1. Introduction
The search for efficient, flexible, and robust orbit maintenance strategies has gained increased traction with the success of the Artemis 1 mission and the prospects for future crewed and robotic lunar exploration. Ever since the discovery of quasi-periodic orbits in the Sun–Earth–Moon system by Robert Farquhar and Ahmed Kamel, research exploring their use for future mission architectures has continued to be a growing interest in Lagrange Point Orbits (LPOs) [
1]. For instance, several periodic orbits have been tested as candidates for the Lunar Gateway, and eventually, NASA earmarked an orbit from the Southern Near Rectilinear Halo family around the Earth–Moon
with a 9:2 synodic resonance, as the orbit for establishing a sustained human presence in the cis-lunar space [
2,
3]. Additionally, to aid preliminary mission design and analysis, several periodic orbit initial conditions associated with the Circular Restricted Three-Body Problem (CR3BP) have been computed and stored for several three-body systems of interest [
4]. However, metadata from the aforementioned database are associated with periodicity established in simplified dynamics which do not account for realistic multi-body perturbation effects, thereby limiting applicability for realistic mission design.
Previous studies have demonstrated that rather expectantly, LPOs in the CR3BP lose their periodicity when realistic perturbations are embedded into the dynamical system [
1,
5,
6,
7,
8,
9,
10,
11,
12,
13,
14,
15,
16,
17,
18,
19,
20,
21,
22,
23,
24,
25,
26]. Since unmodeled perturbations significantly affect nominal spacecraft trajectory, it has been demonstrated that autonomous trajectory re-planning, guidance, and station-keeping analyses are of utmost importance for the success of these missions [
17,
18,
19,
25,
27,
28,
29,
30]. Several methods have been used so far by researchers ranging from location-based Target Point Approach (TPA), shape-similar trajectories, to finite-time Lyapunov exponents (FTLEs) in the form of the Cauchy Green Tensor (CGT) [
17,
18,
25,
27,
28]. Studies performed on the effects of the Sun’s gravity on the spacecraft as an additional perturbing force, through the Bi-Circular Restricted Four-Body Problem (BCR4BP) in the Sun–Earth–Moon system which presented significant positional deviation from a perfectly periodic halo orbit [
6,
7,
8,
9,
10]. For Europa, due to the proximity to both Io and Ganymede, the Concentric Circular Restricted Four-Body Problem (CCR4BP) was a better approximation as all three moons are in resonance with each other [
19,
20]. Another paper that focuses on the Sun–Earth–Moon system also includes the effect of albedo on the celestial bodies themselves as an additional parameter [
10]. Non-uniform gravitational fields have also been studied in the context of perturbations to the CR3BP whereas the primary and secondary were considered oblate spheroids with no obliquity [
10,
11,
12,
13,
14,
15,
16,
17,
18]. Many of these studies focus on the Europa and Enceladus as the proximity to both the planet and moon affect the perceived gravity as a function of latitude [
13,
14,
15,
16]. These analyses provide important insights for potential future long-term scientific missions to observe the geological activity and discover life on these icy moons.
Many studies have also focused on characterizing LPOs and studying station keeping (SK) in a dynamical system of higher complexity. For instance, the restricted Ephemeris model has been used as a preliminary test for SK of halo orbits which has the effect of solar radiation pressure (SRP) embedded in the dynamical system [
17,
18]. Other studies have either focused on different three-body systems or solely analyzed the effects of non-circular orbits on the autonomous CR3BP dynamics. These studies determined the effects of eccentricity by analyzing the dynamical behavior in the Elliptic Restricted Three-Body Problem (ER3BP) [
21,
22,
23,
24,
25,
26]. It has been proved mathematically that the system dynamics become further chaotic and more unstable for any spacecraft in the ER3BP when compared to the original CR3BP [
21]. The results are indicative of the fact that consideration of eccentricity leading to non-autonomous motion can have profound effects on the legacy dynamical structures from the more benign circular restricted case. Periodicity for halo orbit counterparts has been achieved via numerical continuation and shows significant dissimilarity from corresponding motions in the CR3BP family [
22,
23,
24,
25]. Therefore, the need to analyze systems of intermediate fidelity using advanced numerical methods to understand long-term dynamical behavior and motion structures has been established. There have been SK methods used within the ER3BP using multiple impulses per orbit-rev and a monodromy matrix analog [
26]. The aforementioned station-keeping papers focused on keeping the CR3BP orbit as the nominal reference orbit without carrying out a robust and holistic search for novel periodic structures catering to an incremental addition of fidelity to the original autonomous dynamical system.
A significant operational challenge in the context of long-duration “orbiter-type” space missions is determining the appropriate cadence of the Orbit Determination (OD), SK, and Science Objective (SO) cycle. For instance, a spacecraft, initially placed in a Low Lunar Orbit (LLO) to perform high-resolution imaging of the lunar terrain requires constant SK maneuvers to maintain the orbit in the presence of anomalous lunar gravity [
31]. On the other hand, SK maneuver quantification requires accurate navigation input from OD. Therefore, a significant fraction of a revolution is attributed to OD and SK, limiting imaging science opportunities. This hampers the overall efficiency of the mission and novel orbit maintenance strategies that can provide an efficient cadence such that the final goal is achieved, are of utmost importance.
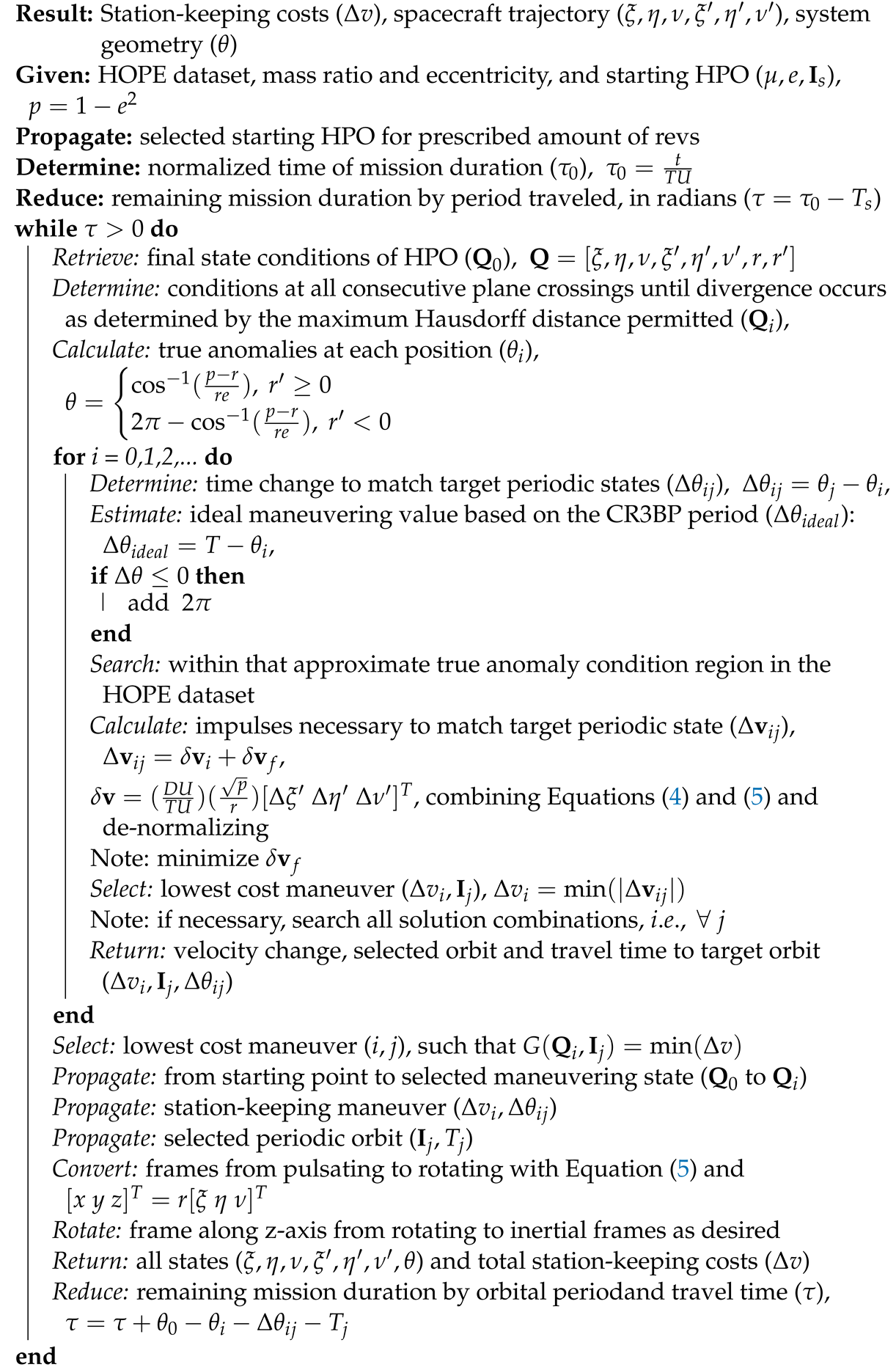
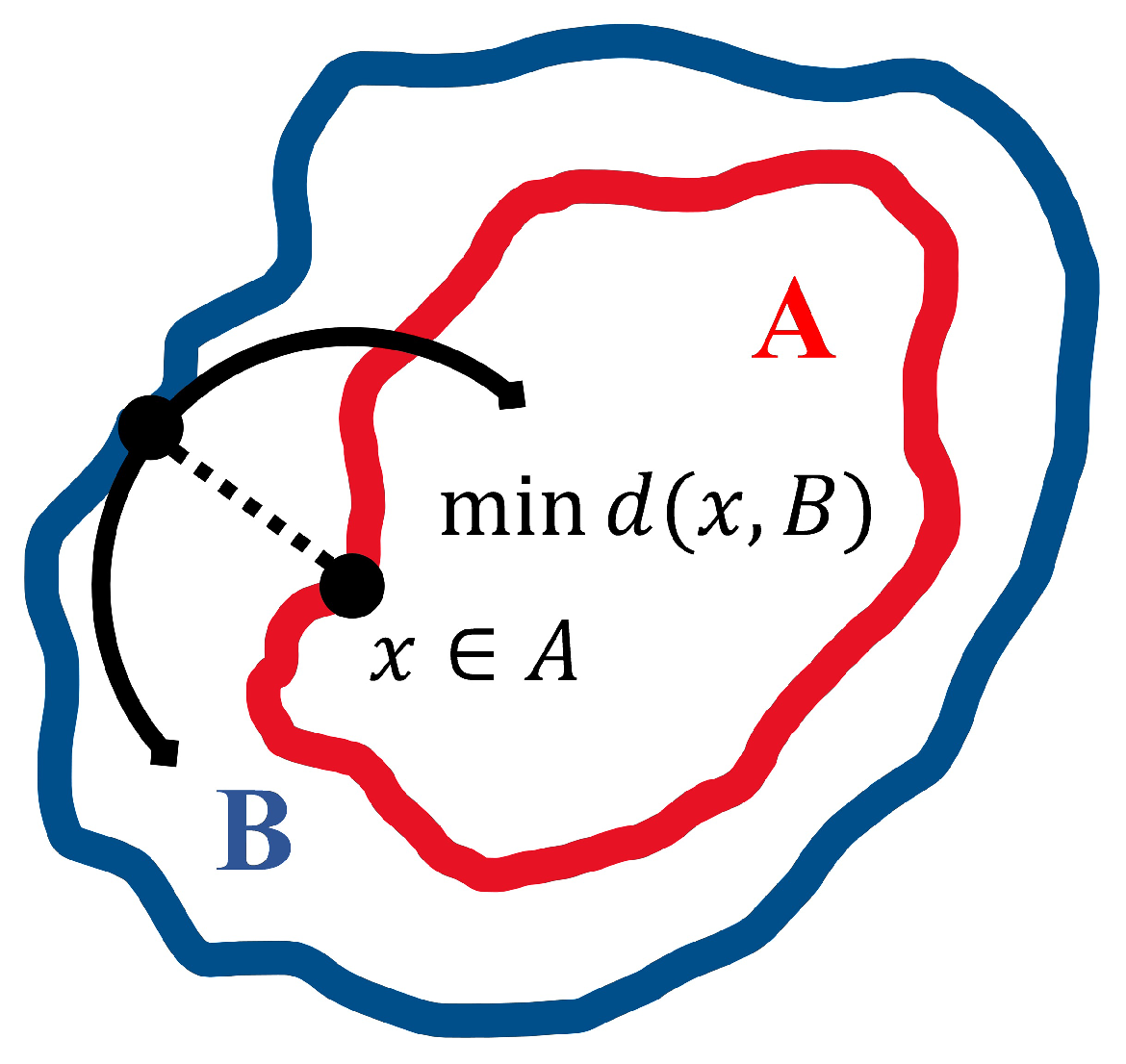
In this paper, a novel, elegant, and robust methodology is proposed to generate orbits from the well-documented CR3BP periodic orbits in the presence of the ER3BP dynamical system. These orbits are periodic over the entire state space and bear a resemblance to their CR3BP counterparts in shape and period as derived from continuation. They are therefore termed “homeomorphic” to their CR3BP counterparts and the orbit revs termed as Homoemorphic Periodic Orbits (HPOs) for the rest of the paper. Enforcing shape similarity preserves the attractiveness of the discovered orbit rev (like eclipse conditions, periapse altitude, etc.) while equipping mission designers with more realistic dynamical behavior. The underlying algorithm employs an arc-length homotopy approach to achieve convergence using the CR3BP periodic conditions as the initial guess. The results demonstrate the robustness and generality of the algorithm as it could apply to different periodic orbit families in several systems and geometrical configurations.
Finally, an optimal orbit maintenance algorithm utilizing a single-impulse per-rev architecture is employed to quantify the fuel cost that leverages the pre-computed and tabulated periodic revs. In the optimization scheme, a “target condition” database of HPOs is built for the ER3BP dynamics based on the desired amount of revs by matching the position and velocity vectors although not requiring the initial and final true anomalies to match. The associated periodic conditions are saved as metadata with the initial true anomaly as a classifying parameter. Progression along the proposed SK architecture is achieved by drawing from the generated dataset to identify the target future state. A single-shooting algorithm is then used to solve for the correction maneuvers required to achieve the final state associated with the next HPO rev. Annual fuel costs are estimated for different “orbits of interest” in the cis-lunar and the Sun–Earth systems. Additional filtering of the database has been explored by using the shape-similarity metric to reduce the target state search space in the search for an optimal SK architecture. The rest of the paper is organized as follows:
Section 1 and
Section 2 deal with theoretical preliminaries which include succinct descriptions of the ER3BP, numerical continuation techniques, and shape similarity metrics.
Section 3 formulates the problem of HPO searches and discusses the SK strategy in detail.
Section 4 provides results achieved by implementing the algorithms in
Section 3 in the context of selected “orbits of interests”.
Section 5 concludes the paper and describes avenues for building on the current work in the future.
4. Results
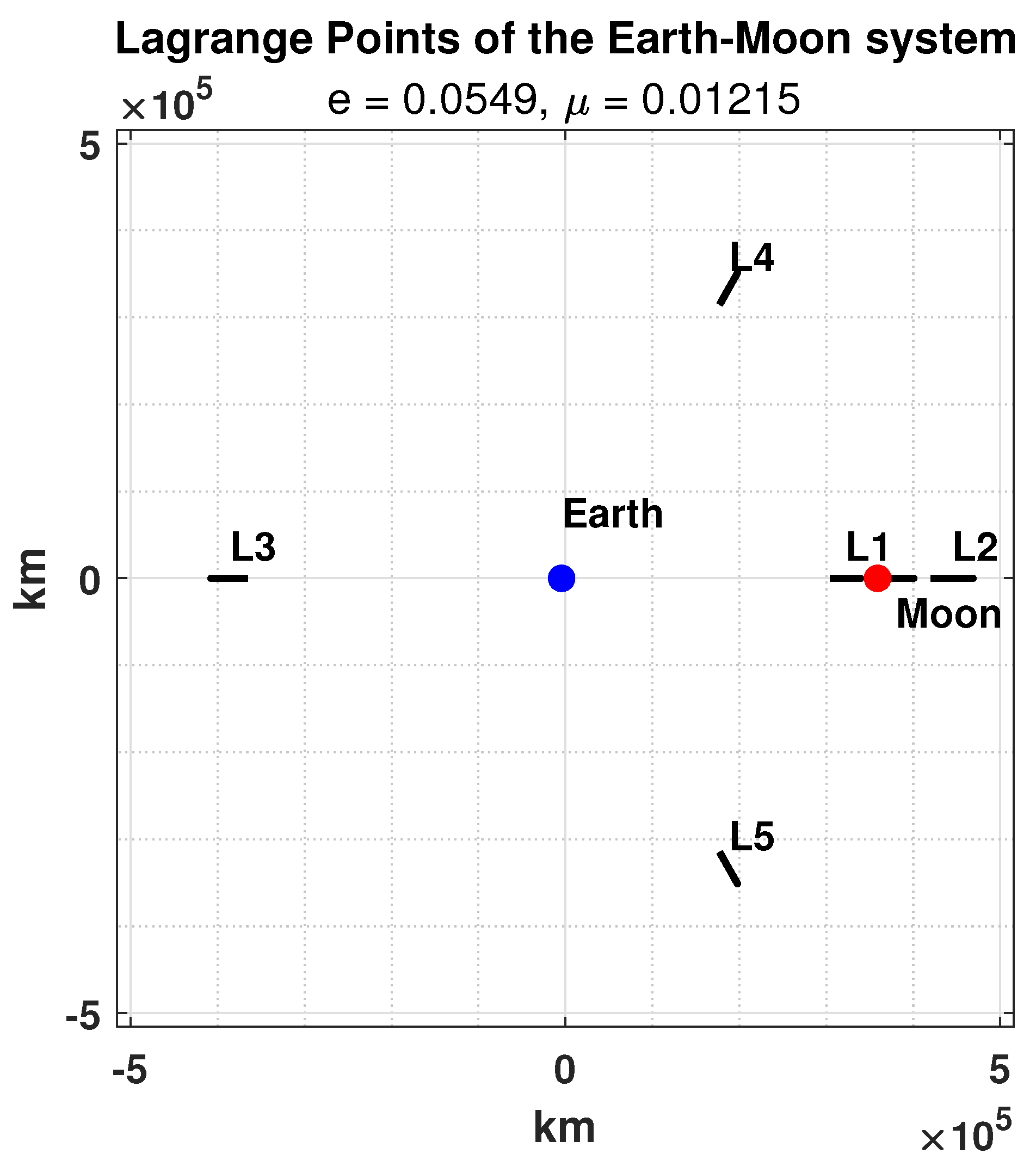
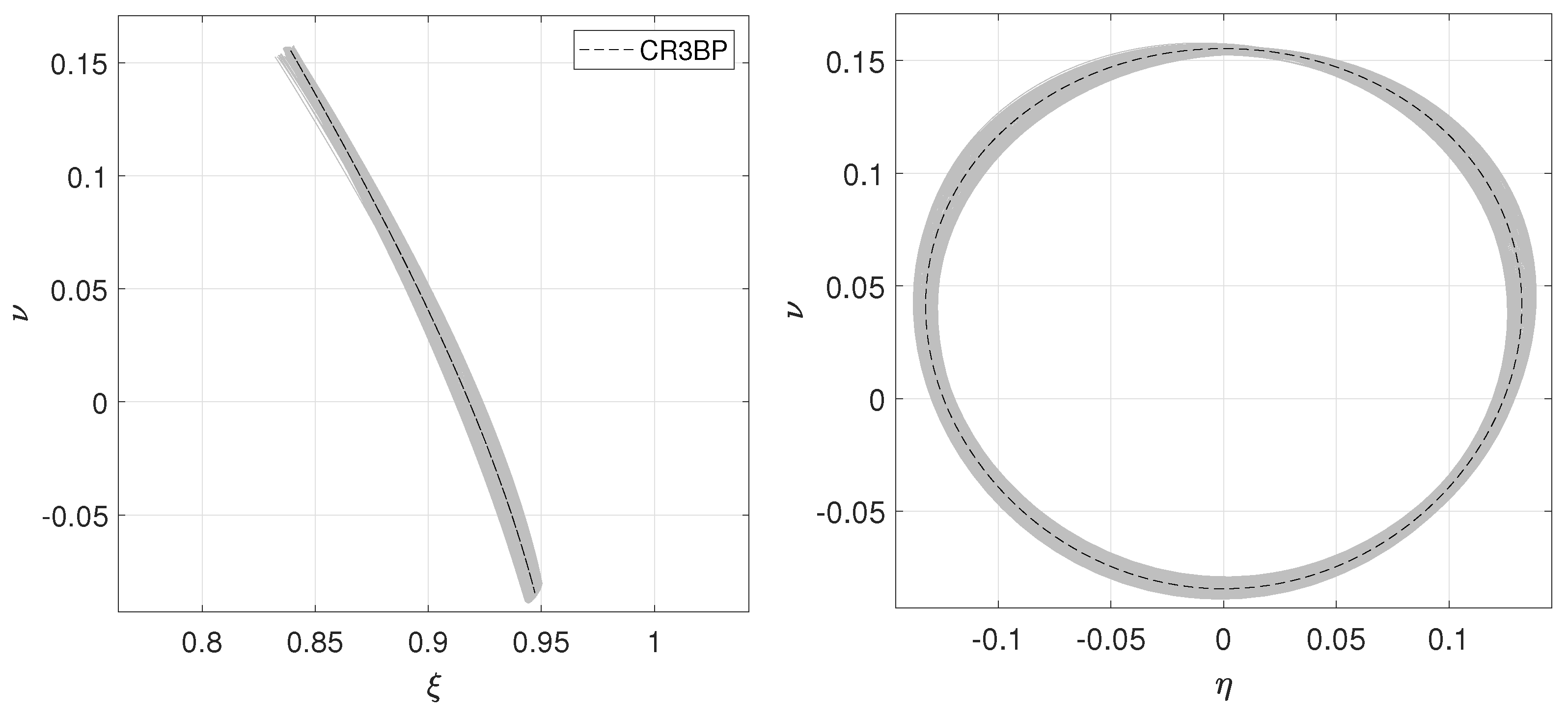
Given the success of the Artemis I mission and the planned Lunar Gateway, studying the insertion and maintenance of periodic orbit analogs in the Earth–Moon system is crucial for the advanced mission design of future missions. Utilizing the dataset as seen in
Figure 9 and
Figure 10, the necessary station-keeping costs for 1 year of operations are shown. This process was repeated at intervals of
for various initial system geometries.
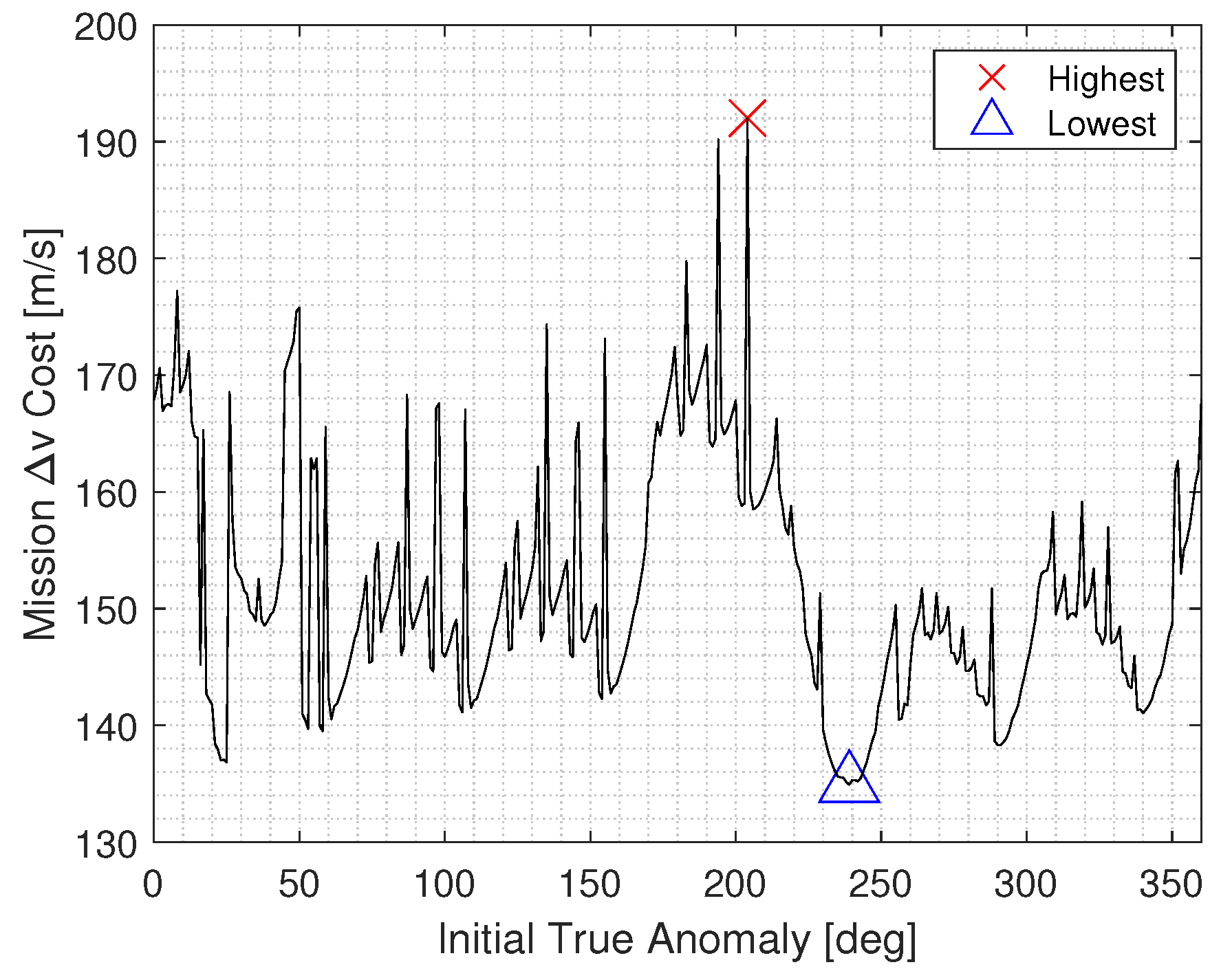
As evident from
Figure 12, although initial geometry can significantly alter the single-impulse station-keeping costs to maintain the orbit, the costs are still bounded across the entire domain for the
= 93,400 km CR3BP parent halo orbit. To elaborate further,
Figure 13 depicts the accumulated per-rev costs to maintain 32 revs over a period of a year for the most and least optimal scenarios.
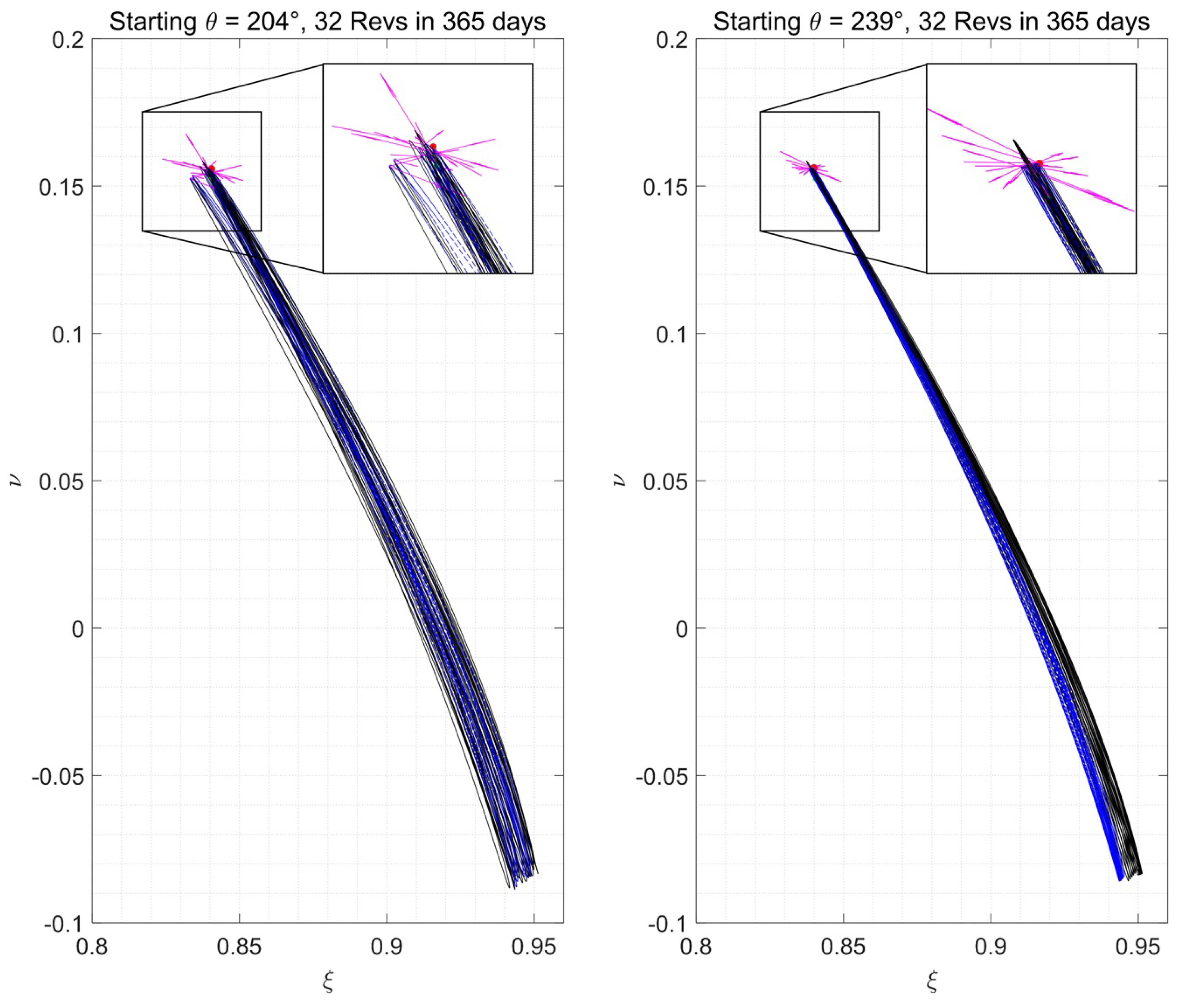
Each impulse performed is represented as a discontinuous jump from one rev to another in
Figure 13. For the trajectory with an initial true anomaly of
, the total annual station-keeping cost with the single-impulse per-rev architecture is 192 m/s or about 6 m/s per-rev on average. Some
solutions are used, but not often which then makes the particular maneuvers quite expensive. Furthermore, the cost per-rev is consistent throughout the path taken. Nevertheless, other initial states lead to improved results, as seen from the initial true anomaly of
which has better stability. This characteristic can be seen from the repetitive maneuvers that appear to occur, especially those of
solutions which decrease the costs significantly. The total annual station-keeping cost comes out as 135 m/s or about 4.2 m/s per-rev on average. This leads to a distribution of maneuvering costs since the SK costs vary from 1.71 m/s to 12.4 m/s per-rev. It should be noted that the costs would further decrease if more frequent maneuvers are implemented in far more unstable local regions, but this paper only characterizes strictly one impulse per-rev scenarios.
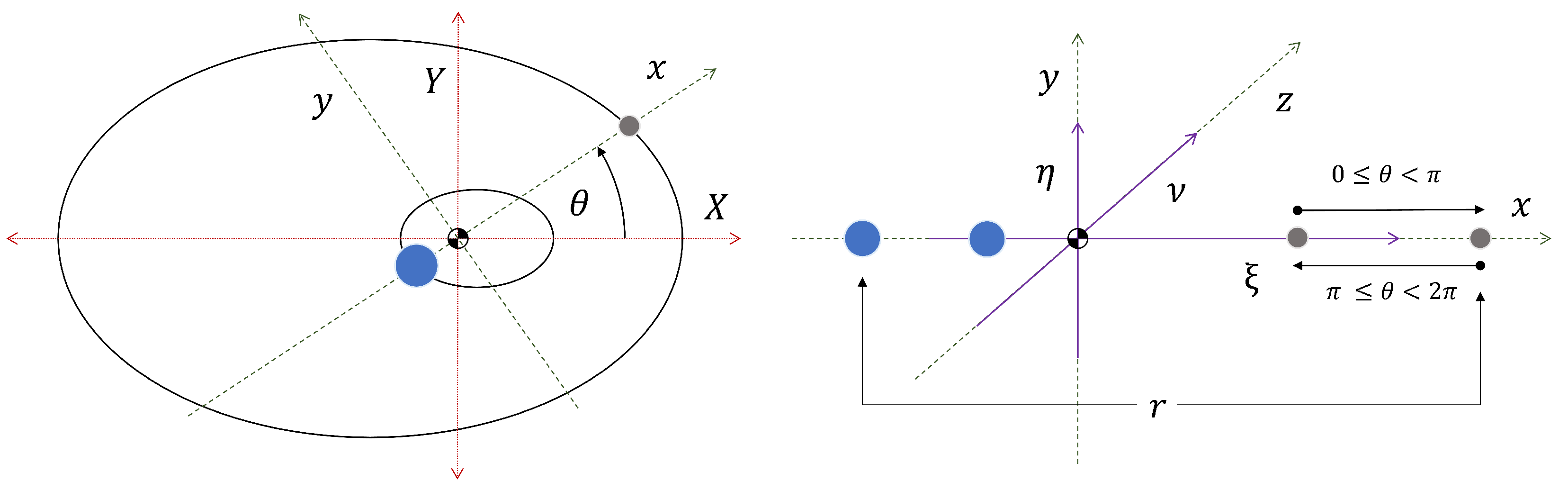
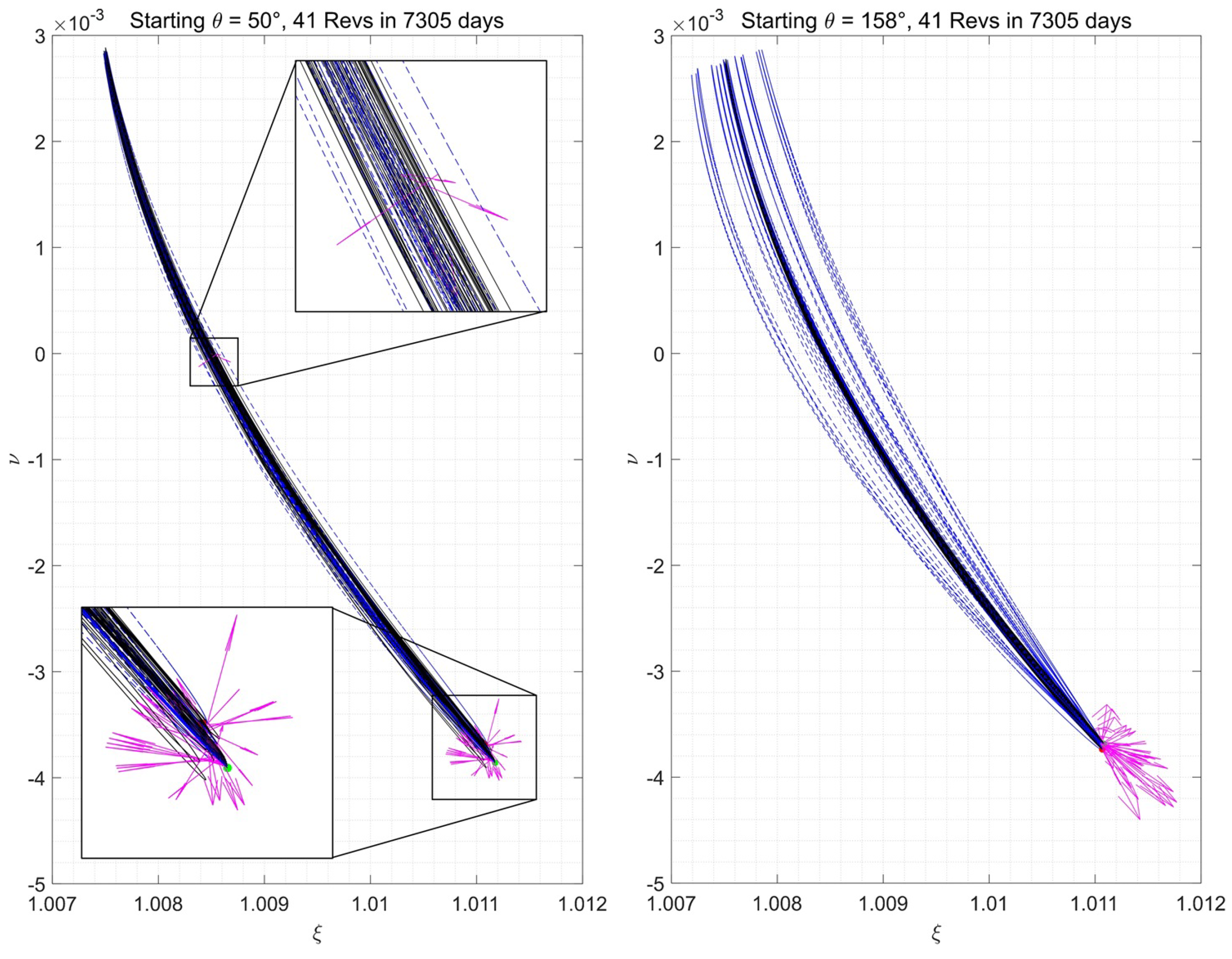
For a more intuitive representation, the paths were mapped onto the pulsating frame shown in
Figure 14 where the red dot denotes the starting position state and the green dot denotes the final position state. Due to the orbital period being out of resonance with the lunar orbit, the spacecraft must continuously perform corrective maneuvers to maintain a shape-similar trajectory for an extended period of time. The magenta vectors show the impulses necessary to maintain the orbit which have a strong dependence on the starting conditions. The solid black lines indicate the HPO revs, whereas the dashed blue lines represent the intermediate trajectories denoting the post-maneuver path that transfers the spacecraft to the next selected rev. It is immediately evident based on a graphical analysis of the trajectories in
Figure 14, that the hypothesis proposing a direct correlation between shape similarity of the orbital revs holds true. Unsurprisingly, with the single-impulse per-rev architecture, the “local” optimal location was at the apoapsis of the current rev. This leads to lower station-keeping costs which are seen in
Figure 12 and
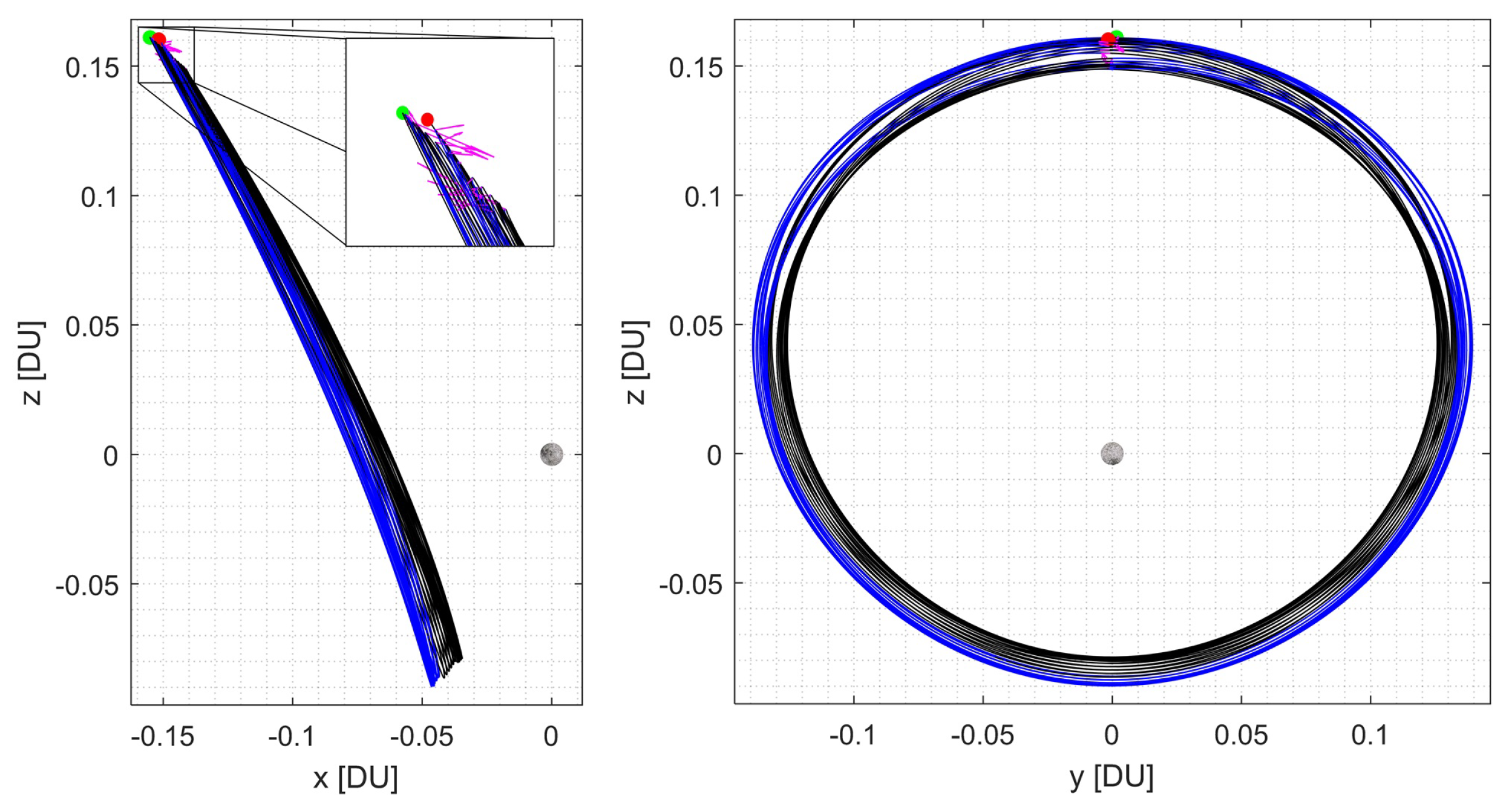
Figure 13. Considering that this only shows the perspective from the pulsating frame with respect to the Lagrange points, the true path for the lowest cost trajectory was also plotted as observed in the Moon-Centered Rotating Frame.
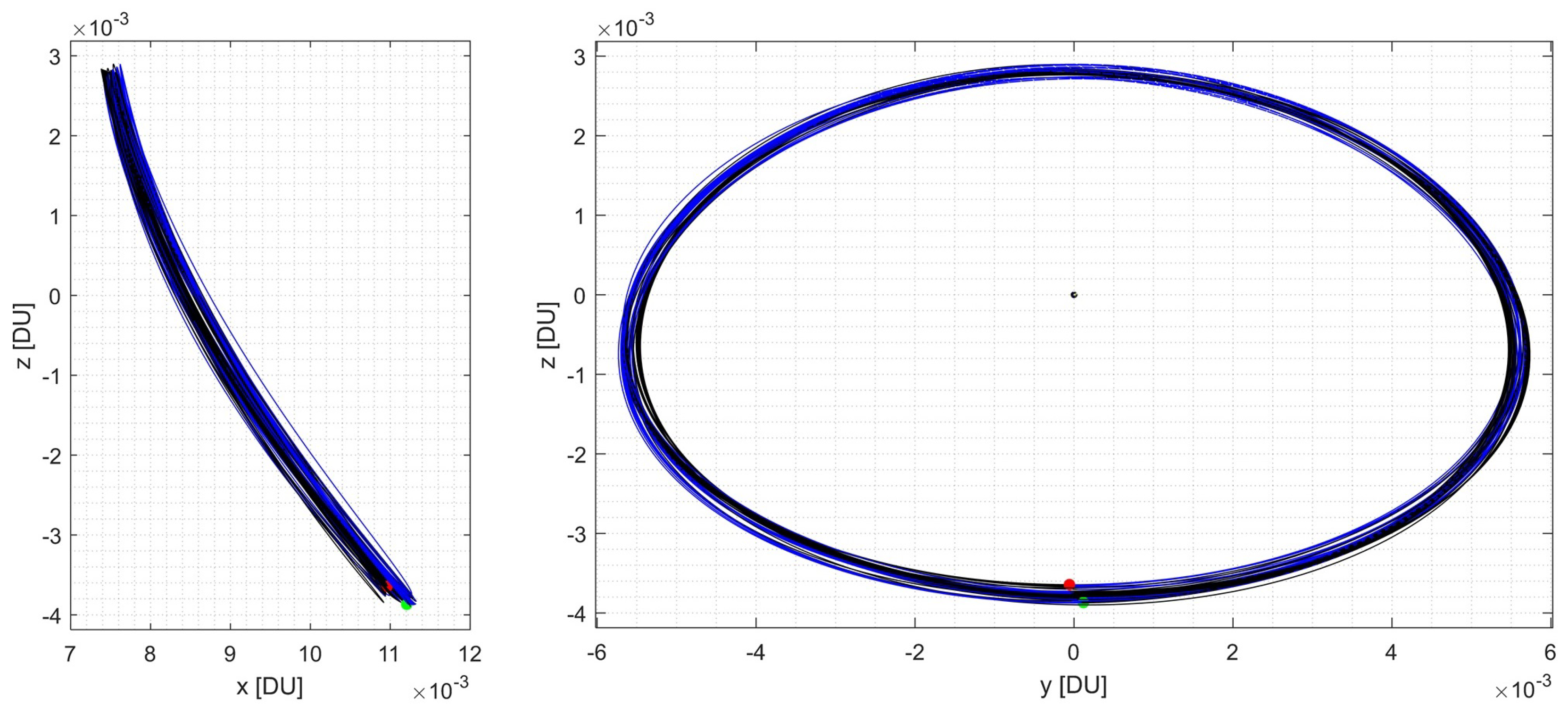
When viewing the trajectory from the Moon-Centered Rotating Frame in
Figure 15, the distortion produced by the eccentricity can be further observed. The cumulative trajectory as observed in this frame forms a shape akin to a truncated cone as the pulsating frame expands and contracts. This leads to a variation in the Z-amplitude (
) of 0.0298 DU or 11,600 km due to the eccentricity. This variation is consistent throughout all the successive HPO revs and for every configuration due to an absence of resonance with the Moon’s motion. Typically, the periodic orbit revs were followed during the closest approaches of the Earth and Moon, but the intermediate transfer trajectories occurred as the overall system slowed down at a much farther distance, thus reducing the costs required to transfer arcs. At its closest approach, the Moon’s gravity is dominant, and therefore impulses are necessary to prevent ejection towards the Moon. Likewise, when the spacecraft is at its furthest, the Earth’s gravity is dominant; therefore, impulses are required to prevent the spacecraft from ejecting towards the Earth. The station-keeping trajectory tends to maneuver in a direction away from the dominant force to minimize opposing effects. Thus, optimal domains could be analyzed and this insight can be further refined to design a multi-impulse per-rev maintenance architecture.
A worthwhile consideration previously noted is the scalar change in lunar eccentricity. Although not incorporated in this work, this effect can be easily simulated by changing the primary-secondary distance in Equation (1) and initial conditions from Equation (
3a) and (3b) to accurately model the effect of the non-linear eccentricity as a function of the true anomaly. Given that the periodicity of these orbits can be sensitive to minor changes, this would drastically alter the dataset and subsequent station-keeping costs.
Since the launch of the James Webb Space Telescope (JWST) on the 25th of December 2021, the telescope has provided a large amount of data and scientific information [
37]. Due to the infrared nature of the telescope, it had to be stationed at a location that was relatively near the Earth but constantly facing away from the Sun. The nominal
Southern Halo Orbit with
= 984,000 km and
C = 3.000747 was selected as an ideal location to perform observations, studying the selected orbit and quantifying the maintenance costs over a 20-year lifespan would help with
budgeting during preliminary mission design. A lack of accurate orbit parameters means that a parent orbit based on the graphical representation was selected as an approximate analog orbit which has the initial states shown in
Table 2. In this case
, 1 DU = 149,597,871 km, and 1 TU = 5,022,635 s for the Sun–Earth system [
4]. Furthermore, the step and function tolerances for
fsolve were altered to
for better convergence.
The nominal orbit in the Sun–Earth system has a period of 180 days, just under 6 months. Since the eccentricity is not constant, the value used was based on an averaged estimate near 2030 (e.g.,
[
39]). The filtered database of shape-similar revs was utilized to perform station-keeping quantification for several initial geometries and
Figure 16 provides a depiction similar to the previous case. The output was observed to show high sensitivity to the starting initial geometry. Even a small offset, close to a single degree, between sequential scenarios translates to drastic changes in the station-keeping costs. In
Figure 17, two trajectories were presented to compare and contrast incurred costs.
For the trajectory with an initial true anomaly of
,
Figure 17 shows that the total annual station-keeping cost comes out to be 363 m/s or about 8.86 m/s per-rev on average. Several
solutions were used, but not very often due to the instability of the system, thus rendering the particular orbit rev maneuvers quite expensive. For the initial and final segments of the path, the single rev orbits are selected rather than the intermediate segment between orbits 10 and 25 where the costs can be as low as 2.16 m/s which more closely resembles costs to the real JWST. The least optimal condition starts at an initial true anomaly of
, requiring large impulses to prevent escape from the system. This is visualized in
Figure 18 within the pulsating frame.
Considering that the orbital period for the nominal JWST orbit has 2:1 resonance with the Earth, most of the station-keeping maneuvers were performed under similar geometric conditions. Since the orbital period does not exactly match the resonance value, the spacecraft must continuously correct at the precessing true anomaly values. The magenta vector that indicates the impulses are much more significant for the latter case which is also reflected in the accumulated costs over the 20-year mission lifetime. For the more optimal case, a magnified sub-image is provided to show that most maneuvers tended to be perpendicular to the trajectory path. The shape similarity of the path once again shows that the proximity of the trajectory to the parent orbit lowered station-keeping costs. There is enough stability for certain HPOs that the optimal impulsive maneuver is shown to be at the x-y plane rather than at apoapse. For a more insightful visual representation, in
Figure 19 the spacecraft path is plotted in the Earth-Centered Rotating Frame.
The trajectory in
Figure 19 better resembles the true path taken by the spacecraft as it traversed the
region. Even though the system’s eccentricity is smaller when compared to the Earth–Moon system, the overall orbit size is significantly larger. A Z-amplitude (
) variation of
DU or 64,640 km was observed due to the eccentric secondary orbit, which is commensurate to the real orbit profile for the JWST mission. The presence of certain resonant orbit revs and initial geometric conditions where convergence was difficult due to instability leads to a complex and almost enigmatic correlation between
and
. Careful analysis could only reveal a weak correlation. It is therefore hypothesized that the stability index of the individual HPO revs is possibly a much more significant factor. In the front view within
Figure 19, the positional deviation from the ideal CR3BP halo orbit is quite noticeable, as the Earth is provided there for scale. Since both the Earth and Sun were on the same side of the orbit, there was no preference as to when the station-keeping maneuvers were necessary. This path also stays completely out of the Earth–Moon system shadows as JWST was designed to be a solar-powered telescope. It is hereby noted that SRP is an important forcing function not considered a part of this work. A more accurate result and SK quantification would also consider this effect but such analysis is amenable to the described methodology.
Since the revs in the EML1 halo discussed earlier were very unstable and sensitive to perturbations, all the course corrections were performed immediately after one period of each rev. On the other hand, for the JWST there was enough stability for certain orbits to sustain multiple
x-y plane crossings, resulting in lower average annual fuel consumption. Although this architecture limits the maximum impulse count to one per-rev, the real telescope performs such a maneuver on a monthly basis [
38]. This is effectively six station-keeping maneuvers per-rev, which is not very far off from the design in this paper. Therefore, the conservative costs of the optimal trajectory using the single-impulse per-rev architecture is expected to be within an order of magnitude of the true values for a 20-year mission lifetime.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}