
Event-Triggered Extended Kalman Filtering Analysis for Networked Systems


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
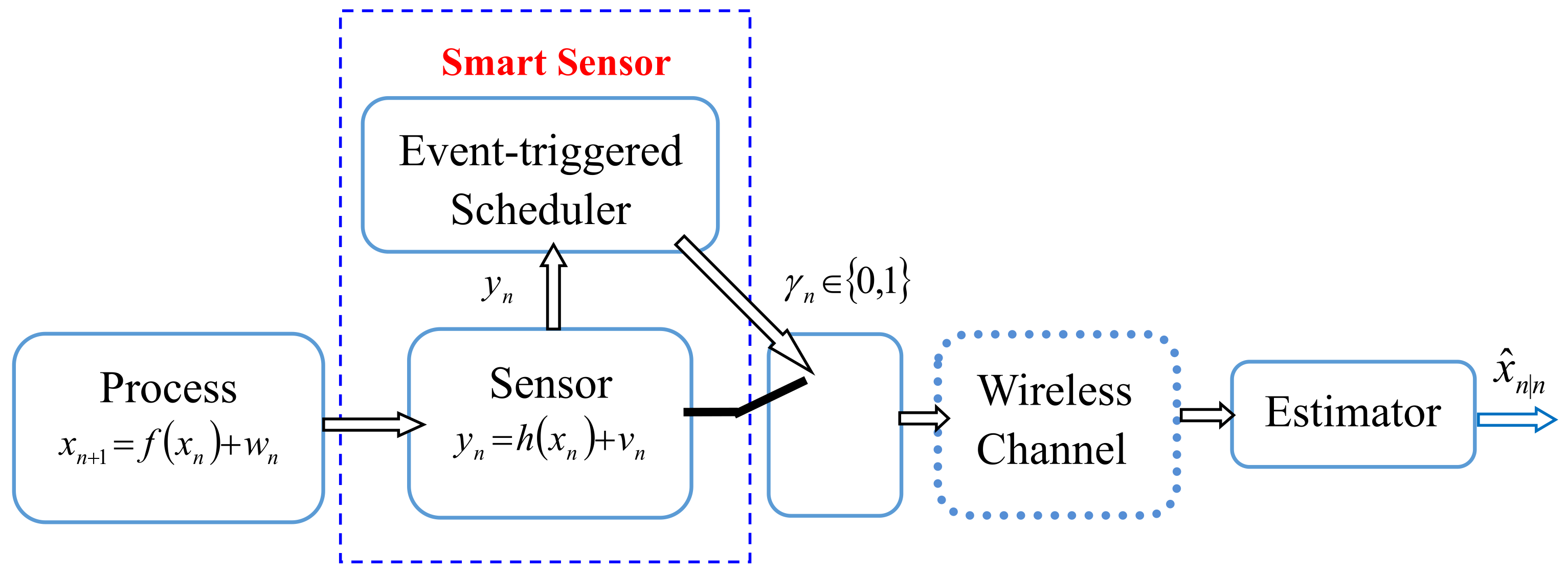
2. System and Problem Description
3. Design of Event-Triggered EKF
| Algorithm 1 Event-triggered EKF scheduler. |
1. Prior estimate and error covariance matrix: , . 2. Time update: given , , do , . Sensor scheduling: Let the scheduling variable be given by: Data transmission: If , send to the estimator. 3. Measurement update: let , do , , where , . |
4. Estimation Error Analysis
4.1. Boundedness of the Estimation Error
4.2. Boundedness of the Error Covariance Matrices
5. Numerical Simulation
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| WSN | wireless sensor network |
| KF | Kalman filter |
| MMSE | minimum mean square error |
| EKF | extended Kalman filter |
| UKF | untraced Kalman filter |
| ETC | event-triggered control |
References
- García-Ligero, M.J.; Hermoso-Carazo, A.; Linares-Pérez, J. Distributed fusion estimation with sensor gain degradation and Markovian delays. Mathematics 2020, 8, 1948. [Google Scholar] [CrossRef]
- Li, X.; Peng, D.; Cao, J. Lyapunov stability for impulsive systems via event-triggered impulsive control. IEEE Trans. Autom. Control 2020, 65, 4908–4913. [Google Scholar] [CrossRef]
- Yu, W.; Chen, G.; Wang, Z.; Yang, W. Distributed consensus filtering in sensor networks. IEEE Trans. Syst. Man Cybern. Part B-Cybern. 2009, 39, 1568–1577. [Google Scholar]
- Li, X.; Zhang, T.; Wu, J. Input-to-state stability of impulsive systems via event-triggered impulsive control. IEEE Trans. Cybern. 2021, in press. [CrossRef] [PubMed]
- Yang, W.; Zheng, Z.; Chen, G.; Tang, Y.; Wang, X. Security analysis of a distributed networked system under eavesdropping attacks. IEEE Trans. Circuits Syst. II-Express Briefs 2020, 67, 1254–1258. [Google Scholar] [CrossRef]
- Simon, D.; Tien, L.C. Kalman filtering with state equality constraints. IEEE Trans. Aerosp. Electron. Syst. 2002, 38, 128–136. [Google Scholar] [CrossRef] [Green Version]
- Nikoukhah, R.; Campbell, S.L.; Delebecque, F. Kalman filtering for general discrete-time linear systems. IEEE Trans. Autom. Control 1999, 44, 1829–1839. [Google Scholar] [CrossRef]
- Teng, J.L.; Yao, M. The Kalman filter as the optimal linear minimum mean-squared error multiuser CDMA detector. IEEE Trans. Inf. Theory 2000, 46, 2561–2566. [Google Scholar]
- Assa, A.; Janabi-Sharifi, F. A Kalman filter-based framework for enhanced sensor fusion. IEEE Sens. J. 2015, 15, 3281–3292. [Google Scholar] [CrossRef]
- Antoniou, C.; Ben-Akiva, M.; Koutsopoulos, H.N. Nonlinear Kalman filtering algorithms for on-line calibration of dynamic traffic assignment models. IEEE Trans. Intell. Transp. Syst. 2007, 8, 661–670. [Google Scholar] [CrossRef]
- Muhammad, W.; Ahsan, A. Airship aerodynamic model estimation using unscented Kalman filter. J. Syst. Eng. Electron. 2020, 31, 1318–1329. [Google Scholar] [CrossRef]
- Giannitrapani, A.; Ceccarelli, N.; Scortecci, F.; Garulli, A. Comparison of EKF and UKF for spacecraft localization via angle measurements. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 75–84. [Google Scholar] [CrossRef]
- Zhou, Y.; Zhang, Q.; Wang, H.; Zhou, P.; Chai, T. EKF-based enhanced performance controller design for nonlinear stochastic systems. IEEE Trans. Autom. Control 2018, 63, 1155–1162. [Google Scholar] [CrossRef] [Green Version]
- Pantaleon, C.; Souto, A. An aperiodic phenomenon of the extended Kalman filter in filtering noisy chaotic signals. IEEE Trans. Signal Process 2005, 53, 383–384. [Google Scholar] [CrossRef]
- Kluge, S.; Reif, K.; Brokate, M. Stochastic stability of the extended Kalman filter with intermittent observations. IEEE Trans. Autom. Control 2010, 55, 514–518. [Google Scholar] [CrossRef]
- Jiancheng, F.; Sheng, Y. Study on innovation adaptive EKF for in-flight alignment of airborne POS. IEEE Trans. Instrum. Meas. 2011, 60, 1378–1388. [Google Scholar] [CrossRef]
- Hu, F.; Wu, G. Distributed error correction of EKF algorithm in multi-sensor fusion localization model. IEEE Access 2010, 8, 93211–93218. [Google Scholar] [CrossRef]
- Charkhgard, M.; Farrokhi, M. State-of-charge estimation for lithium-ion batteries using neural networks and EKF. IEEE Trans. Ind. Electron. 2010, 57, 4178–4187. [Google Scholar] [CrossRef]
- Li, X.; Li, P. Input-to-state stability of nonlinear systems: Event-triggered impulsive control. IEEE Trans. Autom. Control 2021, 67, 1460–1465. [Google Scholar] [CrossRef]
- Li, X.; Zhu, H.; Song, S. Input-to-state stability of nonlinear systems using observer-based event-triggered impulsive control. IEEE Trans. Syst. 2021, 51, 6892–6900. [Google Scholar] [CrossRef]
- Borri, A.; Pepe, P. Event-triggered control of nonlinear systems with time-varying state delays. IEEE Trans. Autom. Control 2021, 66, 2846–2853. [Google Scholar] [CrossRef]
- Shi, D.; Chen, T.; Shi, L. On set-valued Kalman filtering and its application to event-based state estimation. IEEE Trans. Autom. Control 2015, 60, 1275–1290. [Google Scholar] [CrossRef]
- Xu, J.; Ho, D.W.C.; Li, F.; Yang, W.; Tang, Y. Event-triggered risk-sensitive state estimation for hidden Markov models. IEEE Trans. Autom. Control 2019, 64, 4276–4283. [Google Scholar] [CrossRef]
- Xu, J.; Tang, Y.; Yang, W.; Li, F.; Shi, L. Event-triggered minimax state estimation with a relative entropy constraint. Automatica 2019, 110, 108592. [Google Scholar] [CrossRef]
- Wu, J.; Jia, Q.-S.; Johansson, K.H.; Shi, L. Event-based sensor data scheduling: Trade-off between communication rate and estimation quality. IEEE Trans. Autom. Control 2013, 58, 1041–1046. [Google Scholar] [CrossRef] [Green Version]
- Li, L.; Niu, M.; Yang, H.; Liu, Z. Event-triggered nonlinear filtering for networked systems with correlated noises. J. Franklin Inst. 2018, 355, 5811–5829. [Google Scholar] [CrossRef]


Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, H.; Xu, J.; Li, F. Event-Triggered Extended Kalman Filtering Analysis for Networked Systems. Mathematics 2022, 10, 927. https://doi.org/10.3390/math10060927
Zhao H, Xu J, Li F. Event-Triggered Extended Kalman Filtering Analysis for Networked Systems. Mathematics. 2022; 10(6):927. https://doi.org/10.3390/math10060927
Chicago/Turabian StyleZhao, Huijuan, Jiapeng Xu, and Fangfei Li. 2022. "Event-Triggered Extended Kalman Filtering Analysis for Networked Systems" Mathematics 10, no. 6: 927. https://doi.org/10.3390/math10060927
APA StyleZhao, H., Xu, J., & Li, F. (2022). Event-Triggered Extended Kalman Filtering Analysis for Networked Systems. Mathematics, 10(6), 927. https://doi.org/10.3390/math10060927