1. Introduction
Maritime simulators provide several benefits to real-world operations. They provide a flexible learning environment creating conditions for training not usually possible in real-world work settings, such as running repetitive scenarios, simulating emergencies and challenging weather conditions, and pausing operations to provide feedback or carry out detailed discussions [
1,
2,
3,
4]. Further benefits of maritime simulators include overall lower costs compared with similar real-world activities, ease of information assimilation, scenario control, learning process efficiency, and material availability [
3,
5]. Additionally, these characteristics provide unique circumstances and conditions for students to develop critical incident management and stress-coping skills [
3,
6].
There are currently four types of maritime simulators commonly employed by Maritime Education and Training (MET) institutions. Desktop-based simulators consist of desktop computers replicating some aspects of maritime operations using preloaded simulation software. Full-mission bridge simulators consist of a realistic ship’s bridge replica with all essential instrumentations, displays (i.e., the physical space of the ship), and photorealistic digital projections of the marine environment; this option greatly enhances the simulation realism and is currently preferred. Virtual reality (VR) simulators immerse users in a realistic experience of the work environment using wearable head-mounted displays. The virtual scene is continuously updated according to the user’s head position. Finally, cloud-based simulators enable instructors and trainees to run the simulation online using a web browser with their own devices [
7,
8,
9].
‘Fidelity’, ‘realism’, and ‘accuracy’ are concepts used extensively in the simulator-related literature. Borgvall [
10] (p. 244) defined fidelity as ‘the degree of similarity between a simulator and the environment it is designed to simulate’. Owen [
11] (p. 9) defined realism as ‘the extent to which the simulation or simulator appears, feels and/or behaves the same as the real-life system’. Finally, accuracy is defined as the degree to which a simulator’s real object representation is precise and is normally associated with an objective measurement [
12]; it is about exactness [
3]. Given the similarity among these concepts, fidelity is arbitrarily used throughout this study as an umbrella and subjective term meaning ‘the degree of similarity between the training situation and the operational situation being simulated’ (National Academies of Sciences, Engineering, and Medicine [
12] (p. 118).
Measuring maritime simulators’ fidelity level has been debated for years, as simulator fidelity is a complex variable and does not determine the overall fidelity of simulated practices alone. Moreover, authors, such as Sellberg and Wiig [
13] and Salas et al. [
14] questioned whether achieving the highest fidelity level at the cost of appropriate utilisation, better alignment with teaching methods and better preparation of instructors is the way forward. Maran and Glavin [
15] and Dahlstrom et al. [
16] noted that effective training can be achieved with simple simulators and without sophisticated graphics, provided that the synthetic training device creates the conditions for developing the intended skills, and proper teaching methods and pedagogical approaches are used. However, what are the features present in a maritime simulator that create the conditions for marine pilots to develop the intended skills? How can those features support the appropriate level of fidelity, and therefore, achieve the learning objectives?
To answer these research questions, this systematic literature review (SLR) aims to map the literature landscape and clarify the types of simulator fidelity and how best to use them. Systematically reviewing the state-of-the-art maritime simulator fidelity can provide insights to maritime practitioners on how fidelity features can be effectively used during training and evaluation. It can also help with identifying the gaps in the literature, thus informing a research agenda for future studies.
2. Materials and Methods
An SLR is a research method employing a predetermined protocol for reviewing literature surrounding a particular topic aiming at answering research questions. The aim is to assess the extent of academic literature on simulator fidelity, including (i) who has undertaken the research; (ii) where and when it has been published; and (iii) what the literature discusses about simulator fidelity. Based on principles of transparency, clarity, integration, focus, and equality, the method includes the following steps: (1) using keywords to find the literature on scientific databases, (2) screening the literature based on inclusion and exclusion criteria, (3) codifying the literature using a database (literature grid), and (4) in-depth analysis and comparison [
17,
18,
19].
2.1. Initial Search
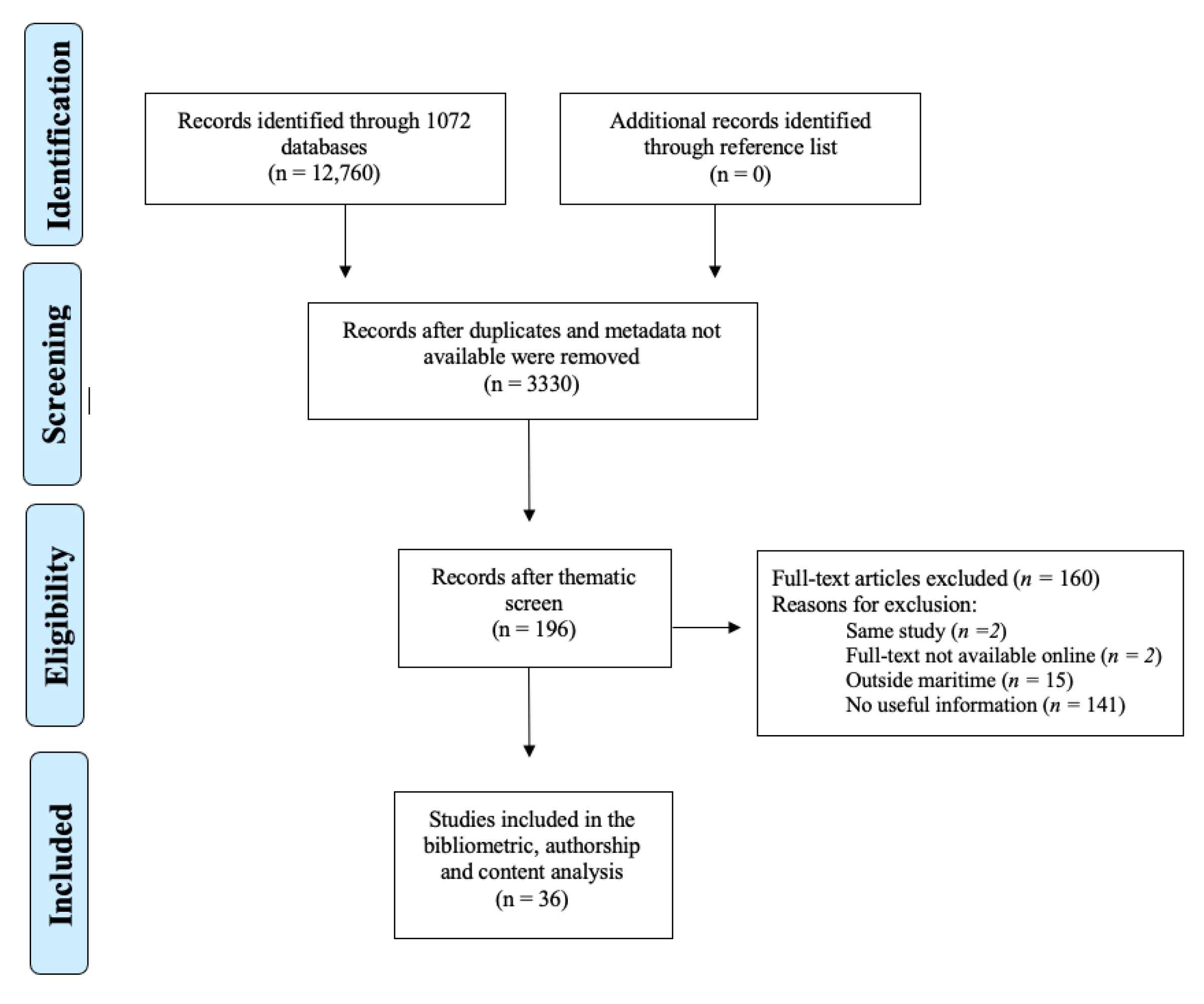
A search was conducted through a university’s library database using the keyword string ‘maritime (OR marine OR sea) training’ AND ‘pilotage (OR navigation OR seafarer)’ AND ‘education (OR training)’ AND ‘simulator (OR simulation)’. The university’s library collection is comprehensive; it is composed of more than 1072 different databases, including Ebsco, ProQuest, Science Direct, and Web of Science.
The search was limited to ‘white’ (journal articles, books, e-books, book chapters, conference proceedings) and ‘grey’ literature (dissertations, thesis, industry reports, technical reports, and trade publication articles). Since the objective was to understand how different aspects of the simulator fidelity are used, we included grey literature, such as commercial publications, as part of the search strategy. Only references published in English and within the last 16 years (October 2005 to October 2021) were selected. The search resulted in 12,760 references.
2.2. Inclusion and Exclusion Criteria
Different from traditional SLRs, in which authors only retrieve papers meeting a particular set of criteria, we decided to conduct a more objective selection. Meta data retrieved directly from the library webpage allowed a corpus analysis and selection of papers in which the title and abstract contained maritime simulation training- and education-related keywords. This approach assisted in minimising bias and selecting the references in a large dataset.
The dataset contained the following fields: DOI, authors, title, year, journal, and abstract and was transferred to an Excel spreadsheet. To clean duplicates, DOI, title, year, journal, and abstract were inspected. References in which the abstract’s word count was lower than 50 were excluded. Based on some manual evaluations, it was identified that irrelevant references’ abstracts contained error messages or unrelated content. Moreover, only references with abstracts available for retrieval were selected. Consequently, the dataset was reduced to 3330 references.
Based on the title and abstract, an initial corpus analysis was conducted to verify whether references were related to maritime training and education. The computer-assisted thematic analysis software Iramuteq
® was used after preprocessing the dataset using Python libraries [
20]. Python was used to remove non-significant words, such as prepositions, auxiliary verbs, and articles. The objective was to map the themes surrounding the literature.
The initial analysis showed a variety of references with 24 thematic classes, i.e., word clusters, found. The vocabulary clustered in three classes seemed the most relevant to this SLR; therefore, 196 references related to these classes were selected for further analysis. Forty-one references were identified as related to maritime simulator-based training, directly or indirectly discussing fidelity dimensions, levels, and training impact. Given data availability or duplicated content, this list was reduced to 36 references.
Figure 1 provides a summary of the number of references at the end of each step.
2.3. Data Analysis
The selected corpus’s analysis was based on an Excel spreadsheet prepared after the literature screening. Three approaches were considered: bibliometric, authorship, and content analyses. Bibliometric analysis (
Section 3) involves reviewing references’ objective aspects, i.e., authorship, year of publication, first author’s affiliation and country, publication title (journal, book, or conference), study type, main subject, number of citations, research methods, and analysis. Authorship analysis (
Section 4) revealed the authors who were published and cited the most, collaboration networks, and their main topics of research. Content analysis (
Section 5) aims at extracting relevant literature excerpts and findings and classifying them into themes, allowing the visualisation of the literature trends.
The content analysis revealed many common themes, such as the role of instructors and the degree of similarity between the bridge controls and the vessel being simulated. These themes were then classified according to Stanton’s fidelity classification [
21] as either physical (or engineering) or functional. Physical fidelity refers to the degree to which the simulator’s physical features and characteristics look or feel like the real environment. It included ergonomic layout, visual system, vessel manoeuvrability, and hydrographic modelling. However, functional fidelity concerns the degree to which the simulator works or behaves as the real environment and encompasses training program design, simulator session design, and the instructor’s role. In addition to the content analysis, we analysed how these categories are related to the authors and evolved over time.
3. Result: Bibliometric Analysis
3.1. Timeline
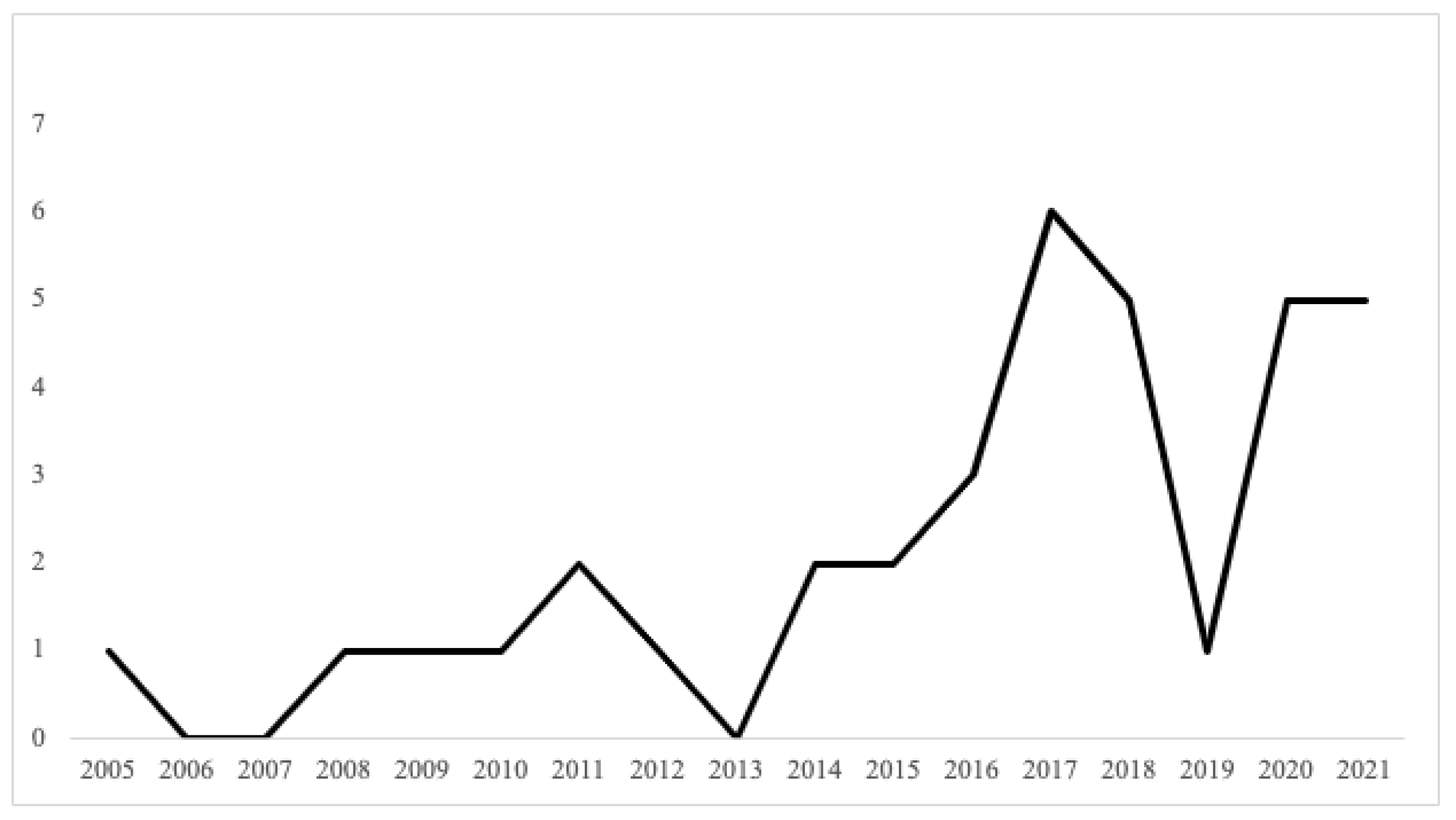
The evolution of publications contained in the last 15 years is presented in
Figure 2. There is an upsurge of publications after 2012, with a peak in 2017. Despite a reduction in 2019, the number of publications increased again in 2020 and 2021, with five publications each year. Therefore, there has been increasing interest in the topic since 2012, with an uptrend movement for years ahead.
3.2. Prominent Periodicals
The 36 selected publications were distributed among 33 journals, conferences, or books, displaying a wide variety of periodicals. Only the conference 19th Annual General Assembly (AGA) of the International Association of Maritime Universities (IAMU) in 2018 and the journals International Journal on Marine Navigation and Safety of Sea Transportation (1), Simulators for Transportation Human Factors (2), and WMU Journal of Maritime Affairs (3) contained two articles each.
3.3. Citation Distribution
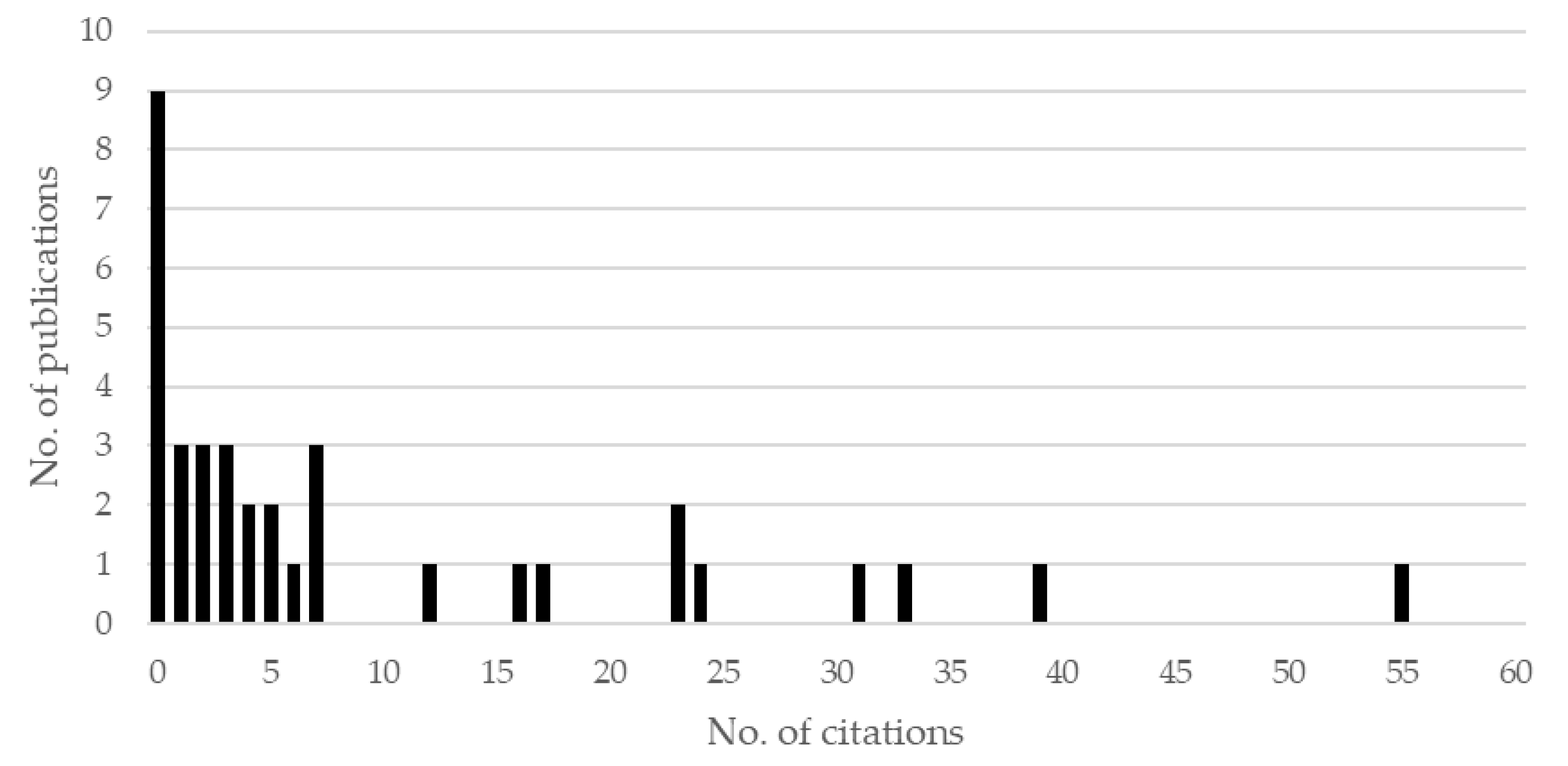
The analysis found that most papers have few citations, usually below ten, as seen in
Figure 3. Publications, such as Hontvedt [
1], Saus et al. [
22], Sellberg [
4], and Gekara et al. [
23] are exceptions, receiving more than 30 citations each, with 55, 39, 33, and 31 citations, respectively. Thirteen publications have no citations, which may imply that they are not relevant or visible enough to be found.
3.4. Main Topics
Table 1 illustrates the number of papers by year of publication containing mentions of physical fidelity and functional fidelity. It seems that these two topics have gained traction since 2016 and may continue to dominate the discourse in the foreseeable future.
Table 1 also breaks down physical and functional fidelities and presents the number of publications per subcategory. As more research is conducted in the field, discussions about the physical features of the simulator, very often referred to as ergonomics, have dominated the literature since 2017.
4. Result: Authorship Analysis
4.1. Researchers Who Published the Most
Table 2 shows every author who published at least three papers during the period analysed. Charlott Sellberg, Michael Baldauf, and Knud Benedict stand out as the researchers who published most on the topic, with at least four publications each.
4.2. Country and Universities of the First Author
Scandinavian countries, such as Norway and Sweden, figure high in the list, with eleven and five publications, respectively. Germany also presents a high output, with four publications and is followed by China, Australia, and the USA, with two publications each.
A list of prominent institutional affiliations is shown in
Table 3. Similar to
Section 3.3, Scandinavian countries’ universities figure very high on the list, particularly the universities of South-Eastern Norway and Oslo, which are both in Norway, and the University of Gothenburg, in Sweden. Dalian Maritime University in China and Hochschule Wismar in Germany are also highlighted.
4.3. Topic Distribution
Table 4 shows the distribution of publications per main authors and the category of simulator fidelity. Only authors with at least two publications in any given category are included in
Table 4. It is evident that the literature discusses functional fidelity in greater detail compared with physical fidelity, which is normally generically mentioned. This fact is even more evident when considering studies by Baldauf, Benedict, and Sellberg that concentrate on training program design, simulator session design, and the instructor’s role.
4.4. Coauthorship Analysis
Despite having identified 65 different authors across 36 papers, we noticed a concentration of publications authored by a group of 9 researchers (
Table 5). The coauthorship analysis of this group revealed established partnerships between Baldauf and Benedict, with four papers authored by them in conjunction. In contrast, Sellberg does not have two papers published with the same coauthor.
5. Result: Content Analysis
The following subsections present the findings of the content analysis. The results are presented based on the categories and subcategories of simulator fidelity. We start with physical fidelity, which includes the ergonomic layout of the bridge, visual system, vessel manoeuvrability, and hydrographic modelling. Then, we present functional fidelity, including training program design, simulator session design, and the role of the instructor.
5.1. Physical Fidelity
Physical fidelity refers to the degree to which the simulated environment resembles the real environment from the vessel bridge [
24]. The aim of physical fidelity is to represent the same views as much as possible, as well as vessel behaviour, controls disposition, and displays that trainees would normally encounter in a real vessel. In the next sections, the following dimensions are introduced: the bridge’s ergonomic layout, the visual system, the vessel manoeuvrability, and the hydrographic modelling.
Table 6 summarises the main features of the physical fidelity dimension and the main aspects discussed by the literature.
5.1.1. Ergonomic Layout of the Bridge
A total of 9 out of 36 papers explicitly report the use of a fully functional bridge [
1,
4,
6,
7,
8,
22,
25,
26,
27,
28], while 3 describe low-fidelity simulator systems [
29,
30,
31], and 2 describe simulator platforms based on multiple stations [
26,
31,
32]. As stated by Lützhöft et al. [
3], despite the development of a simulator that replicates other workplaces and tasks on a ship, the majority of the simulators try to emulate a bridge operation.
Lin et al. [
31] reported a 5G and VR-based distributed simulator. The platform would involve one instructor and multiple students, each performing training in their own vessel and environment. The authors believed that having an immersive and distributed simulator could overcome the geographical and temporal limitations of the traditional maritime simulator and provide more flexibility for training. Shi and Hu [
32] proposed a multiagent system-based framework that allows the integration of remote simulator stations. The objective is to allow students to develop communication and coordination skills when navigating areas of great traffic density. Longo et al. [
26] reported the development of a joint and cooperative simulator platform to train port pilots. The platform is composed of a full bridge containership simulator, a full control tower simulator, and a tugboat bridge simulator. The aim is to increase fidelity by allowing different actors to interact in the simulated scenario of the last mile of navigation.
Low-fidelity simulators discussed in the literature are mainly used to train specific skills. Benedict et al. [
29] proposed a desktop simulator for safety and security in METs. Instead of simulating the bridge and operations of a ship, the simulator aims to reproduce the whole vessel, including its different rooms and decks, where participants can move freely around it in the first person. For each scenario, trainees must interact with the security and safety gear and address the problem. The system is composed of one instructor station and two to sixteen simulator stations. Benedict et al. [
30] describe fast time simulation (FTS), a software that simulates a real ship manoeuvre in less time. Based on a 2D interface, the system can be used as an effective tool for lecturing and demonstrating ships’ motion characteristics, as well as for the ship handling simulator training and during real ship operations. Its value lies in the possibility of preparing a plan and verifying its feasibility, thus allowing instructors and trainees to better assess the situation and review what did and did not work. Lin et al. [
31] proposed a conceptual simulator based on VR and integrated through 5G that does not have any physical component. The system is fully immersive and can be used in any place.
While most researchers do not specify the environment’s size, the range for horizontal visual fields varies considerably between studies. It ranges from 120° (in four of the six bridges used in Sencila et al. [
27]) to 360°, with 200°–240° being the most common values encountered [
1,
2,
22,
27,
33]. Saus [
22] describes the full mission simulator with a 360° horizontal visual field used in the study as having 14.0 m of diameter and 3.4 m of height. Longo et al. [
26] developed a full bridge container ship that contains 3 screens of 2 × 1.5 m dimensions located at 2.5 m in height, which we believe would provide 120° of horizontal visual field.
Bridge instruments, displays, and the full set of ship controls for navigating and manoeuvring are commonly included, ranging from full mission bridge conning station, automatic radar plotting aids (ARPA)/radar, electronic chart display and information system (ECDIS), global maritime distress and safety system (GMDSS) stations, communication module with very high-frequency (VHF) radio and internal communication, ship status information (e.g., engine status) and environmental data, to navigation aids, such as a GPS, log, echo sounder, and universal automatic identification system (UAIS) [
1,
6,
26,
27].
Sellberg [
8] commented on the disadvantage of simulators lacking a motion platform, and thus, lacking the kinaesthetic feedback of a real ship sailing at sea even though the sense of motion could be simulated through visual input. Sellberg [
8] also emphasised the need for auditory stimuli in the form of either sounds, signals, or constant background noise from the engine room. Longo et al. [
26] showed how a surrounding system can contribute to increasing the sense of immersion and presence. Nonetheless, Sellberg [
8] warned that costly improvements in technical fidelity were found to have a rather small impact on learning.
5.1.2. Visual System
Given the preferred usage of full-mission bridge simulators, descriptions of visual fidelity refer mainly to digital projections of the marine environment, although even such descriptions are limited in this field. It should be noted that ‘visual’ refers to the projected images on screens outside of the bridge windows. The visual system is composed of the sea surface, sky, and geographic features, infrastructure placed on land and in water, and vessels. Mentions of refresh rate and resolution are mostly absent. An exception is Song et al. [
34], who described a typical image refresh rate stabilising at 60 Hz with a maximum texture size of 1024 × 1024 pixels for models.
Mansuy et al. [
33] described how the part of the port above sea level is represented by a simplified two-dimensional aerial view in their simulations, with the marine environment including the layout of the port, the coastline, and the specific mooring areas for the different types of vessels. Li et al. [
35,
37] added details on the implementation of the reflection effect and small waves on the sea surface, the simulation of foam after the waves break, and the highlight effect of the sun. Findings from Madushani et al. [
36] reported that the addition of visual effects was associated with an improvement in the simulation results, and when the number of waves equalled three, the proposed solution had the best outcome from their experiments when assessed through a user test conducted with ten expert naval users from the Ocean University, Sri Lanka, and Sri Lanka Navy.
Madushani et al. [
36] also noted that the sea surface must have a polygonal representation for rendering, which needs to be approximated with a form of grid. The authors attested that it is appropriate to first create a planar grid and then displace points according to the height field variation. They then selected wave models to generate the height field and added visual effects on top of the simulated states. For that task, Li et al. [
37] employed Boussinesq equations to generate an approximation in fluid dynamics for water waves valid for weak nonlinear and long waves.
Hontvedt [
1] noted that the lack of accuracy on the visual system can affect marine pilots’ training, as it may force them to rely on instruments for fine navigation, leading to frustration and distractions. In their study, participants complained about the visual inconsistencies between the electronic map, the visual display, and the actual waters. In this case, the authors argued that the lack of accuracy may lead participants to manipulate the underlying rules and dynamics of the simulations instead of engaging in the appropriate professional practice. Similarly, Sharma et al. [
28] reported on marine pilot detection and paid attention to discrepancies between the electronic map and the visual outlook through bridge windows in their research. They found this to be an issue because close manoeuvring, such as during berthing, requires much higher fidelity, greater consistency, and accuracy than other types of training in terms of the relationship between information presented on bridge equipment and the visual display representation. Lützhöft et al. [
3] reinforced the importance of having accurate simulators so participants can take the simulator training seriously. Additionally, Smith and Oskamp [
9] argued that real-time computations are key components of simulations and that a marine pilot should not notice any lag due to computer processing.
5.1.3. Vessel Manoeuvrability
Zheleznyakova [
38] stressed that vessel models should aim for good levels of realism while guaranteeing smoothness of simulation, as slight discrepancies becoming noticeable to users can considerably reduce the sense of immersion. The author modelled vessel behaviour by making the vessel fully determined by its hull’s 3D geometry, a solid object endowed with mass and volume, disregarding manoeuvrability characteristics. The vessel’s outer surface 3D geometry is covered with a detailed triangular surface mesh, which is used as input data. This solid vessel model’s creation is performed with computer-aided design (CAD) software (e.g., AutoCAD). Longo et al. [
26] adapted the six-degree-of-freedom mathematical model and the manoeuvring mathematical modelling group model to reproduce a containership motion at sea. Berg and Ringen [
39], employing MARINTEK’s simulation software, described a similar approach, with a preprocessing program preparing the input to the manoeuvring prediction program based on the underwater hull’s shape in digitised form. Moreover, Chambers and Main [
6] examined the DEN-Mark1 ship models, whose handling was continuously changed depending on the actual depth/draft ratio at the ship’s current location. This ensures that the ship is handled accurately as it progresses from deep water in an anchorage area into the shallow water of a swing basin.
Last, Gao [
40] proposed a multiblock fuzzy cognitive map (FCM) for the steady turning motion of ships, as it can represent nonlinear systems effectively. His results indicate the important role of hyperparameters and that the trade-off between accuracy and calculation burden can produce satisfactory results. The strengths of the proposed model include the simplicity of parameter estimation, the performance of neural networks with enhanced interpretability, and independence on measurement apparatuses compared with traditional models. Drawbacks include time-lag dynamic response problems, measurement noise, and the oversimplification of a nonlinear system into one FCM. Moreover, an excellent model will require trial and error to obtain reliable hyperparameters.
5.1.4. Hydrographic Modelling
Hydrographic modelling is the digital replication of features of a seabed area, coastline, and key underwater (and above) water infrastructure that could influence vessel manoeuvring or aid a mariner in control of that manoeuvring. It includes the underwater contours and seabed composition since both the depth and firmness of the bottom topography affect vessel control in differing manners. It also includes underwater features, such as pipelines, dredged channels, and key observation features, including raised land, prominent buildings, jetties, lighthouses, beacons, and buoys. Some simulator facilities categorise other features, such as currents, swells, and wind waves as either instructor inputs or visual or vessel modelling. However, the academic literature categorises these types of features under hydrographic modelling, prompting them to be coupled within this physical fidelity dimension in this study.
Mansuy et al. [
33] described how the submersed layout and the sea floor are 3D modelled by bathymetric models for each port in the simulation. Li et al. [
37] described two types of view-dependent grids used for sea surface geometry modelling, namely, projected and radial grids. In the projected grid method, the grid vertices are evenly spaced in the view plane and then projected to sea level. In the radial grid method, the radial grid central position is the camera position at sea level, and it provides more detail closer to the viewer. Both alternatives have a level of detailed effects. Longo et al. [
26] used Creator and Vega Prime by Presagis to create highly optimised 3D geometric models and high-fidelity 3D real-time simulations of the port of Salerno.
Smith and Oskamp [
9] detailed wave modelling in real-time simulators, focusing on the wave field’s visual representation for marine pilots and wave forces in the simulator. Real-time simulations are a highly reliable method mostly based on electromagnetic transient simulations of complex systems, which are composed of many domains. Smith and Oskamp [
9] also described the preparation of a coastal hydrodynamic model, emphasising that current vectors are only required in simulations at navigable water depths or over navigation channels. Mansuy et al. [
33] detailed current modelling, with annual swell data used for their generation. The authors modelled two current conditions, moderate and extreme. Finally, Ji et al. [
41] used the Weierstrass–Mandelbrot function to simulate coastline wave deflection.
Smith and Oskamp [
9] elaborated on metocean condition implementation in real-time simulations, which could be truncated based on a simple characterisation of sea state and currents in a snapshot of time, represented by a static current field indicating peak and ebb or flood tide or by simple representative vectors. Hjelmervik et al. [
42] recommended training nautical students on homogeneous currents (unidirectional currents with constant strength) before moving to heterogeneous ones (currents varying in both direction and strength). As they reached a satisfactory skill level with homogeneous currents, they were transitioned to scenarios containing heterogeneous currents where the other skills are developed. They noted that students would experience higher difficulty and rely on the skills developed to cope with homogeneous currents, leading to optimal learning.
While the simulation area size is mostly absent in the literature, only Li et al. [
35] detailed the parameters used for shallow water wave simulation in the Port of Dalian. The simulation region employed is 9000 metres by 8100 metres, with the number of grid points at 3,603,801 (2001 × 1801).
5.2. Functional Fidelity
Functional fidelity is defined as the degree to which the simulated environment acts like the real operational equipment [
21], such as training program design, simulator session design, and the instructor’s role. Each of these subcategories is further presented below.
Table 7 presents a summary of the main features discussed by the literature with regard to functional fidelity.
5.2.1. Training Program Design
Training program design is the pathway through which students systematically and progressively develop their skills. A training program contains multiple simulator sessions, each with a delimited duration and specific objectives that will contribute to the program’s overall learning objectives. It is also focused on skills required to pilot a ship and avoids placing too much emphasis on skills required to manage the simulator, as these skills are not transferable to a ship.
Across the literature, different authors emphasised that training design needs to pay close attention to learning and training objectives, the international conventions regulating maritime training, and the working demands of students’ future professions [
1,
2,
6,
8,
13,
33]. The key training skills sought include resource prioritisation, effective communication, assertiveness and leadership [
3], and theoretical understanding of ship handling (such as vessel pivot points) with simulated performance [
6]. Employing student teams seems to be a common practice in simulation scenarios, attempting to simulate a full crew normally found in real situations [
4,
22,
43].
More specifically, Danylenko et al. [
25] and Sellberg [
4] believed that a simulator training program should focus on developing the ability to manoeuvre and control a ship in any condition using modern electronic radar tools, electronic navigation and information system complexes, communication between vessels and among the bridge team, and operation-suitable methods for finding the ship’s location and laying sea and ocean routes. Moreover, skills in evaluating navigation information obtained from all sources should be exercised with the purpose of making decisions to avoid collisions and manage the vessel’s safe navigation.
Sellberg and Wiig [
13] described an approach where students are expected to be accountable for mistakes, trained to analyse and discuss errors, and learn to recover and avoid them in the future. In this context, scenarios are designed to lead students into challenging situations where mistakes are easily made [
4]. The idea is that errors or mistakes provide an opportunity for retrospective discussions during debriefing, enabling the whole group to learn.
Sencila et al. [
27] focused on a variety of hydrometeorological conditions combined throughout 30 scenarios. These conditions are based on a port’s bathymetric data and real environmental elements. Similarly, Sharma et al. [
28] described that, over a program’s course, students were exposed to 80 scenarios covering various ports and straits worldwide to ensure optimum exposure to traffic scenarios encountered by navigators working on ships engaged in trade. Hontvedt and Øvergård [
2] tested different weather conditions and steering strategies affecting the ship to develop and reinforce mental models of these dynamics, where trainees’ situated experiences are supported through guidance and frequent debriefings.
5.2.2. Simulator Session Design
A simulator session is defined as conditions, scenarios, and activities that happen within a period of time and aim to help trainees reach part of the learning outcomes. The simulator session design contributes to functional fidelity by creating conditions that allow the simulator to act like a real vessel. In contrast to a ship, within a session, it is possible to reproduce a situation hardly encountered by trainees, such as emergencies or challenging weather conditions, or pause the scenario. Nonetheless, if those scenarios are too unrealistic, they negatively affect the simulator’s perceived fidelity, such as multiple nonrelated emergencies or an unrealistic improvement or deterioration of weather.
The work of Lupu et al. [
44] is the only study that provides a time estimate of different phases of the simulation exercises:
The duration of simulation sessions varies considerably throughout the research. The two routes considered in Saus et al. [
22] lasted 75 min and 60 min, while the assessment in Gekara et al. [
23] for deck officers lasted 30 min, covering navigation, manoeuvring, docking, and collision avoidance in a scenario where two engine problems were programmed to occur. Moreover, Hontvedt [
1] considered 90 min scenarios, and Hjelmervik et al. [
42] described participants completing 5 runs of 17 min each at full speed in their experiments.
Sen Do et al. [
45] reported that meteorological, geographical characteristics, and practical traffic conditions are included in the scenarios to be used in the simulator training. If applicable, storms, currents, wind, waves, tides, depths, and other weather conditions, such as rain, snow, ice, day, or night, are also added to make the scenario more realistic. Hjelmervik et al. [
42] suggested starting with a session that does not involve ocean currents and then progressively include either homogeneous or heterogeneous currents varying in both direction and strength.
Øvergård et al. [
3] considered training scenarios involving the integrated operation of two ships, a seismic vessel, and a support vessel, and the two bridge teams of each of these vessels must collaborate and coordinate their efforts to perform the work tasks safely and efficiently. In the same lines, another example would be the integration of a bridge simulator and a VTS, allowing the crew and the VTS operator to interact as if they were in a real situation.
Benedit et al. [
30] suggested that fast time simulation (FTS) can provide adequate support for briefing and debriefing. It allows instructors and trainees to plan for manoeuvres, discuss effects and strategies for different environmental conditions that might affect the ship unexpectedly at critical positions, and assess the probability of success of the trainee’s action.
5.2.3. The Role of the Instructor
Instructors are fundamental for successful training since pedagogy, simulators, or the environment themselves cannot teach trainees [
6]. The instructor’s role is an important component of functional fidelity, ensuring that the simulation is as realistic as possible [
44] and bridging theory and practice [
46].
During the simulator session, the instructor should implement the designed scenario and change parameters depending on the lesson objective [
6,
25,
28,
44,
47], such as changing weather conditions and ocean dynamics or adding other ships [
1,
2,
28,
47]. In some situations, Sharma et al. [
28] argued that instructors should play roles, such as another person in the bridge or VTS, or a crew in another vessel to increase the scenario’s fidelity whenever possible and ensure that learning outcomes are met. This flexibility also helps manage unexpected training session changes, such as when there is one student missing or simulating a VTS station that is needed.
Hjelmervik et al. [
42] and Benedict et al. [
48] reported how instructors at a session’s beginning could act as though they and the trainees were about to board a real vessel for sea training. This would involve conducting a briefing covering the vessel description, route, theoretical introduction to ship handling in ocean currents, ship manoeuvring characteristics, harbour area, starting situation, and environmental conditions within this area using conventional sea chart maps.
6. Discussion
The research’s first part revealed relevant bibliometric aspects. Publications containing mentions or discussion about fidelity dimensions upsurged after 2012 and have continuously grown despite a small reduction in 2019. However, a high number of citations is concentrated in only a few publications. Similarly, only one conference proceeding and three journals out of 33 periodicals have two publications each. Both facts, low citation and small number of papers in the same journal, suggest that either there is not enough interest in the scientific community to evaluate maritime simulator fidelity or models have yet to be found with dimensions that can be better studied, assessed, and quantified.
Concerning the authorship analysis results, Sellberg, Baldauf, and Benedict are the authors who published the most, although only after 2016. The main topics of interest have been session and training fidelity and the instructor’s role in increasing realism. Few authors discuss the implications of other simulator fidelity dimensions in depth. These findings also reinforce the need for a more comprehensive approach to assess simulator fidelity, going beyond subjective evaluation of functional fidelity.
Authors from Scandinavian universities rank at the top in the number of publications, followed by German institutions. This finding may indicate that the scientific evidence can be biased towards specific regions of the planet and developed countries. The same reality may not be found in countries outside Scandinavia and Europe.
Regarding physical fidelity, the majority of the papers refer to the ergonomic aspects of bridges. Some authors suggest that the simulators should project between 200° and 240° of visual fields, although a variation from 120° to 360° was found in the literature. Additional visual effects, sea surface polygonal representation, vessel modelling based on accurate behaviour, and hydrodynamic models may arguably improve the simulation results and therefore the sense of immersion. The argument is that not having a high-fidelity replica may divert professional and experienced trainees’ attention away from what is important and focus on the glitches and imperfections. We believe this argument works for experienced marine pilots, however, we could not verify if the argument applies to novice mariners as well. Despite a strong orientation towards high-fidelity full mission bridge simulators, there are some references that propose low-fidelity, limited, or special task simulators and integrated simulators allow the development of particular competencies not possible in a full mission simulator alone.
As the most discussed topic among scholars, functional fidelity is mainly discussed through the training program design, simulator session design, and the instructor’s role. A training program should have very clearly the training skills that should be mastered at the end of the program as well as expose students to as many different scenarios as possible, so to give trainees the chance to develop experience, strategies, and skills for the various conditions they may face in the sea. Training designs involving challenging situations that may lead to mistakes are seen as a positive element in the learning process for experienced mariners. Despite a lack of agreement on the session length, it seems most authors agree that the session should start with a brief, then the scenario would be run, and a debrief would be conducted at the end. Finally, there is an agreement that the instructors are essential to guarantee that the training fidelity meets the learning objectives, which includes playing roles if required.
Despite the extensive proposals aiming to enhance the simulator fidelity, the review could not identify many references justifying the rationale for setting up full mission simulators in the way they are set or how the simulator’s setup impacts the training outcomes and evaluation. The few that justify the choices only make qualitative arguments. Conversely, those who propose low-fidelity simulators or integrated simulators do not present evidence that these setups are better to train particular skills compared with standalone full mission bridge simulators.
Finally, there is a lack of standardised terminology to refer to simulator fidelity, realism, and accuracy. Perhaps this happens because of the granularity of publications and authors and the fact the field has not achieved a level of maturity to guarantee standardisation of the terminology.
Research Agenda
Most of the literature makes qualitative arguments for the use of various simulator features and different types of simulators without adequately assessing their impact on training. Apart from their quantitative measurement, a comparison of the values of these impacts could also lead to a better understanding of which categories of fidelity should be given priority in the development of a simulator. Likewise, the interactions between dimensions and the disproportionate benefits of their combined use in training should be explored, as both academia and practice would greatly benefit from these results. Perhaps a standardised terminology may allow better communication among the scientific community.
Concerning the representation of different realities in the literature, the balance has weighted more heavily towards studies conducted in Scandinavian countries. Further studies could be focused on a larger set of nations with different conditions, regulations, and policies in place to allow the literature to be more easily generalised to different contexts.
Moreover, currently, only six authors have been noted to have collaborated more than once with any given author, despite 65 authors identified in the field in the last 15 years. It is concluded that more granularity is needed in the participation of authors from different backgrounds and traditions.
7. Conclusions
In this paper, a systematic literature review was conducted, and the scientific literature on simulator fidelity over the past 15 years was assessed. We conclude that physical fidelity is comprised of the ergonomic layout of the bridge, visual system, vessel manoeuvrability, and hydrographic modelling, and functional fidelity involves the training program and session design and the instructor’s role. Equally important as physical fidelity is functional fidelity, which can increase the effectiveness of training and overcome some limitations.
We also conclude that the literature favours full mission simulators and high fidelity to avoid distracting trainees with inconsistencies and inaccurate representations. However, there is little evidence of the real impact of each of the fidelity features on the trainee’s performance or whether this also applies to novice mariners. In addition to that, low-fidelity, integrated, or distributed simulators can also be as useful as full mission simulators, as indicated by only a few references.
Our last conclusion is that the literature does not follow a particular tradition. The granularity may be responsible for a lack of understanding on what constitutes simulator fidelity, realism, or accuracy, to name a few common terms used. Despite the literature granularity, there is a prevalence of studies from Scandinavian and European institutions, which may not reflect the reality of universities and maritime facilities located elsewhere.
Despite a careful process of searching, screening, reviewing, and analysing the papers, and given the great number of references found, relevant studies may have been neglected or misrepresented. Authors’ biases may have also impacted the analysis of the papers. As a suggestion for future studies, we recommend further systematic literature reviews on the impact of maritime simulator fidelity on training outcomes focusing on quantitative studies that isolated some dimensions or configurations.
Author Contributions
Conceptualization, R.P.d.O., G.C.J., B.P., D.H., J.D. and M.A.; methodology, R.P.d.O., G.C.J. and B.P.; software, R.P.d.O. and B.P.; validation, R.P.d.O., G.C.J. and B.P.; formal analysis, R.P.d.O., G.C.J. and B.P.; investigation, R.P.d.O., G.C.J. and B.P.; resources, G.C.J.; data curation, R.P.d.O., G.C.J. and B.P.; writing—original draft preparation, R.P.d.O., G.C.J. and B.P.; writing—review and editing, R.P.d.O., G.C.J., B.P., M.A., D.H. and J.D.; visualization, R.P.d.O., G.C.J. and B.P.; supervision, G.C.J., D.H., J.D. and M.A.; project administration, G.C.J. and M.A.; funding acquisition, G.C.J. and M.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by Maritime Safety Queensland in 2021.
Data Availability Statement
Not applicable.
Acknowledgments
The authors would like to thank the reviewers and Captain Peter Listrup from Smartship Australia for valuable contributions and Maritime Safety Queensland for the unconditional support.
Conflicts of Interest
The funders had role in the decision to publish the results.
References
- Hontvedt, M. Professional vision in simulated environments—Examining professional maritime pilots’ performance of work tasks in a full-mission ship simulator. Learn. Cult. Soc. Interact. 2015, 7, 71–84. [Google Scholar] [CrossRef]
- Hontvedt, M.; Øvergård, K.I. Simulations at work—A framework for configuring simulation fidelity with training objectives. Comput. Support. Coop. Work 2020, 29, 85–113. [Google Scholar] [CrossRef]
- Øvergård, K.I.; Hontvedt, M.; Sorensen, L.J.; Smit, P.N.; Nazir, S. Maritime Bridge Crew Training. In Simulators for Transportation Human Factors: Research and Practice; Young, M.S., Lenné, M.G., Eds.; CRC Press: Boca Raton, FL, USA, 2017; pp. 281–309. [Google Scholar]
- Sellberg, C. From briefing, through scenario, to debriefing: The maritime instructor’s work during simulator-based training. Cogn. Technol. Work 2018, 20, 49–62. [Google Scholar] [CrossRef]
- Lützhöft, M.H.; Brown, P.; Dunham, R.; van Leeuwen, W.M.A. Maritime Research. In Simulators for Transportation Human Factors; Young, M.S., Lenné, M.G., Eds.; CRC Press: Boca Raton, FL, USA, 2017; pp. 258–278. [Google Scholar]
- Chambers, T.P.; Main, R. The use of high-fidelity simulators for training maritime pilots. J. Ocean Technol. 2016, 11, 117–131. [Google Scholar]
- Kim, T.E.; Sharma, A.; Bustgaard, M.; Gyldensten, W.C.; Nymoen, O.K.; Tusher, H.M.; Nazir, S. The continuum of simulator-based maritime training and education. WMU J. Marit. Aff. 2021, 20, 135–150. [Google Scholar] [CrossRef]
- Sellberg, C. Representing and enacting movement: The body as an instructional resource in a simulator-based environment. Educ. Inf. Technol. 2017, 22, 2311–2332. [Google Scholar] [CrossRef]
- Smith, E.D.; Oskamp, J.A. Real-time vessel simulation incorporating coastal numerical modelling. Coast. Eng. Proc. 2018, 36, 51. [Google Scholar] [CrossRef]
- Borgvall, J. Generating recommendations for simulator design through pilot assessment of prototype utility. Mil. Psychol. 2013, 25, 244–251. [Google Scholar] [CrossRef]
- Owen, L. From fairies to SimMan: Tolkien and realism in simulation. J. Surg. Simul. 2016, 3, 8–12. [Google Scholar] [CrossRef][Green Version]
- National Academies of Sciences, Engineering, and Medicine. Simulated Voyages: Using Simulation Technology to Train and License Mariners; The National Academies Press: Washington, DC, USA, 1996. [Google Scholar] [CrossRef]
- Sellberg, C.; Wiig, A.C. Telling stories from the sea: Facilitating professional learning in maritime post-simulation debriefings. Vocat. Learn. 2020, 13, 527–550. [Google Scholar] [CrossRef]
- Salas, E.; Bowers, C.A.; Rhodenizer, L. It is not how much you have but how you use it: Towards a rational use of simulation to support aviation training. Int. J. Aviat. Psychol. 1998, 8, 197–208. [Google Scholar] [CrossRef] [PubMed]
- Maran, N.J.; Glavin, R.J. Low-to high-fidelity simulation—A continuum of medical education? Med. Educ. 2003, 37, 22–28. [Google Scholar] [CrossRef] [PubMed]
- Dahlstrom, N.; Dekker, S.; van Winsen, R.; Nyce, J. Fidelity and validity of simulator training. Theor. Issues Ergon. Sci. 2009, 10, 305–314. [Google Scholar] [CrossRef]
- Dewey, A.; Drahota, A. Introduction to Systematic Reviews. Cochrane Training, 2016. Available online: https://training.cochrane.org/interactivelearning/module-1-introduction-conducting-systematic-reviews (accessed on 10 January 2022).
- Pickering, C.; Byrne, J. The benefits of publishing systematic quantitative literature reviews for PhD candidates and other early-career researchers. High. Educ. Res. Dev. 2014, 33, 534–548. [Google Scholar] [CrossRef]
- Pittway, L. Systematic literature reviews. In The SAGE Dictionary of Qualitative Management Research; Thorpe, R., Holt, R., Eds.; Sage: New York, NY, USA, 2008; pp. 216–218. [Google Scholar] [CrossRef]
- de Oliveira, R.P.; Lohmann, G.; Oliveira, A.V. A systematic review of the literature on air transport networks (1973–2021). J. Air Transp. Manag. 2022, 103, 102248. [Google Scholar] [CrossRef]
- Stanton, N. Simulators: A review of research and practice. In Human Factors in Nuclear Safety; Stanton, N., Ed.; Taylor & Francis: London, UK, 1996; pp. 117–140. [Google Scholar]
- Saus, E.R.; Johnsen, B.H.; Saus, J.E.R.; Eid, J. Perceived learning outcome: The relationship between experience, realism and situation awareness during simulator training. Int. Marit. Health 2010, 62, 258–264. [Google Scholar]
- Gekara, V.O.; Bloor, M.; Sampson, H. Computer-based assessment in safety-critical industries: The case of shipping. J. Vocat. Educ. Train. 2011, 63, 87–100. [Google Scholar] [CrossRef]
- Young, M.S.; Lenné, M.G. (Eds.) Simulators for Transportation Human Factors: Research and Practice; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar] [CrossRef]
- Danylenko., O.B.; Soroka, O.M.; Dukov, D.F.; Soshnikov, S.G.; Kramarenko, V.V. Application of information and communication technologies and simulators to train future specialists in navigation and ship handling. In Proceedings of the IOP Conference Series: Materials Science and Engineering, Sanya, China, 12–14 November 2021. [Google Scholar]
- Longo, F.; Chiurco, A.; Musmanno, R.; Nicoletti, L. Operative and procedural cooperative training in marine ports. J. Comput. Sci. 2015, 10, 97–107. [Google Scholar] [CrossRef]
- Sencila, V.; Zažeckis, R.; Jankauskas, A.; Eitutis, R. The Use of a Full Mission Bridge Simulator Ensuring Navigational Safety during the Klaipeda Seaport development. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2020, 14, 417–424. [Google Scholar] [CrossRef]
- Sharma, A.; Nazir, S.; Wiig, A.C.; Sellberg, C.; Imset, M.; Mallam, S. Computer supported collaborative learning as an intervention for maritime education and training. In Proceedings of the International Conference on Applied Human Factors and Ergonomics, Orlando, FL, USA, 21–25 July 2018; Springer: Cham, Switzerland; pp. 3–12. [Google Scholar] [CrossRef]
- Benedict, K.; Felsenstein, C.; Baldauf, M. New simulation technology for safety and security training in MET. In Proceedings of the 12th Annual General Assembly of the International Association of Maritime Universities, Gdynia, Poland, 12–14 June 2020. [Google Scholar]
- Benedict, K.; Fischer, S.; Gluch, M.; Kirchhoff, M.; Schaub, M.; Baldauf, M.; Müller, B. Innovative fast time simulation tools for briefing/debriefing in advanced ship handling simulator training and ship operation. Trans. Marit. Sci. 2017, 6, 24–38. [Google Scholar] [CrossRef][Green Version]
- Lin, B.; Feng, L.; Xu, H.; Wang, D. Architecture Design of 5G and Virtual Reality-Based Distributed Simulated Training Platform for Ship Pilots. In Proceedings of the International Conference in Communications, Signal Processing, and Systems, Changbaishan, China, 24–25 July 2021; Springer: Heidelberg, Germany; pp. 2014–2201.
- Shi, C.; Hu, Q. Internet-based integration of multiple ship-handling simulators: An interim report. In Proceedings of the 2005 Proceedings of 6th Annual General Assembly and Conference on International Association of Maritime Universities (IAMU), Malmo, Sweden, 24–26 October 2005; WIT Press: Boston, MA, USA; pp. 55–64. [Google Scholar]
- Mansuy, M.; Candries, M.; Eloot, K. Nautical access study based on real-time bird’s-eye view simulations. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2021, 15, 53–61. [Google Scholar] [CrossRef]
- Song, L.; Xu, S.J.; Yuan, L.H. Three-Dimensional Scene Modeling of Ship Handling Simulator Based on ECT. In Proceedings of the 2012 2nd International Conference on Remote Sensing, Environment and Transportation Engineering, Nanjing, China, 1–3 June 2012; pp. 1–3. [Google Scholar]
- Li, Y.; Jin, Y.; Yin, Y.; Xiao, F. Simulation of nearshore wave based on physical module in real-time. In Proceedings of the 4th International Conference on Computer Science & Education, Singapore, 22–24 October 2009; pp. 767–770. [Google Scholar] [CrossRef]
- Madushani, L.; Weerasinghe, M.; Sandaruwan, D.; Kodikara, N.; Keppitiyagama, C. Real-time realistic ocean wave rendering model for visualization of different sea states. In Proceedings of the 2016 Sixteenth International Conference on Advances in ICT for Emerging Regions (ICTer), Negombo, Sri Lanka, 1–3 September 2016; pp. 193–200. [Google Scholar] [CrossRef]
- Li, Y.; Jin, Y.; Yin, Y.; Shen, H. Simulation of shallow-water waves in coastal region for marine simulator. In Proceedings of the 7th ACM SIGGRAPH International Conference on Virtual-Reality Continuum and Its Applications in Industry, Singapore, 8–9 December 2008; pp. 1–5. [Google Scholar] [CrossRef]
- Zheleznyakova, A.L. Physically-based method for real-time modelling of ship motion in irregular waves. Ocean Eng. 2020, 195, 106686. [Google Scholar] [CrossRef]
- Berg, T.E.; Ringen, E. Validation of ship handling simulation models. In Proceedings of the International Conference on Offshore Mechanics and Arctic Engineering, Rotterdam, The Netherlands, 19–24 June 2011; pp. 705–712. [Google Scholar] [CrossRef]
- Gao, X.; Pan, X.; Liu, X.; Pedrycz, W.; Wang, Z. Modeling of the ship steady turning motion based on multiblocks of fuzzy cognitive maps. Appl. Ocean Res. 2021, 110, 102604. [Google Scholar] [CrossRef]
- Ji, S.; Zhang, Z.; Yang, H.; Liu, D.; Sawhney, R. Application of fractal algorithms of coastline echo’s generation on marine radar simulator. Vis. Eng. 2016, 4, 8. [Google Scholar] [CrossRef]
- Hjelmervik, K.; Nazir, S.; Myhrvold, A. Simulator training for maritime complex tasks: An experimental study. WMU J. Marit. Aff. 2018, 17, 17–30. [Google Scholar] [CrossRef]
- Baldauf, M.; Schröder-Hinrichs, J.U.; Kataria, A.; Benedict, K.; Tuschling, G. Multidimensional simulation in team training for safety and security in maritime transportation. J. Transp. Saf. Secur. 2016, 8, 197–213. [Google Scholar] [CrossRef]
- Lupu, S.; Pocora, A.; Toma, A.; Serban, S. The role and importance of the instructor in achieving learning objectives using simulator techniques in student-centered education. Int. Sci. Conf. Elearning Softw. Educ. 2014, 3, 500. [Google Scholar]
- Sen Do, T.; Hietbrink, E.; Vinh Tran, C. The application of mathematical models and bridge simulations in the feasibility study of ship manoeuvring. In Proceedings of the AGA 2018—19th Annual General Assembly (AGA) of the International Association of Maritime Universities (IAMU), Barcelona, Spain, 17–19 October 2018. [Google Scholar]
- Sellberg, C.; Lindmark, O.; Rystedt, H. Training skills and assessing performance in simulator-based learning environments. In Proceedings of the Global Perspectives in MET: Towards Sustainable, Green and Integrated Maritime Transport, Varna, Bulgaria, 11–14 October 2017; pp. 6–18. [Google Scholar]
- Anonymous. November 10 ‘Kongsberg launches K-Sim Navigation Bridge Simulator, a ‘Step Change’ in Bridge Simulation’ in Professional Mariner. 2014. Available online: https://professionalmariner.com/kongsberg-maritime-launches-k-sim-navigation-a-step-change-in-bridge-simulation (accessed on 23 December 2021).
- Benedict, K.; Baldauf, M.; Gluch, M.; Kirchhoff, M.; Schaub, M.; Tuschling, G.; Gehrke, M. Enhanced fast-time-simulation features to support ship-handling simulator training. In Proceedings of the 19th Annual General Assembly (AGA) of the International Association of Maritime Universities (IAMU), Barcelona, Spain, 17–19 October 2018; pp. 94–112. [Google Scholar]
| Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).



 ,
, 



{kind=link}
{kind=link}
{kind=link}