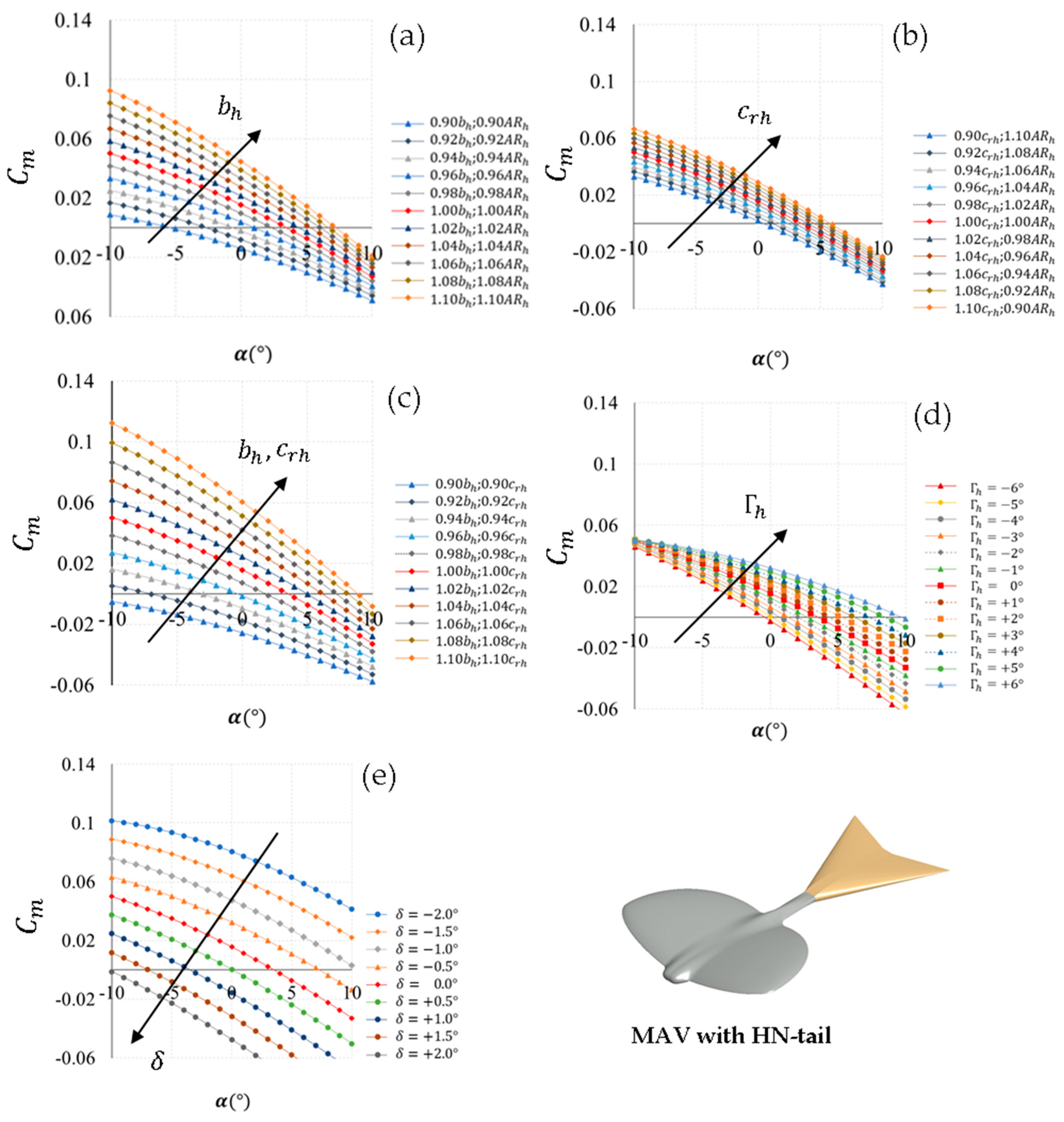
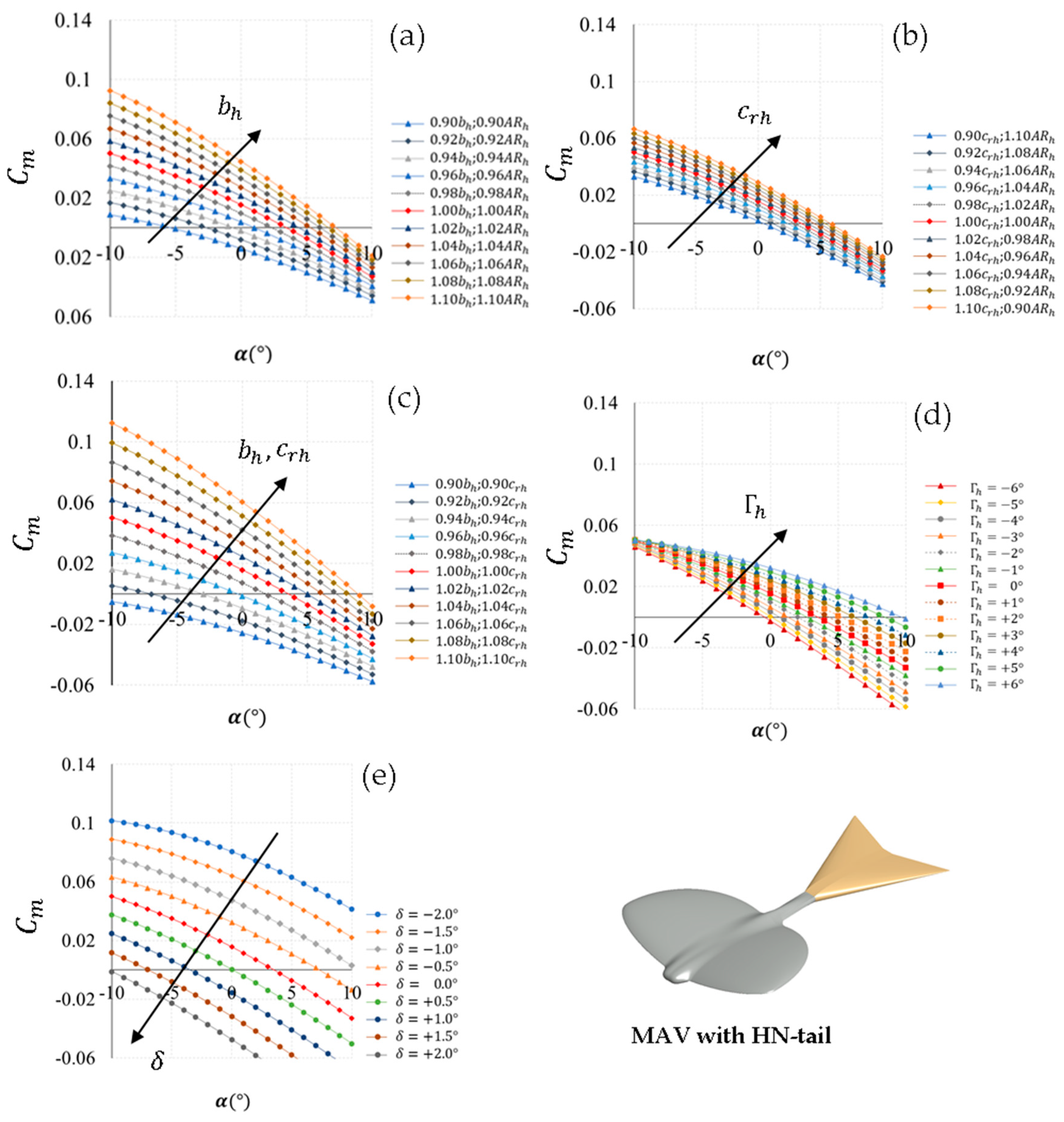
6.1. Longitudinal Stability Analysis of the MAV with HN-Tail
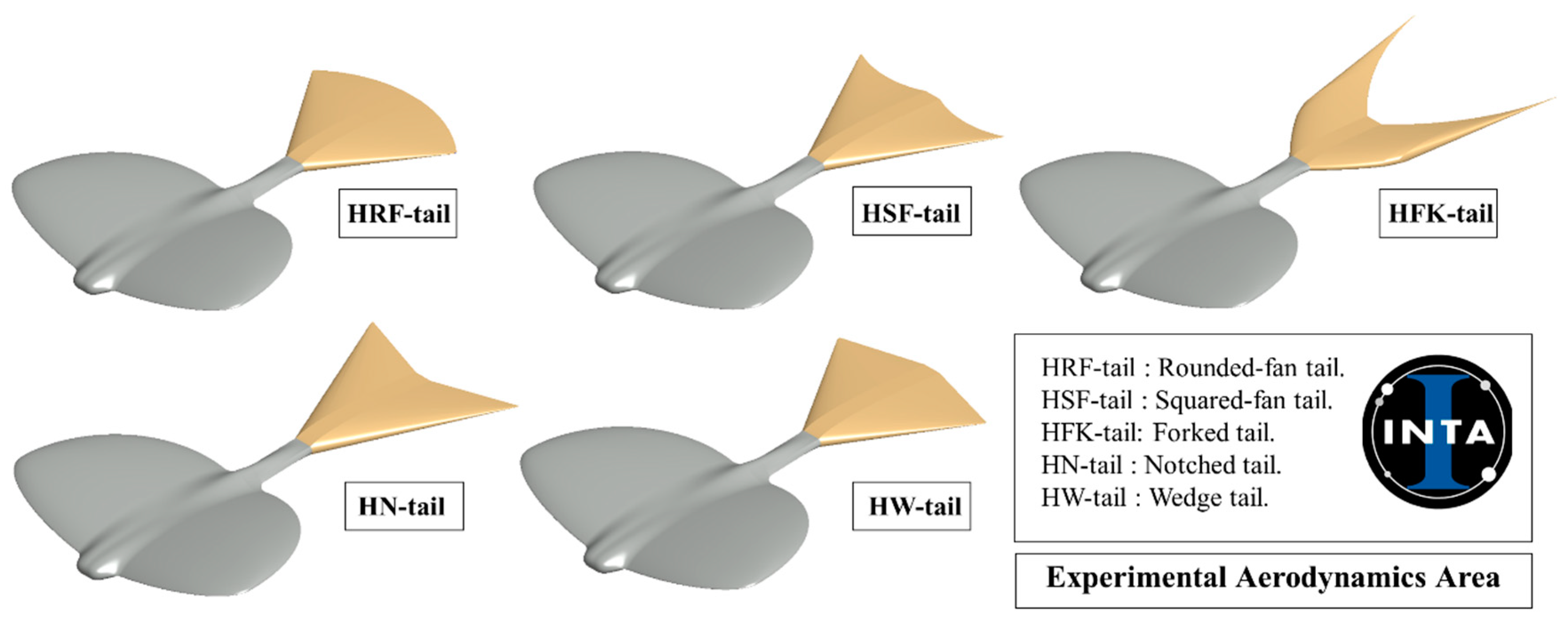
In this sub-section, numerical data obtained from the MAV vehicle with the HN-tail configuration are presented, due to that this tail produces the highest value of the maximum lift coefficient (). The remaining tail configurations present the same trend in lift coefficient and longitudinal stability, as the geometrical parameters of each tail configuration are varied (). The analysis of the results is valid for each of the tail configurations.
When the tail span
) increases and the tail root chord (
remains constant, the longitudinal stability coefficient will be more negative, with an increase in the slope (
). Therefore,
increases as the tail span increases, so the curves move up along the vertical axis. The same behavior occurs in cases where the tail root chord
increases, when both the tail span
) and root chord
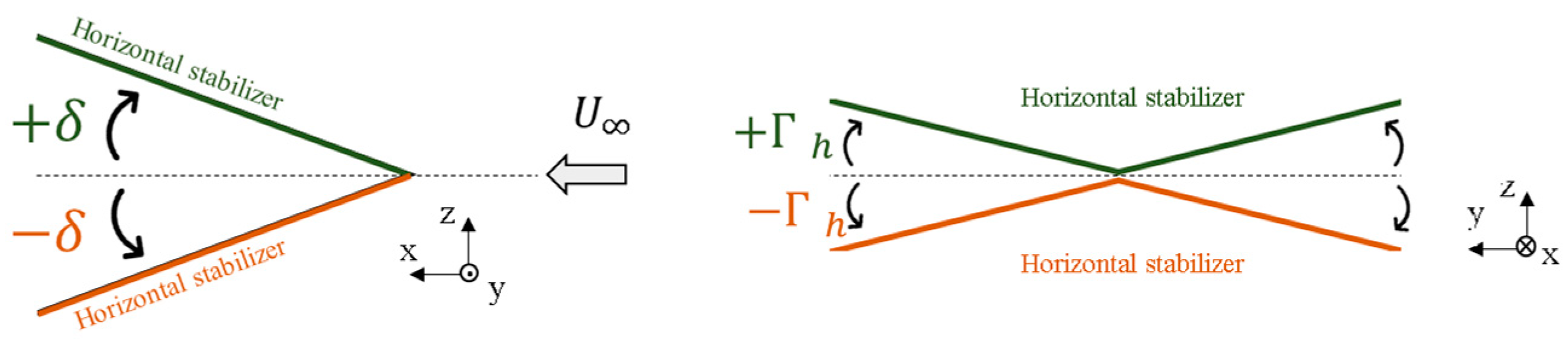
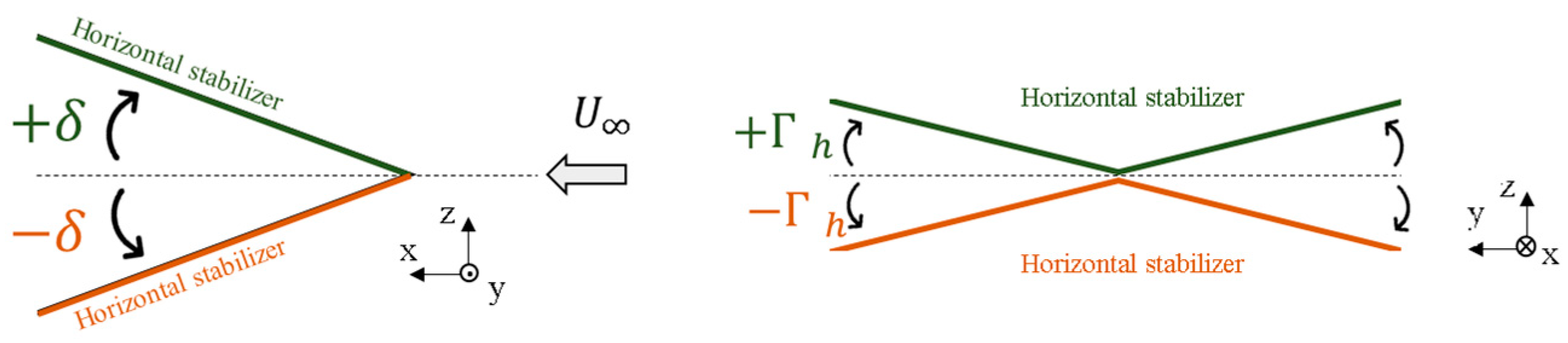
increase, or when the dihedral angle increases (
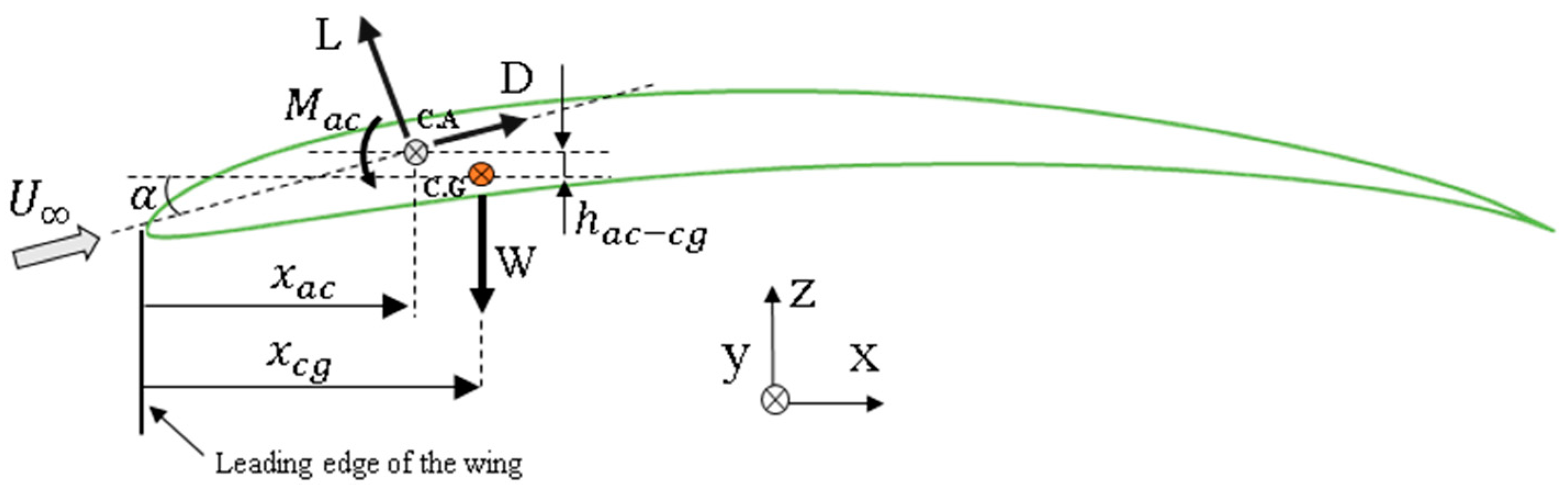
). As the angle of incidence of the horizontal stabilizer (
) increases, the longitudinal distance of the center of gravity
will increase, so the distance between the aerodynamic center
and the center of gravity
will decrease, and this causes the slope
to become more positive (that is, less pronounced). Contrary to the previous cases, the value of
decreases as the incidence angle increases (curves are shifted downward) (see
Figure 12).
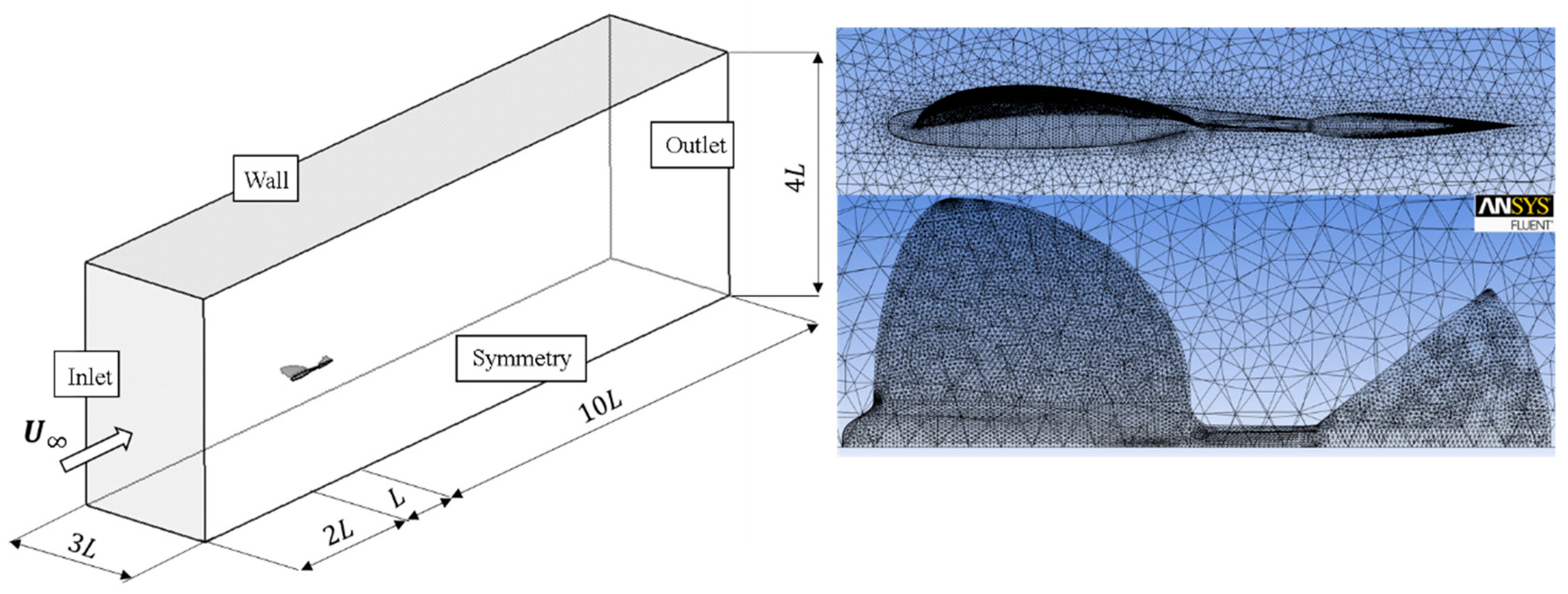
6.3. CFD Study
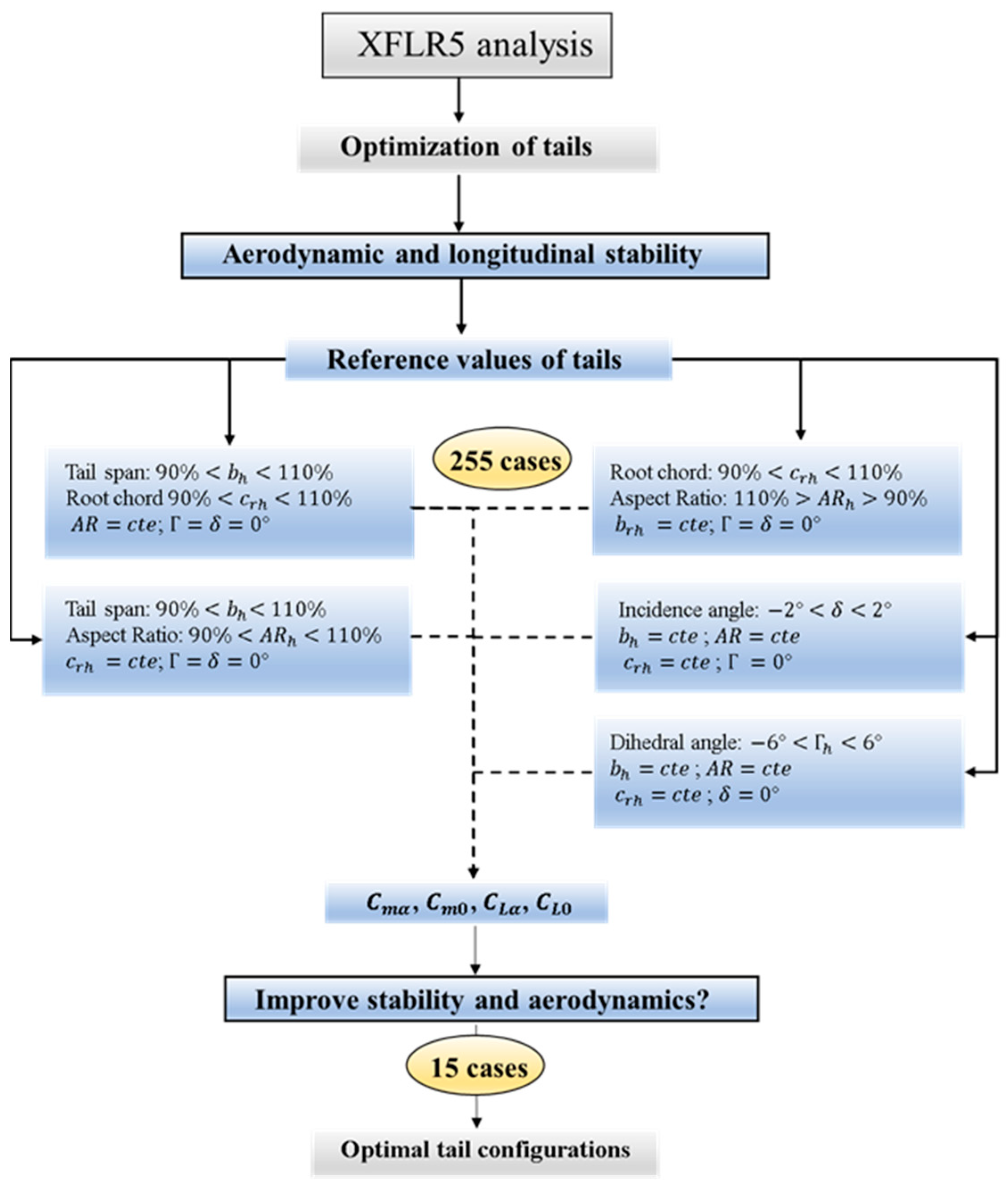
In this section, the numerical data obtained by CFD simulations for the 15 tail configurations defined in
Table 8 are presented. Lift and drag coefficients, polar curve and aerodynamic efficiency for each of the tail configurations were obtained.
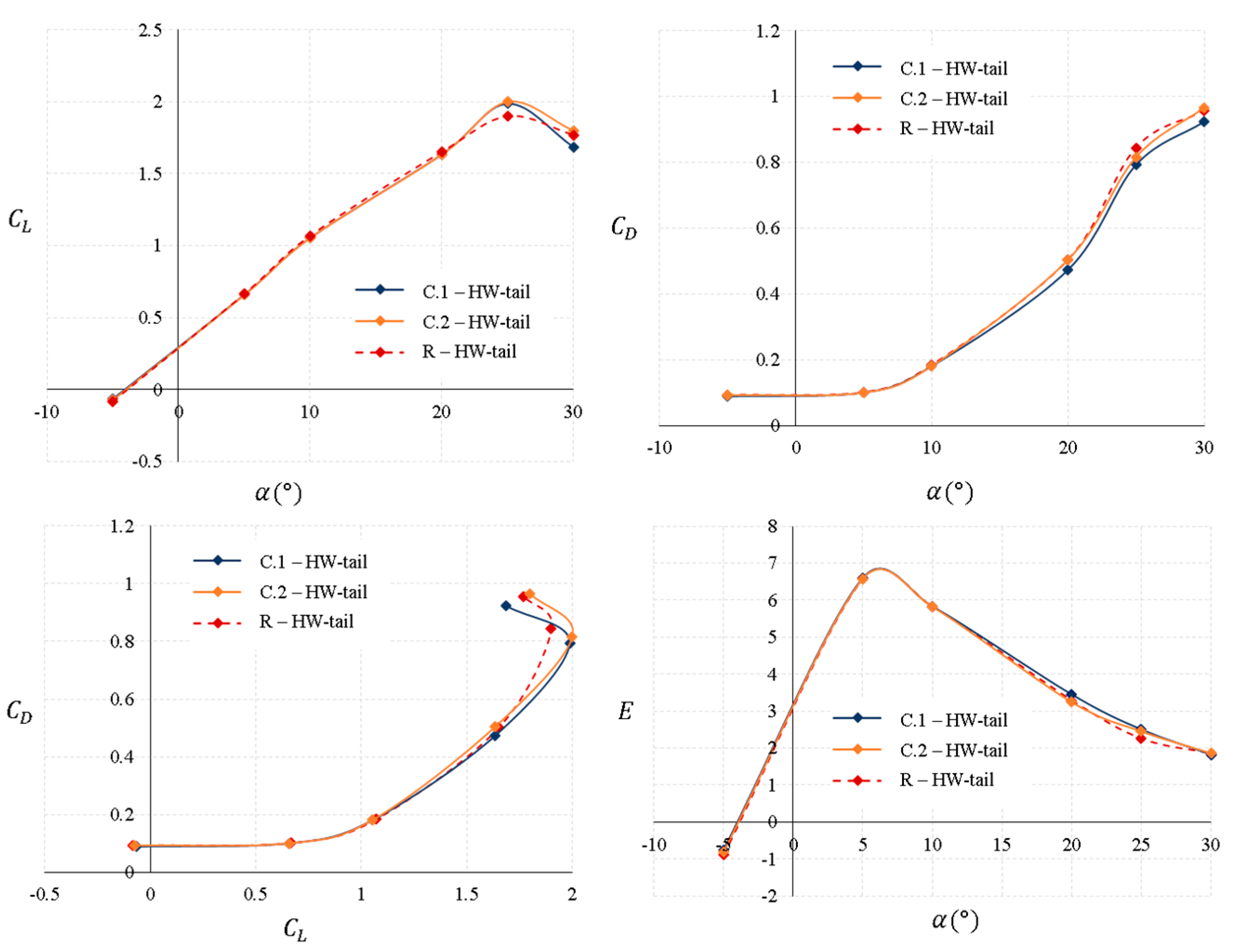
Figure 13 shows the aerodynamic characteristics of the MAV with the HW-tail. The lift coefficient values are very similar for all tail configurations at low angles of attack until reaching the angle of 25°. At this angle, the maximum lift coefficient is obtained for all tail configurations, being higher for the optimal tail configurations (C.1-HW-tail and C.2-HW-tail) than the reference tail configuration (R-HW-tail) due to the decrease in the dihedral angle and the variation in tail span and root chord. Although it is clear from these results that the maximum lift coefficient is obtained at 25°, the flow detachment could be between 20° and 25°, as the step is 5°. The drag coefficient and aerodynamic efficiency values are highly similar for all configurations until the angle of attack of 15°. However, for higher angles of attack, there is a decrease in drag of around 2.15% and an increase in aerodynamic efficiency of around 2.30% in the optimal tail configurations, due to that the dihedral angle is
with slight variations in the tail span and chord.
Table 9 shows the variations in the maximum lift coefficient (
), minimum drag coefficient (
) and maximum aerodynamic efficiency (
) for the HW-tail. Decreasing the tail span (C.1-HW-tail) or increasing the tail root chord (C.2-HW-tail) by 2% with respect to the reference values and with a negative dihedral angle has the same effect on the aerodynamic parameters. In both tail configurations, there is a slight decrease in the value of
, a strong increase in
up to 13% and practically no change in aerodynamic efficiency. It seems that the decrease in the tail span (C.1-HW-tail) would give a slight improvement in the aerodynamic performance of the vehicle.
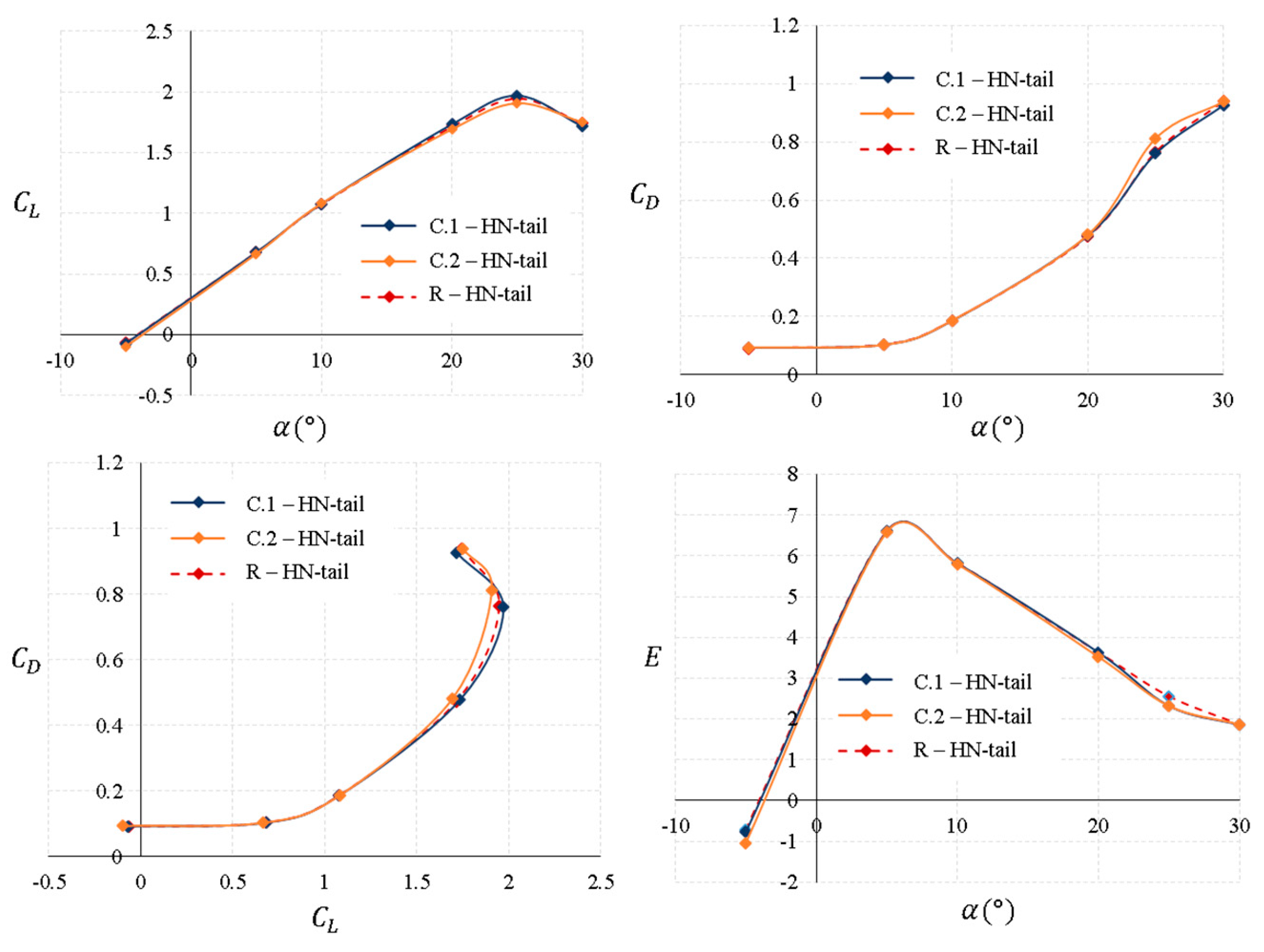
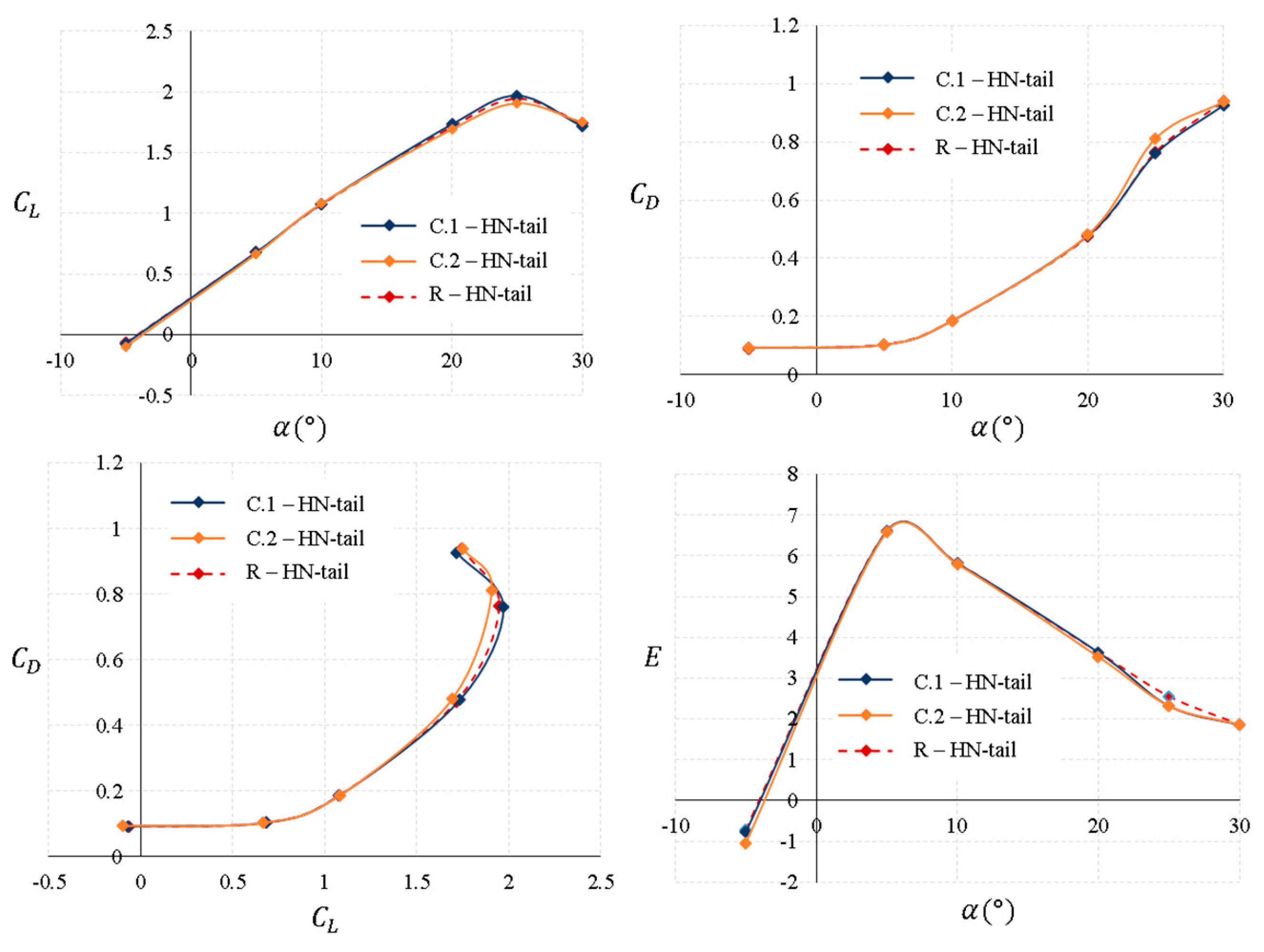
Figure 14 shows the aerodynamic characteristics of the MAV with the HN-tail. These tail parameters are the same as in the previous case. There is a decrease in the tail span of 2% for the C.1-HN-tail and an increase in the root chord of 2% for the C.2-HN-tail, with the same negative dihedral angle in both of them. In this tail configuration, it is clearly observed from the graphs that the variations in the geometrical parameters are much less noticeable than in the previous tail configuration (HW-tail). During all ranges of the angles of attack, the values of lift, drag and aerodynamic efficiency are not greatly affected by the variation in the geometrical parameters.
Table 10 shows a summary of the aerodynamic parameter variation between all HN-tail configurations. In both tails, there is practically no change in
and
with respect to the reference tail. However,
is deteriorated by around 2% when the tail root chord increases from the reference values. Taking into account these data, the tail span reduction could be the one that generates less drag, with a small improvement on the overall performance of the MAV.
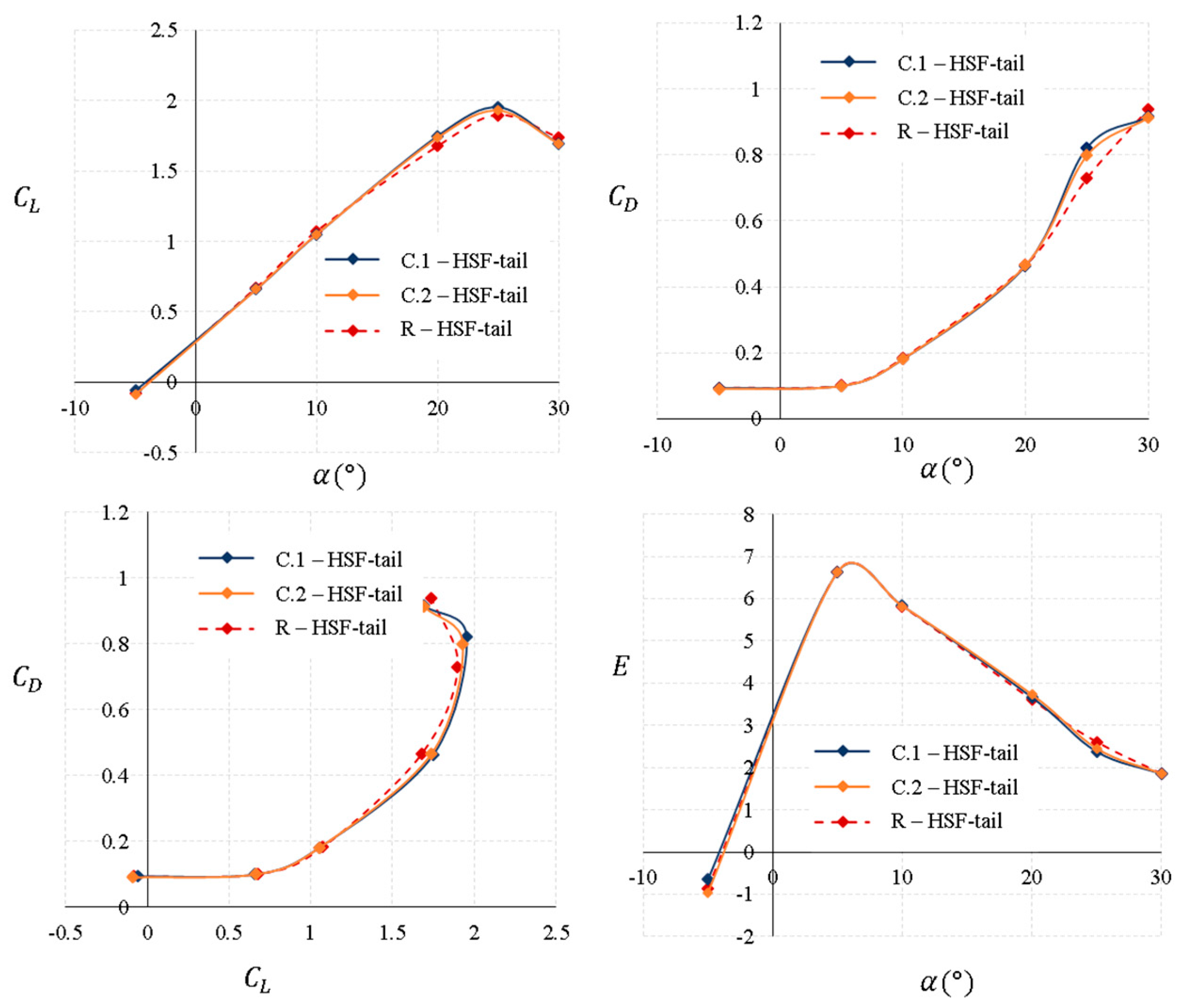
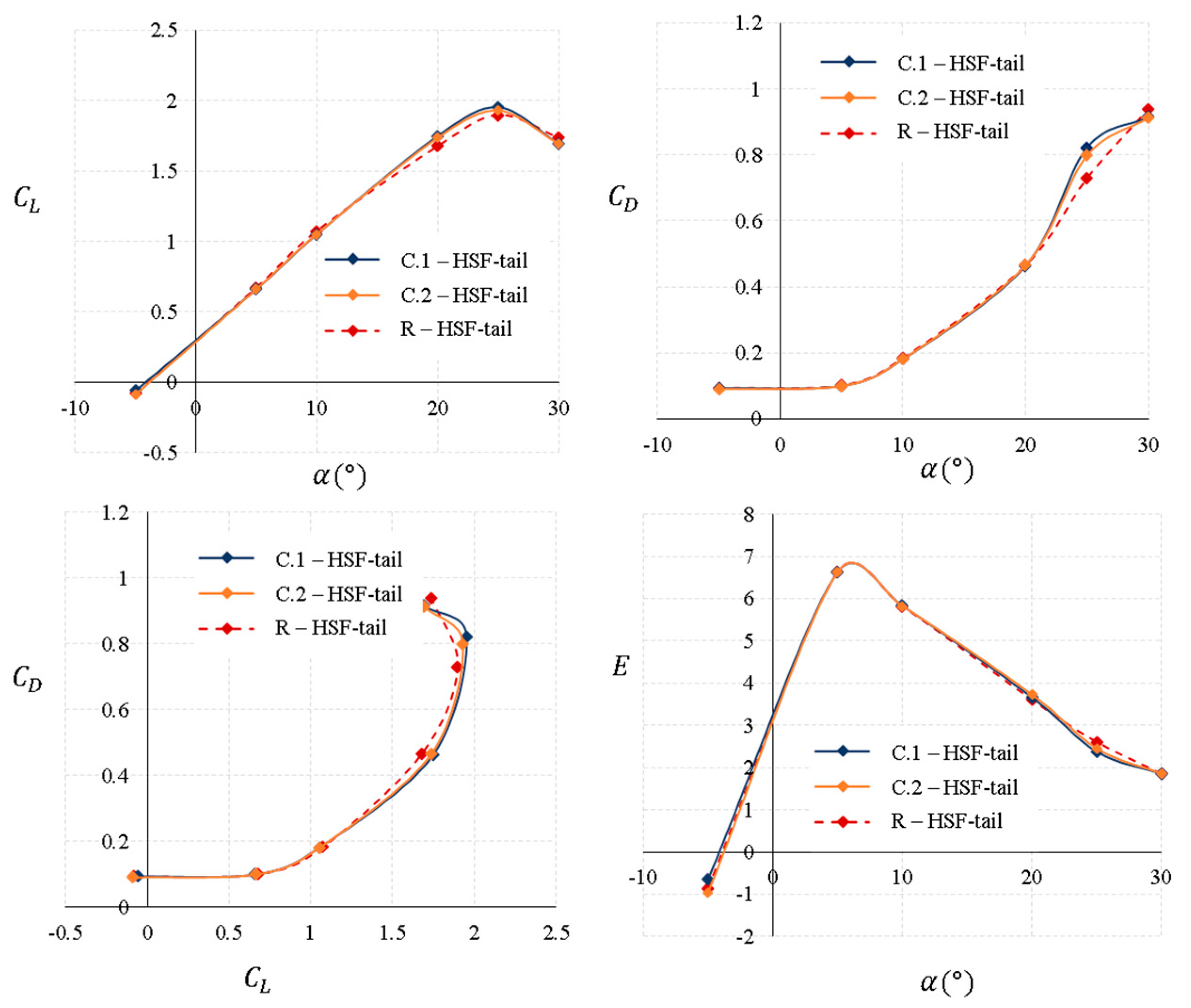
Figure 15 shows the aerodynamic characteristics of the MAV with the HSF-tail. In this tail configuration, only the dihedral angle is varied, being
for the C.1-HSF-tail and
for the C.2-HSF-tail. When the dihedral angle increases, there is an increase in the
, being higher for
, and also there is a decrease in the value of the minimum aerodynamic drag coefficient of up to 1.80% for both tail configurations. The variations in the aerodynamic parameters in this tail configuration are minimal between all of them. The maximum aerodynamic efficiency is practically the same for all tails. It could be concluded that the one that provides a slight increase in the performance of the vehicle will be the C.1-HSF-tail with a dihedral angle of
.
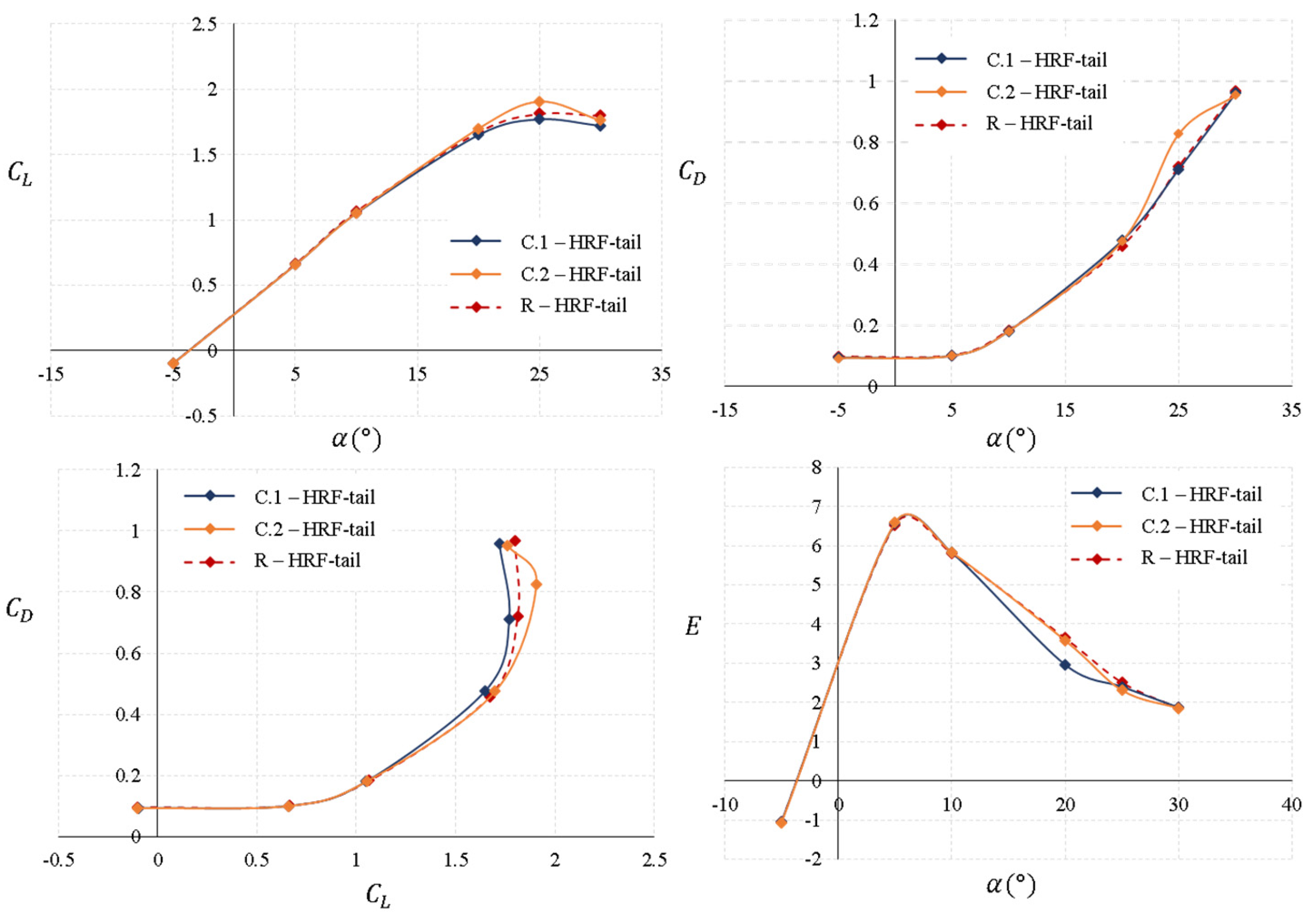
Figure 16 shows the aerodynamic characteristics of the MAV with the HRF-tail. In this case, the two tail configurations show a decrease in the tail span and chord of 2% compared to the reference dimensions, but with a dihedral angle for the C.1-HRF-tail of
and for the C.2-HRF-tail of
. Lift, drag and aerodynamic efficiency values are very similar for all tail configurations for angles of attack below 20°.
In
Table 11, a summary of the aerodynamic characteristics is presented for the HRF-tail. The greatest value for the maximum lift coefficient is obtained for the C.2-HRF-tail configuration, with the most negative dihedral angle being up to 5.11% higher than for the reference tail configuration. From the data in the table, it is observed that a decrease in the span and root chord and negative dihedral angles give lower values of drag during cruise flight, being the lowest value for the C.2-HRF-tail configuration. In both optimal tail configurations, there is no notable variation in the aerodynamic efficiency. To conclude, the tail configuration that will provide the highest performance to the MAV will be the configuration with 2% less tail span and tail chord and a dihedral angle of
(C.2-HRF-tail).
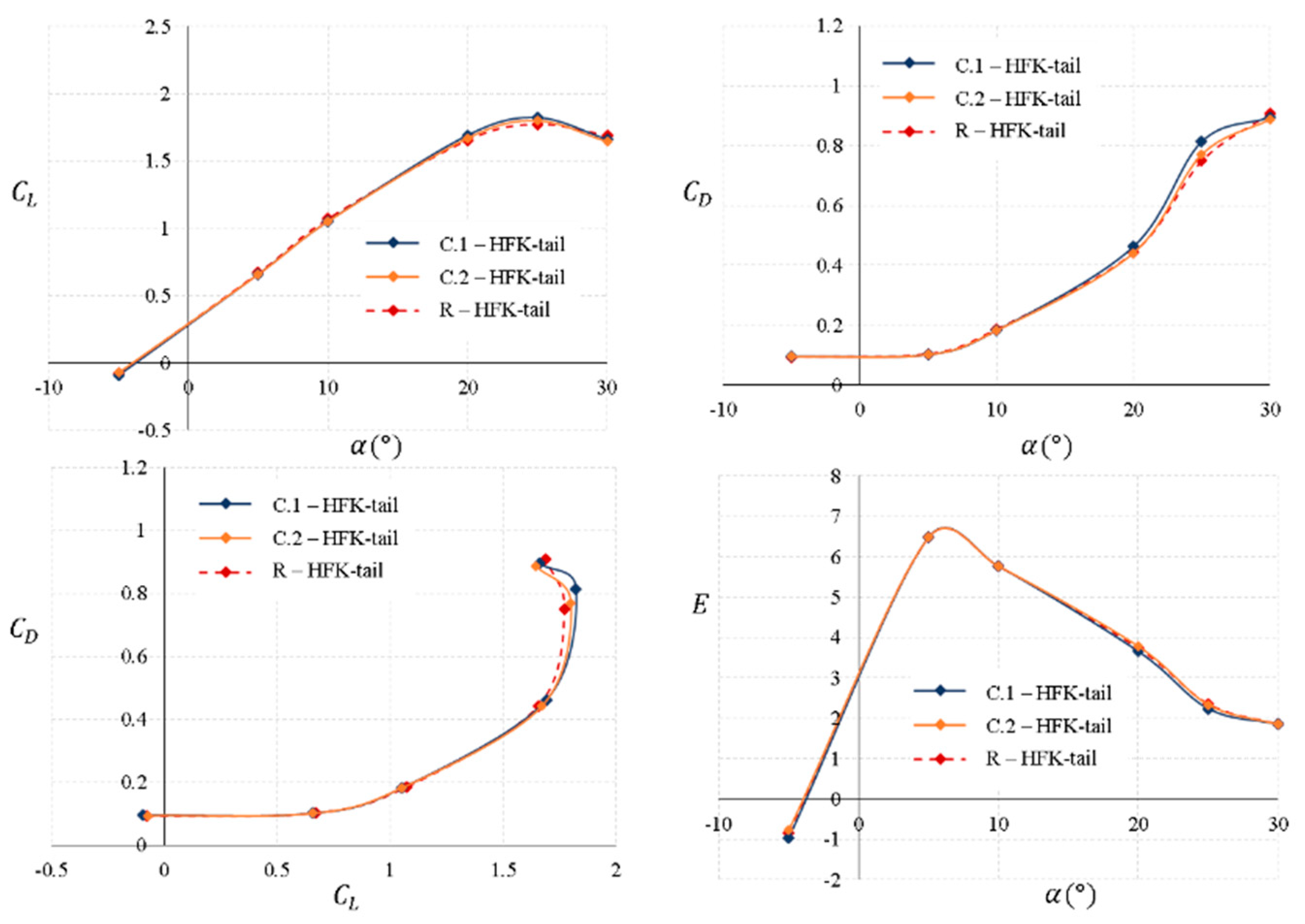
Figure 17 shows the aerodynamic characteristics of the MAV with the HFK-tail. In this case, the tail geometrical parameters vary as in the case of the HSF-tail configuration. Only the dihedral angle is varied, being
for the C.1-HFK-tail and
for the C.2-HFK-tail, while the tail span and chord maintain the same value as in the reference tail configuration. Lift, drag and aerodynamic efficiency values are very similar for all tail configurations until the angle of attack of 20° is reached. By increasing the dihedral angle, the maximum lift coefficient can reach a value slightly above than the reference tail configuration at the angle of 25°.
Table 12 summarizes the variation in the aerodynamic parameters of
,
and
for the HFK-tail. The value of the minimum drag coefficient can be reduced by around 1.54% of that of the reference tail by increasing the dihedral angle. The increase in the dihedral angle leads to a slight increase in
, being more notable for the case of
(C.1-HFK-tail). However, there are no appreciable changes in the maximum aerodynamic efficiency. The tail configuration that could provide a slight improvement in the aerodynamic characteristics would be the configuration of
(C.1-HFK-tail).
After analyzing all the tail configurations, a final selection was made based on the criterion of maximum aerodynamic efficiency (
) in the cruise phase. Therefore, only one configuration of each tail type was chosen as a possible solution to be implemented in the vehicle.
Table 13 shows the five selected tail configurations (with the tail geometrical parameters defined in
Table 8). The squared-fan tail (HSF-tail) provides the highest aerodynamic efficiency value,
= 6.63, followed by the notched-tail (HN-tail), wedge-tail (HW-tail), rounded-fan tail (HRF-tail), and in the last position, the forked-tail (HFK-tail), with around 2.50% less aerodynamic efficiency.
According to these results, the selected tail configuration to improve the aerodynamic efficiency and increase the longitudinal stability of the vehicle would be the squared-fan tail (HSF-tail).


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}









