1.1. Background
A basic shock reliability system includes a complex device subject to continuous degradation (or aging or decay) due to natural wear. The system becomes inoperative when its key function is disabled. This can be specified through a real-valued degradation process and a sustainability threshold M that crosses sooner or later.
In addition, the system is assaulted at random times by shocks of random magnitudes that accelerate the system wear. It is likely that the system’s operation gets compromised due to one of such shocks sooner than system’s natural aging. Furthermore, the impact of the shocks can be felt on some other components of the system in the form of
It stands for reason to interpret such system by a series of two (or more) components, so that the fatality of any of them deactivates the entire device. In a nutshell, the system natural wear represented by process
is intertwined with
referred to as
soft shocks that accelerate the overall aging. The latter is formalized by the continuous time parameter process
where
is the indicator function of a set
A. Thus, the system “perishes” if its first component completely deteriorates through
crossing
M at some time
t. Its second component is stricken by hard shocks
at the same times
as soft shocks
hit the first component. So the second component can be knocked down by one such hard shock that also disables the system. Now the system can fend off itself of most such dangerous attacks with no damage. However, one such hard shock can become fatal to the system if it is stronger than the system can handle. More specifically, a hard shock
is
fatal to the system if
(a fixed threshold). An embellished variant of this scenario is when only after the component is hit by
such shocks does the system fail. In such case, the associated hard shocks are called
critical. When
, a critical shock is called
extreme.
One can think of an electrical system, under occasional surges, that is being relatively safe under the protection of a surge guard. However, one or several such surges can circumvent the guard not only by knocking it down but severely damaging the electrical grid that will require a substantial repair or be beyond repair. As mentioned, a single fatal hard shock is also referred to as an extreme shock and an associated reliability model is called an extreme shock model. Yet with N hard shocks needed to incapacitate the system, all are referred to as critical and the corresponding model is referred to as N-critical shock model.
There are different terminologies in the reliability literature, often synonymous. We would like to bring at least some of them together, along with other terms borrowed from fluctuation theory, and apply them to a generic serial system of two components. Hence, the system fails when so does at least one of its two components. Now the system we will deal with is as follows.
The system ages according to an affine or linear deterministic process is a constant slope.
Component 1 is periodically hit by soft shocks at times
of magnitudes
whose impact is
cumulative. The latter means that every soft shock will escalate the wear of the device until its total damage combined with aging will top sustainability threshold
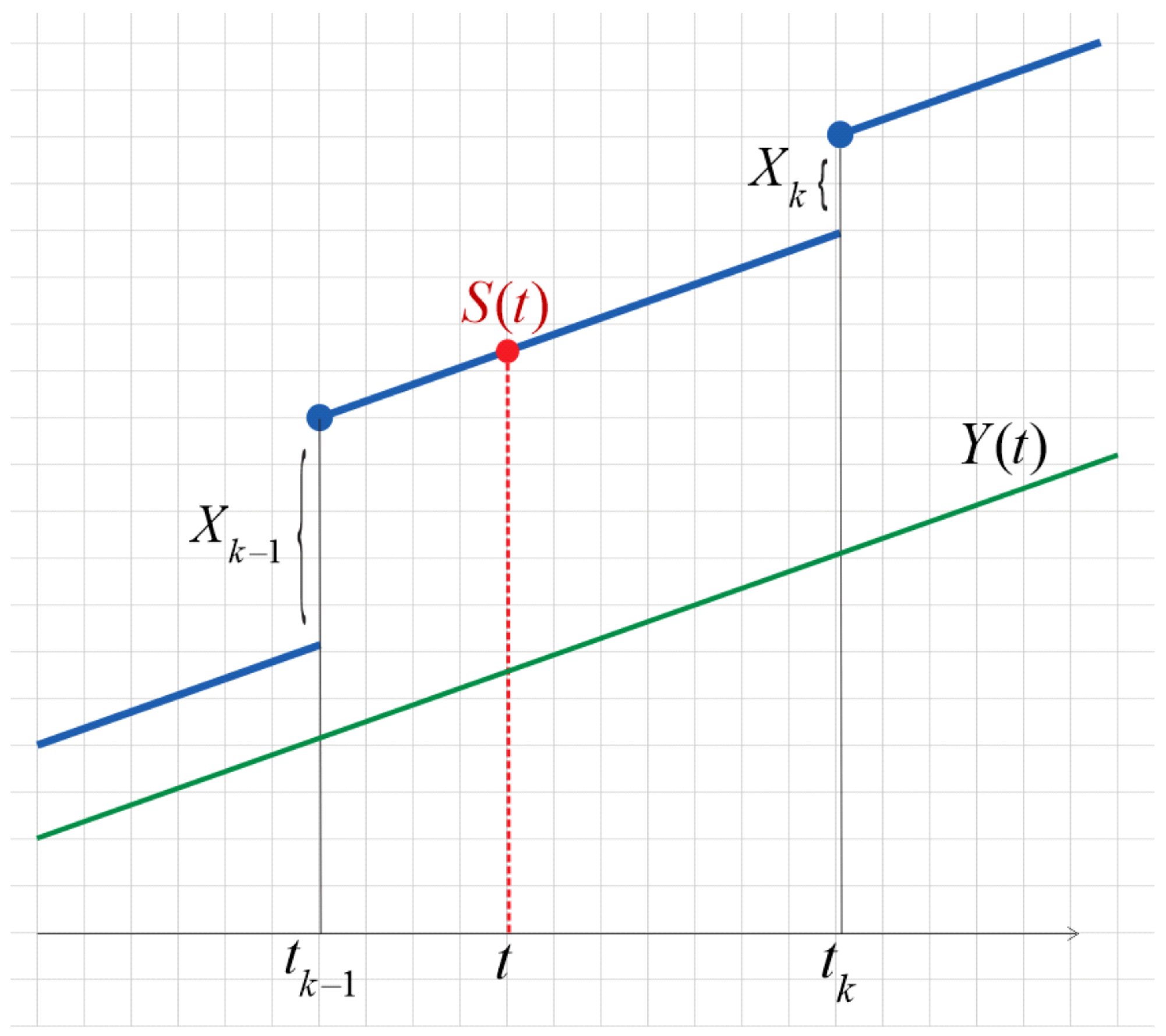
M. The associated continuous time parameter process
describing the fatigue of the system at time
is
where
is the indicator function of a set
A. Component 1 and thus the system fails when one of two events occurs:
- (a)
at some t while for all called a wear failure
- (b)
, while for all called cumulative failure
Either type of failure is called soft. Note that if while for shock is called fatal. The first shocks are then nonfatal.
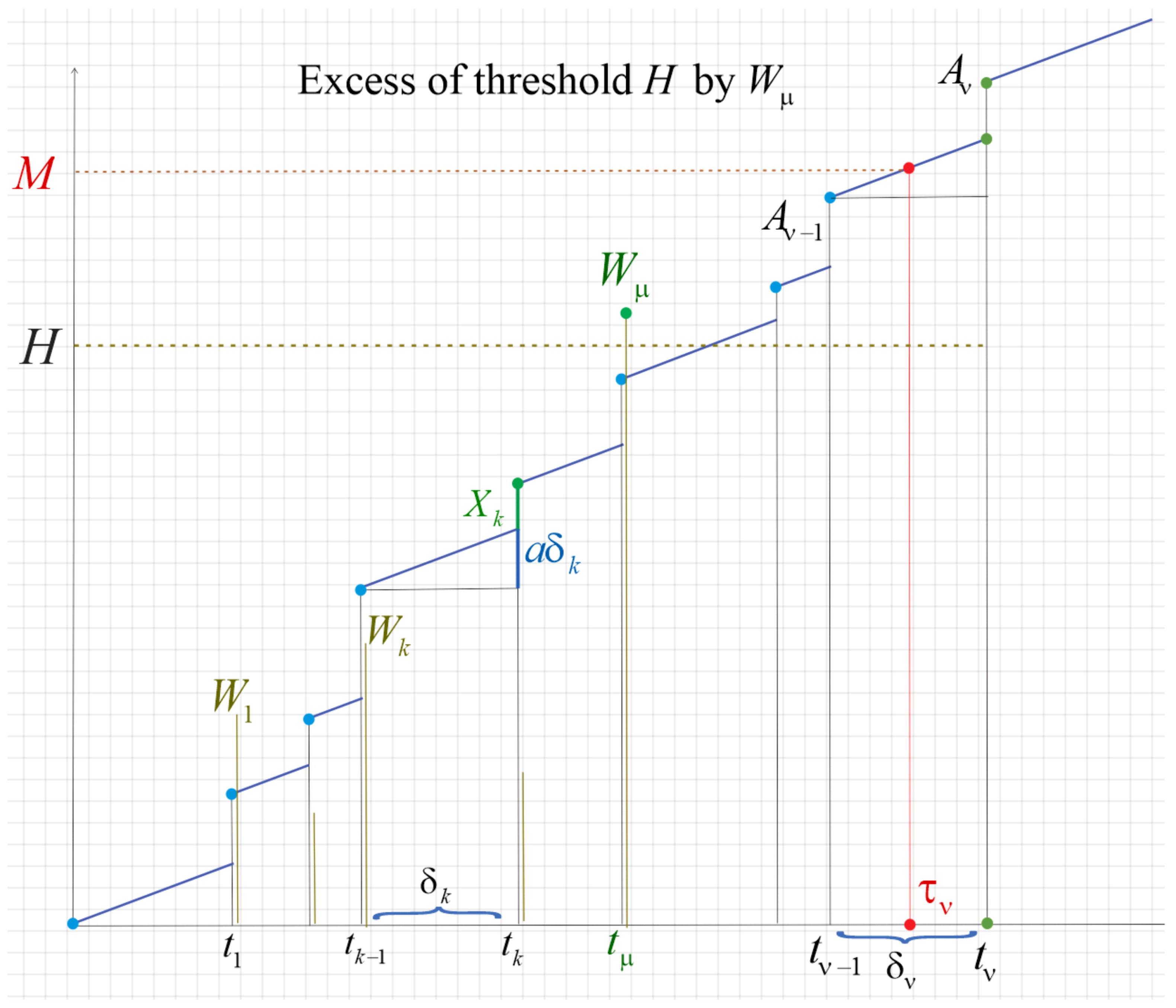
Component 2 is hit by hard shocks at the same times but with different upshots. Assume that those shocks hitting Component 2 with their respective magnitudes normally cause no damage unless one of them exceeds a critical threshold H. In this case, it knocks the component and thus the system down representing an unsustainable surge. Obviously, such a hit is also fatal, but it is referred to as extreme. Once the system becomes inoperative through an extreme shock, its failure is called extreme failure (as opposed to the cumulative or wear failure of Component 1). It is also called a hard failure and we call the associated hard shocks to tell them from soft shocks. Consequently, not all hard shocks are fatal, just the one in excess of threshold H.
As mentioned, an upgrade to the extreme failure model is an N-critical failure model, when its component breaks down after being hit by N critical shocks exerted in no particular order. A hard shock is critical if . Thus, if after being hit times by there are N critical shocks from among the total of shocks and the system fails at time (unless it fails earlier for other reasons). This last shock becomes also fatal. More restrictively, if system’s failure requires all critical shocks to arrive sequentially, the corresponding model is called a run shock model.
Because aging, soft and hard shocks
compete with each other, we proceed with further formalism from fluctuation theory. Let
Then, is the shock failure index. As mentioned, the system failure can occur even earlier at some time when due to aging and accumulated shocks combined, but not due to a single shock (meaning it is a mere wear failure). It is convenient to combine the two situations in one using random time which is either or some when . The system is rendered inoperative at the time-to-failure being and consequently, the exit from its operational mode can be regarded as the end of a game of “three players” often alluded so in the literature by referring it to as a competition of several failure processes. Note that is also referred to as the lifetime of the system. So, in a nutshell, is the time-to-failure, or lifetime of the system, or also the first passage time of the combined aging, cumulative, and extreme failure process.
The above-mentioned N-critical failure model is more convenient to describe by an auxiliary sequence of binary r.v.’s (random variables) defined as . So the -index is then with the rest identical to that in 5.
In this paper, we target the following characteristics that we deem imperative in the statistical assessment of our system. We verbalize them in this section and then state the problem rigorously in
Section 2. We predict the life time of the system and the detriment of the damage to either component upon the exit. Furthermore, we also predict the pre-failure time
and status of the system
at time
. This information can help take preventive measures ahead of the exit at
or
.
Many authors cited below investigate similar systems, but they use different techniques and many target various probabilistic characteristics of underlying systems. We will mention how they relate to our work. The most common term for our model and many similar models is a mixed reliability system. In a nutshell, such classes of mixed reliability systems include aging, typically continuous aging driven by a stochastic process (like gamma or Brownian motion) or a linear process , where slope a is a random variable. The system is hammered by a bivariate marked Poisson process of shocks arriving at and forming an ordinary or nonhomogeneous Poisson point process. Marks can be position -dependent or position-independent. The marks themselves are most often independent of each other. The marked process of shocks can also be general renewal (as it is the assumption in our paper) and with position-dependent marking or as complex as a Markov renewal process.
1.2. Relevant Work
Cha and Finkelstein [
1] in 2011 studied a mixed model with cumulative and extreme shocks, non-homogeneous Poisson process of shocks, and no ageing. Each shock at time
t is fatal or not fatal with probabilities
and
respectively. Other setting is the critical shocks become fatal when their total number exceeds
N.
N can also be random.
In 2021, Bian et al. [
2] considered a multi-component system subject to competing failure processes, so that the degradation function of the
ith component is
where the slope
is a Gaussian r.v. Besides, the
ith component is also hit by hard shocks
and it is knocked down when one of them exceeds
. The hard shocks form a nonhomogeneous Poisson point process with multivariate marks.
Cao et al. [
3], in their 2020 paper, studied an aging system under soft and hard shocks arriving in accordance with an ordinary Poisson process with a constant rate. Cumulative aging is integrated with internal shocks and degradation
. The extreme failure threshold is time-dependent.
In 2022, Che et al. [
4] studied a system under natural aging (machine degradation), soft shocks (human errors), and hard shocks arriving according to a Poisson process.
In 2021, Li et al. [
5] proposed an interesting mixed system that can be applied to satellites or various spacecraft. The lifetime of the phased mission systems can be separated into several phases, in which their tasks, system configurations, and failure criteria are different. Shocks are due to radiation from outer space and they cause an additional wear and fatal damage to electronic devices in these systems. The authors modeled the system by a Markov regenerative process. More specifically, the self-wear linear process is
(
), additional wear is cumulative driven by iid (independent and identically distributed) Gaussian r.v.’s, external damages (extreme) are due to iid Gaussian r.v.’s. Both are independent. Shocks follow an ordinary Poisson process.
In 2021, Lyu et al. [
6] modeled a mechanical system with degradation, soft and hard shocks under a linearly decreasing threshold.
In 2020, Meango and Ouali [
7] studied a mixed system with cumulative and extreme failures. Shocks arrive according to a Poisson process.
In 2014, Mercier and Pham [
8] studied a variant of hard shocks that are fatal or not fatal by means of Bernoulli trials rather than in association with threshold’s crossings. The system carried aging and soft shocks and all three competed with each other. The authors offered the interpretation of a two-component serial system as in our description above. The lifetime of the first component is characterized by its intrinsic hazard rate, whereas the wear of the second component—by a gamma process. The lifetimes of the two components are dependent through a nonhomogeneous Poisson process of shocks. A shock is fatal with probability
and with probability
it is nonfatal. The authors calculated the system reliability.
In 2018, Peng et al. [
9] introduced a generalized extreme shocks reliability system where shocks increase the degradation rate when their values exceed a critical threshold. The aging process involves Brownian motion process.
In 2020, Wang et al. [
10] considered an interesting applied reliability system with aging and a shock process motivated by the wear process of a micro engine of micro electromechanical system. The failure is manifested by the visible wear of the rubbing surfaces between the gear and the pin joint modeled by a linear degradation path model. The wear is primarily caused by the mechanism’s aging, while shock tests on micro engine reveal that shock loadings may cause substantial wear debris among the gear, the pin joint, and the fracture of springs. The micro engine fails if the shock imposed on it exceeds a critical value. In this sense, shocks were produced by the external environment, and their arrival rate was not affected by the degradation state. As the wear accumulates, the micro engine becomes more vulnerable and its resistance to shocks decreases. Therefore, the thresholds for distinguishing shocks in safety zone, damage zone, and fatal zone had to be decreased accordingly.
The natural wear is modeled by , where a is a r.v.—the rate for the degradation path. Shocks arrive according to a Poisson process with rate . They are divided into safety, damage, and fatal zones according to their random magnitudes , (). If the magnitude of a shock is below the safety threshold , the shock does not affect the natural degradation progression. If the magnitude of a shock is beyond the fatal threshold , it will cause a failure immediately. And a shock with its magnitude between these two thresholds will bring cumulative damage to the natural degradation process. Altogether, the system modeled by a combination of an aging process and shocks identified as harmless, soft, and extreme depending on their position within the three zones induced by .
A somewhat analogous setting was rendered earlier in Eryilmaz [
11] in 2015. A system is hit by random shocks. Let
and
be two critical thresholds such that
. A shock with a magnitude between
and
causes a partial damage to the system, and the system moves into a lower partially working state decreased by one unit upon the occurrence of each shock in (
). A shock with a magnitude above
is extreme and causes a complete failure. Such a shock model creates a multi-state system having random number of states. The authors target the lifetime, the time spent by the system in a perfect functioning state, and the total time spent by the system in partially working states along with their survival functions. The interarrival times between successive shocks follow phase-type distribution.
In 2021, Wu et al. [
12] studied an
N-critical shock model. The critical shocks
arrive in accordance with a semi-Markov process and Markov-dependent arrival process
. Recall that a shock is critical if it crosses some
H. The system fails if the total number of critical shocks reaches
N. The time-to-failure of the system which is the time from 0 to the
Nth critical shock is targeted.
Yousefi et al. [
13] in 2019, studied a series system with
n components, each subject to degradation and hard shocks. The magnitudes of shocks exerted to each particular component are iid Gaussian r.v.’s. The shocks arrive simultaneously to all components according to a marked Poisson process
of rate
and its support counting measure
with position-independent marking. The system ages according to the gamma process
with shape parameter
and scale parameter
.
1.2.1. Other Relevant Shock Models
Most shock models fall into one of the five classes: cumulative shock models, extreme shock models, -shock models, run shock models, and mixed shock models. A mixed shock model must be a combination of at least two of the first four types.
A -shock model is of the system that fails when the time lag between two consecutive shocks becomes less than some . -shock policy is often implemented whenever shock damages are hard to observe.
In 2018, Hao and Yang [
14] considered a system that fails due to a competition of soft and hard failures. Soft failure happens when the cumulative degradation along with soft shocks cross a critical threshold. A hard failure is modeled according to variable hard failure thresholds as a combination of extreme and
-shocks. The continuous degradation process
is linear and shocks arrive following a homogenous Poisson process with a constant rate
.
Kus et al. [
15], in 2021, studied a mixed shock model which combines
-shock and extreme shock models considering a class of matrix-exponential distributions for inter shock times. The lifetime (time-to-failure) of the system does not have matrix-exponential distribution, but it is approximated by a matrix-exponential distribution. They also obtained the reliability function of the system.
1.2.2. Run Shock Models
Input of shocks is specified by a marked point process
, with
being interarrival times of the shocks. Such a system was introduced and studied by Mallor and Omey [
16] and Mallor and Santos [
17], with the failure of the system defined as follows. Given a
critical region, let
be a
critical run in a string of
k critical shocks that cause the failure of the system, with the failure time
.
Eryilmaz and Tekin [
18] considered a system with input of shocks being a marked point process with and without position dependence. They introduce two thresholds,
such that
The failure time is . No assumption is made on the nature of that point process. They found a closed formula for the probability distribution for having a phase type distribution, and for the special case of being of a phase type and the point process with position-independent marking, the failure time was proved to be of a phase type.
1.3. Studied Reliability System
In the present paper, our degradation process is linear or affine with a constant or random
degradation rate, soft and
N-critical soft shocks. (We discuss an embellishment of the system with
N being random.) We allow the input process of shocks to be marked renewal with position-dependent marking. The present system is a weighty generalization of our recent 2021 paper that studied only a cumulative shocks and degradation system [
19].
We study a rather general reliability system. It includes the natural wear and a bivariate marked renewal process of soft and critical shocks. All three attributes (aging, soft shocks, and critical shocks) lead to system’s failure. Most likely one of the three fatalities comes first and thus we can regard it as a game of three players, of which one wins the game when this player is the first to crash the system. We also relax our assumptions on critical shocks allowing N of them (rather than just one) to impair the system, where . When , a single critical shock is called extreme.
Furthermore, we employ a novel technique to solve the problem, namely an embellished variant of fluctuation analysis and discrete-continuous operational calculus developed in our earlier work [
20,
21,
22]. It allowed us to obtain explicit analytic formulas that stay in contrast to other results that rely on algorithms or asymptotics. The key benefit of our method lies in its easier control implementation.
1.3.1. More Details on Used Techniques
Our techniques fall into the category of fluctuation theory in the context of random walk processes. However, our version of random walk is different from a classic one where a walker moves along a rectangular deterministic grid. There are none of these. First off, the grid is not rectangular, and secondly, it is random. The random walk (rather a doubly random walk) interpretation lies in its setting of the escape time from the bounded set and the position of the walker upon escape from .
This is a novel model in the context of random walks and new identification of reliability models as random walks. Secondly, we apply and embellish the theory of fluctuations to arrive at analytically closed formulas for the main functional that carries the joint probability distribution of the first passage time and the position of walker or escape location associated with the failure time and the extent of the overall damage, respectively. Discrete-continuous operational calculus developed in our past work is a main feature of our method.
Note that estimating the time and excess level when crossing thresholds
M and
H by a bivariate piecewise constant jump process alone has been established in our past work on fluctuations of stochastic processes (Dshalalow [
20] in 1997, Dshalalow [
21] in 2005, and Dshalalow and White [
22] in 2021), but its combination with the aging process poses more challenge. In the context of random walk, here the associated grid is not rectangular (nor is it deterministic). In 2021, Dshalalow and White [
19] made one such step considering aging and soft-shocks process combined. In the present setting, there is yet another component representing critical shocks that need to hit the underlying device
N times to knock it down. Our approach allows further embellishments by attaching other types of shocks.
1.3.2. Paper’s Layout
The paper is organized as follows. In
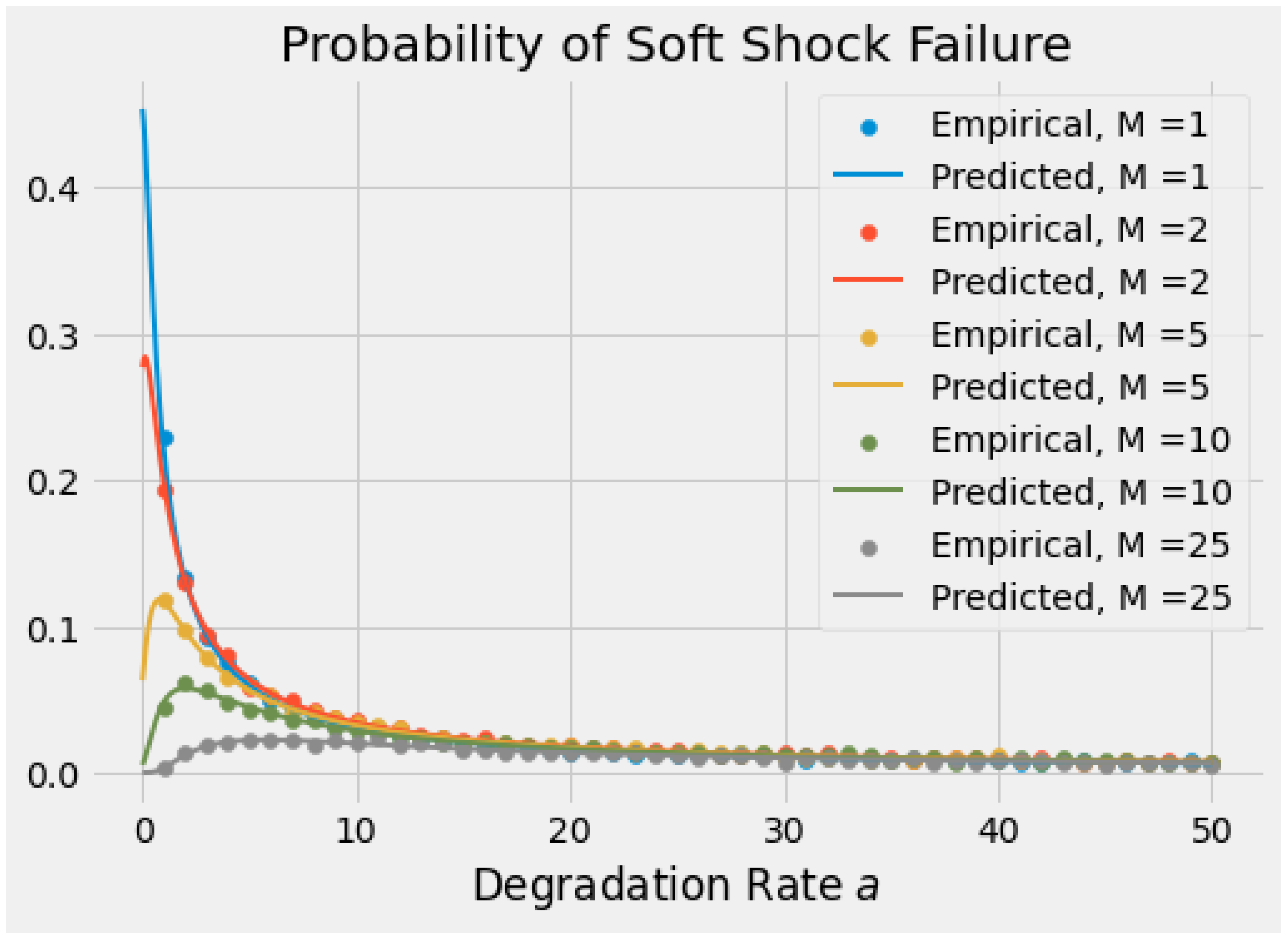
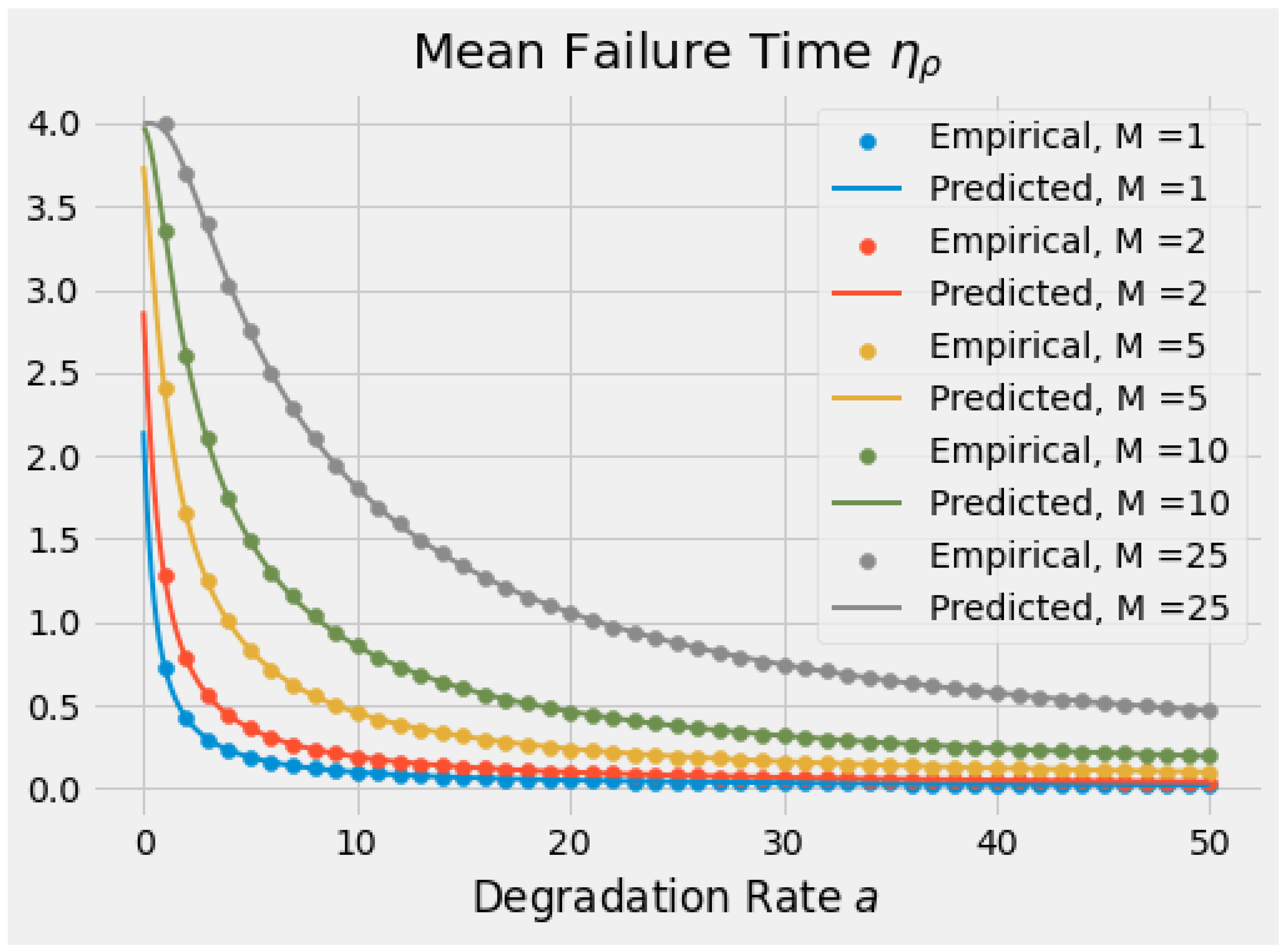
Section 2, we formalize the system. We use and further develop fluctuation theory, along with operational calculus to obtain a closed form functional of the joint distribution of the time-to-failure and the detriment of the damage to the system, among other useful characteristics. To warrant our claim of closed-form expressions we reduce them to fully tractable special cases that we then compute, all in
Section 3, and validate through simulation in
Section 4.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}