Large-Scale Path-Dependent Optimization of Supersonic Aircraft

 , , , and
, , , and
Abstract
1. Introduction
2. Disciplinary Models
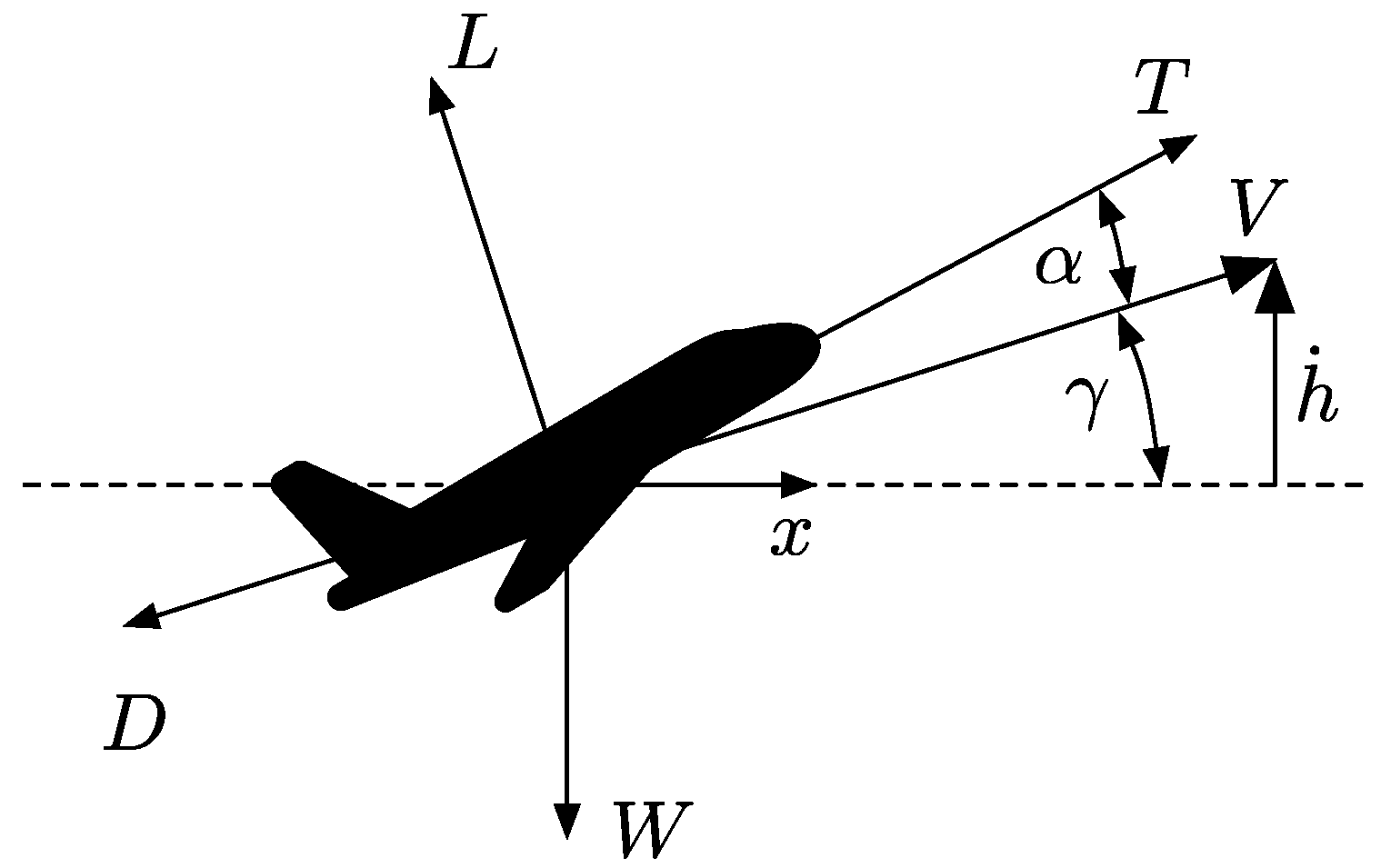
2.1. Flight Dynamics
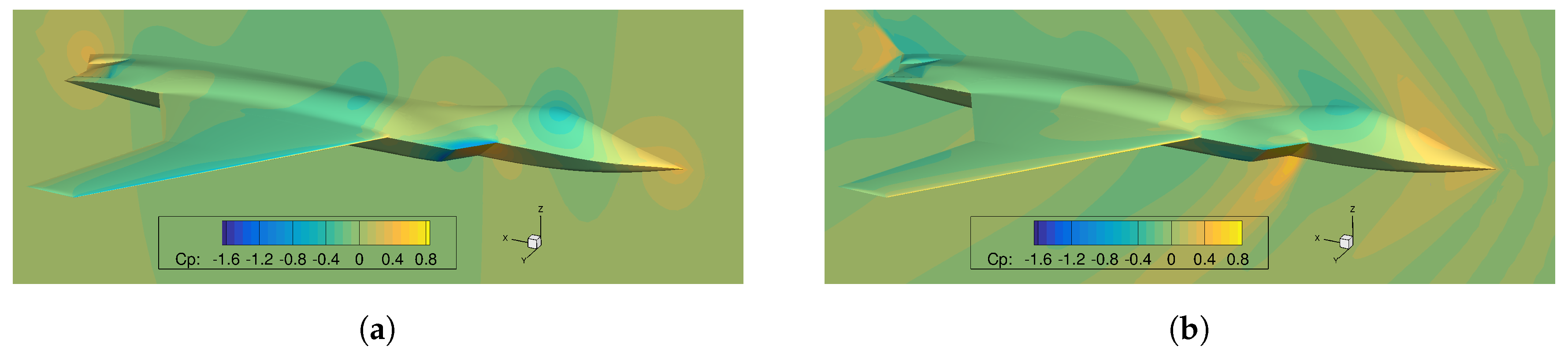
2.2. Aerodynamic Modeling
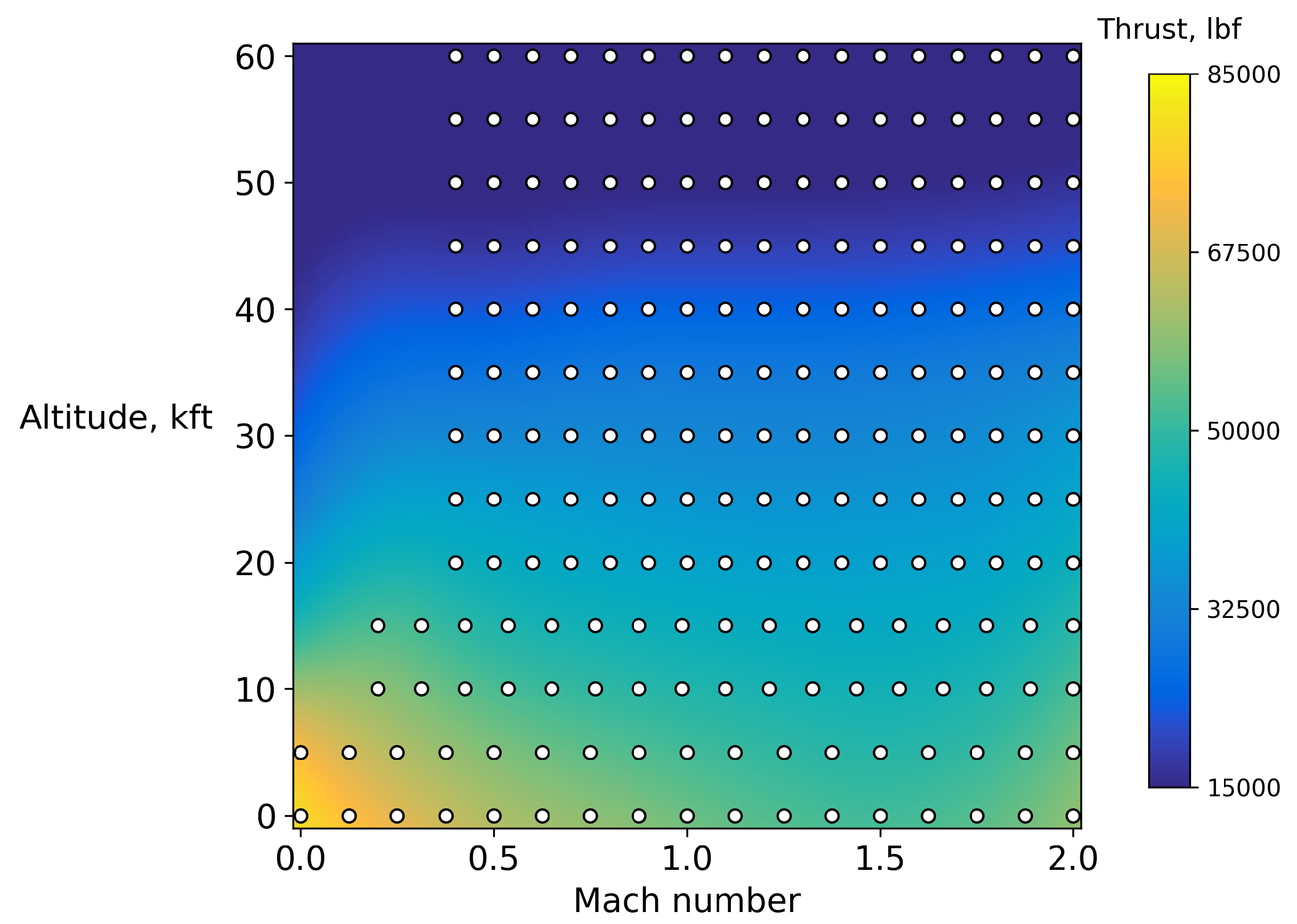
2.3. Propulsion Systems
- Run the engine at the fixed design point and an off-design point
- Save the resulting states and performance data
- Train the surrogate model using the saved states data
- Repeat steps 1–3 for all points in the flight envelope by varying the off-design analysis point flight conditions
2.4. Thermal Systems
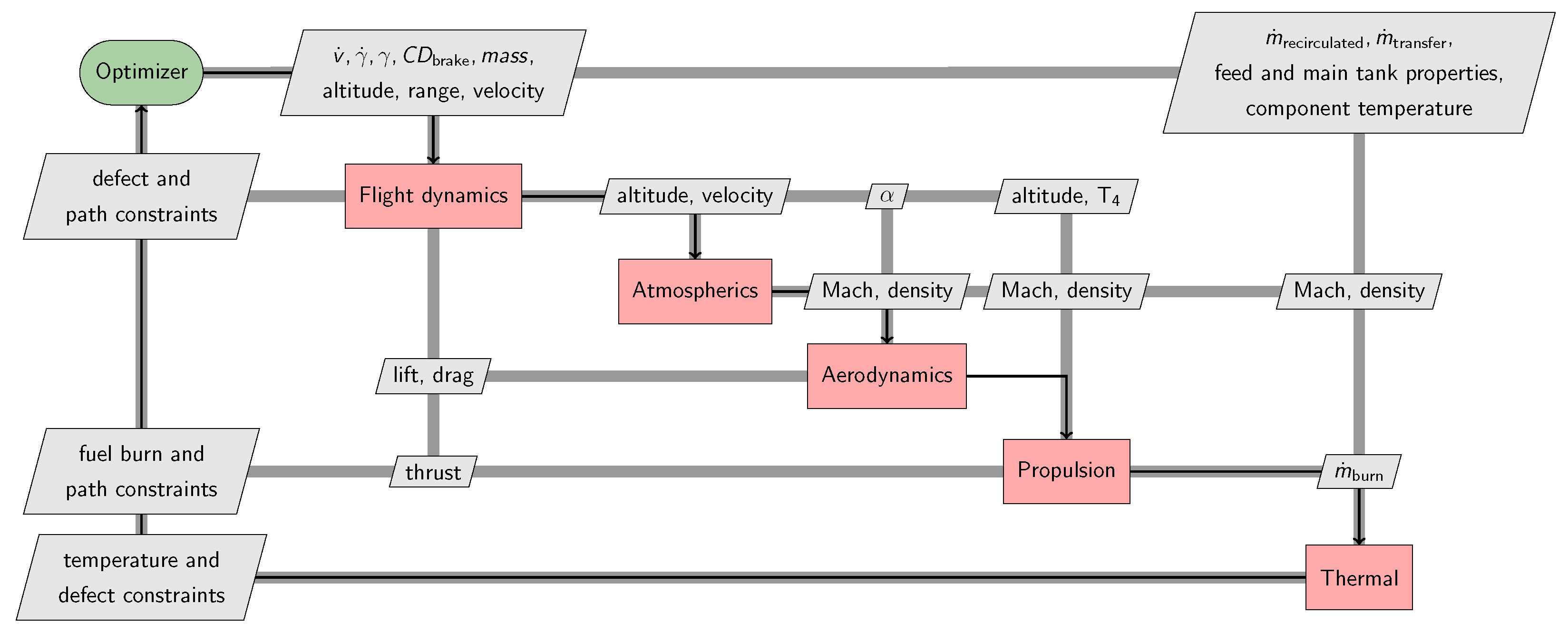
2.5. Multidisciplinary Model Setup
3. Optimization Methodology and Formulation
3.1. Optimization Framework: OpenMDAO
3.2. Mission Integration Tool: Dymos
4. Optimization Problem Results
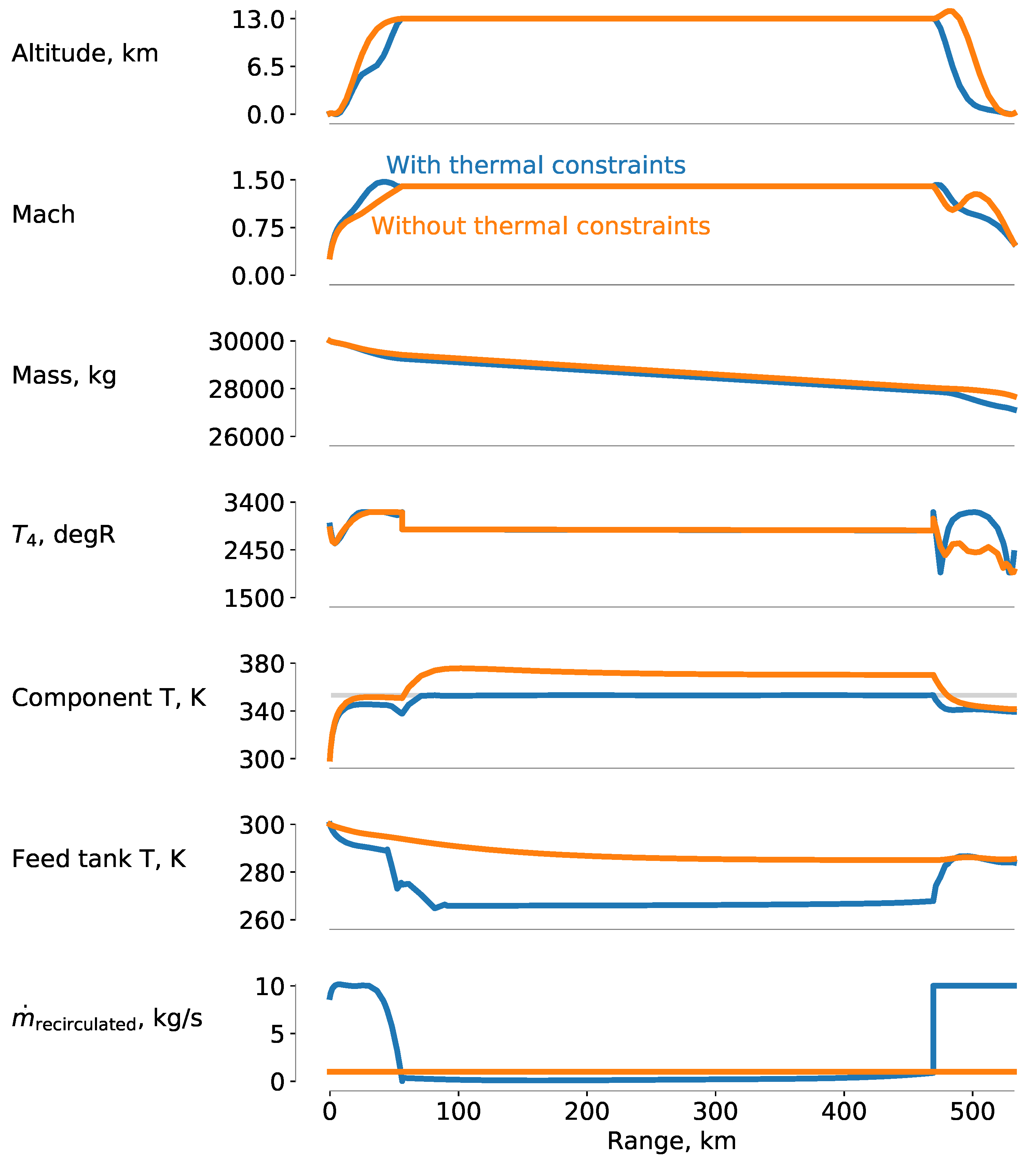
4.1. Thermally-Constrained Mission Optimization
4.2. Cruise-Mission Endurance Optimization
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| MDO | multidisciplinary design optimization |
| FTMS | fuel thermal management system |
| CFD | computational fluid dynamics |
| AFRL | Air Force Research Laboratory |
| TMS | thermal management system |
| RANS | Reynolds-averaged Navier–Stokes |
| ODE | ordinary differential equation |
| ESAV | Efficient Supersonic Air Vehicle |
| SMT | Surrogate Modeling Toolbox |
| NPSS | Numerical Propulsion System Simulation |
References
- Kaiser, F. The Climb of Jet-Propelled Aircraft, Part I. Speed Along the Path of Optimum Climb; RTP/TIB Translation No. Tech. Rep. GDC/15/14ST; Ministry of Supply (Gt. Brit.): London, UK, 1944.
- Faulders, C. Low-Thrust Rocket Steering Program for Minimum Time Transfer between Planetary Orbits; Technical Report; SAE Technical Paper: Warrendale, PA, USA, 1958. [Google Scholar]
- Bryson, A.E., Jr.; Ross, S.E. Optimum rocket trajectories with aerodynamic drag. J. Jet Propuls. 1958, 28, 465–469. [Google Scholar] [CrossRef]
- Kelley, H.J. Gradient theory of optimal flight paths. ARS J. 1960, 30, 947–954. [Google Scholar] [CrossRef]
- Kelley, H.J. An investigation of optimal zoom climb techniques. J. Aerosp. Sci. 1959, 26, 794–802. [Google Scholar] [CrossRef]
- Bryson, A.E.; Denham, W.F. A steepest-ascent method for solving optimum programming problems. J. Appl. Mech. 1962, 29, 247–257. [Google Scholar] [CrossRef]
- Bryson, A.E. Optimal control-1950 to 1985. IEEE Control Syst. Mag. 1996, 16, 26–33. [Google Scholar] [CrossRef]
- Hale, A.L.; Dahl, W.; Lisowski, J. Optimal simultaneous structural and control design of maneuvering flexible spacecraft. J. Guid. Control Dyn. 1985, 8, 86–93. [Google Scholar] [CrossRef]
- Miller, D.F.; Shim, J. Gradient-based combined structural and control optimization. J. Guid. Control Dyn. 1987, 10, 291–298. [Google Scholar] [CrossRef]
- Belvin, W.K.; Park, K. Structural tailoring and feedback control synthesis-An interdisciplinary approach. J. Guid. Control Dyn. 1990, 13, 424–429. [Google Scholar] [CrossRef]
- Onoda, J.; Haftka, R.T. An approach to structure/control simultaneous optimization for large flexible spacecraft. AIAA J. 1987, 25, 1133–1138. [Google Scholar] [CrossRef]
- Clive, P.D.; Johnson, J.A.; Moss, M.J.; Zeh, J.M.; Birkmire, B.M.; Hodson, D.D. Advanced Framework for Simulation, Integration and Modeling (AFSIM)(Case Number: 88ABW-2015-2258). In Proceedings of the International Conference on Scientific Computing (CSC). The Steering Committee of The World Congress in Computer Science, Computer, Las Vegas, NV, USA, 27–30 July 2015; p. 73. [Google Scholar]
- Reuter, R.A.; Iden, S.; Snyder, R.D.; Allison, D.L. An overview of the optimized integrated multidisciplinary systems program. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; p. 0674. [Google Scholar]
- Alyanak, E.J.; Allison, D.L. Multi-Parameter Performance Evaluation, the Next Step in Conceptual Design Concept Assessment. In Proceedings of the 56th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015; p. 0648. [Google Scholar]
- Allison, D.L.; Kolonay, R.M. Expanded MDO for Effectiveness Based Design Technologies: EXPEDITE Program Introduction. In Proceedings of the 2018 Multidisciplinary Analysis and Optimization Conference, Atlanta, GA, USA, 25–29 June 2018; p. 3419. [Google Scholar]
- Davies, C.C. Lockheed Martin Overview of the AFRL EXPEDITE Program. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019; p. 0173. [Google Scholar]
- Clark, D.L., Jr.; Allison, D.L.; Bae, H.; Forster, E.E. Effectiveness-Based Design of an Aircraft Considering Mission Uncertainties. J. Aircr. 2019, 56, 1–12. [Google Scholar] [CrossRef]
- Bodie, M.; Russell, G.; McCarthy, K.; Lucas, E.; Zumberge, J.; Wolff, M. Thermal analysis of an integrated aircraft model. In Proceedings of the 48th AIAA Aerospace Sciences Meeting Including the New Horizons Forum and Aerospace Exposition, Orlando, FL, USA, 4–7 January 2010; p. 288. [Google Scholar]
- Alyanak, E.J.; Allison, D.L. Fuel Thermal Management System Consideration in Conceptual Design Sizing. In Proceedings of the 57th AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, San Diego, CA, USA, 4–8 January 2016; p. 0670. [Google Scholar]
- Klatt, N.D. On-Board Thermal Management of Waste Heat from a High-Energy Device; Technical Report; Air Force Institute of Technology at Wright-Patterson Air Force Base: Dayton, OH, USA, 2008. [Google Scholar]
- DeSimio, M.P.; Hencey, B.M.; Parry, A.C. Online prognostics for fuel thermal management system. In Proceedings of the ASME 2015 Dynamic Systems and Control Conference, Columbus, OH, USA, 28–30 October 2015; American Society of Mechanical Engineers: New York, NY, USA, 2015; p. V001T08A003. [Google Scholar]
- Gvozdich, G.; Weise, P.; von Spakovsky, M. INVENT: Study of the Issues Involved in Integrating a Directed Energy Weapons Subsystem into a High Performance Aircraft System. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; p. 490. [Google Scholar]
- Wolff, M. INVENT Tip to Tail Energy/Engine/Power/Thermal Modeling, Simulation, & Analysis (MS&A). In Proceedings of the 5th Annual Research Consortium for Multidisciplinary System Design Workshop, Boston, MA, USA, 15–16 July 2010. [Google Scholar]
- Falck, R.D.; Chin, J.; Schnulo, S.L.; Burt, J.M.; Gray, J.S. Trajectory Optimization of Electric Aircraft Subject to Subsystem Thermal Constraints. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017. [Google Scholar] [CrossRef]
- Hendricks, E.S.; Falck, R.D.; Gray, J.S. Simultaneous Propulsion System and Trajectory Optimization. In Proceedings of the 18th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Denver, CO, USA, 5–9 June 2017; p. AIAA-2017-4435. [Google Scholar] [CrossRef]
- Schnulo, S.L.; Jeff Chin, R.D.F.; Gray, J.S.; Papathakis, K.V.; Clarke, S.C.; Reid, N.; Borer, N.K. Development of a Multi-Segment Mission Planning Tool for SCEPTOR X-57. In Proceedings of the 2018 Multidisciplinary Analysis and Optimization Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Falck, R.D.; Gray, J.S. Optimal control within the context of multidisciplinary design, analysis, and optimization. In Proceedings of the AIAA Scitech 2019 Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- Hendricks, E.S.; Falck, R.D.; Gray, J.S.; Aretskin-Hariton, E.D.; Ingraham, D.J.; CHapman, J.W.; Schnulo, S.L.; Chin, J.C.; Jasa, J.P.; Bergeson, J.D. Multidisciplinary Optimization of a Turboelectric Tiltwing Urban Air Mobility Aircraft. In Proceedings of the AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Dallas, TX, USA, 17–21 June 2019. [Google Scholar]
- Liem, R.P.; Mader, C.A.; Lee, E.; Martins, J.R.R.A. Aerostructural design optimization of a 100-passenger regional jet with surrogate-based mission analysis. In Proceedings of the 2013 Aviation Technology, Integration, and Operations Conference, Los Angeles, CA, USA, 12–14 August 2013. [Google Scholar] [CrossRef]
- Kao, J.Y.; Hwang, J.T.; Martins, J.R.R.A.; Gray, J.S.; Moore, K.T. A Modular Adjoint Approach to Aircraft Mission Analysis and Optimization. In Proceedings of the AIAA Science and Technology Forum and Exposition (SciTech), Kissimmee, FL, USA, 5–9 January 2015; p. AIAA 2015-0136. [Google Scholar]
- Kao, J.Y.; Hwang, J.T.; Martins, J.R.R.A. A Modular Approach for Mission Analysis and Optimization. In Proceedings of the 56th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar]
- Liem, R.P. Multimission Fuel-Burn Minimization in Aircraft Design: A Surrogate-Modeling Approach. Ph.D. Thesis, University of Toronto, Toronto, ON, Canada, 2015. [Google Scholar]
- Hwang, J.T.; Jasa, J.; Martins, J.R.R.A. High-fidelity design-allocation optimization of a commercial aircraft maximizing airline profit. J. Aircr. 2019, 56, 1165–1178. [Google Scholar] [CrossRef]
- Liem, R.P.; Mader, C.A.; Martins, J.R.R.A. Surrogate Models and Mixtures of Experts in Aerodynamic Performance Prediction for Aircraft Mission Analysis. Aerosp. Sci. Technol. 2015, 43, 126–151. [Google Scholar] [CrossRef]
- Liem, R.P.; Kenway, G.K.W.; Martins, J.R.R.A. Multimission Aircraft Fuel Burn Minimization via Multipoint Aerostructural Optimization. AIAA J. 2015, 53, 104–122. [Google Scholar] [CrossRef]
- Brelje, B.J.; Martins, J.R.R.A. Development of a Conceptual Design Model for Aircraft Electric Propulsion with Efficient Gradients. In Proceedings of the AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar] [CrossRef]
- Brelje, B.J.; Jasa, J.P.; Martins, J.R.R.A.; Gray, J.S. Development of a Conceptual-Level Thermal Management System Design Capability in OpenConcept. In NATO Research Symposium on Hybrid/Electric Aero-Propulsion Systems for Military Applications; AVT-RSY-323; NATO: Brussels, Belgium, 2019. [Google Scholar] [CrossRef]
- Chauhan, S.S.; Martins, J.R.R.A. Tilt-wing eVTOL takeoff trajectory optimization. J. Aircr. 2020, 57, 93–112. [Google Scholar] [CrossRef]
- Jasa, J.P.; Hwang, J.T.; Martins, J.R.R.A. Design and Trajectory Optimization of a Morphing Wing Aircraft. In Proceedings of the 2018 AIAA/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Kissimmee, FL, USA, 8–12 January 2018. [Google Scholar] [CrossRef]
- Jasa, J.P.; Mader, C.A.; Martins, J.R.R.A. Trajectory Optimization of a Supersonic Air Vehicle with Thermal Fuel Management System. In Proceedings of the AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Atlanta, GA, USA, 25–29 June 2018. [Google Scholar] [CrossRef]
- Marta, A.C.; Mader, C.A.; Martins, J.R.R.A.; van der Weide, E.; Alonso, J.J. A methodology for the development of discrete adjoint solvers using automatic differentiation tools. Int. J. Comput. Fluid Dyn. 2007, 21, 307–327. [Google Scholar] [CrossRef]
- Mader, C.A.; Martins, J.R.R.A.; Alonso, J.J.; van der Weide, E. ADjoint: An Approach for the Rapid Development of Discrete Adjoint Solvers. AIAA J. 2008, 46, 863–873. [Google Scholar] [CrossRef]
- Kenway, G.K.W.; Mader, C.A.; He, P.; Martins, J.R.R.A. Effective Adjoint Approaches for Computational Fluid Dynamics. Prog. Aerosp. Sci. 2019, 110, 100542. [Google Scholar] [CrossRef]
- Kenway, G.K.W.; Martins, J.R.R.A. Multipoint High-Fidelity Aerostructural Optimization of a Transport Aircraft Configuration. J. Aircr. 2014, 51, 144–160. [Google Scholar] [CrossRef]
- Martins, J.R.R.A.; Hwang, J.T. Review and Unification of Methods for Computing Derivatives of Multidisciplinary Computational Models. AIAA J. 2013, 51, 2582–2599. [Google Scholar] [CrossRef]
- Martins, J.R.R.A.; Lambe, A.B. Multidisciplinary Design Optimization: A Survey of Architectures. AIAA J. 2013, 51, 2049–2075. [Google Scholar] [CrossRef]
- Hwang, J.T.; Martins, J.R.R.A. A computational architecture for coupling heterogeneous numerical models and computing coupled derivatives. ACM Trans. Math. Softw. 2018, 44, 37. [Google Scholar] [CrossRef]
- Allison, D.; Morris, C.; Schetz, J.; Kapania, R.; Sultan, C.; Deaton, J.; Grandhi, R. A multidisciplinary design optimization framework for design studies of an efficient supersonic air vehicle. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012; p. 5492. [Google Scholar] [CrossRef]
- Burton, S.; Alyanak, E.; Kolonay, R. Efficient supersonic air vehicle analysis and optimization implementation using SORCER. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012; p. 5520. [Google Scholar] [CrossRef]
- Alyanak, E.; Kolonay, R. Efficient supersonic air vehicle structural modeling for conceptual design. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012; p. 5519. [Google Scholar] [CrossRef]
- Davies, C.; Stelmack, M.; Zink, P.S.; De La Garza, A.; Flick, P. High fidelity MDO process development and application to fighter strike conceptual design. In Proceedings of the 12th AIAA Aviation Technology, Integration, and Operations (ATIO) Conference and 14th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Indianapolis, IN, USA, 17–19 September 2012; p. 5490. [Google Scholar] [CrossRef]
- Mader, C.A.; Kenway, G.K.W.; Yildirim, A.; Martins, J.R.R.A. ADflow—An open-source computational fluid dynamics solver for aerodynamic and multidisciplinary optimization. J. Aerosp. Inf. Syst. 2020. [Google Scholar] [CrossRef]
- Secco, N.R.; Jasa, J.P.; Kenway, G.K.W.; Martins, J.R.R.A. Component-based Geometry Manipulation for Aerodynamic Shape Optimization with Overset Meshes. AIAA J. 2018, 56, 3667–3679. [Google Scholar] [CrossRef]
- Yildirim, A.; Kenway, G.K.W.; Mader, C.A.; Martins, J.R.R.A. A Jacobian-free approximate Newton–Krylov startup strategy for RANS simulations. J. Comput. Phys. 2019, 397, 108741. [Google Scholar] [CrossRef]
- Bouhlel, M.A.; Hwang, J.T.; Bartoli, N.; Lafage, R.; Morlier, J.; Martins, J.R.R.A. A Python surrogate modeling framework with derivatives. Adv. Eng. Softw. 2019, 135, 102662. [Google Scholar] [CrossRef]
- Hwang, J.T.; Martins, J.R.R.A. A fast-prediction surrogate model for large datasets. Aerosp. Sci. Technol. 2018, 75, 74–87. [Google Scholar] [CrossRef]
- Hendricks, E.S.; Gray, J.S. pyCycle: A Tool for Efficient Optimization of Gas Turbine Engine Cycles. Aerospace 2019, 6, 87. [Google Scholar] [CrossRef]
- Gray, J.S.; Chin, J.; Hearn, T.; Hendricks, E.; Lavelle, T.; Martins, J.R.R.A. Chemical Equilibrium Analysis with Adjoint Derivatives for Propulsion Cycle Analysis. J. Propuls. Power 2017, 33, 1041–1052. [Google Scholar] [CrossRef]
- Bruno, T.J. Thermodynamic, Transport and Chemical Properties of Reference JP-8; Technical Report; National Institute of Standards and Technology: Boulder, CO, USA, 2006. [Google Scholar]
- Lambe, A.B.; Martins, J.R.R.A. Extensions to the Design Structure Matrix for the Description of Multidisciplinary Design, Analysis, and Optimization Processes. Struct. Multidiscip. Optim. 2012, 46, 273–284. [Google Scholar] [CrossRef]
- Gray, J.S.; Hwang, J.T.; Martins, J.R.R.A.; Moore, K.T.; Naylor, B.A. OpenMDAO: An open-source framework for multidisciplinary design, analysis, and optimization. Struct. Multidiscip. Optim. 2019, 59, 1075–1104. [Google Scholar] [CrossRef]
- Jasa, J.P.; Brelje, B.J.; Mader, C.A.; Martins, J.R.R.A. Coupled Design of a Supersonic Engine and Thermal System. In Proceedings of the World Congress of Structural and Multidisciplinary Optimization, Beijing, China, 20–24 May 2019. [Google Scholar]
- Hearn, T.A.; Hendricks, E.; Chin, J.; Gray, J.S. Optimization of Turbine Engine Cycle Analysis with Analytic Derivatives. In Proceedings of the 17th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Washington, DC, USA, 13–17 June 2016. [Google Scholar] [CrossRef]
- Jasa, J.P. Multidisciplinary Design Optimization of an Aircraft Considering Path-Dependent Performance. Ph.D. Thesis, University of Michigan, Ann Arbor, MI, USA, 2019. [Google Scholar]
- Perez, R.E.; Jansen, P.W.; Martins, J.R.R.A. pyOpt: A Python-Based Object-Oriented Framework for Nonlinear Constrained Optimization. Struct. Multidiscip. Optim. 2012, 45, 101–118. [Google Scholar] [CrossRef]
- Gill, P.E.; Murray, W.; Saunders, M.A. SNOPT: An SQP algorithm for large-scale constrained optimization. SIAM J. Optim. 2002, 12, 979–1006. [Google Scholar] [CrossRef]
- Hargraves, C.R.; Paris, S.W. Direct trajectory optimization using nonlinear programming and collocation. J. Guid. Control Dyn. 1987, 10, 338–342. [Google Scholar] [CrossRef]
- Falck, R.D.; Gray, J.S.; Naylor, B. Parallel aircraft trajectory optimization with analytic derivatives. In Proceedings of the 17th AIAA/ISSMO Multidisciplinary Analysis and Optimization Conference, Washington, DC, USA, 13–17 June 2016; p. 3207. [Google Scholar]
- Falck, R.D.; Ingraham, D.; Aretskin-Hariton, E. Multidisciplinary Optimization of Urban-Air-Mobility Class Aircraft Trajectories with Acoustic Constraints. In Proceedings of the 2018 AIAA/IEEE Electric Aircraft Technologies Symposium, Cincinnati, OH, USA, 9–11 July 2018. [Google Scholar] [CrossRef]
- Gray, J.S.; Hearn, T.A.; Naylor, B.A. Using Graph Coloring To Compute Total Derivatives More Efficiently in OpenMDAO. In Proceedings of the AIAA Aviation 2019 Forum, Dallas, TX, USA, 17–21 June 2019; p. 3108. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | Units |
|---|---|---|
| Design altitude | 35,000 | ft |
| Design Mach number | 0.8 | |
| Design | 3200 | ° R |
| Design thrust | 15,000 | lbf |
| Extraction ratio | 1.05 | |
| Fan pressure ratio | 3.3 | |
| HPC pressure ratio | 9.7 |
| Parameter | Value | Units | Comments |
|---|---|---|---|
| Initial tank temperatures | 300 | K | |
| Initial feed tank fuel mass | 1000 | kg | |
| 3. | kg/s | ||
| 1. | kg/s | ||
| Specific heat of component | 921 | J/kg/K | aluminum |
| Specific heat of fuel | 2010 | J/kg/K | Jet-A |
| Fuel density | 800. | kg/m | Jet-A |
| Fuel thermal conductivity | 0.110 | W/m/K | Jet-A |
| Fuel viscosity | 0.000704 | kg/m/s | Jet-A |
| Component mass | 12 | kg | small avionics package |
| Channel width | 1.0 | mm | |
| Channel height | 20. | mm | |
| Channel length | 0.2 | mm | |
| Case thickness | 2.0 | mm | |
| Fin thickness | 0.102 | mm | |
| Plate thickness | 0.2 | mm | |
| Material thermal conductivity | 190 | W/m/K | aluminum |
| Material density | 2700 | kg/m | aluminum |
| Number of fins long, cold side | 3 | – | |
| Number of channels wide, cold side | 200 | – | |
| Number of hot/cold stacks | 15 | – | |
| Channel height, cold side | 14 | mm | |
| Channel width, cold side | 1.35 | mm | |
| Fin length, cold side | 6 | mm | |
| Specific heat, cold side | 1005 | J/kg/K | air |
| Thermal conductivity, cold side | 0.02596 | W/m/K | air |
| Viscosity, cold side | 0.00001789 | kg/m/s | air |
| Channel height, hot side | 1 | mm | |
| Channel width, hot side | 1 | mm | |
| Fin length, hot side | 6 | mm | |
| Specific heat, hot side | 2010 | J/kg/K | Jet-A |
| Thermal conductivity, hot side | 0.11 | J/kg/K | Jet-A |
| Duct inlet area | 0.0645 | m | |
| Nozzle throat area | 0.0194 | m |
| Category | Name | Quantity | Lower | Upper | Units | |
|---|---|---|---|---|---|---|
| No Thermal Constraints | Thermal Constraints | |||||
| Objective | fuel burn | 1 | 1 | – | – | kg |
| Variables | 12 | 12 | −0.1 | 0.1 | radians/s | |
| 12 | 12 | −5 | 5 | m/s | ||
| 6 | 6 | 0 | 0.05 | |||
| 0 | 18 | 0 | 10 | kg/s | ||
| 0 | 18 | 0 | 10 | kg/s | ||
| mass | 83 | 83 | 15,000 | 30,000 | kg | |
| altitude | 83 | 83 | 0 | 16 | km | |
| range | 83 | 83 | 0 | – | km | |
| velocity | 83 | 83 | 0 | 1000 | m/s | |
| 82 | 82 | −0.5 | 0.5 | radians | ||
| feed mass | 83 | 83 | 10 | – | kg | |
| main mass | 83 | 83 | 10 | – | kg | |
| feed T | 83 | 83 | 100 | 1000 | K | |
| main T | 83 | 83 | 100 | 1000 | K | |
| component T | 83 | 83 | 100 | 1000 | K | |
| m | 83 | 83 | – | – | kg | |
| Total | 944 | 980 | ||||
| Constraints | final altitude | 1 | 1 | 100 | 100 | m |
| final Mach | 1 | 1 | 0. | 0.5 | ||
| Mach cruise path constraints | 36 | 36 | 1.4 | 1.4 | ||
| altitude cruise path constraints | 36 | 36 | 13 | 13 | km | |
| path constraints | 84 | 84 | −15 | 15 | degrees | |
| path constraints | 84 | 84 | 2000 | 3200 | degrees R | |
| 24 | 24 | 0 | – | |||
| path constraints | 0 | 84 | 0.01 | – | kg/s | |
| feed mass path constraints | 0 | 84 | 500 | – | kg | |
| path constraints | 0 | 84 | 0 | – | kg/s | |
| path constraints | 0 | 84 | – | 100 | degrees C | |
| Component T path constraints | 0 | 84 | – | 80 | degrees C | |
| main T path constraints | 0 | 84 | 300 | 300 | K | |
| range defects | 70 | 70 | 0 | 0 | km | |
| altitude defects | 70 | 70 | 0 | 0 | km | |
| velocity defects | 70 | 70 | 0 | 0 | m/s | |
| defects | 70 | 70 | 0 | 0 | radians | |
| mass defects | 70 | 70 | 0 | 0 | kg | |
| feed mass defects | 70 | 70 | 0 | 0 | kg | |
| feed T defects | 70 | 70 | 0 | 0 | K | |
| main T defects | 70 | 70 | 0 | 0 | K | |
| component T defects | 70 | 70 | 0 | 0 | K | |
| m pumped defects | 70 | 70 | 0 | 0 | kg | |
| main mass defects | 70 | 70 | 0 | 0 | kg | |
| phase continuity constraints | 121 | 121 | 0 | 0 | ||
| linkage constraints | 24 | 24 | 0 | 0 | ||
| Total | 1181 | 1685 | ||||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jasa, J.P.; Brelje, B.J.; Gray, J.S.; Mader, C.A.; Martins, J.R.R.A. Large-Scale Path-Dependent Optimization of Supersonic Aircraft. Aerospace 2020, 7, 152. https://doi.org/10.3390/aerospace7100152
Jasa JP, Brelje BJ, Gray JS, Mader CA, Martins JRRA. Large-Scale Path-Dependent Optimization of Supersonic Aircraft. Aerospace. 2020; 7(10):152. https://doi.org/10.3390/aerospace7100152
Chicago/Turabian StyleJasa, John P., Benjamin J. Brelje, Justin S. Gray, Charles A. Mader, and Joaquim R. R. A. Martins. 2020. "Large-Scale Path-Dependent Optimization of Supersonic Aircraft" Aerospace 7, no. 10: 152. https://doi.org/10.3390/aerospace7100152
APA StyleJasa, J. P., Brelje, B. J., Gray, J. S., Mader, C. A., & Martins, J. R. R. A. (2020). Large-Scale Path-Dependent Optimization of Supersonic Aircraft. Aerospace, 7(10), 152. https://doi.org/10.3390/aerospace7100152