


Robust Intelligent Tracking Control Technique for Single-Phase SPWM Inverters




Abstract
1. Introduction
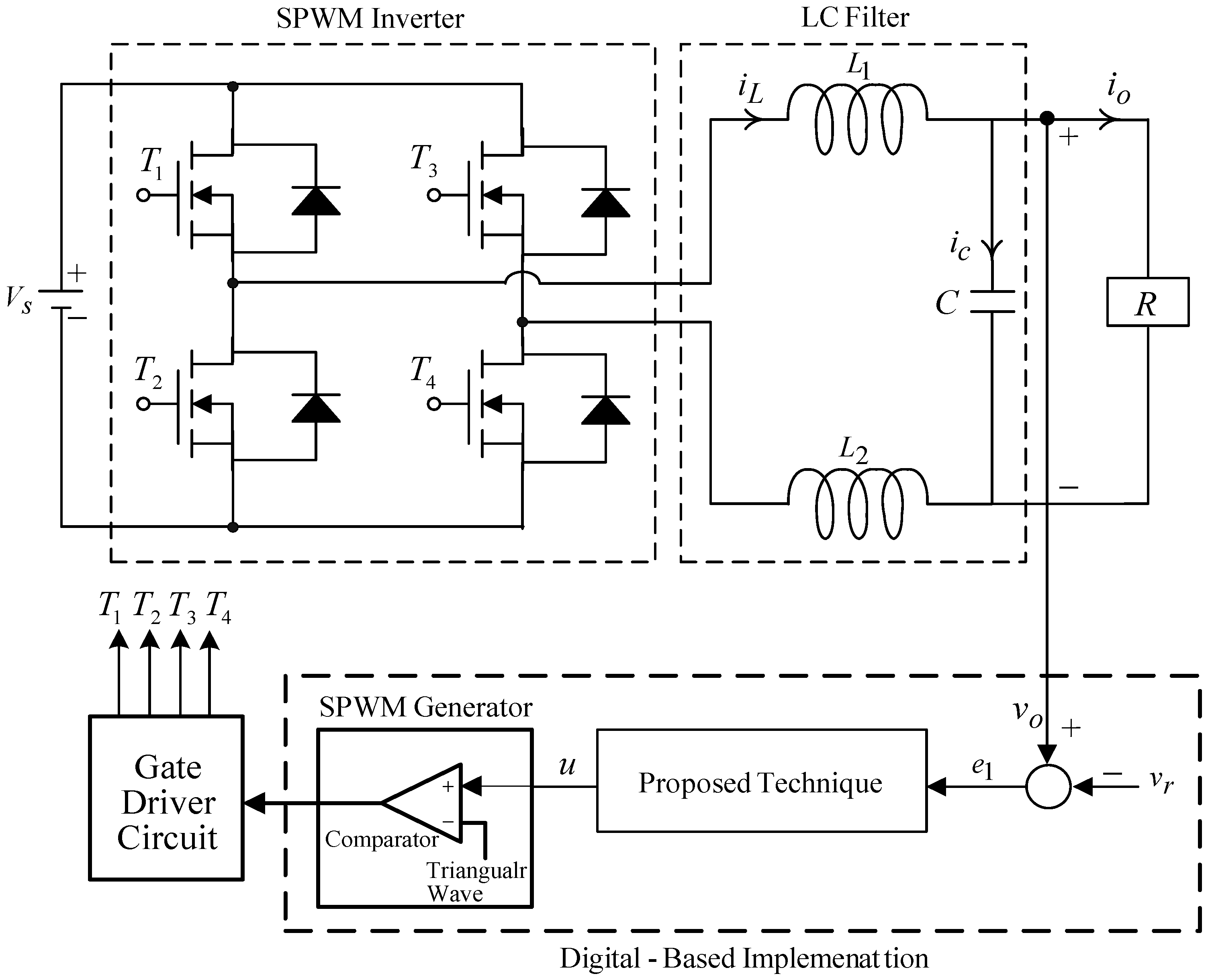
2. Modeling of Single-Phase SPWM Inverter
3. Design of Control Technique
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Batarseh, I.; Harb, A. Power Electronics: Circuit Analysis and Design; Springer International Publishing: New York, NY, USA, 2018. [Google Scholar]
- Mohanty, P.; Muneer, T.; Tariq, K.; Mohan, L. Solar Photovoltaic System Applications; Springer: New York, NY, USA, 2015. [Google Scholar]
- Branko, L.D.; Branko, B. Power Electronics: Converters and Regulators; Springer: New York, NY, USA, 2015. [Google Scholar]
- Mahmoud, M.S. Microgrid: Advanced Control Methods and Renewable Energy System Integration; Elsevier Science Ltd.: Amsterdam, The Netherlands, 2016. [Google Scholar]
- Chen, T.F.; Dutta, O.; Ramasubramanian, D.; Farantatos, E. An LQR-based Robust Voltage Controller for Grid Forming Inverters during Blackstart. In Proceedings of the 2021 IEEE PES Innovative Smart Grid Technologies–Asia (ISGT Asia), Brisbane, Australia, 5–8 December 2021; pp. 1–5. [Google Scholar]
- Kanathipan, K.; Lam, J. An Electrolytic Capacitor-Less PV Micro-Inverter Based on CLL Resonant Conversion with a Power Control Scheme Using Resonant Circuit Voltage Control Loops. CPSS Trans. Power Electron. Appl. 2022, 7, 139–149. [Google Scholar] [CrossRef]
- Krüner, S.; Song, Z.; Hackl, C.M. 3D-Modulation and PI State-Feedback Control of Voltage Source Inverters with Split DC-Link. In Proceedings of the 2021 IEEE 30th International Symposium on Industrial Electronics (ISIE), Kyoto, Japan, 20–23 June 2021; pp. 1–7. [Google Scholar]
- Vadi, S.; Bayindir, R. Modeling, Analysis and Proportional Resonant and Proportional Integral Based Control Strategy for Single Phase Quasi-Z Source Inverters. IEEE Access 2022, 10, 87217–87226. [Google Scholar] [CrossRef]
- Yildiran, N.; Tacer, E. A New Approach to H-Infinity Control for Grid-Connected Inverters in Photovoltaic Generation Systems. Electr. Power Compon. Syst. 2019, 47, 1413–1422. [Google Scholar] [CrossRef]
- Azar, A.T.; Zhu, Q.M. Advances and Applications in Sliding Mode Control Systems; Springer: New York, NY, USA, 2015. [Google Scholar]
- Wu, L.G.; Shi, P.; Su, X.J. Sliding Mode Control of Uncertain Parameter-Switching Hybrid Systems; Wiley: Chichester, UK, 2014. [Google Scholar]
- Utkin, V.I. Variable Structure Systems with Sliding Modes. IEEE Trans. Autom. Control 1977, AC-22, 212–222. [Google Scholar] [CrossRef]
- Vaidyanathan, S.; Lien, C.H. Applications of Sliding Mode Control in Science and Engineering; Springer: New York, NY, USA, 2017. [Google Scholar]
- Chinnappan, R.; Logamani, P.; Ramasubbu, R. Fixed Frequency Integral Sliding-Mmode Current-Controlled MPPT Boost Converter for Two-Stage PV Generation System. IET Circuits Devices Syst. 2019, 13, 793–805. [Google Scholar] [CrossRef]
- Banerjee, B.; Weaver, W.W. Generalized Geometric Control Manifolds of Power Converters in a DC Microgrid. IEEE Trans. Energy Convers. 2014, 29, 904–912. [Google Scholar] [CrossRef]
- Feshara, H.F.; Ibrahim, A.M.; El-Amary, N.H.; Sharaf, S.M. Performance Evaluation of Variable Structure Controller Based on Sliding Mode Technique for a Grid-Connected Solar Network. IEEE Access 2019, 7, 84349–84359. [Google Scholar] [CrossRef]
- Hao, X.; Yang, X.; Liu, T.; Huang, L.; Chen, W.J. A Sliding-Mode Controller with Multiresonant Sliding Surface for Single-Phase Grid-Connected VSI with an LCL Filter. IEEE Trans. Power Electron. 2013, 28, 2259–2268. [Google Scholar] [CrossRef]
- Abrishamifar, A.; Ahmad, A.A.; Mohamadian, M. Fixed Switching Frequency Sliding Mode Control for Single-Phase Unipolar Inverters. IEEE Trans. Power Electron. 2012, 27, 2507–2514. [Google Scholar] [CrossRef]
- Komurcugil, H. Rotating-Sliding-Line-Based Sliding-Mode Control for Single-Phase UPS Inverters. IEEE Trans. Ind. Electron. 2012, 59, 3719–3726. [Google Scholar] [CrossRef]
- Aghatehrani, R.; Kavasseri, R. Sensitivity-Analysis-Based Sliding Mode Control for Voltage Regulation in Microgrids. IEEE Trans. Sustain. Energy 2013, 4, 50–57. [Google Scholar] [CrossRef]
- Janardhanan, S.; Bandyopadhyay, B. On Discretization of Continuous-Time Terminal Sliding Mode. IEEE Trans. Autom. Control 2006, 51, 1532–1536. [Google Scholar] [CrossRef]
- Galias, Z.; Yu, X.H. Dynamical Behaviors of Discretized Second-Order Terminal Sliding-Mode Control Systems. IEEE Trans. Circuits Syst. II Express Briefs 2013, 59, 597–601. [Google Scholar] [CrossRef]
- Abidi, K.; Xu, J.X.; She, J.H. A Discrete-Time Terminal Sliding-Mode Control Approach Applied to a Motion Control Problem. IEEE Trans. Ind. Electron. 2009, 56, 3619–3627. [Google Scholar] [CrossRef]
- Zhao, Y.X.; Wu, T.; Ma, Y. A Double Power Reaching Law of Sliding Mode Control Based on Neural Network. Math. Probl. Eng. 2013, 2013, 1–9. [Google Scholar] [CrossRef]
- Wang, H.P.; Zhao, X.K.; Tian, Y. Trajectory Tracking Control of XY Table Using Sliding Mode Adaptive Control Based on Fast Double Power Reaching Law. Asian J. Control 2016, 18, 2263–2271. [Google Scholar] [CrossRef]
- Dong, C.Y.; Wang, H.J.; Cui, W.Y. Application of the Sliding Mode Control Approach Based on Double Power Exponential Reaching Law for the Hydraulic Servo System. Appl. Mech. Mater. 2015, 741, 655–658. [Google Scholar] [CrossRef]
- Han, Y.X.; Cheng, Y.; Xu, G.W. Trajectory Tracking Control of AGV Based on Sliding Mode Control with the Improved Reaching Law. IEEE Access 2019, 7, 20748–20755. [Google Scholar] [CrossRef]
- Andrzej, B.; Paweł, L. A Generalization of Gao’s Reaching Law for Higher Relative Degree Sliding Variables. IEEE Trans. Autom. Control 2018, 63, 3173–3179. [Google Scholar]
- Peltoniemi, P.; Nuutinen, P.; Pyrhonen, J. Observer-based output voltage control for DC power distribution purposes. IEEE Trans. Power Electron. 2013, 28, 1914–1926. [Google Scholar] [CrossRef]
- Lin, S.Y.; Zhang, W.D.; Wang, H. Controller Designed via an Adaptive Reaching Law for DSMC Systems. IEEE Trans. Circuits Syst. II Express Briefs 2020, 62, 330–334. [Google Scholar] [CrossRef]
- Wu, X.B.; Liu, Q.; Zhao, M.L.; Chen, M.Y. Monolithic Quasi-Sliding-Mode Controller for SIDO Buck Converter with a Self-Adaptive Free-Wheeling Current Level. J. Semicond. 2013, 34, 1–7. [Google Scholar] [CrossRef]
- Xu, G.R.; Teng, Q.F.; Zheng, X.W.; Ma, X.P. An Adaptive Backstepping Sliding Mode Control Strategy for Single-phase Grid-Connected Inverter System under Weak Grid. In Proceedings of the 2021 China Automation Congress (CAC), Beijing, China, 22–24 October 2021; pp. 5684–5689. [Google Scholar]
- Liu, S.; Lin, Y. Grey Information: Theory and Practical Applications; Springer: London, UK, 2006. [Google Scholar]
- Deng, J.L. Introduction to Grey System Theory. J. Grey System. 1989, 1, 1–24. [Google Scholar]
- Li, Q.X.; Lin, Y. Review paper: A Briefing to Grey Systems Theory. J. Syst. Sci. Inf. 2014, 2, 178–192. [Google Scholar] [CrossRef]
- Sun, X.; Sun, W.; Wang, J.; Gao, Y. Using a Grey-Markov Model Optimized by Cuckoo Search Algorithm to Forecast the Annual Foreign Tourist Arrivals to China. Tour. Manag. 2016, 52, 369–379. [Google Scholar] [CrossRef]
- Mao, Z.L.; Sun, J.H. Application of Grey-Markov model in forecasting fire accidents. Procedia Eng. 2011, 11, 314–318. [Google Scholar]
- Chen, X.; Fang, P.; Chen, F.L.; Wang, S. The Grey Markov Chain Model Based on Sliding Window in Vertical Steering Locus Forecasting for Shearers. In Proceedings of the 2019 International Conference on Advances in Construction Machinery and Vehicle Engineering (ICACMVE), Changsha, China, 14–16 May 2019; pp. 426–429. [Google Scholar]
- Lehman, B.; Bass, R.M. Extension of averaging theory for power electronic systems. IEEE Trans. Power Electron. 1996, 11, 542–553. [Google Scholar] [CrossRef]
- Middlebrook, R.D. Small-signal modeling of pulse-width modulated switched mode power converters. Proc. IEEE 1988, 76, 343–354. [Google Scholar] [CrossRef]
- Mahdavi, J.; Emaadi, S.; Ehsani, M. Analysis of power electronic converters using the generalized state-space averaging approach. IEEE Trans. Circuits Syst. I Fundam. Theory Appl. 1997, 44, 767–770. [Google Scholar] [CrossRef]
- Callegaro, L.; Pagano, D.J.; Ciobotaru, M.; Fletcher, J.E. Feedback linearization control of non-inverting buck-boost PV power optimizers. In Proceedings of the 2017 IEEE 8th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Florianopolis, Brazil, 17–20 April 2017; pp. 1–6. [Google Scholar]
- Ogudo, K.A.; Umenne, P. Design of a PV Based Power Supply with a NonInverting Buck-Boost Converter. In Proceedings of the 2019 IEEE PES/IAS PowerAfrica, Abuja, Nigeria, 20–23 August 2019; pp. 545–549. [Google Scholar]
- Mishra, T. Synthesis and Modelling of A Novel Multi-Input Multi-Output System Topology Implemented on Non-Inverting Buck-Boost Converter for Renewable Energy Applications. In Proceedings of the 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–6. [Google Scholar]
- Callegaro, L.; Ciobotaru, M.; Pagano, D.J.; Turano, E.; Fletcher, J.E. A Simple Smooth Transition Technique for the Noninverting Buck–Boost Converter. IEEE Trans. Power Electron. 2018, 33, 4906–4915. [Google Scholar] [CrossRef]
- Boutebba, O.; Semcheddine, S.; Krim, F.; Corti, F.; Reatti, A.; Grasso, F. A Nonlinear Back-stepping Controller of DC-DC Non Inverting Buck-Boost Converter for Maximizing Photovoltaic Power Extraction. In Proceedings of the 2020 IEEE International Conference on Environment and Electrical Engineering and 2020 IEEE Industrial and Commercial Power Systems Europe (EEEIC/I&CPS Europe), Madrid, Spain, 9–12 June 2020; pp. 1–6. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| DC supply voltage () | 200 V |
| Sine output voltage () | Vmax |
| Frequency of sine output voltage | 60 Hz |
| Filter inductor () | 1 mH |
| Filter capacitor ( | 20 Microfarad |
| Resistive load () | 12 Ohm |
| Switching frequency | 30 kHz |
| Methods | Testing Conditions | Values |
|---|---|---|
| Conventional SMC (Simulations) | Full resistive load (%THD) | 0.02% |
| Stepped load (Voltage droop) | 50.79 Vmax | |
| LC parametric variation (%THD) | 21.43% | |
| Proposed Technique (Simulations) | Full resistive load (%THD) | 0.01% |
| Stepped load (Voltage droop) | 16.83 Vmax | |
| LC parametric variation (%THD) | 0.09% | |
| Conventional SMC (Experiments) | Full resistive load (%THD) | 0.03% |
| Stepped load (Voltage droop) | 50.46 Vmax | |
| LC parametric variation (%THD) | 19.76% | |
| Proposed Technique (Experiments) | Full resistive load (%THD) | 0.04% |
| Stepped load (Voltage droop) | 21.17 Vmax | |
| LC parametric variation (%THD) | 0.08% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chang, E.-C.; Wu, R.-C.; Chang, H.H.; Cheng, C.-A. Robust Intelligent Tracking Control Technique for Single-Phase SPWM Inverters. Processes 2023, 11, 13. https://doi.org/10.3390/pr11010013
Chang E-C, Wu R-C, Chang HH, Cheng C-A. Robust Intelligent Tracking Control Technique for Single-Phase SPWM Inverters. Processes. 2023; 11(1):13. https://doi.org/10.3390/pr11010013
Chicago/Turabian StyleChang, En-Chih, Rong-Ching Wu, Heidi H. Chang, and Chun-An Cheng. 2023. "Robust Intelligent Tracking Control Technique for Single-Phase SPWM Inverters" Processes 11, no. 1: 13. https://doi.org/10.3390/pr11010013
APA StyleChang, E.-C., Wu, R.-C., Chang, H. H., & Cheng, C.-A. (2023). Robust Intelligent Tracking Control Technique for Single-Phase SPWM Inverters. Processes, 11(1), 13. https://doi.org/10.3390/pr11010013