1. Introduction
Space docking is a core technology for accomplishing various missions in space, such as unmanned sample return from outer planets, space station construction and maintenance, spacecraft on-orbit services and manned moon landing [
1,
2]. The use of the lunar-orbit rendezvous and docking mode in lunar sample return missions can increase the sample return capability and significantly improve mission efficiency. The docking mechanism is the key system for realizing a space docking mission of two spacecraft. Currently, the space docking mechanisms can be classified into two types, passive capture docking mechanism and active capture docking mechanism, according to the mode of capture. Passive capture docking mechanism realizes the deviation correction and initial connection through the initial relative kinetic energy, which will generate a large collision load. As a result, it requires the use of a variety of energy-consuming damping devices to realize energy dissipation and collision load control, resulting in a large mass and volume of the passive capture docking mechanism. Therefore, it is mainly used for manned spacecraft docking and is not able to meet the lightweight and envelope size requirements of unmanned spacecraft [
3,
4,
5,
6]. The active capture docking mechanism can realize reliable low-speed capture and can significantly reduce the contact collision load and the mass and volume of the docking mechanism at the same time. Therefore, the active capture docking mechanism can better meet the requirements of a docking mission for unmanned spacecraft [
7].
Currently, there have been some studies of active capture docking mechanisms [
8]. U.S. Orbit Express is a docking mechanism utilizing a three-finger configuration, which was validated on-orbit in March 2007 [
9,
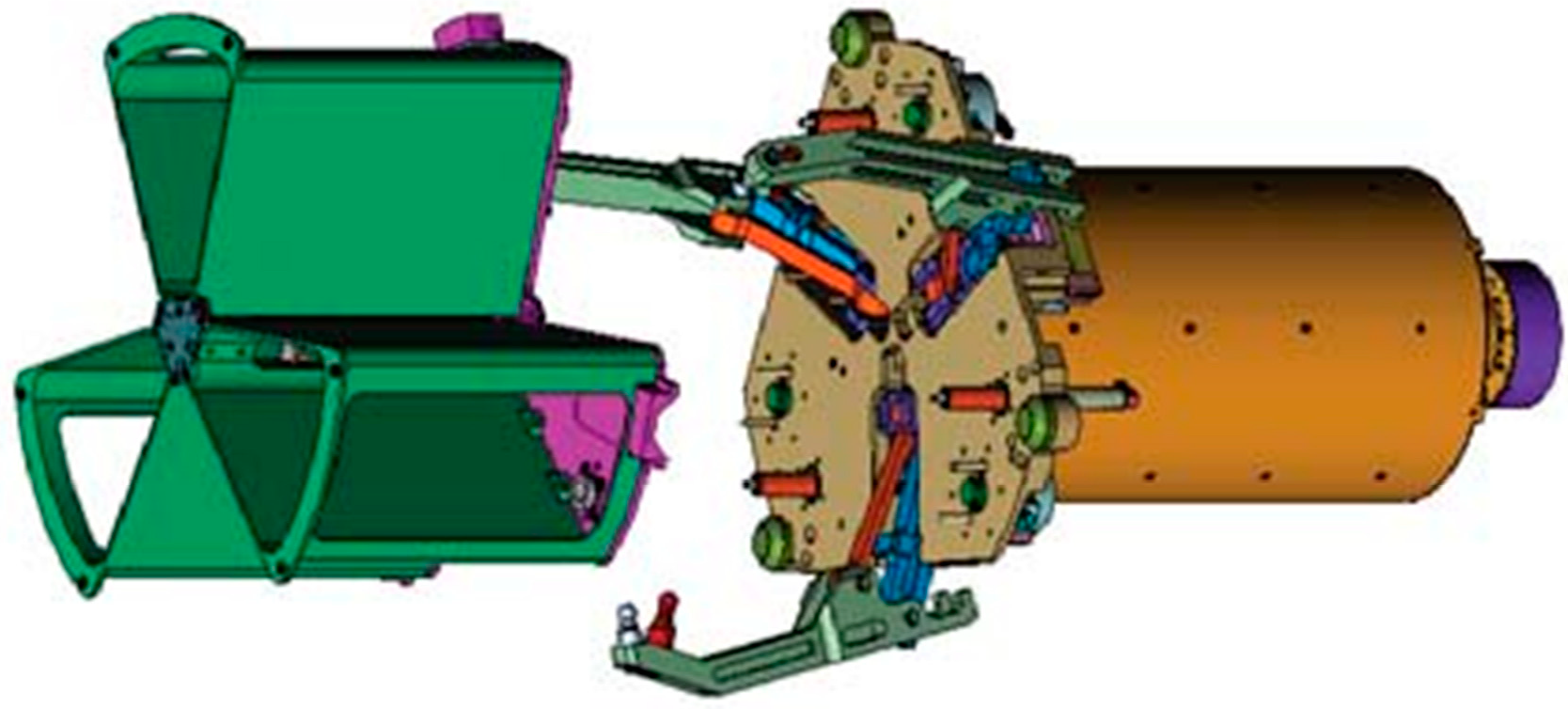
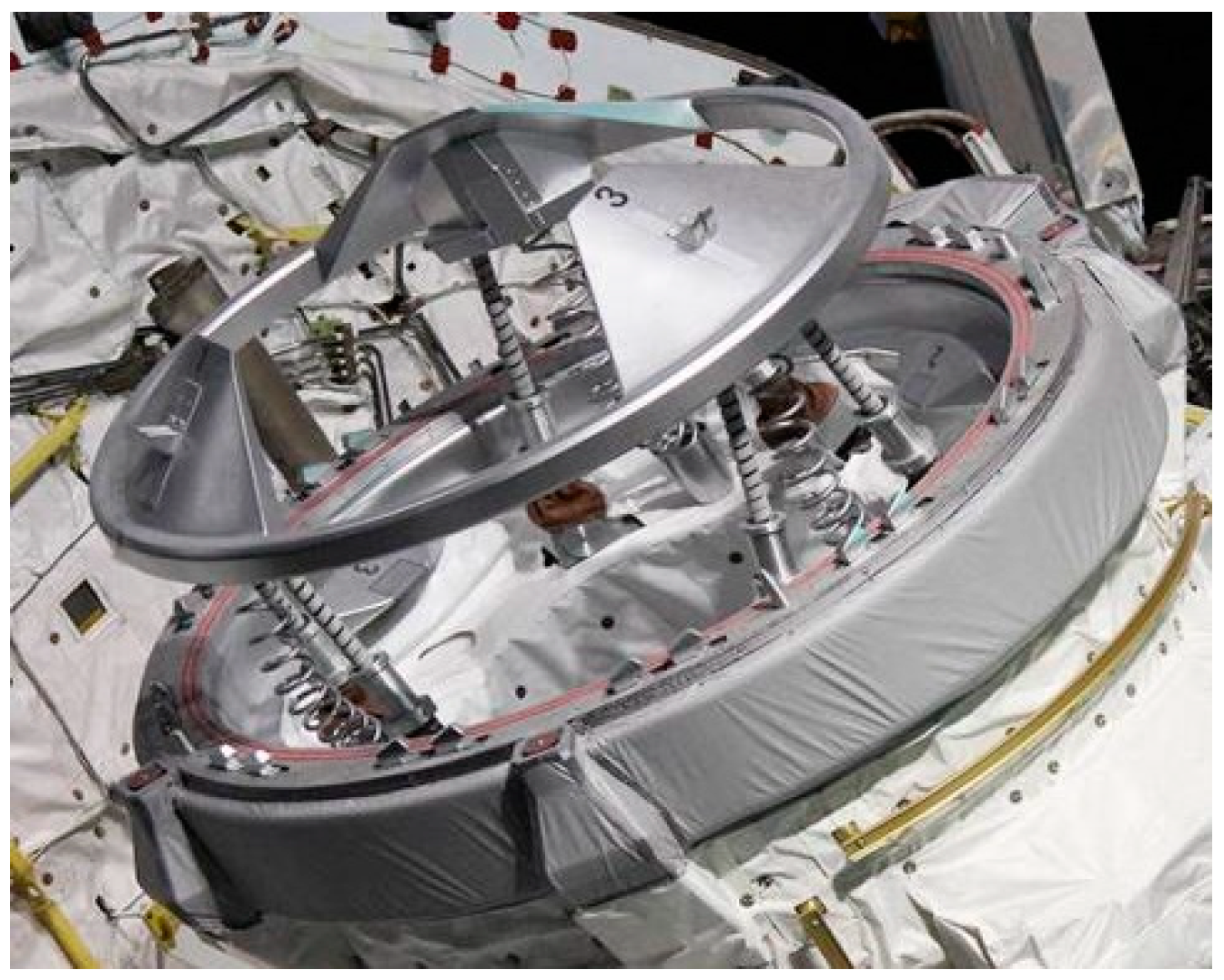
10]. The active part contains a three-linked-finger mechanism, seen in
Figure 1, which opens its spring-driven fingers before docking to form a large capture space, and is driven by a single motor during the docking process to capture and correct a three-petal passive docking part. The end-effector of the passive part is installed with hooks that cooperate with the fingers to keep the connection. The rubber material at the end of the fingertips provides cushioning and collision force control. However, this three-finger docking mechanism utilizes a central configuration, which is not able to form a natural center channel to transfer the sample or other objects between spacecraft. The docking mechanism of Japan’s Experimental Satellite VII (ETS-VII) utilizes a claw configuration and completed the first on-orbit docking in July 1998 [
11,
12]. The active part contains three jaw mechanisms, which can be driven independently, and the passive part contains three sets of locking handles, which can realize the capture, correction and connection of two spacecraft. The natural center channel is formed by using the peripheral configuration and can be used for arranging the circuit and liquid replenishment device, but its capture performance is a little poor [
12]. The Autonomous Micro-Satellite Docking System (AMDS) led by Michigan Aerospace Corporation (MAC) contains an active part of the retractable flexible rod and a passive part of the tapered structure. The passive part cooperates with the active flexible rod for capture. The magnetic force at the top of the rod achieves initial connection retention, and the flexible rod is pulled back to achieve alignment and structural connection through three locating pins. However, the flexible rod is difficult to validate on the Earth’s gravity [
13,
14,
15], and the centered configuration is not conducive to form the item transfer channel, so AMDS has not been validated yet.
This paper focuses on the lunar sample return mission, which requires the completion of docking between two unmanned spacecraft on lunar orbit to realize sample transfer. The mass of the two spacecraft docked on lunar orbit is about 2.0 tons and 0.4 tons. Their absolute mass is smaller, but the relative mass ratio is much larger, compared with the low-Earth-orbit spacecraft. The docking mechanism needs to automatically accomplish the capture correction and connection hold function of the two spacecraft on lunar orbit, in the middle of which, a channel for sample transfer needs to be formed. Therefore, the authors of this paper present the design of a new type of docking mechanism with a peripheral configuration of the active capture claw.
The design of this docking mechanism is very challenging due to the requirements of being lightweight and having miniaturization, where the capture correction and connection hold functions will be realized by the single mechanism. In the design of the docking mechanism, the functions of capture correction and connection hold give different requirements of the loads on the docking mechanism. During the capture correction process, small mass spacecraft are prone to bounce back at high speeds due to the excessive collision forces, resulting in capture failures. Active capture motion introduces additional energy that also increases the collision force. Excessive collision forces may also cause structural damage. Therefore, the capture correction process expects small contact collision loads. However, during the connection hold process after the capture correction is completed, the docking mechanism is required to withstand loads from multiple directions of the docking surface to ensure the stability of the combined spacecraft [
16]. Therefore, a high load-carrying capacity is desired during the connection hold process. The design of the stiffness of the docking mechanism directly affects the force load between the docking mechanisms, and it is very important to analyze and design the stiffness of the docking mechanism. Selecting the appropriate stiffness to control the loads between the docking mechanisms is the key technique in the design of docking mechanisms. The ETS-VII of Japan requires collision avoidance processes, resulting in poor capture performance. The Orbit Express of the U.S. reduces the collision force by the damping of the rubber material at the end of the docking mechanism, but at the same time, it is not favorable to maintain the connection after docking due to the low stiffness of the connection. The existing docking mechanism stiffness design research is so limited that it is difficult to guide the active capture claw docking mechanism stiffness design. Therefore, in this paper, the stiffness design of the docking mechanism is carried out in depth.
The second part of this paper introduces the lunar sample return docking mission and the whole docking process. The third part introduces the general design idea. The fourth part introduces the stiffness design of the capture correction process. The fifth part introduces the stiffness design of the connection hold process. The sixth part introduces the simulation verification. The general design mainly adopts the exploratory research method. The preliminary verification is carried out by the quantitative analysis method and the simulation method. On the basis of the collision dynamics theory analysis, the model is further established by MSC ADAMS and Abaqus, and the simulation verification is carried out. The real product is verified by the flight mission. The last part is the conclusion.
3. Principle of Stiffness Design
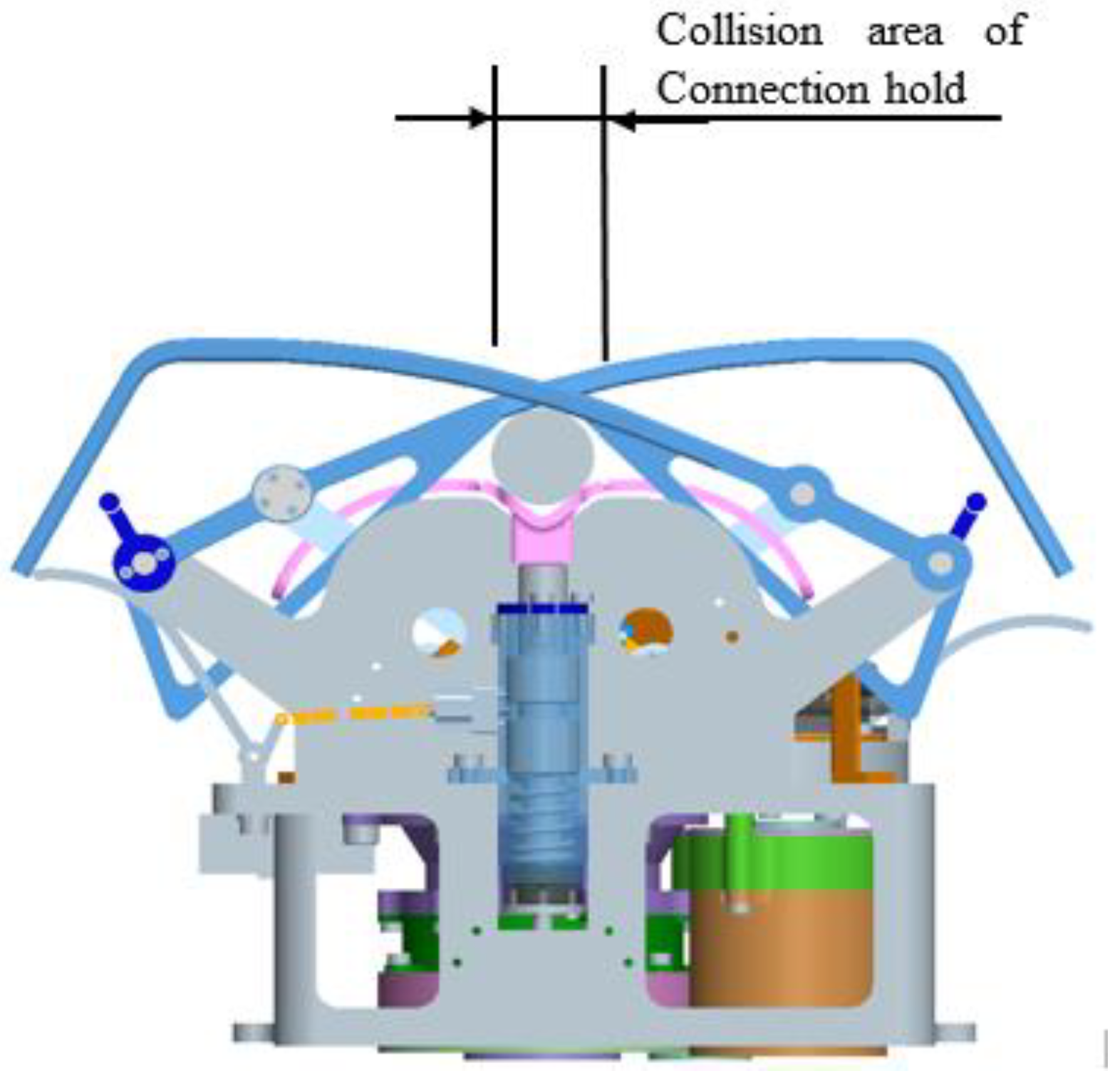
Stiffness design has a significant impact on the function, performance and quality of the docking mechanism and is one of the key points in the design of docking mechanisms. Due to the difference in requirements between the capture process and the connection process, large docking mechanisms generally have separate stiffness designs for the flexible capture system and the rigid connection system to meet the functional specifications. In addition, there is a need for a synergistic design of layouts and work strokes [
18,
19,
20]. Generally, the flexible capture system is installed in the center position, which mainly solves the design problems of stiffness and damping parameters, such as collision rebound and energy dissipation, while the rigid connection system is installed in the peripheral position, which mainly solves the problems of sealing, large load bearing and reliable separation, seen in
Figure 9. This design, which requires two systems, a flexible capture system and a rigid connection system, is mainly used for the docking mechanism of a manned spacecraft as shown in
Figure 9 [
21,
22,
23,
24]. However, the large mass and size of the manned spacecraft docking mechanism are not suitable for docking missions of small spacecraft.
The design of the stiffness of the active capture and claw-type docking mechanism is also divided into two parts: capture correction and connection hold. The stiffness of the capture correction process is mainly realized through the structural optimization design of the claw to ensure that the collision load matches the structural strength during the docking process. The stiffness of the connection hold process is mainly for the demand of connection bearing. Through the force analysis of the connecting rod mechanism, the strength and transmission requirements are proposed to ensure the connection hold function of the docking mechanism. Both stiffness properties are integrated into one single claw-type mechanism through coordinated optimization. Moreover, this stiffness-integrated design effectively reduces the mass and envelope size of the docking mechanism compared to the traditional two stiffness-independent designs.
4. Stiffness Design of Capture Process
As the first step in the docking process, the capture function is the foundation of the docking function. During the capture process, due to the relative lateral and axial velocities between the two spacecraft, the collisions will happen between the active and passive docking mechanisms. Although the collision force of the claw docking mechanism in this paper is significantly lower than that of the large docking mechanism, it still has a huge impact on the docking performance and structural strength, so it is necessary to analyze and propose reasonable design indexes of the claw strength and the equivalent stiffness.
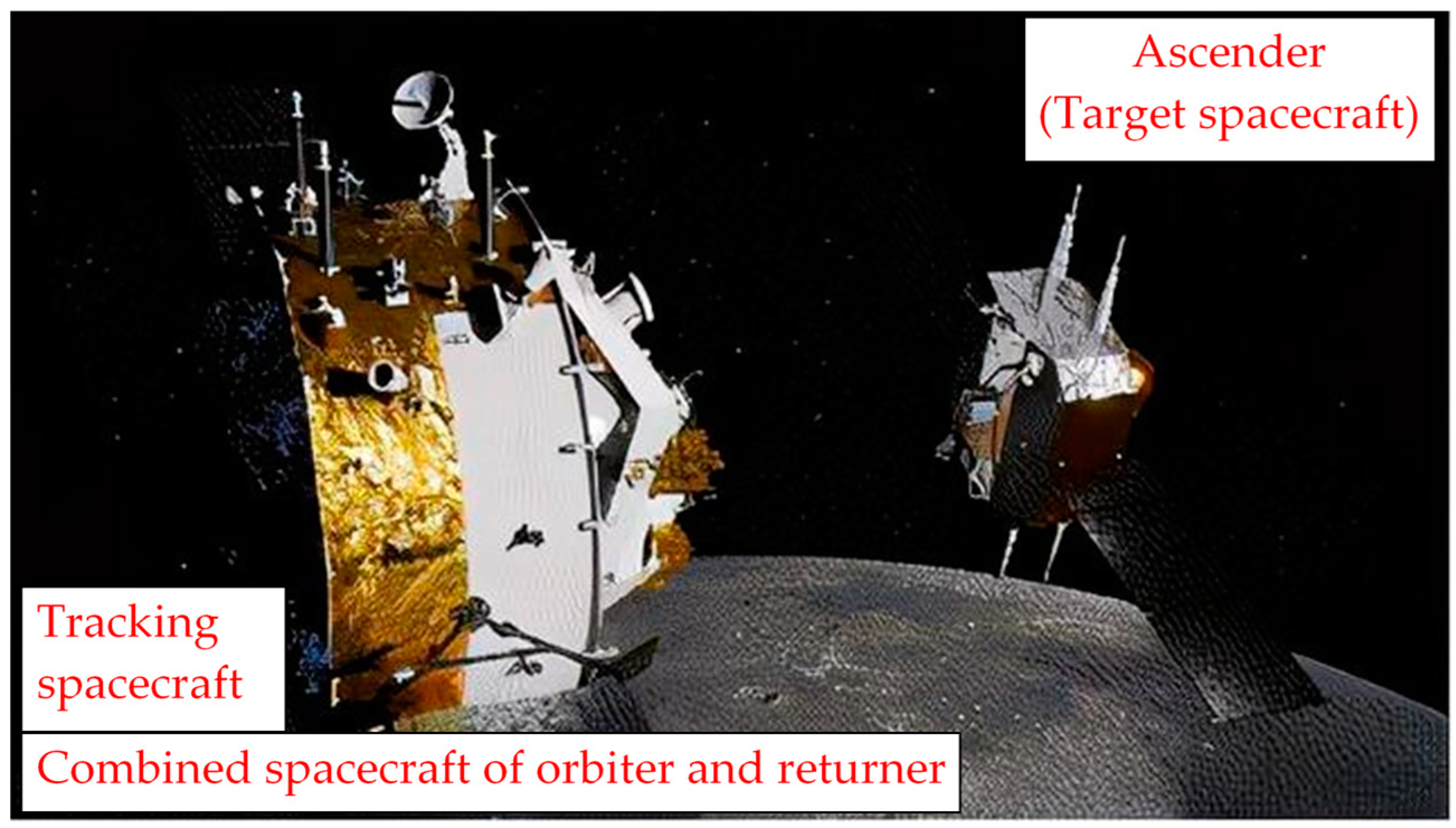
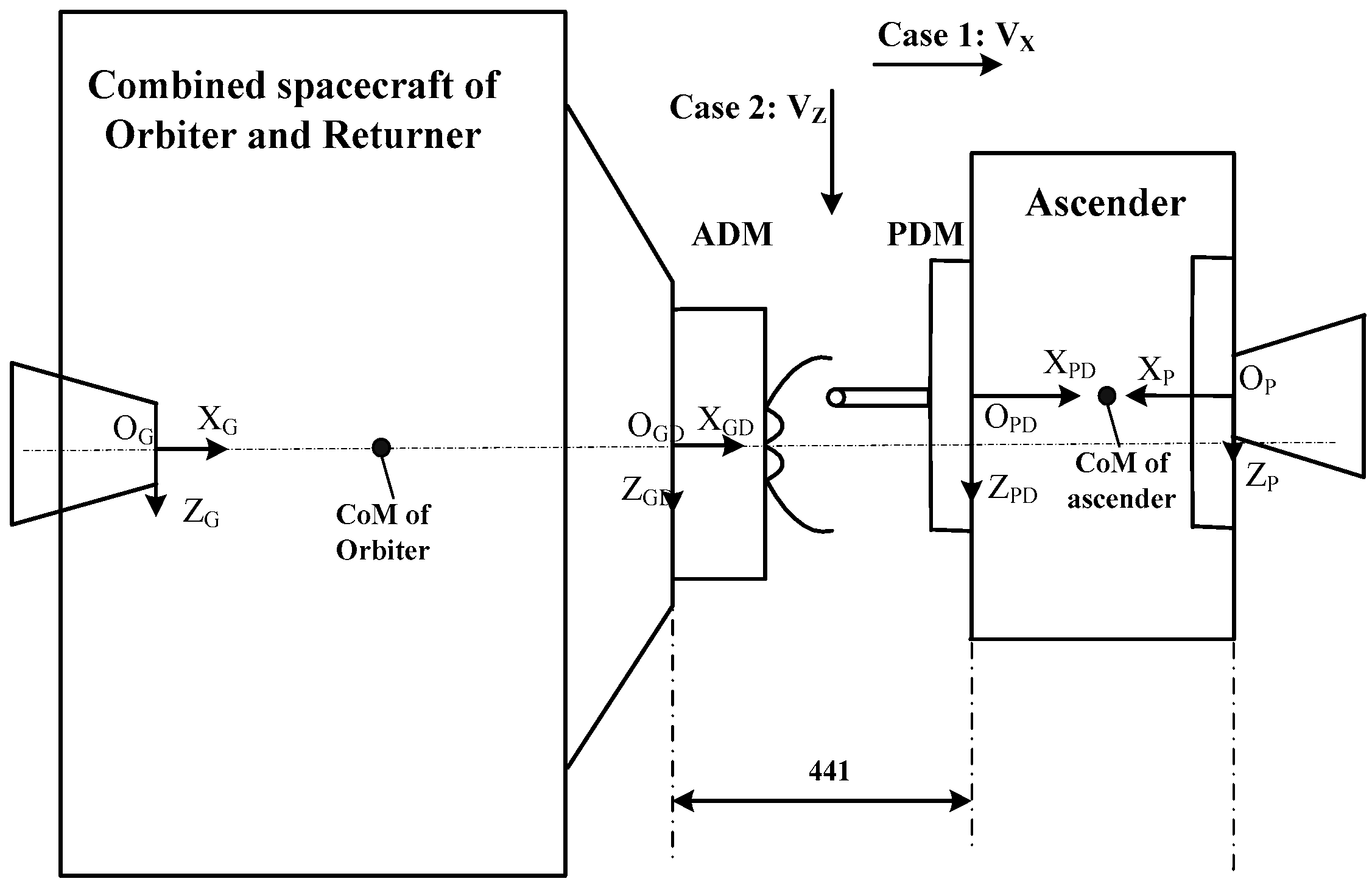
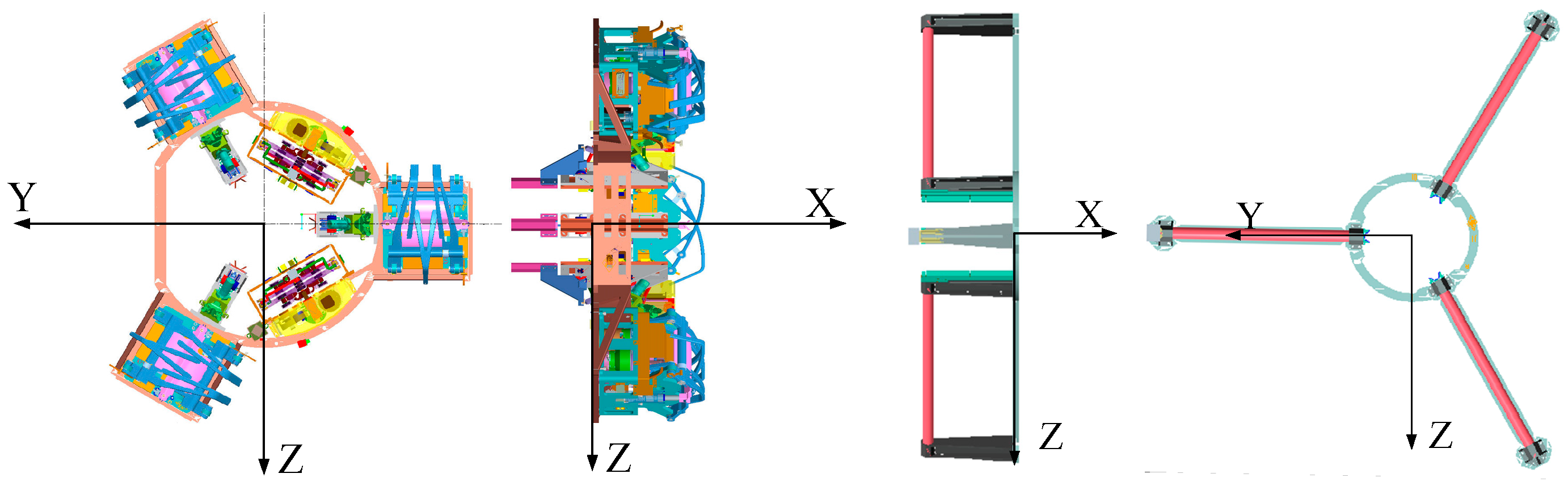
The initial deviation condition captured by the docking mechanism is called the initial docking condition and is the basic input condition for the design of the docking mechanism. The initial docking conditions are defined within the coordinate system of the two sets of docking surfaces, seen in
Figure 10. O
G-X
GY
GZ
G is the mechanical coordinate system of the tracking spacecraft (combined spacecraft of the orbiter and returner). O
P-X
PY
PZ
P is the mechanical coordinate system of the target spacecraft (ascender). O
PD-X
PDY
PDZ
PD is the docking surface coordinate system of the target spacecraft (ascender). O
GD-X
GDY
GDZ
GD is the docking surface coordinate system of the tracking spacecraft (ascender).
The collision process between docking mechanisms needs to be considered when docking mechanisms are captured. The collision is mainly caused by the relative velocities between the active and passive docking mechanisms, including the initial relative velocity between the two spacecraft and the velocity generated by the capture motion of the holding claws. The forces generated by the collision can lead to changes in the motion of the spacecraft, causing a risk of separation. Therefore, the claw-type mechanism is required to move rapidly before and after the first collision to form a closed space to ensure that there is no further separation between the two docked spacecraft. The rapid motion of the claw is closely coupled with the magnitude of the initial collision load, which is a key point for modeling and analysis.
Collisions in any direction can be decomposed into a combination of axial and lateral collisions. In order to simplify the analysis process, the force cases of axial collision (Case 1) and lateral collision (Case 2), as shown in
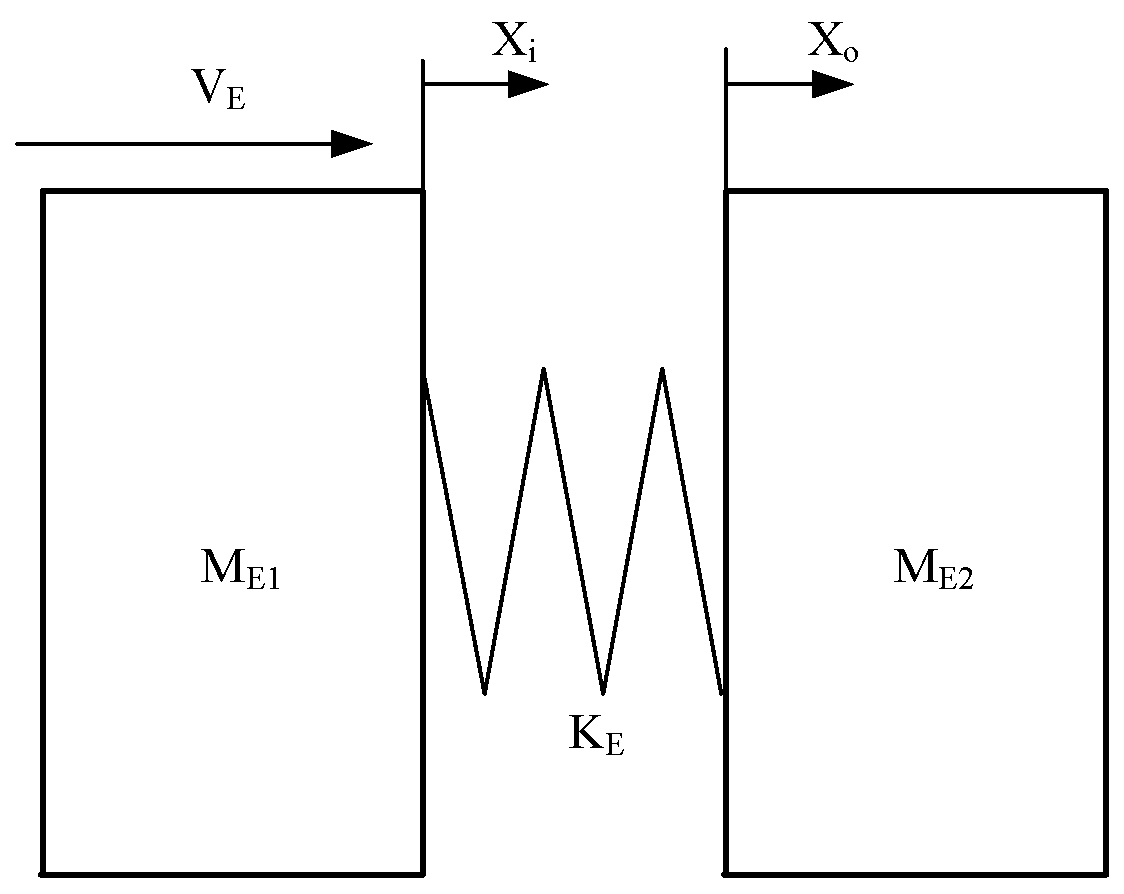
Figure 10, were modeled and analyzed separately. The collision at the location of the initial contact of the docking mechanism produces elastic deformations and causes the changing movements of the spacecraft. This process will be equivalent to an elastic collision model in theoretical calculations, seen in
Figure 11. For the other collision cases, under the condition that the same control method was used for the initial conditions, it can be decomposed into a combination of the two working conditions. As a result, the peak value of the collision load remains unchanged.
Losses, such as frictional resistance and material damping, have a small effect during collisions, so these losses are neglected. Assuming that energy is conserved during the collision of the two spacecraft, that the initial relative kinetic energy is converted to elastic potential energy and that a collision load is generated at the point of contact, the following equations can be written:
where
xi is the displacement of the active tracking spacecraft and
x0 is the displacement of the passive target spacecraft and
a1 and
a2 are the accelerations of two spacecraft. F is the collision force;
is the equivalent stiffness of impact point;
and
are the equivalent masses of two spacecraft; and
is the initial relative velocity of two spacecraft. Considering that the lateral deflection of the axial collision is small, the deflection motion and its effects are ignored in the model for Case 1. The two working condition parameters were calculated differently, and their differences are shown in
Table 2.
When the condition
is satisfied, the relative velocity of the two spacecraft is zero. At this time, no more structures are compressed and the collision force between the spacecraft reaches its maximum value. The time of the lock handle entering the capture range, collision, recovery and finally rebound separation to escape from the capture range can be used to hold the claw to form a closed space. Solving the above Equations (1)–(5) leads to the result:
where
is the equivalent mass of the two spacecraft. According to Equation (7), it can be seen that the equivalent stiffness and equivalent collision velocity of the contact need to be optimally designed in order to control the collision load during the capture process when the mass characteristics of the spacecraft are determined. The main design constraints are:
Less stiffness reduces the maximum crash load and increases the space available for claw closure. However, too little stiffness can lead to an insufficient structural load-bearing capacity for subsequent calibration and locking functions, or even increase the risk of large end deformation or structural damage during calibration or of escape of the locking handle from the capture space;
The most significant influence on the collision load is the equivalent relative motion velocity. In addition to the initial relative velocity, the velocity of the claw’s own movement also has a large influence. Slow capture velocity is effective in reducing collision loads, but is not conducive to rapid formation of closed spaces. Excessive capture velocity can cause a dramatic increase in the collision load, leading to an increase in the weight of the claw-type mechanism and drive mechanism, which is not conducive to the lightweight design of the mechanism. So, the capture performance and light weight need to be balanced in design;
In summary, the claw-type mechanism stiffness design needs to be lightweight on the basis of multiparameter and multiconstraint design in terms of collision stiffness and capture motion velocity, etc. Considering the driving power of the claw-type mechanism and the load-bearing strength, the lock handle and other structures are designed to have a maximum load limit of 300 N. The velocity of the claw’s capture motion is influenced by the drive power and the drive mechanism, so the maximum velocity of the collision position on the claw is designed to be 0.1 m/s. According to the envelope size of the spacecraft and the layout, the distance between collision position and the center of mass of the active and passive spacecraft is 1.7 ± 0.05 m and 0.55 ± 0.05 m. By substituting the known parameters into Equation (7), the calculation result can be obtained that the contact stiffness of the claw at the collision position should be satisfied with less than 25 N/mm, so that the collision load is not greater than 300 N.
5. Stiffness Design of Connection Hold Process
In order to ensure that the claw can withstand sufficient vibration loads in the subsequent stages to meet the requirements of continued operation, it is also necessary to carry out a stiffness design analysis for the claw-type docking mechanism. After the two spacecraft have completed docking, the claw mechanism also needs to have the ability to overcome various external loads. The docking surfaces should not separate, and the positioning accuracy of the docking can be maintained. According to the attitude control requirements of the combined spacecraft after docking, the external loads on the docking surface are about a 30 Nm bending moment and 25 N axial tension under the action of various attitude control engines.
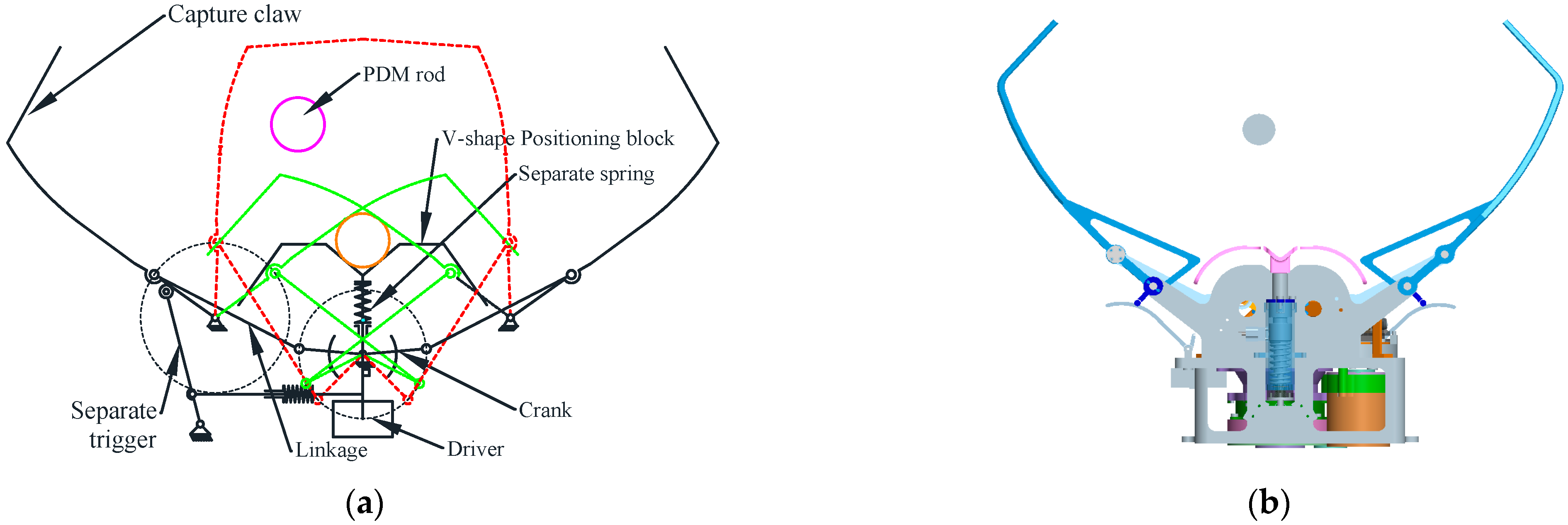
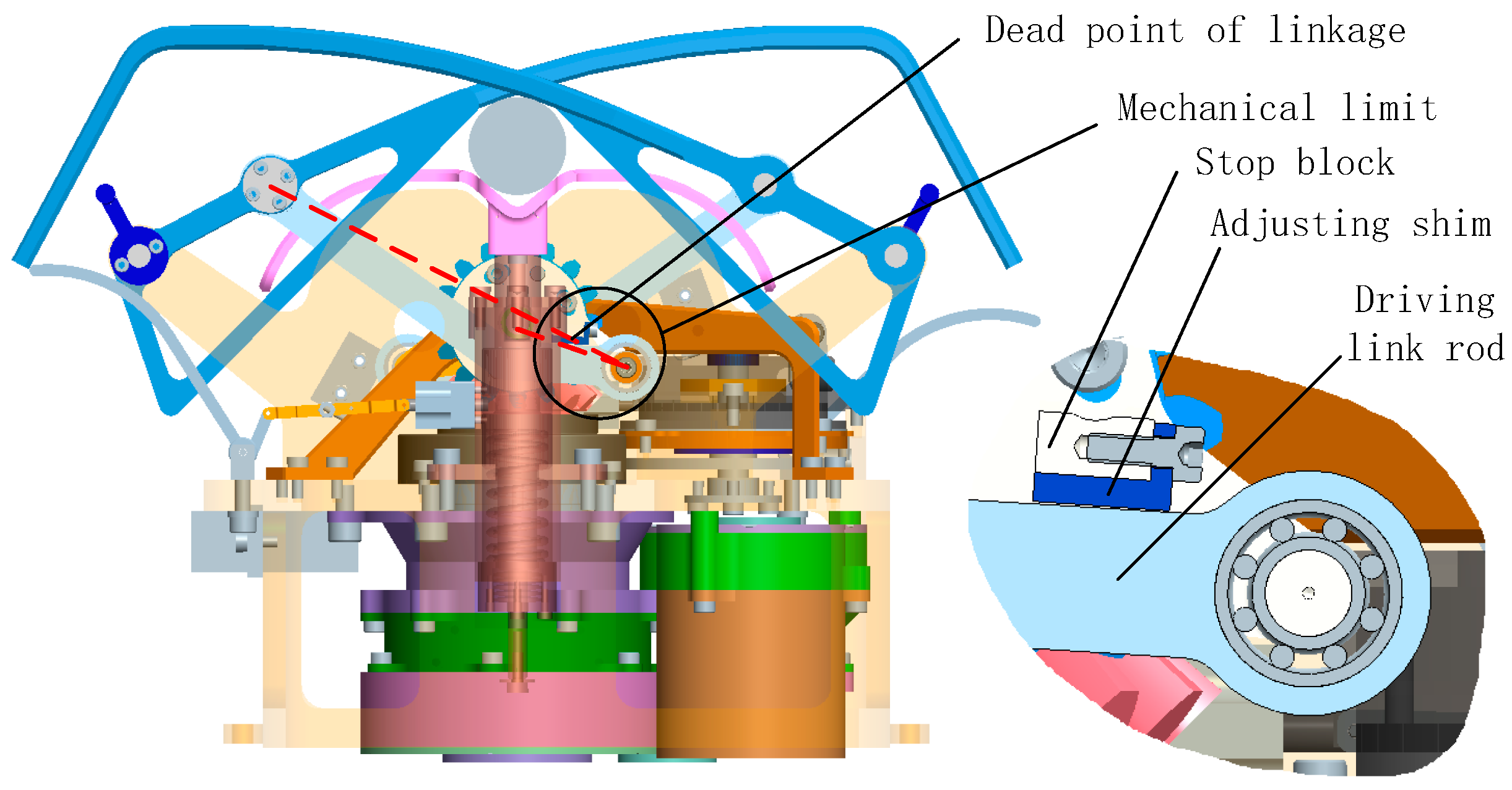
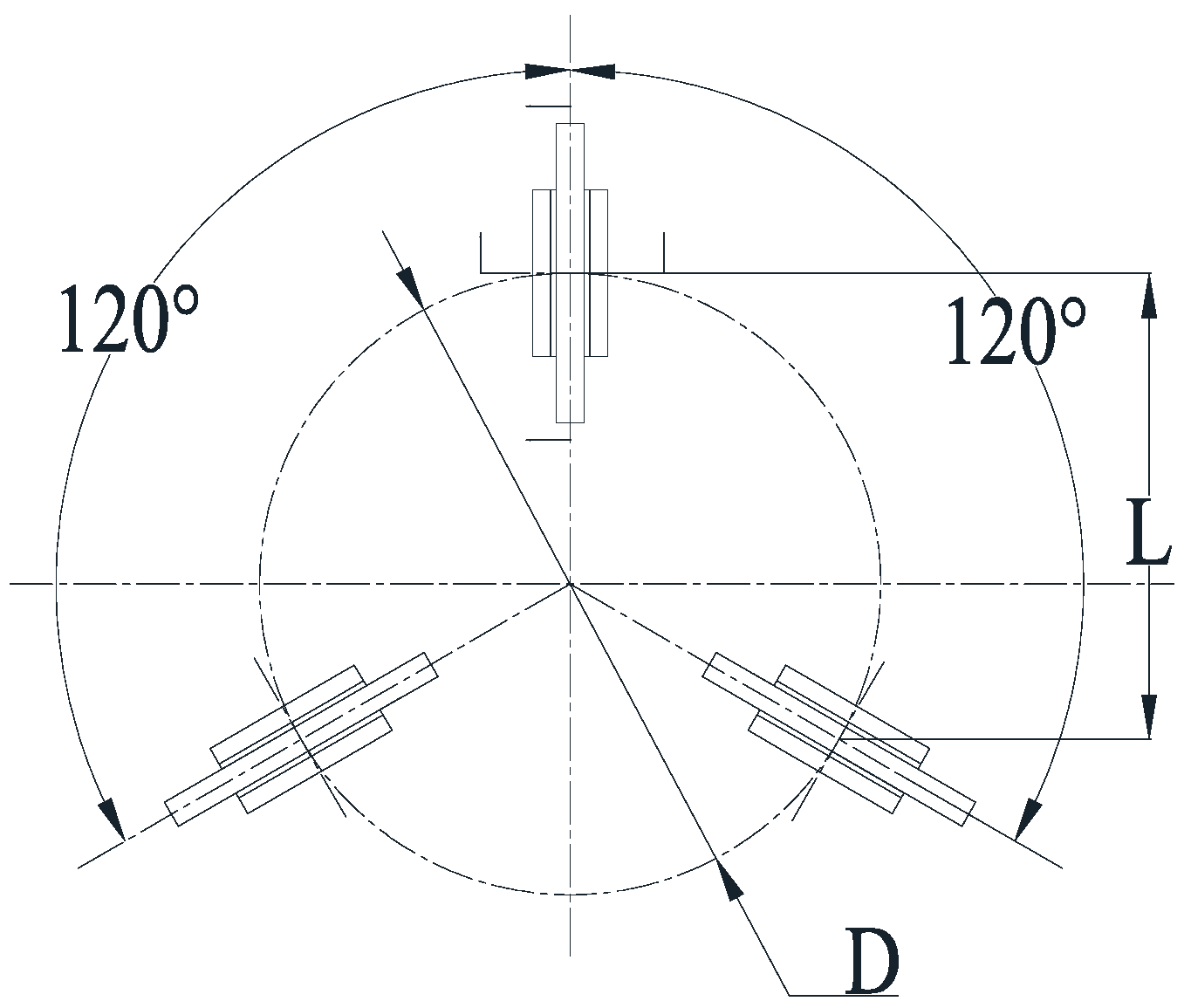
The claw-type mechanism adopts a crank-rocker mechanism to drive the connecting rod over the dead center to realize the self-locking of the mechanism in the locking state. In addition, the claw drive mechanism is also self-locking in the reverse direction. Therefore, in the locked state, the load-bearing function of the docking mechanism is mainly realized by the locking claw structure. In order to maintain the locking state, the load capacity of the combination of multiple claw-type mechanisms should be larger than all external superimposed loads. The worst case of a moment load is the sum of the moment equivalent tension and external tension in one single set of claws. For the three-point layout, the bending moment formed by rotating around the axis of the two sets of claws produces the greatest tensile load on a single set of claws. The corresponding flipping arm of force is, in the case of a 120° distribution of the three locking points, equal to 1.5 times the radius of the distribution circle, seen in
Figure 12.
Considering the number of claw mechanisms and the diameter of the distribution circle and other parameters, the requirements for a single set of claw mechanisms to carry external tension loads are:
where
is the average distribution diameter of the claw-type mechanism (about 700 mm),
is the external bending moment, and
is the external axial tension. Substituting the above parameters into Equation (8) gives:
In this paper, we took the value .
In order to reduce the tolerance requirements for subsequent sample transfer, the accuracy of the docking mechanism needs to ensure that the maximum deformation under the rated load is
[
25]. In addition, the left and right sides have
claws to carry the load together. As a result, the stiffness of the locking point of the claw under the external load is not less than
. It can be seen that the stiffness requirements of the capture process of 25 N/mm and the connection hold process of 85 N/mm are not consistent. Therefore, it is necessary to optimize the design using a variable stiffness configuration of the claw-type mechanism to ensure that both functions are effective.
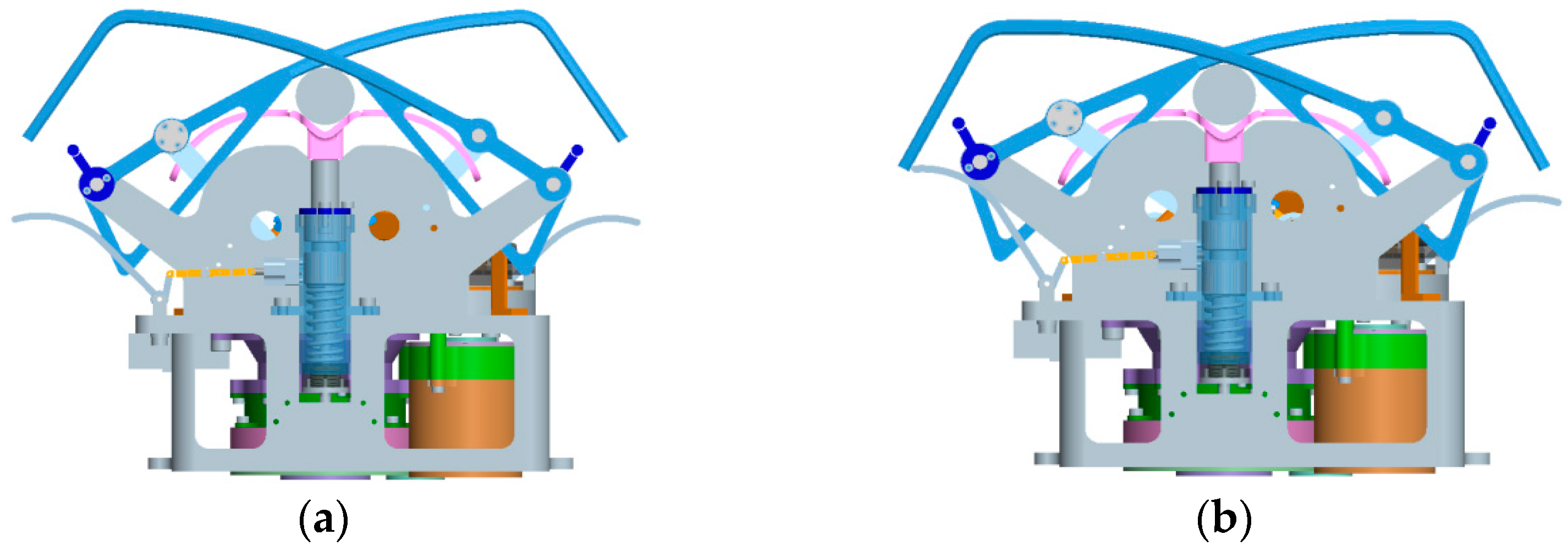
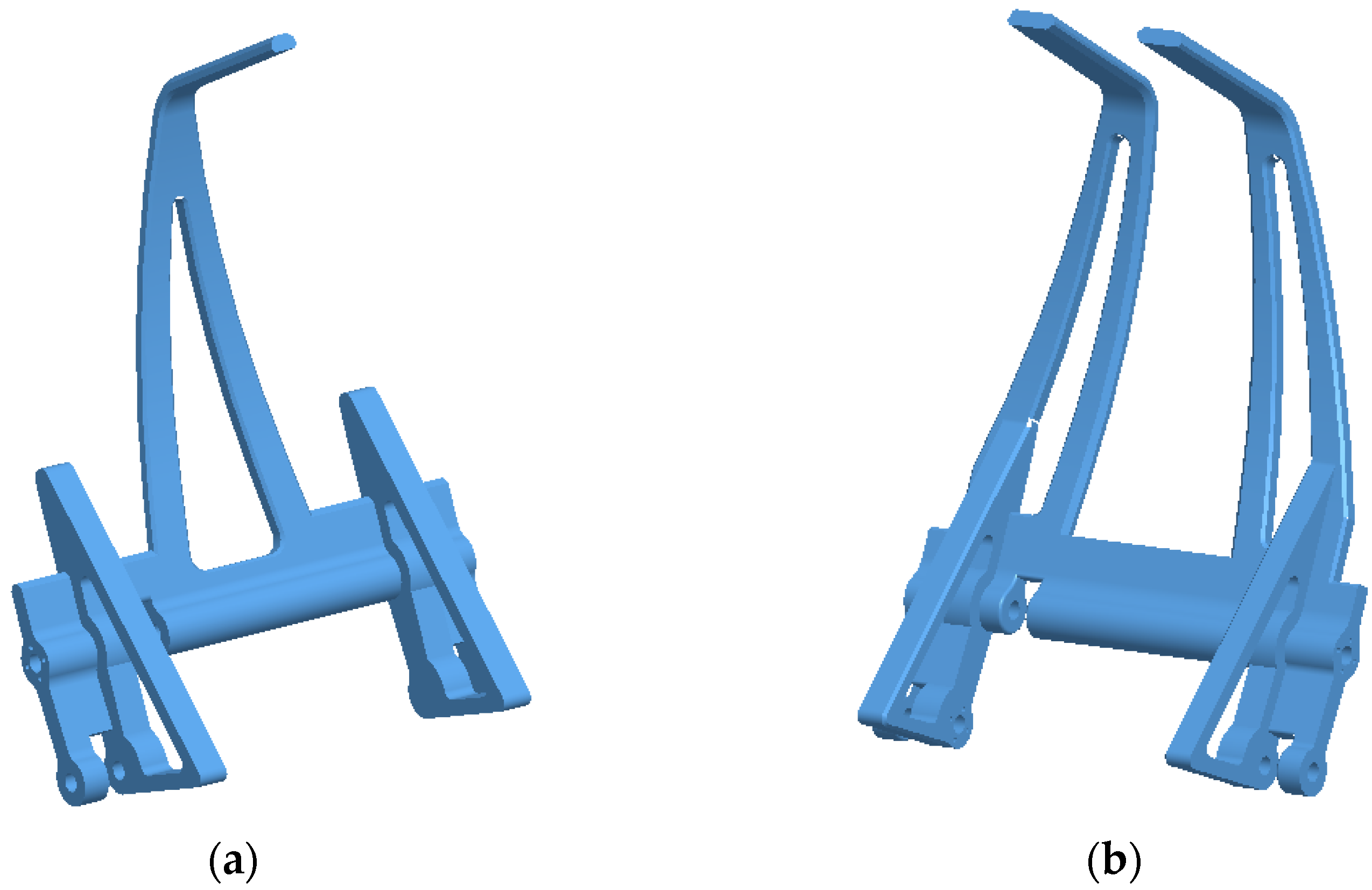
The design of the left and right locking claws mainly considers the capture process using the middle and upper part of the claws. The left and right claws are designed with equal stiffness and strength to meet the needs of the capture load. At the same time, in order to ensure the compatibility of the left and right claws in the process of grasping, single and double claw configurations are used. The connection hold function requires a reinforcement at the root position of the claws, as shown in
Figure 13. Therefore, the load-bearing stiffness of the claw is enhanced by increasing the structural cross-section and using reinforcement bars. Considering the lightweight and strength requirements, the claw material is made of titanium alloy TC4, and the processing method of CNC machining is adopted. The results of the design are shown in
Figure 14.
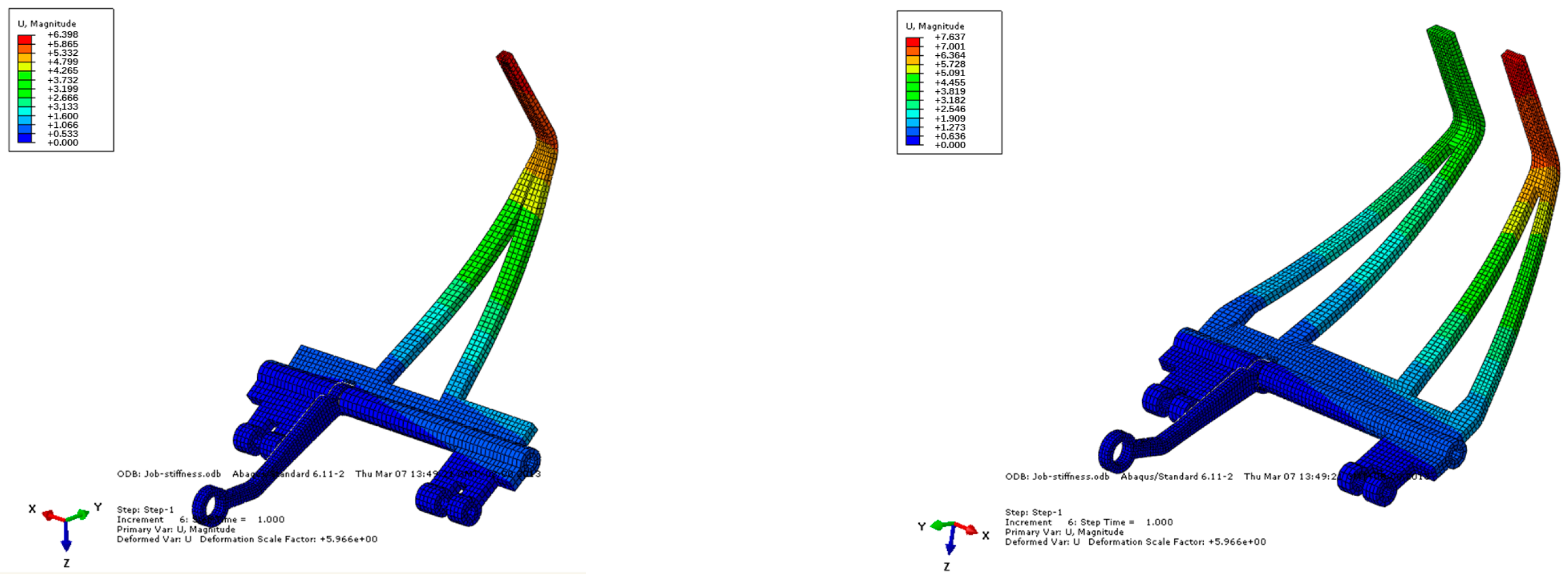
Using Abaqus/Stand 6.11-2 software, finite element modeling analysis was applied for the designed claws. A desired payload was applied to the claw-type structure at the nominal height to analyze the structural deformation and stiffness performance, seen in
Figure 15. From the figure, it can be seen that the average stiffness of the working section of the single-finger claw during capture correction is 22.1 N/mm, and the average stiffness of the working section of the double-finger claw during capture correction is 22.0 N/mm. The maximum deformation under the collision load is about 7.6 mm. The working section for the connection hold of the left and right claws was strengthened to have higher stiffness, with an average stiffness of 95 N/mm, which meets the requirements for the connection hold process.
_Zhu.png)






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}