
Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System





Abstract
:1. Introduction
- -
- The paper formulates an effective predictive voltage control (PVC) approach which overcomes the shortages present in previous DFIG control schemes.
- -
- The paper presents a comprehensive performance analysis for the DFIG using the formulated PVC scheme and other control techniques under different operating conditions.
- -
- The paper introduces a detailed description for the presented control algorithms in order to visualize the base principle of each method, showing when it works properly and when it fails.
- -
- The obtained results reveal and confirm the superiority of the formulated PVC over the other control schemes in terms of the fast dynamic response, simplicity, and reduced ripples and computational burdens.
- -
- Compared with recent control schemes that adopt an equivalent operating theory, the proposed PVC proves its enhanced robustness against parameter variation.
- -
- The designed PVC scheme can be used with other machine configurations after considering the structure and operation theory of each type.
2. Mathematical Model of DFIG
3. Control Techniques of DFIG
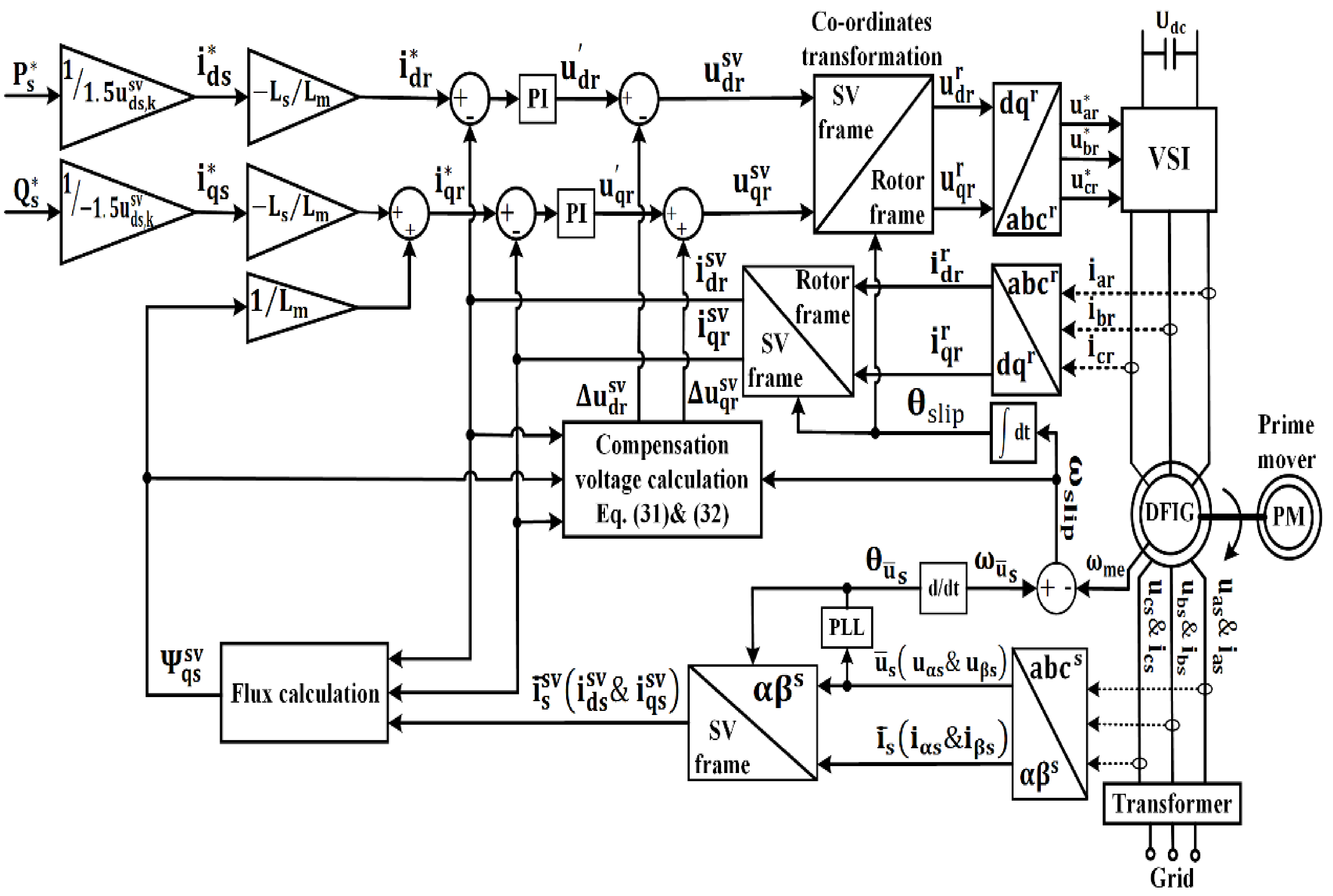
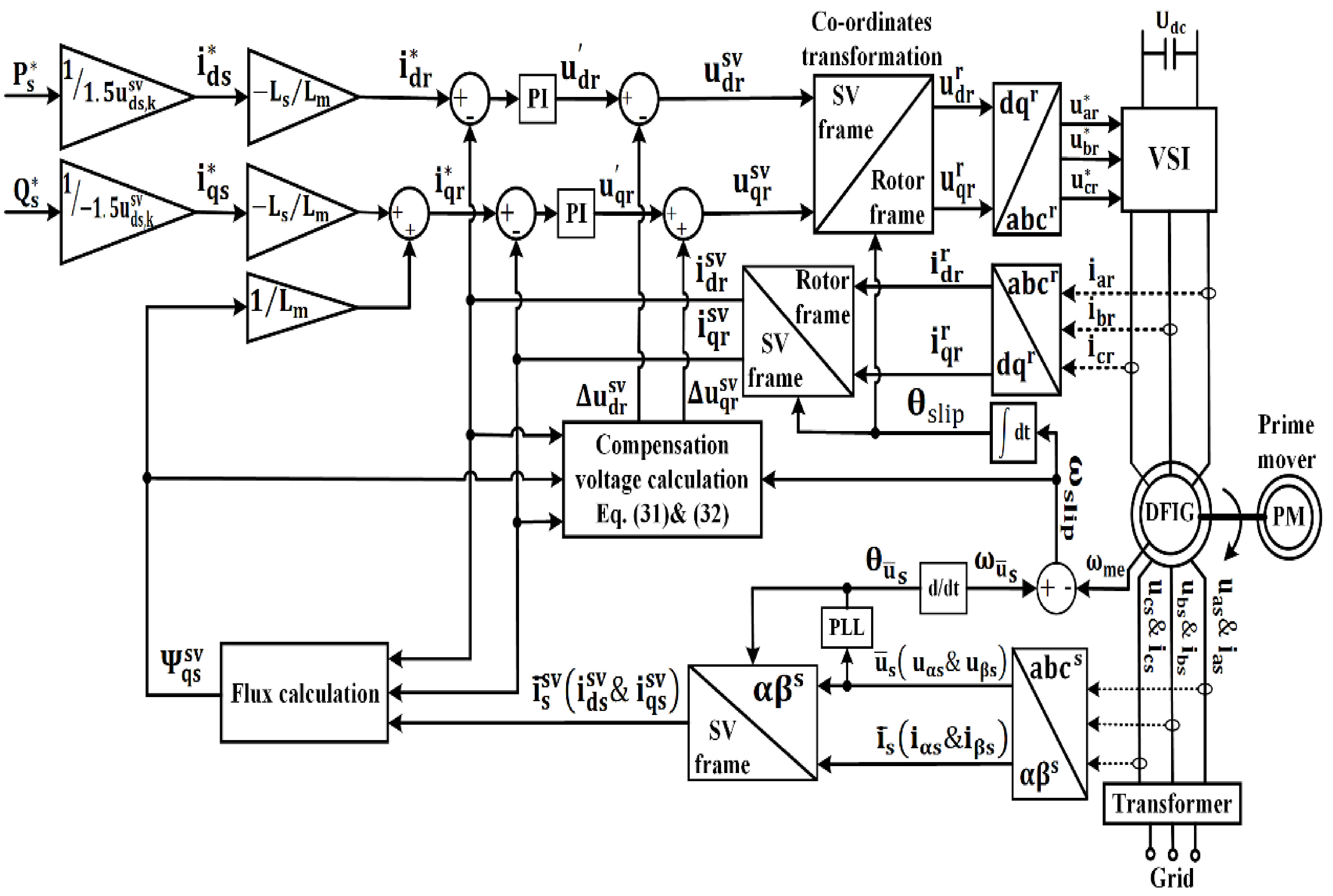
3.1. SVOC Technique
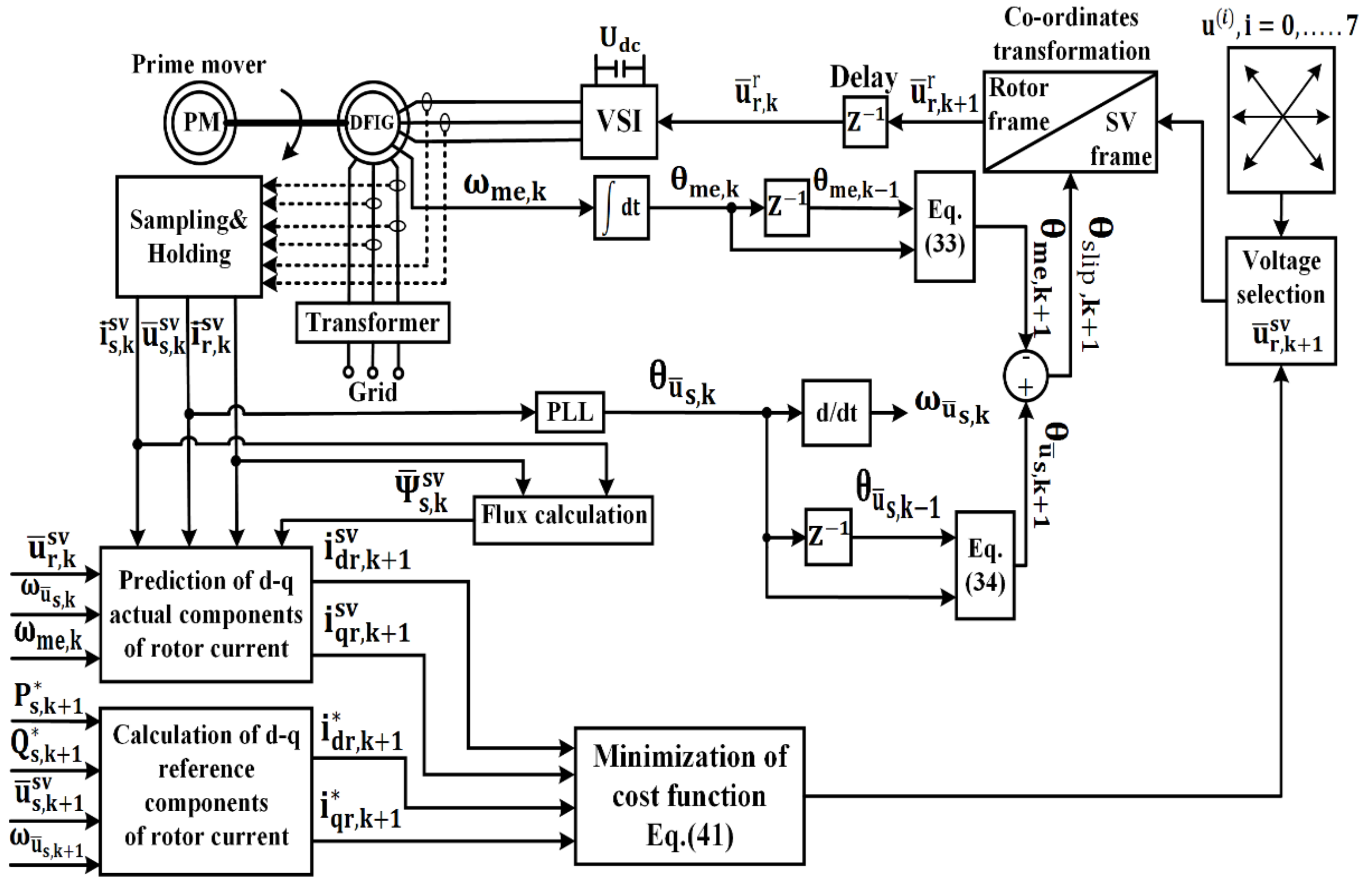
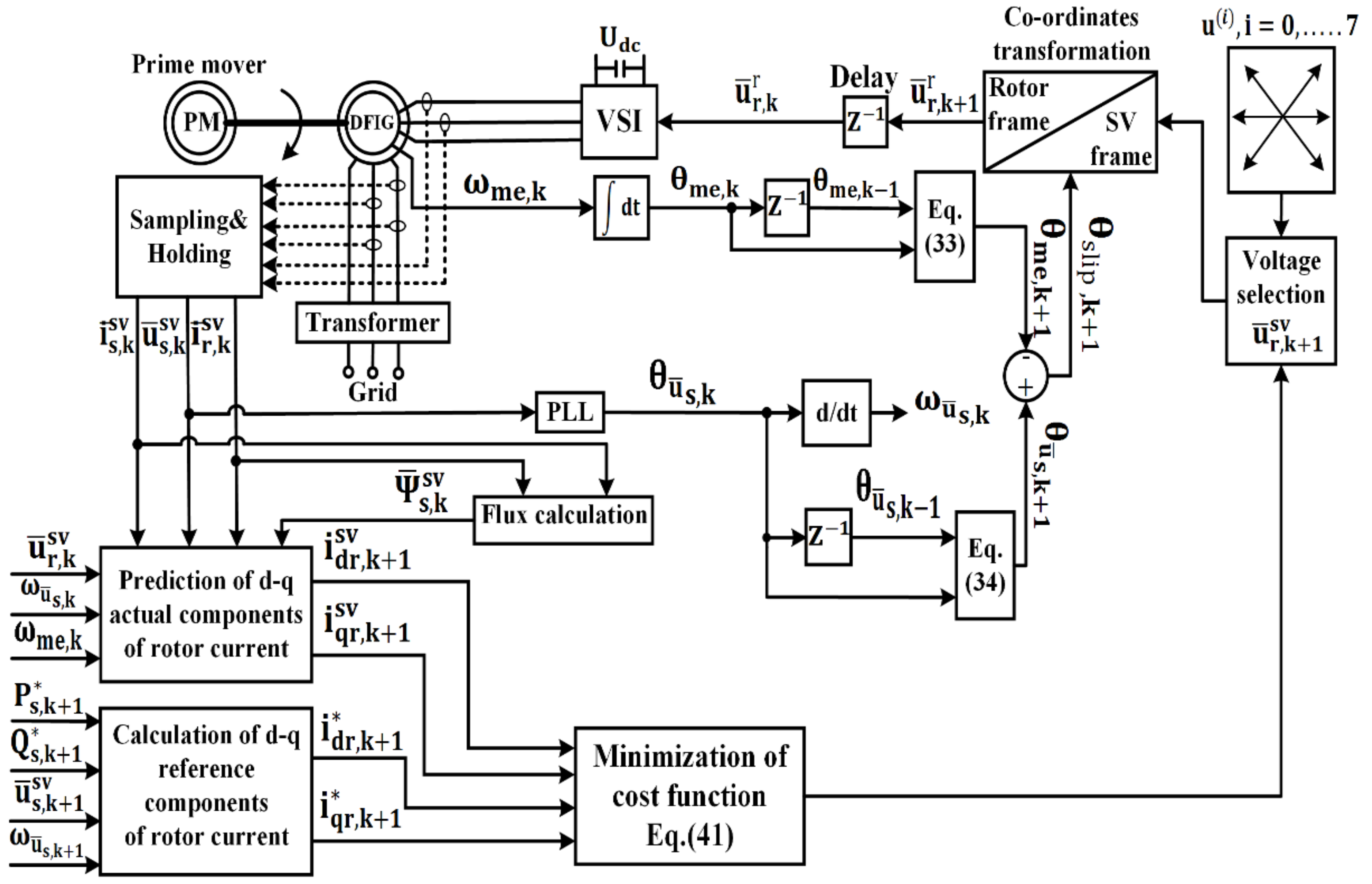
3.2. MPCC Technique
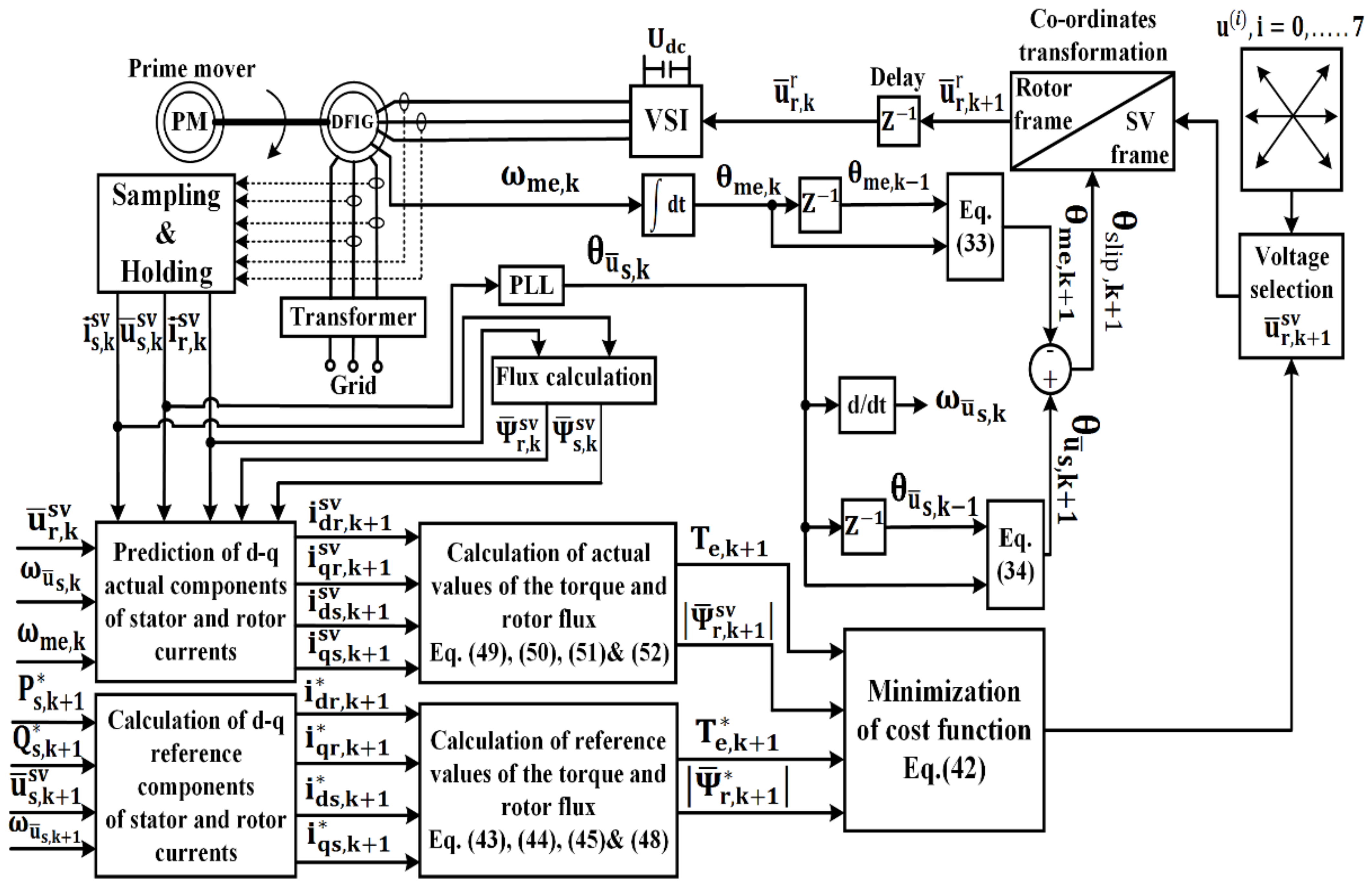
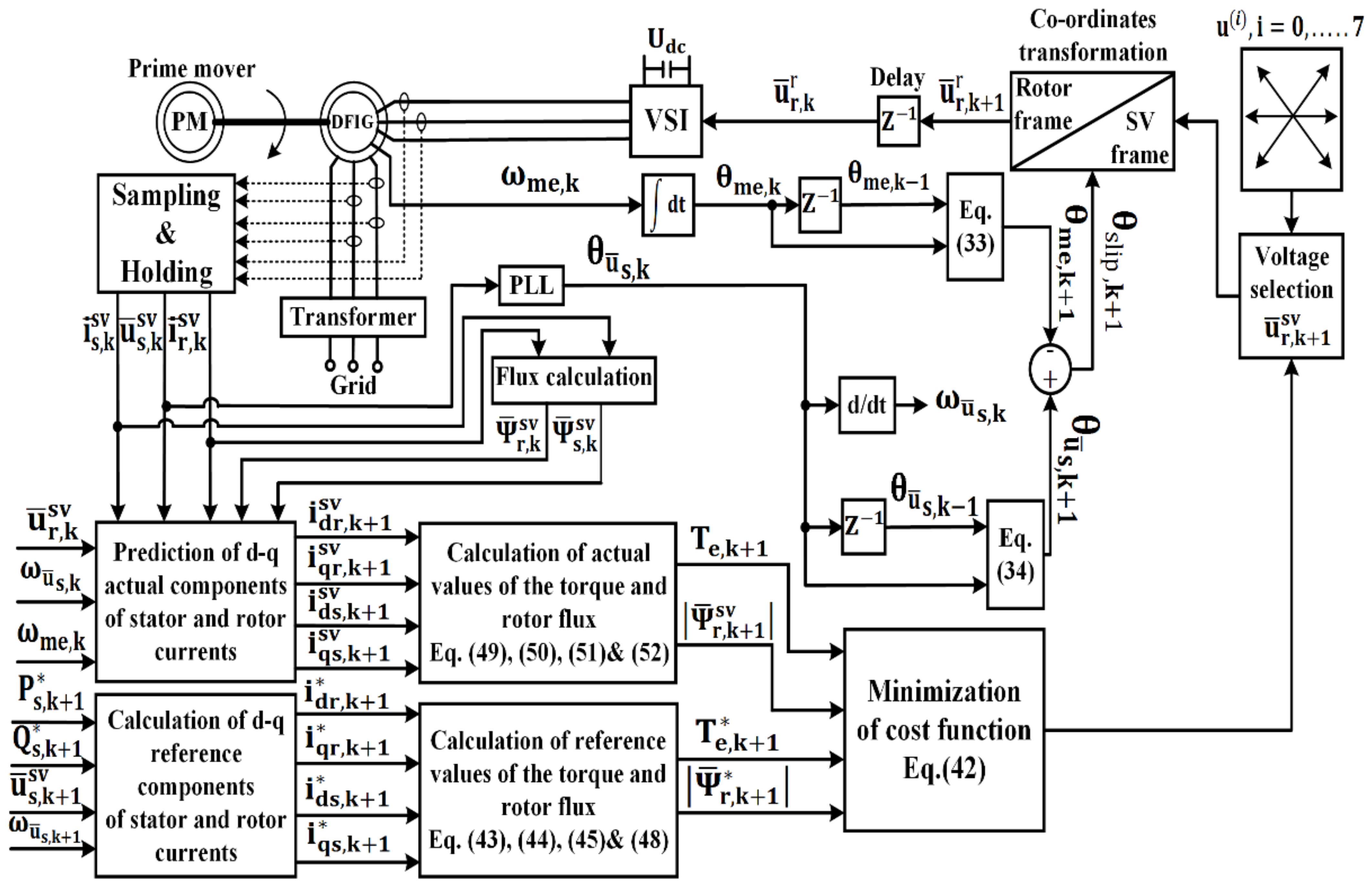
3.3. MPDTC Technique
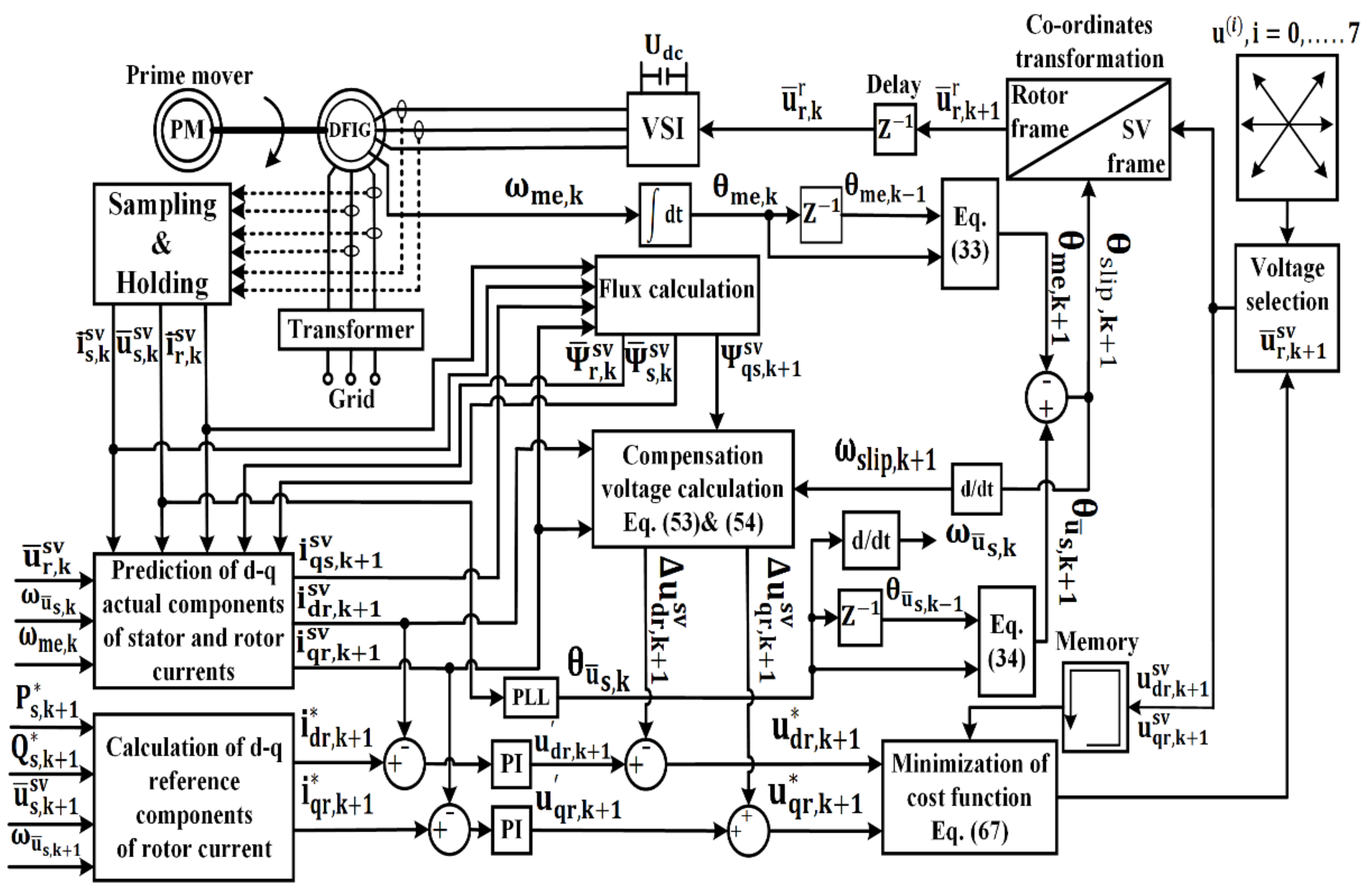
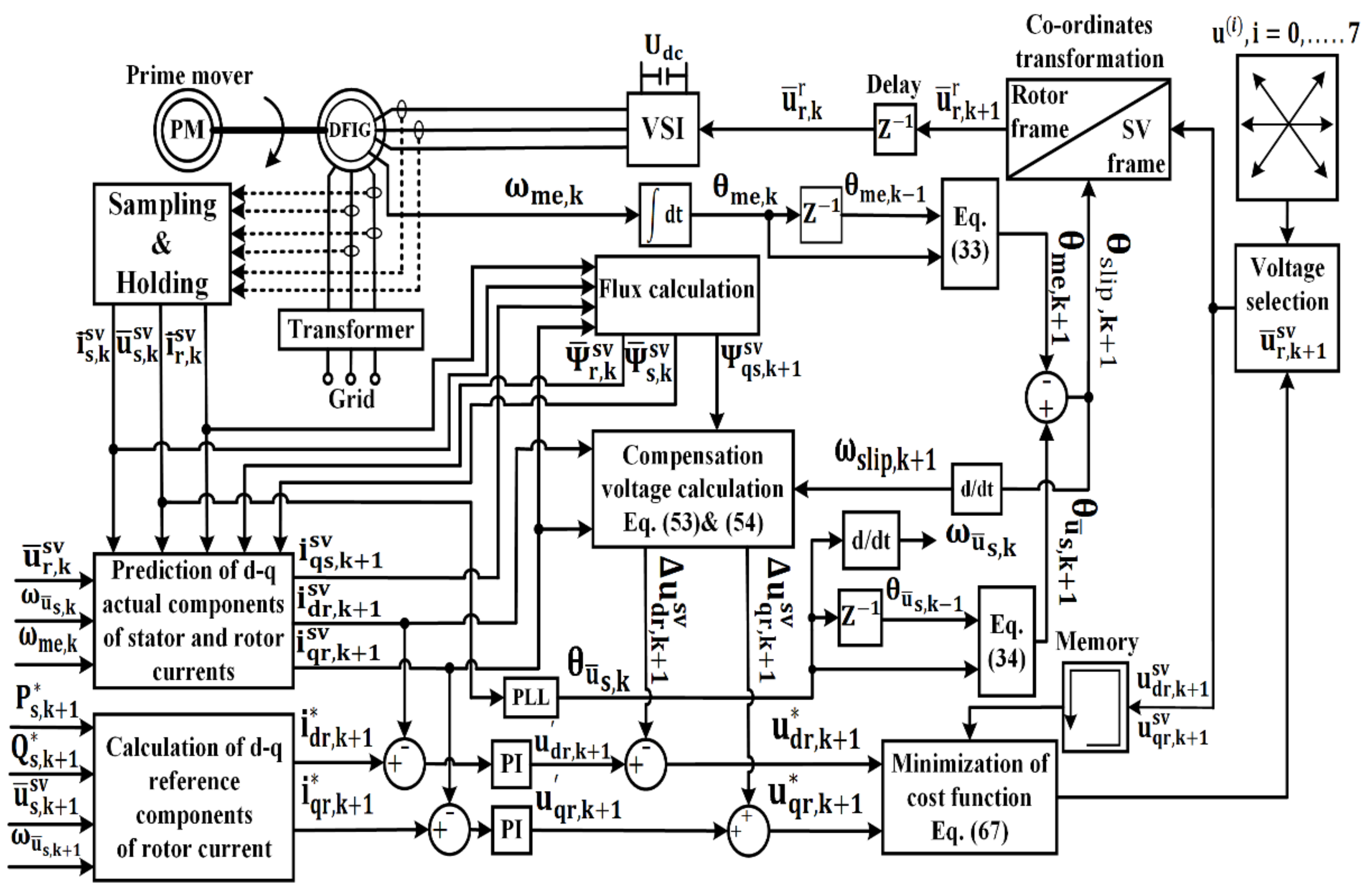
3.4. Proposed PVC Technique
4. Test Results
4.1. Testing with SVOC Technique
4.2. Testing with MPCC Technique
4.3. Testing with MPDTC Technique
4.4. Testing with Proposed PVC
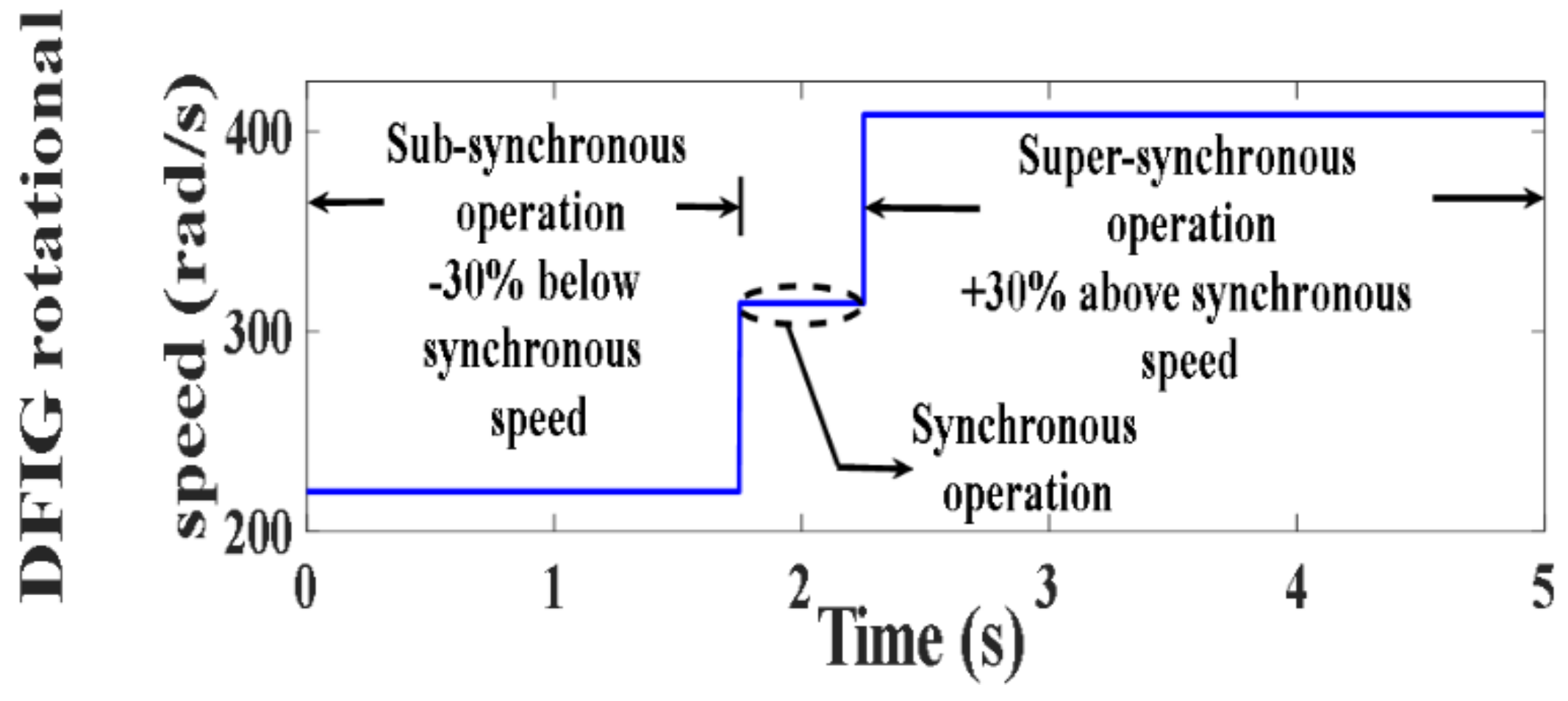
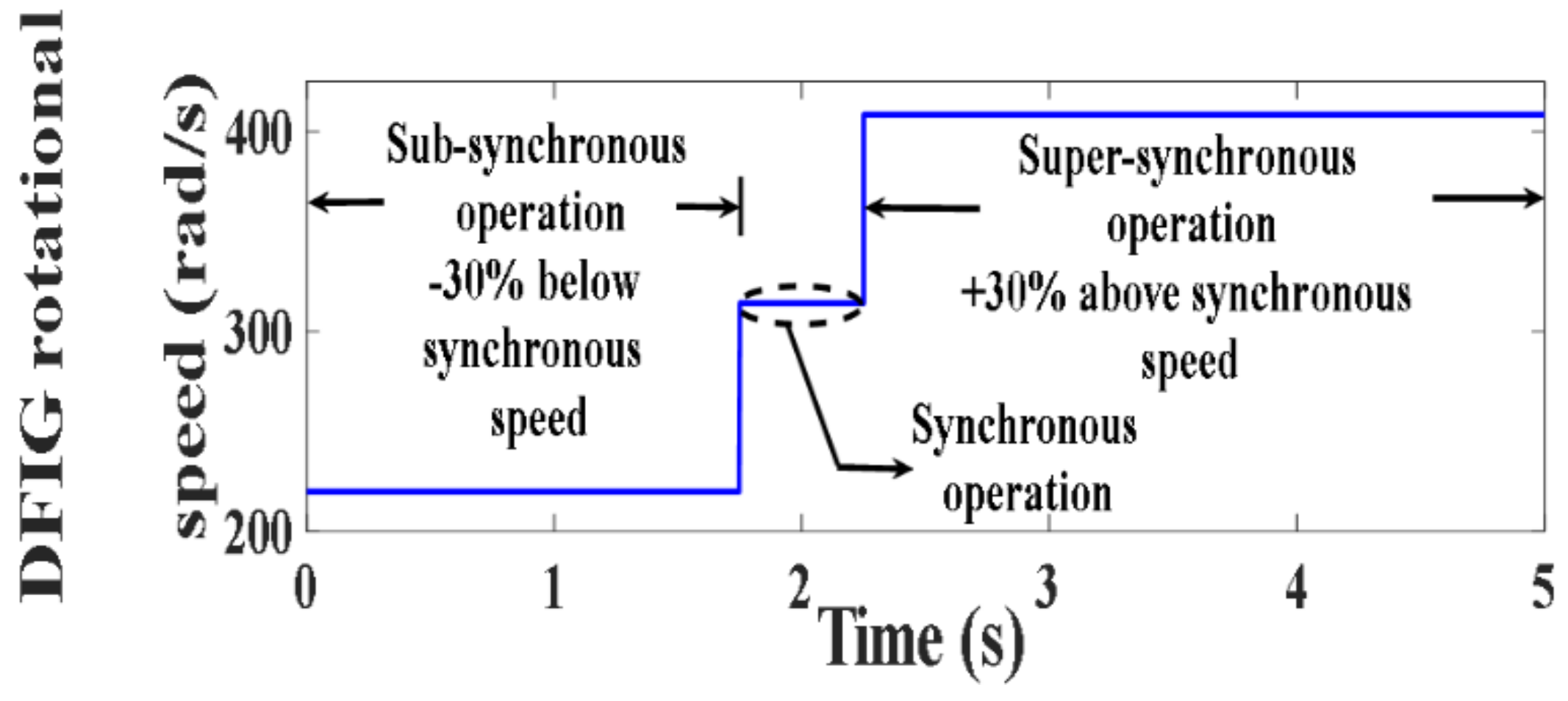
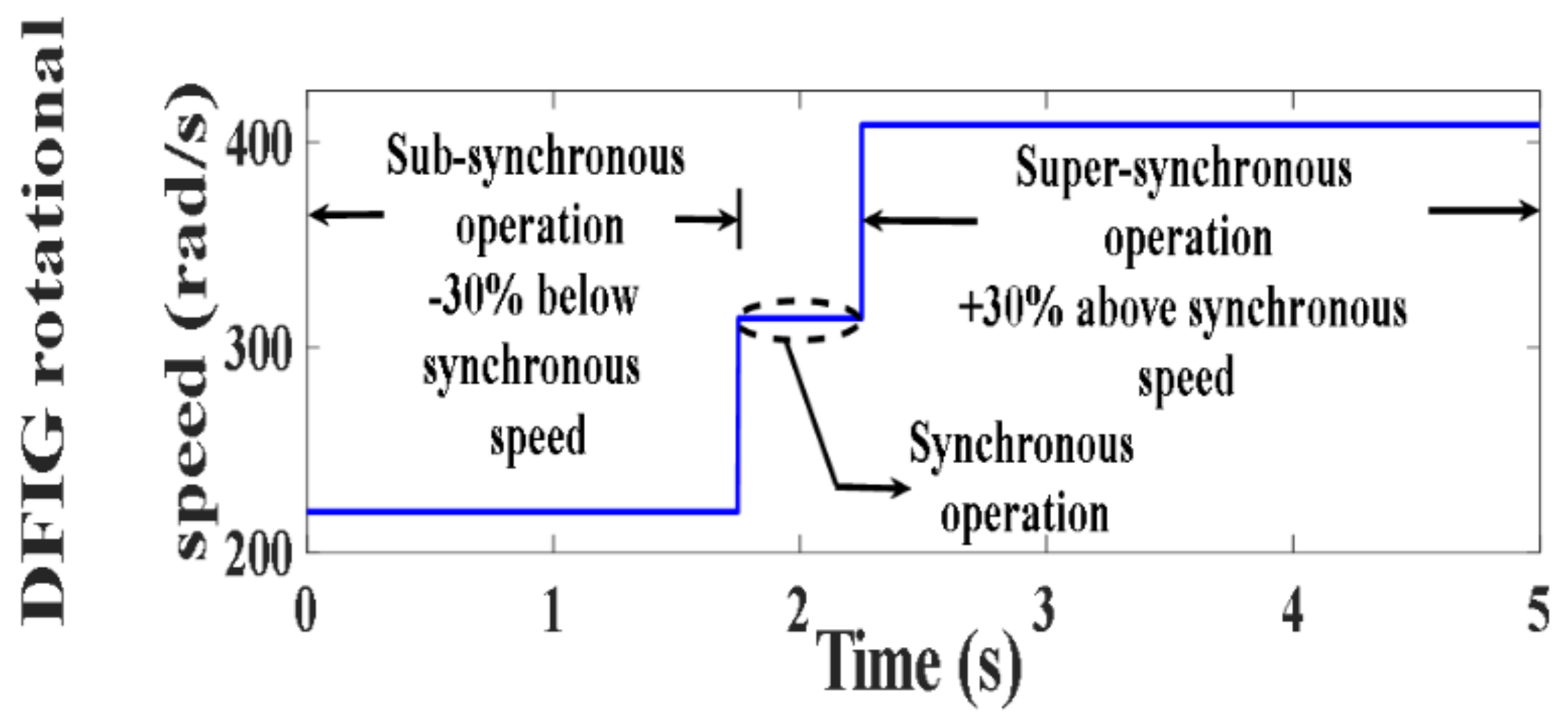
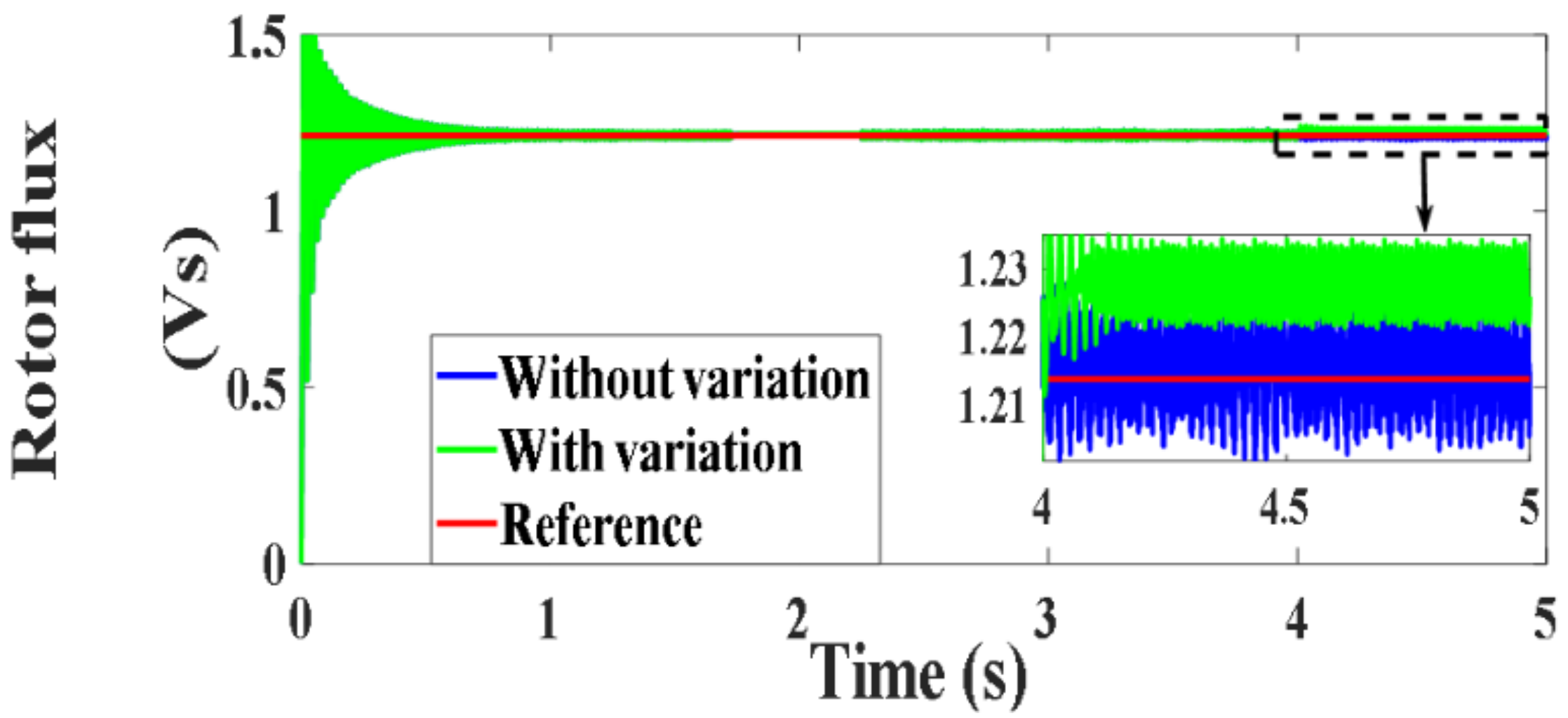
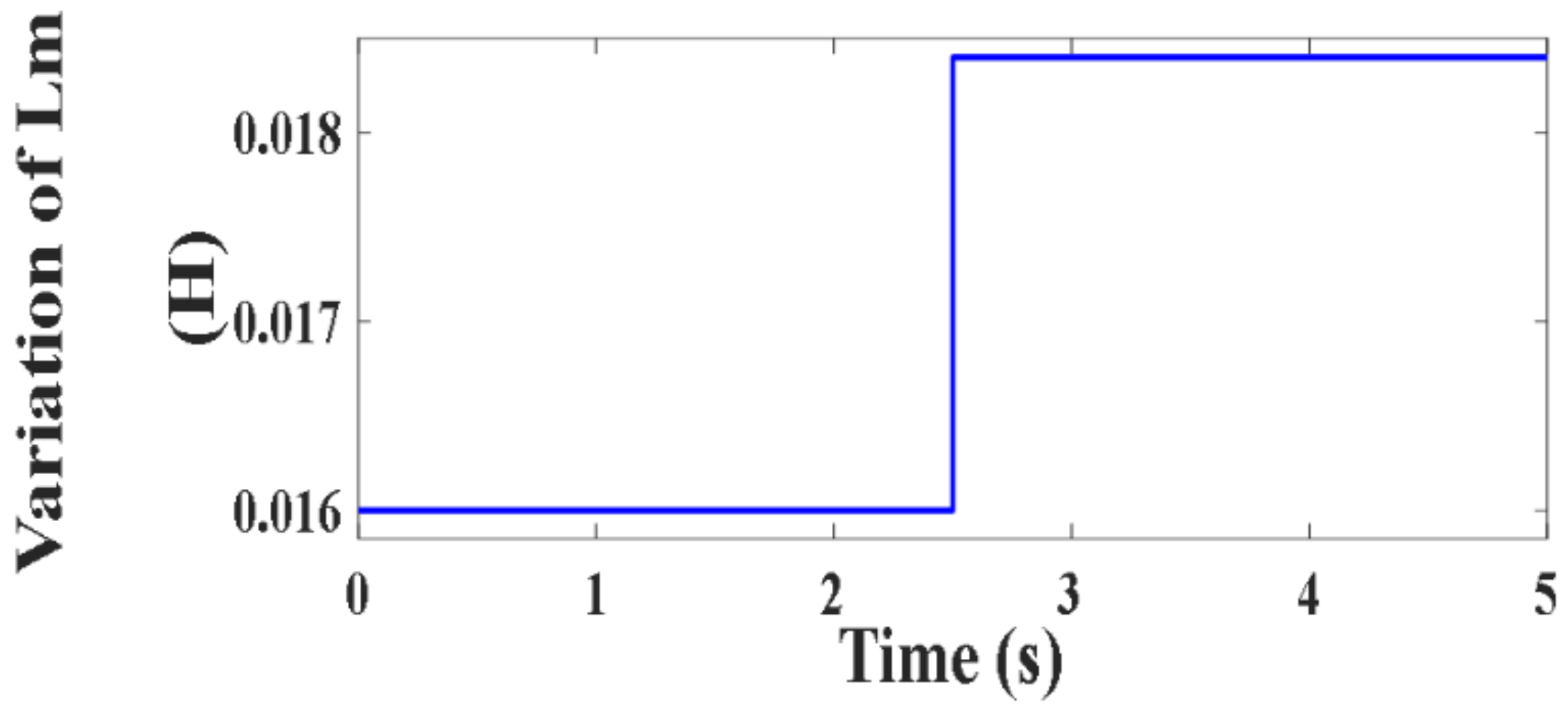
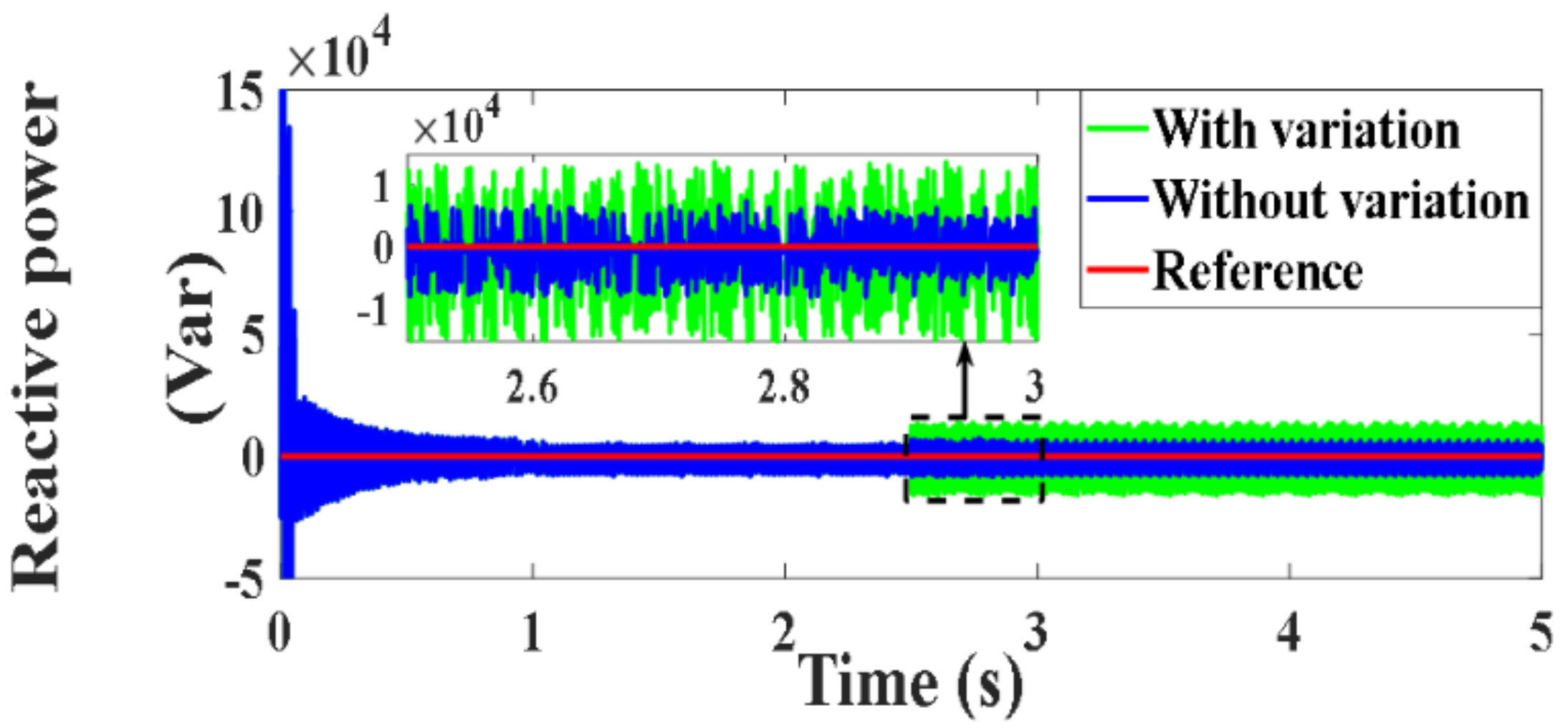
4.5. Testing under Proposed PVC with Parameter Variation
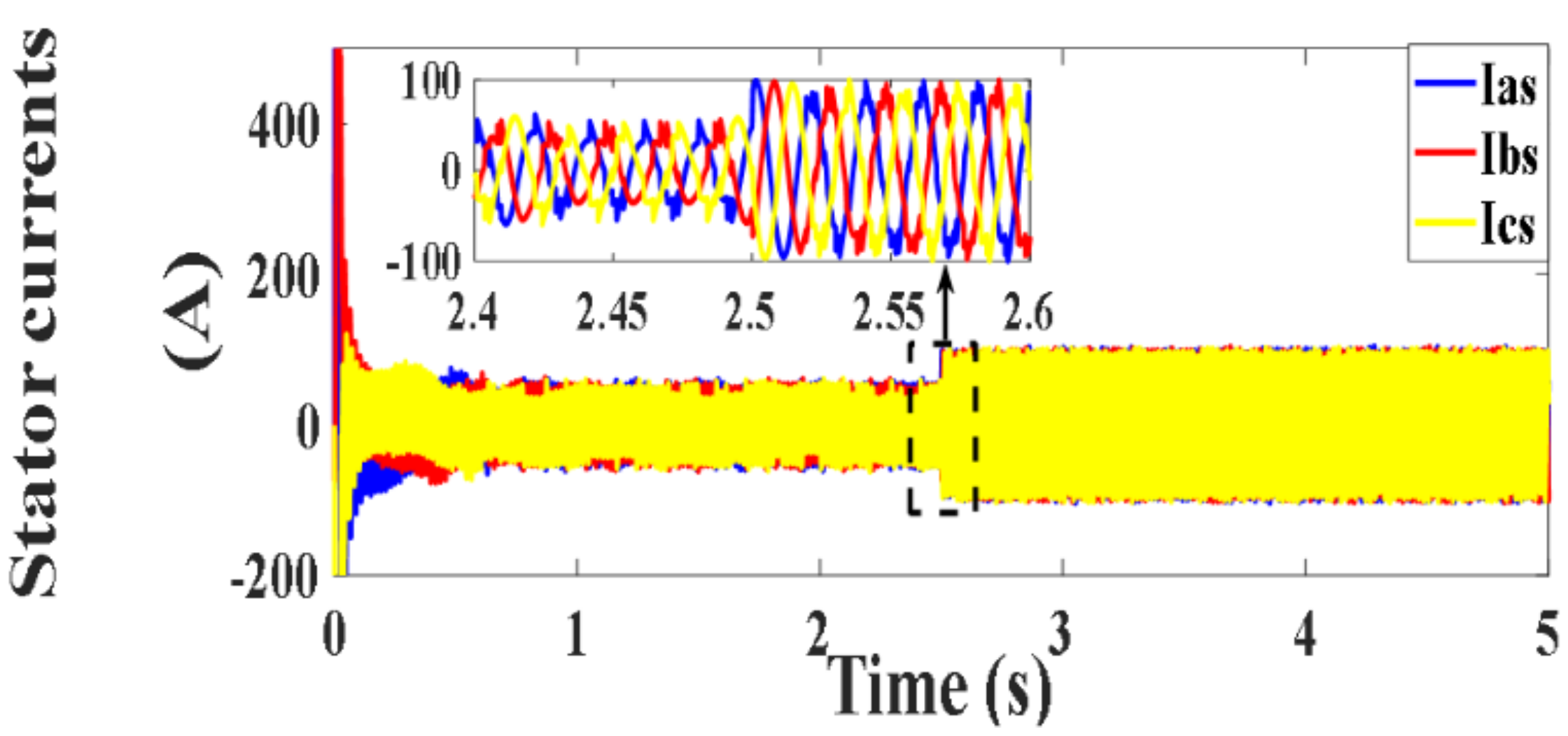
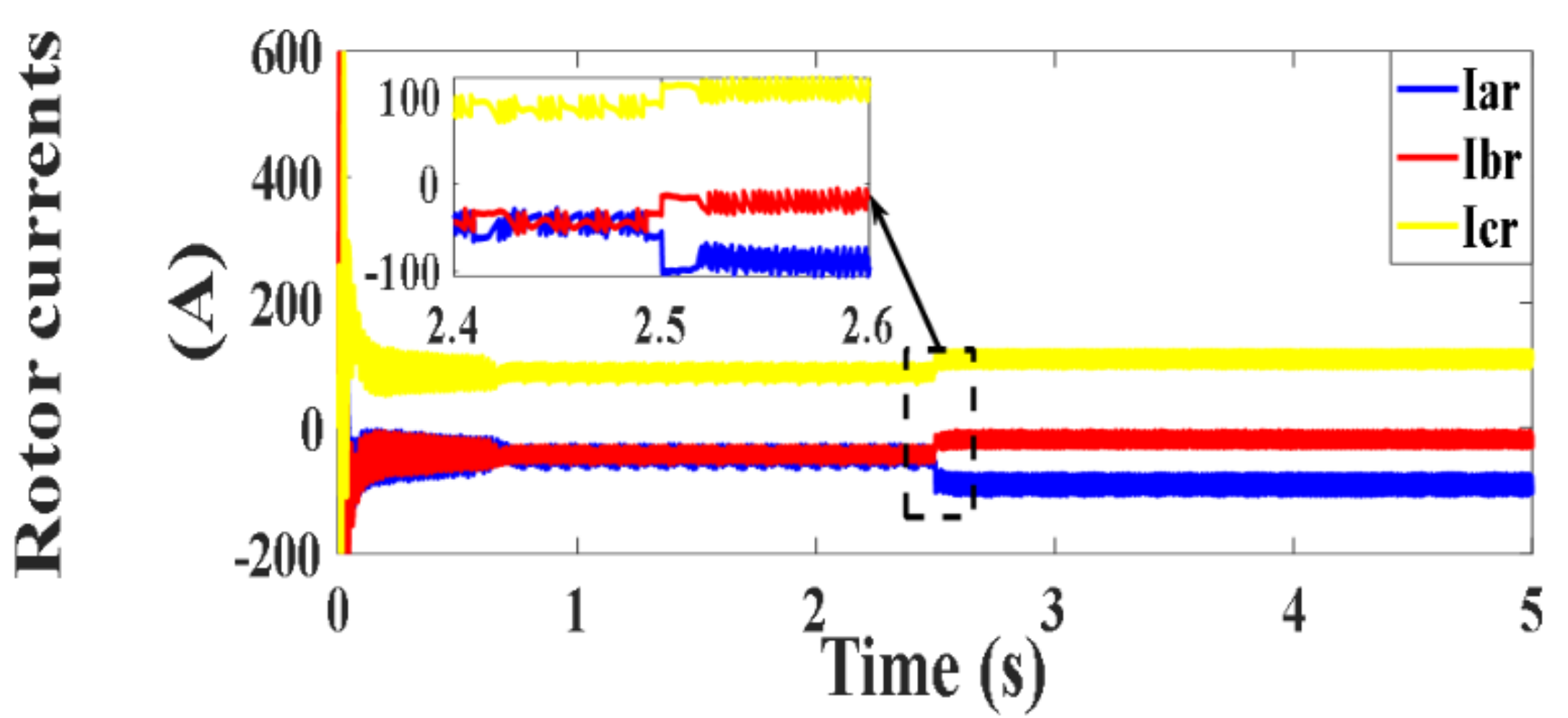
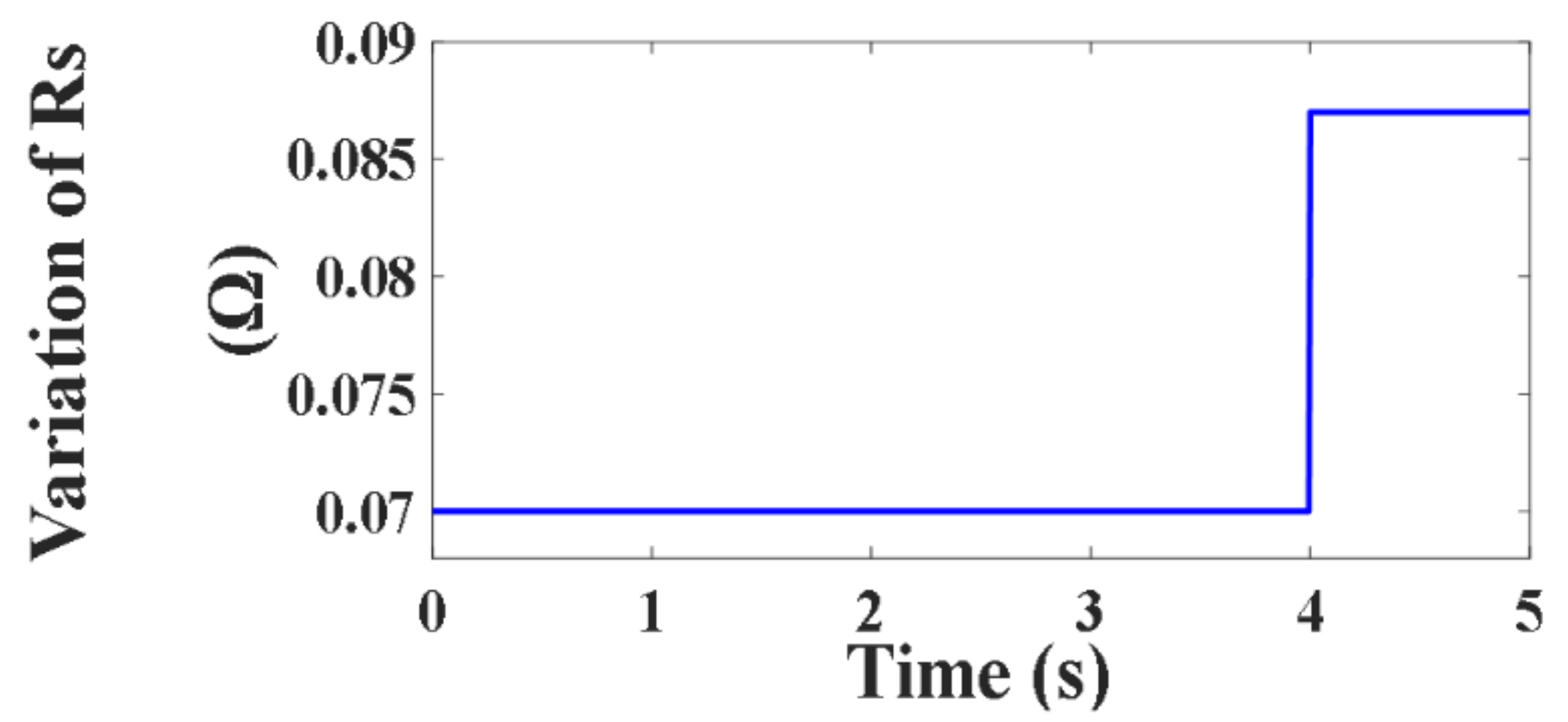
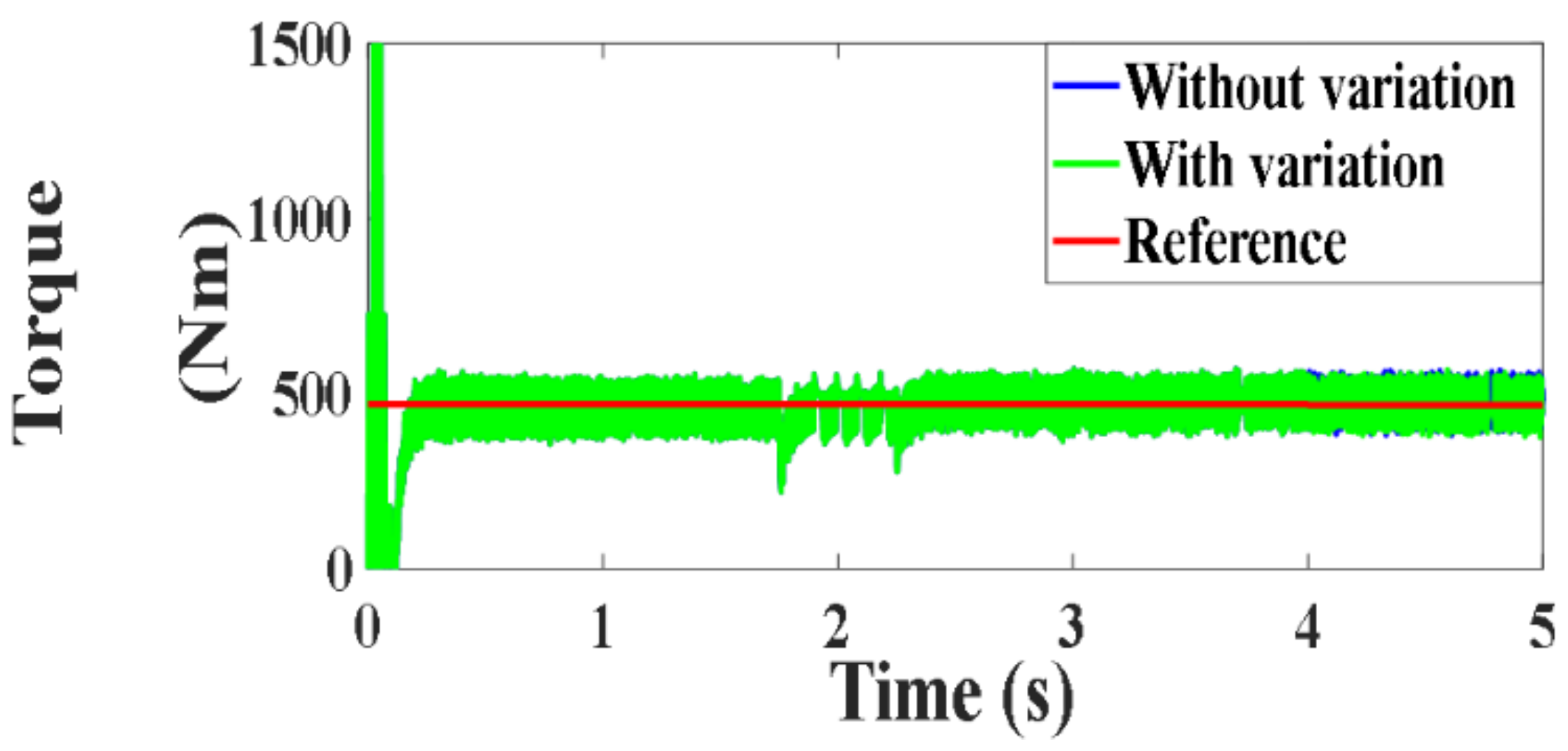
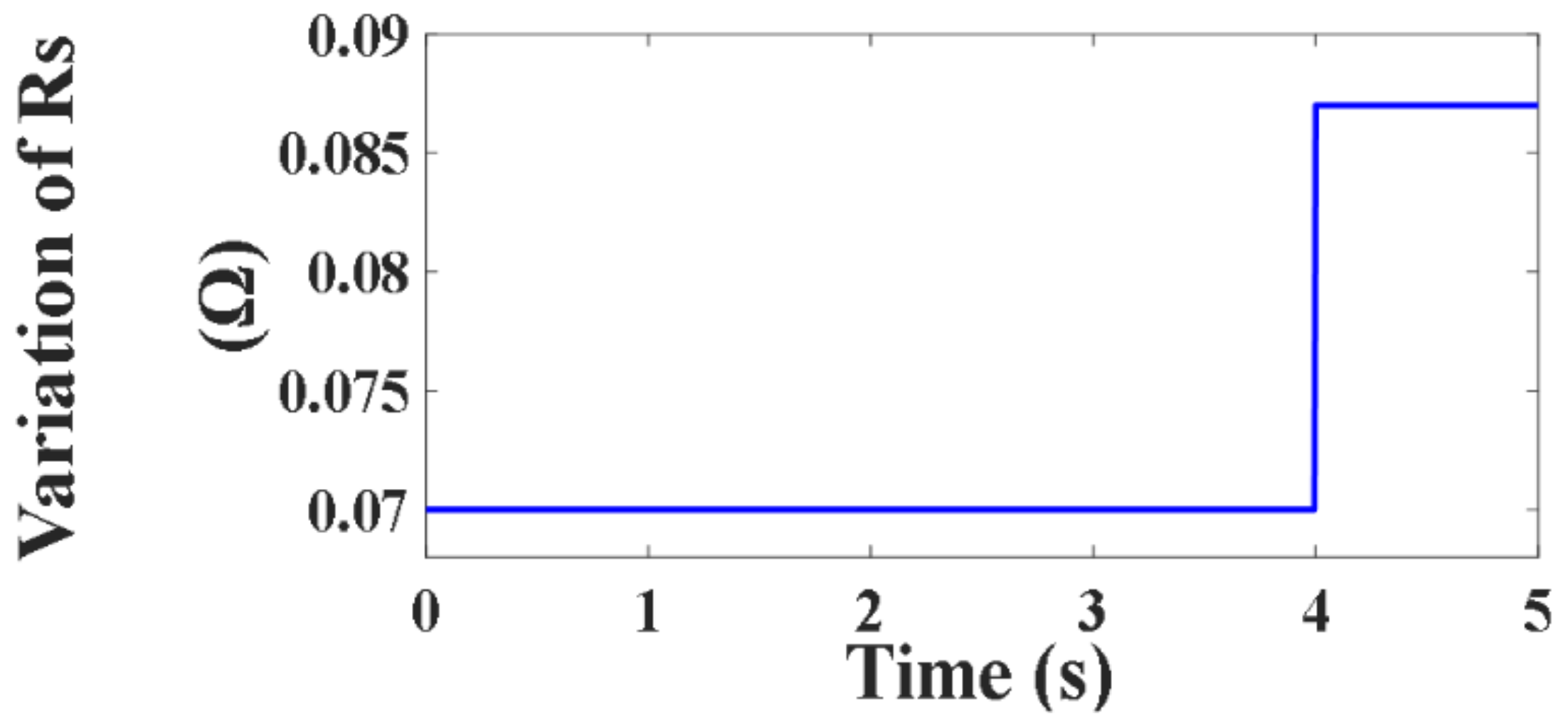
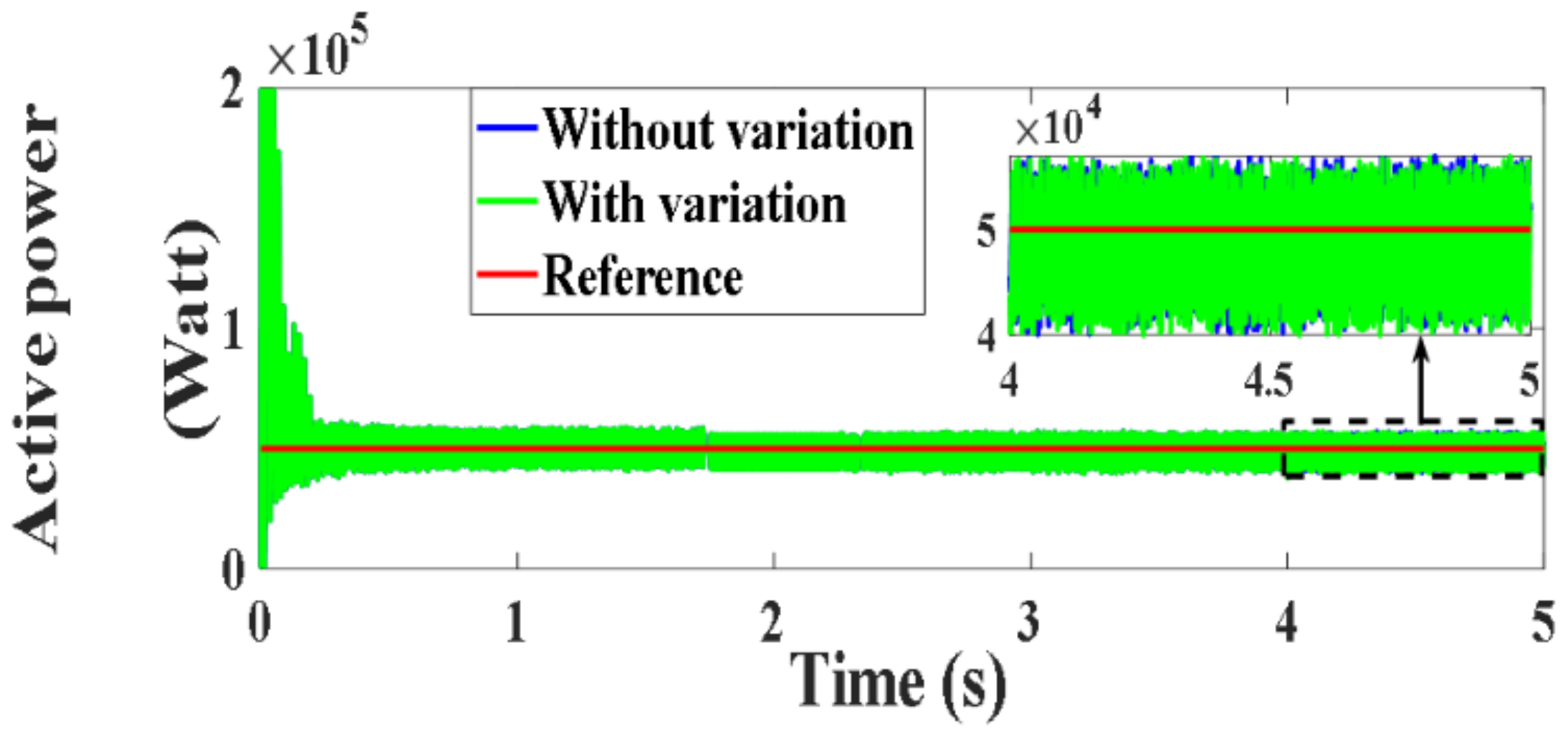
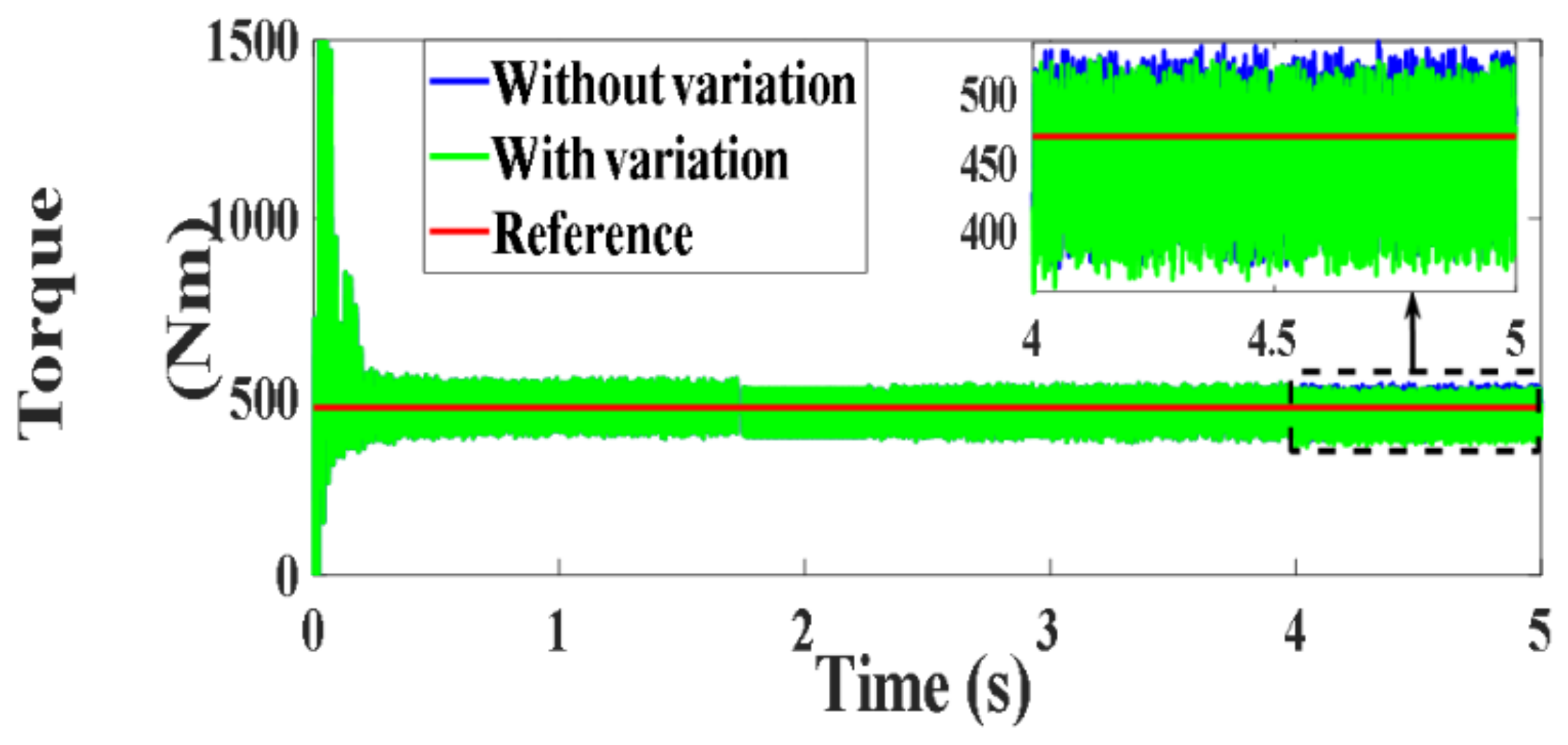
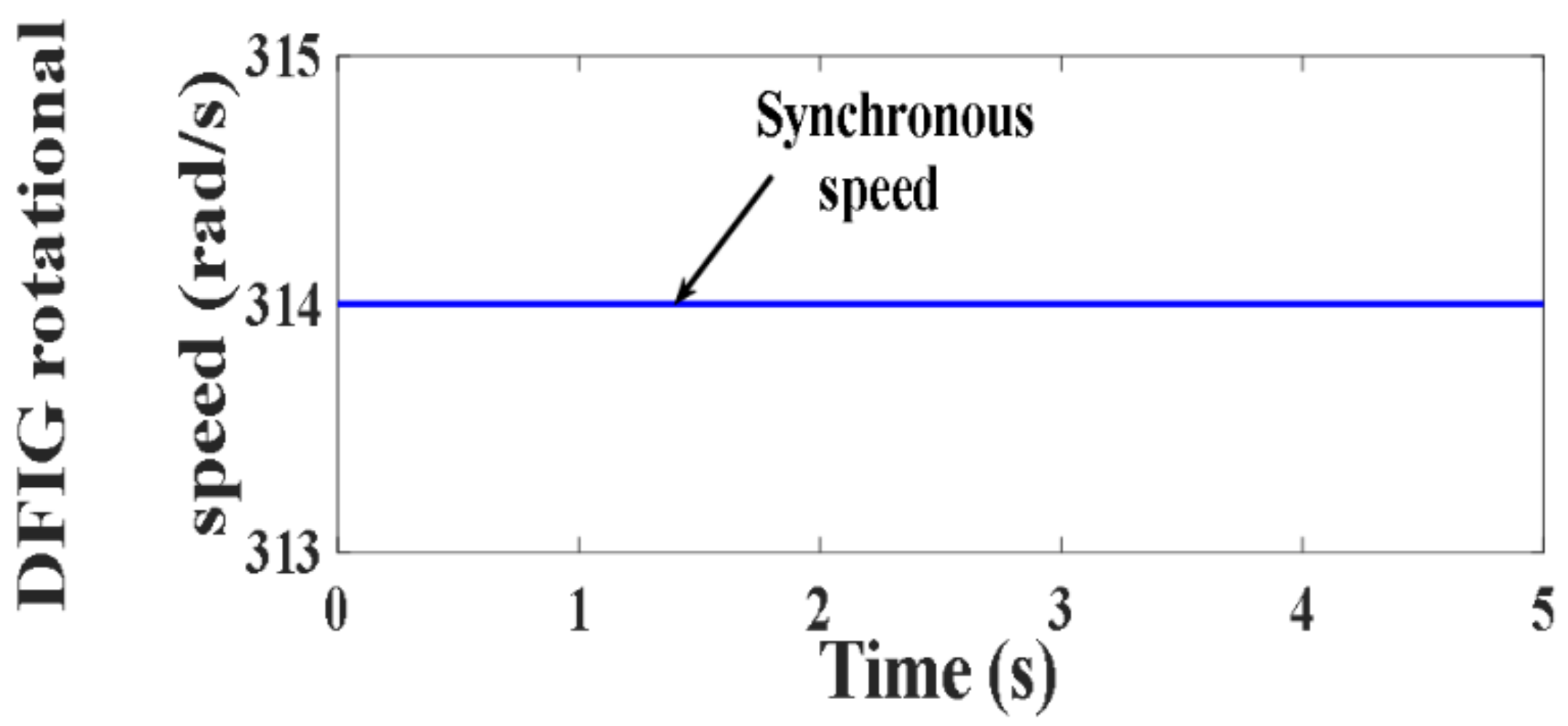
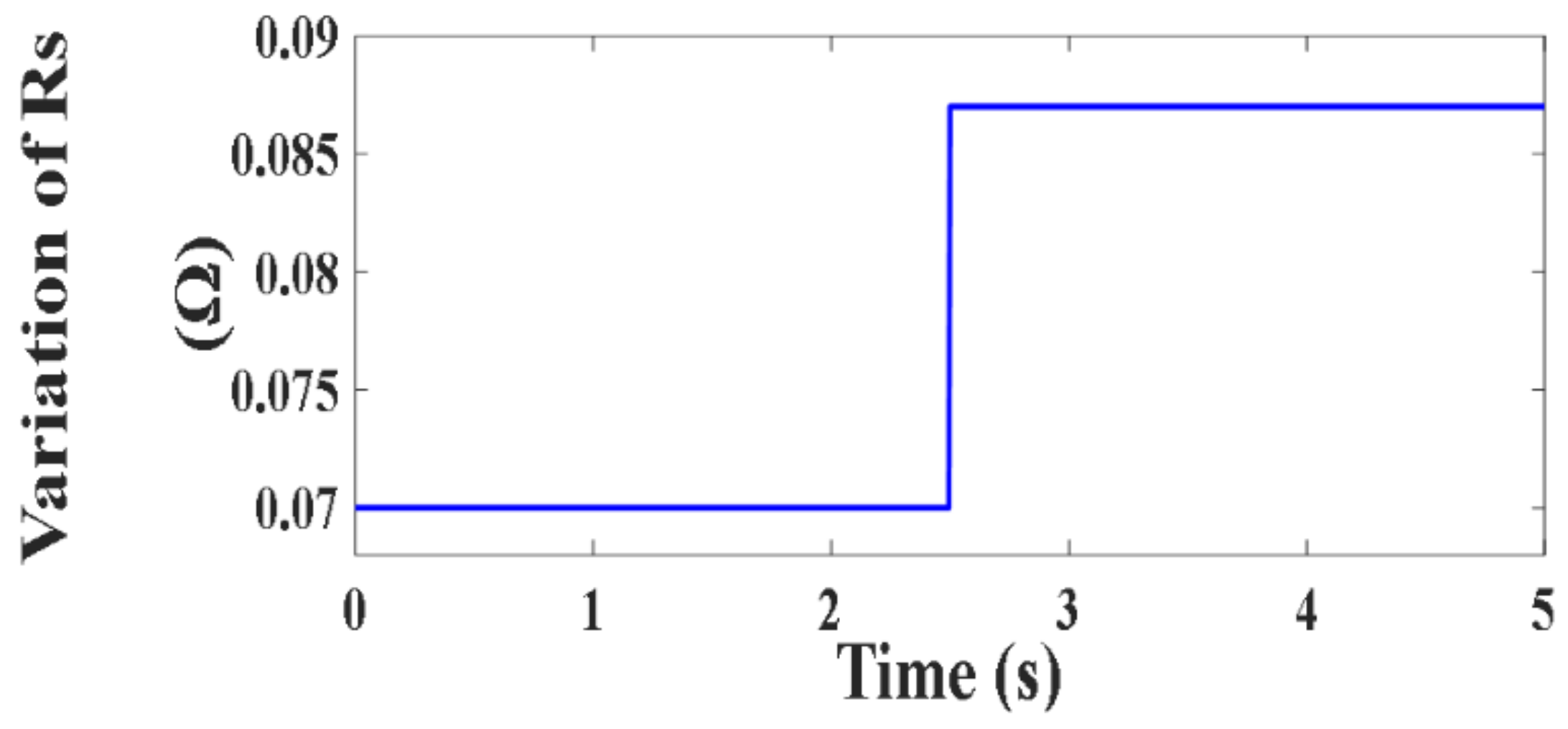
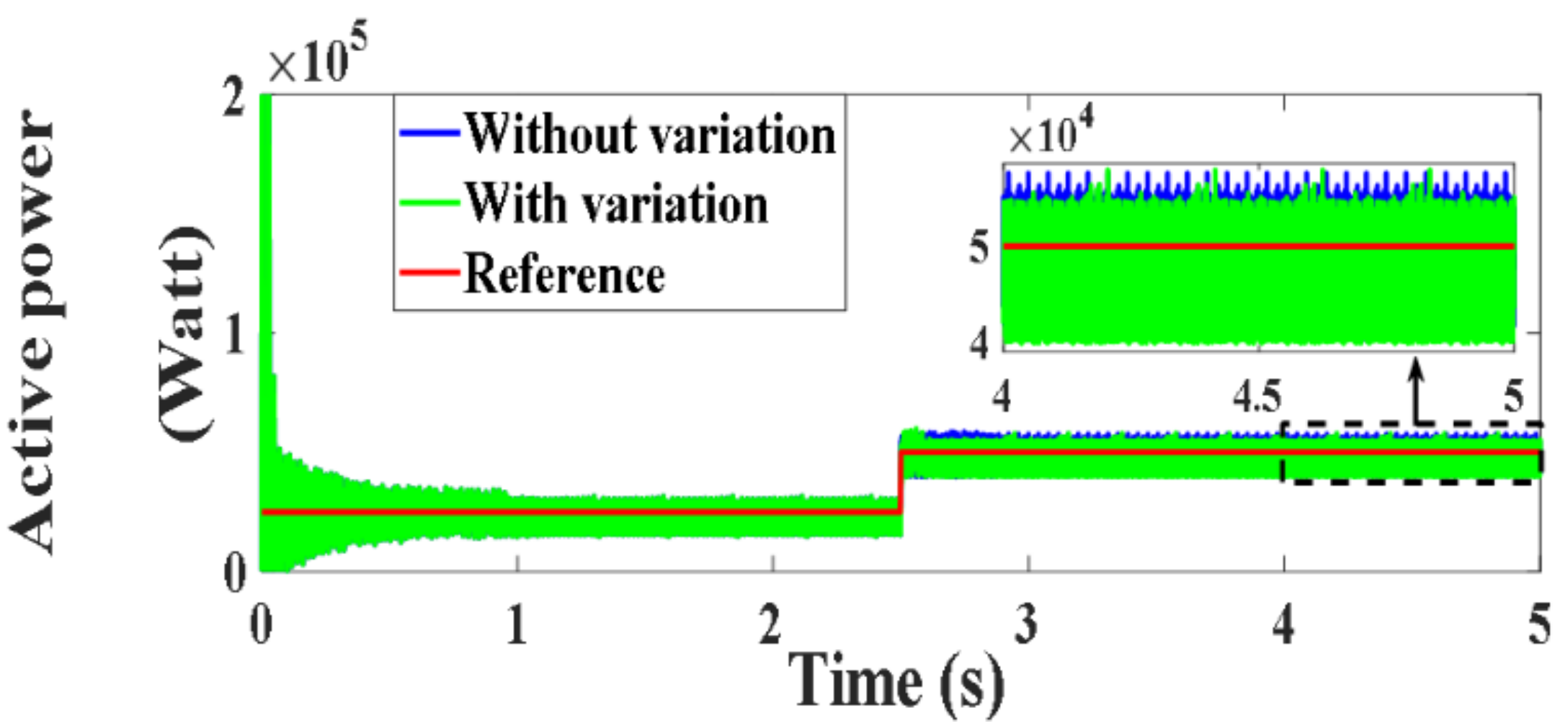
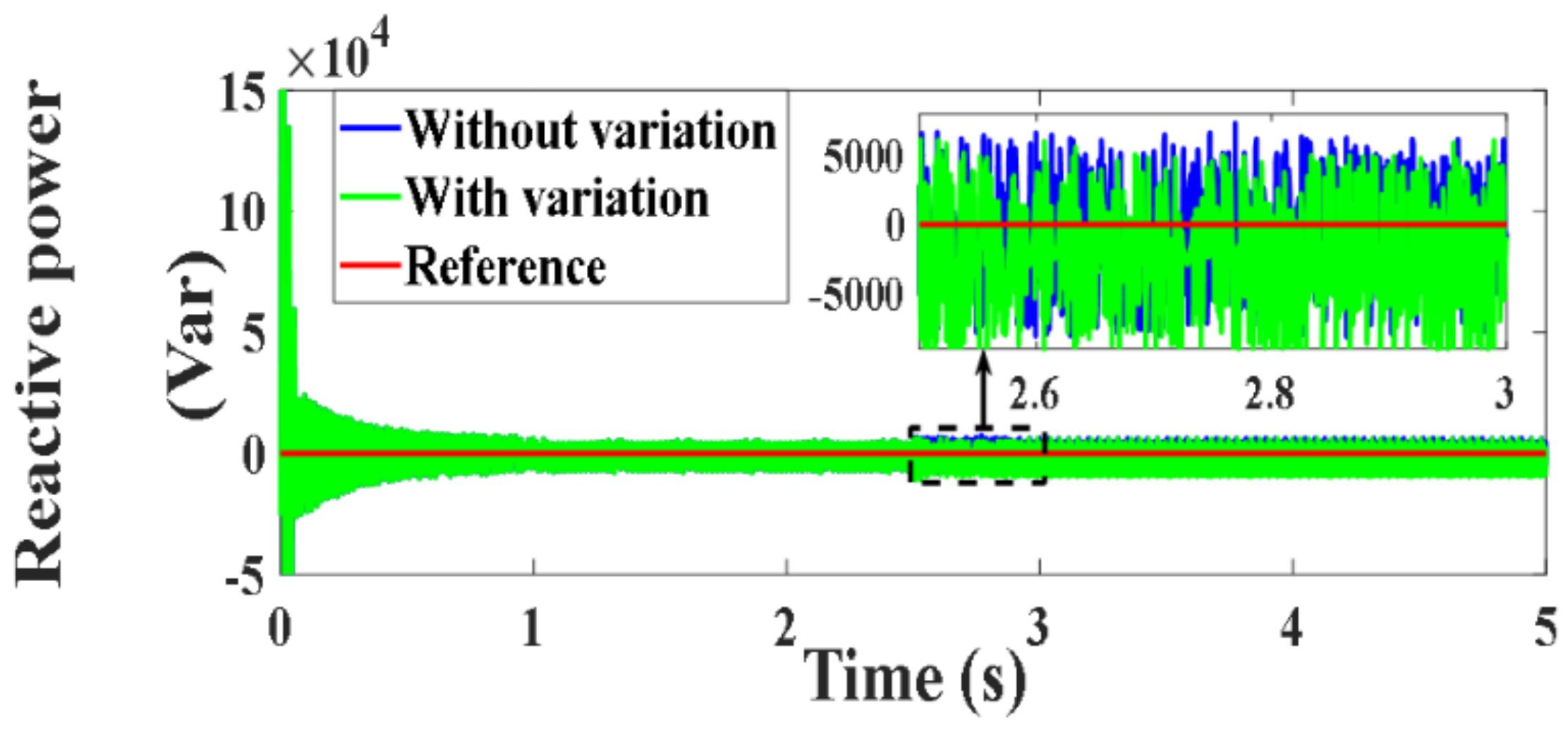
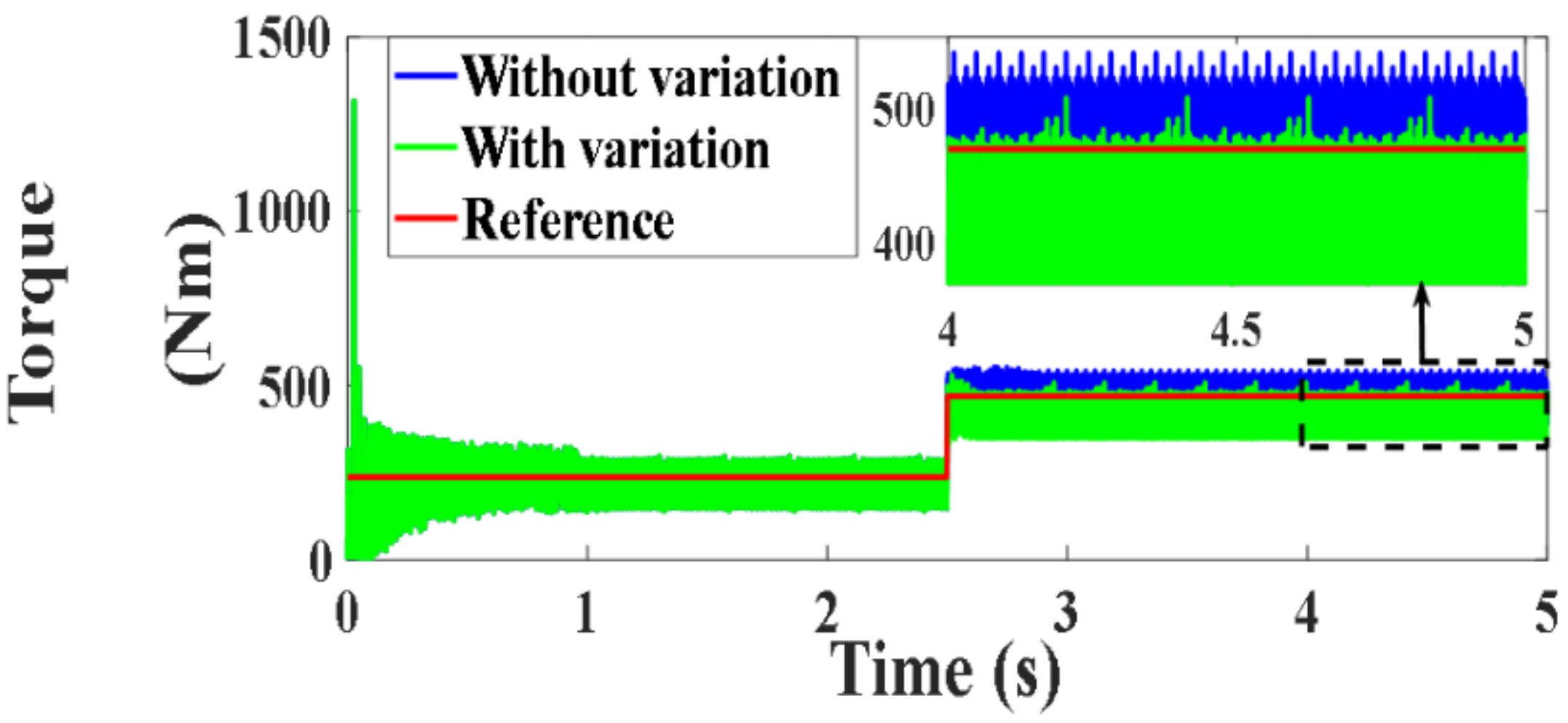
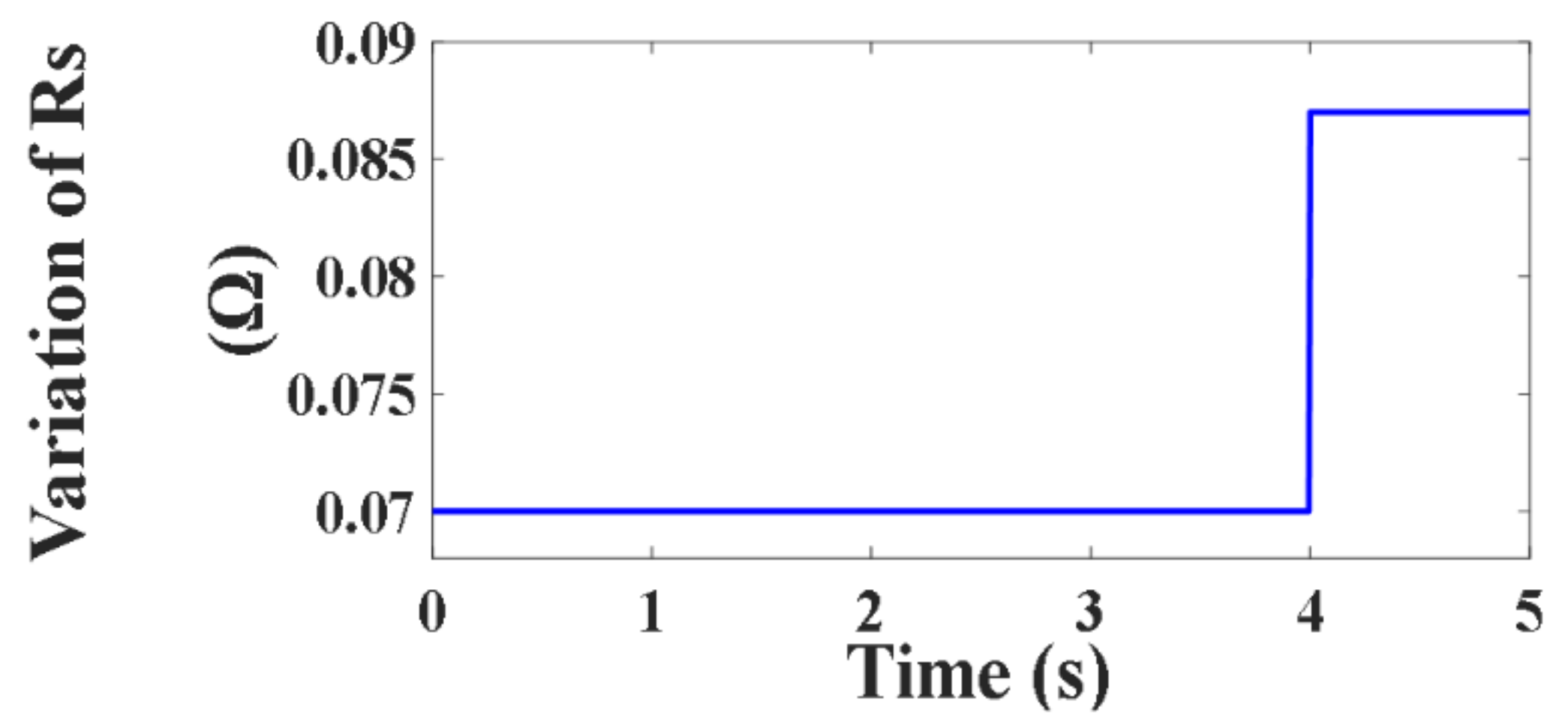
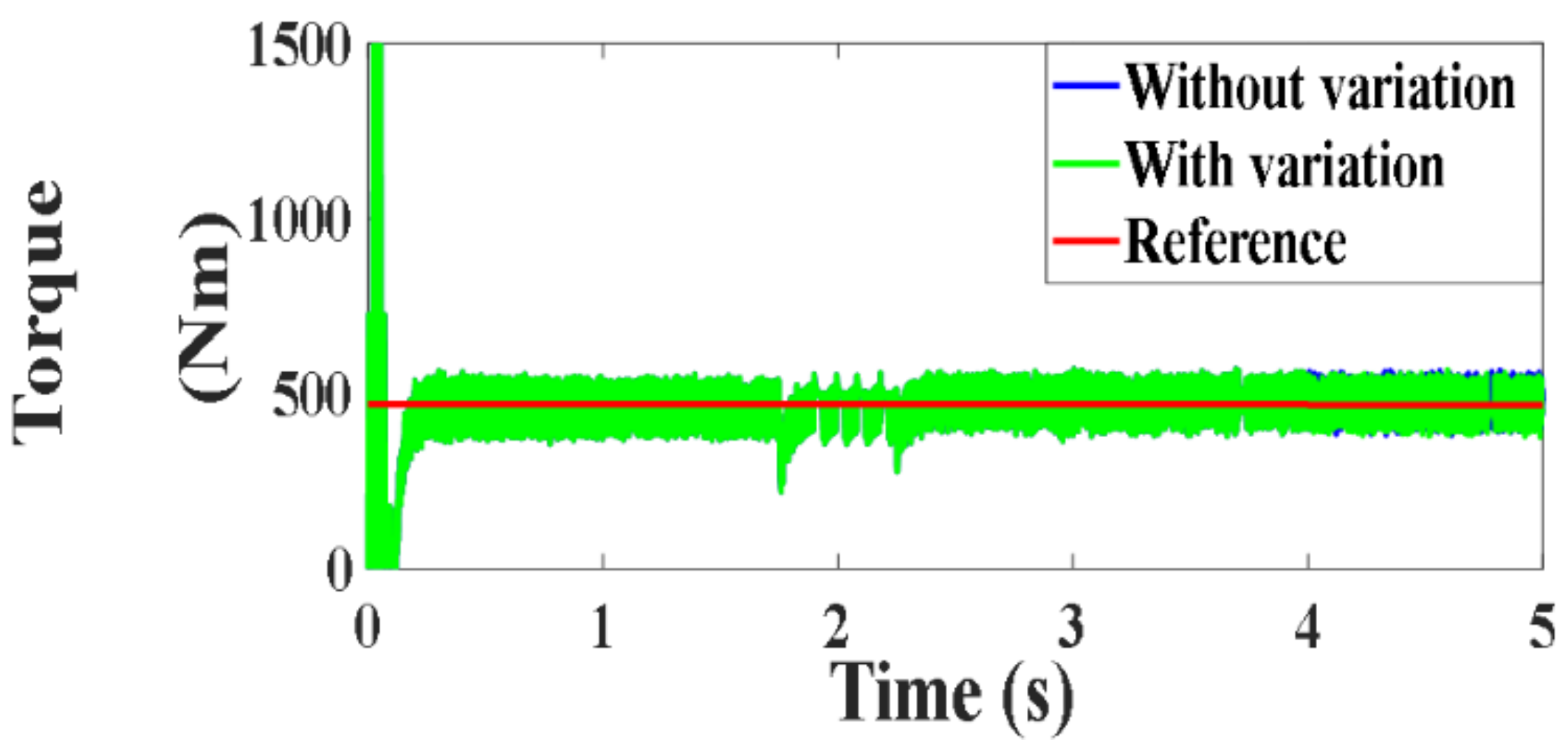
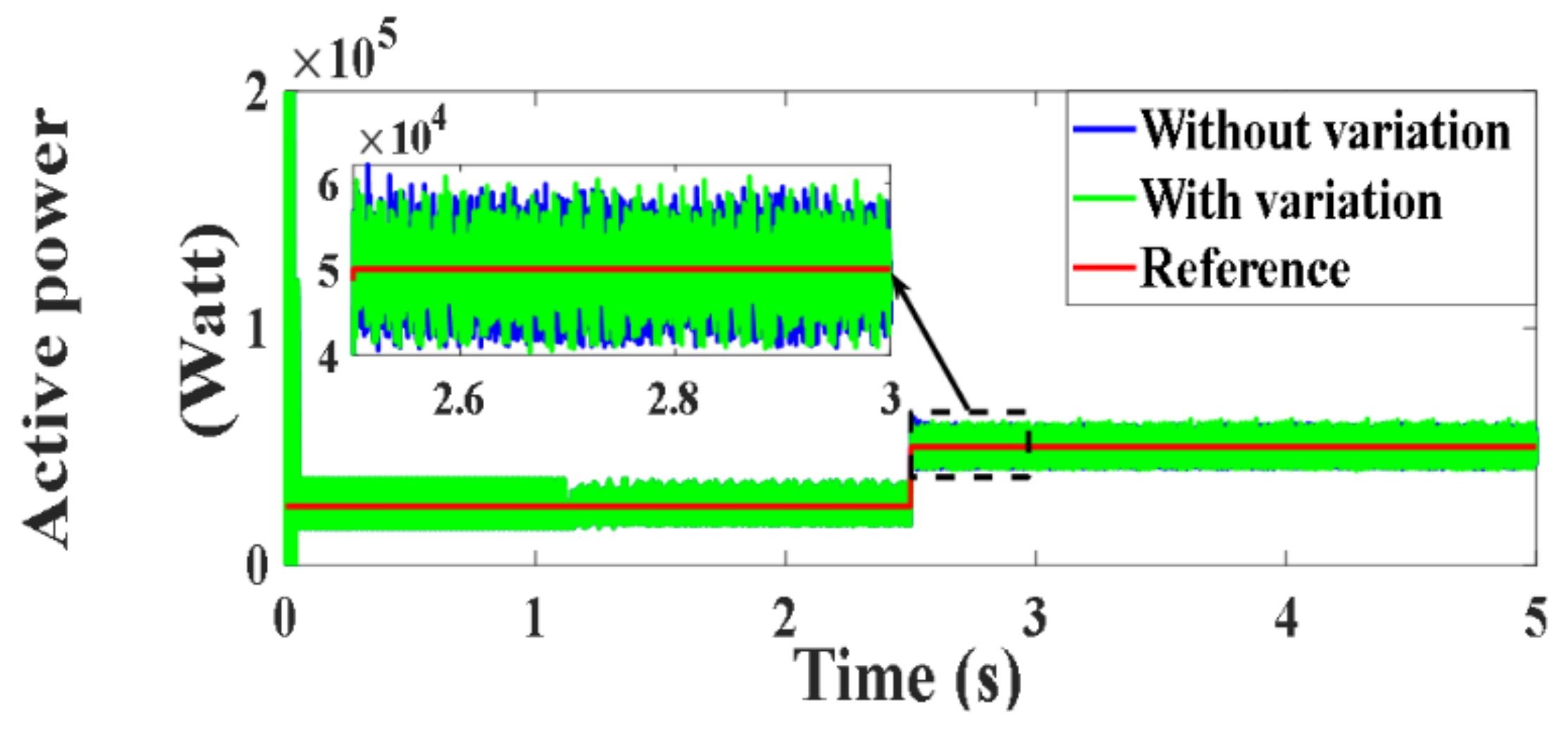
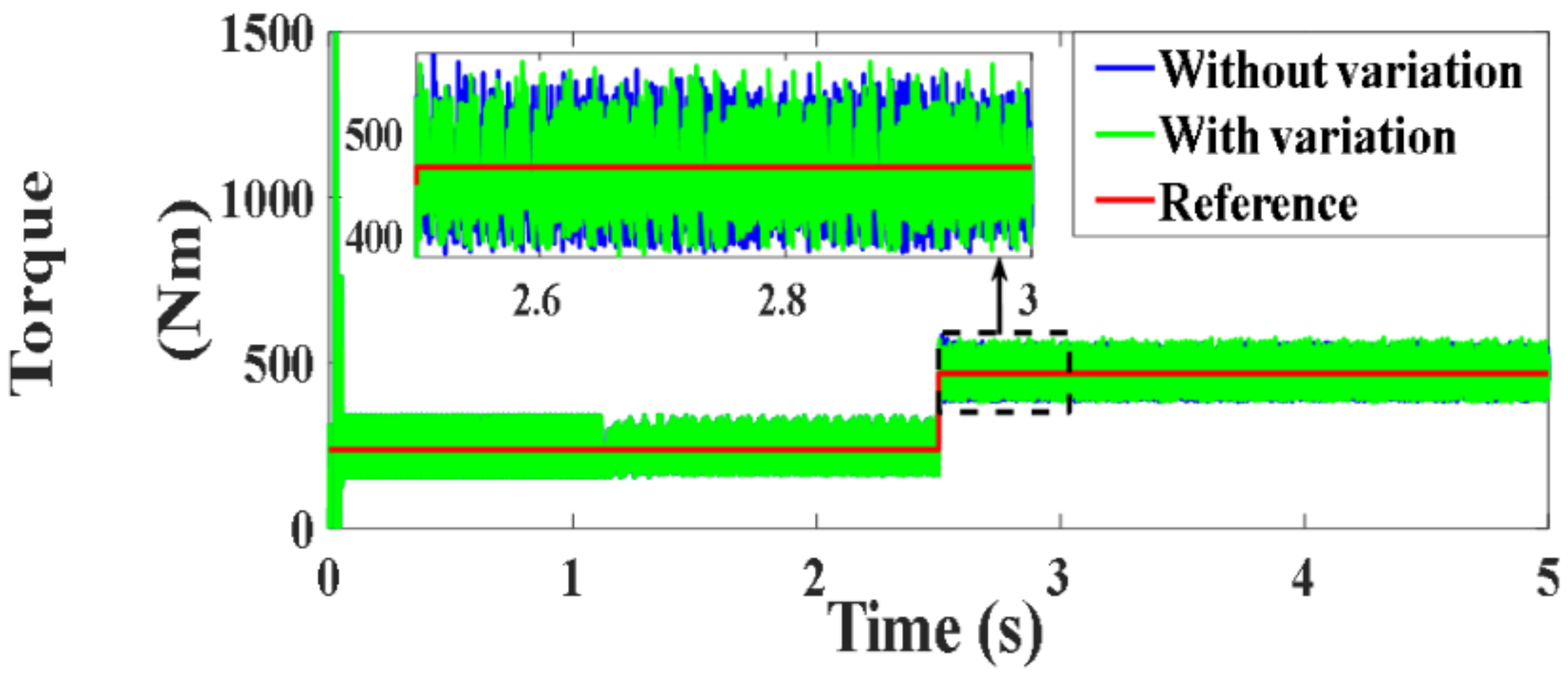
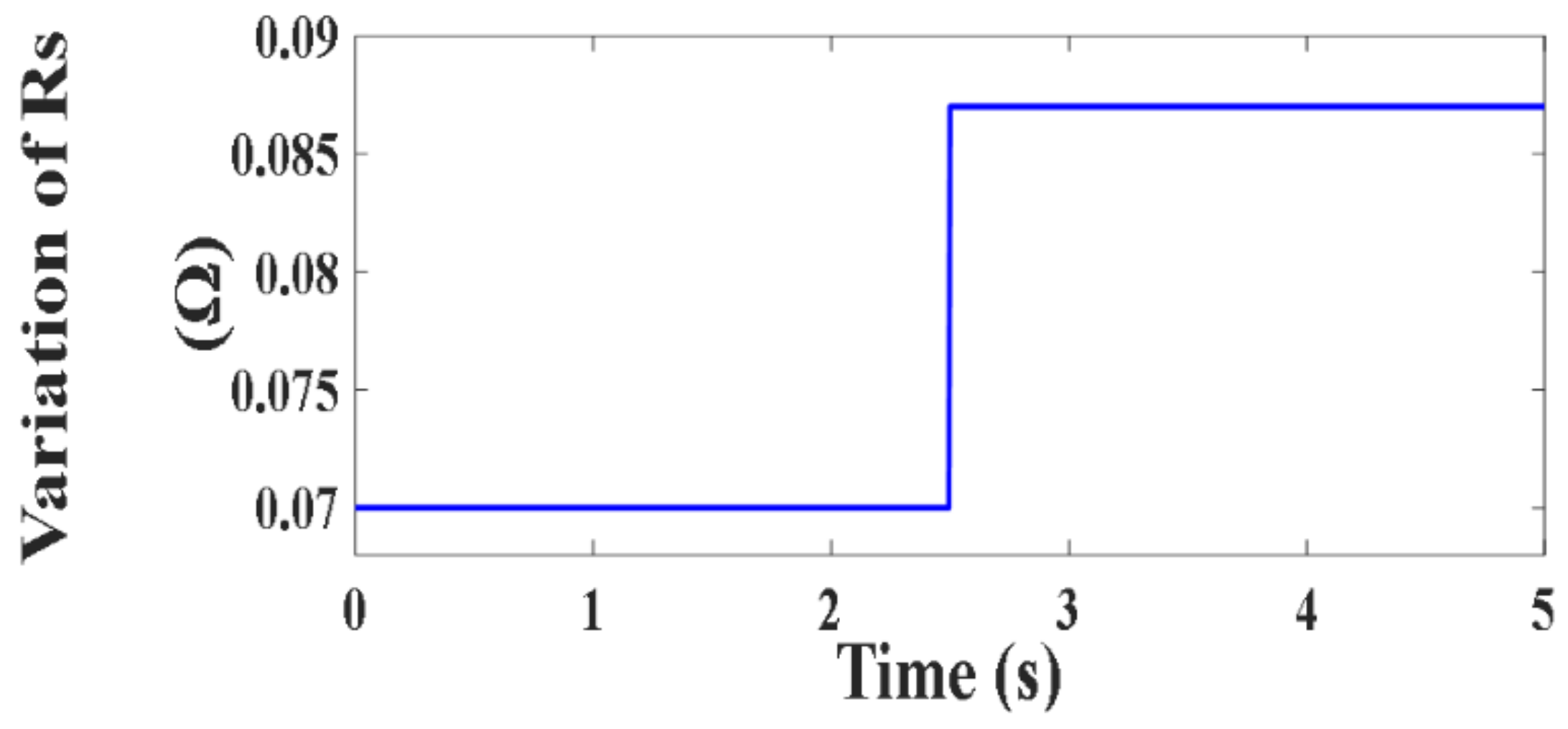
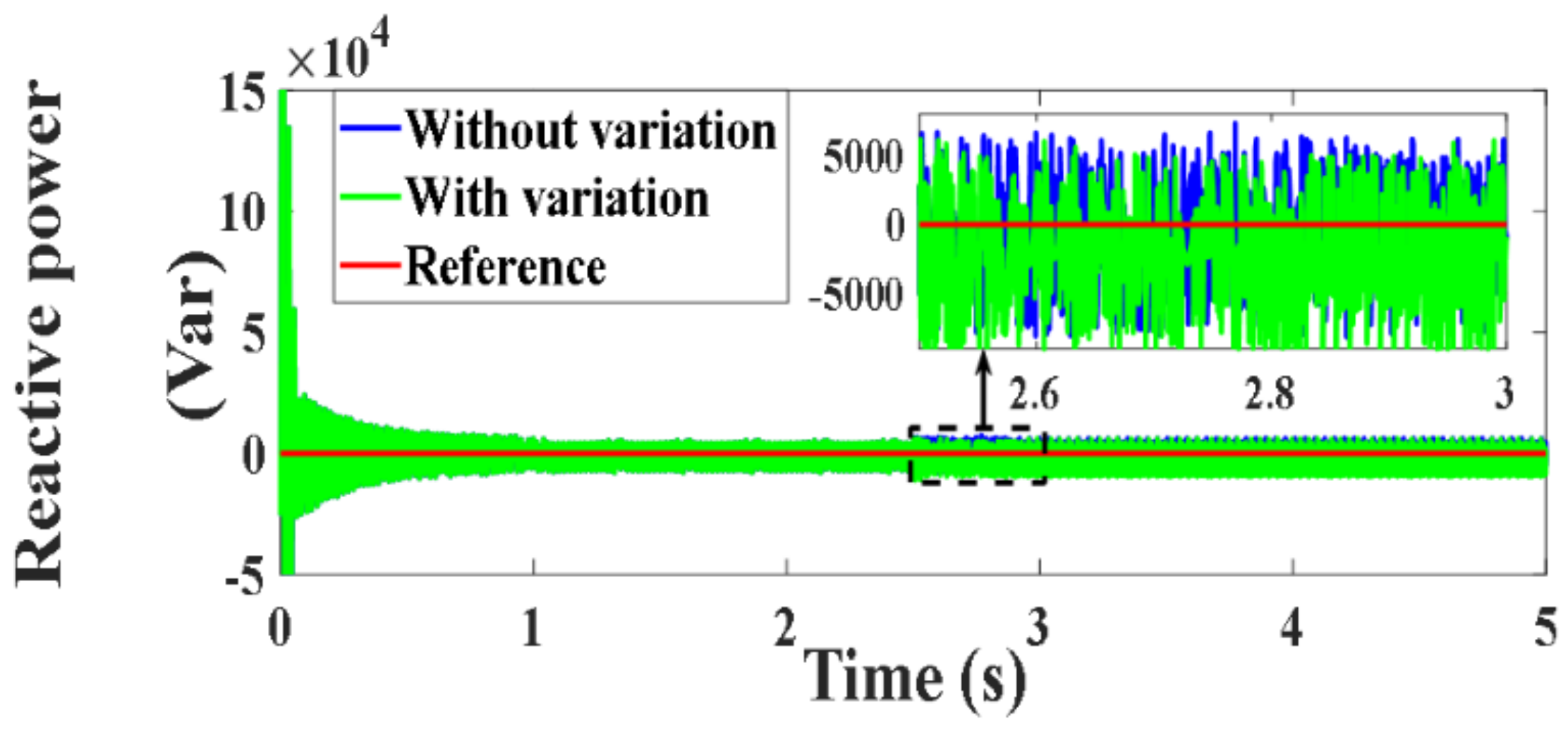
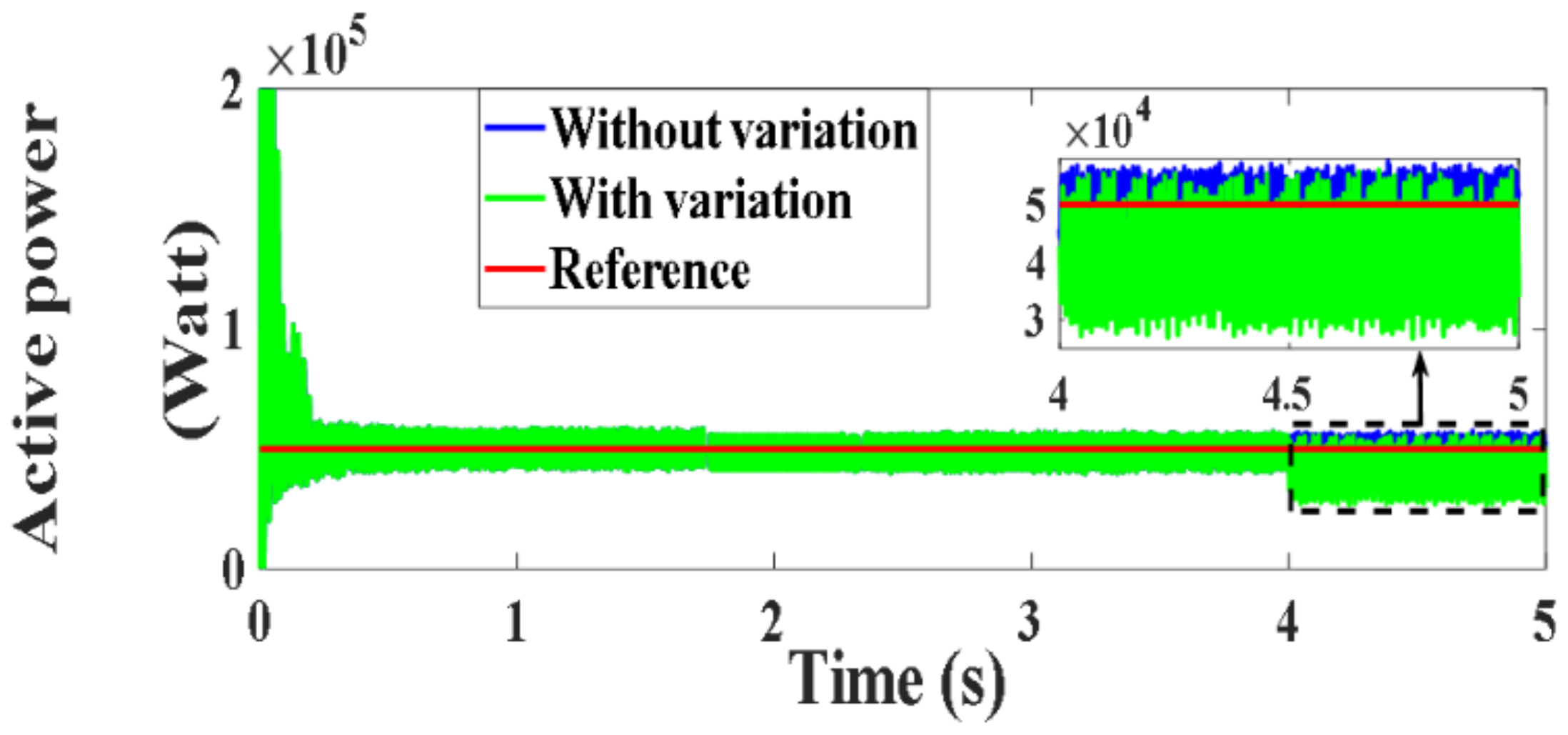
4.5.1. Testing under Proposed PVC with 20% Variation of Rs
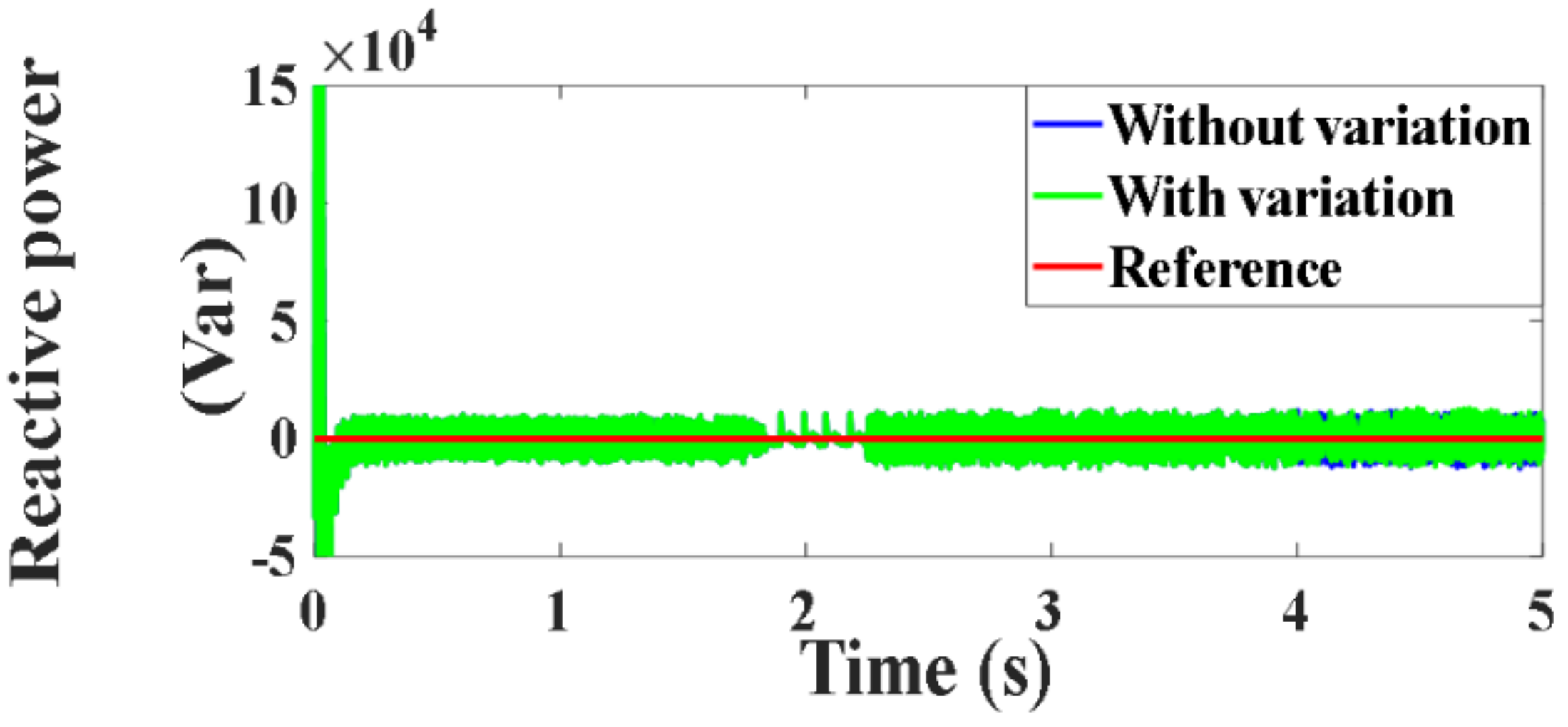
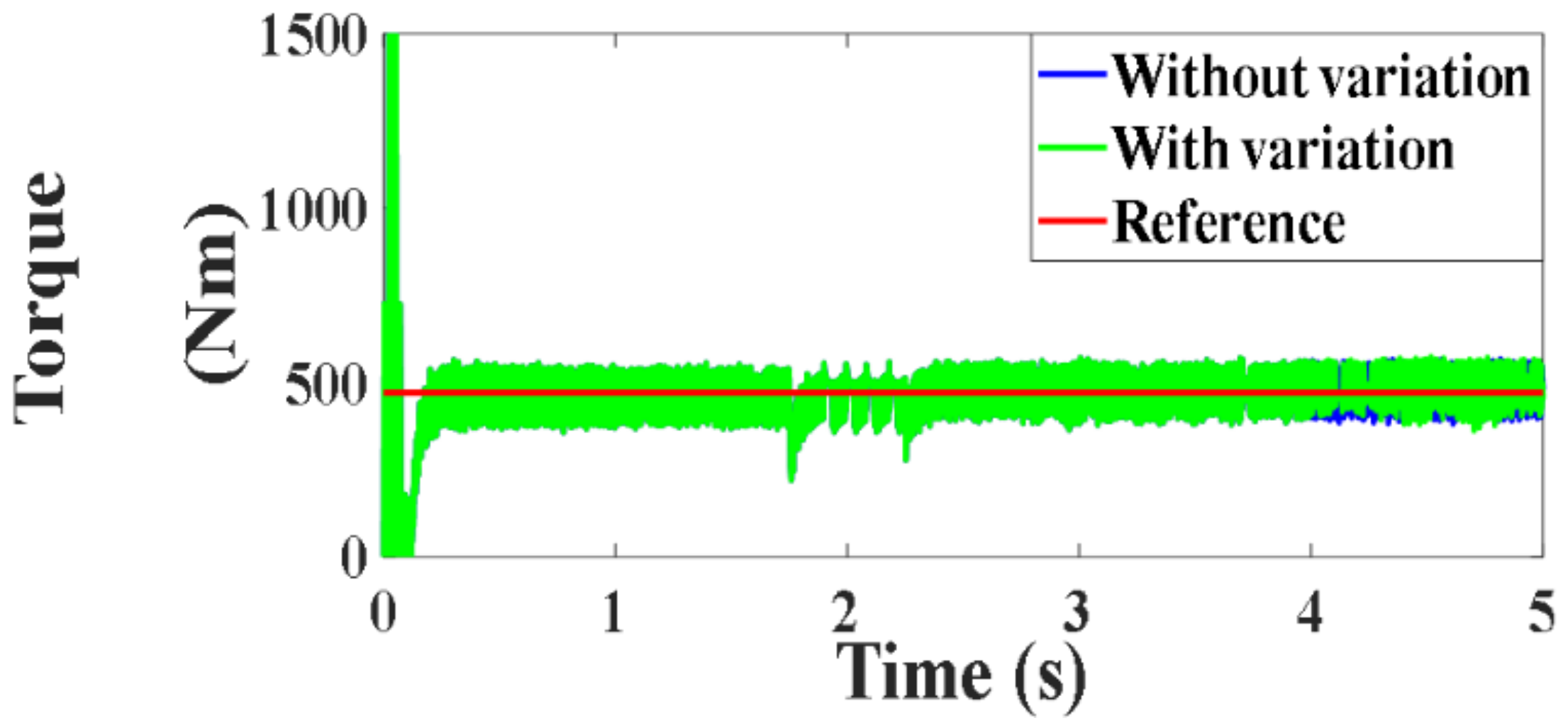
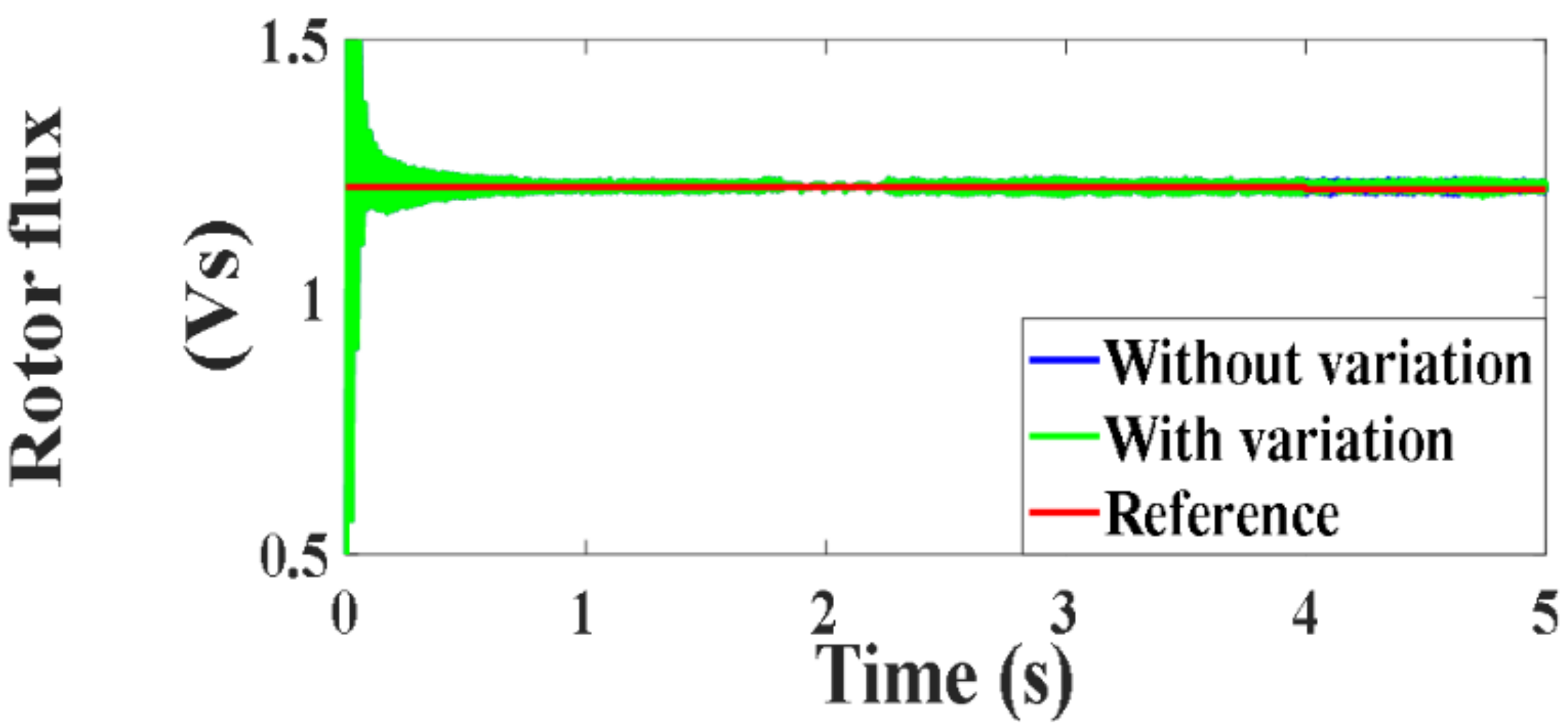
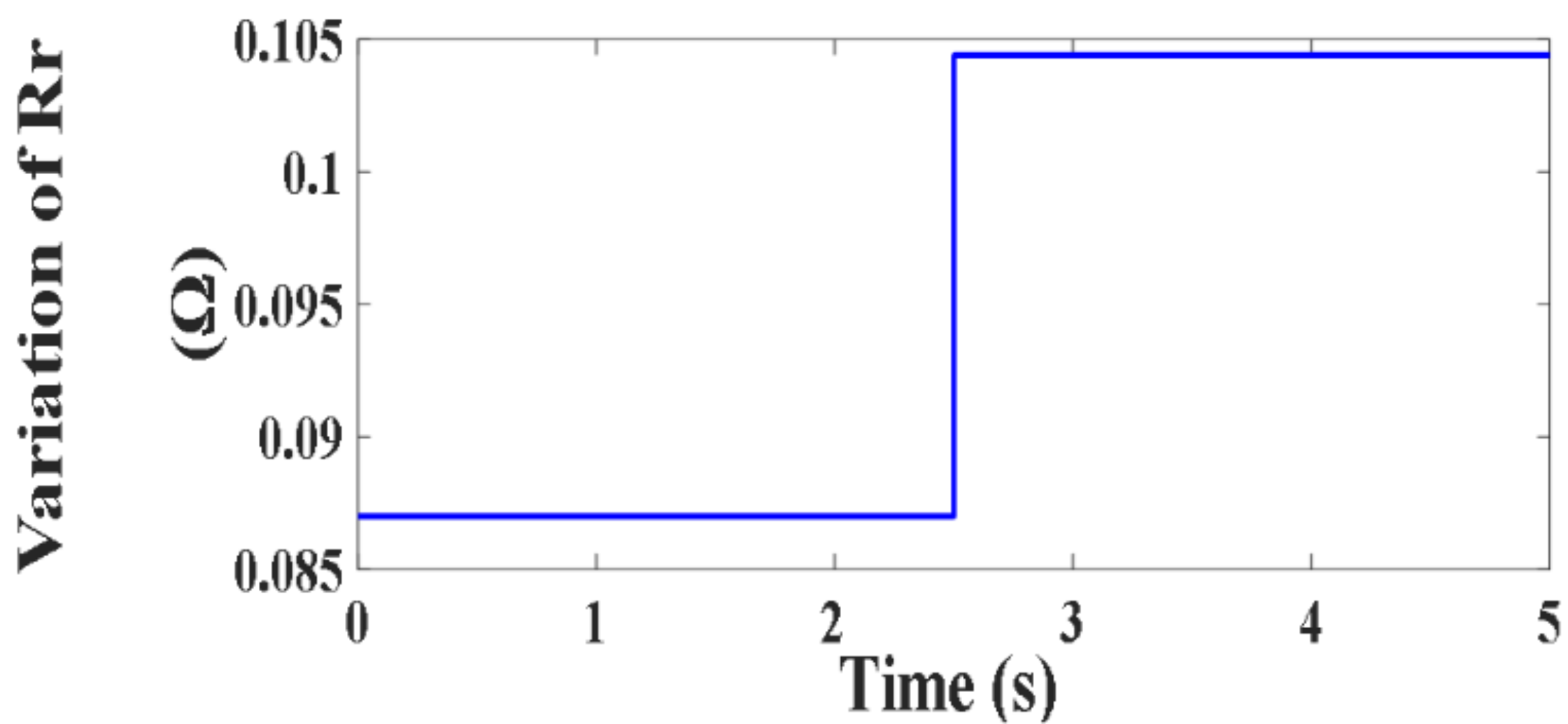
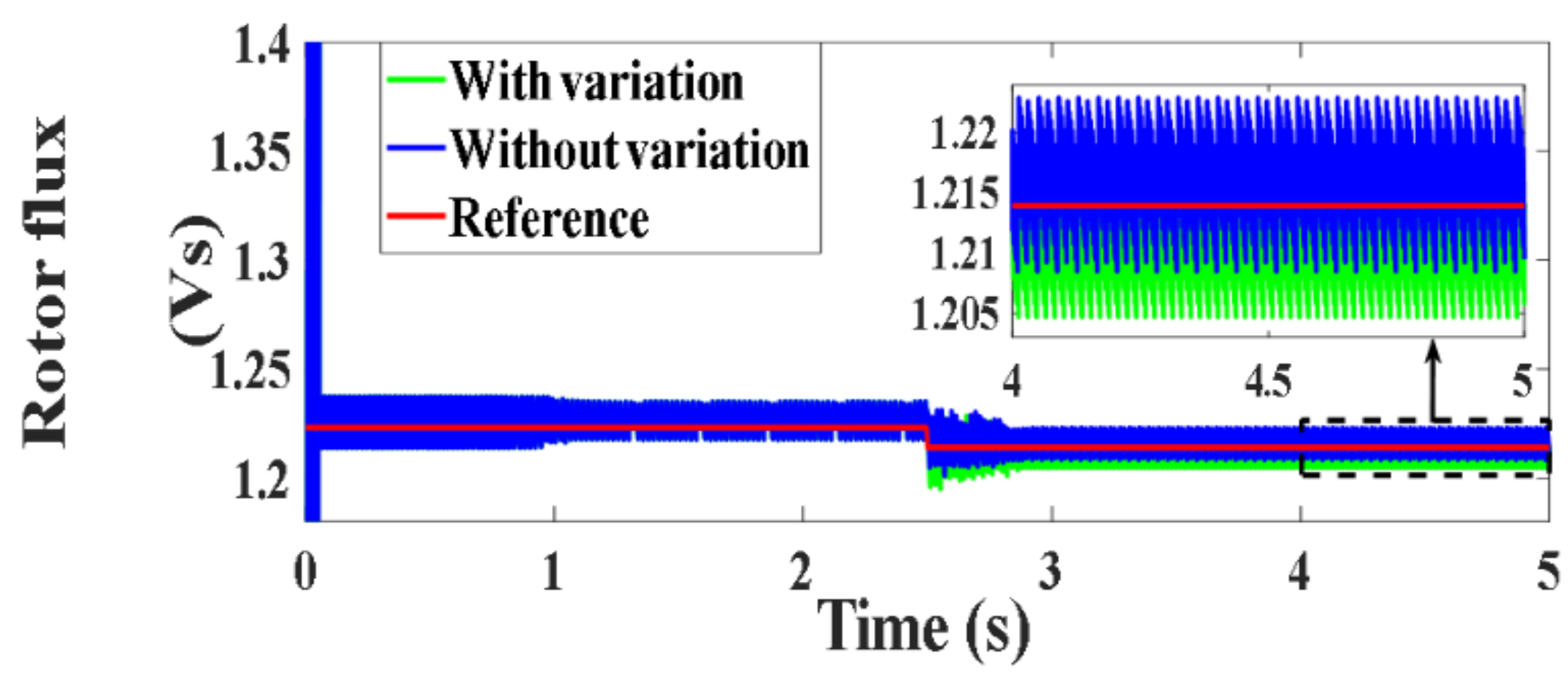
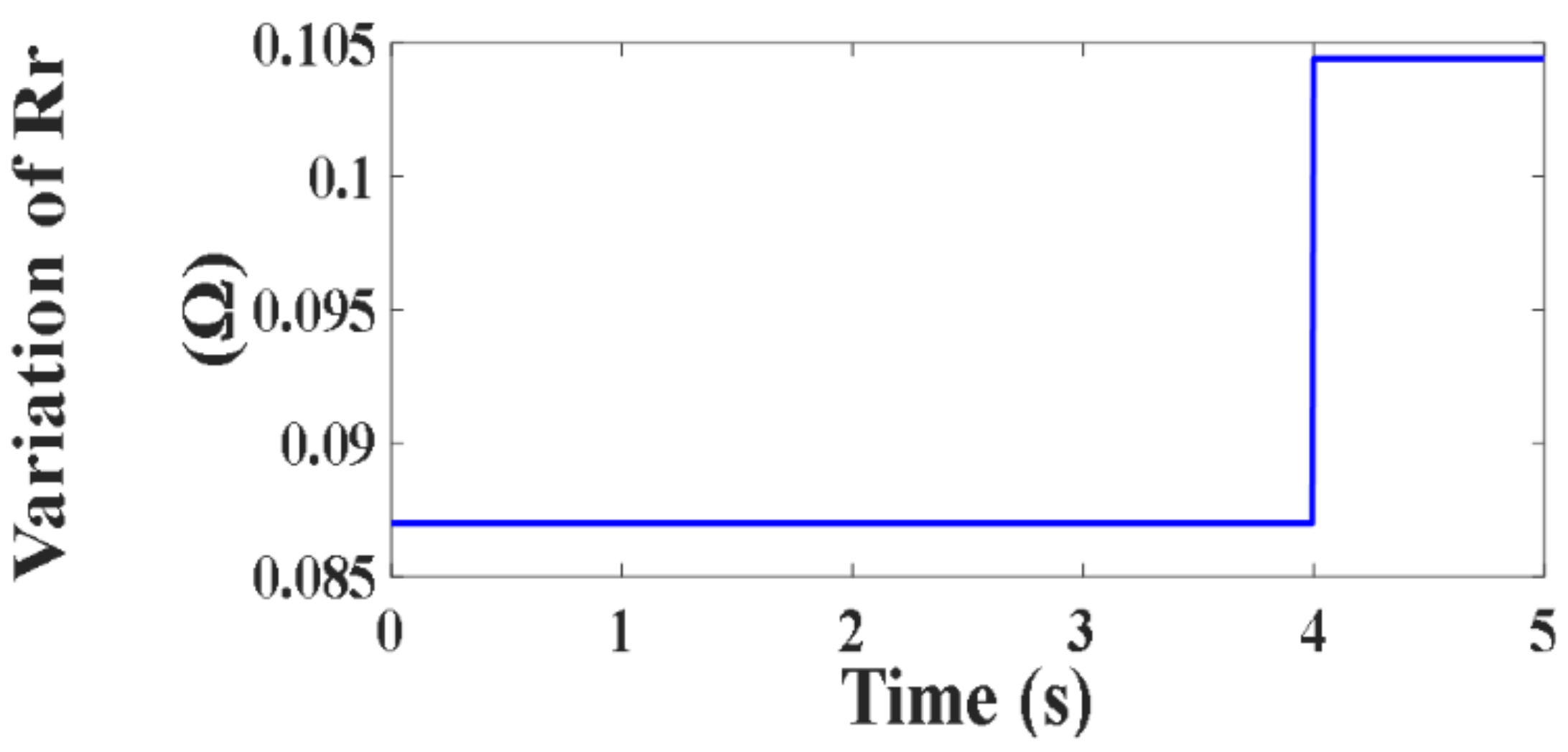
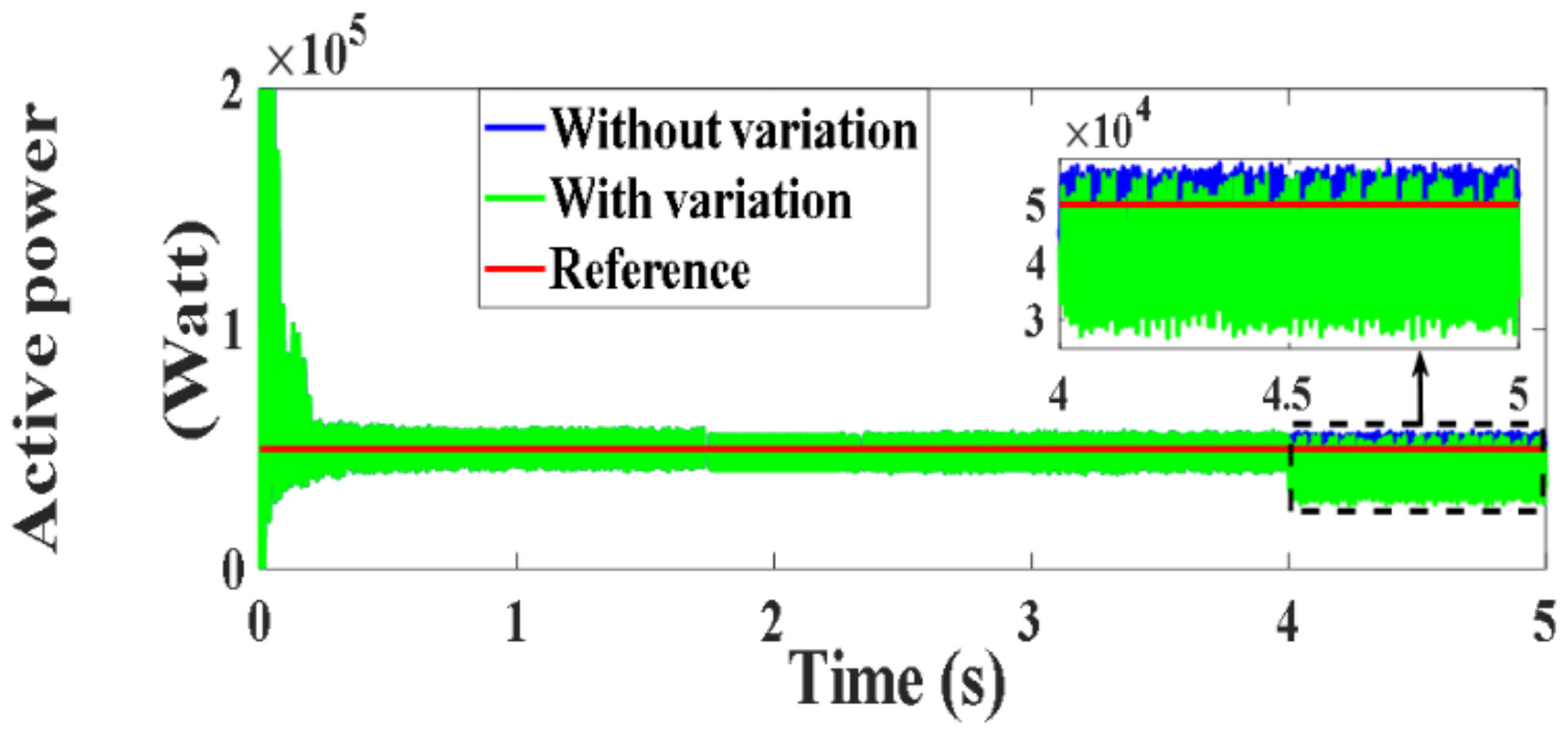
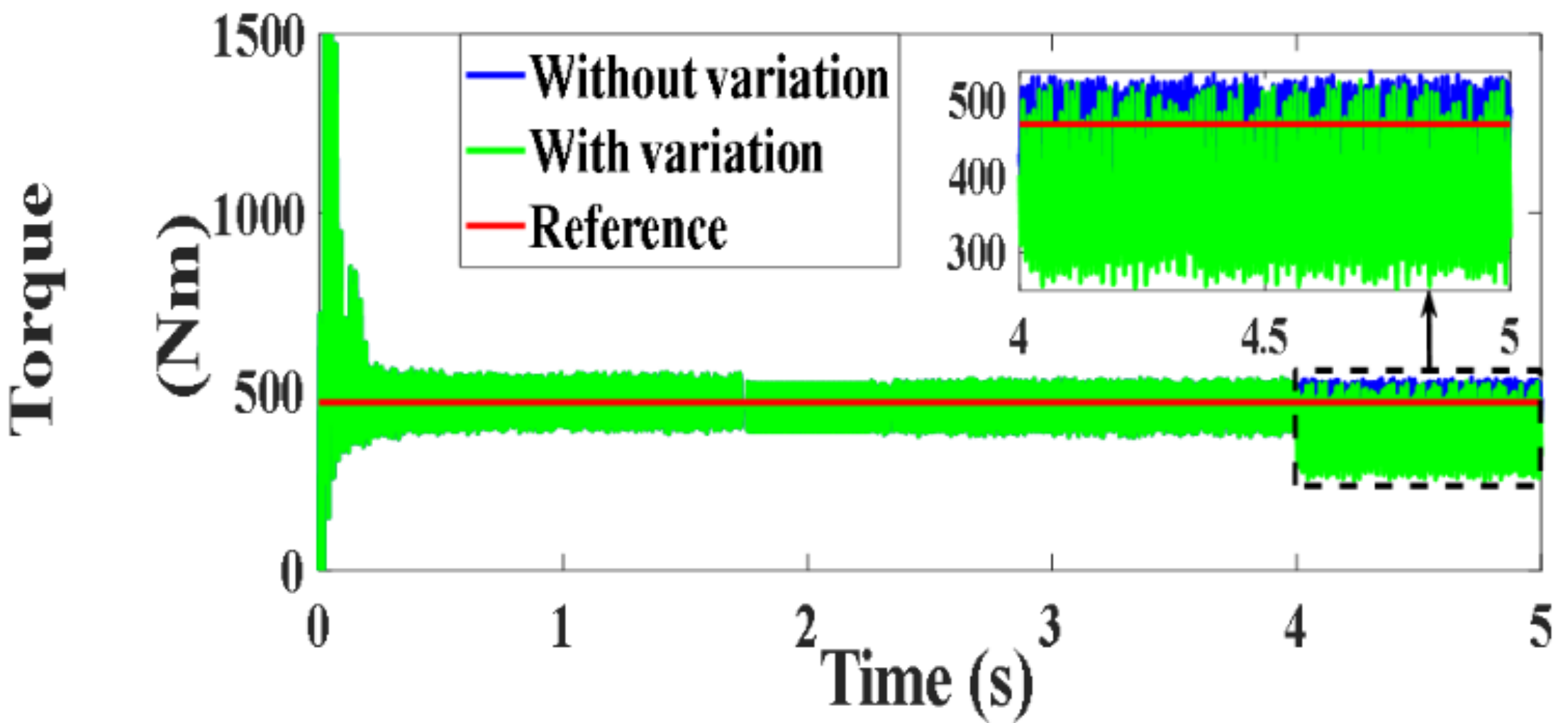
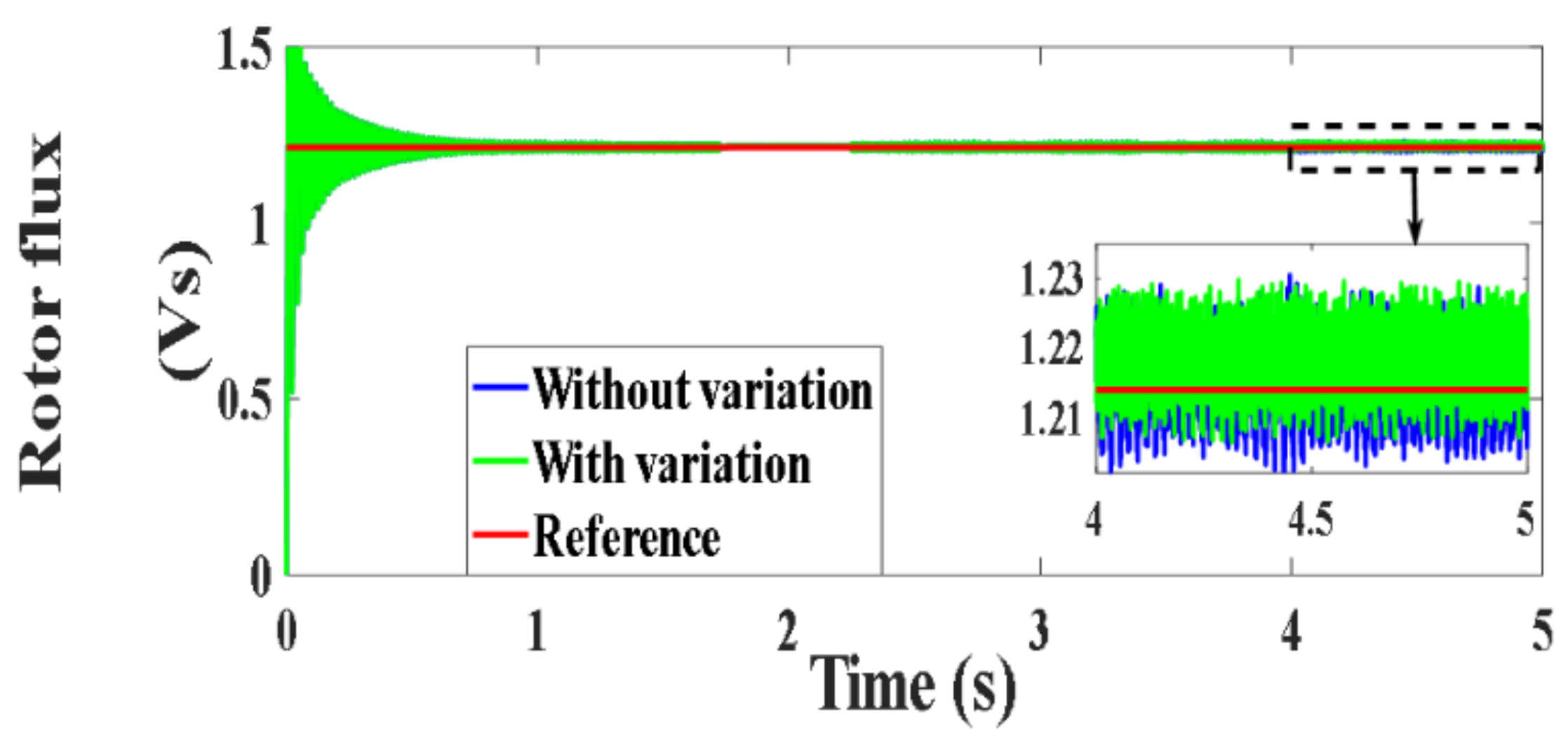
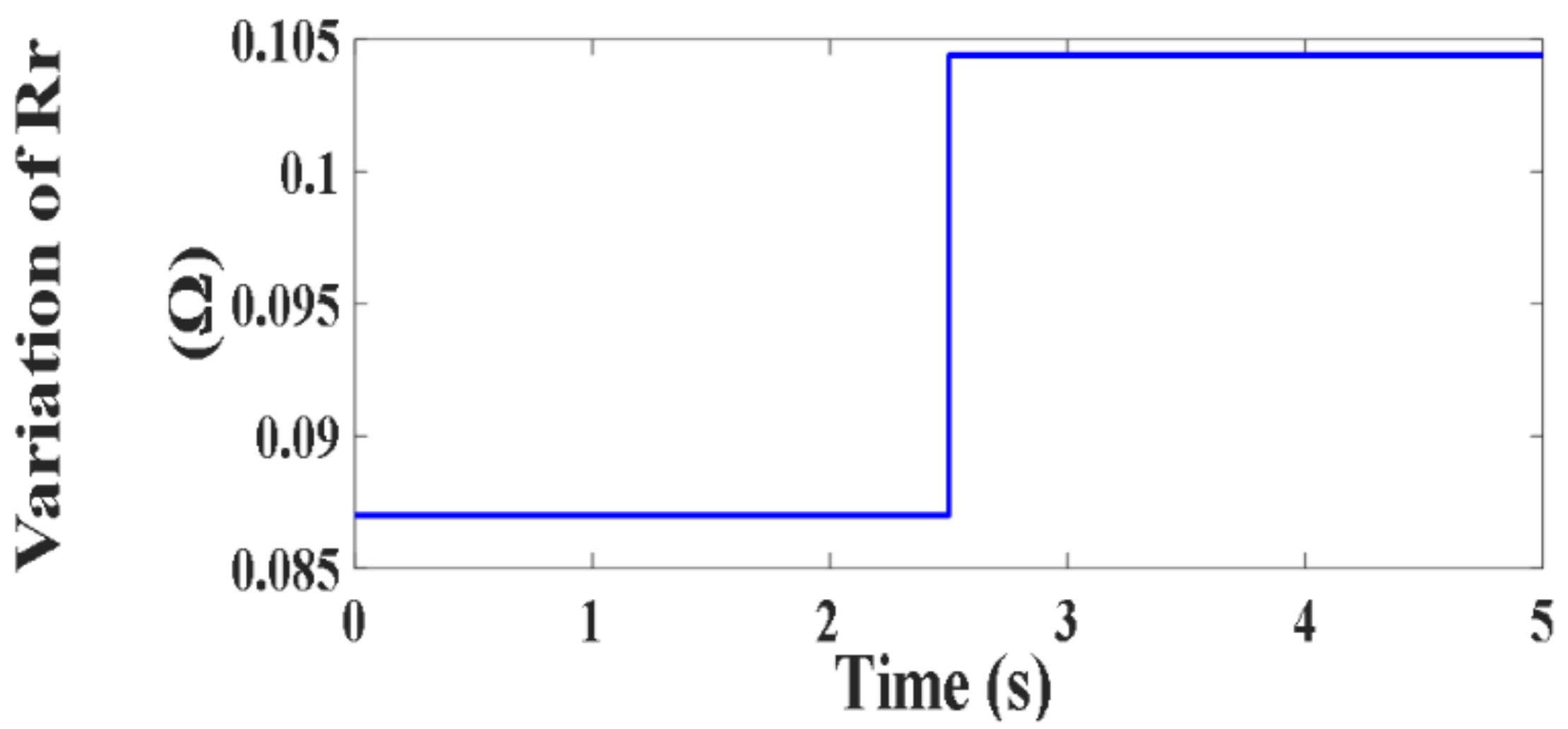
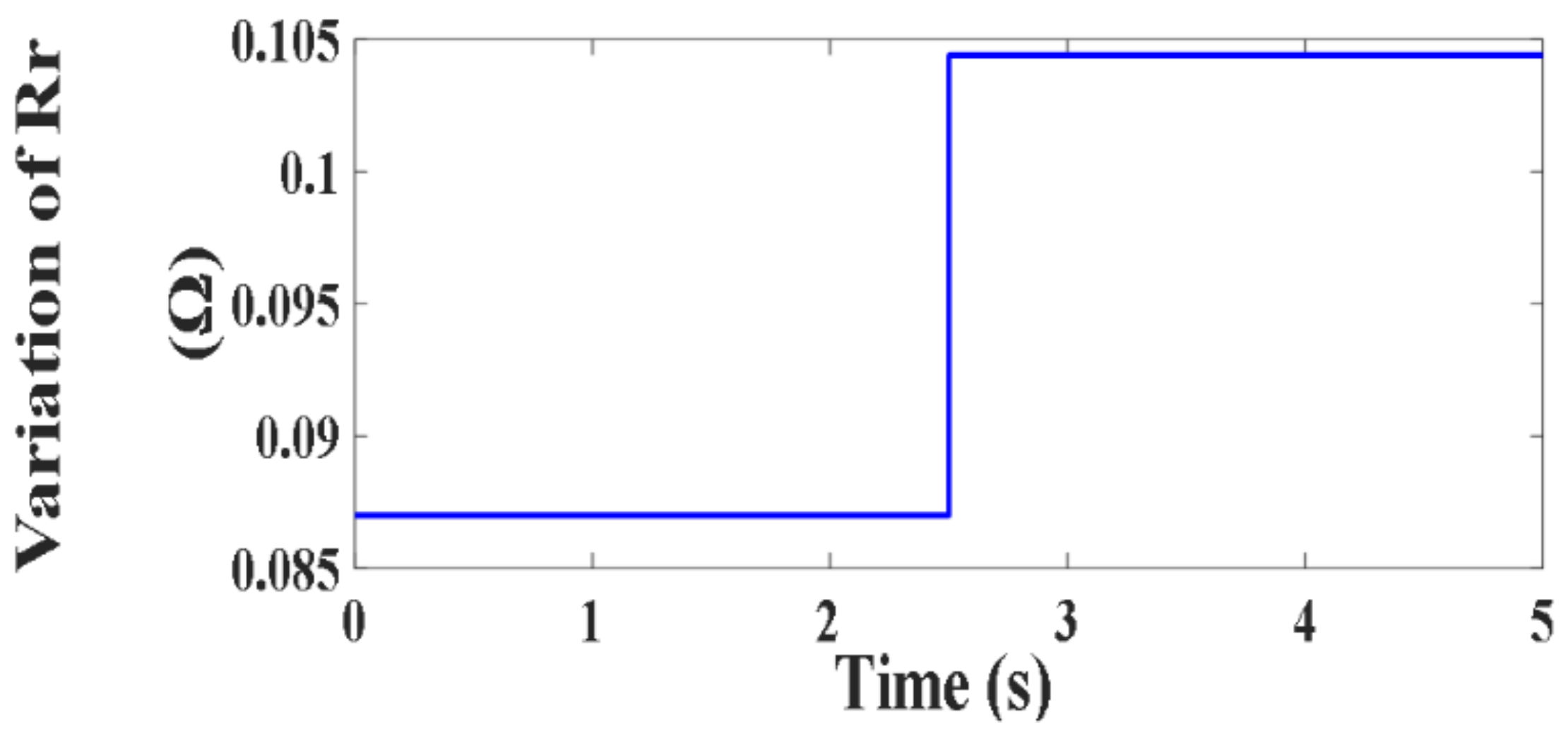
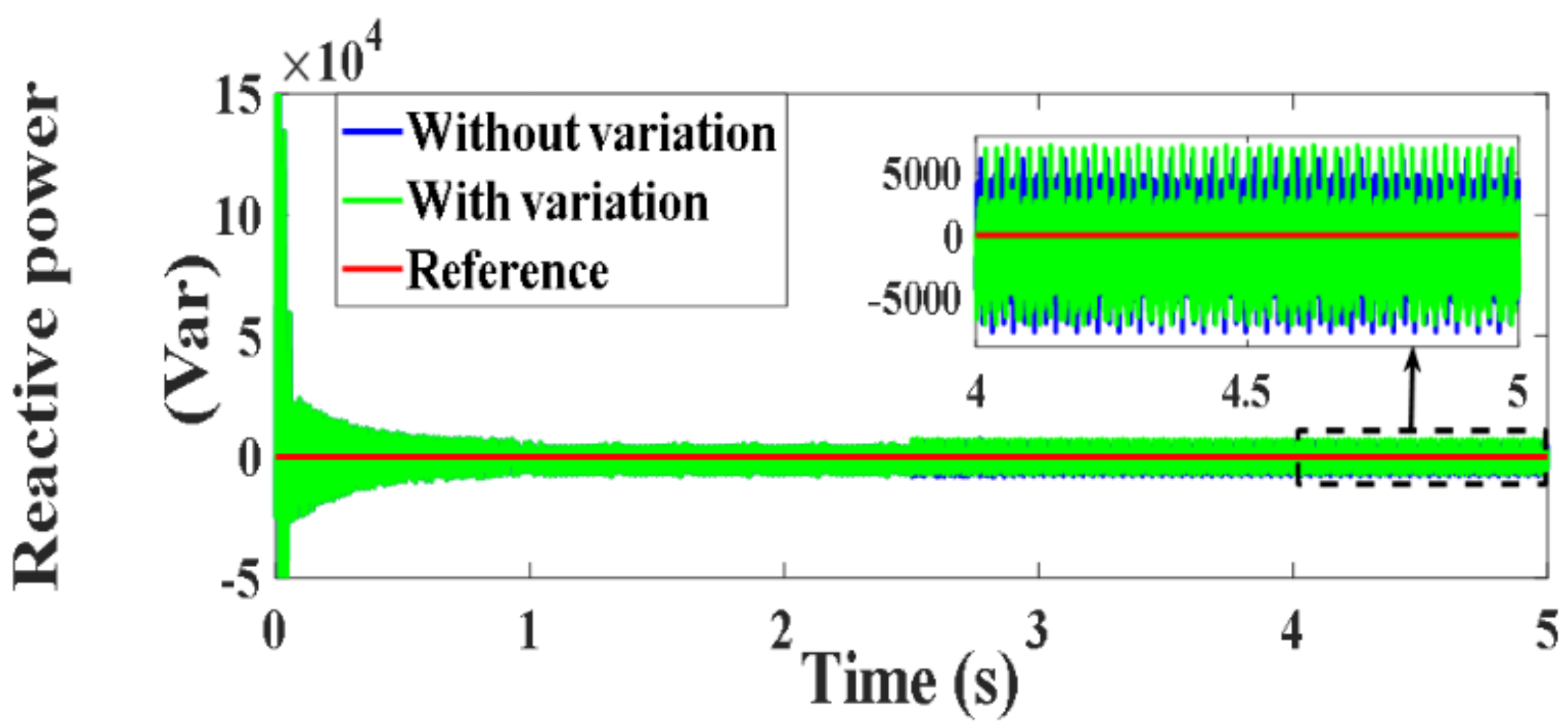
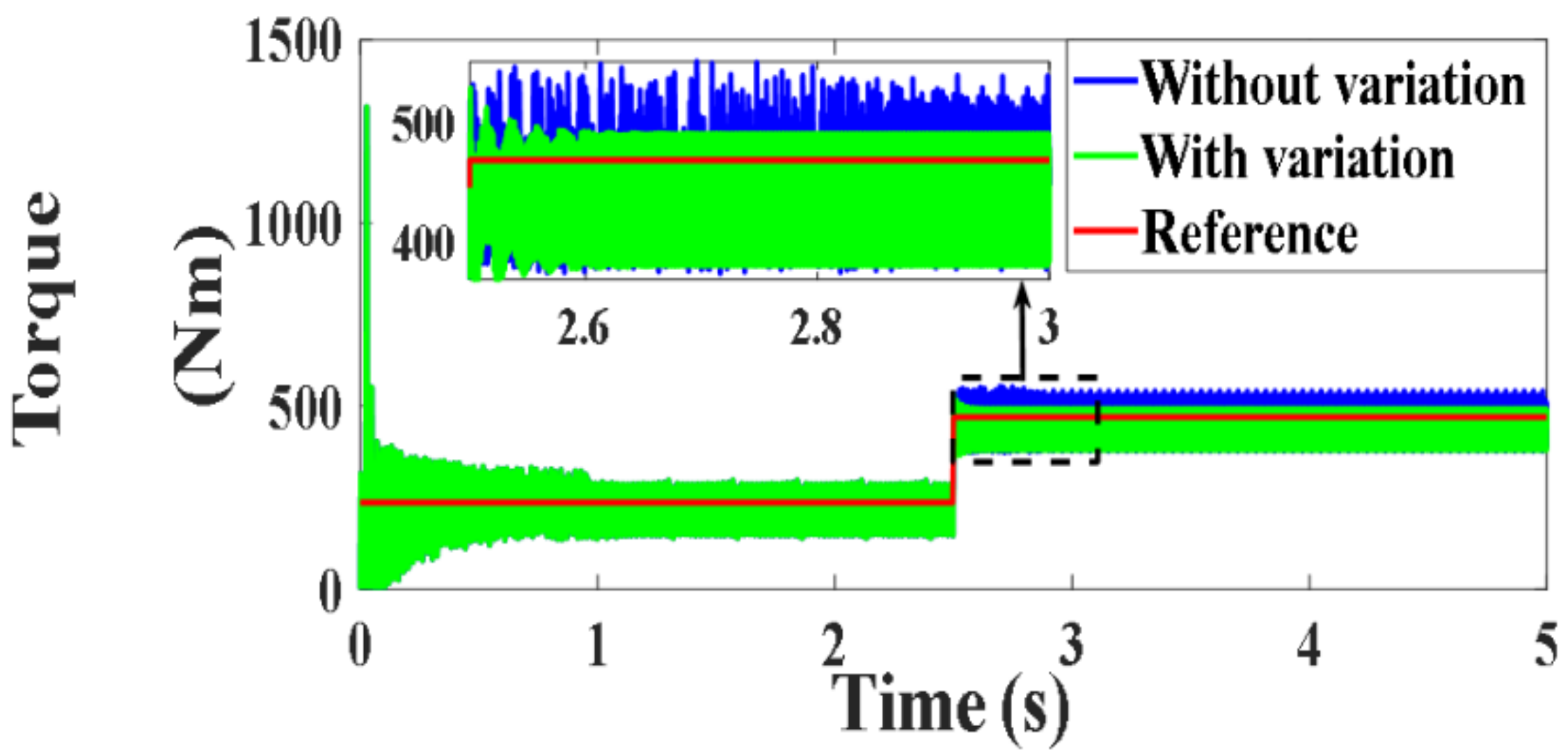
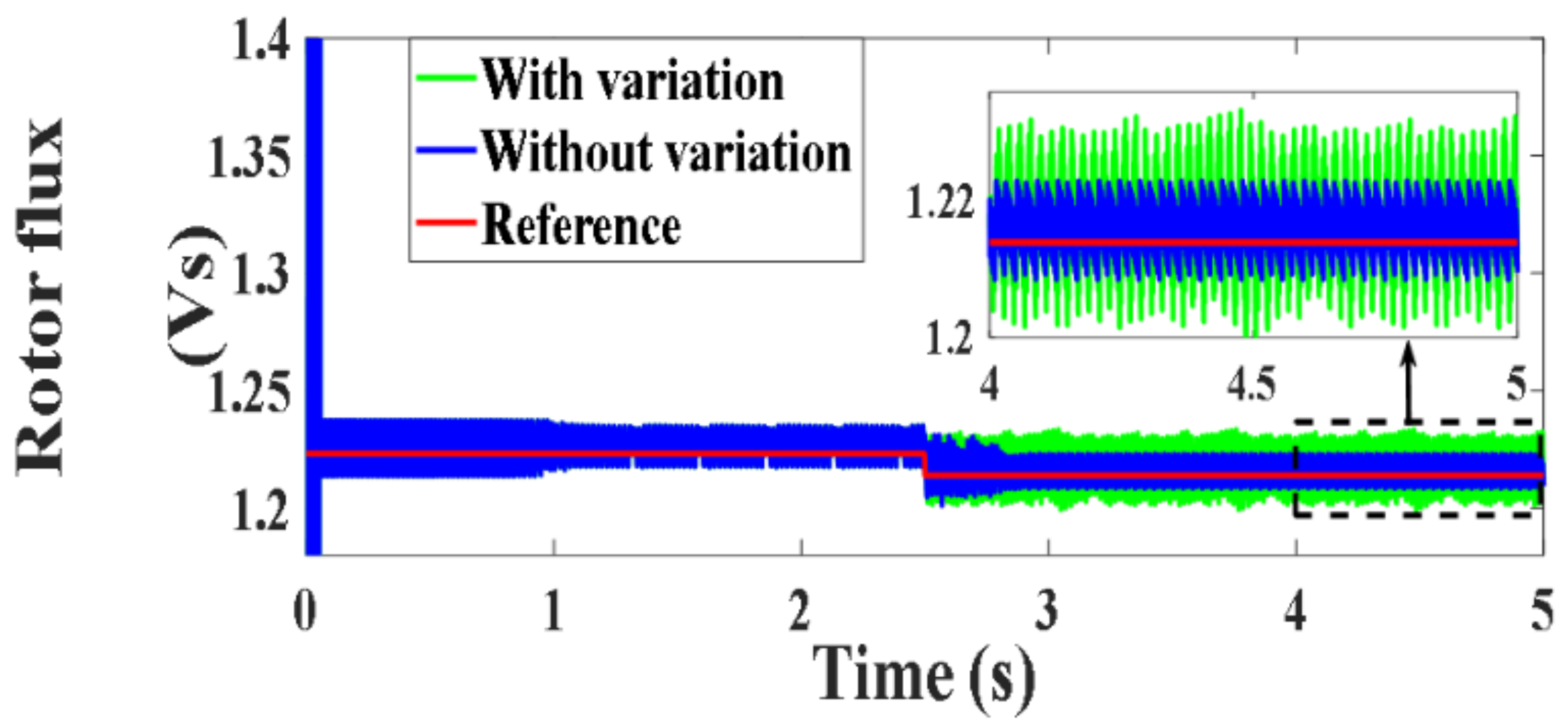
4.5.2. Testing under Proposed PVC with 20% Variation of Rr
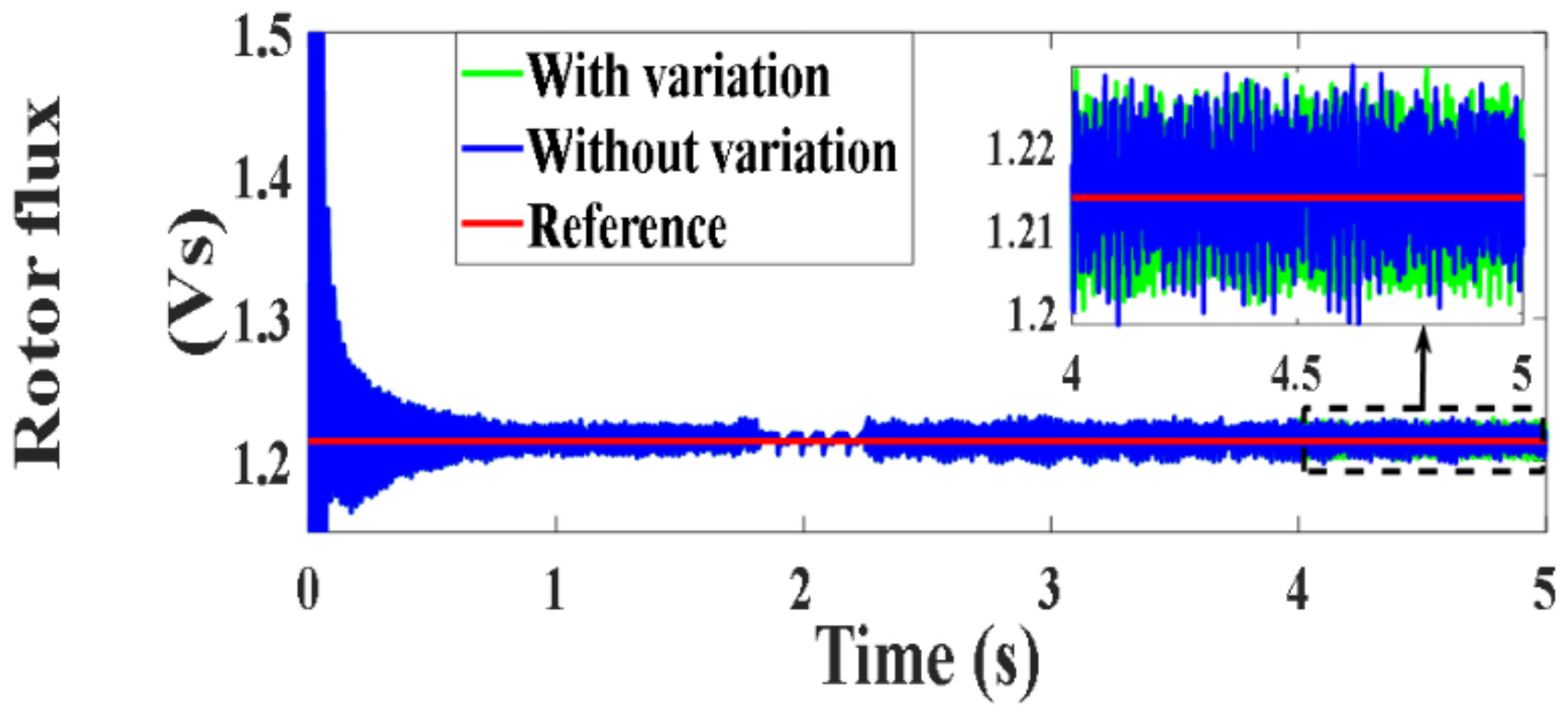
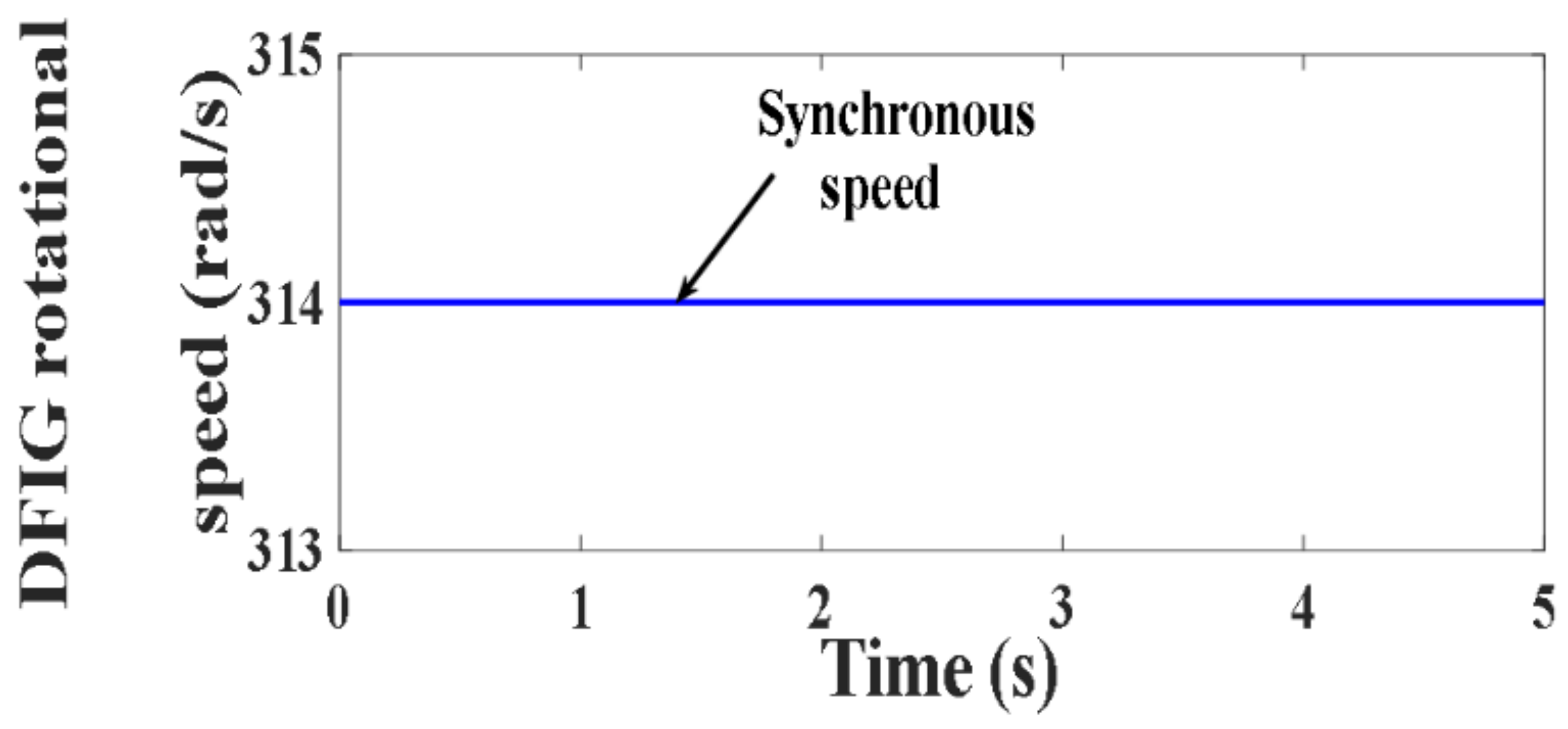
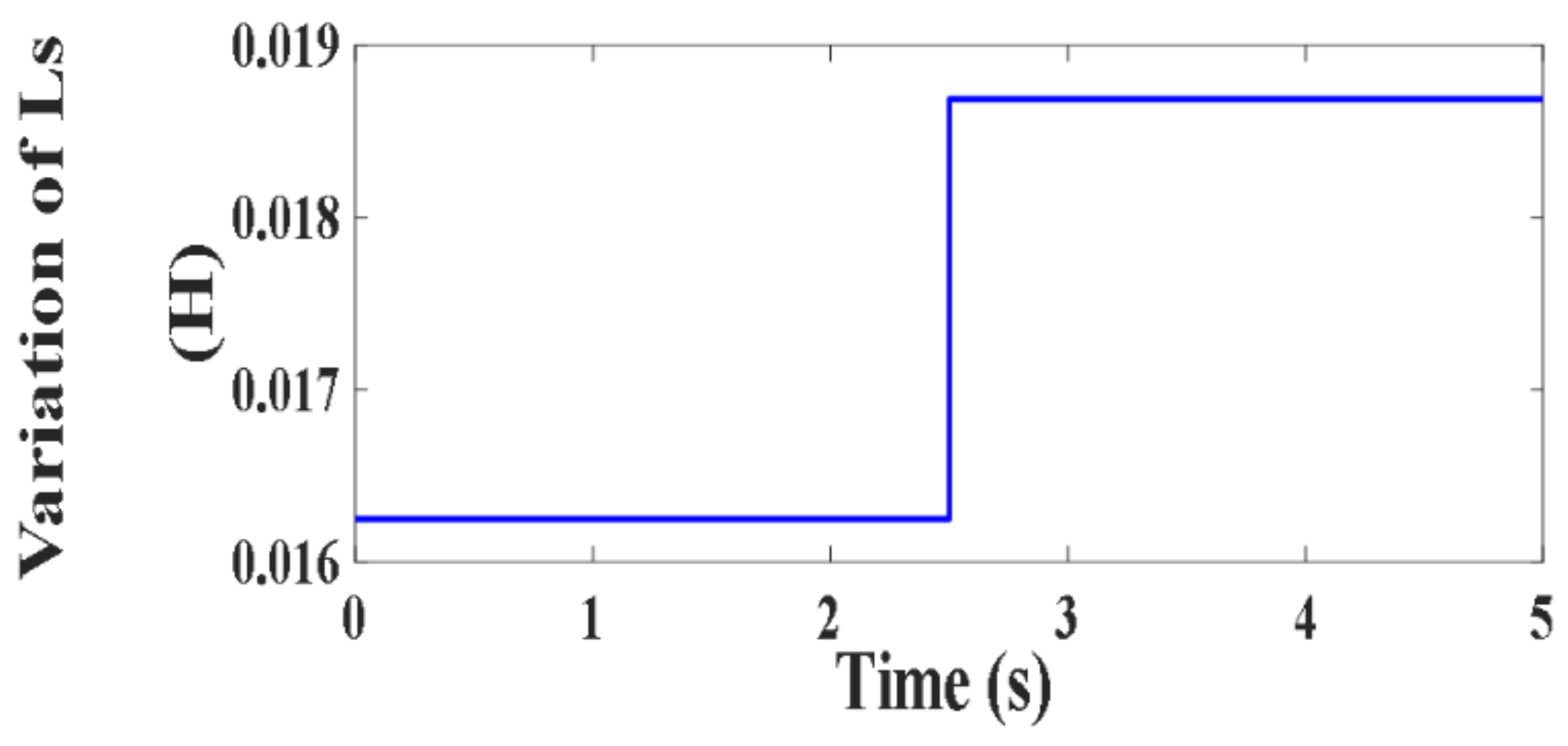
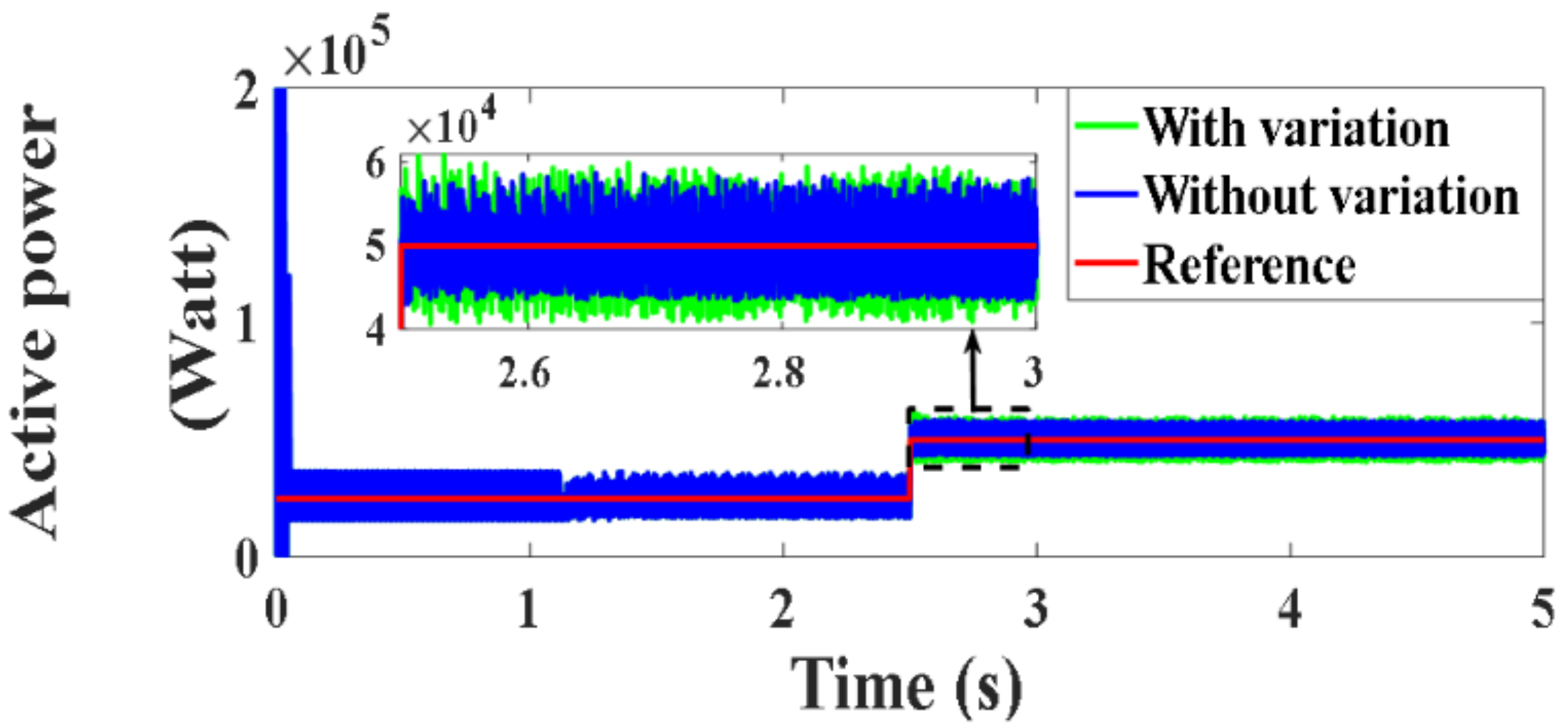
4.5.3. Testing under Proposed PVC with 15% Variation of Ls
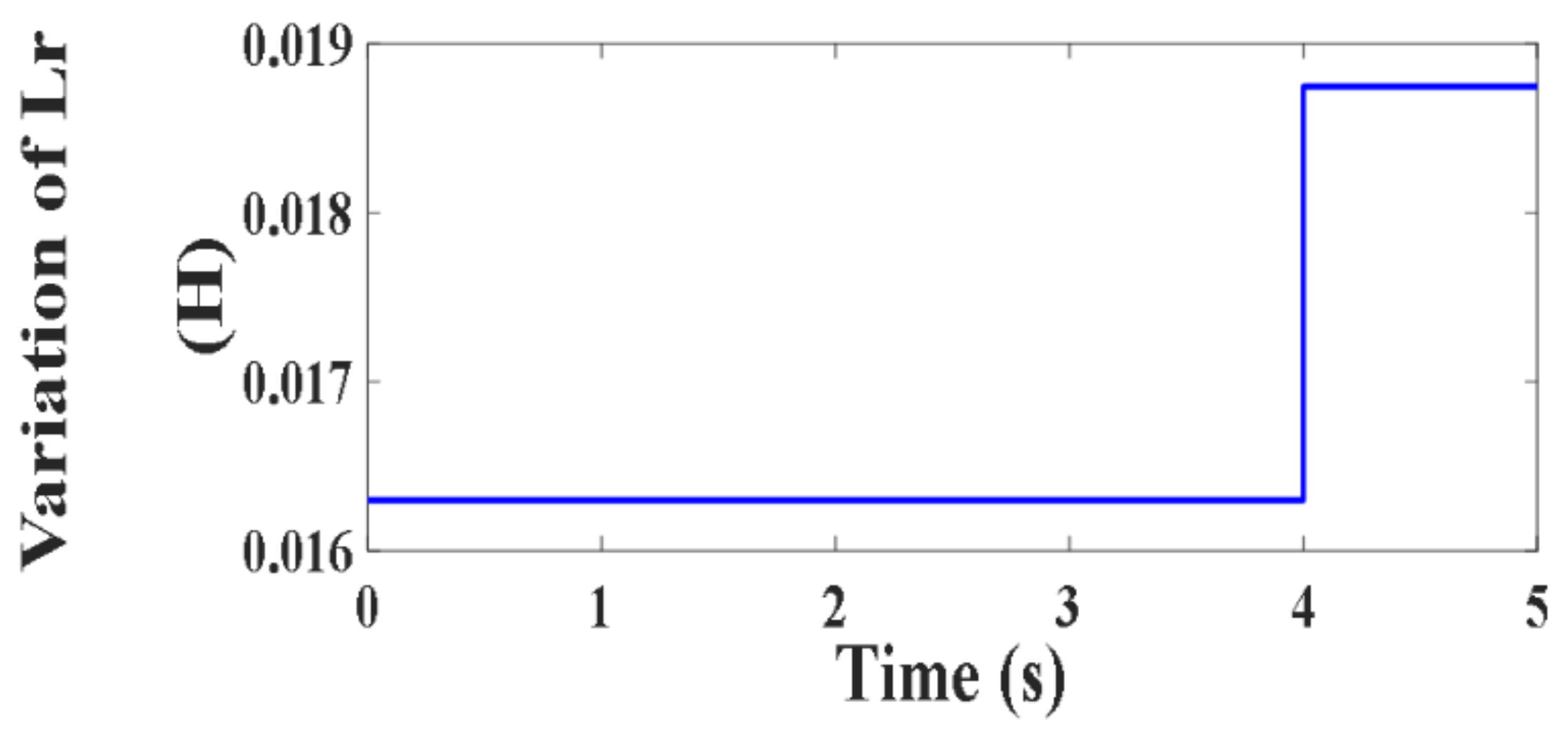
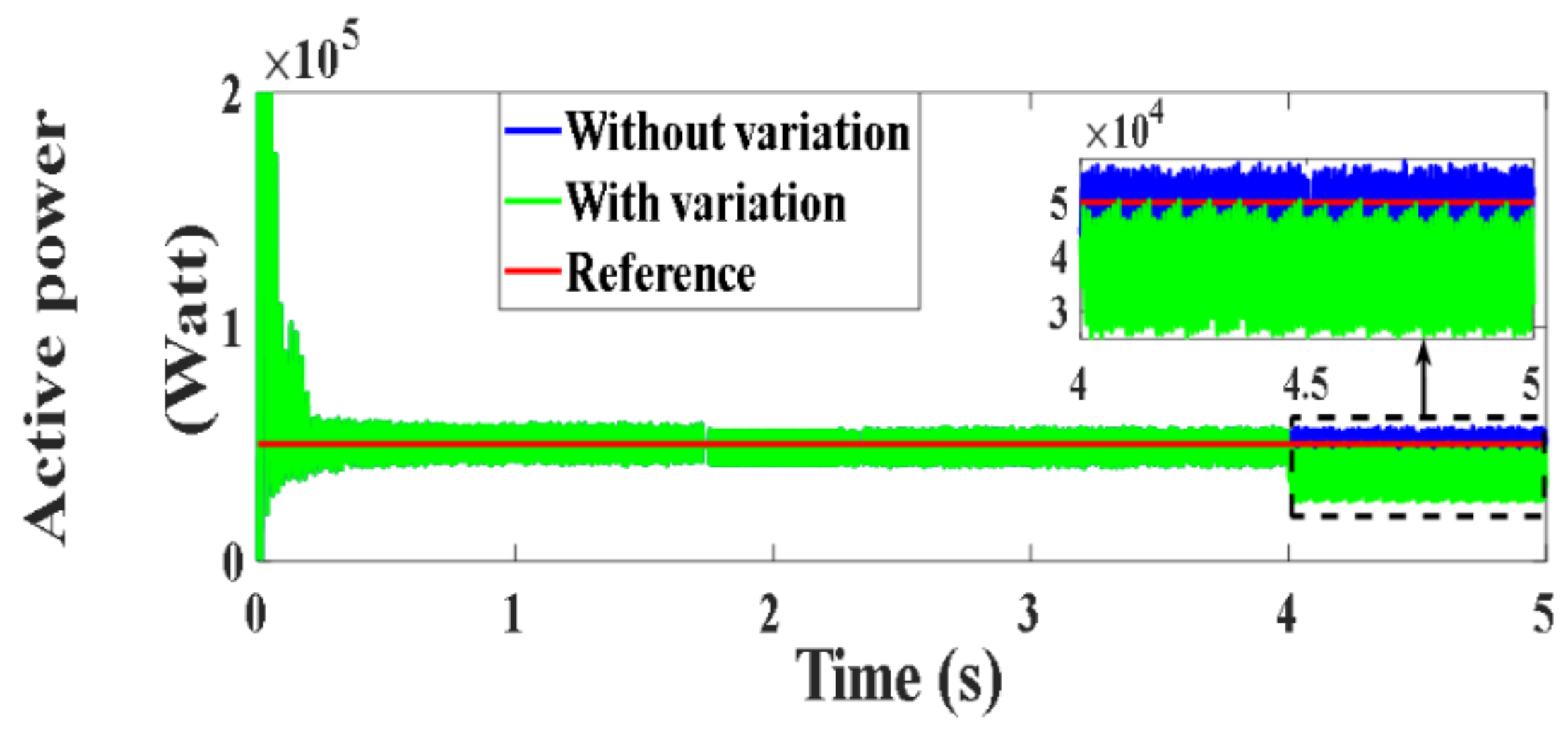
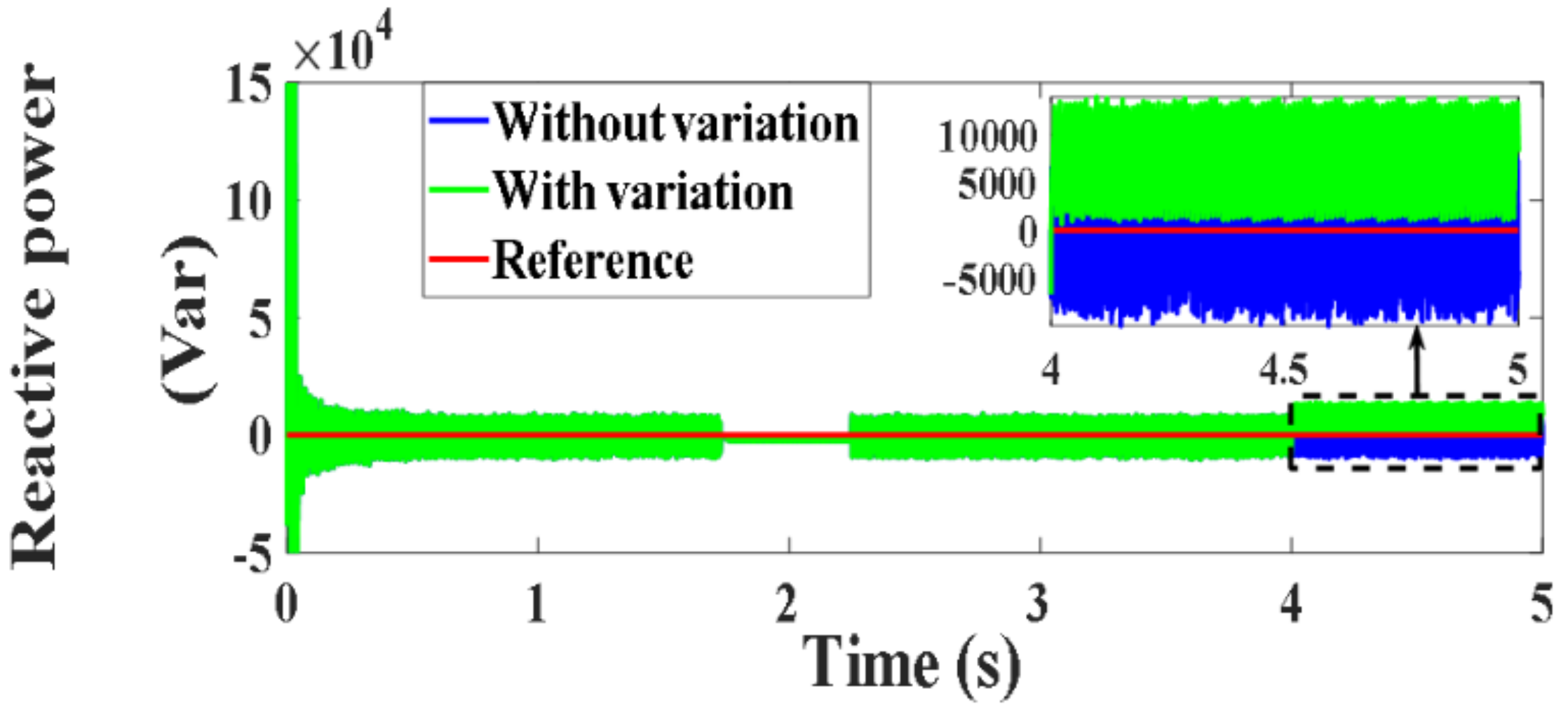
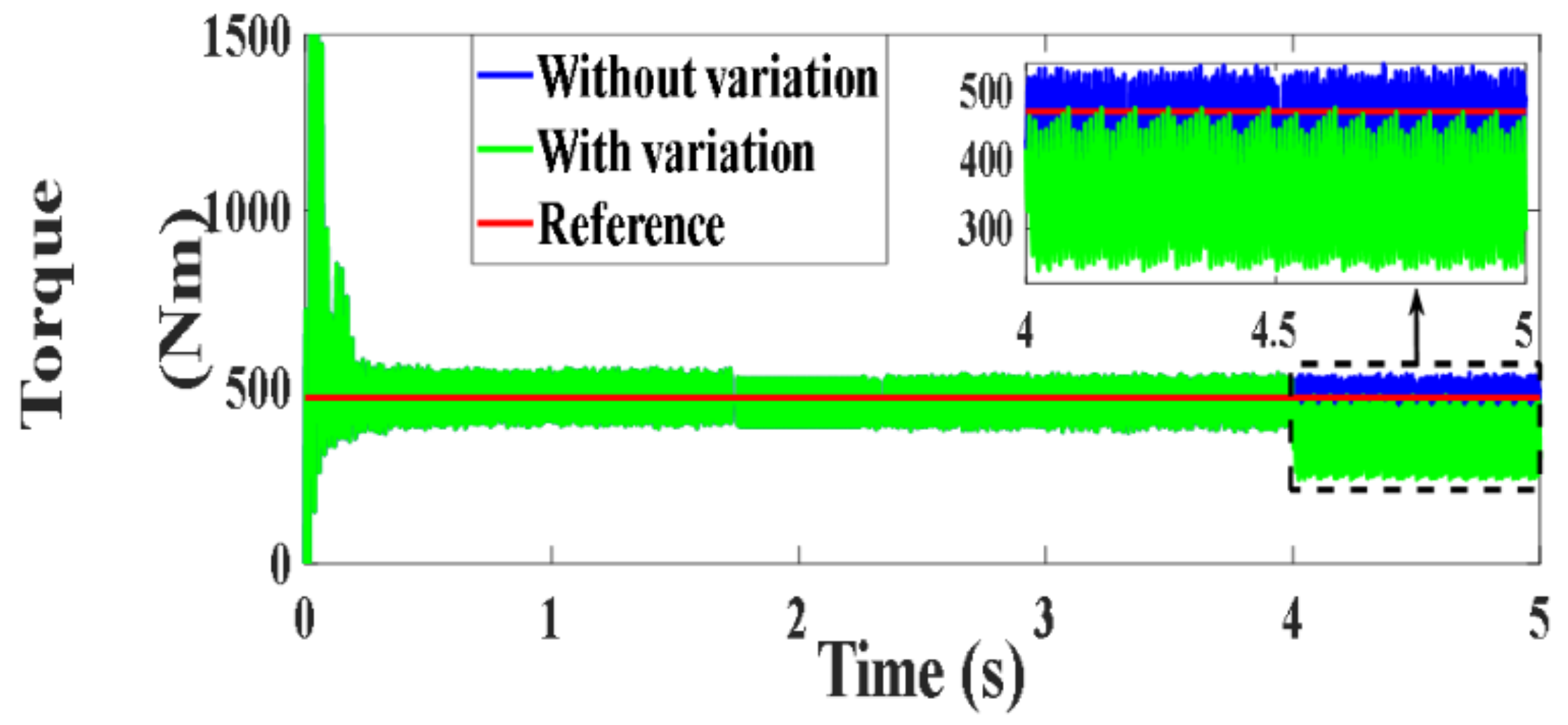
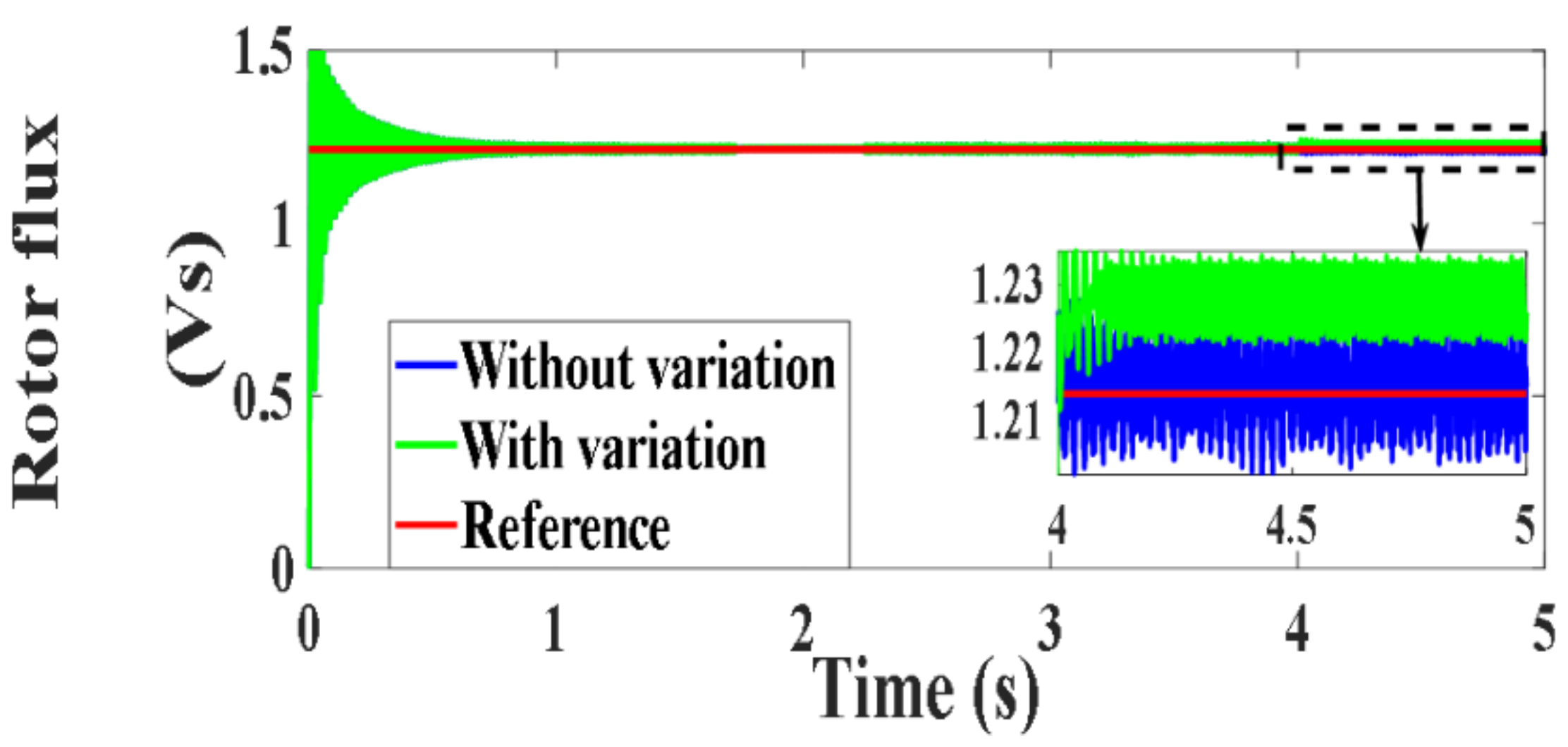
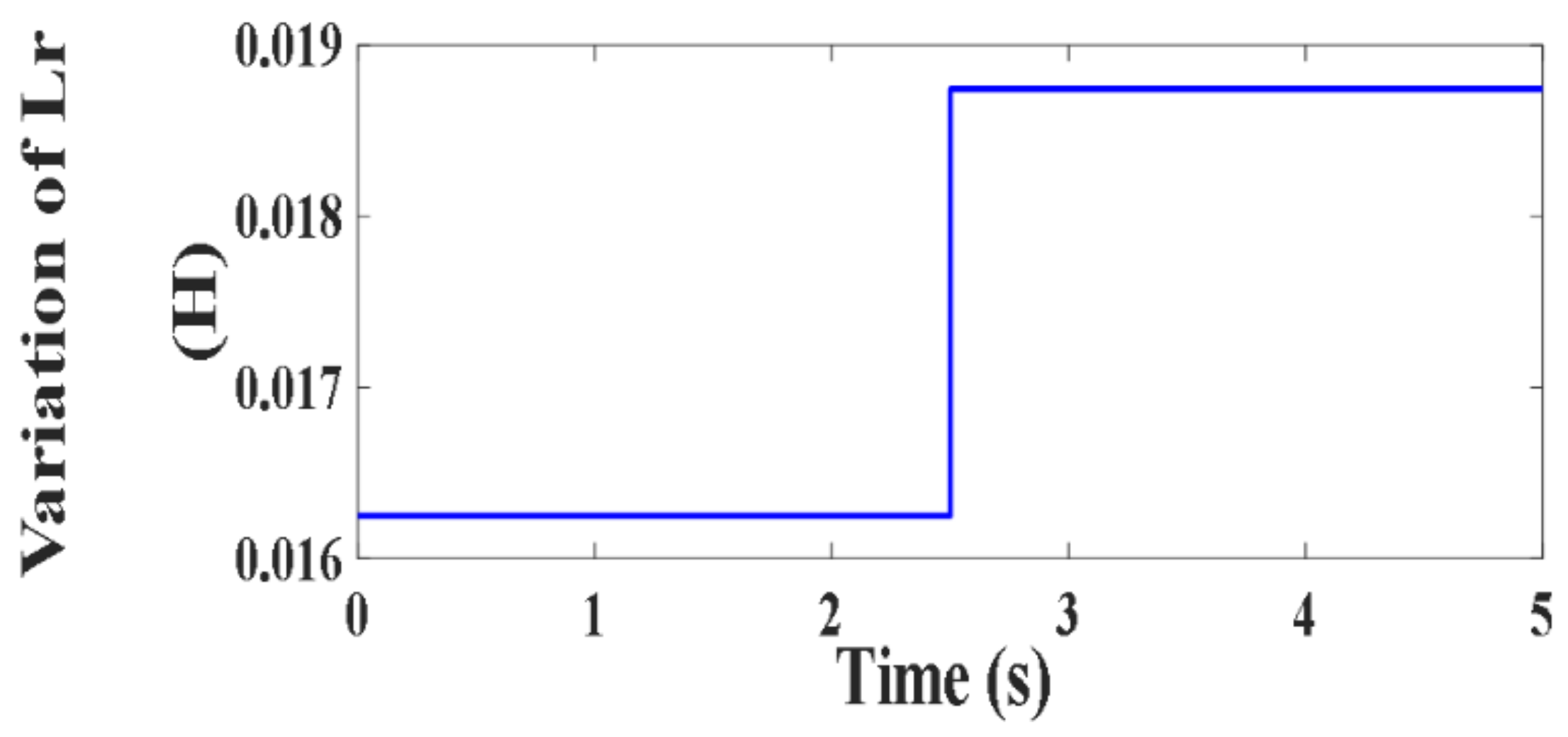
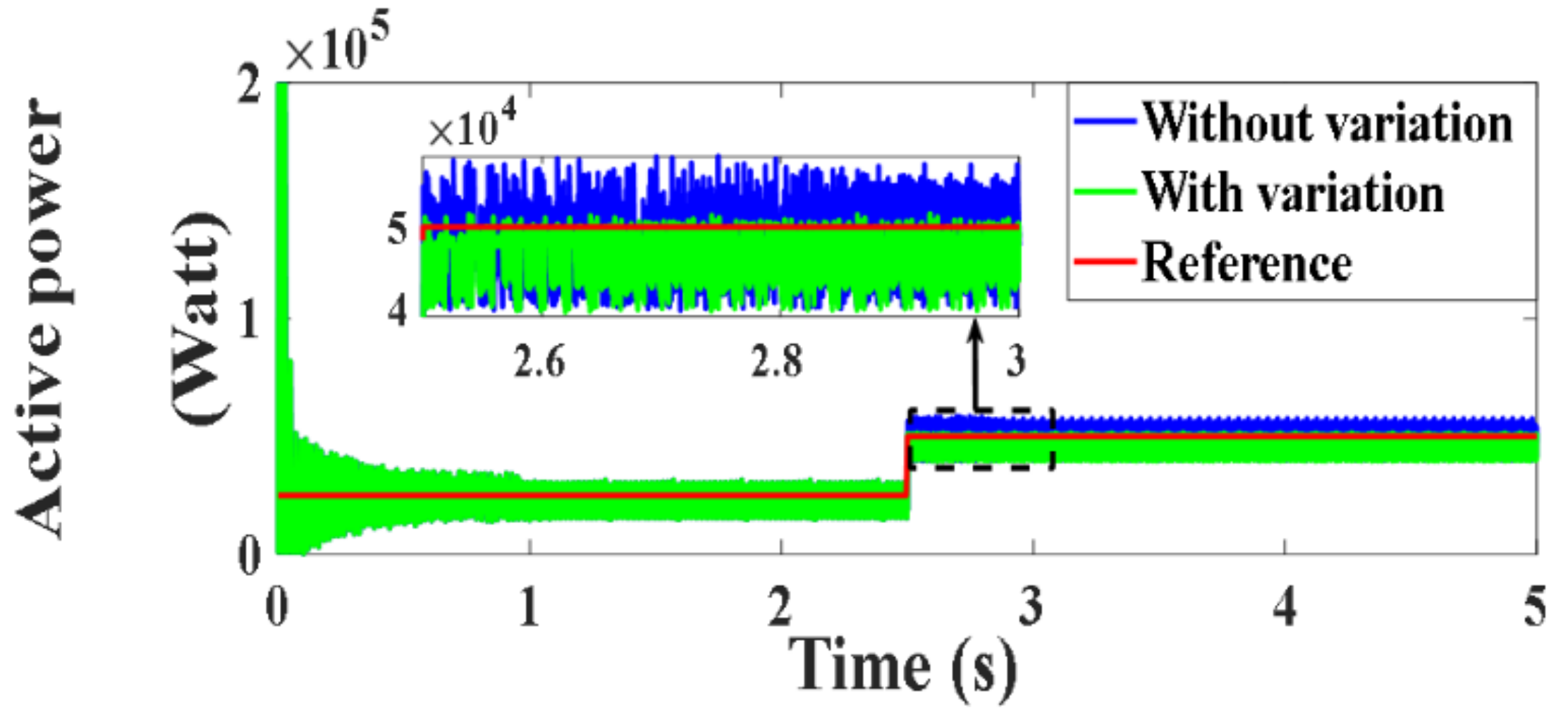
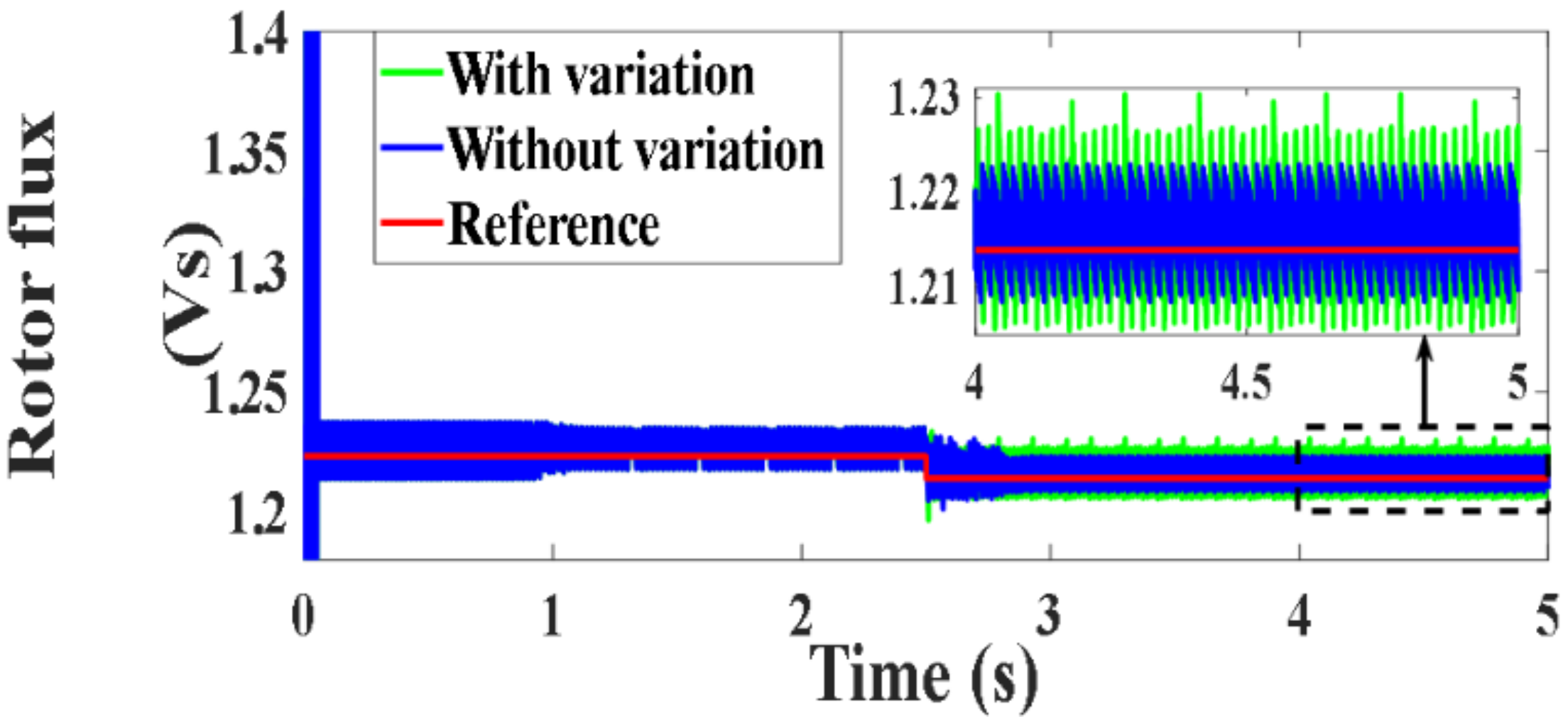
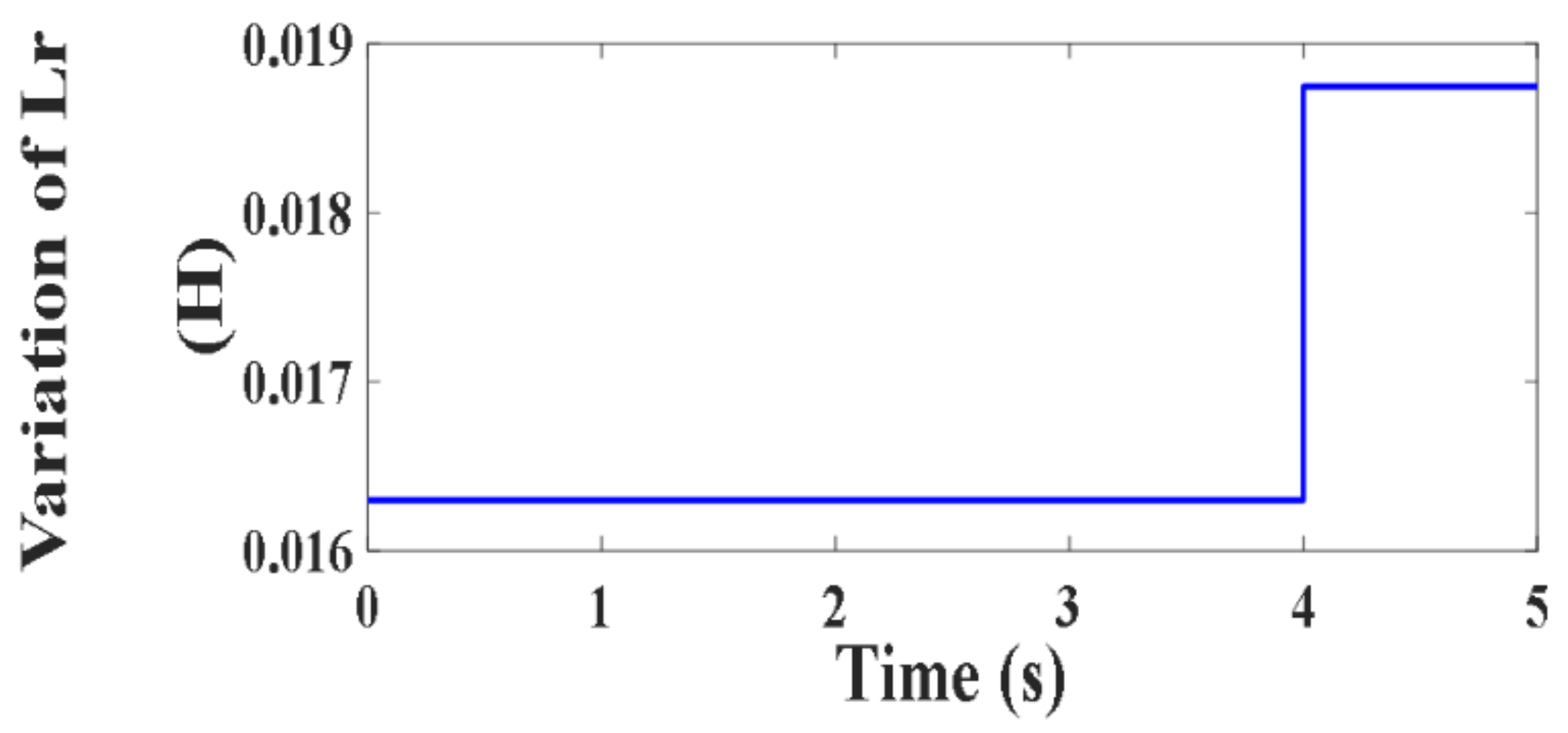
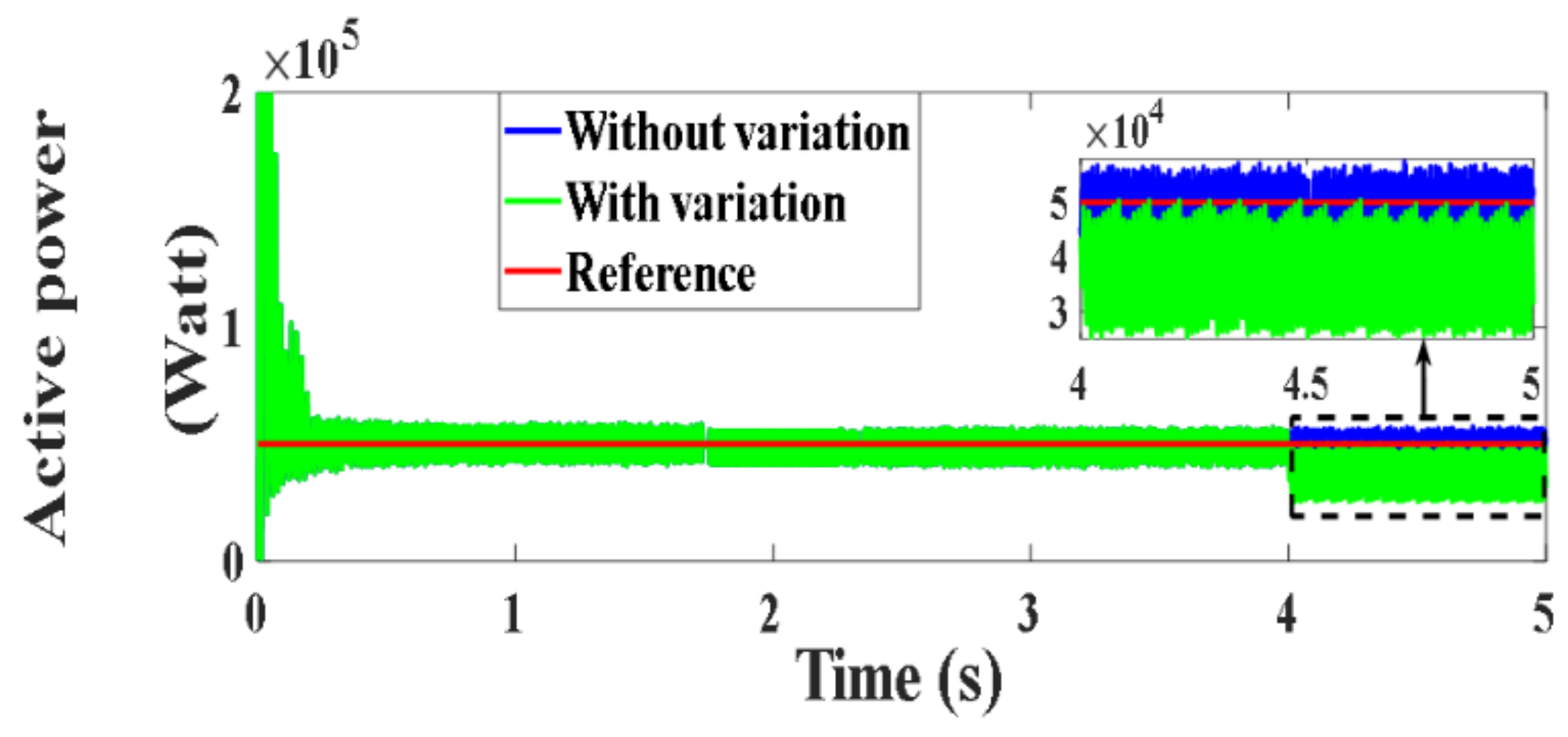
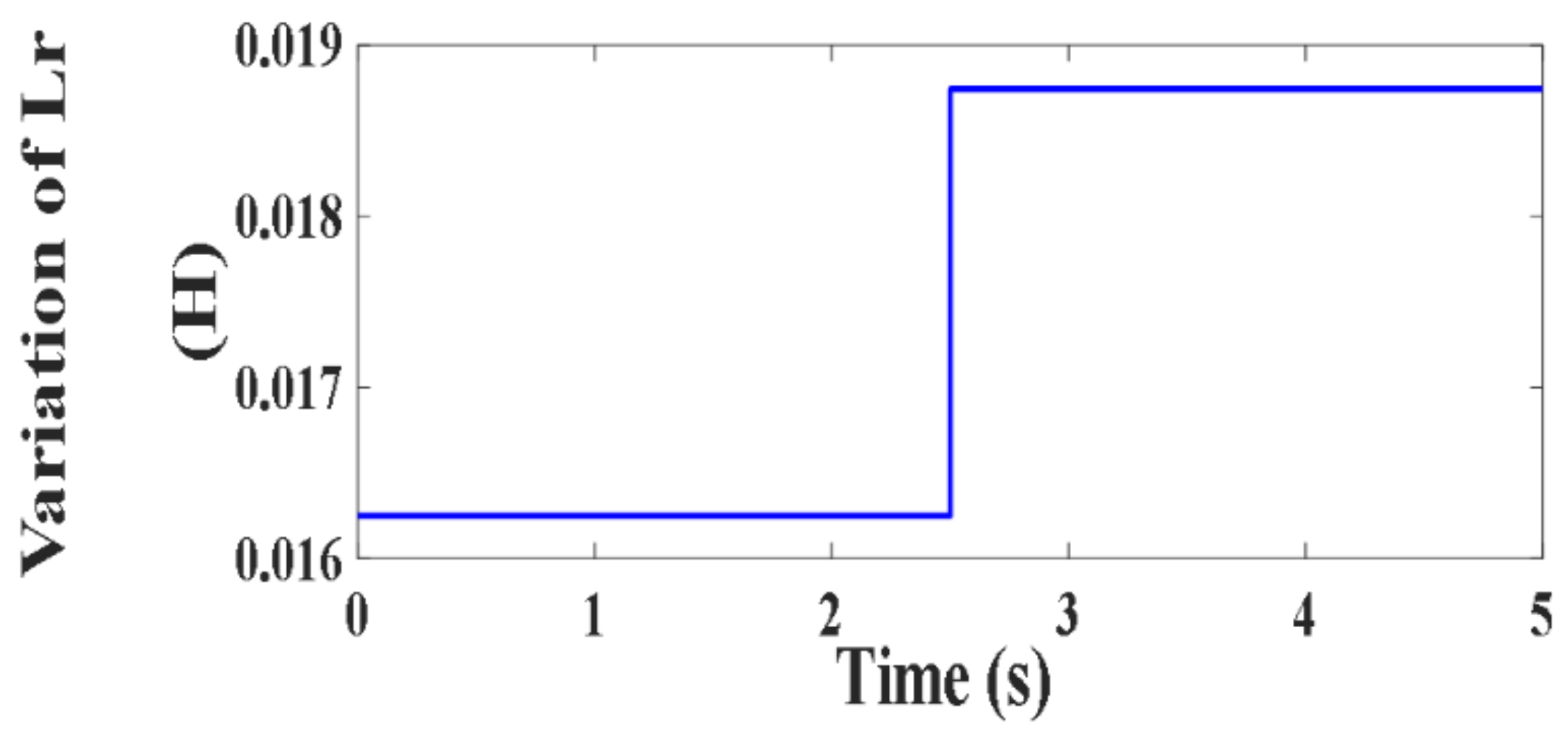
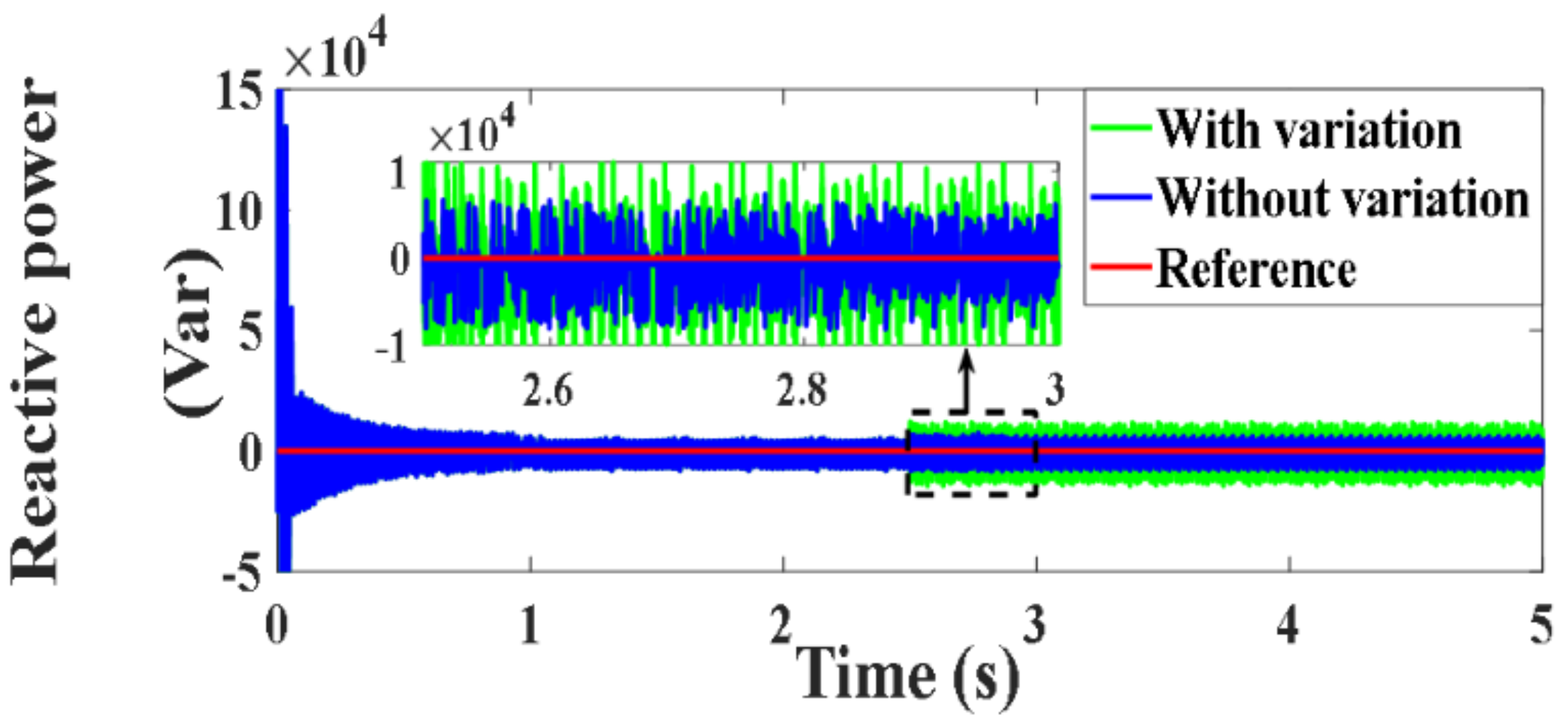
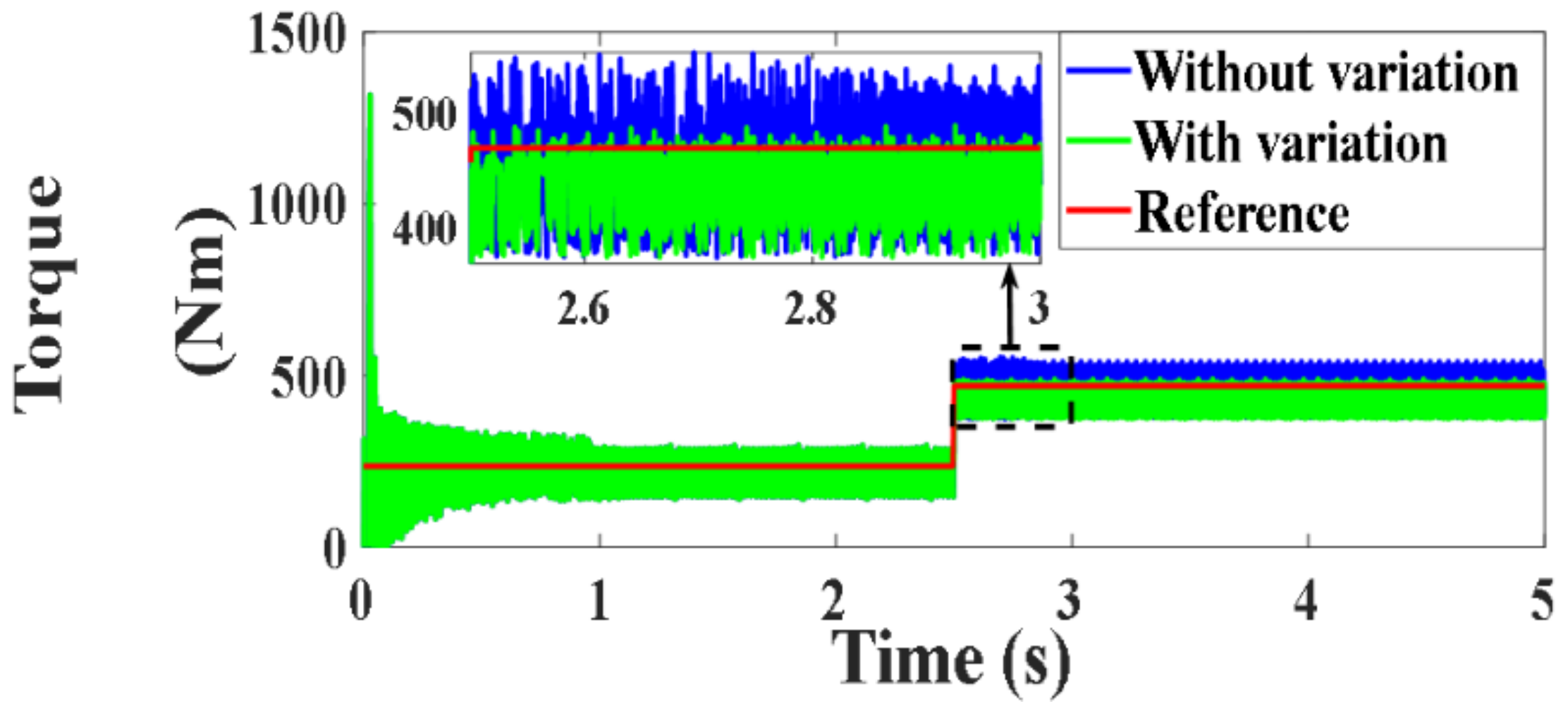
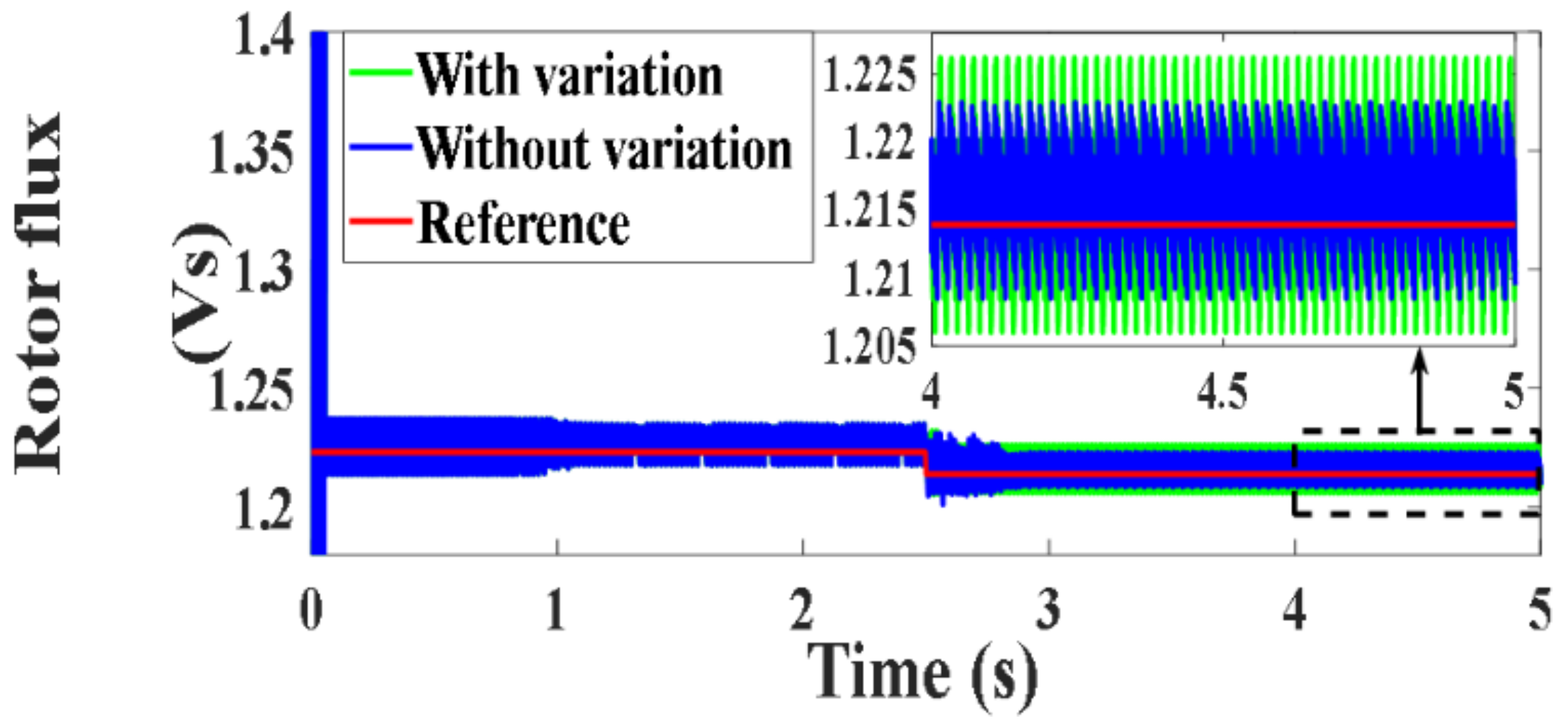
4.5.4. Testing under Proposed PVC with 15% Variation of Lr
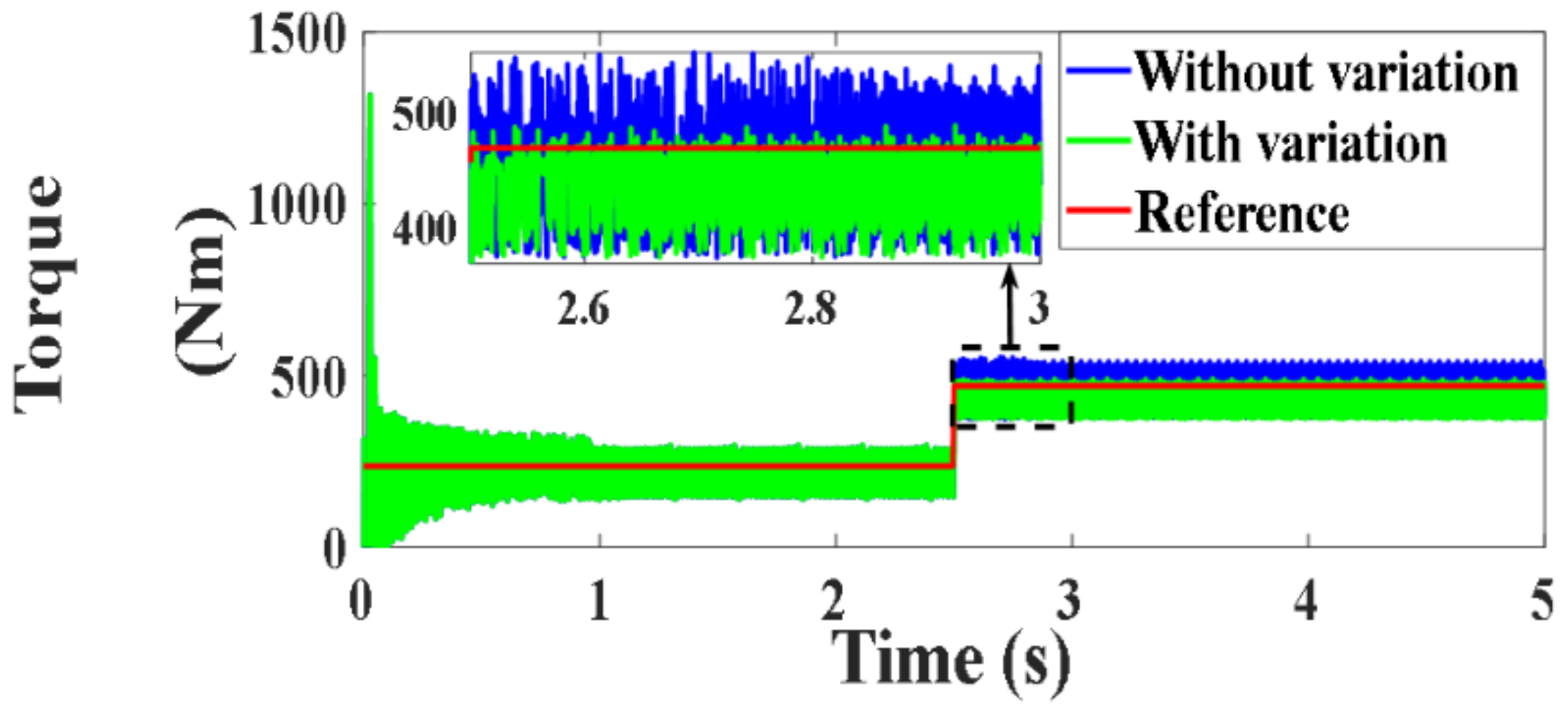
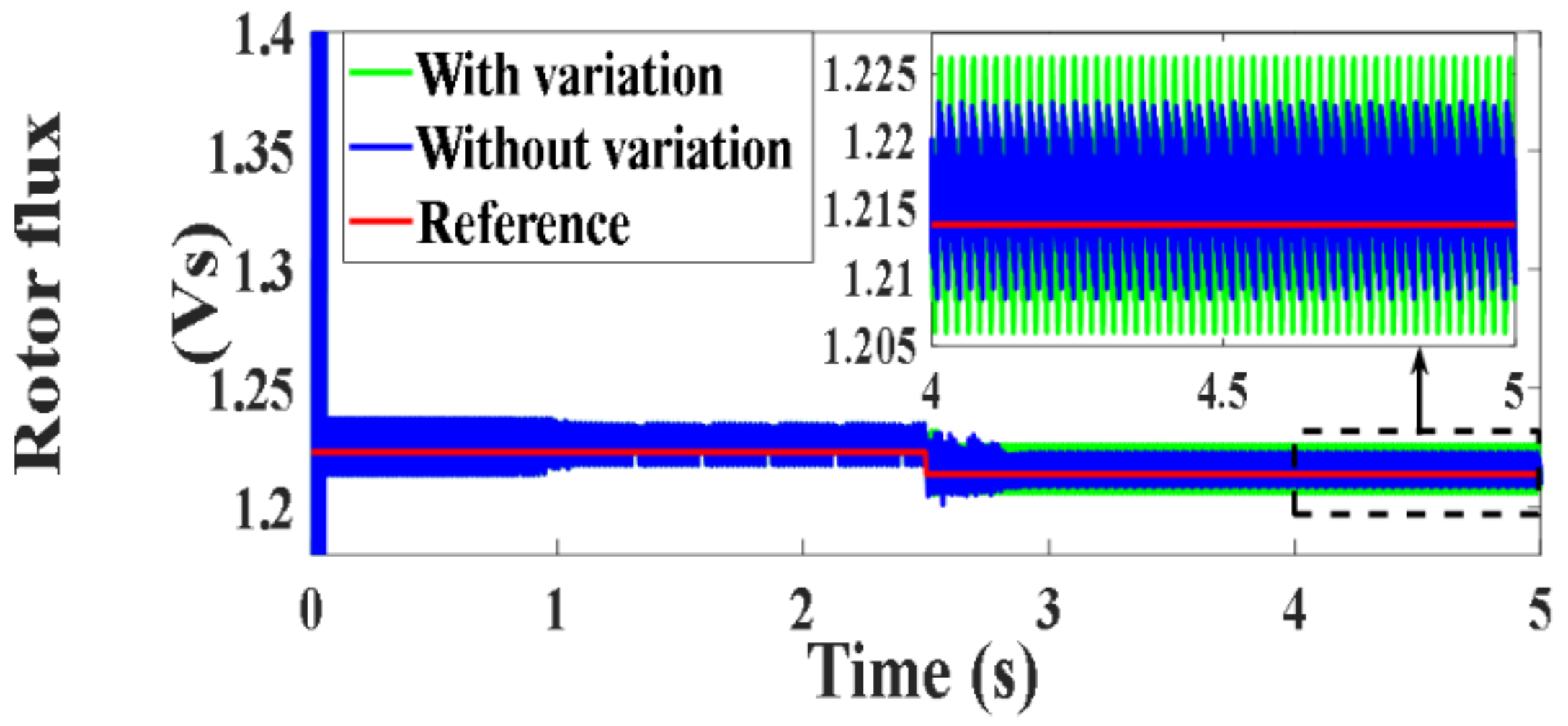
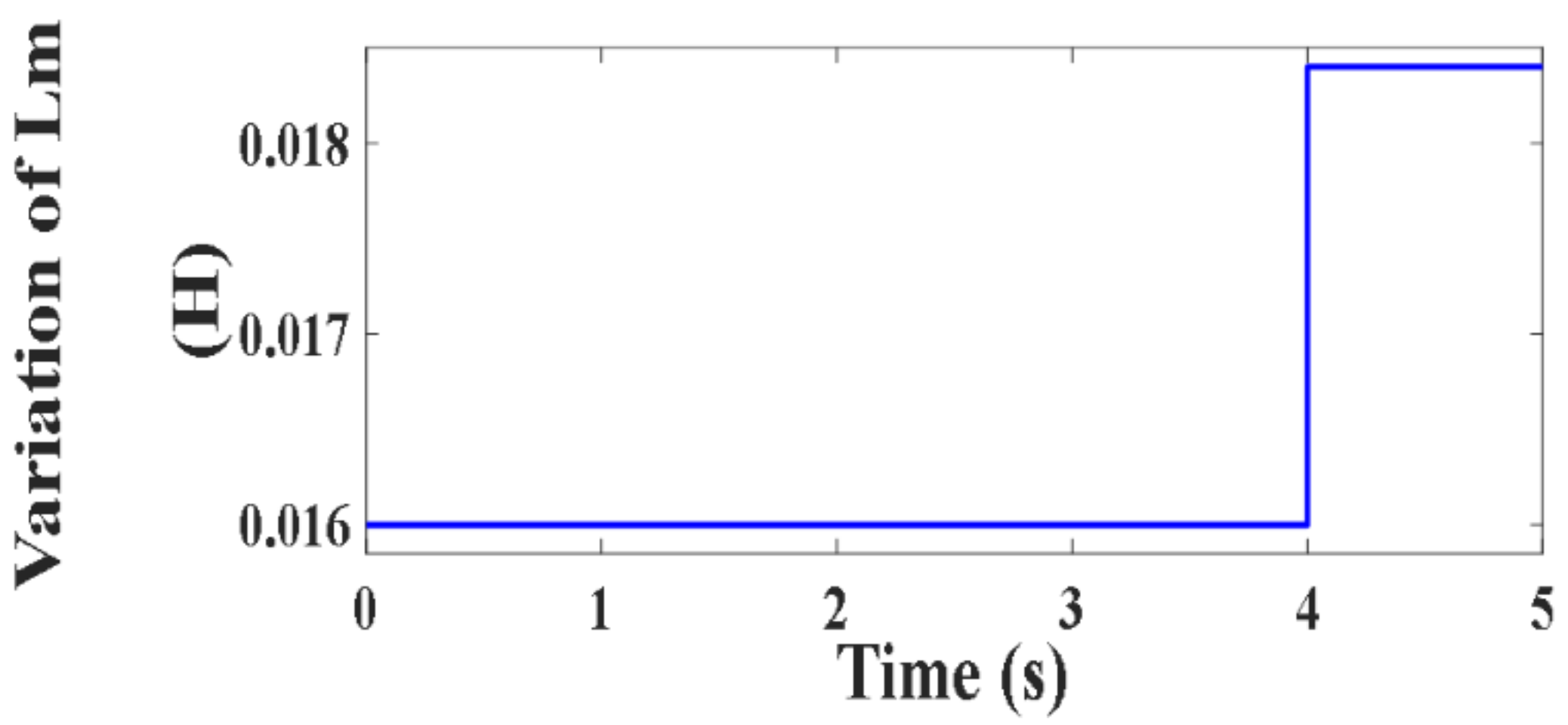
4.5.5. Testing under Proposed PVC with 15% Variation of Lm
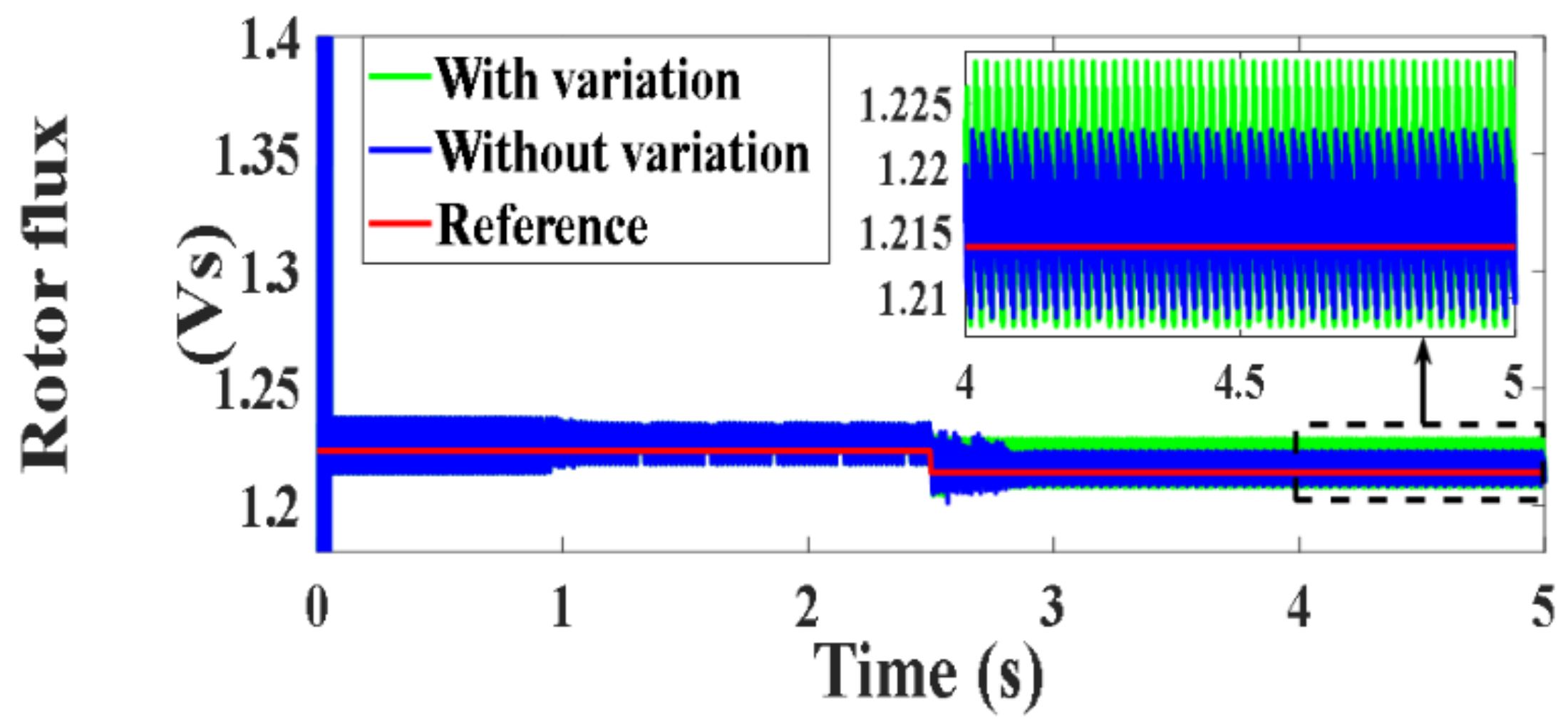
4.6. Testing Using Deadbeat Based Predictive Control (DBPC) Scheme with Parameter Variation
4.6.1. Testing the DBPC Scheme with 20% Variation of Rs
4.6.2. Testing the DBPC Scheme with 20% Variation of Rr
4.6.3. Testing the DBPC Scheme with 15% Variation of Ls
4.6.4. Testing the DBPC Scheme with 15% Variation of Lr
4.6.5. Testing the DBPC Scheme with 15% Variation of Lm
4.7. Comparison Study
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Rated power | 55 kW | Pole pairs (p) | 3 |
| Rs | 70 mΩ | Usn (nominal stator voltage) | 380 V |
| Rr | 87 mΩ | Kp and Ki (rotor current regulators) | 3 and 100 |
| Ls | 16.25 mH | Operating frequency | 50 Hz |
| Lr | 16.3 mH | Inertia of the DFIG | 0.1 kg·m2 |
| Lm | 16 mH | Sampling time | 10−4 s |
References
- Andrade, J.R.; Bessa, R.J. Improving Renewable Energy Forecasting with a Grid of Numerical Weather Predictions. IEEE Trans. Sustain. Energy 2017, 8, 1571–1580. [Google Scholar] [CrossRef] [Green Version]
- Siano, P.; Chen, P.; Chen, Z.; Piccolo, A. Evaluating maximum wind energy exploitation in active distribution networks. Gener. Transm. Distrib. IET 2010, 4, 598–608. [Google Scholar] [CrossRef] [Green Version]
- Tian, J.; Zhou, D.; Su, C.; Blaabjerg, F.; Chen, Z. Maximum energy yield oriented turbine control in PMSG-based wind farm. J. Eng. 2017, 2017, 2455–2460. [Google Scholar] [CrossRef]
- Vellaipatchi, N.; Kumaresan, N.; Gounden, N. A Single Sensor Based MPPT Controller for Wind-Driven Induction Generators Supplying DC Microgrid. IEEE Trans. Power Electron. 2015, 31, 1161–1172. [Google Scholar]
- Dambrosio, L.; Fortunato, B. One-step-ahead adaptive control of a wind-driven, synchronous generator system. Energy 1999, 24, 9–20. [Google Scholar] [CrossRef]
- Mahmoud, M.M.; Aly, M.M.; Salama, H.S.; Abdel-Rahim, A.-M.M. Dynamic evaluation of optimization techniques–based proportional–integral controller for wind-driven permanent magnet synchronous generator. Wind Eng. 2020, 45, 696–709. [Google Scholar] [CrossRef]
- Lopes, L.A.C.; Almeida, R.G. Wind-driven self-excited induction generator with voltage and frequency regulated by a reduced-rating voltage source inverter. IEEE Trans. Energy Convers. 2006, 21, 297–304. [Google Scholar] [CrossRef]
- Mossa, M.A.; Gam, O.; Bianchi, N. Dynamic Performance Enhancement of a Renewable Energy System for Grid Connection and Stand-alone Operation with Battery Storage. Energies 2022, 15, 1002. [Google Scholar] [CrossRef]
- Shaltout, A.A.; Abdel-Halim, M.A. Solid-State Control of a Wind-Driven Self-Excited Induction Generator. Electr. Mach. Power Syst. 1995, 23, 571–582. [Google Scholar] [CrossRef]
- Puchalapalli, S.; Tiwari, S.K.; Singh, B.; Goel, P.K. A Microgrid Based on Wind-DrivenDFIG, DG, and Solar PV Array for Optimal Fuel Consumption. IEEE Trans. Ind. Appl. 2020, 56, 4689–4699. [Google Scholar] [CrossRef]
- Mossa, M.A.; Bolognani, S. High performance Direct Power Control for a doubly fed induction generator. In Proceedings of the IECON 2016—42nd Annual Conference of the IEEE Industrial Electronics Society, Florence, Italy, 24–27 October 2016; pp. 1930–1935. [Google Scholar]
- Marques, G.D.; Iacchetti, M.F. DFIG Topologies for DC Networks: A Review on Control and Design Features. IEEE Trans. Power Electron. 2019, 34, 1299–1316. [Google Scholar] [CrossRef]
- Hassan, A.A.; El-Sawy, A.M.; Kamel, O.M. Direct Torque Control of a Doubly fed Induction Generator Driven by a Variable Speed Wind Turbine. JES J. Eng. Sci. 2013, 41, 199–216. [Google Scholar] [CrossRef]
- Charles, C.M.R.; Vinod, V.; Jacob, A. Field Oriented Control of DFIG Based Wind Energy System Using Battery Energy Storage System. Procedia Technol. 2016, 24, 1203–1210. [Google Scholar] [CrossRef] [Green Version]
- Pura, P.; Iwański, G. Rotor Current Feedback Based Direct Power Control of a Doubly Fed Induction Generator Operating with Unbalanced Grid. Energies 2021, 14, 3289. [Google Scholar] [CrossRef]
- Mahfoud, S.; Derouich, A.; EL Ouanjli, N.; EL Mahfoud, M.; Taoussi, M. A New Strategy-Based PID Controller Optimized by Genetic Algorithm for DTC of the Doubly Fed Induction Motor. Systems 2021, 9, 37. [Google Scholar] [CrossRef]
- Hassan, A.A.; Mohamed, Y.S.; El-Sawy, A.M.; Mossa, M.A. Control of a Wind Driven DFIG Connected to the Grid Based on Field Orientation. Wind Eng. 2011, 35, 127–143. [Google Scholar] [CrossRef]
- Amalorpavaraj, R.A.J.; Kaliannan, P.; Padmanaban, S.; Subramaniam, U.; Ramachandaramurthy, V.K. Improved Fault Ride Through Capability in DFIG Based Wind Turbines Using Dynamic Voltage Restorer with Combined Feed-Forward and Feed-Back Control. IEEE Access 2017, 5, 20494–20503. [Google Scholar] [CrossRef]
- Mossa, M.; Mohamed, Y. Novel Scheme for Improving the Performance of a Wind Driven Doubly Fed Induction Generator During Grid Fault. Wind Eng. 2012, 36, 305–334. [Google Scholar] [CrossRef]
- Huang, Q.; Zou, X.; Zhu, D.; Kang, Y. Scaled Current Tracking Control for Doubly Fed Induction Generator to Ride-Through Serious Grid Faults. in IEEE Trans. Power Electron. 2016, 31, 2150–2165. [Google Scholar] [CrossRef]
- Mossa, M.A.; Echeikh, H.; Diab, A.A.Z.; Quynh, N.V. Effective Direct Power Control for a Sensor-Less Doubly Fed Induction Generator with a Losses Minimization Criterion. Electronics 2020, 9, 1269. [Google Scholar] [CrossRef]
- Mossa, M.A.; Al-Sumaiti, A.S.; Do, T.D.; Diab, A.A.Z. Cost-Effective Predictive Flux Control for a Sensorless Doubly Fed Induction Generator. IEEE Access 2019, 7, 172606–172627. [Google Scholar] [CrossRef]
- Prasad, R.M.; Mulla, M.A. Mathematical Modeling and Position-Sensorless Algorithm for Stator-Side Field-Oriented Control of Rotor-Tied DFIG in Rotor Flux Reference Frame. IEEE Trans. Energy Convers. 2020, 35, 631–639. [Google Scholar] [CrossRef]
- Amrane, F.; Chaiba, A.; Francois, B.; Babes, B. Experimental design of stand-alone field oriented control for WECS in variable speed DFIG-based on hysteresis current controller. In Proceedings of the 15th International Conference on Electrical Machines, Drives and Power Systems (ELMA), Sofia, Bulgaria, 1–3 June 2017; pp. 304–308. [Google Scholar]
- Elmahfoud, M.; Bossoufi, B.; Taoussi, M.; Ouanjli, N.E.; Derouich, A. Rotor Field Oriented Control of Doubly Fed Induction Motor. In Proceedings of the 2019 5th International Conference on Optimization and Applications (ICOA), Kenitra, Morocco, 25–26 April 2019; pp. 1–6. [Google Scholar]
- Arbi, J.; Ghorbal, M.J.; Slama-Belkhodja, I.; Charaabi, L. Direct Virtual Torque Control for Doubly Fed Induction Generator Grid Connection. IEEE Trans. Ind. Electron. 2009, 56, 4163–4173. [Google Scholar] [CrossRef]
- Gundavarapu, A.; Misra, H.; Jain, A.K. Direct Torque Control Scheme for DC Voltage Regulation of the Standalone DFIG-DC System. IEEE Trans. Ind. Electron. 2017, 64, 3502–3512. [Google Scholar] [CrossRef]
- Kashkooli, M.R.A.; Madani, S.M.; Lipo, T.A. Improved Direct Torque Control for a DFIG under Symmetrical Voltage Dip With Transient Flux Damping. IEEE Trans. Ind. Electron. 2020, 67, 28–37. [Google Scholar] [CrossRef]
- El Daoudi, S.; Lazrak, L.; El Ouanjli, N.; Lafkih, M.A. Sensorless fuzzy direct torque control of induction motor with sliding mode speed controller. Comput. Electr. Eng. 2021, 96, 107490. [Google Scholar] [CrossRef]
- Rodrigues, L.L.; Vilcanqui, O.A.; Murari, A.L.; Filho, A.J. Predictive Power Control for DFIG: A FARE-Based Weighting Matrices Approach. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 967–975. [Google Scholar] [CrossRef]
- Mossa, M.A.; Bolognani, S. Robust Predictive Current Control for a Sensorless IM Drive Based on Torque Angle Regulation. In Proceedings of the 2019 IEEE Conference on Power Electronics and Renewable Energy (CPERE), Aswan City, Egypt, 23–25 October 2019; pp. 302–308. [Google Scholar]
- Filho, A.J.S.; Oliveira, A.L.d.; Rodrigues, L.L.; Costa, E.C.M.; Jacomini, R.V. A Robust Finite Control Set Applied to the DFIG Power Control. IEEE J. Emerg. Sel. Top. Power Electron. 2018, 6, 1692–1698. [Google Scholar] [CrossRef]
- Bektache, A.; Boukhezzar, B. Nonlinear predictive control of a DFIG-based wind turbine for power capture optimization. Int. J. Electr. Power Energy Syst. 2018, 101, 92–102. [Google Scholar] [CrossRef]
- Cheng, C.; Nian, H. Low-Complexity Model Predictive Stator Current Control of DFIG Under Harmonic Grid Voltages. IEEE Trans. Energy Convers. 2017, 32, 1072–1080. [Google Scholar] [CrossRef]
- Mossa, M.A.; Kamel, O.M.; Bolognani, S. Explicit Predictive Voltage Control for an Induction Motor Drive. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 258–264. [Google Scholar]
- Bonfiglio, A.; Cantoni, F.; Oliveri, A.; Procopio, R.; Rosini, A.; Invernizzi, M.; Storace, M. An MPC-Based Approach for Emergency Control Ensuring Transient Stability in Power Grids With Steam Plants. IEEE Trans. Ind. Electron. 2019, 66, 5412–5422. [Google Scholar] [CrossRef]
- Morstyn, T.; Hredzak, B.; Aguilera, R.P.; Agelidis, V.G. Model Predictive Control for Distributed Microgrid Battery Energy Storage Systems. IEEE Trans. Control Syst. Technol. 2018, 26, 1107–1114. [Google Scholar] [CrossRef] [Green Version]
- Kou, P.; Liang, D.; Li, J.; Gao, L.; Ze, Q. Finite-Control-Set Model Predictive Control for DFIG Wind Turbines. IEEE Trans. Autom. Sci. Eng. 2018, 15, 1004–1013. [Google Scholar] [CrossRef]
- Zanelli, A.; Kullick, J.; Eldeeb, H.M.; Frison, G.; Hackl, C.M.; Diehl, M. Continuous Control Set Nonlinear Model Predictive Control of Reluctance Synchronous Machines. IEEE Trans. Control. Syst. Technol. 2021, 30, 130–141. [Google Scholar] [CrossRef]
- Petkar, S.; Thippiripati, V.K. Enhanced Predictive Current Control of PMSM Drive with Virtual Voltage Space Vectors. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021. [Google Scholar] [CrossRef]
- Liu, M.; Chan, K.W.; Hu, J.; Xu, W.; Rodriguez, J. Model Predictive Direct Speed Control With Torque Oscillation Reduction for PMSM Drives. IEEE Trans. Ind. Inform. 2019, 15, 4944–4956. [Google Scholar] [CrossRef]
- Mokhtari, M.; Davari, S.A. Predictive torque control of DFIG with torque ripple reduction. In Proceedings of the 2016 IEEE International Conference on Power and Energy (PECon), Melaka, Malaysia, 28–29 November 2016; pp. 763–768. [Google Scholar]
- Zhang, Y.; Zhu, J.; Hu, J. Model predictive direct torque control for grid synchronization of doubly fed induction generator. In Proceedings of the 2011 IEEE International Electric Machines & Drives Conference (IEMDC), Niagara Falls, ON, Canada, 15–18 May 2011; pp. 765–770. [Google Scholar]
- Mossa, M.A.; Bolognani, S. Effective sensorless model predictive direct torque control for a doubly fed induction machine. In Proceedings of the 2017 IEEE Nineteenth International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 19–21 December 2017; pp. 1201–1207. [Google Scholar]
- Wei, X.; Cheng, M.; Zhu, J.; Yang, H.; Luo, R. Finite-Set Model Predictive Power Control of Brushless Doubly Fed Twin Stator Induction Generator. IEEE Trans. Power Electron. 2019, 34, 2300–2311. [Google Scholar] [CrossRef]
- Vayeghan, M.M.; Davari, S.A. Torque ripple reduction of DFIG by a new and robust predictive torque control method. IET Renew. Power Gener. 2017, 11, 1345–1352. [Google Scholar] [CrossRef]
- Zhang, Y.; Jiao, J.; Xu, D.; Jiang, D.; Wang, Z.; Tong, C. Model Predictive Direct Power Control of Doubly Fed Induction Generators Under Balanced and Unbalanced Network Conditions. IEEE Trans. Ind. Appl. 2020, 56, 771–786. [Google Scholar] [CrossRef]
- Zarei, M.E.; Nicolás, C.V.; Arribas, J.R. Improved Predictive Direct Power Control of Doubly Fed Induction Generator During Unbalanced Grid Voltage Based on Four Vectors. IEEE J. Emerg. Sel. Top. Power Electron. 2017, 5, 695–707. [Google Scholar] [CrossRef]
- Davari, S.A.; Nekoukar, V.; Garcia, C.; Rodriguez, J. Online Weighting Factor Optimization by Simplified Simulated Annealing for Finite Set Predictive Control. IEEE Trans. Ind. Inform. 2021, 17, 31–40. [Google Scholar] [CrossRef]
- Mossa, M.A.; Bolognani, S. Effective model predictive current control for a sensorless IM drive. In Proceedings of the 2017 IEEE International Symposium on Sensorless Control for Electrical Drives (SLED), Catania, Italy, 18–19 September 2017; pp. 37–42. [Google Scholar]
- Bozorgi, A.M.; Farasat, M.; Jafarishiadeh, S. Model predictive current control of surface-mounted permanent magnet synchronous motor with low torque and current ripple. IET Power Electron. 2017, 10, 1120–1128. [Google Scholar] [CrossRef]
- Mossa, M.A.; Bolognani, S. Predictive Power Control for a Linearized Doubly Fed Induction Generator Model. In Proceedings of the 2019 21st International Middle East Power Systems Conference (MEPCON), Cairo, Egypt, 17–19 December 2019; pp. 250–257. [Google Scholar]
- Mossa, M.A.; Bolognani, S. A novel sensorless direct torque control for a doubly fed induction machine. In Proceedings of the 2016 XXII International Conference on Electrical Machines (ICEM), Lausanne, Switzerland, 4–7 September 2016; pp. 942–948. [Google Scholar]
- Mossa, M.A. Field Orientation Control of a Wind Driven DFIG Connected to the Grid. Wseas Trans. Power Syst. 2012, 4, 182–197. [Google Scholar]
- Zhang, Y.; Xu, D. Direct power control of doubly fed induction generator based on extended power theory under unbalanced grid condition. In Proceedings of the 2017 IEEE 3rd International Future Energy Electronics Conference and ECCE Asia (IFEEC 2017—ECCE Asia), Kaohsiung, Taiwan, 4–7 June 2017; pp. 992–996. [Google Scholar]
- Osorio, C.M.R.; Chaves, J.S.S.; Murari, A.L.L.F.; Filho, A.J.S. Comparative Analysis of the Doubly Fed Induction Generator (DFIG) Under Balanced Voltage Sag Using a Deadbeat Controller. IEEE Lat. Am. Trans. 2017, 15, 869–876. [Google Scholar] [CrossRef]
- Franco, R.; Capovilla, C.E.; Jacomini, R.V.; Altana, J.A.T.; Filho, A.J.S. A deadbeat direct power control applied to doubly-fed induction aerogenerator under normal and sag voltages conditions. In Proceedings of the IECON 2014—40th Annual Conference of the IEEE Industrial Electronics Society, Dallas, TX, USA, 29 October–1 November 2014; pp. 1906–1911. [Google Scholar]
- Mossa, M.A.; Do, T.D.; Al-Sumaiti, A.S.; Quynh, N.V.; Diab, A.A.Z. Effective Model Predictive Voltage Control for a Sensorless Doubly Fed Induction Generator. IEEE Can. J. Electr. Comput. Eng. 2021, 44, 50–64. [Google Scholar] [CrossRef]









































































| Technique | Time Taken by Active Power Profile | Time Taken by Torque Profile | Time Taken by Rotor Flux Profile |
|---|---|---|---|
| SVOC | 0.55 ms | 0.65 ms | 6.5 ms |
| MPCC | 0.16065 ms | 0.156 ms | 2.4 ms |
| MPDTC | 0.1604 ms | 0.151 ms | 0.14 ms |
| PVC | 0.14 ms | 0.135 ms | 0.057 ms |
| Technique | Ripples of Active Power (Watt) | Ripples of Reactive Power (var) | Ripples of Developed Torque (Nm) | Ripples of Rotor Flux (Vs) | ||||
|---|---|---|---|---|---|---|---|---|
| Case 1 | Case 2 | Case 1 | Case 2 | Case 1 | Case 2 | Case 1 | Case 2 | |
| SVOC | 740 | 670 | 274 | 281 | 9.2 | 9.9 | 0.012 | 0.013 |
| MPCC | 7040 | 7580 | 7865 | 7673 | 171.1 | 183.4 | 0.023 | 0.02 |
| MPDTC | 7890 | 8140 | 10080 | 9846 | 193.3 | 185 | 0.024 | 0.022 |
| PVC | 2980 | 3070 | 4043 | 3804 | 85 | 104.1 | 0.016 | 0.014 |
| Technique | Variable Speed Operation | Fixed Speed Operation |
|---|---|---|
| MPCC | 8830 | 3732 |
| MPDTC | 8588 | 2461 |
| PVC | 7057 | 1409 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mossa, M.A.; Abdelhamid, M.K.; Hassan, A.A.; Bianchi, N. Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System. Processes 2022, 10, 456. https://doi.org/10.3390/pr10030456
Mossa MA, Abdelhamid MK, Hassan AA, Bianchi N. Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System. Processes. 2022; 10(3):456. https://doi.org/10.3390/pr10030456
Chicago/Turabian StyleMossa, Mahmoud A., Mahmoud K. Abdelhamid, Ahmed A. Hassan, and Nicola Bianchi. 2022. "Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System" Processes 10, no. 3: 456. https://doi.org/10.3390/pr10030456
APA StyleMossa, M. A., Abdelhamid, M. K., Hassan, A. A., & Bianchi, N. (2022). Improving the Dynamic Performance of a Variable Speed DFIG for Energy Conversion Purposes Using an Effective Control System. Processes, 10(3), 456. https://doi.org/10.3390/pr10030456