
Design of an LMI-Based Fuzzy Fast Terminal Sliding Mode Control Approach for Uncertain MIMO Systems





Abstract
:1. Introduction
- A robust approach that yields faster finite-time convergence of the system states to the equilibrium, while it ensures chattering-free dynamics, even in the presence of uncertainties.
- An approach that combines FTSMC with fuzzy logic to adjust the sliding surface and switching control gains and further improve the system’s dynamic response.
- A FTSC approach in which control parameters are determined using the LMI approach.
2. Problem Statement and Assumption
3. Main Results
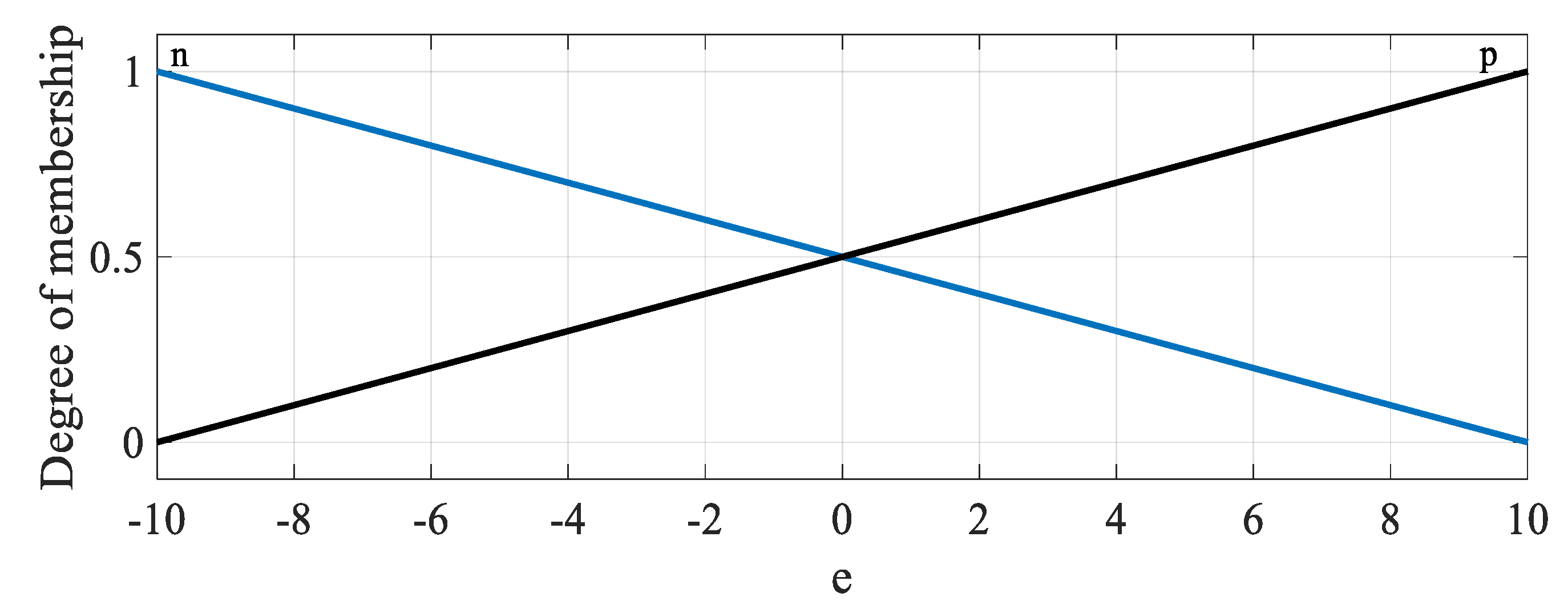
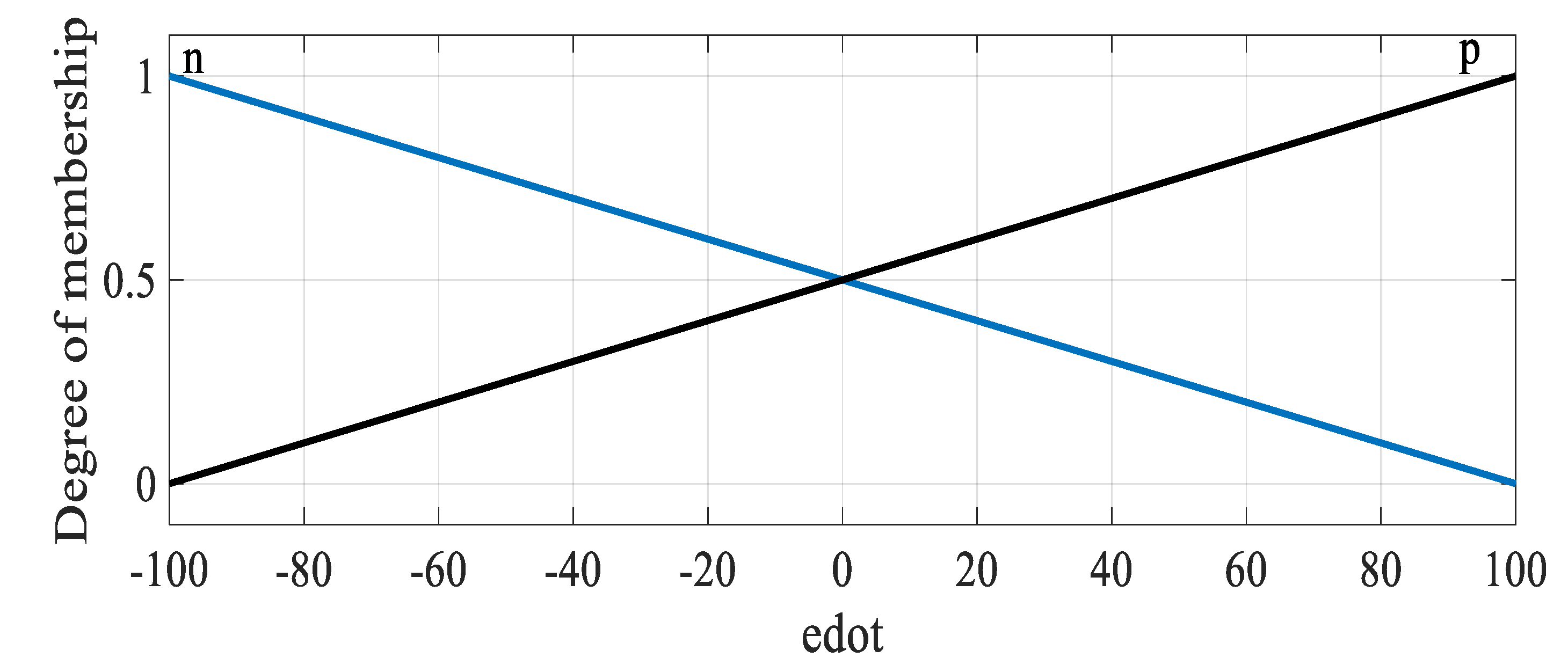
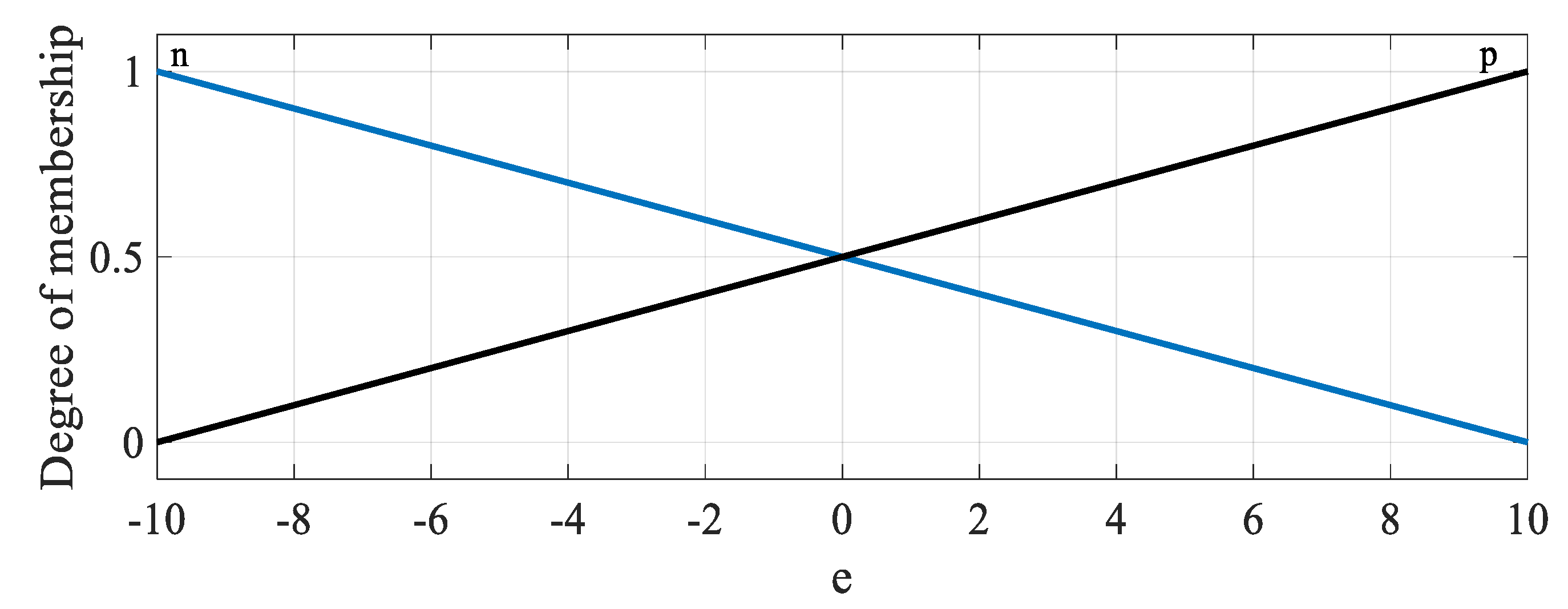
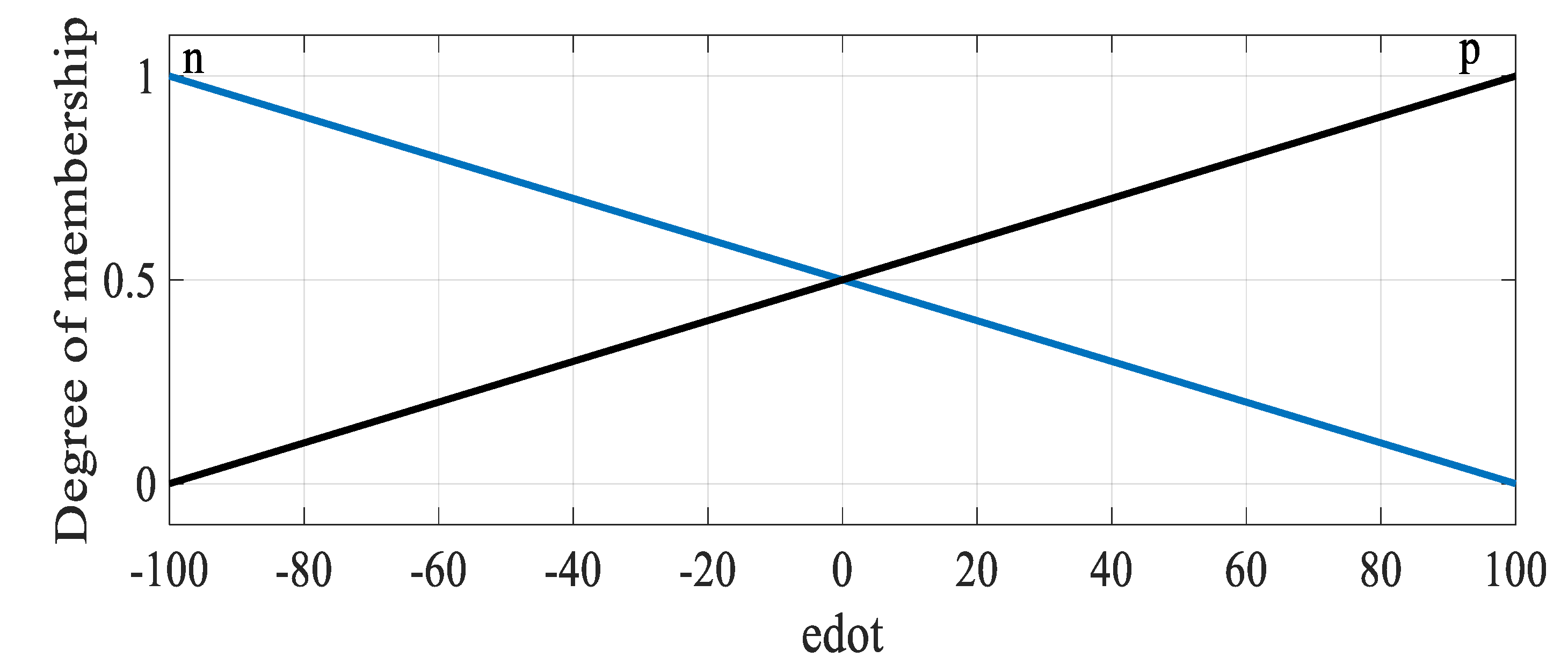
4. Fuzzy Fast Terminal Sliding Mode
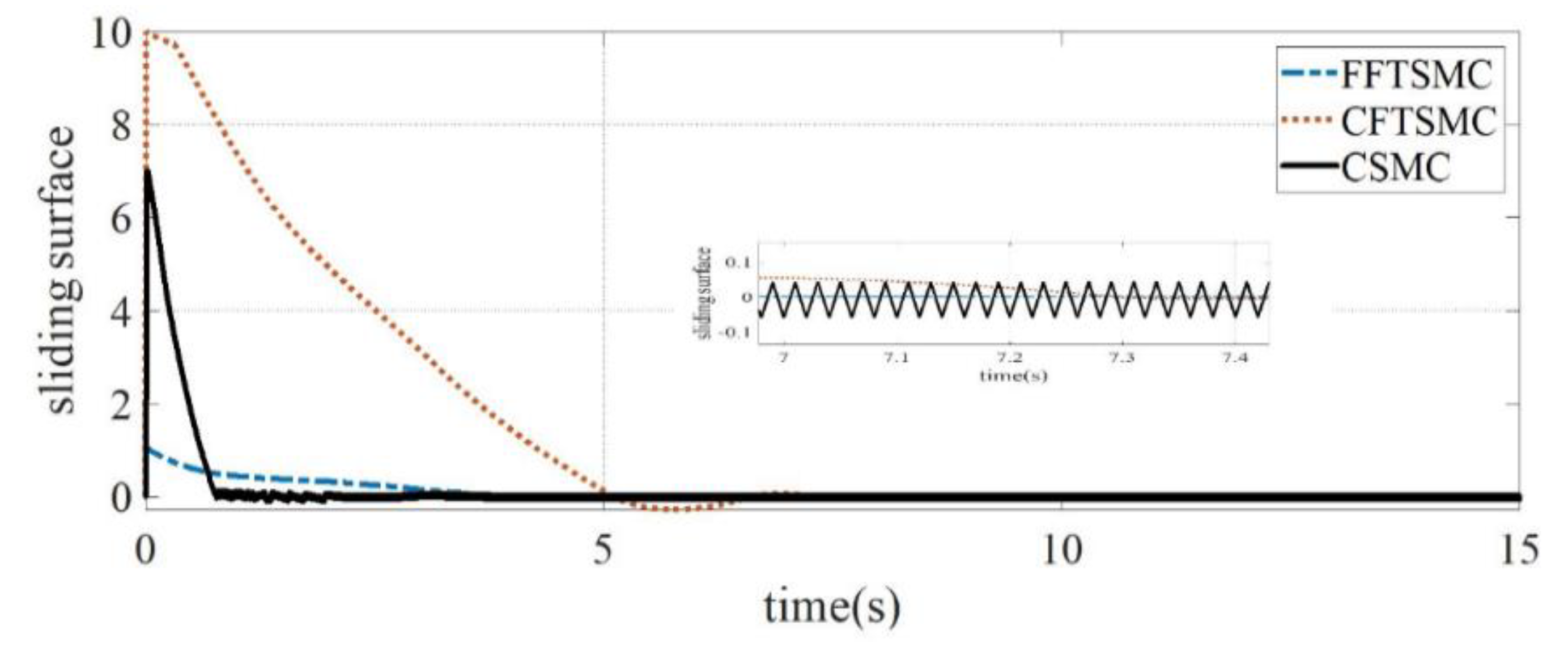
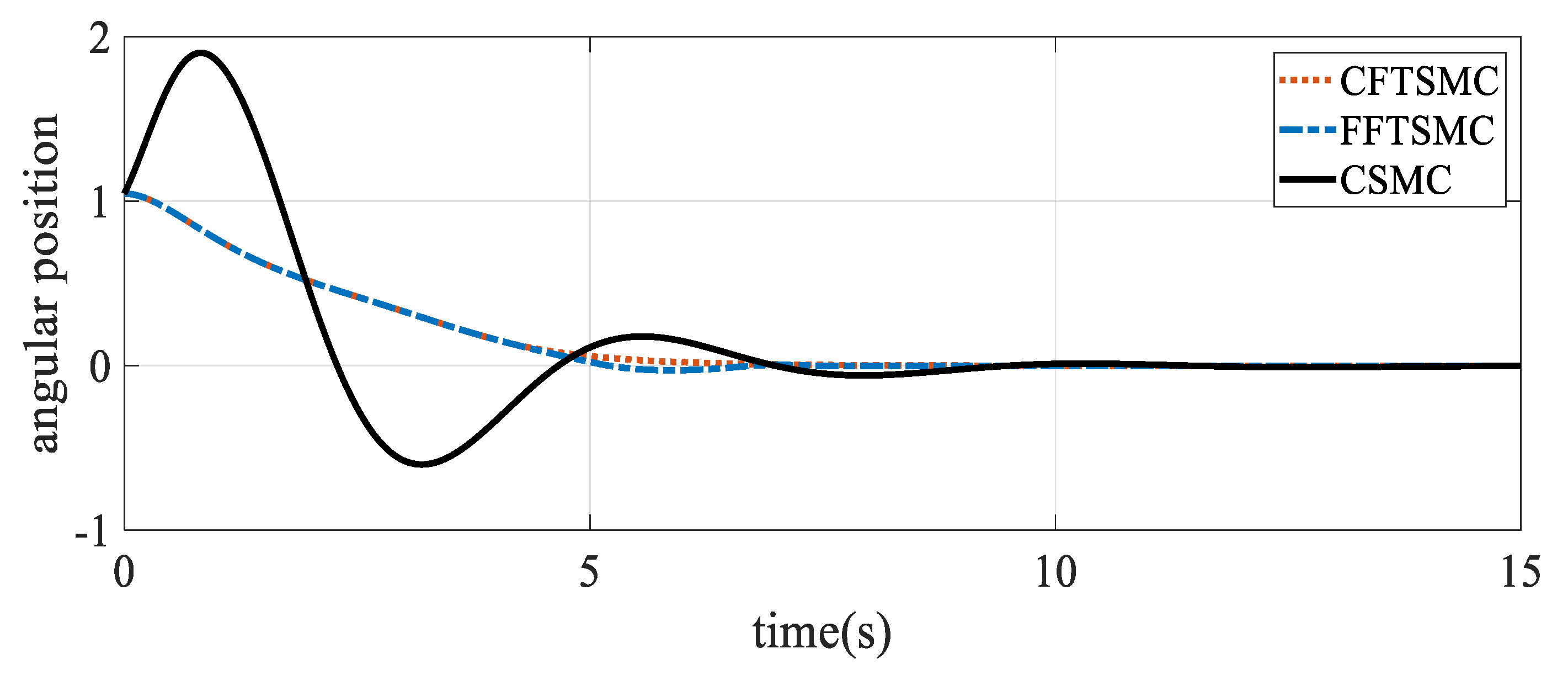
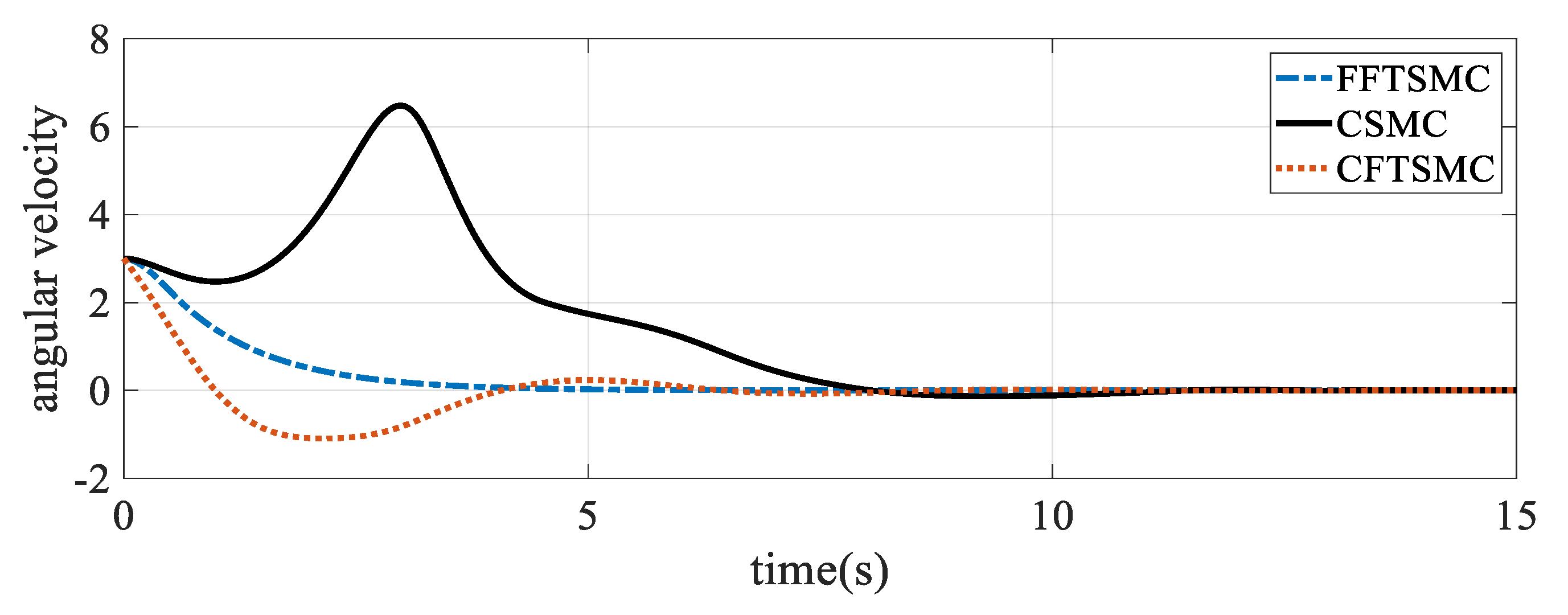
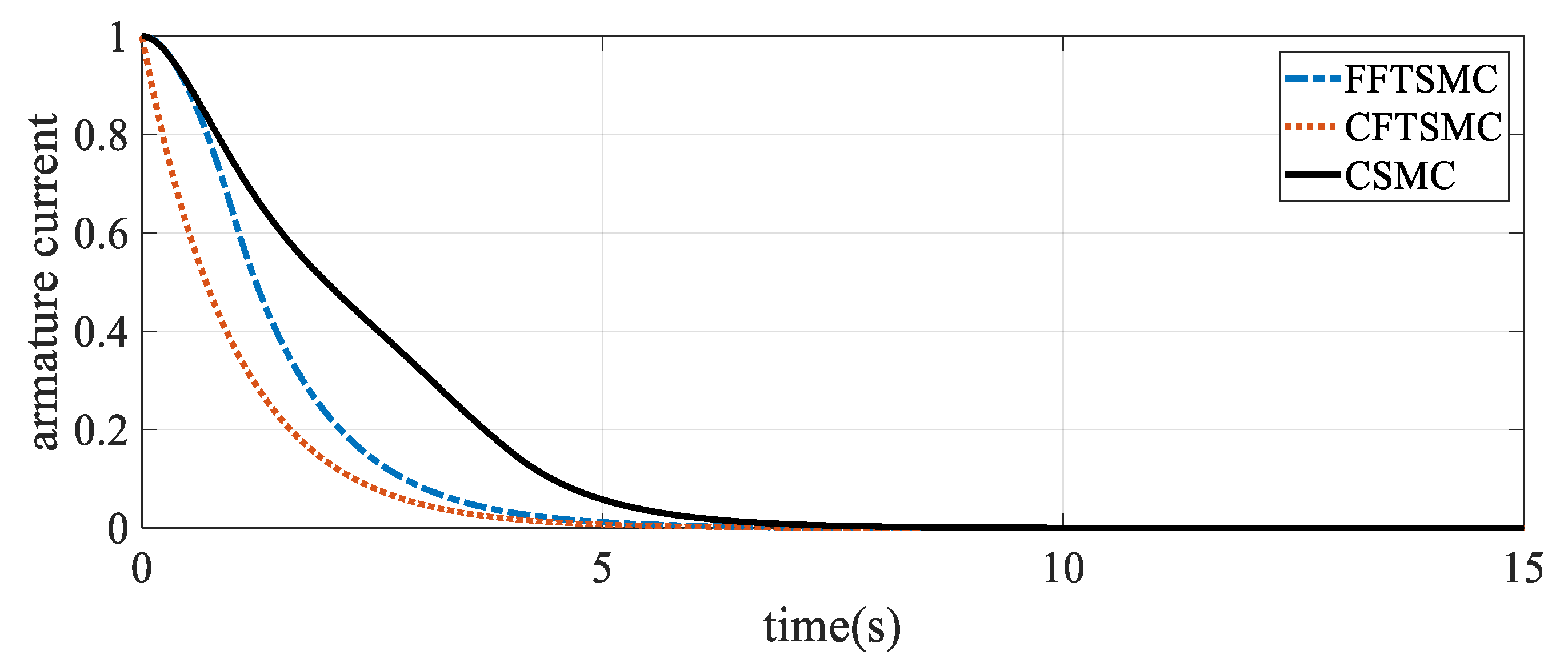
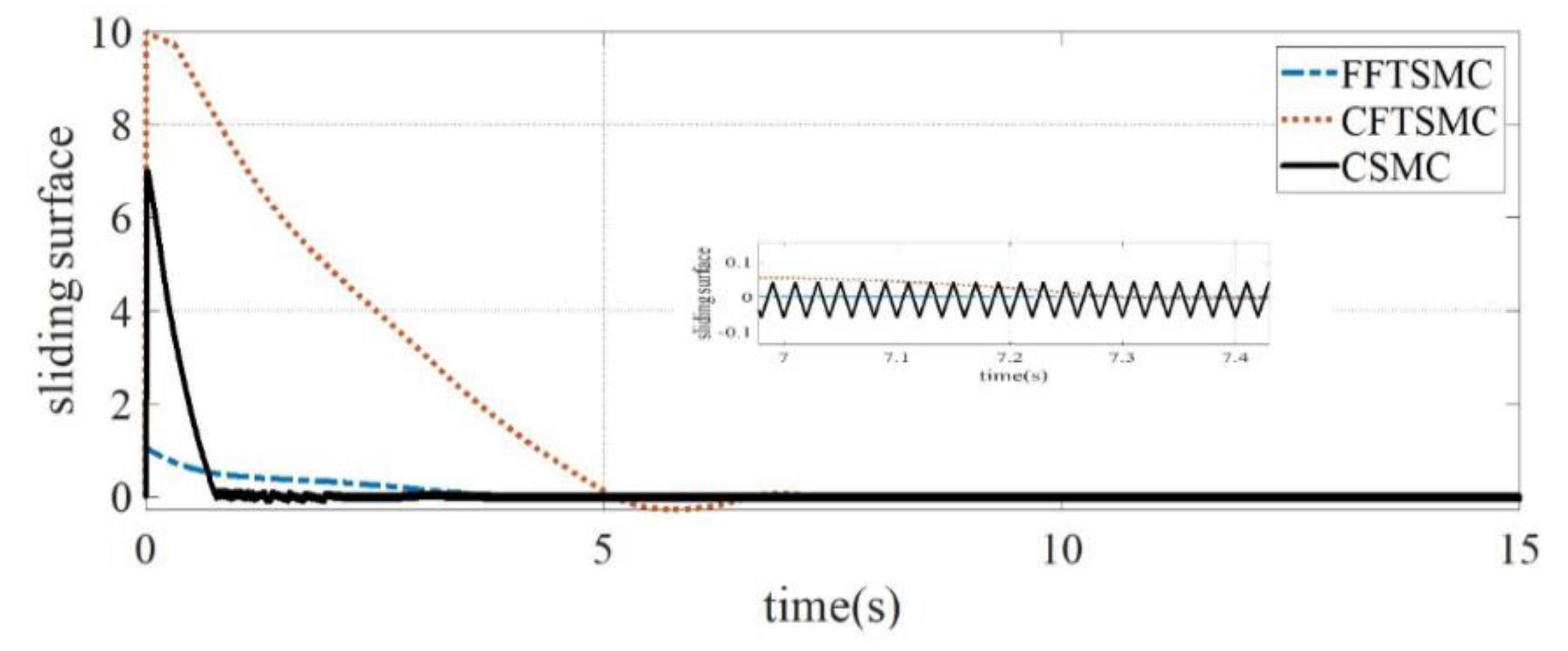
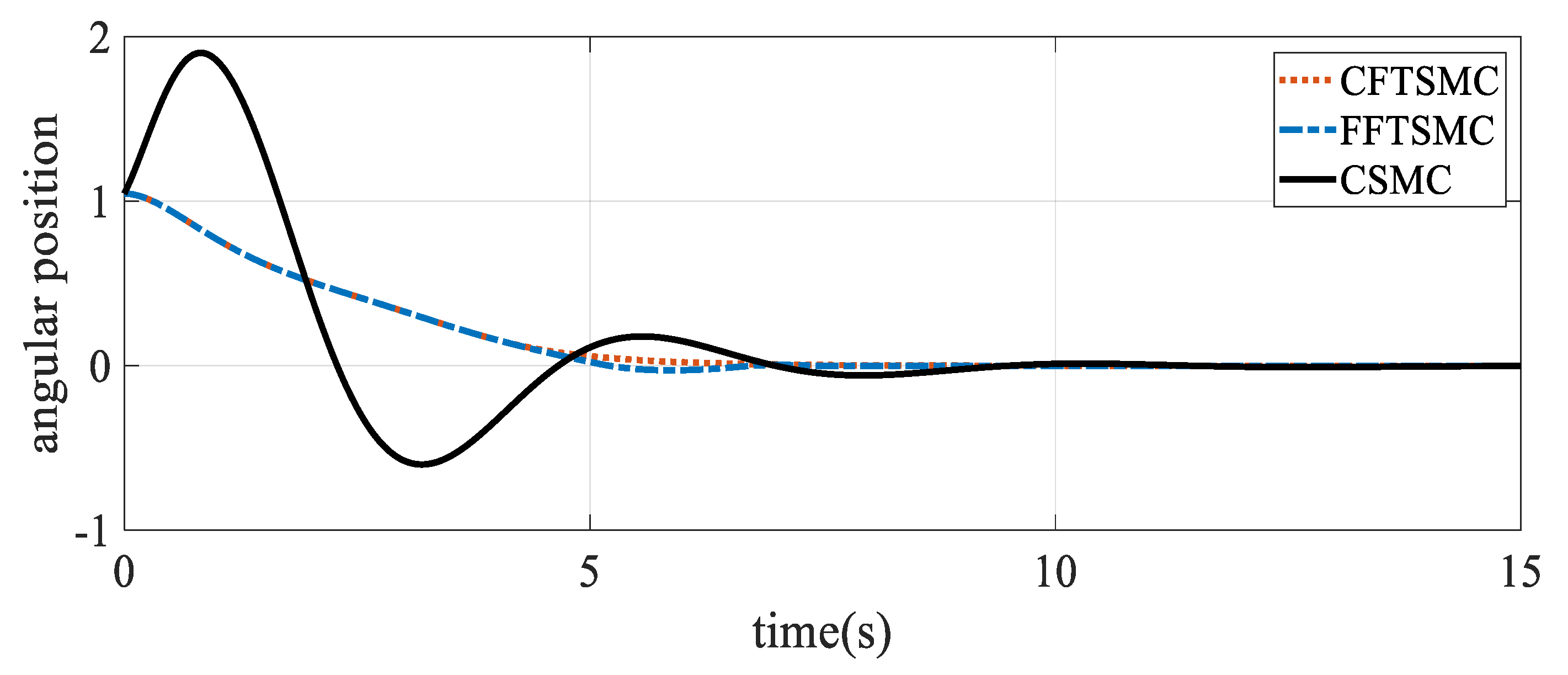
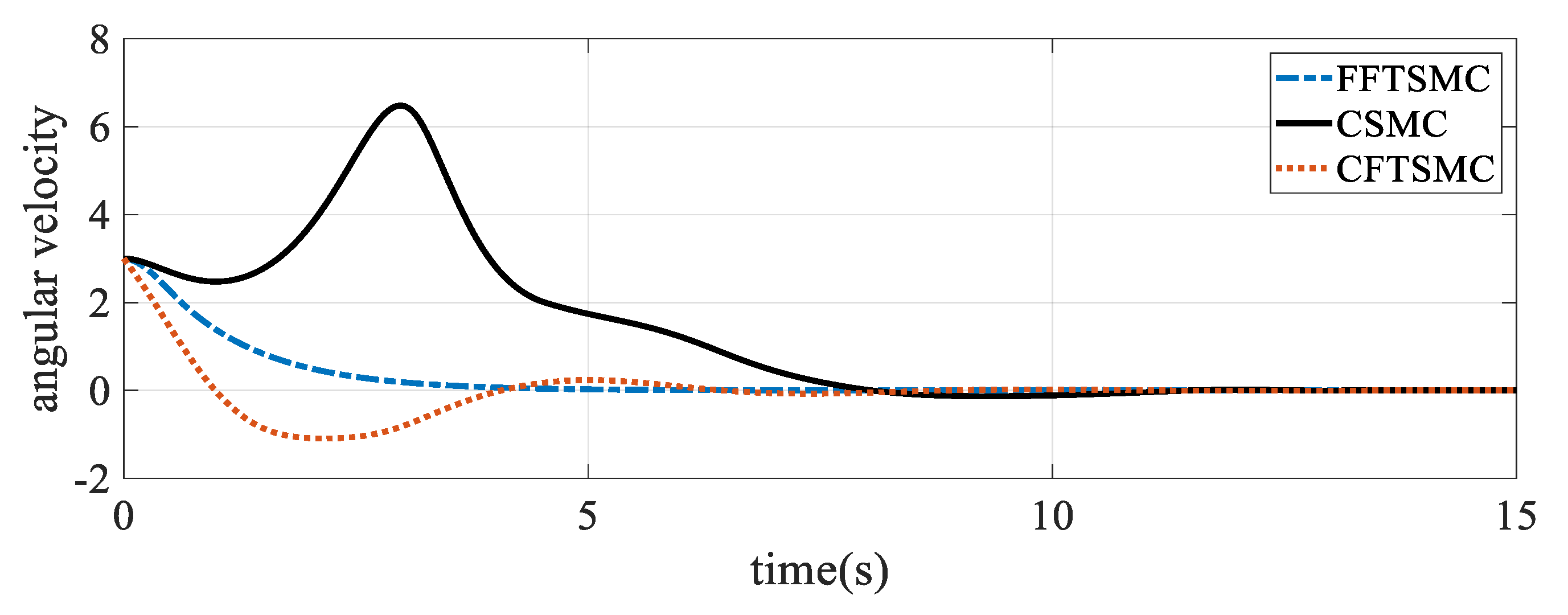
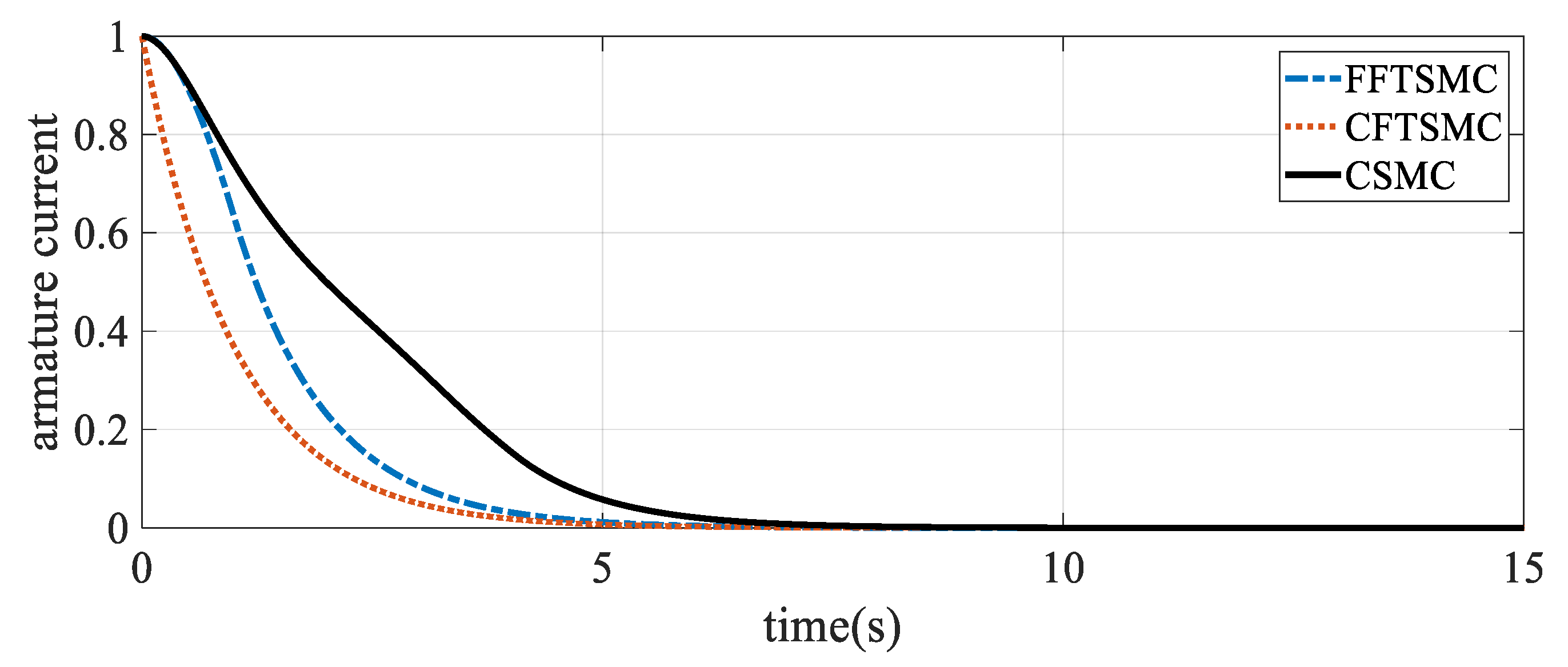
5. Simulation Results
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chen, R.; Wang, Z.; Che, W. Adaptive Sliding Mode Attitude-Tracking Control of Spacecraft with Prescribed Time Performance. Mathematics 2022, 10, 401. [Google Scholar] [CrossRef]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Patience Hall: Hoboken, NJ, USA, 2002; p. 115. [Google Scholar]
- Spurgeon, S. Sliding Mode Control: Theory and Applications; CRC Press: Boca Raton, FL, USA, 1998. [Google Scholar]
- Mobayen, S. An LMI-based robust controller design using global nonlinear sliding surfaces and application to chaotic systems. Nonlinear Dyn. 2015, 79, 1075–1084. [Google Scholar] [CrossRef]
- Mobayen, S. Design of LMI-based sliding mode controller with an exponential policy for a class of underactuated systems. Complexity 2016, 21, 117–124. [Google Scholar] [CrossRef]
- Levant, A. Homogeneity approach to high-order sliding mode design. Automatica 2005, 41, 823–830. [Google Scholar] [CrossRef]
- Wu, Y.; Yu, X.; Man, Z. Terminal sliding mode control design for uncertain dynamic systems. Syst. Control Lett. 1998, 34, 281–287. [Google Scholar] [CrossRef]
- Zhihong, M.; Yu, X.H. Terminal sliding mode control of MIMO linear systems. IEEE Trans. Circuits Syst. I: Fundam. Theory Appl. 1997, 44, 1065–1070. [Google Scholar] [CrossRef]
- Liu, J.; Sun, F. A novel dynamic terminal sliding mode control of uncertain nonlinear systems. J. Control Theory Appl. 2007, 5, 189–193. [Google Scholar] [CrossRef]
- Behnamgol, V.; Vali, A.R. Terminal sliding mode control for nonlinear systems with both matched and unmatched uncertainties. Iran. J. Electr. Electron. Eng. 2015, 11, 109–117. [Google Scholar]
- Yu, X.; Zhihong, M. Fast terminal sliding-mode control design for nonlinear dynamical systems. IEEE Trans. Circuits Syst. I: Fundam. Theory Appl. 2002, 49, 261–264. [Google Scholar]
- Yang, L.; Yang, J. Nonsingular fast terminal sliding-mode control for nonlinear dynamical systems. Int. J. Robust Nonlinear Control 2011, 21, 1865–1879. [Google Scholar] [CrossRef]
- Yang, L.; Yang, J. Robust finite-time convergence of chaotic systems via adaptive terminal sliding mode scheme. Commun. Nonlinear Sci. Numer. Simul. 2011, 16, 2405–2413. [Google Scholar] [CrossRef]
- Mobayen, S. Fast terminal sliding mode tracking of non-holonomic systems with exponential decay rate. IET Control Theory Appl. 2015, 9, 1294–1301. [Google Scholar] [CrossRef]
- Xu, S.S.-D.; Chen, C.-C.; Wu, Z.-L. Study of nonsingular fast terminal sliding-mode fault-tolerant control. IEEE Trans. Ind. Electron. 2015, 62, 3906–3913. [Google Scholar] [CrossRef]
- Truong, T.N.; Vo, A.T.; Kang, H.-J. A backstepping global fast terminal sliding mode control for trajectory tracking control of industrial robotic manipulators. IEEE Access 2021, 9, 31921–31931. [Google Scholar] [CrossRef]
- Mobayen, S.; Baleanu, D.; Tchier, F. Second-order fast terminal sliding mode control design based on LMI for a class of non-linear uncertain systems and its application to chaotic systems. J. Vib. Control 2017, 23, 2912–2925. [Google Scholar] [CrossRef]
- Wang, H.; Han, Z.-Z.; Xie, Q.-Y.; Zhang, W. Finite-time chaos control via nonsingular terminal sliding mode control. Commun. Nonlinear Sci. Numer. Simul. 2009, 14, 2728–2733. [Google Scholar] [CrossRef]
- Mobayen, S.; Majd, V.J.; Sojoodi, M. An LMI-based composite nonlinear feedback terminal sliding-mode controller design for disturbed MIMO systems. Math. Comput. Simul. 2012, 85, 1–10. [Google Scholar] [CrossRef]
- Singh, S.; Janardhanan, S. Fast terminal sliding mode control for twin rotor multi-input multi-output system. In Proceedings of the 2015 Annual IEEE India Conference (INDICON), New Delhi, India, 17–20 December 2015; pp. 1–5. [Google Scholar]
- Shi, K.; Liu, C.; Sun, Z.; Yue, X. Coupled orbit-attitude dynamics and trajectory tracking control for spacecraft electromagnetic docking. Appl. Math. Model. 2022, 101, 553–572. [Google Scholar] [CrossRef]
- Qiu, Z.-C.; Zhang, S.-M. Fuzzy fast terminal sliding mode vibration control of a two-connected flexible plate using laser sensors. J. Sound Vib. 2016, 380, 51–77. [Google Scholar] [CrossRef]
- Song, J.; Zheng, W.X.; Niu, Y. Self-Triggered Sliding Mode Control for Networked PMSM Speed Regulation System: A PSO-Optimized Super-Twisting Algorithm. IEEE Trans. Ind. Electron. 2021, 69, 763–773. [Google Scholar] [CrossRef]
- Yao, Q. Adaptive finite-time sliding mode control design for finite-time fault-tolerant trajectory tracking of marine vehicles with input saturation. J. Frankl. Inst. 2020, 357, 13593–13619. [Google Scholar] [CrossRef]
- Nekoukar, V.; Erfanian, A. Adaptive fuzzy terminal sliding mode control for a class of MIMO uncertain nonlinear systems. Fuzzy Sets Syst. 2011, 179, 34–49. [Google Scholar] [CrossRef]
- Li, T.-H.S.; Huang, Y.-C. MIMO adaptive fuzzy terminal sliding-mode controller for robotic manipulators. Inf. Sci. 2010, 180, 4641–4660. [Google Scholar] [CrossRef]
- Abrazeh, S.; Parvaresh, A.; Mohseni, S.-R.; Zeitouni, M.J.; Gheisarnejad, M.; Khooban, M.H. Nonsingular Terminal Sliding Mode Control with Ultra-Local Model and Single Input Interval Type-2 Fuzzy Logic Control for Pitch Control of Wind Turbines. IEEE/CAA J. Autom. Sin. 2021, 8, 690–700. [Google Scholar] [CrossRef]
- Abadi, A.S.S.; Hosseinabadi, P.A.; Mekhilef, S. Fuzzy adaptive fixed-time sliding mode control with state observer for a class of high-order mismatched uncertain systems. Int. J. Control Autom. Syst. 2020, 18, 2492–2508. [Google Scholar] [CrossRef]
- Yang, Y.; Niu, Y.; Zhang, Z. Dynamic event-triggered sliding mode control for interval Type-2 fuzzy systems with fading channels. ISA Trans. 2021, 110, 53–62. [Google Scholar] [CrossRef]
- Yang, Y.; Niu, Y.; Reza Karimi, H. Dynamic learning control design for interval type-2 fuzzy singularly perturbed systems: A component-based event-triggering protocol. Int. J. Robust Nonlinear Control 2022, 32, 2518–2535. [Google Scholar] [CrossRef]
- Feng, Y.; Zhou, M.; Zheng, X.; Han, F.; Yu, X. Full-order terminal sliding-mode control of MIMO systems with unmatched uncertainties. J. Frankl. Inst. 2018, 355, 653–674. [Google Scholar] [CrossRef]
- Mobayen, S. Design of LMI-based global sliding mode controller for uncertain nonlinear systems with application to Genesio’s chaotic system. Complexity 2015, 21, 94–98. [Google Scholar] [CrossRef]
- Sun, C.; Gong, G.; Yang, H.; Wang, F. Fuzzy sliding mode control for synchronization of multiple induction motors drive. Trans. Inst. Meas. Control 2019, 41, 3223–3234. [Google Scholar] [CrossRef]
- Wu, G.; Zhang, X.; Zhu, L.; Lin, Z.; Liu, J. Fuzzy sliding mode variable structure control of a high-speed parallel PnP robot. Mech. Mach. Theory 2021, 162, 104349. [Google Scholar] [CrossRef]
- Liu, J.; Sun, F. Fuzzy global sliding mode control for a servo system with lugre friction model. In Proceedings of the 2006 6th World Congress on Intelligent Control and Automation, Dalian, China, 21–23 June 2006; pp. 1933–1936. [Google Scholar]
- Wang, J.; Rad, A.B.; Chan, P. Indirect adaptive fuzzy sliding mode control: Part I: Fuzzy switching. Fuzzy Sets Syst. 2001, 122, 21–30. [Google Scholar] [CrossRef]
- Zadeh, L. Fuzzy Algorithms. Inf. Control 1968, 12, 94–102. [Google Scholar] [CrossRef] [Green Version]
- Umeno, T.; Hori, Y. Robust speed control of DC servomotors using modern two degrees-of-freedom controller design. IEEE Trans. Ind. Electron. 1991, 38, 363–368. [Google Scholar] [CrossRef]
- Yazici, İ.; Yaylaci, E.K. Fast and robust voltage control of DC–DC boost converter by using fast terminal sliding mode controller. IET Power Electron. 2016, 9, 120–125. [Google Scholar] [CrossRef]
- Qureshi, M.S.; Swarnkar, P.; Gupta, S. Assessment of DC servo motor with sliding mode control approach. In Proceedings of the 2016 IEEE First International Conference on Control, Measurement and Instrumentation (CMI), Kolkata, India, 8–10 January 2016; pp. 351–355. [Google Scholar]
- Ünsal, S.; Aliskan, I. Investigation of performance of fuzzy logic controllers optimized with the hybrid genetic-gravitational search algorithm for PMSM speed control. Automatika 2022, 63, 313–327. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values |
|---|---|
| Armature Resistance (R) | |
| Armature Inductance (L) | |
| Motor inertia (J) | |
| Friction Constant (B) | |
| Torque constant | |
| Back emf constant | |
| Rated Speed |
| Controller | Time of Convergences to Zero Tracking Error | Control Signal Range | Chattering Phenomenon | IAE | |
|---|---|---|---|---|---|
| Proposed method | No | ||||
| CFTSM | No | ||||
| CSM | Yes |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mokhtare, Z.; Vu, M.T.; Mobayen, S.; Fekih, A. Design of an LMI-Based Fuzzy Fast Terminal Sliding Mode Control Approach for Uncertain MIMO Systems. Mathematics 2022, 10, 1236. https://doi.org/10.3390/math10081236
Mokhtare Z, Vu MT, Mobayen S, Fekih A. Design of an LMI-Based Fuzzy Fast Terminal Sliding Mode Control Approach for Uncertain MIMO Systems. Mathematics. 2022; 10(8):1236. https://doi.org/10.3390/math10081236
Chicago/Turabian StyleMokhtare, Zahra, Mai The Vu, Saleh Mobayen, and Afef Fekih. 2022. "Design of an LMI-Based Fuzzy Fast Terminal Sliding Mode Control Approach for Uncertain MIMO Systems" Mathematics 10, no. 8: 1236. https://doi.org/10.3390/math10081236
APA StyleMokhtare, Z., Vu, M. T., Mobayen, S., & Fekih, A. (2022). Design of an LMI-Based Fuzzy Fast Terminal Sliding Mode Control Approach for Uncertain MIMO Systems. Mathematics, 10(8), 1236. https://doi.org/10.3390/math10081236