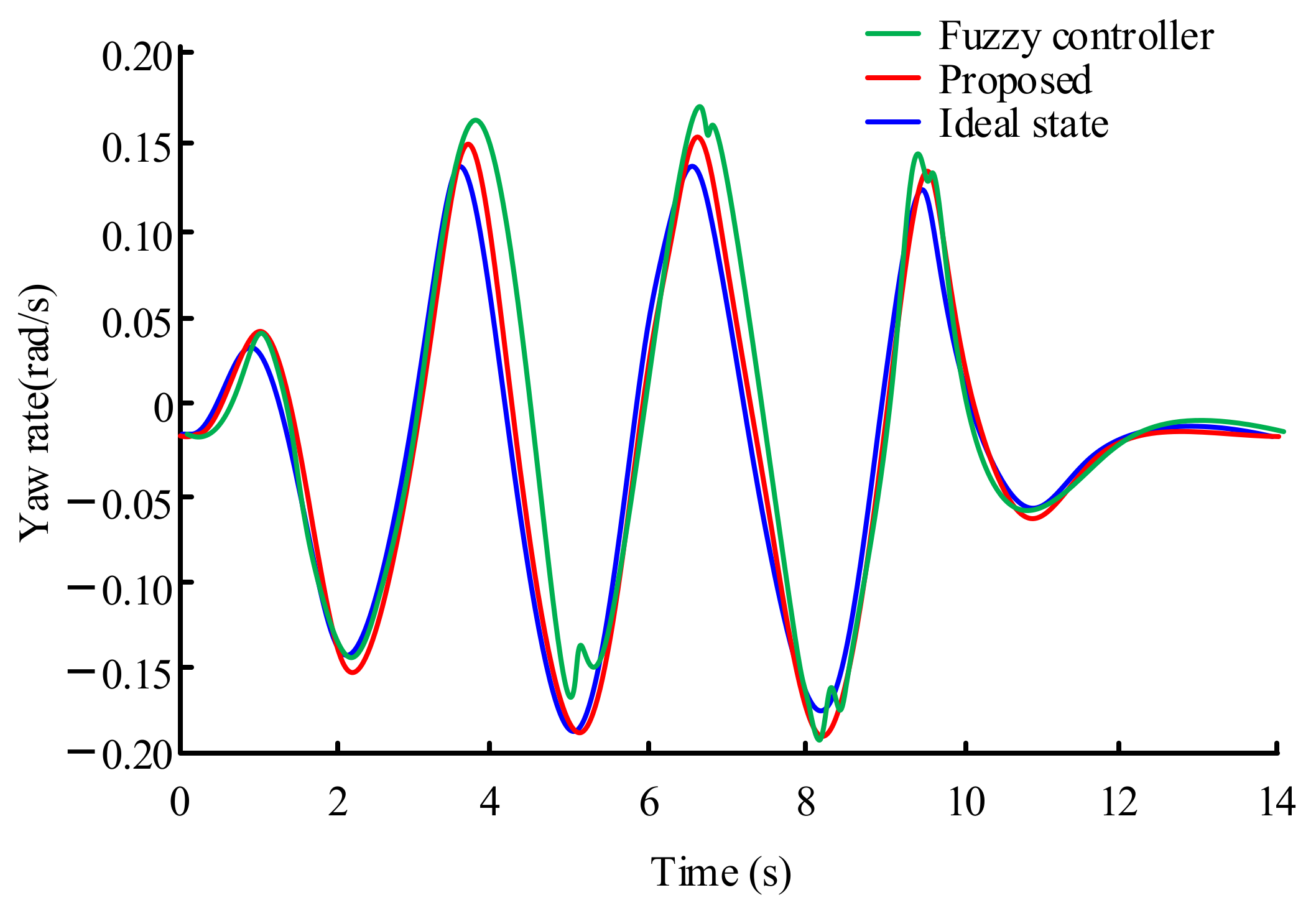
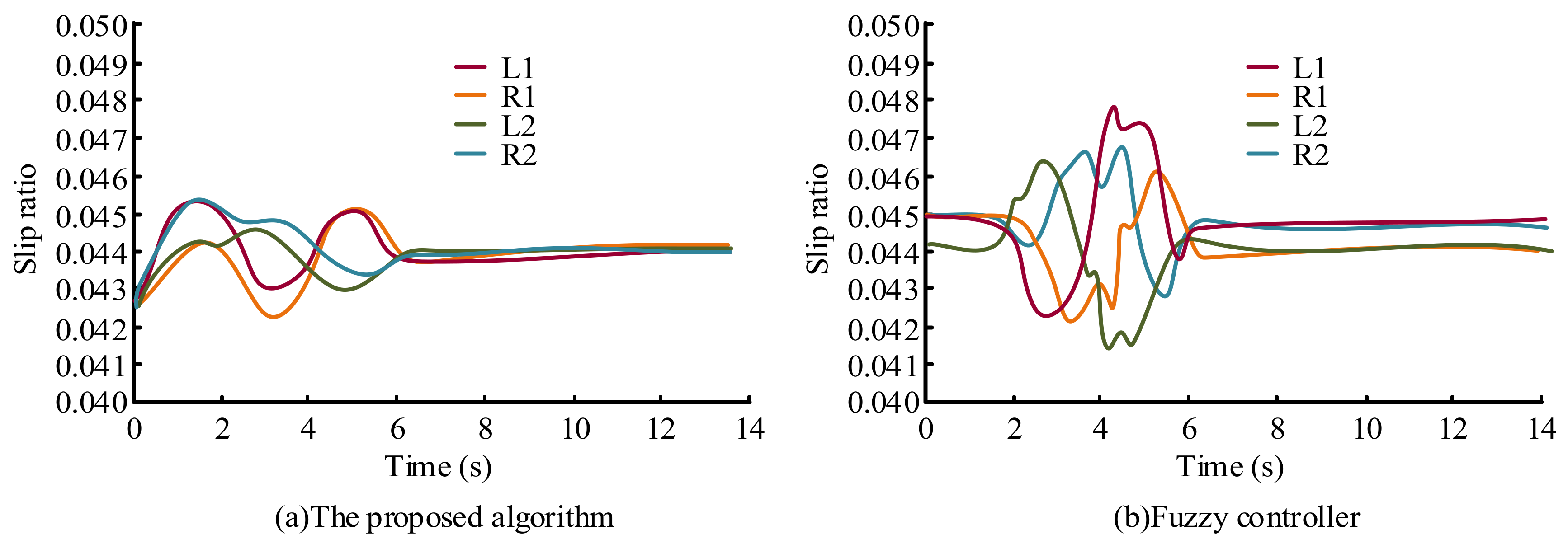
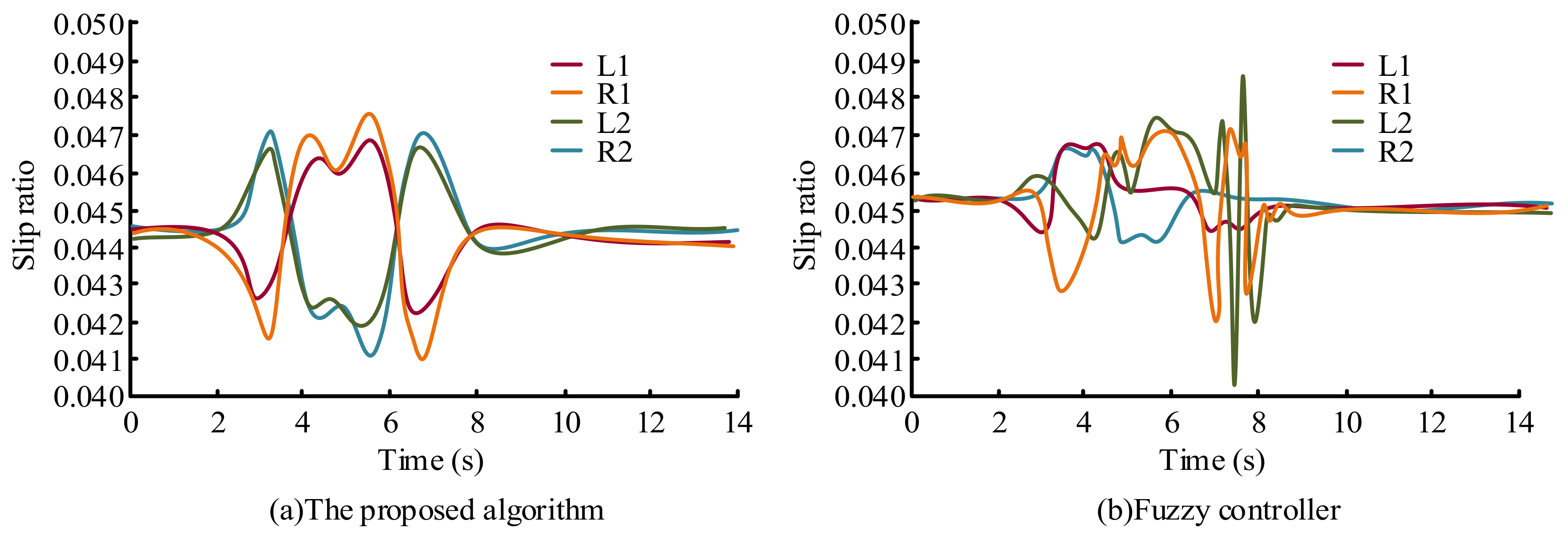
4.1. Analysis of Steering Steadiness Regulation Effects
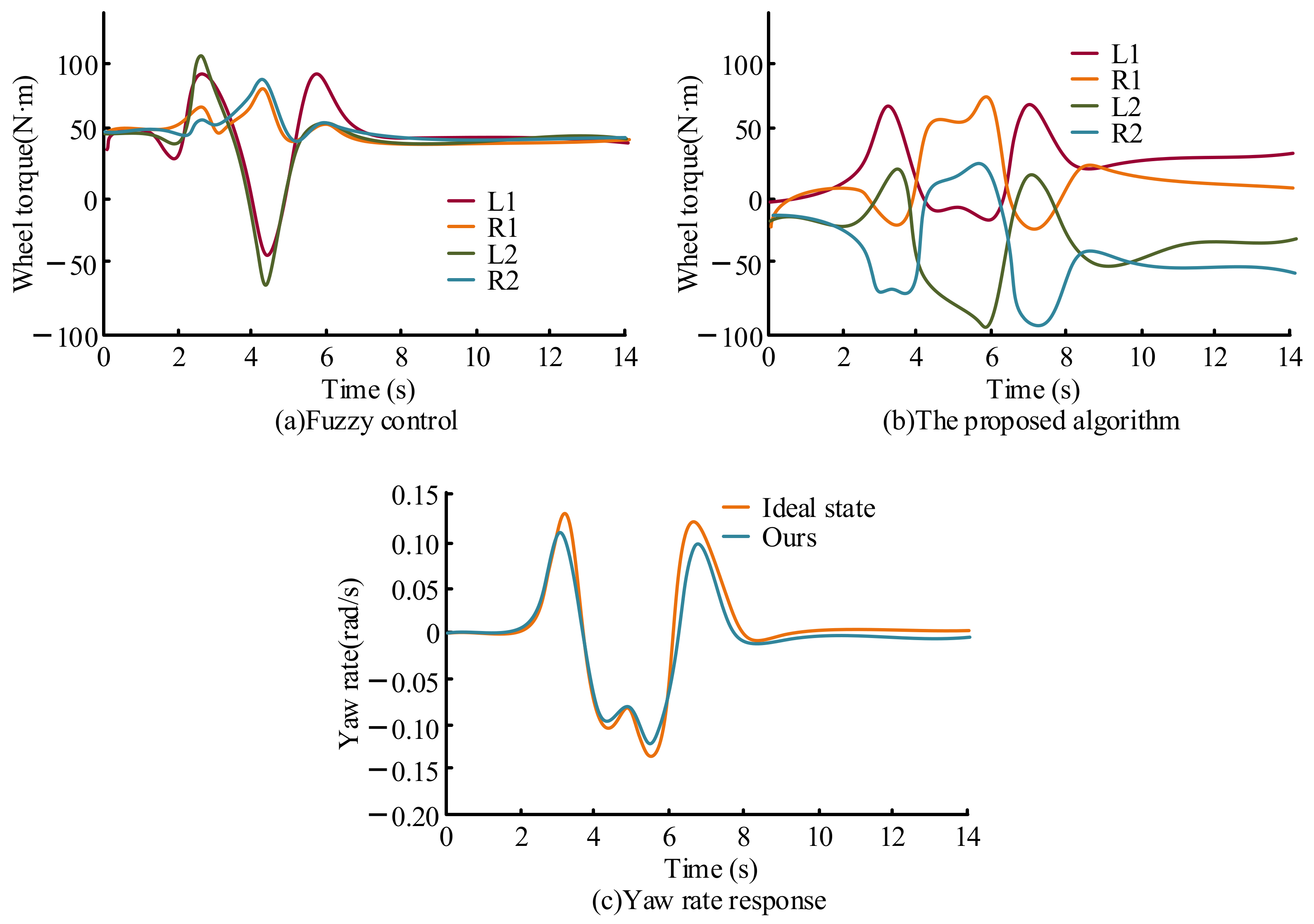
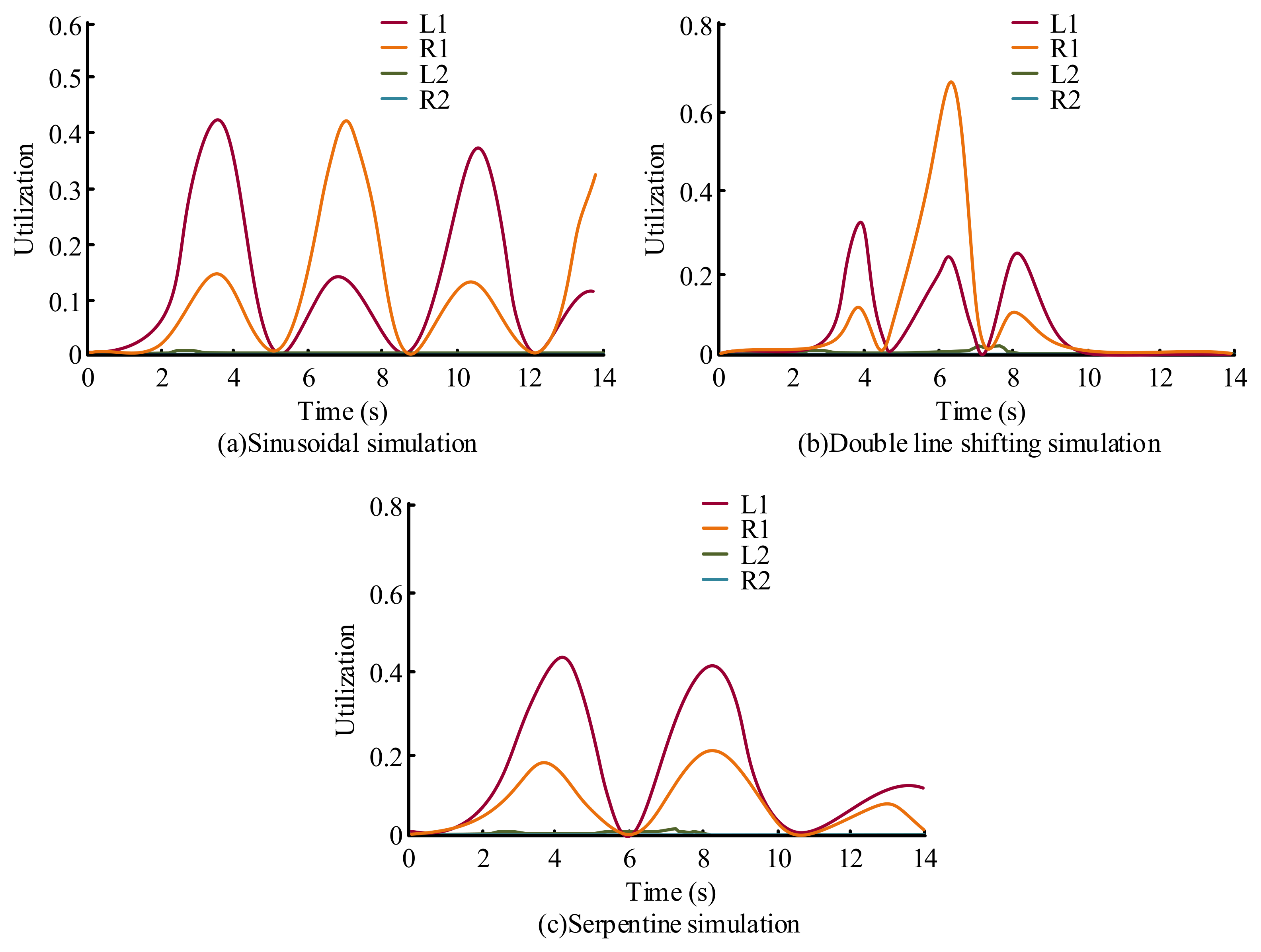
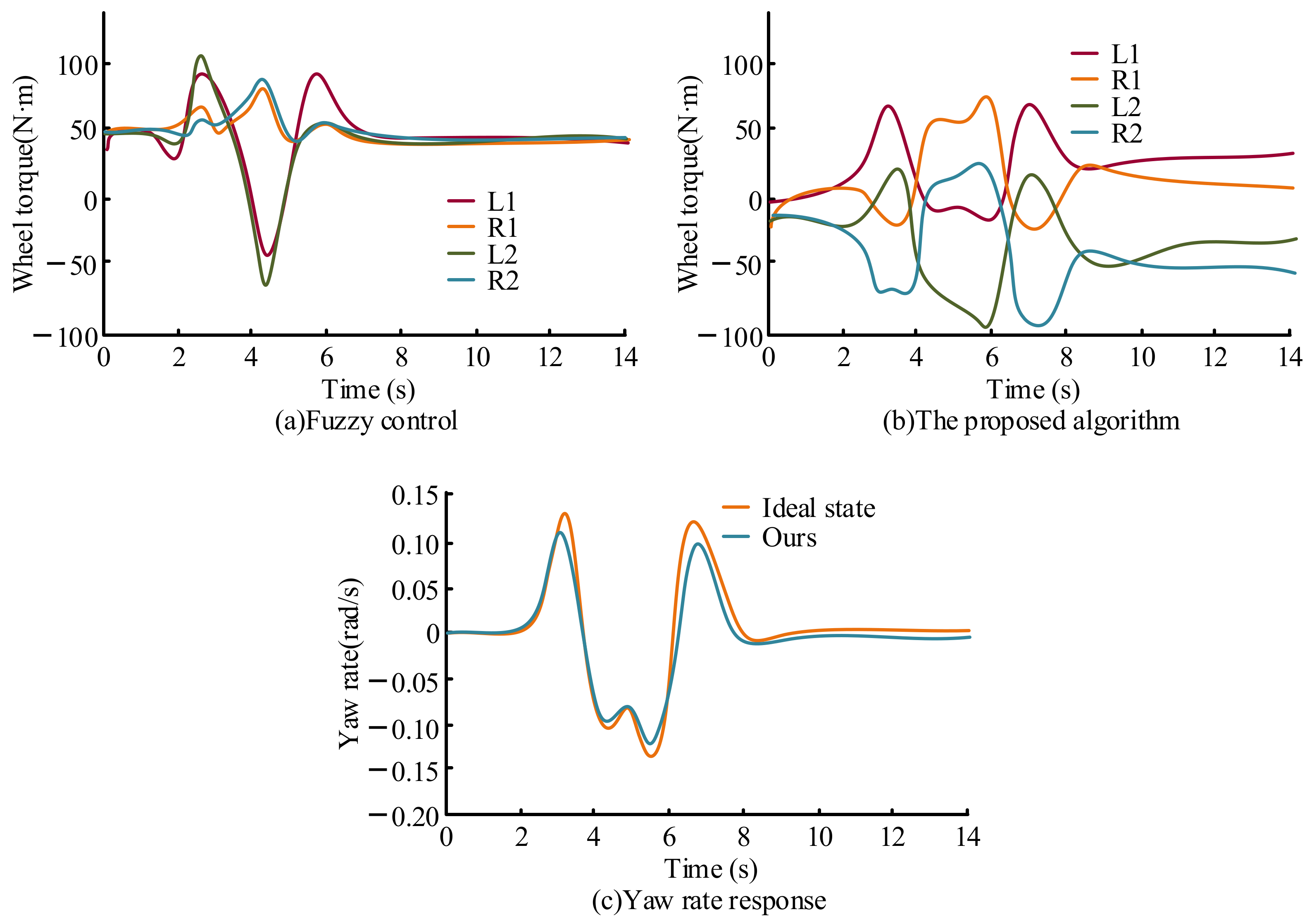
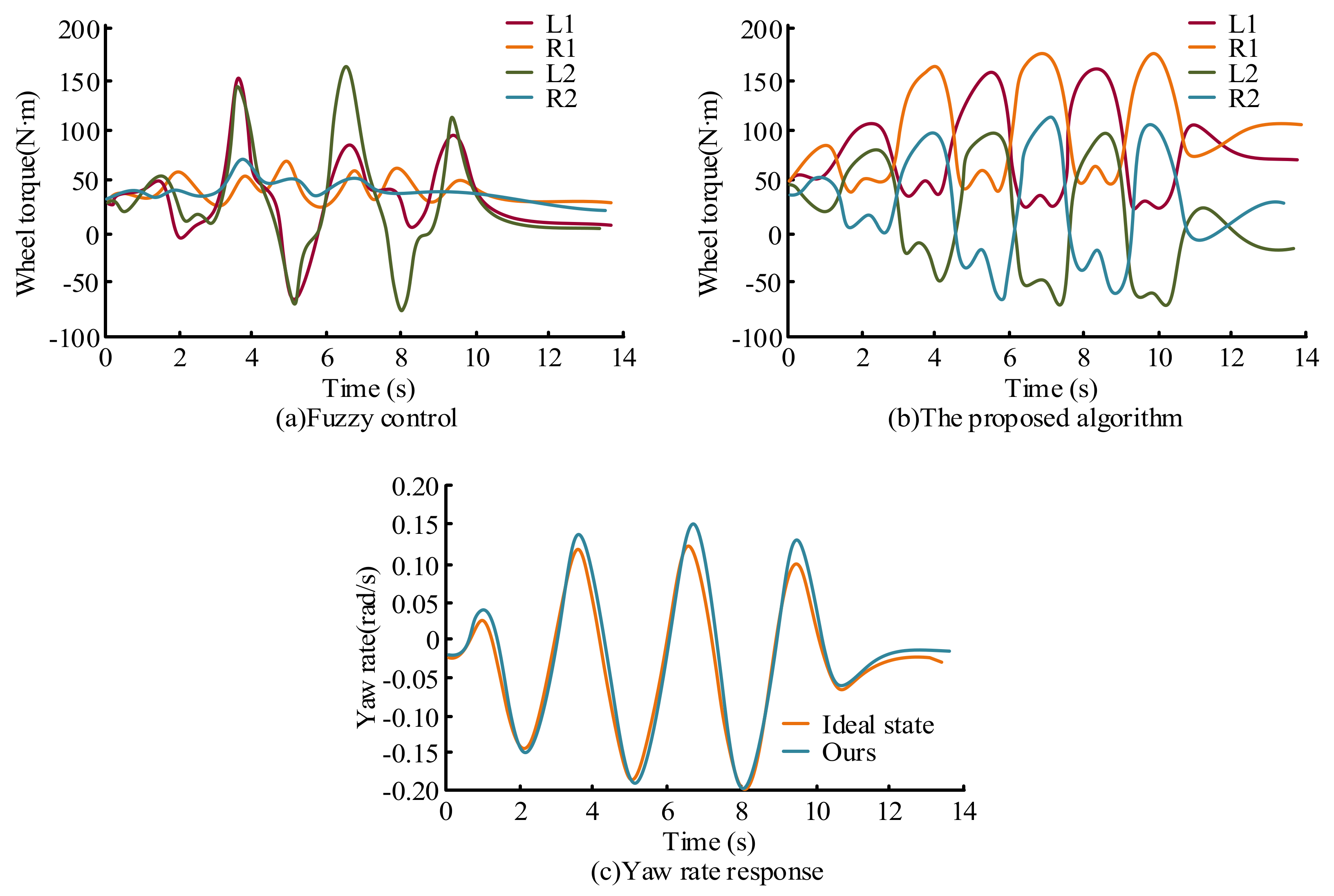
4.2. Analysis of EV Torque Distribution Effects
4.3. Actual Application Analysis of the Whole Vehicle
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Kim, S.; Park, D.J.; Chang, D.E. RAPIDO: A rejuvenating adaptive PID-type optimiser for deep neural networks. Electron. Lett. 2019, 55, 899–901. [Google Scholar] [CrossRef]
- Gao, J.L. Research on boiler water supply control system based on at89c55 and fractional order PID algorithm. Procedia Comput. Sci. 2019, 154, 173–180. [Google Scholar] [CrossRef]
- Murugesan, R.; Marimuthu, T. Temperature control in plastic extrusion using gaussian offset opposition based whale optimization algorithm. Solid State Technol. 2020, 63, 21411–21426. [Google Scholar]
- Xu, W.; Chen, H.; Zhao, H.; Ren, B. Torque optimization control for electric vehicles with four in-wheel motors equipped with regenerative braking system. Mechatronics 2019, 57, 95–108. [Google Scholar] [CrossRef]
- Yan, T.; Zheng, K.; Zhao, W.; Song, T. A novel IMC-FOF design for four wheel steering systems of distributed drive electric vehicles. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2022, 236, 842–856. [Google Scholar]
- Tian, Y.; Cao, X.; Wang, X.; Zhao, Y. Four wheel independent drive electric vehicle lateral stability control strategy. IEEE/CAA J. Autom. Sin. 2019, 7, 1542–1554. [Google Scholar] [CrossRef]
- Zhang, L.; Chen, H.; Huang, Y.; Guo, H.; Sun, H.; Ding, H.; Wang, N. Model predictive control for integrated longitudinal and lateral stability of electric vehicles with in-wheel motors. IET Control Theory Appl. 2020, 14, 2741–2751. [Google Scholar] [CrossRef]
- Chen, T.; Chen, L.; Xu, X.; Cai, Y.; Sun, X. Simultaneous path following and lateral stability control of 4WD-4WS autonomous electric vehicles with actuator saturation. Adv. Eng. Softw. 2019, 128, 46–54. [Google Scholar] [CrossRef]
- Hu, J.; Tao, J.; Xiao, F.; Niu, X.; Fu, C. An optimal torque distribution control strategy for four-wheel independent drive electric vehicles considering energy economy. IEEE Access 2019, 7, 141826–141837. [Google Scholar] [CrossRef]
- Wang, C.; Bo, H.; Zhao, W. Yaw and lateral stability control for four-wheel-independent steering and four-wheel-independent driving electric vehicle. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2020, 234, 409–422. [Google Scholar] [CrossRef]
- Jie, Y.I.; Liu, Z.W.; Zeng, W.Q. Isothermal extrusion speed curve design for porthole die of hollow aluminium profile based on PID algorithm and finite element simulations. Trans. Nonferrous Met. Soc. China 2021, 31, 1939–1950. [Google Scholar]
- Asl, R.M.; Mahdoudi, A.; Pourabdollah, E.; Klančar, G. Combined PID and LQR regulator using optimized fuzzy rules. Soft Comput. 2019, 23, 5143–5155. [Google Scholar]
- George, T.; Ganesan, V. An effective technique for tuning the time delay system with PID regulator-ant lion optimizer algorithm with ANN technique. Int. J. Comadem 2020, 23, 39–48. [Google Scholar]
- Jinbao, C.; Xiong, C.; Jingliang, Z.; Kun, H. Adaptive fuzzy immune PID control for gas generator pressure based on artificial bee colony algorithm optimization. J. Propuls. Technol. 2019, 40, 441–448. [Google Scholar]
- Chen, G.; Li, Z.; Zhang, Z.; Li, S. An improved ACO algorithm optimized fuzzy PID regulator for load frequency control in multi area interconnected power systems. IEEE Access 2020, 8, 6429–6447. [Google Scholar] [CrossRef]
- Li, Y.; Huang, X.; Liu, D.; Wang, M.; Xu, J. Hybrid energy storage system and energy distribution strategy for four-wheel independent-drive electric vehicles. J. Clean. Prod. 2019, 220, 756–770. [Google Scholar] [CrossRef]
- Ding, X.; Wang, Z.; Zhang, L.; Wang, C. Longitudinal vehicle speed estimation for four-wheel-independently-actuated electric vehicles based on multi-sensor fusion. IEEE Trans. Veh. Technol. 2020, 69, 12797–12806. [Google Scholar] [CrossRef]
- Peng, H.; Wang, W.; Xiang, C.; Li, L.; Wang, X. Torque coordinated control of four in-wheel motor independent-drive vehicles with consideration of the safety and economy. IEEE Trans. Veh. Technol. 2019, 68, 9604–9618. [Google Scholar] [CrossRef]
- Song, Y.; Shu, H.; Chen, X.; Luo, S. Direct-yaw-moment control of four-wheel-drive electrical vehicles based on lateral tyre-road forces and sideslip angle observer. IET Intell. Transp. Syst. 2019, 13, 303–312. [Google Scholar] [CrossRef]
- Guo, L.; Ge, P.; Sun, D. Torque distribution algorithm for steadiness control of electric vehicle driven by four in-wheel motors under emergency conditions. IEEE Access 2019, 7, 104737–104748. [Google Scholar] [CrossRef]
- Li, C.; Xie, Y.F.; Wang, G.; Liu, S.Q.; Kuang, B.; Jing, H. Experimental study of electric vehicle yaw rate tracking control based on differential steering. J. Adv. Transp. 2021, 2021, 6668091. [Google Scholar] [CrossRef]
- Sun, H.; Wang, H.; Zhao, X. Line braking torque allocation scheme for minimal braking loss of four-wheel-drive electric vehicles. IEEE Trans. Veh. Technol. 2019, 68, 180–192. [Google Scholar] [CrossRef]
- Le, V.Q.; Cuong, B.V.; Liem, N.V.; Long, L.X.; Thanh Dung, P.T. Effect of in-wheel motor suspension system on electric vehicle ride comfort. Vibroeng. Procedia 2019, 29, 148–152. [Google Scholar]
- Wang, Y.; Fu, P. Integration performance statistics of green suppliers based on fuzzy mathematics and BP neural network. J. Intell. Fuzzy Syst. 2021, 40, 2083–2094. [Google Scholar] [CrossRef]
- Xi, H.; Li, Z.; Han, J.; Shen, D.; Li, N.; Long, Y.; Chen, Z.; Xu, L.; Zhang, X.; Niu, D.; et al. Evaluating the capability of municipal solid waste separation in China based on AHP-EWM and BP neural network. Waste Manag. 2022, 139, 208–216. [Google Scholar] [CrossRef]
- Chen, Z.; Yuan, X.; Yuan, Y.; Lei, X.; Zhang, B. Parameter estimation of fuzzy sliding mode regulator for hydraulic turbine regulating system based on HICA algorithm. Renew. Energy 2019, 133, 551–565. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Input vector length | 3 |
| Output vector length | 3 |
| Number of input layers | 3 |
| Number of input layers | 3 |
| Number of neurons in hidden layer | 5 |
| Hidden layer vector field | 5 |
| Accelerated pace | 1.5 |
| Inertia threshold | 0.8 |
| Maximum number of updates | 50 |
| Algorithm | Attenuation Rate | Phase Margin | Gain Margin |
|---|---|---|---|
| Traditional PID | 32.7% | −102.9° | ±89.4 N·m |
| ACO-PID | 63.8% | 65.4° | ±53.1 N·m |
| Fuzzy control | 56.3% | 78.3° | ±60.7 N·m |
| Proposed algorithm | 86.9% | 45.7° | ±39.6 N·m |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Song, D.; Ji, H.; Li, K. Swing Steadiness Regulation of Electric Vehicles with Improved Neural Network PID Algorithm. Processes 2022, 10, 2106. https://doi.org/10.3390/pr10102106
Song D, Ji H, Li K. Swing Steadiness Regulation of Electric Vehicles with Improved Neural Network PID Algorithm. Processes. 2022; 10(10):2106. https://doi.org/10.3390/pr10102106
Chicago/Turabian StyleSong, Dongfang, Hong Ji, and Kang Li. 2022. "Swing Steadiness Regulation of Electric Vehicles with Improved Neural Network PID Algorithm" Processes 10, no. 10: 2106. https://doi.org/10.3390/pr10102106
APA StyleSong, D., Ji, H., & Li, K. (2022). Swing Steadiness Regulation of Electric Vehicles with Improved Neural Network PID Algorithm. Processes, 10(10), 2106. https://doi.org/10.3390/pr10102106