
Partial Anti-Synchronization Problem of the 4D Financial Hyper-Chaotic System with Periodically External Disturbance


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1).
- The existence of the partial anti-synchronization problem of the 4D financial system is proven;
- (2).
- A suitable filter that can asymptotically estimate the periodically external disturbance is proposed;
- (3).
- Two DE-based controllers are designed and used to realize the partial anti-synchroni- zation problem.
2. Problem Formation
3. Main Results
3.1. The Existence of the Partial Anti-Synchronization Problem
3.2. The Controllers Are Designed for the Nominal System
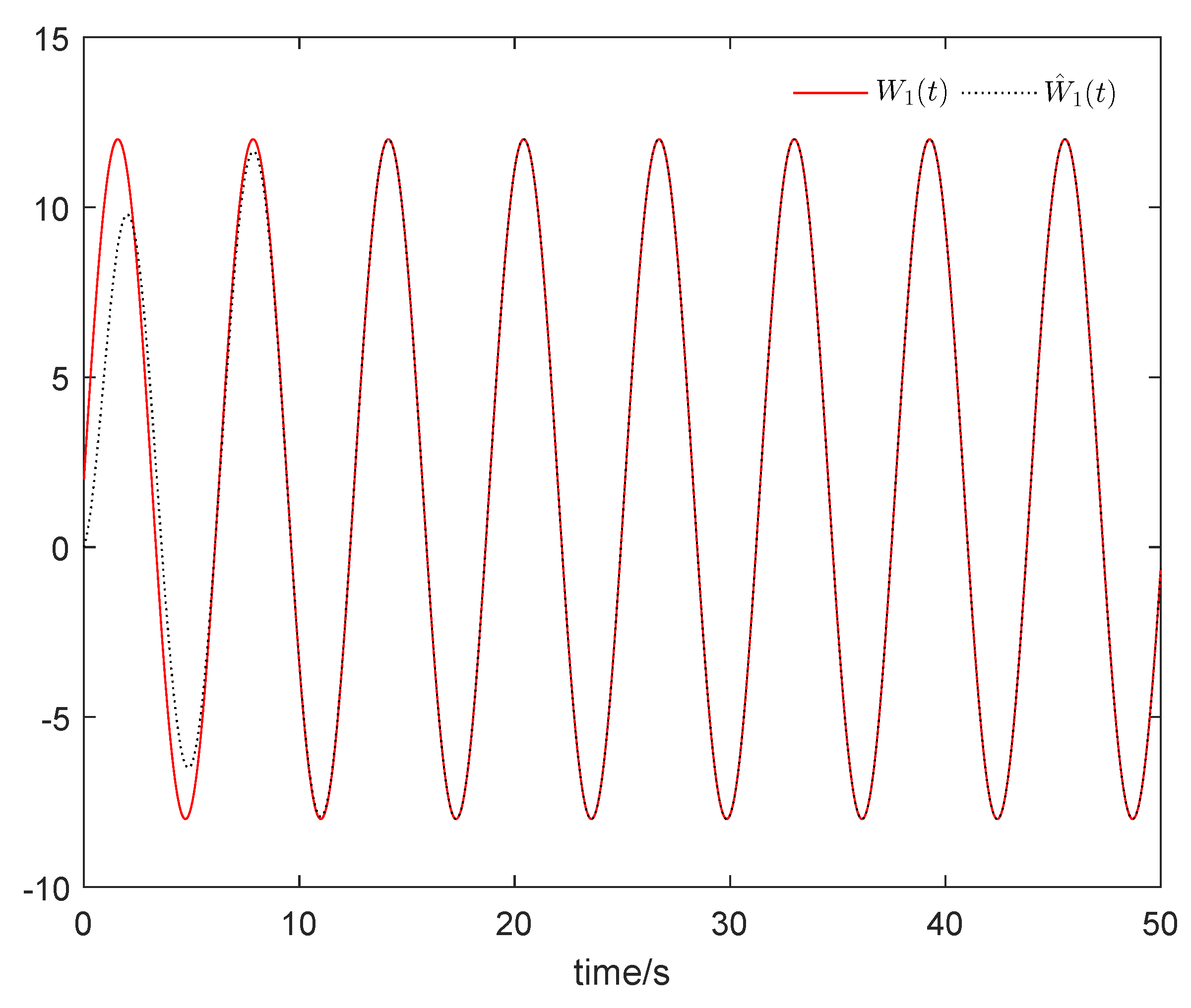
3.3. A Suitable Filter Is Designed for the Periodically External Disturbance
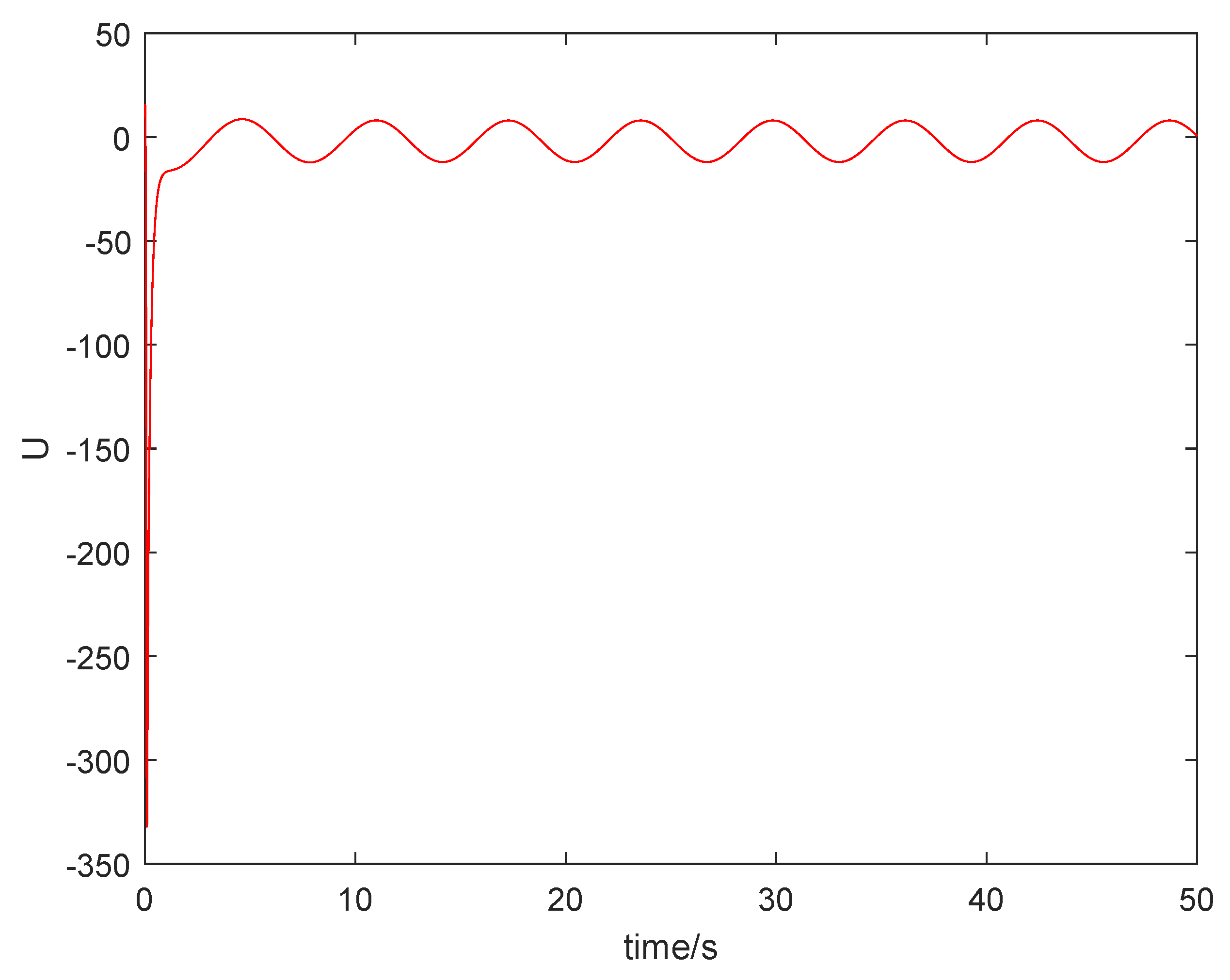
3.4. The DE-Based Controller Is Designed for Periodically External Disturbance
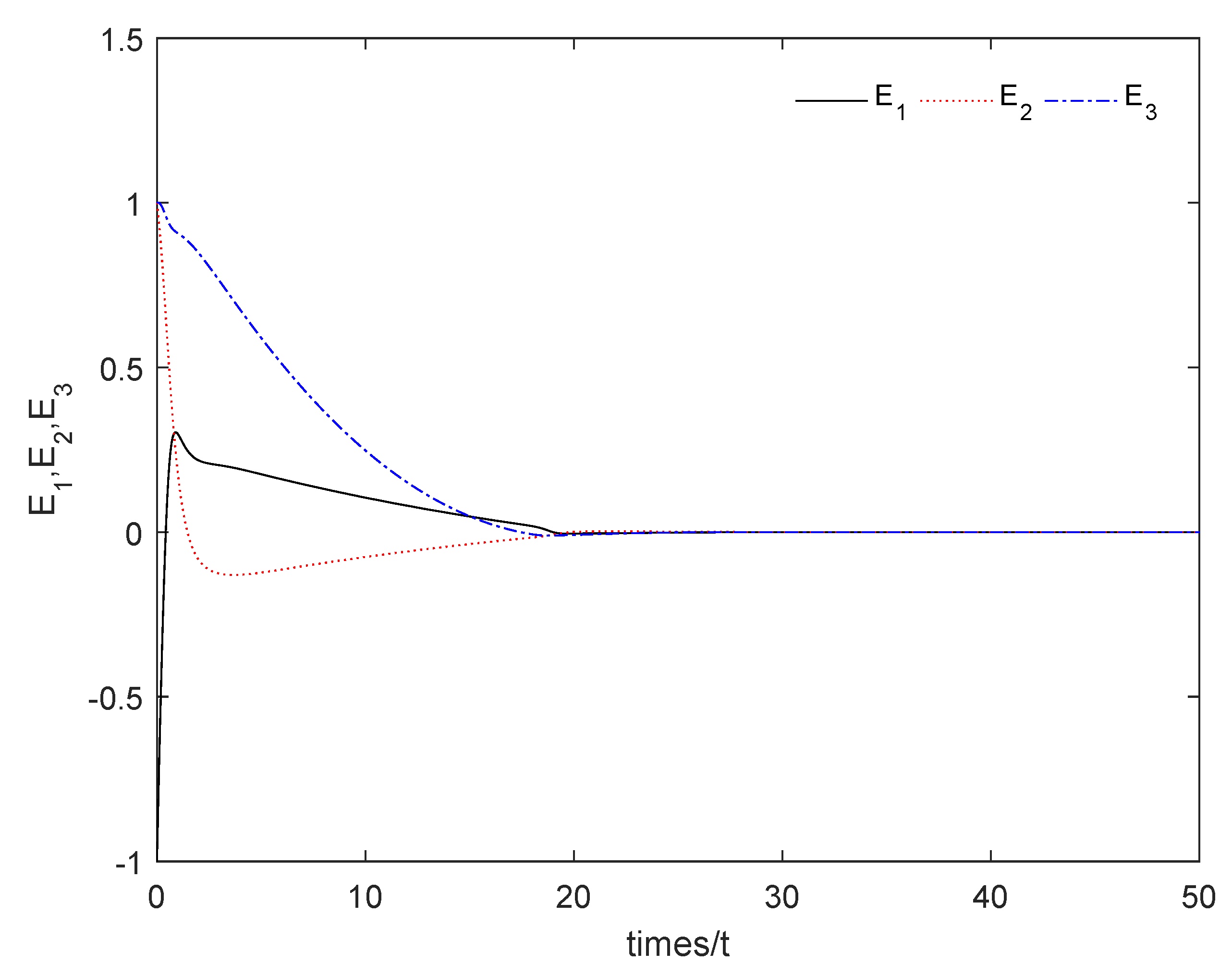
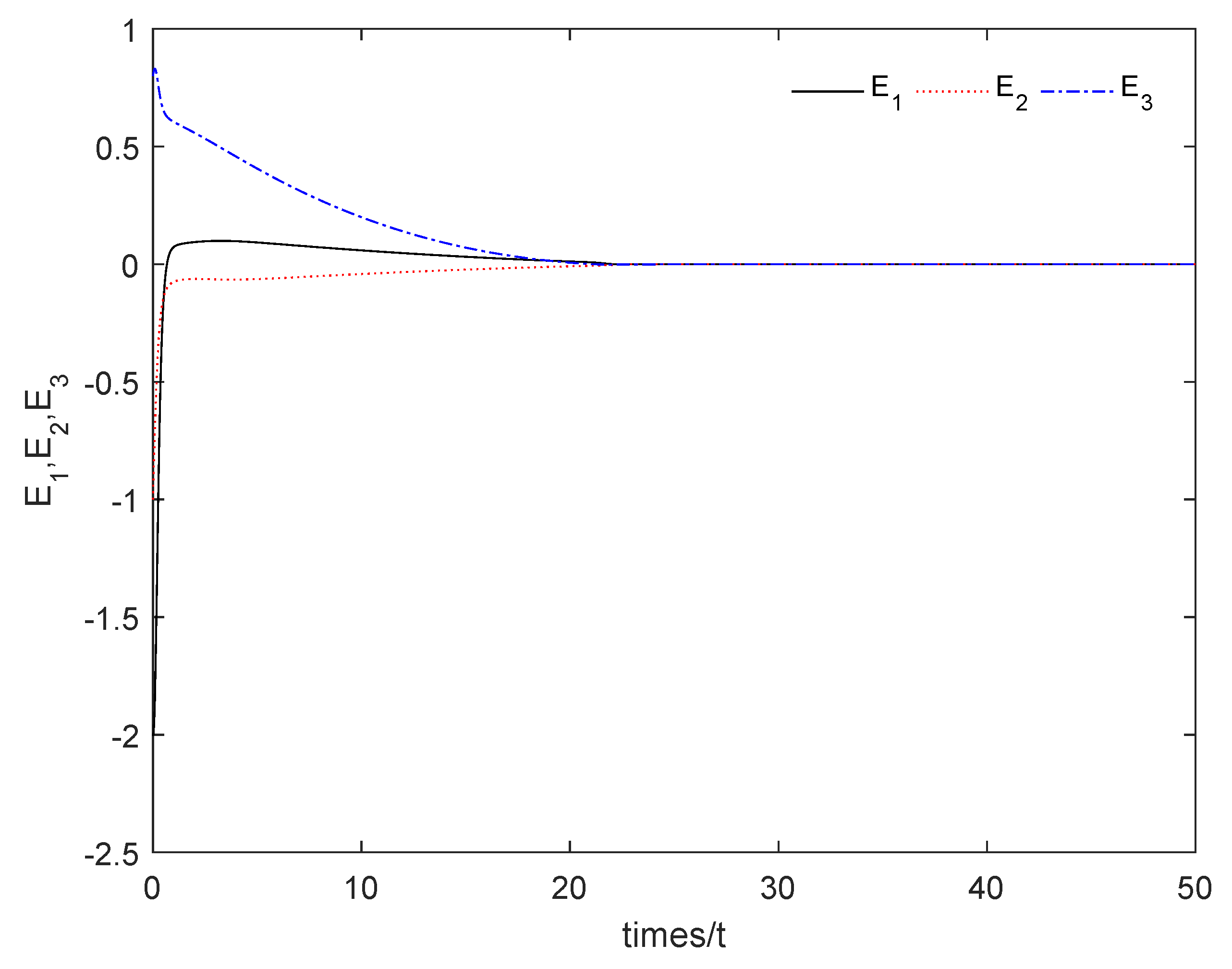
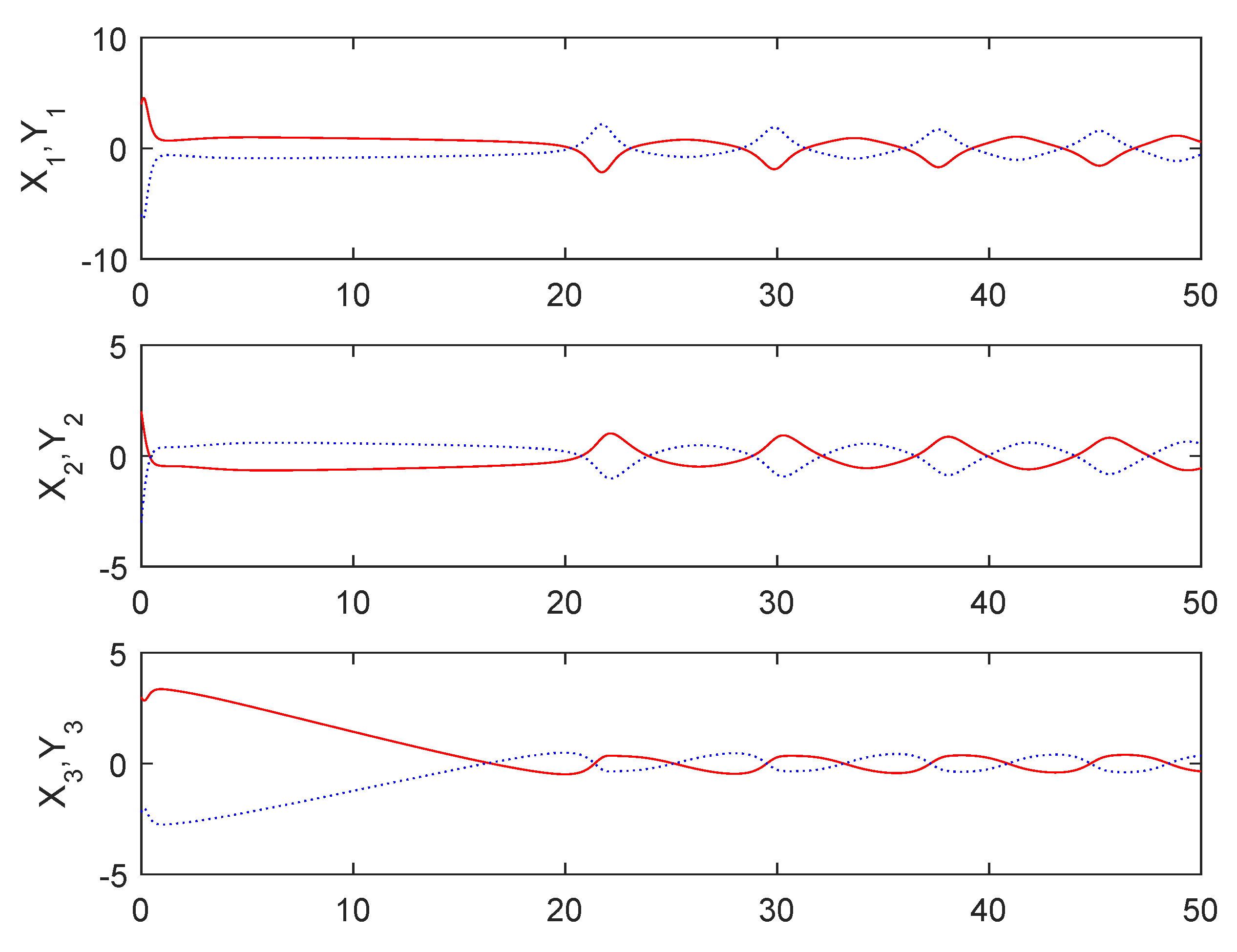
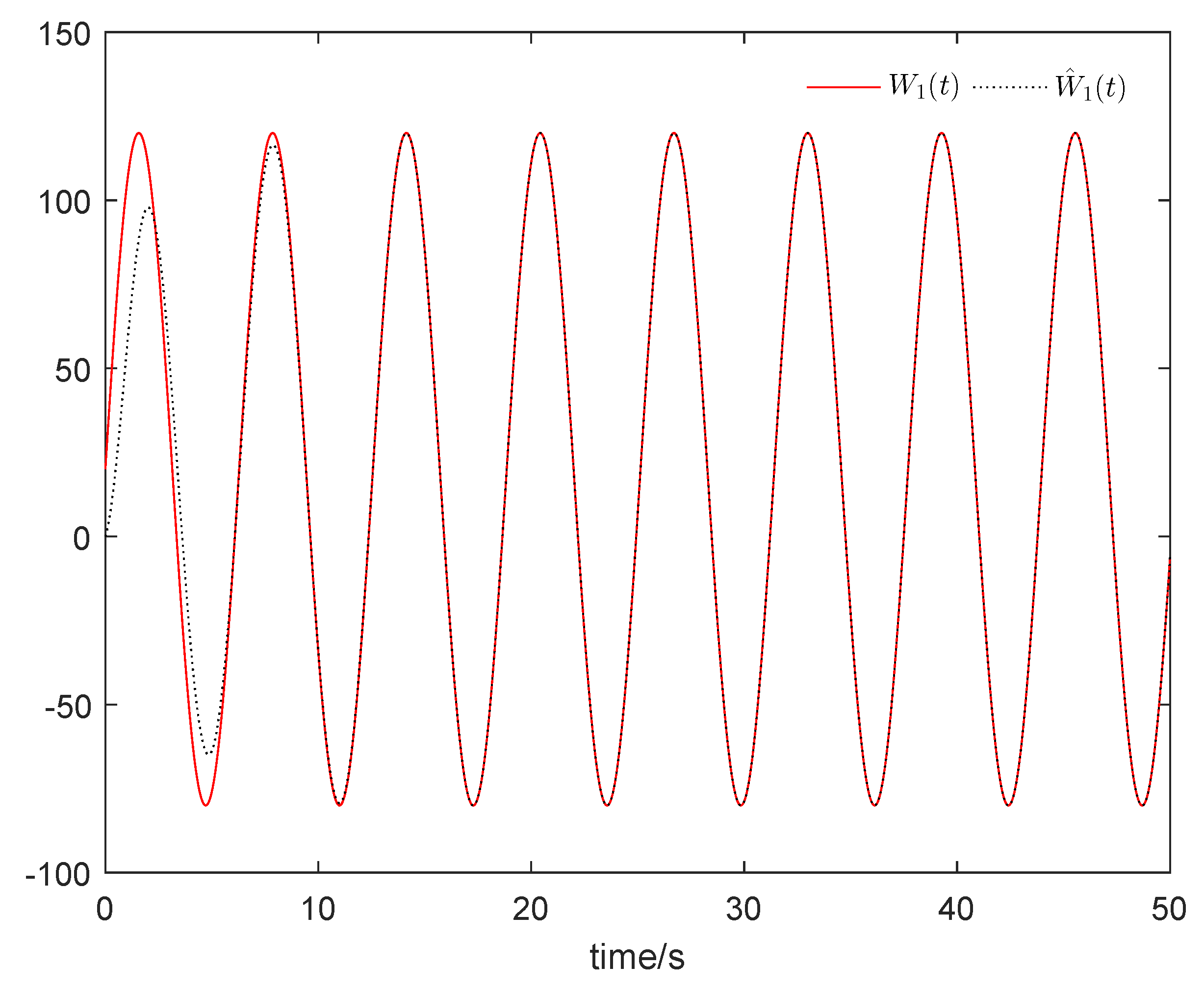
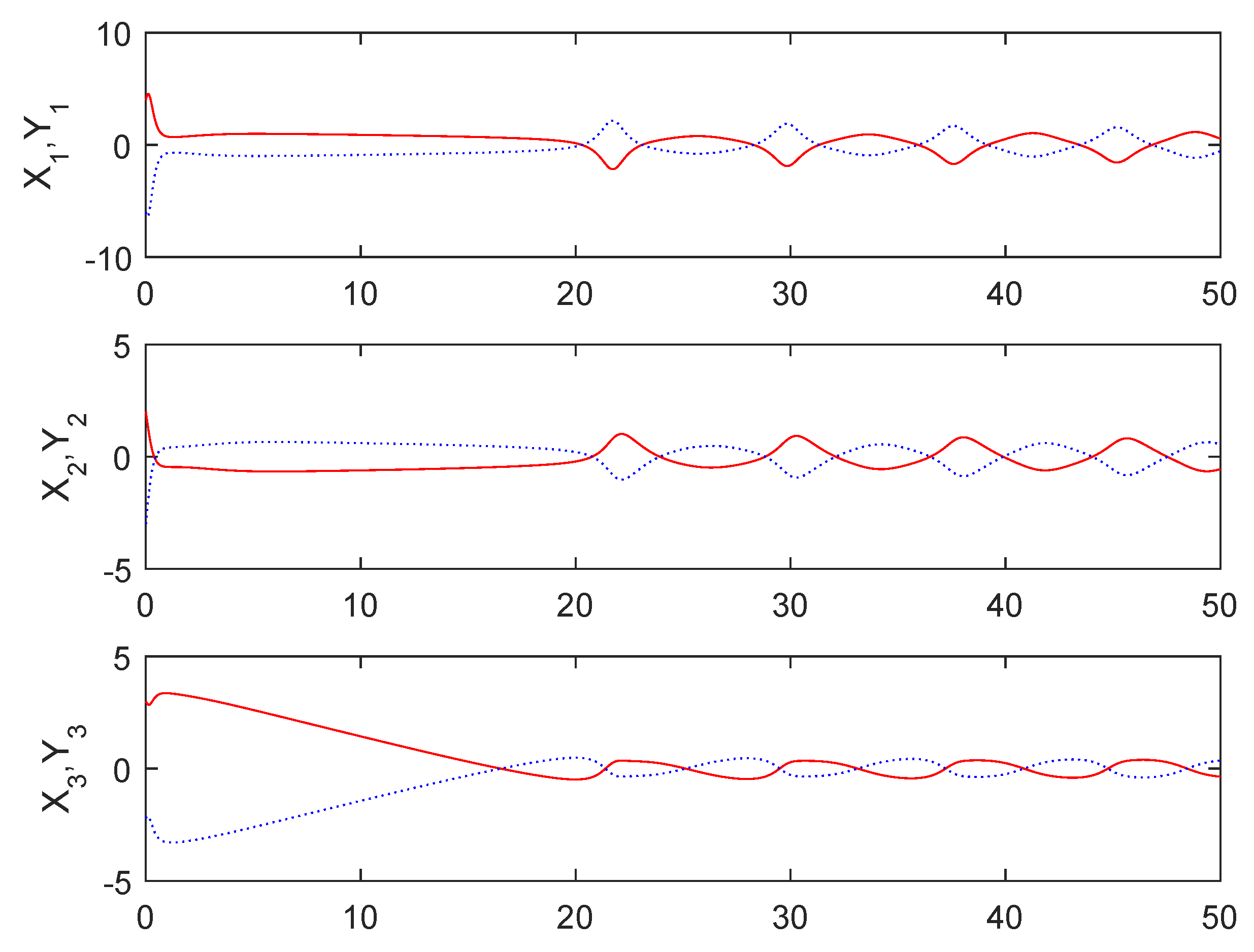
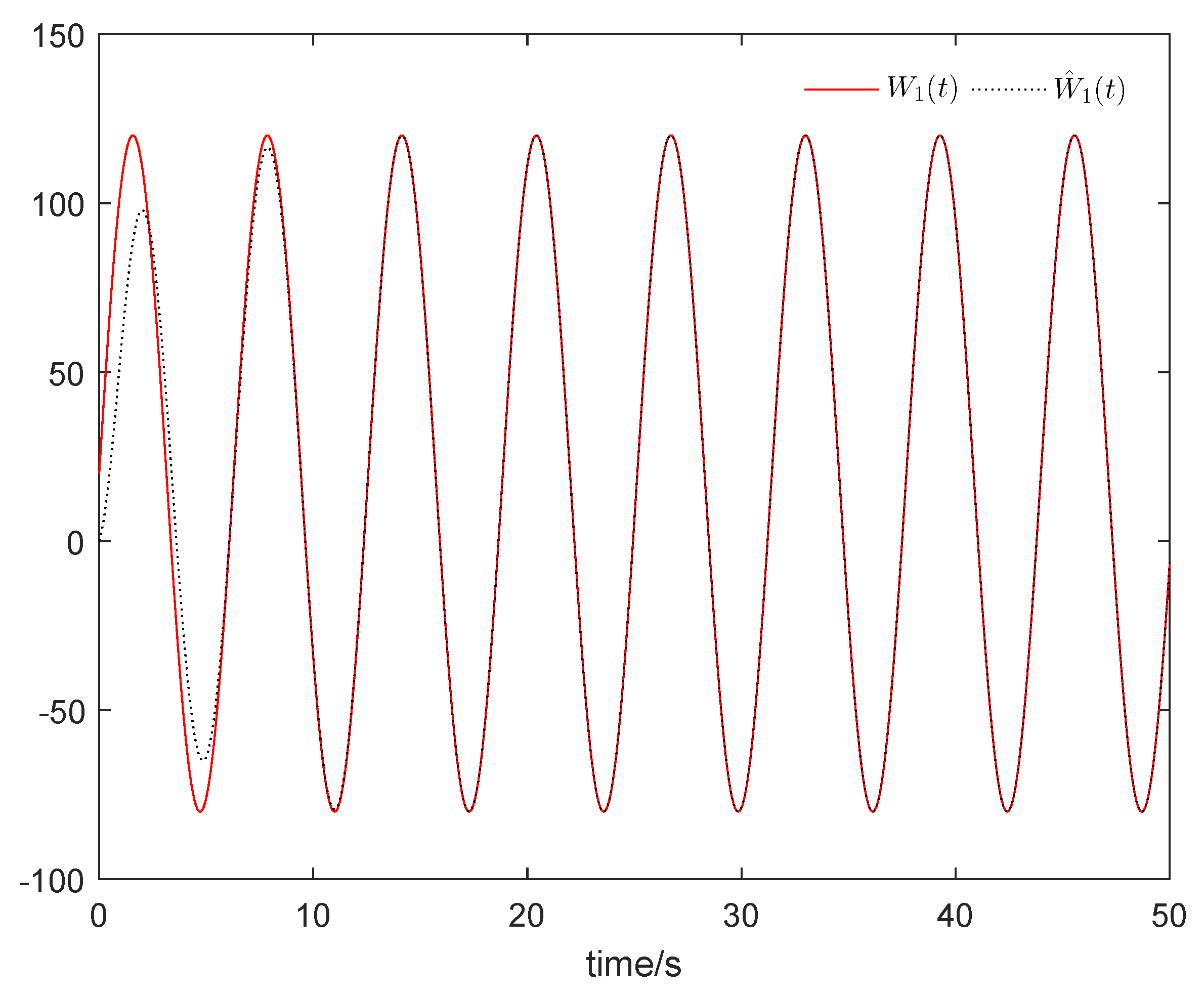
4. Numerical Simulation
4.1. Comparison with the Effect of Parameters of Periodically External Disturbance
4.2. Comparison with the Same Control Strategy
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
Appendix A.1. The Proof of Theorem 1
Appendix A.2. The Proof of Theorem 2
Appendix A.3. The Proof of Theorem 3
Appendix A.4. The Proof of Theorem 4
Appendix A.5. The Proof of Theorem 5
References
- Pecora, L.M.; Carroll, T.L. Synchronization in chaotic system. Phys. Rev. Lett. 1990, 64, 821–825. [Google Scholar] [CrossRef] [PubMed]
- Mainieri, R.; Rehacke, J. Projective synchronization in three-dimensional chaotic oscillators. Phys. Rev. Lett. 1999, 82, 3042–3045. [Google Scholar] [CrossRef]
- Xu, D.L. Control of projective synchronization in chatic system. Phys. Rev. Lett. 2001, 63, 027201–027204. [Google Scholar]
- Park, J.H. Adaptive synchronization of Rossler system with uncertain parameters. Chaos Solitons Fractals 2005, 25, 333–338. [Google Scholar] [CrossRef]
- Jiang, C.; Zhang, F.; Li, T. Synchronization and anti-synchronization of N-coupled fractional-order complex systems with ring connection. Math. Methods Appl. Sci. 2018, 41, 2625–2638. [Google Scholar] [CrossRef]
- Karimov, A.; Tutueva, A.; Karimov, T.; Karimov, T.; Druzhina, O.; Butusov, D. Adaptive generalized synchronization between circuit and computer implementations of the Róssler system. Appl. Sci. 2021, 11, 81. [Google Scholar] [CrossRef]
- Li, R.H.; Xu, W.; Li, S. Anti-synchronization on autonomous and non-autonomous chaotic systems via adaptive feedback control. Chaos Solitons Fractals 2009, 40, 1288–1296. [Google Scholar] [CrossRef]
- Shi, J.C.; Zeng, Z.G. Anti-synchronization of delayed state-based switched inertial neural networks. IEEE Trans. Cybern. 2021, 51, 2540–2549. [Google Scholar] [CrossRef]
- Lu, W.L.; Chen, T.P. QUAD-condition, synchronization, consensus of multiagents, and anti-synchronization of complex networks. IEEE Trans. Cybern. 2021, 51, 3384–3388. [Google Scholar] [CrossRef]
- Wang, Q.; Duan, L. Finite-time anti-synchronisation of delayed Hopfield neural networks with discontinuous activations. Int. J. Control. 2021, 20, 2398–2405. [Google Scholar] [CrossRef]
- Khan, T.; Chaudhary, H. Adaptive controllability of microscopic chaos generated in chemical reactor system using anti-synchronization strategy. Numer. Algebra Control. Optim. 2021, 12, 611–620. [Google Scholar] [CrossRef]
- Wei, X.F.; Zhang, Z.Y.; Lin, C.; Chen, J. Synchronization and anti-synchronization for complex-valued inertial neural networks with time-varying delays. Appl. Math. Comput. 2021, 403, 126194. [Google Scholar] [CrossRef]
- Kaheni, H.R.; Yaghoobi, M. A new approach for security of wireless sensor networks based on anti-synchronization of the fractional-order hyper-chaotic system. Trans. Inst. Meas. Control. 2021, 43, 1191–1201. [Google Scholar] [CrossRef]
- Guo, R.; Qi, Y. Partial anti-synchronization in a class of chaotic and hyper-chaotic systems. IEEE Access 2021, 9, 46303–46312. [Google Scholar] [CrossRef]
- Zhu, L.; Chen, Z. Robust input-to-output stabilization of nonlinear systems with a specified gain. Automatica 2017, 84, 199–204. [Google Scholar] [CrossRef]
- Casau, P.; Mayhew, C.G.; Sanfelice, R.G.; Silvestre, C. Robust global exponential stabilization on the n-dimensional sphere with applications to trajectory tracking for quadrotors. Automatica 2019, 110, 108534. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.; Chen, J. Robust control for a class of nonaffine nonlinear systems based on the uncertainty and disturbance estimator. IEEE Trans. Ind. Electron. 2015, 62, 5881–5888. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, B.; Zhong, Q. Robust power flow control of grid-connected inverters. IEEE Trans. Ind. Electron. 2016, 63, 6887–6897. [Google Scholar] [CrossRef]
- Ren, B.; Zhong, Q.; Dai, J. Asymptotic reference tracking and disturbance rejection of UDE-based robust control. IEEE Trans. Ind. Electron. 2017, 64, 3166–3176. [Google Scholar] [CrossRef]
- Ren, B.; Wang, Y.; Zhong, Q. UDE-based control of variable-speed wind turbine systems. Int. J. Control. 2017, 90, 121–136. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, B. Fault ride-through enhancement for grid-tied PV systems with robust control. IEEE Trans. Ind. Electron. 2018, 65, 2302–2312. [Google Scholar] [CrossRef]
- Yi, X.; Guo, R.; Qi, Y. Stabilization of chaotic systems with both uncertainty and disturbance by the UDE-Based Control Method. IEEE Access 2020, 8, 62471–62477. [Google Scholar] [CrossRef]
- Wang, Y.; Ren, B.; Zhong, Q. Bounded UDE-Based controller for input constrained systems with uncertainties and disturbances. IEEE Trans. Ind. Electron. 2021, 68, 1560–1570. [Google Scholar] [CrossRef]
- Wu, W.; Chen, Z. Hopf bifurcation and intermittent transition to hyperchaos in a novel strong four-dimensional hyperchaotic system. Nonlinear Dyn. 2010, 60, 615–630. [Google Scholar] [CrossRef]
- Yu, H.; Cai, G.; Li, Y. Dynamic analysis and control of a new hyperchaotic finance system. Nonlinear Dyn. 2012, 67, 2171–2182. [Google Scholar] [CrossRef]
- Cai, G.; Hu, P.; Li, Y. Modified function lag projective synchronization of a financial hyperchaotic system. Nonlinear Dyn. 2012, 69, 1457–1464. [Google Scholar] [CrossRef]
- Cao, L. A four-dimensional hyperchaotic finance system and its control problems. J. Control. Sci. Eng. 2018, 4976380, 1–12. [Google Scholar] [CrossRef]
- Guo, R. Projective synchronization of a class of chaotic systems by dynamic feedback control method. Nonlinear Dyn. 2017, 90, 5593–5597. [Google Scholar] [CrossRef]



Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, L.; Guo, R. Partial Anti-Synchronization Problem of the 4D Financial Hyper-Chaotic System with Periodically External Disturbance. Mathematics 2022, 10, 3373. https://doi.org/10.3390/math10183373
Cao L, Guo R. Partial Anti-Synchronization Problem of the 4D Financial Hyper-Chaotic System with Periodically External Disturbance. Mathematics. 2022; 10(18):3373. https://doi.org/10.3390/math10183373
Chicago/Turabian StyleCao, Lin, and Rongwei Guo. 2022. "Partial Anti-Synchronization Problem of the 4D Financial Hyper-Chaotic System with Periodically External Disturbance" Mathematics 10, no. 18: 3373. https://doi.org/10.3390/math10183373
APA StyleCao, L., & Guo, R. (2022). Partial Anti-Synchronization Problem of the 4D Financial Hyper-Chaotic System with Periodically External Disturbance. Mathematics, 10(18), 3373. https://doi.org/10.3390/math10183373