1. Introduction
In a design problem posed as a multi-objective optimization, there is not a single solution. Therefore, the designer—decision maker (DM in what follows)—must get, from the set of optimal solutions—Pareto set—, a suitable solution adjusted to a given set of preferences. It is accepted that the preferences of the designer might play a fundamental role in the resolution of this type of problems [
1,
2,
3,
4]. Using preference handling mechanisms in the optimization process has shown to be a valuable tool when facing multi-objective optimization problems [
5]. These mechanisms also facilitate the decision-making process at the selection step, because the DM will focus its attention to the pertinent region of the Pareto front [
6]. Nevertheless, this implies that it is necessary to have tools that allow to take into account the preferences in any of the phases of resolution of a design problem that is intended to be solved through multi-objective optimization. Thus, preferences of the DM affect the definition of the objectives, the optimization to reach an approximation to the Pareto set, and/or the selection of the final solution. There are already some papers that explain how to bring some progress in all these steps but most of them are mainly focused to incorporating preferences in the optimization problem. For example, there are some works on how to build functions to optimize according preferences [
7]. Mechanisms for
pertinency have also been included in some multi-objective optimization algorithms [
2,
6,
8,
9,
10] in which the preferences guide the approach to the front. Reference [
11] proposes a new angle-based preference selection mechanism to be included in the optimization algorithm. Reference [
12] investigates two methods to find simultaneously optimal (in the objective space) and practically desirable solutions (in the decision space). Reference [
13] incorporates preference information into evolutionary multi-objective optimization in an interactive way, at each iteration, the decision maker has to include preference information (as points corresponding to aspiration levels for objectives). Reference [
2] introduces a new preference relation based on a reference point approach that is used into an interactive optimization scheme that uses a multi-objective evolutionary algorithm (MOEA). Reference [
14] integrates preferences in the optimization process by a nonuniform mapping of the objective space according to an aspiration level vector, and some other parameters (number of divisions, expected extend of the region of interest, etc.) supplied by the DM. A recent work [
15] proposes a modification of a decomposition-based multi-objective evolutionary algorithm to obtain a denser set of solution closer to a reference point.
Most of the works found in the bibliography try to provide new developments applicable in the final decision phase or throughout the optimization via interactive mechanisms. Another large group of proposals tries to modify the optimization algorithm to incorporate preferences in the optimization process itself. The proposal described here is based on modifying the original problem to incorporate preferences without having to modify the optimization algorithm. That is there is no need to incorporate any additional mechanism or layer in the algorithm. In this paper, we show a very simple way to incorporate preferences in the objective definition phase. It allows the use of any current optimization algorithm without special requirements, being compatible with any advance made in the multi-objective optimization algorithm. Additionally, it is shown how to use this same methodology in the final decision phase helping in the visualization of the preferred solutions. This is applicable in case of problems in which the Pareto front has been obtained without taking into account the preferences, and it is necessary to incorporate them in the final decision stage.
The adaptation of the original problem to include preferences usually also depends on the problem itself. It involves the adaptation or design of functions to be optimized that reflect the preferences. A widely used way is to transform the multi-objective problem into a single-objective problem by means of scalarization [
16]. A classic method widely used is the weighted sum of the objectives where it is necessary to adjust weighting factors that, in some way, incorporate the preferences of the designer. The idea of this work is somewhat similar; it consists of modifying the functions to be optimized but maintaining the multi-objective character, that is, without turning it into a single-objective function. Technically, we use what we call preference directions, that are introduced by choosing a special basis for the space of objectives
. Broadly speaking, the elements of such a basis represent the directions in the space in which the DM feels that the optimization must be realized. Associated to these preference directions, a new basis, called dominance basis, is obtained. Their elements are defined as intersection of hyperplanes which are orthogonal to the preference directions. From the geometrical point of view, the cone generated by the dominance basis provides a representation of the dominance cone. Thus, the corresponding change of basis allows a reinterpretation of the classical dominance relationship that is used for defining the Pareto front, that represents the solution of a multi-objective optimization problem. The underlying idea is very simple and consists of the fact that the change of base produces a deformation of the objective space in a way that favors the preferences of the DM. The definition of these bases is beyond the scope of this paper, and it is problem dependent: it is assumed that the DM has established such preference directions using his own criteria. Nevertheless, for the aim of illustrating this notion, we will shown how to obtain it in some particular examples.
The paper is organized as follows.
Section 2 introduces the main concepts involved in the proposal. In
Section 3, we show how to use preference and dominance bases to reformulate the multi-objective problem and also to help in the decision-making step.
Section 4 shows an application example, and the last
Section 5 summarizes the main conclusion and future works.
2. Preference Directions and Dominance
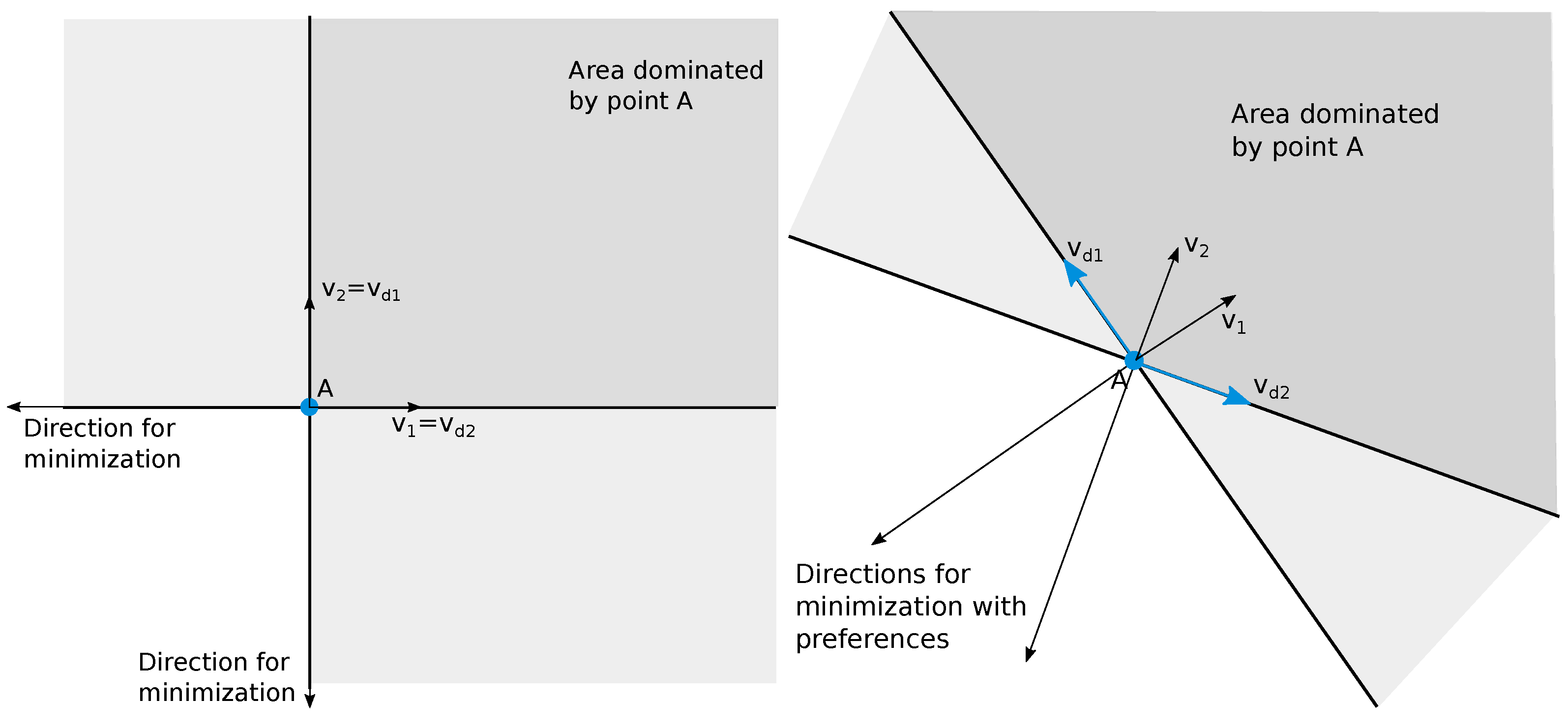
The way proposed to introduce preferences in the geometric space is by means of the space basis of : (preference basis). We will call the vectors of such basis preference directions. Our main idea is that these vectors model the preferred directions for minimization. In other words, each hyperplane that is orthogonal to a vector in this basis separates the points of the space into two sets: the points “below” the hyperplane dominate—with respect to this preference direction—the points “above” the hyperplane.
Thus, associated with , a new basis of can be defined by using a geometric procedure that will be explained later on (see Proposition 1). We will call it the dominance basis. The positive cone (dominance cone see Definition 1) generated by , and also associated with , allows to reinterpret dominance according to the new preference directions provided. Recall that the notion of dominance depends on the lattice order that is considered in the Euclidean space. The usual order in is given by the “coordinates" ordering, when these coordinates correspond to the canonical basis in the Euclidean n-dimensional space. If we consider the coordinate order with respect to a different basis of —in our case, —, we obtain a different dominance relation among points. Our main contributions in the present paper are: (1) to show how to obtain the dominance basis from the preference basis; and (2) how to use it in the multi-objective optimization problem.
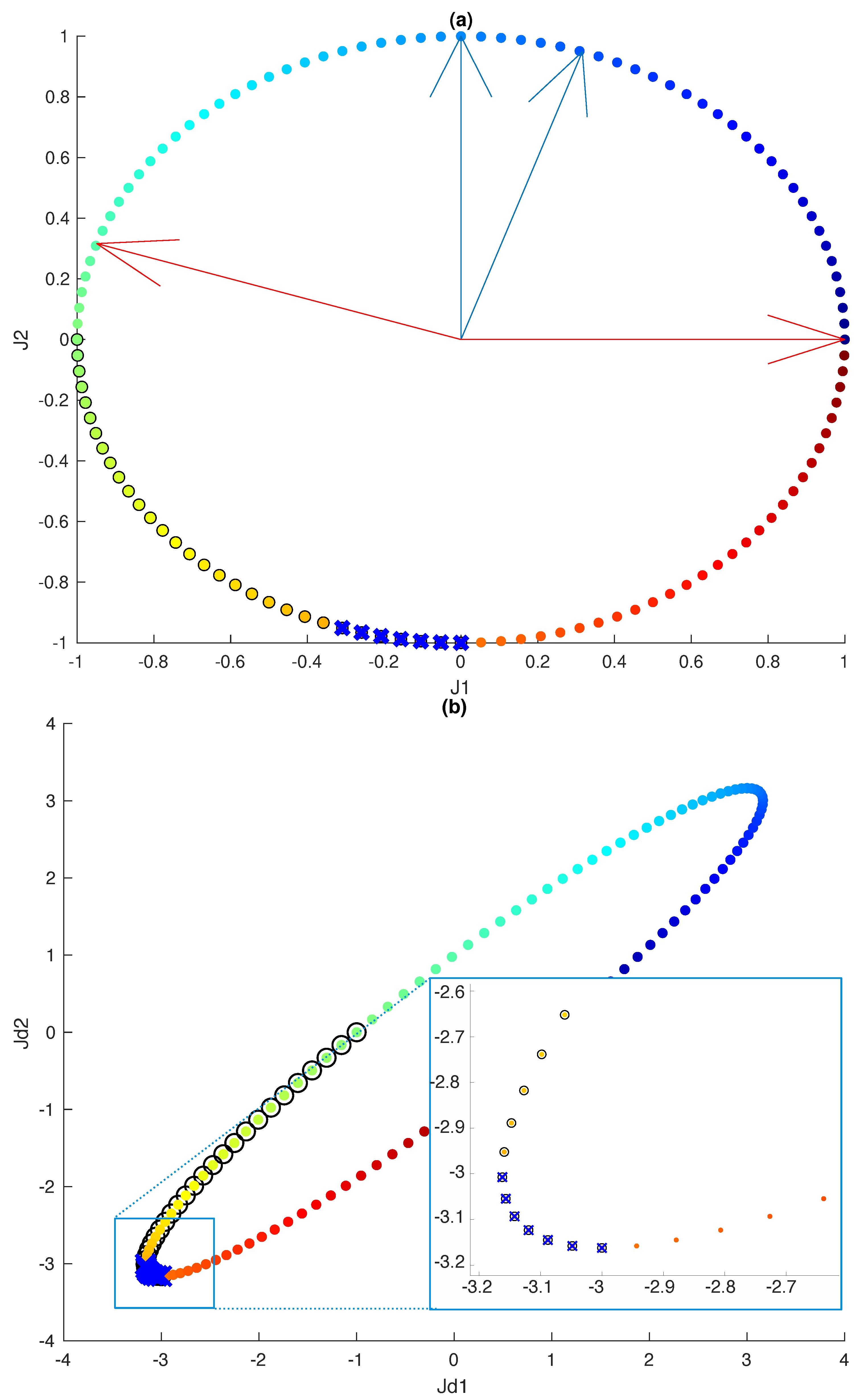
Figure 1 shows an example of the reinterpretation of dominance for a 2-objective space. The figure shows the canonical interpretation of dominance and how the dominance area changes when a different basis of preference directions is considered. Note that the effect of considering the dominance defined by the cone generated by
can be understood as a deformation of the area that is dominated by a given point. Remark that, if the canonical base is set as the preference basis, the dominance basis is also the canonical basis (dominance and preference basis are the same). In the next subsection, we will provide the equations to obtain the dominance basis
from the preference directions basis.
Computation of Dominance Basis
Let
be the
n-dimensional Euclidean space. Consider a basis
norm one elements of
included in the positive cone of
. Each of the elements of the basis defines what we have called a preference direction for the optimization. The optimization procedure that we present here proposes to consider the associated dominance cone as the set of all vectors that are over the hyperplane defined by each vector defining a preference direction (its projection on this vector must be positive). Therefore, we define the
positive semispace associated with the preference direction
as
Consequently, the dominance cone can be defined as follows.
Definition 1. Let be a basis of preference directions of We define the dominance cone as the intersection of all the semispaces that is: The positive cone
generated by
allows to reinterpret dominance according to the new preference directions: if
A is a point in
gives the set of all the points that are dominated by
A. In
Figure 1, a 2D example is given, where the dark grey area shows the area dominated by point
A, that is,
.
Definition 2. Given a set of vectors we define its positive linear hull as the set For the subsequent proposals described in
Section 3.2, it is necessary to obtain the dominance basis
corresponding to the preference basis
defined by the DM. A way to obtain
is based on the equivalence of
and
(see Proposition 1). As we already mentioned, the dominance basis is defined by vectors that are orthogonal to vectors of the preference basis.
Proposition 1. The dominance cone associated with a basis of preference directions coincides with the positive linear hull of the set of vectors defined as follows.
For every is a (norm one) solution of the systemwhich also satisfies that Proof. First, note that for each the linear system defined above always has a subspace of solutions of dimension 1, because it is made of linear equations. So, we can choose a solution with norm equal to one, and also (if for all i, then , since is a basis).
Let us prove first that
Take an element
By the definition of the set of preference directions—they are linearly independent—, we have that the set
defined as in the statement of the result, is a basis for
Then,
v can be written as
, for real numbers
We have that
for all
Since
, we get that
This can be done for all
, and so we get that
Conversely, take an element
Then, it can be written as
where all the coordinates
are non-negative. Then,
But and and so for all k. Consequently, , and so
Therefore, and the result is proved. □
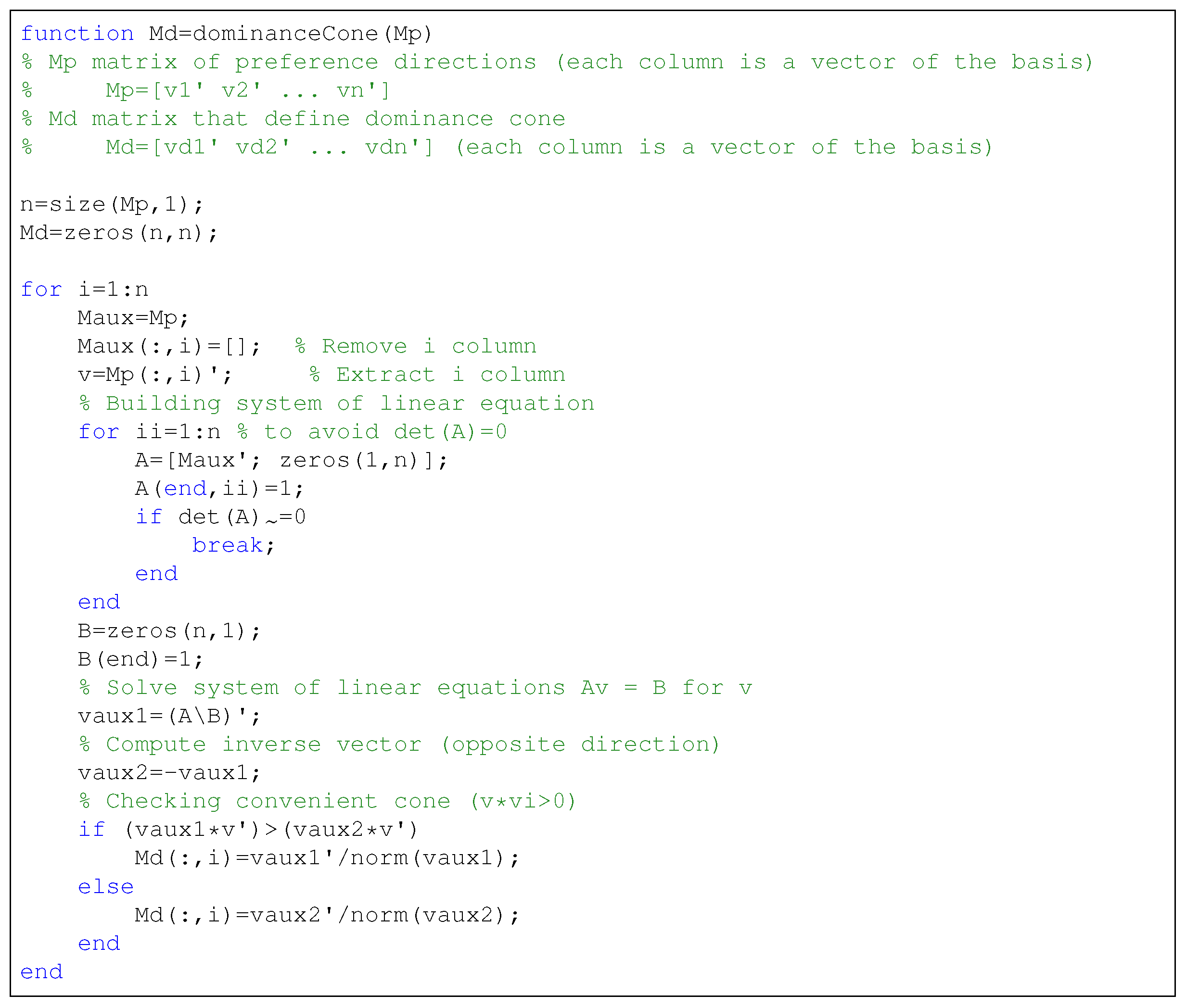
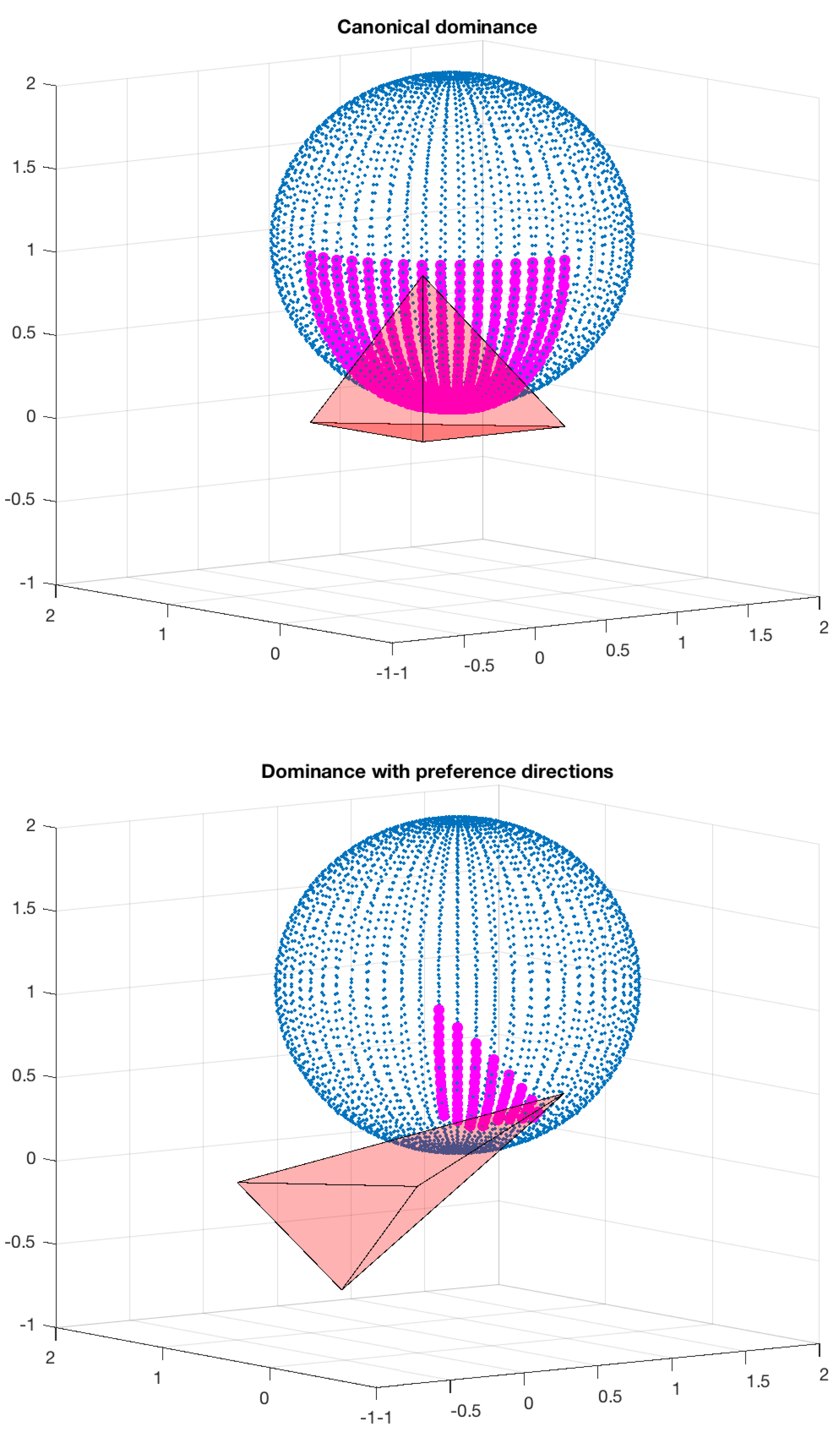
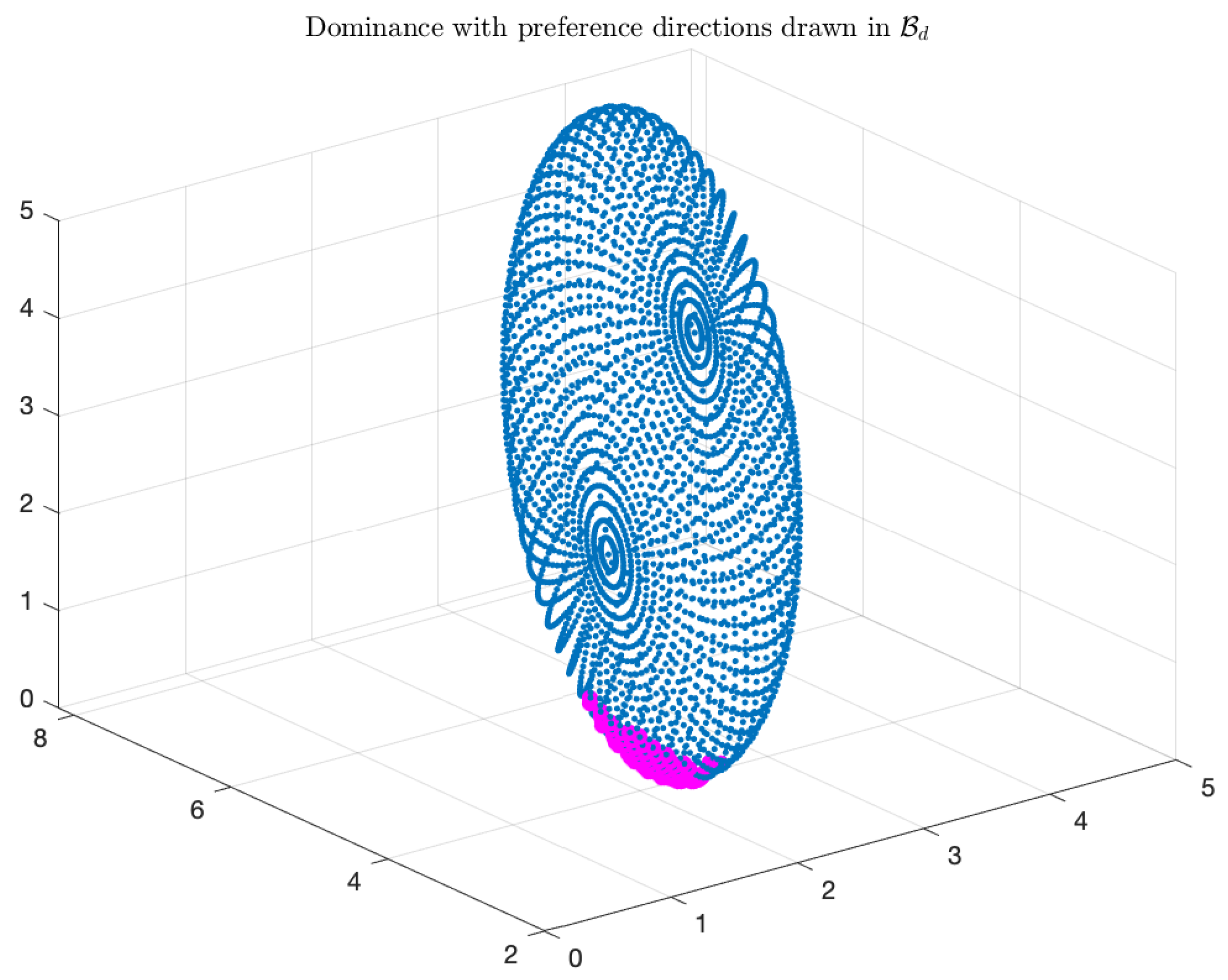
Based on Proposition 1, it is possible to give an algorithm that computes the vectors of the corresponding dominance basis
. An example with MATLAB is shown in
Figure 2.
4. Application Example: The Daily Diet Design Problem
In this section, we will develop a complete example regarding the design of a healthy diet. The original problem can be found in Reference [
18], where an alternative form of decision-making called TOPSIS is presented. The methodology tries to reach the compromise that the chosen alternative should have
the smallest distance from the positive ideal solution and
the largest distance from the negative ideal solution. Therefore, no preferences are proposed by the DM and cannot be compared with the proposal of the present work. In order to illustrate the methodology, we will propose some DM preferences.
The problem concerns the prescription of a diet for a patient who has some particular health characteristics. Suppose that the decision variables with their bound constraints are the following.
Milk pints:
Beef pounds:
Eggs dozen:
Bread ounces:
Lettuce and salad ounces:
Orange juice pints:
The problem has three
design objectives,
and
:
where
is the Carbohydrate intake [g],
is the Cholesterol intake [unit], and
is the Cost [
$].
There are also some constraints that affects the optimization calculations, regarding the amount of vitamin A [i.u] (
), iron [mg] (
), food energy [calories] (
), and proteins [g] (
).
The multi-objective problem to be solved can be written as follows:
Since it is a linear problem in both objectives and constraints, a classic optimization method obtains good results with a reasonable computational cost. Pareto front is obtained using a classic method,
-constraint method, described in Reference [
16]. Pareto front values are achieved by solving multiple mono-objective problems in which only one of the objectives is minimized, and the rest are considered as constraints. In order to obtain a suitable discretization of the front, it is necessary to vary the value of these constraints on the objectives in an adequate way. The steps are the following: first, the minimums of each independent objective are obtained. With these values we have the range of values where approximately the Pareto front is located. Subsequently, the increase to be applied to the restriction in each mono-objective problem is defined. In this particular case, the range of variation of two of the objectives (
y
) has been divided into 50 parts, obtaining
y
. Subsequently, multiple problems of a single objective are solved by adding constraints on the other objectives. Then, multiple problems (
2500) of a single objective are solved by adding constraints on the other objectives, that is, varying
n from 1 to 50 and
m from 1 to 50, and solving the following mono-objective problems:
If a better approach to the front is required, the process can be repeated minimizing or .
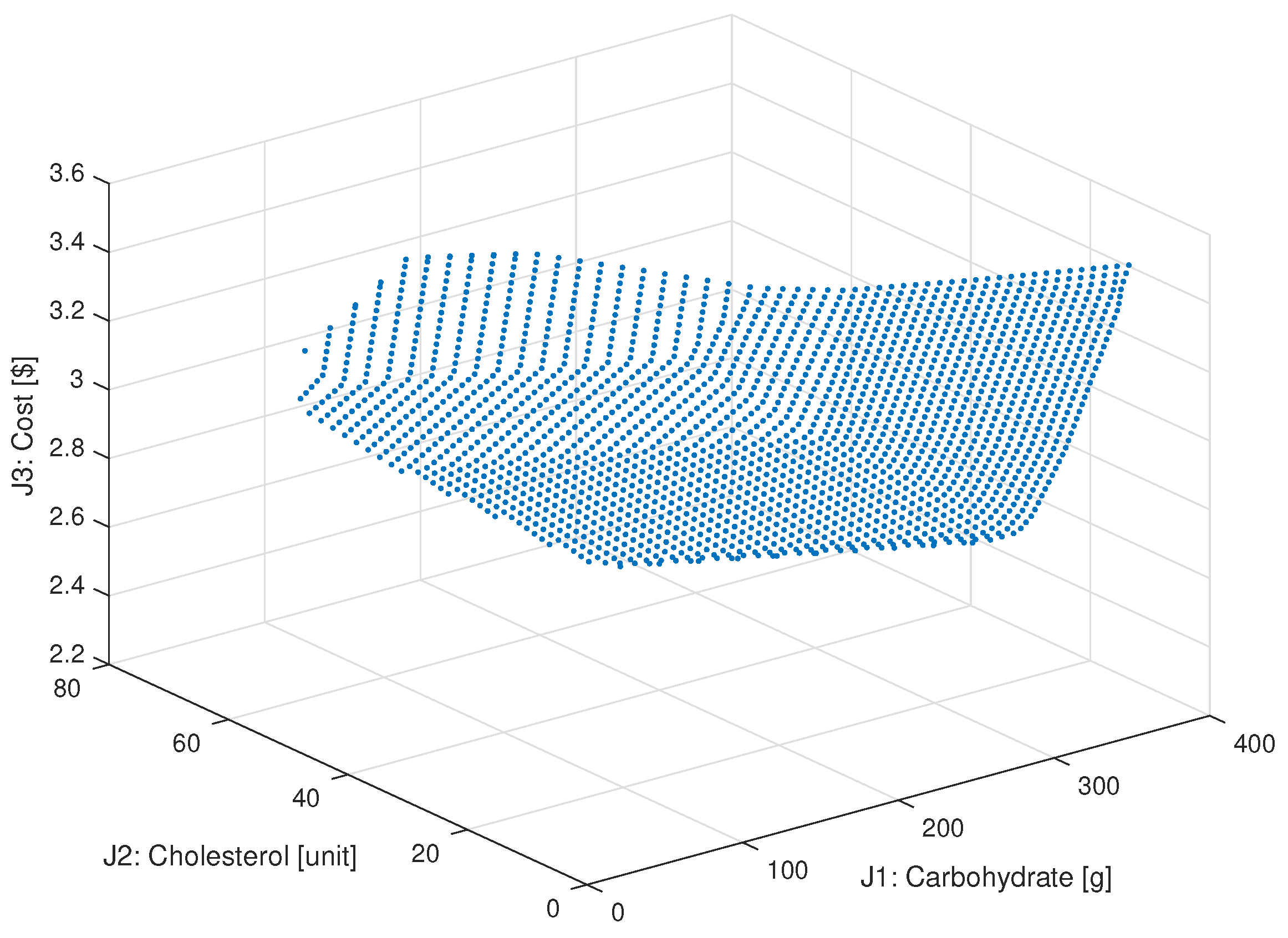
Since the problem is linear in both the target and the constraints, linear programming has been used. The approximation to the front obtained consists of 2049 points. Twenty-five hundred mono-objective problems have been executed, but some of them were not feasible; therefore, they did not provide a solution.
Figure 8 shows a 3D representation of the Pareto front approximation obtained.
The DM must analyze this front and select a solution that fits his preferences. The first step, to have fewer points to choose from, is to reduce the number of points to 342 while maintaining a good representation of the front. This can be done reducing the discretization step.
Then, to help in the decision-making, the Pareto front is colored according to distance to the ideal point; see
Figure 9 (upper). The ideal point corresponds to a possible solution obtained with the minimum values of each of the objectives.
This representation shows to the DM which are the points that present a more ’balanced’ compromise between objectives. It should be noted that, in order to calculate the distance to the ideal point, the front has been scaled trying to avoid the distortions that can be caused by the different units and orders of magnitude of each of the objectives. Each objective is rescaled between 0 and 1. With these new values, the distances to the ideal point are calculated (that corresponds to the point when applying the scaling).
This ’balanced’ solution is not always the preferred one, and the DM can decide on another order of preferences. It is very useful that these preferences will be incorporated in all phases of the MO problem resolution. In this case, a set of preferences defined by a vector base will be established.
Let us show now how to implement the preference directions by the DM, in this case, the doctor who treats the patient with special needs. Concretely, the doctor knows that the diet for the patient must satisfy preferably the following relations:
The ratio among the Carbohydrate intake and the Cholesterol intake must be as near as possible to 2. This means that the preference equation must be taken into account. This condition supplies one of the preference directions: .
Since there are a lot of bad quality Carbohydrates in the market, the doctor wants to promote the use of the correct ones.
An indirect way to increase the use of good quality carbohydrates is through cost. It is estimated that the impact on the price of the diet of such carbohydrates is around 1$ per 100 g of carbohydrates. Poor quality carbohydrates are significantly cheaper on the market. This allows to set a new direction of preference that is . This second conditions supplies another preference direction: .
The third preference direction maintains the original objective of minimizing cost: .
Summing up all these assumptions and converting these vectors into unit vectors the preference basis
and its corresponding dominance basis are:
By changing the base, the calculation of the distances is modified. The example shows how the ’color’ of the solutions closest to the ideal changes when these preferences are incorporated; see
Figure 9 (bottom).
It can be seen that coloring, considering these new preferences (see
Figure 9 (bottom)), orients the DM towards a different area of the front. Usually, these points would be more interesting for DM, and, consequently, he could choose more suitable solutions.
Table 1 shows the five best solutions extracted from each of the colored fronts. In particular, the points closest to the ideal point are shown. As you can see, the solutions obtained from coloring with preferences are closer to the preferences of the DM. The cost is lower, ratios among the Carbohydrate intake and the Cholesterol intake are nearest to two and ratios among Carbohydrate intake and Cost are nearest to 100. In this first case, the preference directions are used in the decision phase to assist the DM in making the final decision. This procedure does not reduce the number of solutions to be evaluated but enables a very simple way to visualize the results and select a subset of solutions of interest.
Another alternative is to use the preference directions in the optimization process itself as proposed in Equation (
4). The same multi-objective optimization method has been used to obtain the new front (constraint method). In this case, the range of variation of two of the objectives (
and
) has been divided into 10 parts and
mono-objective problems have been solved. The Pareto front achieved has 10 points (many of the mono-objective problems raised were not feasible and, therefore, did not provide a solution). Applying the preferences to modify the optimization problem has significantly reduced the computational cost and has focused the solution to the area of interest.
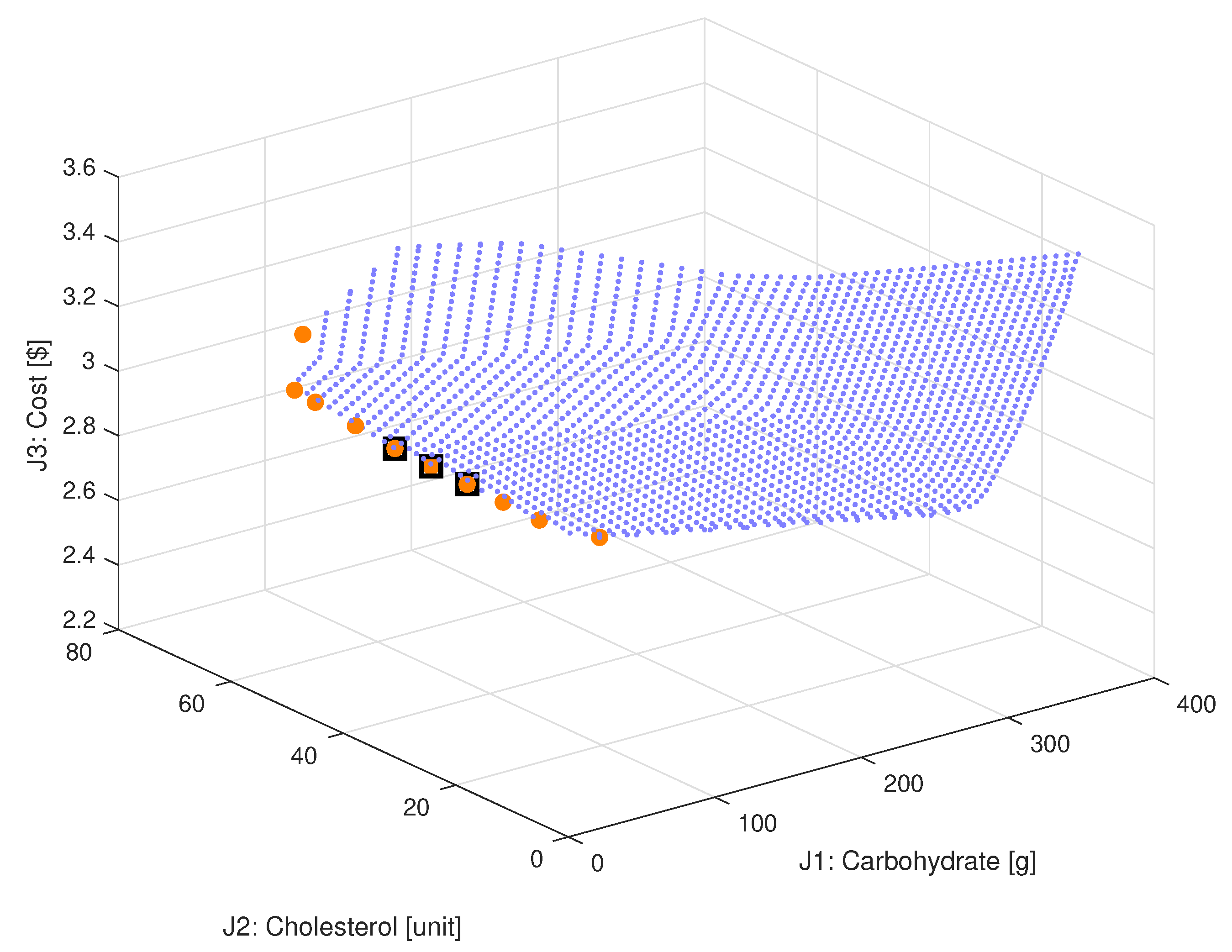
Figure 10 shows the new front obtained compared to the previous one (
Figure 8), the new front is colored in orange. There is a noticeable difference, since now the preferences have deformed the target space and have oriented the search towards a different zone adjusted to the DM’s preferences. It should be noted that the number of points of the front obtained is 10, which is significantly lower than the number of points obtained in the original front without considering preferences (2049 points). Among these new values, the DM can select, for example, a more balanced solution. The points highlighted with black square in the figure show 3 examples of balanced solutions. The particular values of this 3 solutions are shown in
Table 2.


 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}