
Trajectory-Tracking Controller Design of Rotorcraft Using an Adaptive Incremental-Backstepping Approach


Abstract
:1. Introduction
2. Dynamic Model with Uncertainties
2.1. Helicopter Motion Equation
2.2. Incremental Dynamics
3. Least-Squares Estimator
4. Design of Incremental Backstepping Control Law
4.1. Incremental Backstepping Control
4.2. Tuning the Controller Gains
5. Applications and Discussions
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Hu, J.; Gu, H. Survey on Flight Control Technology for Large-Scale Helicopter. Int. J. Aerosp. Eng. 2017, 2017, 1–14. [Google Scholar] [CrossRef]
- Frost, C.R.; Hindson, W.S.; Moralez, E.; Tucker, G.E.; Dryfoos, J.B. Design and testing of flight control laws on the rascal research helicopter. In Proceedings of the AIAA Modelilng and Simulation Technologies Conference Exhibit, Monterey, CA, USA, 5–8 August 2002; pp. 1–11. [Google Scholar] [CrossRef]
- Harding, J.; Moody, S.J.; Jeram, G.J.; Mansur, M.H.; Tischler, M.B. Development of Modern Control Laws for the AH-64D in Hover/Low Speed Flight. In Proceedings of the 62nd Annual Forum of the American Helicopter Society, Phoenix, AZ, USA, 9–11 May 2006. [Google Scholar]
- Padfield, G.D. Helicopter Flight Dynamics; Blackwell: Oxford, UK, 2018; ISBN 9781405118170. [Google Scholar]
- Van Ekeren, W.; Looye, G.; Kuchar, R.; Chu, Q.; Van Kampen, E.J. Design, implementation and flight-test of incremental backstepping flight control laws. In Proceedings of the AIAA Guidance, Navigation, and Control Conference 2018, Kissimmee, FL, USA, 8–12 January 2018; pp. 1–21. [Google Scholar] [CrossRef]
- Ireland, M.L.; Vargas, A.; Anderson, D. A comparison of closed-loop performance of multirotor configurations using non-linear dynamic inversion control. Aerospace 2015, 2, 325–352. [Google Scholar] [CrossRef]
- Horn, J.F. Non-linear dynamic inversion control design for rotorcraft. Aerospace 2019, 6, 38. [Google Scholar] [CrossRef] [Green Version]
- Zou, Y.; Zheng, Z. A Robust Adaptive RBFNN Augmenting Backstepping Control Approach for a Model-Scaled Helicopter. IEEE Trans. Control Syst. Technol. 2015, 23, 2344–2352. [Google Scholar] [CrossRef]
- Xian, B.; Guo, J.; Zhang, Y. Adaptive backstepping tracking control of a 6-DOF unmanned helicopter. IEEE/CAA J. Autom. Sin. 2015, 2, 19–24. [Google Scholar] [CrossRef]
- Yan, K.; Wu, Q.; Chen, M. Robust adaptive backstepping control for unmanned autonomous helicopter with flapping dynamics. In Proceedings of the IEEE International Conference on Control and Automation (ICCA), Ohrid, Macedonia, 3–6 July 2017. [Google Scholar]
- Ahmed, M.; Subbarao, K. Target tracking in 3-D using estimation based nonlinear control laws for UAVs. Aerospace 2016, 3, 5. [Google Scholar] [CrossRef]
- Nafia, N.; El Kari, A.; Ayad, H.; Mjahed, M. Robust Full Tracking Control Design of Disturbed Quadrotor UAVs with Unknown Dynamics. Aerospace 2018, 5, 115. [Google Scholar] [CrossRef] [Green Version]
- Spurgeon, S.K.; Edwards, C.; Foster, N.P. Robust Model Reference Control Using a Sliding Mode Controller/Observer Scheme with Application to a Helicopter Problem. Available online: ieeexplore.ieee.org (accessed on 25 August 2021).
- McGeoch, D.J.; McGookin, E.W.; Houston, S.S. MIMO sliding mode attitude command flight control system for a helicopter. In Proceedings of the Collection of Technical Papers—AIAA Guidance, Navigation, and Control Conference, San Francisco, CA, USA, 15–18 August 2005; Volume 6. [Google Scholar]
- Madani, T.; Benallegue, A. Backstepping sliding mode control applied to a miniature quadrotor flying robot. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; pp. 700–705. [Google Scholar] [CrossRef]
- Madani, T.; Benallegue, A. Sliding mode observer and backstepping control for a quadrotor unmanned aerial vehicles. In Proceedings of the 2007 American Control Conference, New York, NY, USA, 9–13 July 2007; pp. 5887–5892. [Google Scholar] [CrossRef]
- Kwan, C.; Lewis, F.L. Robust backstepping control of nonlinear systems using neural networks. IEEE Trans. Syst. Man Cybern. Part A Syst. Humans 2000, 30, 753–766. [Google Scholar] [CrossRef]
- Lee, T.; Kim, Y. Nonlinear adaptive flight control using backstepping and neural networks controller. J. Guid. Control. Dyn. 2001, 24, 675–682. [Google Scholar] [CrossRef]
- Ji, C.H.; Kim, C.S.; Kim, B.S. A hybrid incremental nonlinear dynamic inversion control for improving flying qualities of asymmetric store configuration aircraft. Aerospace 2021, 8, 126. [Google Scholar] [CrossRef]
- Simplício, P. Helicopter Nonlinear Flight Control: An Acceleration Measurements-based Approach Using Nonlinear Dynamic Inversion. Control. Eng. Pract. 2011, 21, 1065–1077. [Google Scholar] [CrossRef]
- van Gils, P.; van Kampen, E.; de Visser, C.C.; Chu, Q.P. Adaptive incremental backstepping flight control for a high-performance aircraft with uncertainties. In Proceedings of the AIAA GuidanceNavigation, and Control Conference, San Diego, CA, USA, 4–8 January 2016. [Google Scholar] [CrossRef]
- Ignatyev, D.I.; Shin, H.S.; Tsourdos, A. Two-layer adaptive augmentation for incremental backstepping flight control of transport aircraft in uncertain conditions. Aerosp. Sci. Technol. 2020, 105, 106051. [Google Scholar] [CrossRef]
- Jeon, B.J.; Seo, M.G.; Shin, H.S.; Tsourdos, A. Understandings of the Incremental Backstepping Control Through Theoretical Analysis under the Model Uncertainties. In Proceedings of the 2018 IEEE Conference on Control Technology and Applications (CCTA), Copenhagen, Denmark, 21–24 August 2018; pp. 318–323. [Google Scholar] [CrossRef] [Green Version]
- Smeur, E.J.J.; Chu, Q.; De Croon, G.C.H.E. Adaptive incremental nonlinear dynamic inversion for attitude control of micro air vehicles. J. Guid. Control. Dyn. 2016, 39, 450–461. [Google Scholar] [CrossRef] [Green Version]
- Ali, A.A.H.; Chu, Q.P.; Van Kampen, E.; De Visser, C.C. Exploring adaptive incremental backstepping using immersion and invariance for an F-16 aircraft. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MD, USA, 13–17 January 2014. [Google Scholar] [CrossRef]
- Chang, J.; Guo, Z.; Cieslak, J.; Chen, W. Integrated guidance and control design for the hypersonic interceptor based on adaptive incremental backstepping technique. Aerosp. Sci. Technol. 2019, 89, 318–332. [Google Scholar] [CrossRef]
- Fortescue, T.R.; Kershenbaum, L.S.; Ydstie, B.E. Implementation of self-tuning regulators with variable forgetting factors. Automatica 1981, 17, 831–835. [Google Scholar] [CrossRef]
- Vaiopoulos, P.; Zogopoulos-Papaliakos, G.; Kyriakopoulos, K.J. Online Aerodynamic Model Identification on Small Fixed-Wing UAVs with Uncertain Flight Data. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 6587–6592. [Google Scholar] [CrossRef]
- Campbell, S.F.; Nguyen, N.T.; Kaneshige, J.; Krishnakumar, K. Parameter estimation for a hybrid adaptive flight controller. In Proceedings of the AIAA Infotech@Aerospace Conference, Seattle, WA, USA, 6–9 April 2009; pp. 1–28. [Google Scholar] [CrossRef] [Green Version]
- Bittanti, S.; Bolzern, P.; Campi, M. Convergence and exponential convergence of identification algorithms with directional forgetting factor. Automatica 1990, 26, 929–932. [Google Scholar] [CrossRef]
- Cao, L.; Schwartz, H. Directional forgetting algorithm based on the decomposition of the information matrix. Automatica 2000, 36, 1725–1731. [Google Scholar] [CrossRef]
- Yun, Y.-H.; Kim, C.-J.; Shin, K.-C.; Yang, C.-D.; Cho, I.-J. Building the Flight Dynamic Analysis Program, HETLAS, for the Development of Helicopter FBW System. In Proceedings of the 1st Asian Australian Rotorcraft Forum and Exhibition 2012, Busan, Korea, 12–15 February 2012; pp. 12–15. [Google Scholar]
- Yang, C.-D.; Kim, C.-J.; Yang, S.-S. Rotorcraft Waypoint Guidance Design Using SDRE Controller. Int. J. Aeronaut. Space Sci. 2009, 10, 12–22. [Google Scholar] [CrossRef]
- Ovaska, S.J.; Väliviita, S. Angular acceleration measurement: A review. IEEE Trans. Instrum. Meas. 1998, 47, 1211–1217. [Google Scholar] [CrossRef]
- Han, J.D.; He, Y.Q.; Xu, W.L. Angular acceleration estimation and feedback control: An experimental investigation. Mechatronics 2007, 17, 524–532. [Google Scholar] [CrossRef] [Green Version]
- Åström, K.J.; Wittenmark, B. Adaptive Control, 2nd ed.; Addison-Wesley: Boston, MA, USA, 1995. [Google Scholar]
- Kim, M.; Kim, Y.; Jun, J. Adaptive sliding mode control using slack variables for affine underactuated systems. In Proceedings of the 2012 IEEE 51st IEEE Conference on Decision and Control (CDC), Maui, HI, USA, 10–13 December 2012; pp. 6090–6095. [Google Scholar] [CrossRef]
- Lee, D.; Kim, H.J.; Sastry, S. Feedback linearization vs. adaptive sliding mode control for a quadrotor helicopter. Int. J. Control Autom. Syst. 2009, 7, 419–428. [Google Scholar] [CrossRef]
- Baskett, B.J. Aeronautical Design Standard Performance Specification Handling Qualities Requirements for Military Rotorcraft; ADS-33E-PRF; US Army Aviation and Missile Command: Redstone Arsenal, AL, USA, 2000. [Google Scholar]
- Wang, X.; van Kampen, E.J. Incremental backstepping sliding mode fault-tolerant flight control. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; pp. 1–23. [Google Scholar] [CrossRef]
- Morelli, E.A. Multiple input design for real-time parameter estimation in the frequency domain. IFAC Proc. Vol. 2003, 36, 639–644. [Google Scholar] [CrossRef] [Green Version]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
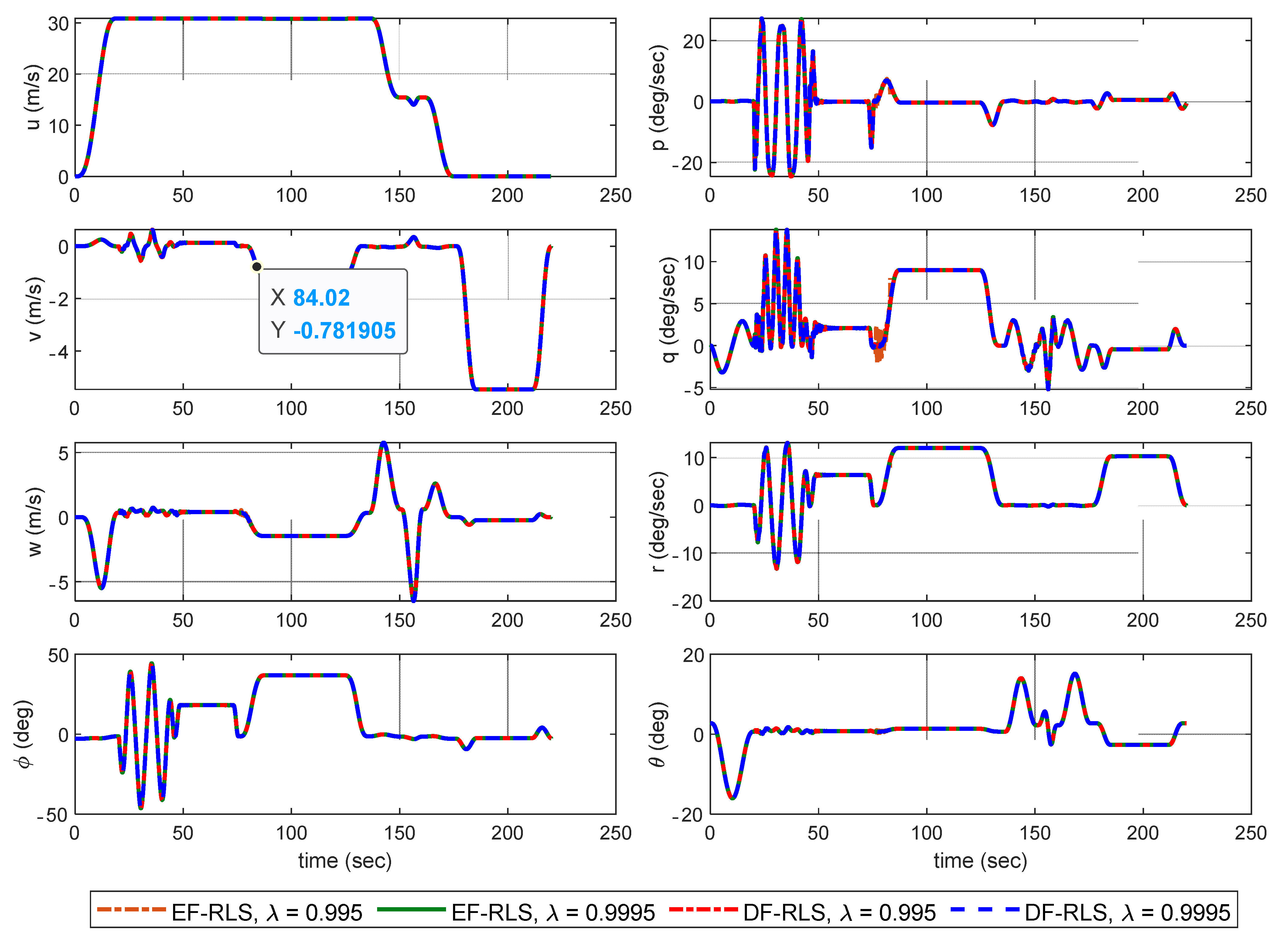
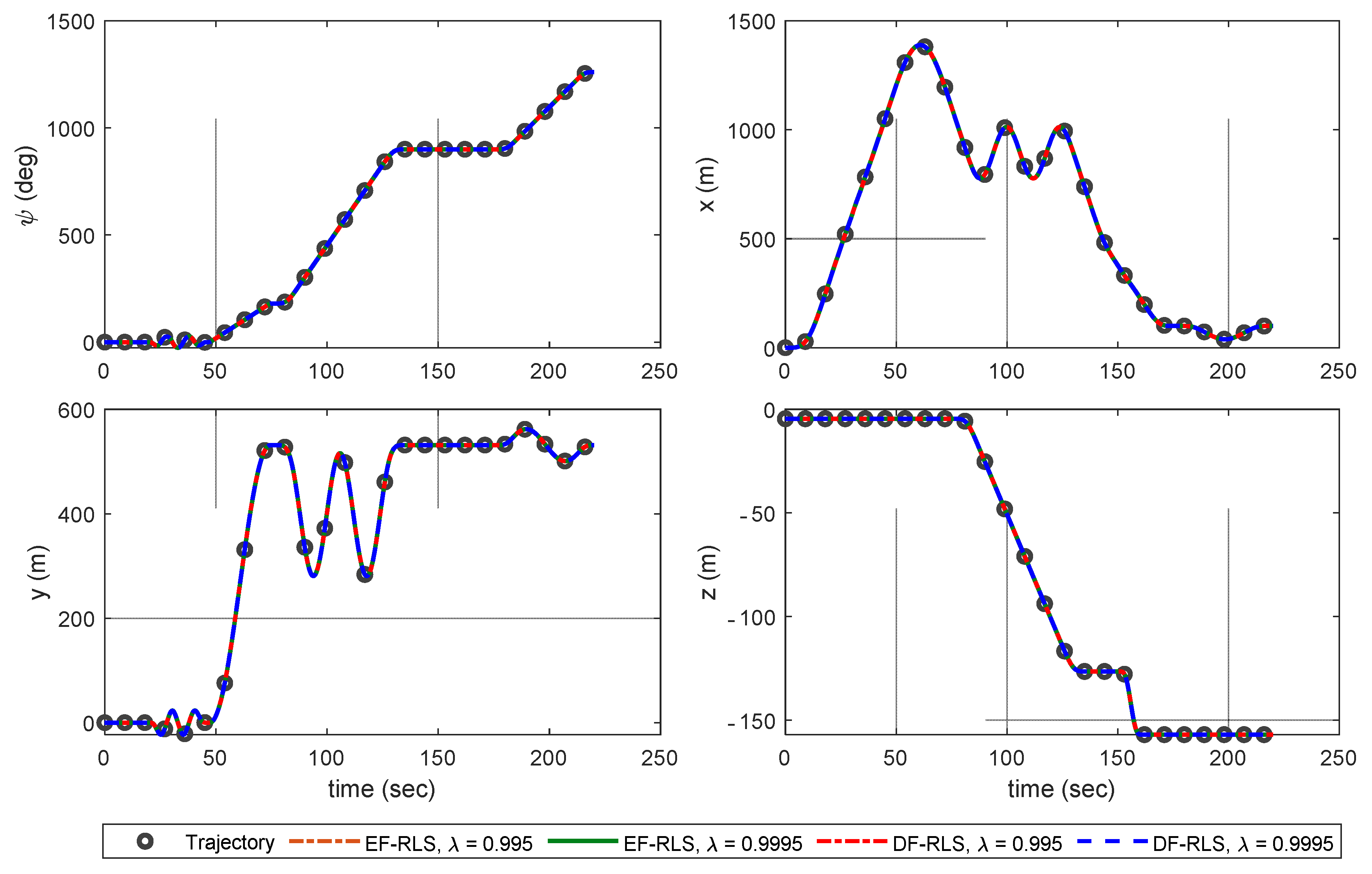
| Maneuvers | Time Length (s) | Velocity Range (kts) | Notes |
|---|---|---|---|
| Initial Condition | 0 | Hover | Initial Height: 100 ft |
| Acceleration | 0~20 | 0 to 60 | / |
| Slalom | 20~45 | 60 | / |
| Transient Turn | 45~75 | 60 | 180 deg turn |
| Helical Turn | 75~135 | 60 | 720 deg turn |
| Deceleration | 135~150 | 60~30 | / |
| Pop up | 150~160 | 30 | 100ft ascent |
| Deceleration | 160~175 | 30~0 | / |
| Pirouette | 175~220 | 0 | Radius: 100 ft |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jung, U.; Cho, M.-G.; Woo, J.-W.; Kim, C.-J. Trajectory-Tracking Controller Design of Rotorcraft Using an Adaptive Incremental-Backstepping Approach. Aerospace 2021, 8, 248. https://doi.org/10.3390/aerospace8090248
Jung U, Cho M-G, Woo J-W, Kim C-J. Trajectory-Tracking Controller Design of Rotorcraft Using an Adaptive Incremental-Backstepping Approach. Aerospace. 2021; 8(9):248. https://doi.org/10.3390/aerospace8090248
Chicago/Turabian StyleJung, Useok, Moon-Gyeang Cho, Ji-Won Woo, and Chang-Joo Kim. 2021. "Trajectory-Tracking Controller Design of Rotorcraft Using an Adaptive Incremental-Backstepping Approach" Aerospace 8, no. 9: 248. https://doi.org/10.3390/aerospace8090248
APA StyleJung, U., Cho, M.-G., Woo, J.-W., & Kim, C.-J. (2021). Trajectory-Tracking Controller Design of Rotorcraft Using an Adaptive Incremental-Backstepping Approach. Aerospace, 8(9), 248. https://doi.org/10.3390/aerospace8090248