4.1. The Lava Tubes Mission Design
The analysis of the related work presented in
Section 2.1 suggests a trend toward employing small, expendable, and highly autonomous elements inside the lava tubes. The aim is to create a simple mission to provide the first cartography of the lava tubes. Moreover, the mission should assess radiation levels and temperature excursions in the skylights, twilight zone, and underground tubes. The mission would then lay the basis for following and more complex missions, providing in-depth knowledge about the lava tube configuration, geology, and sustainability for a human base. Based on this reasoning and the previously analyzed state of the art, the mission statement has been defined as:
A robotic exploration mission is envisioned to map the zones in the proximity of the skylight, identify the potential of scientific targets to be further investigated, and assess the feasibility and safety of human presence inside lunar lava tubes.
The system would probably provide a series of images to be reconstructed on Earth while mapping the lava tubes. This analysis would help scientists understand the appearances and peculiarities of the lava tubes. In addition, it would provide the users with valuable data for assessing the overall stability of those underground tunnels. Moreover, indicating the radiation level and temperature inside the skylight and the lava tubes would provide information to prepare a human sortie mission inside the lava tubes as envisioned in Ref. [
3].
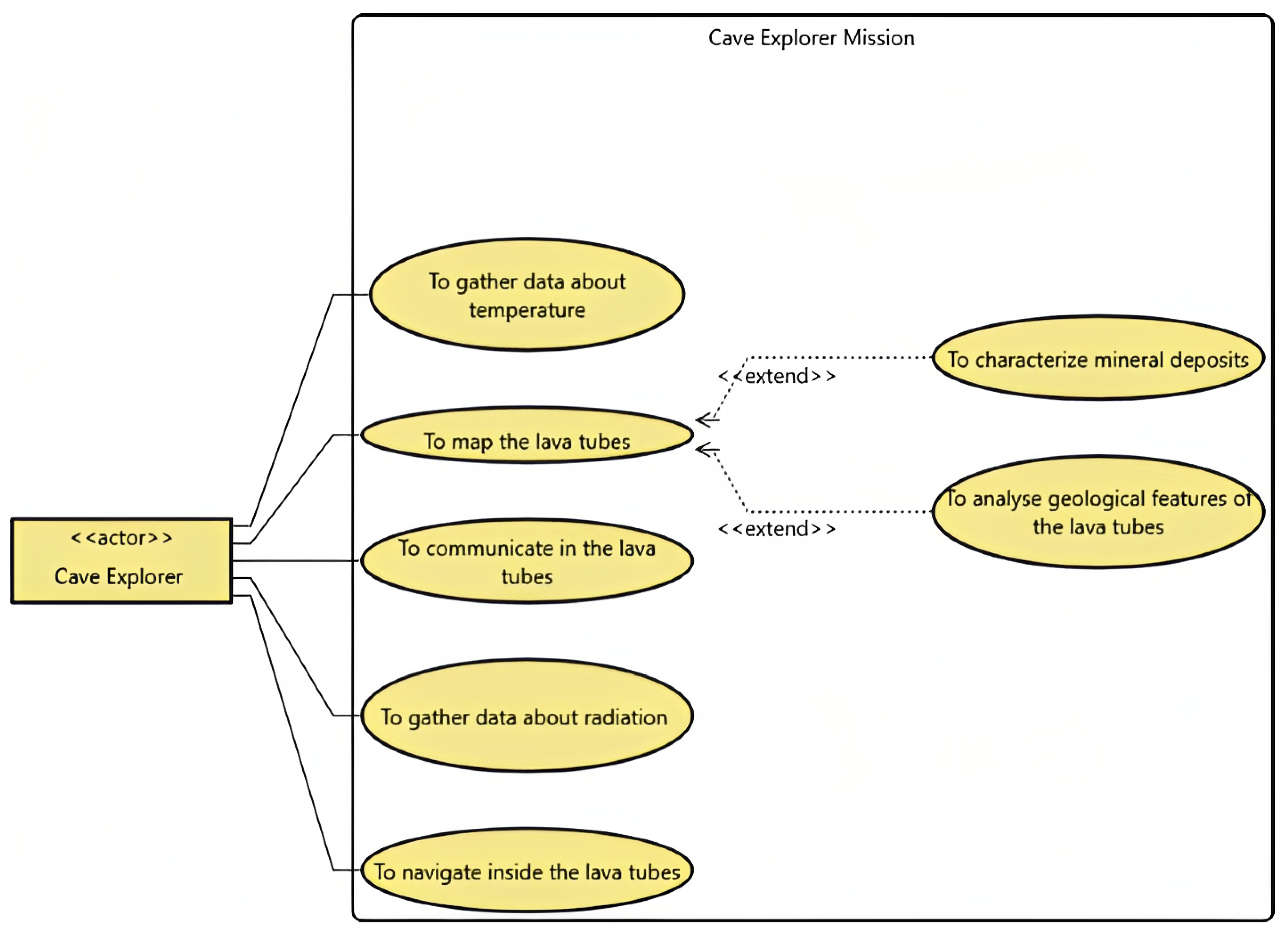
Beyond the pure scientific targets, the lava tubes’ exploration mission can be seen as a test bed for new technologies linked to mobility systems and autonomy architecture. Although there is no need for the exploration system to decide its goals, such as a level E4 autonomy. It needs to navigate autonomously inside the tube at a given depth. Hence, a level E3 with high-level goals provided by spacecraft operators on Earth, may suffice. However, a relay system from the surface will be necessary to deliver the signal to the underground tunnels. The addressed reasoning is the basis for the mission objectives formulation shown in
Figure 5.
A use case diagram is the viewpoint used to visualize them:
In
Figure 5, the use cases are the mission objectives. The primary mission objectives are directly linked to the actors, while the secondary mission objectives are linked to the primary ones with an include or extend branch.
The subject is the entity that performs the use cases [
52]. The subject is generically addressed as a system of systems for the lava tube mission.
Use cases are usually phrased as a verb followed by a name. However, that definition has been relaxed in Ref. [
42], where use cases were used to frame mission objectives. Hence, following the same methodology, the use case phrasing contains more information than just the atomic form of the verb and noun. The mission objectives are defined as use cases in the MBSE model, following the definition of Ref. [
52]: a use case is a service, a behavior, that your system will perform. The aim is to include not only the mission requirements in the MBSE model but also the traceability of the mission objectives [
42]. The mission statement and objectives are the driving entities for the overall design. When the mission objectives are included in the model, it is possible to visualize the direct link between mission objectives and stakeholders, highlighting which mission objective answers which of the stakeholders’ needs. In addition, the analysis in Ref. [
42] links the use cases to a prioritization score that would be useful during the trade-off analysis to vote on the best mission architecture based on the required functionalities and operational capabilities. Hence, not only the use cases but also their related attributes are considered in the MBSE model. The use of include branches in use cases to capture primary and secondary requirements has been formulated in Ref. [
42]. On the other hand, the extend branch is used to write down mission objectives that may be of interest but are not directly enforced by the stakeholders. An extend relationship represents an optional use case that may be enforced only if some criteria are met [
52].
The selected actors in the use case in
Figure 5 are the identified stakeholders with a direct interest in the mission: (i) the scientific community, (ii) space agencies. The stakeholders’ analysis is quite general. However, the lava tubes’ exploration does not look to be part of commercial-related efforts yet. Even if some of the research centres that participated in Ref. [
18] are partners with some companies, the overall mission looks more toward the scientific community’s interest than the one of the aerospace industry. Leveraging the MBSE model, all the possible mission objectives can be formulated as use cases. If some of them do not make the cut to the selected baseline mission, a comment can be included to explain the rationale for the choice in the MBSE model. The initially discarded use cases can be a helpful starting point to extend the analysed mission in future iterations or versions.
From a scientific point of view, it would be interesting to venture up to 200/250 m [
18] inside the lava tubes to verify the models and conclusions of studies such as Refs. [
19,
53]. The studies in Refs. [
25,
54] estimate that a small exploration system can communicate for a range of up to 80 m with a communication duration equal to 20 min for each communication relay. Therefore, the exploration system can do multiple rounds of trips to explore inside the lava tube and return to the skylight for communication purposes at given time intervals. Alternatively, a chain of relay systems can be used to hop the message back toward the skylight. The analysis of Ref. [
54] is quite insightful on the set of possible architectures for swarm exploration. However, for fast prototyping of an exploration system, it is always good to look at the worst-case scenario where the system cannot recharge if not in the skylight and has to complete a round trip of 500 m in the dark of the tunnels. This evaluation can rely on the first-order approximation developed in Ref. [
2]. Following Ref. [
2], the exploration energy needed by a rover-like system can be expressed as in Equation (
8).
where:
is the soil resistance, and it is usually set at 0.15 for a first rapid assessment [
2].
represents how much energy is used for mobility. In Ref. [
2], a value of 30% is suggested.
m is the mass of the rover.
d is the traversed distance.
g is the celestial body gravity.
v is the rover velocity.
D is the guidance duty cycle. It represents how much time the system spends driving versus the time spent on robotic operations.
P is the total power available to the system.
The first part of Equation (
8) defines how much mechanical energy the system employs to move on flat terrain. As the wheeled mobility system will be used to move on basaltic terrain, this metric should approximate its expected performance well. On the other hand, the second part of Equation (
8) refers to the energy employed for the payload and to plan the mission. Leveraging the formulation in Equation (
8), it is possible to relate the distance to be traveled with the battery mass and the power consumption of a system. The battery mass of the systems discussed in
Section 2.1 sized for a similar mission ranges from 12% of the baseline configuration in Ref. [
26] up to 16% of the total system mass in Ref. [
22]. Imposing 16% as the upper limit of battery mass over total system mass, it is possible to estimate the expected system mass for a given amount of consumed power, the distance covered, and the driving duty cycle, as shown in
Figure 6. The assessment would not be precise. However, it can provide the order of magnitude expected for a lava tube explorer. Most of the duty cycle points are layered on top of each other. The graphs in
Figure 6 highlight with colors the minimum duty cycle that can be sustained for a given configuration in terms of system mass, battery mass, and power consumption for a given distance to be covered.
In the estimation of
Figure 6, the exploration system velocity is assumed to be 0.10 m/s. In comparison with other planetary rovers, this velocity is quite elevated. For example, the Yutu rover had a velocity of around 5.5 cm/s [
55], and Curiosity had a similar maximum velocity of 5 cm/s [
55], while Spirit and Opportunity were moving at 1 cm/s [
55]. However, new micro-rovers and small robotic systems trend toward incrementing this velocity up to 0.25 m/s. On the other hand, the power consumption varies from the 20 W of the SphereX [
26] to the 300 W of the Daedalus [
22]. The duty cycle indicates the proportion of the traverse time that the rover effectively drives against the percentage of time used for payload operations or navigation and guidance assessments [
2]. Hence, a higher duty cycle indicates a system that spends more energy on driving than on planning or using its payload, covering more distance with less battery consumption. The primary assumption of the model in Equation (
8) is that the non-driving energy (plan computation, path estimation, sensor fusion, localization, data collection …) accounts for far more energy than simply driving from point to point. The effective energy required for mobility depends on rover mass, distance covered, and terrain type. On the other hand, the energy for sensing, computing, and communicating depends on the total mission time that the system is not spending driving. Moreover, some lower-level robotics functionalities (like reactive obstacle avoidance) run even when the system drives, increasing the overall robotics power consumption. Looking at the results in
Figure 6, a system with a mass of 25 kg and a power consumption of 100 W should at least spend 30% of its energy driving around to cover the 500 m distance. The most likely duty cycle to be adopted during navigation would be around 40% to 60%. It depends on the number of obstacles the exploration system encounters, its task and motion planning algorithms, and the payload activities to be carried out.
Beyond the mission objectives and the estimation of likely mass and power consumption, defining the time the system should operate is essential. To not have to equip the system with heavy thermal protection, it is assumed that the maximum length of this first exploratory mission would last around one lunar day, as in Ref. [
18]. All this numerical information can be included in the MBSE model and will provide high-level constraints for the cave explorer’s final design box.
Following the design process laid out in
Section 3.1, the focus shifts toward defining the main mission elements and their operations, leveraging functional analysis and ConOps. Similarly to Refs. [
3,
21], this study identifies four elements needed to accomplish the mission:
A skylight explorer would: (i) relay data from the lava tubes outside, (ii) recharge the exploration systems, (iii) evaluate the temperature and radiation environment inside the skylight. It may deliver some payload inside the lava tubes as well. However, for the architecture defined in this study, the cave explorer can access the lava tubes autonomously.
A cave explorer would venture inside the lava tubes and gather information on the morphology and geometrical structure of the lava tubes as well as their habitability potential, as detailed in the use case in
Figure 7.
A rover drives the other elements in the proximity of the skylight. It would probably be equipped with ground-penetrating radar to study the terrain around the lava tubes.
A lunar lander carries the other elements from a low lunar orbit to the surface. It can be used as a relay hub for communications.
Figure 8 and
Figure 9 show the mission concept as DRM (Design Reference Mission).
Figure 8 highlights the access mechanism of the cave explorer in the lava tubes. While
Figure 9 highlights the use of the skylight explorer as a relay element for the mission, delivering data back to the rover through a cable [
18].
After defining the overall architecture that frames the cave explorer mission, the aim of this paper is to provide an initial design of the system and its mobility capabilities.
4.2. Cave Explorer Conceptual Design and Preliminary Sizing Assessment
Following the subsystem classification of Ref. [
48], the cave explorer is composed of seven subsystems ((i) structure and mechanism subsystem; (ii) mobility subsystem; (iii) power subsystem; (iv) telemetry, tracking, and command subsystem; (v) thermal subsystem; (vi) guidance, navigation, and control subsystem; (vii) command and data handling subsystem) plus the payload.
The most critical trade-off to be made during the initial definition of the cave explorer focuses on choosing its mobility subsystem. The lava tubes are formed by volcanic activity. Therefore, the terrain inside the lava tubes, past the skylight, is expected to be relatively flat with few obstacles [
16]. The estimated maximum obstacle height is around 100 mm based on the analysis in Ref. [
22]. For this type of environment, a wheeled or rolling system would provide the best performance on flat terrain, consuming less mobility-related power. However, in proximity to the skylight, the terrain is expected to be rough and hardly traversable with simple wheels. Moreover, there may be some areas inside the lava tubes where the ceiling has partially collapsed. Therefore, the exploration system should be able to move around or over these areas.
To overcome more significant obstacles, mechanical hopping [
3] and thrust-base hopping [
24,
25] can be considered. However, as analyzed in Refs. [
24,
25], hopping bots using mechanical systems may struggle in the lava tubes. Mechanical hopping complicates asset determination for landing gently at a safe point, especially in a rugged environment. Flying allows the system to take off and land gently, minimizing impact forces. However, a flying bot would use propellant, contaminating the soil touched by the plume. To lower the contamination risk, Ref. [
56] suggests the use of cold-gas-based propulsion using compressed nitrogen with a specific impulse around 60 s. Another more volume-efficient solution is electrolysis propulsion, as used in Ref. [
26]. It permits the storage of
and
in solid form [
26], saving space, and the required amount of fuel and oxidizer can be generated on demand [
57]. This monopropellant has a specific impulse,
of around 140 s [
58]. This type of propulsion can be quite volume-effective, as 7.8 kg of propellant may be stored in less than 10 L of volume, as studied in Ref. [
59]. Regarding the level of Isp, Ref. [
59] claims a theoretical Isp well above 300 s. A study from Ref. [
60] proposes a new type of hybrid legged-wheel design with good obstacle traversability similar to legged systems and low power consumption on flat terrain such as wheeled systems. Moreover, this type of mobility subsystem should be able to climb a plateau with a height of 25 cm [
60]. It may be a versatile solution to be investigated for the lava tubes’ mission. However, it does not allow the cave explorer to directly access the lava tubes without external help.
Following this reasoning, the authors performed a trade-off to define the mobility subsystem design for the cave explorer. The figures of merit (FOM) partially derive from Ref. [
61]. Ref. [
61] is an extensive review that compares different types of mobility based on metrics such as (i) speed, (ii) obstacle traverse capability, (iii) slope climb, (iv) soil sinkage, (v) mobility subsystem simplicity, (vi) energy consumption, (vii) payload mass, (viii) soil-mobility subsystem interaction, (ix) technological readiness level (TRL). These FOM are compared on a scale from 1 to 5 [
61]. The qualitative assessments liked the different scores: (i) very low for 1, (ii) low for 2, (iii) medium for 3, (iv) high for 4, (v) very high for 5. The only FOM that reverses this equivalence is energy consumption: the more energy-efficient a system is, the higher the score will be. A similar scale is used in the trade-off presented in this article.
This research does not consider soil sinkage (related to the mobility-subsystem weight), soil-mobility subsystem interaction, or TRL as FOM because (i) the envisioned exploration system is light-weight; (ii) the system interaction metric looks at the effect of planetary soil on long-term missions; and (iii) the study is more focused on innovation than on existing technologies. Instead, this study considers the redundancy of the mobile element, the localization accuracy, the design innovation, and the mobility system’s controllability. The mobile element redundancy relates to the possibility of accomplishing the mission, even partially, due to some faults in the mobility subsystem. Wheeled rovers can function even with failures in one or two wheels, giving them a score equal to 4; hybrid mobility subsystems should be more resilient to failure, gaining a score equal to 5. On the other hand, a system with good localization accuracy and position estimation can travel faster and more efficiently inside the lava tubes. For example, given the same set of sensors, a ballistic hopper may have less precise localization (score 1) than a wheeled rover (score 3). The FOM assessing the innovation has been added as exploring new concepts for the lava tubes’ exploration is interesting. Exploring the goodness of new solutions is essential to extending the knowledge base and developing a feasible exploration system for exploring planetary caves. Therefore, more innovative solutions have a higher score for this FOM. The controllability metric pinpoints how easy or difficult it is to control a system’s dynamics based on its mobility subsystem. For example, a spring-based hopper can control its overall trajectory and landing point less than a propelled one.
The employed trade-off methodology is presented in Ref. [
42], where the weights for the different figures of merit are graded considering the mission objectives and the associated stakeholder rating.
Table 1 shows the scale associated with the rating.
Table 2 and
Table 3 show the metrics and type of mobility system considered in the trade-off study and the grading values derived from the influence matrix in
Table 1.
The metrics maximum speed capability has a null affection level: more than the speed, the battery consumption per covered distance indicates the goodness of the chosen configuration to explore the depth of the lava tubes. The best mobility configuration considering battery consumption is a simple-wheeled system. However, the configuration is lacking from the point of view of obstacle traversability, where hopping systems score better. Considering the affection level and the metrics’ grading, the trade-off results are shown in
Table 4 and
Table 5. The identified winning solution was a hybrid wheeled and hopping solution. The wheels would give an advantage in battery consumption on the flat basaltic terrain inside the lave tubes. At the same time, the controlled propelled hop would provide remarkable obstacle traversability capabilities on the skylight terrain. Interestingly, Ref. [
62] addresses in its conclusions the exploration of possible designs of a hybrid hopping rover as an interesting outcome of its comprehensive trade-space exploration of mobility subsystems of planetary exploration systems.
The equipment of each of these subsystems would not deviate much from that of a typical micro rover similar to the one described in Ref. [
63], with passive thermal protection. The command and data handling subsystem and the guidance, navigation, and control subsystem are the subsystems that mostly change when a higher level of autonomy is introduced. The command and data handling subsystem needs more computational power. It should be equipped with a secondary computation unit entirely dedicated to computing the actions to be executed for the GNC to safely move the system in the lava tubes. Moreover, the communication constraints will require providing the command and data handling subsystem with a module dedicated to FDIR (Failure Detection Identification and Recovery) to be able to react to unexpected failures without human support. The GNC subsystem is going to be affected by the choice of the mobility subsystem. As mobility is hybrid, the GNC subsystem would have a module dedicated to controlling the cave explorer’s trajectory during the propelled arcs. It will then encompass more conventional motion planning, navigation, and control of the wheels when moving as a conventional rover. Due to the required level of autonomy, the other subsystems will gain more sensors to enable autonomous decision-making by the command and data handling subsystem.
Figure 10 presents an artistic view of the hopper.
The designed cave explorer weighs around 15 kg, with 2.5 kg of available payload, around 4 kg of propellant mass, and an expected power consumption of 100 W (Equation (
9)) [
1]. The
is evaluated from the estimation of
Figure 6, considering a 100 W power consumption, 40% duty cycle, and a power density of 120 Wh/kg for a Lithium-Ion Battery [
64]. The system should have a velocity of 0.2–0.25 m/s and reach at least 200 m inside the lava tube. Moreover, the minimum sensor suite to identify the state of the rover during the hopping phase consists of an IMU and an altimeter. However, a stereo camera and a LIDAR are necessary to navigate during the rover phase. The propulsion system (
), without propellant, should weigh around 1 kg, of which 650 g are for the thruster. This value aligns with the specifics of different types of propulsion in Ref. [
65]. It is slightly more than the mass allocated in Ref. [
26], providing a bit of margin for future iterations. The
encompasses all the other components such as sensors, on-board computer(s), connectors, and wheels. it is worth noticing that some sensors, such as cameras, can be used both as payload and for navigation purposes, helping optimize the system’s mass and volume. The
is evaluated for a limit situation where the system needs to hop almost continuously to avoid obstacles, as analyzed in Ref. [
10].
The mass estimation loop is an iterative process that changes the payload mass fraction until convergence, as described in Ref. [
10]. Different parametric formulae are used to estimate the likely-to-be mass of the propellant or the different subsystems. The initial guesses from which the computation starts are: (i) a thrust-over-weight ratio (
) equal to 1.3, (ii) a propellant Isp of 300 s similar to the design value proposed in Ref. [
59] and Ref. [
26], (iii) a hop distance of 3 m. From these initial guesses, a simplified formula based on the definition of the Isp as
is used to evaluate the percentage of needed propellant per hop as shown in Equation (
10).
where: (i)
is the thrust over weight ratio,
[m/s
] is the Moon gravity acceleration,
[m/s
] is the Earth gravity acceleration,
[s] is the time of the propulsed hop, Isp [s] is the propellant specific impulse. In this initial calculation,
is assumed to be equal to 2.4 s for the powered ascent. The full mathematical background of this evaluation can be found in Ref. [
10]. After evaluating the usual percentage of mass used at each hope, it is possible to evaluate the mass of propellant as in Equation (
11).
where: (i)
is the total system mass iterated in the parametric design; (ii)
is the percentage of propellant mass consumed at each hop; (iii) D is the distance to be covered, set to 500 in this worst case scenario, (iv)
is the hop distance. With this calculation, the propellant mass is estimated at around 3.2 kg. However, during initial assessments, it is always advisable to be conservative with the estimations, as in the case of
. Hence, a 20% margin is applied to this initial estimation. The objective of a more detailed design would be to engineer a more reactive system with a more balanced energy subdivision between mobility and robotic energy. An approach similar to Ref. [
26] would be the next logical step to optimize the mass and dimensions of the cave explorer.
The required thrust level for 15 kg would be a minimum of 32 N. From the estimation of Ref. [
26], it seems a feasible value. Effectively, in Ref. [
26], the authors analyzed different configurations of the SphereX for a lunar and Martian scenario, imposing the thrust level to be two times the system weight.
A parallel with micro-rovers on Earth is used for the first estimation of the hopper’s likely dimensions. The wheel diameter is set to be 13 cm, as in Refs. [
63,
66]. The rocker boogie will have a height of around 20 cm (from the wheel center to the body attachment) and a width of 40 cm (between the centers of the wheels). The width is evaluated using a proportion for lunar landers. Typically, the footpads of a lunar lander are distanced from each other by around two times the lander’s body diameter. The height should allow for a minimum clearance from the ground to protect the thruster. The minimum ground clearance for a lander is evaluated as
. In our case, it would equal 4 cm. The exposed length of the thruster will be around 9 cm. In contrast, the overall length of the thruster system is around 18 cm. The points of attachment of the thruster to the main structure should be positioned on the bulkhead of the main body chassis and should coincide with the attacks for the rocker boogie. This solution can be a good trade-off between decreasing the structural mass and distributing the mechanical loads of the structure.
The main body dimensions are preliminary assessed by looking at the volume of the rover in Ref. [
66]. The hopper would include equipment with a similar volume to the rover used to test its ground mobility operations in Ref. [
66]. From Ref. [
59], it is estimated that an electrolysis propulsion system of 7.8 kg can be stored in less than 0.01 m
. Trying to be conservative with the estimation, as the design is still in its early stages, the propulsion subsystem will use around 0.01 m
of the internal space of the main body. The volume of the rover equipment in Ref. [
66] plus the propulsion system would be around 0.03 m
. Starting from this value, it is possible to preliminary set the width, length, and height of the system’s main body (excluding the rocker boogie and the exposed thruster length of 9 cm) as in Equation (
12). The total system height will be around 15 cm higher than the body height.
This quick estimation will be refined during the following design phases. However, it already provides some valuable starting values for the GNC assessment.
When the hopper uses its mobility system, it acts similarly to a conventional rover. No particular innovation is introduced with respect to standard motion planning such as the one analyzed in Refs. [
7,
67]. However, to prove the feasibility of the design, the focus should shift toward assessing the possible hopping trajectories and the system’s control capabilities to follow them. As this is a preliminary design, it is not unlikely that the hopper’s mass will probably change and more likely increment. The following part of this study analyzes how the control capabilities hold while varying the system mass of about
kg.
4.3. Trajectory Control and Its Impact on the Design
The results of the design of the nominal controller based on the PID approach are discussed in this session, together with the nominal results of the MRAC. Following this initial assessment, the results of the adaptive controller applied to the system in the presence of varying design parameters are analyzed.
Figure 11 shows the results for a nominal case. In the nominal case, the controllers are tuned based on a small perturbation model. The attitude is controlled by a PID controller with the gains
,
and
. The cascade PID to control the altitude and the velocity is constituted of two proportional gains
,
and
, which respectively weight the error on the altitude and the error on the velocity. They provide as output the necessary thrust to follow the trajectory. The gains, which are not indicated, are selected to assume a zero value.
Figure 12 shows an analysis of the performance of the adaptive controller when the design parameters are changed during the mission design process. In this figure, the results are reported when the mass can vary between
kg and
kg while maintaining the same thrust level for the hopper. Note that the interval of variation is not symmetrical because the performance in terms of time of flight starts to decrease when the mass is increased by about 4 kg; on the contrary, the time of flight performance of the PID starts to get worse when the mass is increased by about
kg; this implies that a different thrust solution is required in those cases. The jump height performance deteriorates already when the mass is increased only by
kg, but the MRAC controller can always jump higher by about 200 mm on average than the baseline controller. The designer can understand that they can maintain a portion of the performance without altering the control architecture, simply by increasing the PID gain with the multiplicative factor provided by the MRAC. Nevertheless, the MRAC approach can adapt the gain of the nominal PID controlled to obtain better performances in terms of jump height and time of flight in cases of variation of design parameters.
Naturally, if the thrust
T is brought from 31 N up to 40 N in the nominal working conditions, the jump is possible up to a total weight of 20 kg without exceeding the nominal requirements on the Thrust/Weight ratio (see
Figure 13). Thanks to the enhanced thrust capabilities, the time of flight performances remain consistent across the entire range of explored mass increments. The performance in terms of nominal height has been enhanced, and the MRAC offers a similar level of improvement as the previous thruster. There is no significant advantage if the adaptive control is put on the attitude control even in the presence of variation in the dimensions of the vehicle since the PID provides a good reference following within the working range of the selected reaction wheels.
As can be clearly seen in the results, the inclusion of control in the sizing phase contributes to making the design more effective. In fact, the adaptive control scheme is based on a classical PID control and adapts the multiplicative gain of the PID to improve the performance when the mass and the inertia are varied. The use of this control scheme (see
Figure 4) also has the advantage of being based on the PID technique, which can be easily space-certified. Moreover, it provides the designed system with a quick perception of whether the actuation system can still sustain the payload and how fast the performances can decide if the mass is increased or if the dimensions are changed during the design process. For the search of completeness in
Figure 14 is also reported the behavior of the PID controller on the pitch angle when the dimensions, and consequently the inertial, are varied. The PID can maintain the performances. Therefore, an adaptive controller is not necessary.



 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}













