Evaluation of Time Difference of Arrival (TDOA) Networks Performance for Launcher Vehicles and Spacecraft Tracking




Abstract
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Proposed Method
2.1. Linear Least Squares (LLS) Method for TDOA Positioning
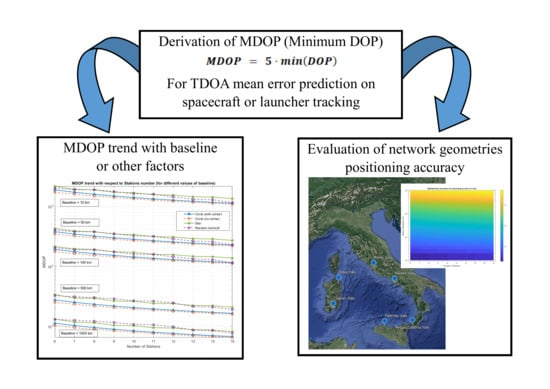
2.2. Evaluation of Minimum DOP (MDOP)
- Minimum set of sensors (5), disposed on a circle configuration (1 station at the circle center, the other 4 homogeneously spaced in azimuth at 0 altitude);
- Baseline varying from 1 km to 1000 km;
- Evaluation of the DOP from 0 to 90 degrees in elevation with 5 degree steps, from 0 to 360 degrees in azimuth with 10 degree steps;
- 1000 Monte Carlo runs executed for each error evaluation, on each position of the target in the celestial vault;
- 0.1 μs error assumed for each single sensor, needed for computing the position estimation error.
3. Results: Performance Evaluation of TDOA Networks
- Circle with center configurations: out of N stations, N-1 are disposed and equispaced in azimuth on a circumference, the last station is placed at the circumference center;
- Circle without center configurations: N stations disposed on a circumference and equispaced, without a center station;
- Star configuration: out of N stations, N/2 are disposed on a circumference of radius R (diameter equal to the commanded baseline), the other N/2 (or the lower integer, if the stations number is odd) are disposed and equally spaced on a circumference of radius R/2 (baseline equal to one half of the commanded baseline). The azimuth of the inner circle stations is equal to the bisector of the stations of the outer circle.
- Random azimuth configuration: stations disposed on a circumference, without the center station, but with randomized azimuth angles.
3.1. Distance
3.2. Target Altitude
3.3. Number of Stations
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- McDowell, J.C. The Low Earth Orbit Satellite Population and Impacts of the SpaceX Starlink Constellation. Astrophys. J. Lett. 2020, 892, L36. [Google Scholar] [CrossRef]
- Santoro, F.; Del Bianco, A.; Viola, N.; Fusaro, R.; Albino, V.; Binetti, M.; Marzioli, P. Spaceport and Ground Segment assessment for enabling operations of suborbital transportation systems in the Italian territory. Acta Astronaut. 2018, 152, 396–407. [Google Scholar] [CrossRef]
- Bonnal, C.; Francillout, L.; Moury, M.; Aniakou, U.; Dolado Perez, J.-C.; Mariez, J.; Michel, S. CNES technical considerations on space traffic management. Acta Astronaut. 2020, 167, 296–301. [Google Scholar] [CrossRef]
- Sciré, G.; Santoni, F.; Piergentili, F. Analysis of orbit determination for space based optical space surveillance system. Adv. Space Res. 2015, 56, 421–428. [Google Scholar] [CrossRef]
- Geeraert, J.L.; McMahon, J.W.; Jones, B.A. Orbit determination observability of the dual-satellite geolocation system with TDOA and FDOA. In Proceedings of the AIAA/AAS Astrodynamics Specialist Conference, Long Beach, CA, USA, 13–16 September 2016. [Google Scholar] [CrossRef]
- Hadji Hossein, S.; Acernese, M.; Cardona, T.; Cialone, G.; Curianò, F.; Mariani, L.; Marini, V.; Marzioli, P.; Parisi, L.; Piergentili, F.; et al. Sapienza Space debris Observatory Network (SSON): A high coverage infrastructure for space debris monitoring. J. Space Saf. Eng. 2019, 7, 30–37. [Google Scholar] [CrossRef]
- Chestnut, P.C. Emitter Location Accuracy Using TDOA and Differential Doppler. IEEE Trans. Aerosp. Electron. Syst. 1982, 2, 214–218. [Google Scholar] [CrossRef]
- Guo, F.C.; Fan, Y. A method of dual-satellites geolocation using TDOA and FDOA and its precision analysis. J. Astronaut. 2008, 29, 1381–1386. [Google Scholar]
- Dersan, A.; Tanik, Y. Passive Radar Localization by Time Difference of Arrival; IEEE: Piscataway, NJ, USA, 2002; Volume 2, pp. 1251–1257. [Google Scholar]
- Marzioli, P.; Frezza, L.; Amadio, D.; Santoro, F.; Romanelli, C.; Piergentili, F.; Santoni, F. Innovative tracking systems test on-board a stratospheric balloon: The STRAINS Experiment (paper code IAC-19,B2,4,8,x53632). In Proceedings of the 70th International Astronautical Congress (IAC), Washington, DC, USA, 21–25 October 2019. [Google Scholar]
- Díez-González, J.; Álvarez, R.; Prieto-Fernández, N.; Perez, H. Local Wireless Sensor Networks Positioning Reliability under Sensor Failure. Sensors 2020, 20, 1426. [Google Scholar] [CrossRef] [PubMed]
- Carotenuto, R.; Merenda, M.; Iero, D.; Della Corte, F.G. Mobile Synchronization Recovery for Ultrasonic Indoor Positioning. Sensors 2020, 20, 702. [Google Scholar] [CrossRef] [PubMed]
- Stefański, J. Hyperbolic Position Location Estimation in the Multipath Propagation Environment. In Wireless and Mobile Networking, Proceedings of the Joint IFIP Wireless and Mobile Networking Conference, Gdańsk, Poland, 9–11 September 2009; Wozniak, J., Konorski, J., Katulski, R., Pach, A.R., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 232–239. [Google Scholar]
- Khalaf-Allah, M. Performance Comparison of Closed-Form Least Squares Algorithms for Hyperbolic 3-D Positioning. J. Sens. Actuator Netw. 2020, 9, 2. [Google Scholar] [CrossRef]
- International Telecommunication Union, ITU Spectrum Management. Available online: https://www.itu.int/pub/R-REP-SM (accessed on 31 August 2020).
- International Telecommunication Union, ITU. ITU Handbook: Mobile-Satellite Service (MSS) 2002; ITU: Geneva, Switzerland, 2002. [Google Scholar]
- International Amateur Radio Union, IARU. Amateur Radio Satellite Frequency Coordination. 2020. Available online: https://www.iaru.org/reference/satellites/ (accessed on 31 August 2020).
- di Palo, L.; Garofalo, R.; Bedetti, E.; Celesti, P.; Iovanna, F.; Frezza, L.; Marzioli, P.; Piergentili, F.; Volpe, A.; Curianò, F.; et al. Time Difference of Arrival for stratospheric balloon tracking: Design and development of the STRAINS Experiment. In Proceedings of the 2020 IEEE 7th International Workshop on Metrology for AeroSpace (MetroAeroSpace), Pisa, Italy, 22–24 June 2020; pp. 362–366. [Google Scholar]
- Marzioli, P.; Frezza, L.; Curianò, F.; Pellegrino, A.; Gianfermo, A.; Angeletti, F.; Arena, L.; Cardona, T.; Valdatta, M.; Santoni, F.; et al. Experimental validation of VOR (VHF Omni Range) navigation system for stratospheric flight. Acta Astronaut. 2021, 178, 423–431. [Google Scholar] [CrossRef]
- Di Palo, L.; Bandini, V.; Bedetti, E.; Broggi, G.; Collettini, L.; Celesti, P.; Di Ienno, D.; Garofalo, R.; Iovanna, F.; Mattei, G.; et al. VOR (VHF Omnidirectional Range) Based Attitude and Position Determination System on a Stratospheric Balloon: TARDIS Experiment; IEEE: Turin, Italy, 2019. [Google Scholar]
- Chen, Y.-H.; Juang, J.-C.; Seo, J.; Lo, S.; Akos, D.M.; Lorenzo, D.S.; Enge, P. Design and implementation of real-time software radio for anti-interference GPS/WAAS sensors. Sensors 2012, 12, 13417–13440. [Google Scholar] [CrossRef] [PubMed]
- Menchinelli, A.; Ingiosi, F.; Pamphili, L.; Marzioli, P.; Patriarca, R.; Costantino, F.; Piergentili, F. A Reliability Engineering Approach for Managing Risks in CubeSats. Aerospace 2018, 5, 121. [Google Scholar] [CrossRef]
- Cavaleri, A.; Motella, B.; Pini, M.; Fantino, M. Detection of Spoofed GPS Signals at Code and Carrier Tracking Level; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar]
- Fernández-Prades, C.; Presti, L.L.; Falletti, E. Satellite radiolocalization from GPS to GNSS and beyond: Novel technologies and applications for civil mass market. Proc. IEEE 2011, 99, 1882–1904. [Google Scholar] [CrossRef]
- Abdul-Latif, O.; Shepherd, P.; Pennock, S. TDoA/AoA Data Fusion for Enhancing Positioning in an Ultra Wideband System; IEEE: Piscataway, NJ, USA, 2007; pp. 1531–1534. [Google Scholar]
- Sarwar, U.; Cheema, K.; Reid, T. Contabat: Designing and Prototyping an Attachable Sports Analytics Device that Provides Ball-Bat Impact Location for Performance Enhancement; American Society of Mechanical Engineers: New York, NY, USA, 2019; Volume 7. [Google Scholar]
- MacCurdy, R.; Gabrielson, R.; Spaulding, E.; Purgue, A.; Cortopassi, K.; Fristrup, K. Automatic animal tracking using matched filters and time difference of arrival. J. Commun. 2009, 4, 487–495. [Google Scholar] [CrossRef]
- Weiser, A.W.; Orchan, Y.; Nathan, R.; Charter, M.; Weiss, A.J.; Toledo, S. Characterizing the Accuracy of a Self-Synchronized Reverse-GPS Wildlife Localization System; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Bard, J.D.; Ham, F.M. Time difference of arrival dilution of precision and applications. IEEE Trans. Signal Process. 1999, 47, 521–523. [Google Scholar] [CrossRef]
- Kaplan, E.; Hegarty, C. Understanding GPS: Principles and Applications. In Artech House Mobile Communications Series, 2nd ed.; Kaplan, E.D., Hegarty, C., Eds.; Artech House: Boston, MA, USA, 2006; ISBN 978-1-58053-894-7. [Google Scholar]
- Cakir, O.; Yazgan, A.; Kaya, I. Accuracy comparison of time difference of arrival based source localization methods. In Proceedings of the 2015 38th International Conference on Telecommunications and Signal Processing (TSP), Prague, Czech Republic, 9–11 July 2015; pp. 1–4. [Google Scholar]
- Chan, Y.T.; Ho, K.C. A simple and efficient estimator for hyperbolic location. IEEE Trans. Signal Process. 1994, 42, 1905–1915. [Google Scholar] [CrossRef]
- Fiorentin, P.; Bettanini, C.; Bogoni, D. Calibration of an autonomous instrument for monitoring light pollution from drones. Sensors 2019, 19, 5091. [Google Scholar] [CrossRef] [PubMed]
- Wu, P.; Su, S.; Zuo, Z.; Guo, X.; Sun, B.; Wen, X. Time Difference of Arrival (TDoA) Localization Combining Weighted Least Squares and Firefly Algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef] [PubMed]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Marzioli, P.; Santoni, F.; Piergentili, F. Evaluation of Time Difference of Arrival (TDOA) Networks Performance for Launcher Vehicles and Spacecraft Tracking. Aerospace 2020, 7, 151. https://doi.org/10.3390/aerospace7100151
Marzioli P, Santoni F, Piergentili F. Evaluation of Time Difference of Arrival (TDOA) Networks Performance for Launcher Vehicles and Spacecraft Tracking. Aerospace. 2020; 7(10):151. https://doi.org/10.3390/aerospace7100151
Chicago/Turabian StyleMarzioli, Paolo, Fabio Santoni, and Fabrizio Piergentili. 2020. "Evaluation of Time Difference of Arrival (TDOA) Networks Performance for Launcher Vehicles and Spacecraft Tracking" Aerospace 7, no. 10: 151. https://doi.org/10.3390/aerospace7100151
APA StyleMarzioli, P., Santoni, F., & Piergentili, F. (2020). Evaluation of Time Difference of Arrival (TDOA) Networks Performance for Launcher Vehicles and Spacecraft Tracking. Aerospace, 7(10), 151. https://doi.org/10.3390/aerospace7100151