
Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure



.jpg)
Abstract
:1. Introduction
- Power: , which for leads to a Gnedenko–Weibull distribution of the system components’ lifetime:
- Its special case is a linear one , with ; the foregoing is known as the Rayleigh density function;
- Logarithmic: , etc.
- After the i-th failure (failure of the i-th component), all surviving components “age” for some time , which corresponds to a jump in the components’ hazard rate function with the value of its shift to the time taking place. In terms of the system components’ hazard rate function, this means that on the semi-interval between the i-th and -th failures, the components’ hazard rate function has the form
- At the i-th failure (failure of the i-th component), the aging of surviving components accelerates with some coefficient . In terms of the components’ hazard rate function, this means that after the failure of the i-th component, it is multiplied by the corresponding coefficient :
- At the i-th failure (failure of the i-th component), the lifetime of the surviving components accelerates with some coefficient . In terms of the components’ hazard rate function, this means that after the i-th failure, it takes the form
- At the i-th failure (failure of the i-th component), the lifetimes of all surviving components instantaneously decrease for some value . In terms of the components’ hazard rate function, this means that after the i-th failure, it makes a jump in the value of and takes the form
2. The Problem Set and Notations
- -
- Reliability function;
- -
- Mean lifetime;
- -
- Variance and coefficient of variation.
3. Calculation of the Residual System Reliability Function after the Failure of Any of Its Components
3.1. Main Results
- the initial set of components;
- the time of the first failure, the number of the first failed component, ;
- Analogously by induction, the moment of the l-th failure, the number of failed components in this time, and the set of components remaining in operation (surviving) after this step:
- -
- The failed component leaves the set of working ones, ;
- -
- The hazard rate function of components is replaced by .
- 1.
- The conditional (with respect to the l-th component’s failure time ) reliability function of any of the surviving components equals:
- 2.
- The lifetimes of survival after the l-th failure components are conditionally independent (with respect to the moment of time ), and their joint reliability function for any is determined as follows:
- 3.
- The conditional reliability function of a system after the l-th failure (with respect to its failure time ) equals:
3.2. The General Procedure of System Reliability Function Calculation
| Algorithm 1: General algorithm for calculation of reliability function |
Beginning. Determine: integers , real ; distribution of components lifetime and/or their hazard rate function , as well as the procedure of their changing after system component failure. Step 1. Put , and according to (2), calculate the reliability function up to the first failure time and : Step 2. For l from 1 to , calculate
Step 3. Taking into account Expression (8), the conditional system reliability function of the next failure time for equals
Calculate its unconditional form: Step 4. For , the needed system characteristics will be found;
Stop. |
3.3. An Example: 2-out-of-n System
3.3.1. Exponential Distribution, by Algorithm 1
3.3.2. Markov Case
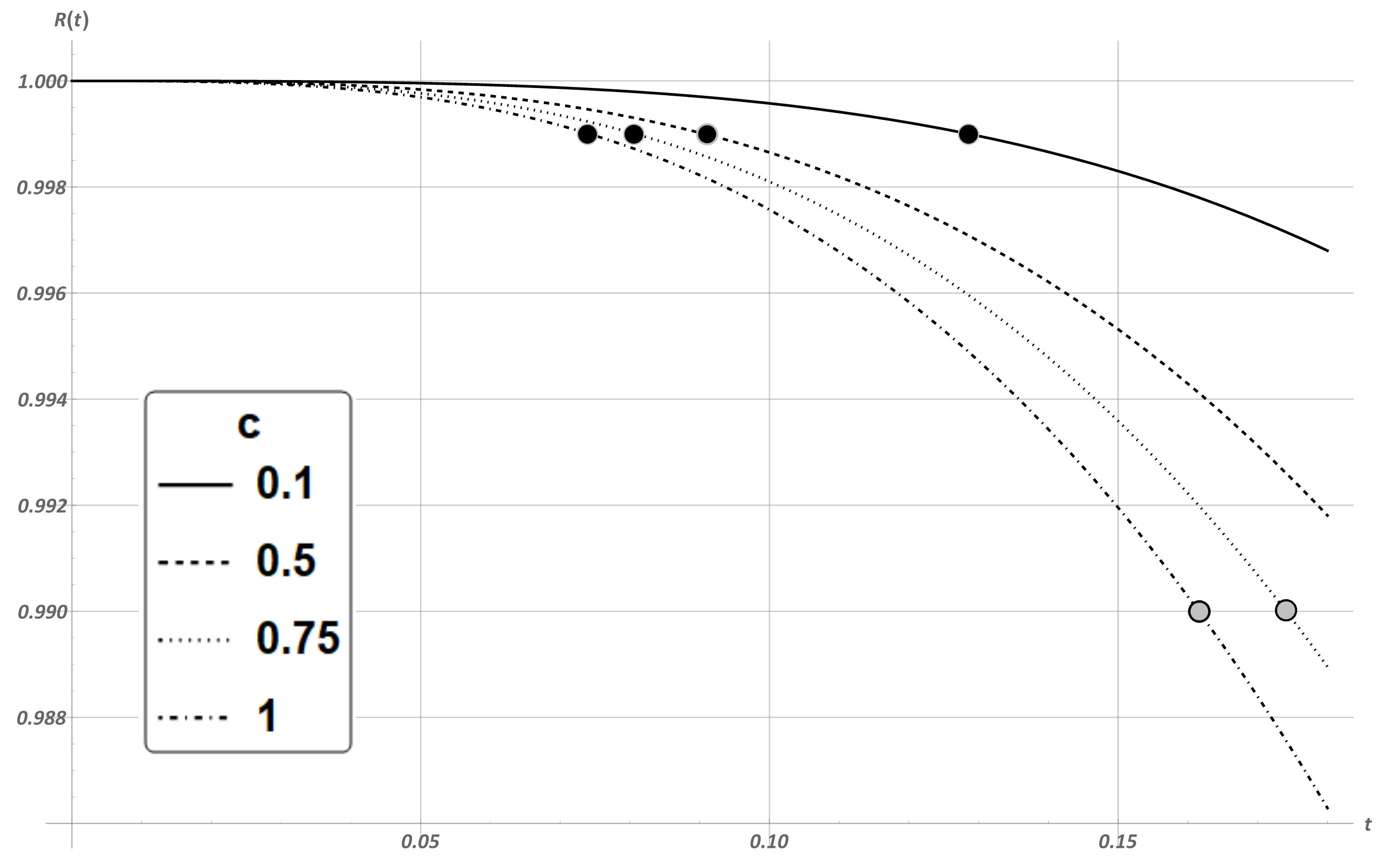
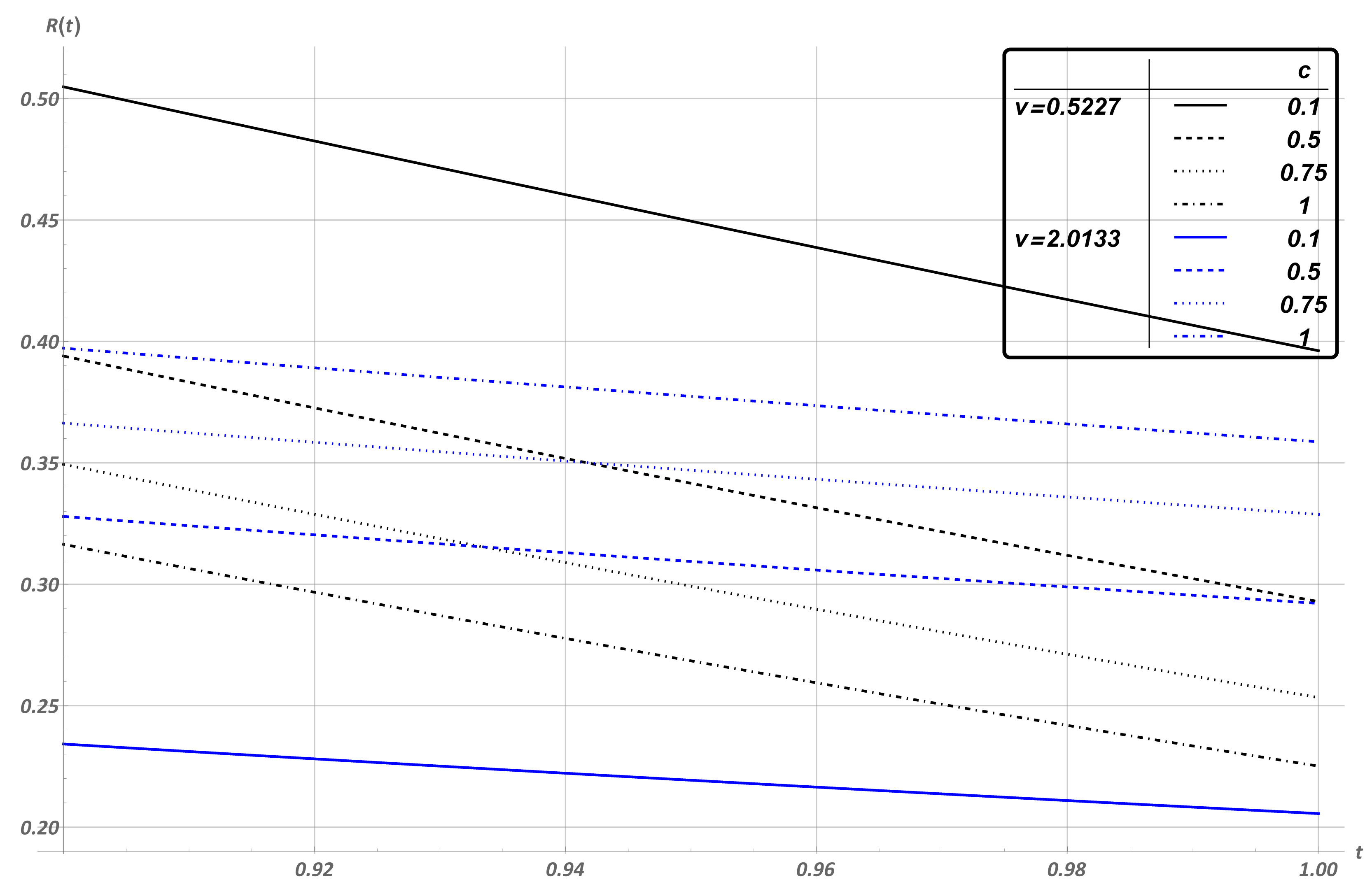
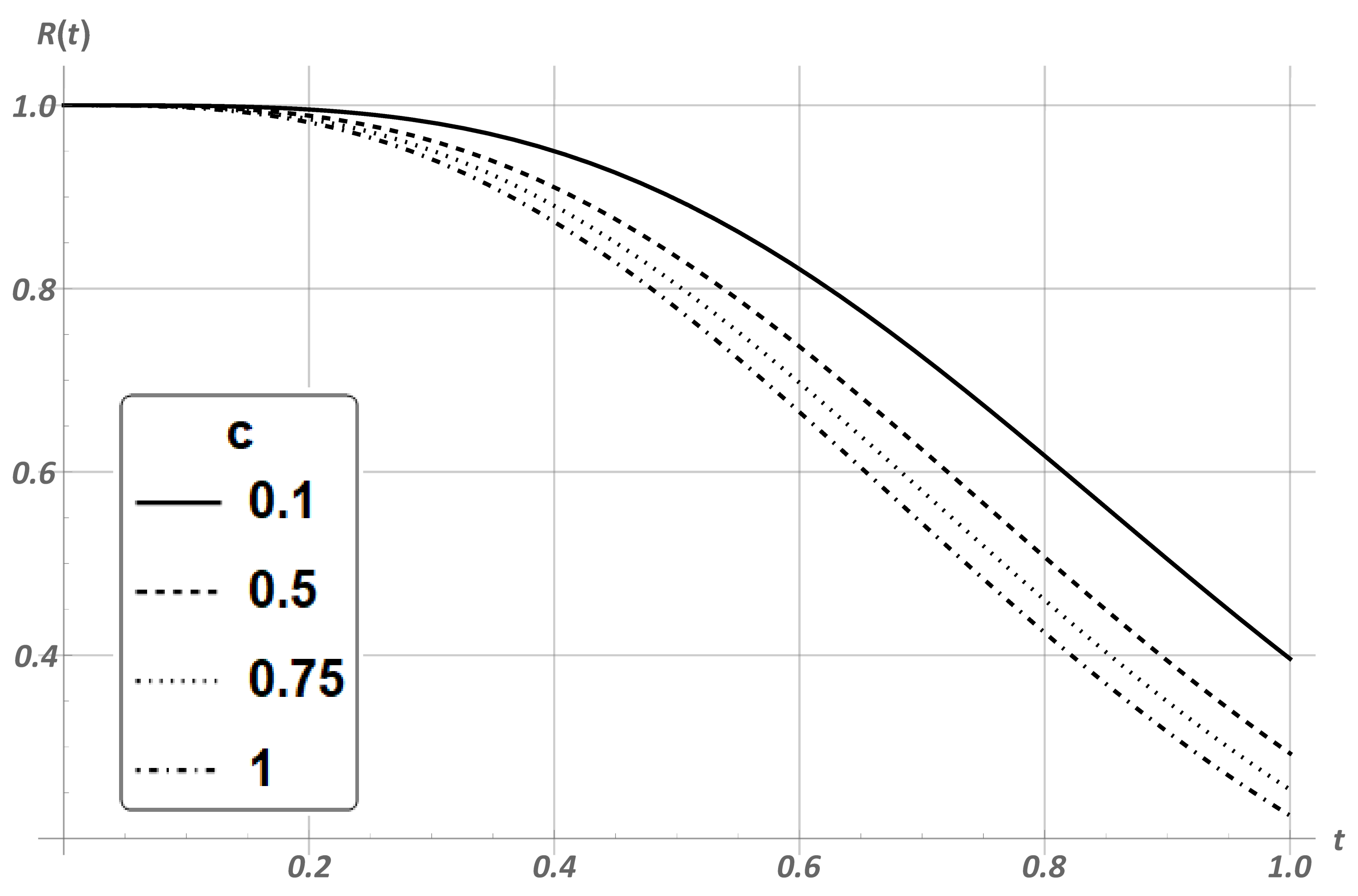
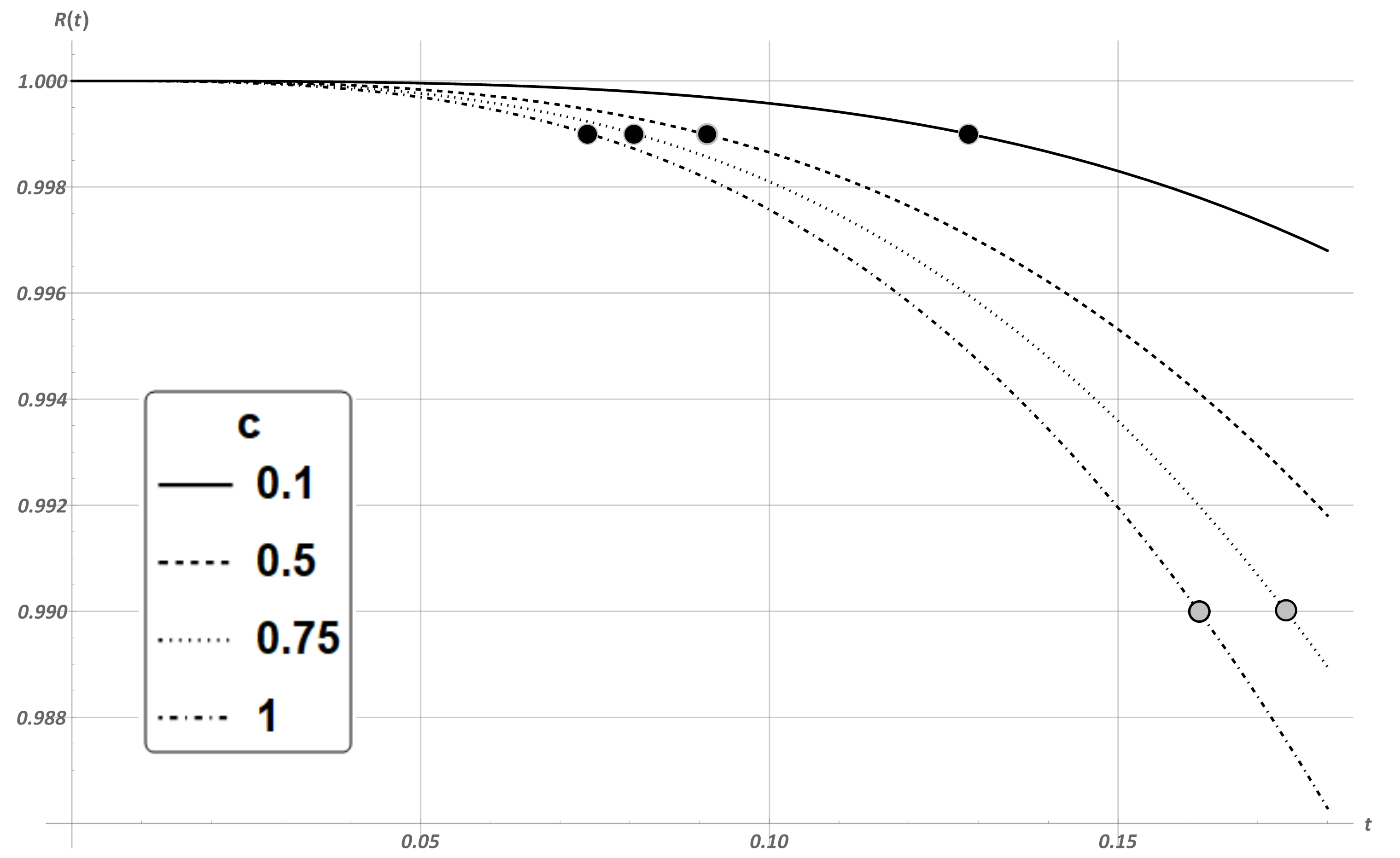
4. Numerical Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| iid | independent and identically distributed |
| rv | random variable |
| cdf | cumulative distribution function |
| probability density function | |
| GW | Gnedenko–Weibull distribution |
References
- Shepherd, D.K. k-out-of-n Systems. In Wiley StatsRef: Statistics Reference Online; Balakrishnan, N., Colton, T., Everitt, B., Piegorsch, W., Ruggeri, F., Teugels, J.L., Eds.; John Wiley & Sons: New York, NY, USA, 2014. [Google Scholar] [CrossRef]
- Trivedi, K.S. Probability and Statistics with Reliability, Queuing and Computer Science Applications, 2nd ed.; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar]
- Kuo, W.; Zuo, M.J. Optimal Reliability Modeling: Principles and Applications; John Wiley & Sons: New York, NY, USA, 2003. [Google Scholar]
- Eryilmaz, S. Review of recent advances in reliability of consecutive k-out-of-n and related systems. Proc. Inst. Mech. Eng. Part O J. Risk Reliab. 2010, 224, 225–237. [Google Scholar] [CrossRef]
- Levitin, G.; Xing, L.; Dai, Y. Heterogeneous 1-out-of-N warm standby systems with dynamic uneven backups. IEEE Trans. Reliab. 2015, 64, 1325–1339. [Google Scholar] [CrossRef]
- Gertsbakh, I.; Shpungin, Y. Reliability Of Heterogeneous ((k, r)-out-of-(n, m)) System. RTA 2016, 11, 8–10. [Google Scholar]
- Ushakov, I. A universal generating function. Sov. J. Comput. Syst. Sci. 1986, 24, 37–49. [Google Scholar]
- Ushakov, I. Optimal standby problem and a universal generating function. Sov. J. Comput. Syst. Sci. 1987, 25, 61–73. [Google Scholar]
- Levitin, G. The Universal Generating Function in Reliability ANALYSIS and Optimization; Springer Series in Reliability Engineering; Springer: London, UK, 2005. [Google Scholar]
- Vishnevsky, V.M.; Kozyrev, D.V.; Rykov, V.V.; Nguyen, D.P. Reliability modeling of an unmanned high-altitude mobile of a tethered telecommunication platform. Inf. Technol. Comput. Syst. 2020, 4, 26–36. [Google Scholar] [CrossRef]
- Cramer, E.; Kamps, U. Sequential order statistics and k-out-of-n systems with sequentially adjusted failure rates. Ann. Inst. Stat. Math. 1996, 48, 535–549. [Google Scholar] [CrossRef]
- Liang, X.; Xiong, Y.; Li, Z. Exact Reliability Formula for Consecutive-k-Out-of-n Repairable Systems. IEEE Trans. Reliab. 2010, 59, 313–318. [Google Scholar] [CrossRef]
- Gökdere, G.; Ng, H.K.T. Time-dependent reliability analysis for repairable consecutive-k-out-of-n:F system. Stat. Theory Relat. Fields 2022, 6, 139–147. [Google Scholar] [CrossRef]
- Wu, Y.; Guan, J. Repairable consecutive-k-out-of-n: G systems with r repairmen. IEEE Trans. Reliab. 2005, 54, 328–337. [Google Scholar] [CrossRef]
- Krishnamoorthy, A.; Rekha, A. k-out-of-n-System with Repair: T–Policy. Korean J. Comput. Appl. Math. 2001, 8, 199–212. [Google Scholar] [CrossRef]
- Liu, H. Reliability of a load-sharing k-out-of-n:G system: Non-iid components with arbitrary distributions. IEEE Trans. Reliab. 1998, 47, 279–284. [Google Scholar] [CrossRef]
- Sutar, S.; Naik-Nimbalkar, U.V. A load share model for non-identical components of a k-out-of-m system. Appl. Math. Model. 2019, 72, 486–498. [Google Scholar] [CrossRef]
- Hellmich, M. Semi-Markov embeddable reliability structures and applications to load-sharing k-out-of-n system. Int. J. Rel. Qual. Safety Eng. 2013, 20, 1350007. [Google Scholar] [CrossRef]
- Rykov, V.; Kochueva, O.; Farkhadov, M. Preventive Maintenance of a k-out-of-n System with Applications in Subsea Pipeline Monitoring. J. Mar. Sci. Eng. 2021, 9, 85. [Google Scholar] [CrossRef]
- Rykov, V.; Kochueva, O.; Rykov, Y. Preventive Maintenance of k-out-of-n System with respect to Cost-type Criterion. Mathematics 2021, 9, 2798. [Google Scholar] [CrossRef]
- Rykov, V.; Zaripova, E.; Ivanova, N.; Shorgin, S. On Sensitivity Analysis of Steady State Probabilities of Double Redundant Renewable System with Marshal-Olkin Failure Model. InDistributed Computer and Communication Networks; Vishnevskiy, V.V., Kozyrev, D.V., Eds.; Springer: Berlin/Heidelberg, Germany, 2018; pp. 234–245. [Google Scholar]
- Rykov, V.; Ivanova, N.; Kozyrev, D. Sensitivity Analysis of a k-out-of-n:F System Characteristics to Shapes of Input Distribution. Lect. Notes Comput. Sci. (LNCS) 2020, 12563, 485–496. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rykov, V.; Ivanova, N.; Kochetkova, I. Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure. Mathematics 2022, 10, 2457. https://doi.org/10.3390/math10142457
Rykov V, Ivanova N, Kochetkova I. Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure. Mathematics. 2022; 10(14):2457. https://doi.org/10.3390/math10142457
Chicago/Turabian StyleRykov, Vladimir, Nika Ivanova, and Irina Kochetkova. 2022. "Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure" Mathematics 10, no. 14: 2457. https://doi.org/10.3390/math10142457
APA StyleRykov, V., Ivanova, N., & Kochetkova, I. (2022). Reliability Analysis of a Load-Sharing k-out-of-n System Due to Its Components’ Failure. Mathematics, 10(14), 2457. https://doi.org/10.3390/math10142457