Spaces in Spatial Science and Urban Applications—State of the Art Review

 ,
,  ,
,  ,
,  ,
,  , and
, and
Abstract
1. Introduction
2. Definition and Classification
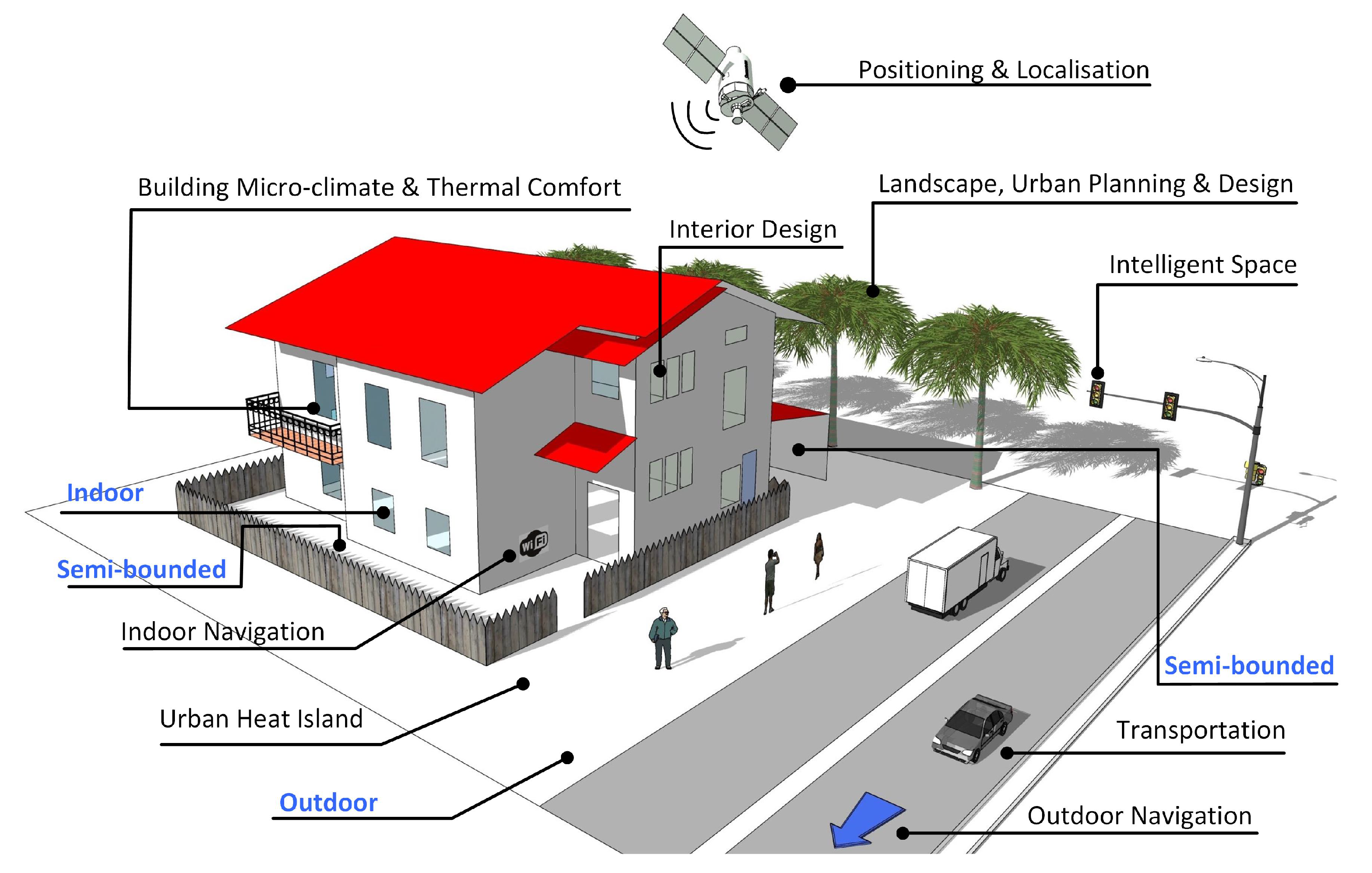
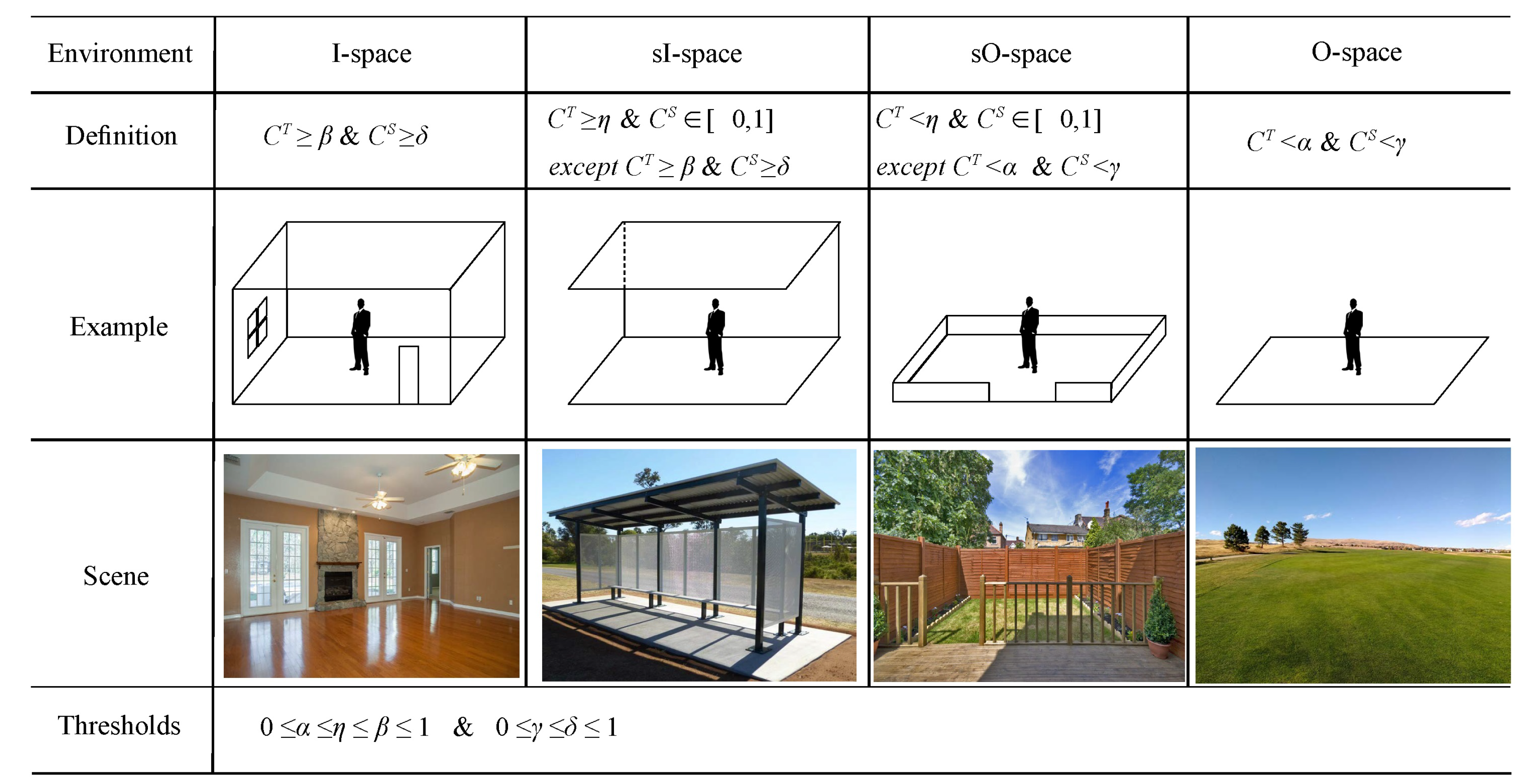
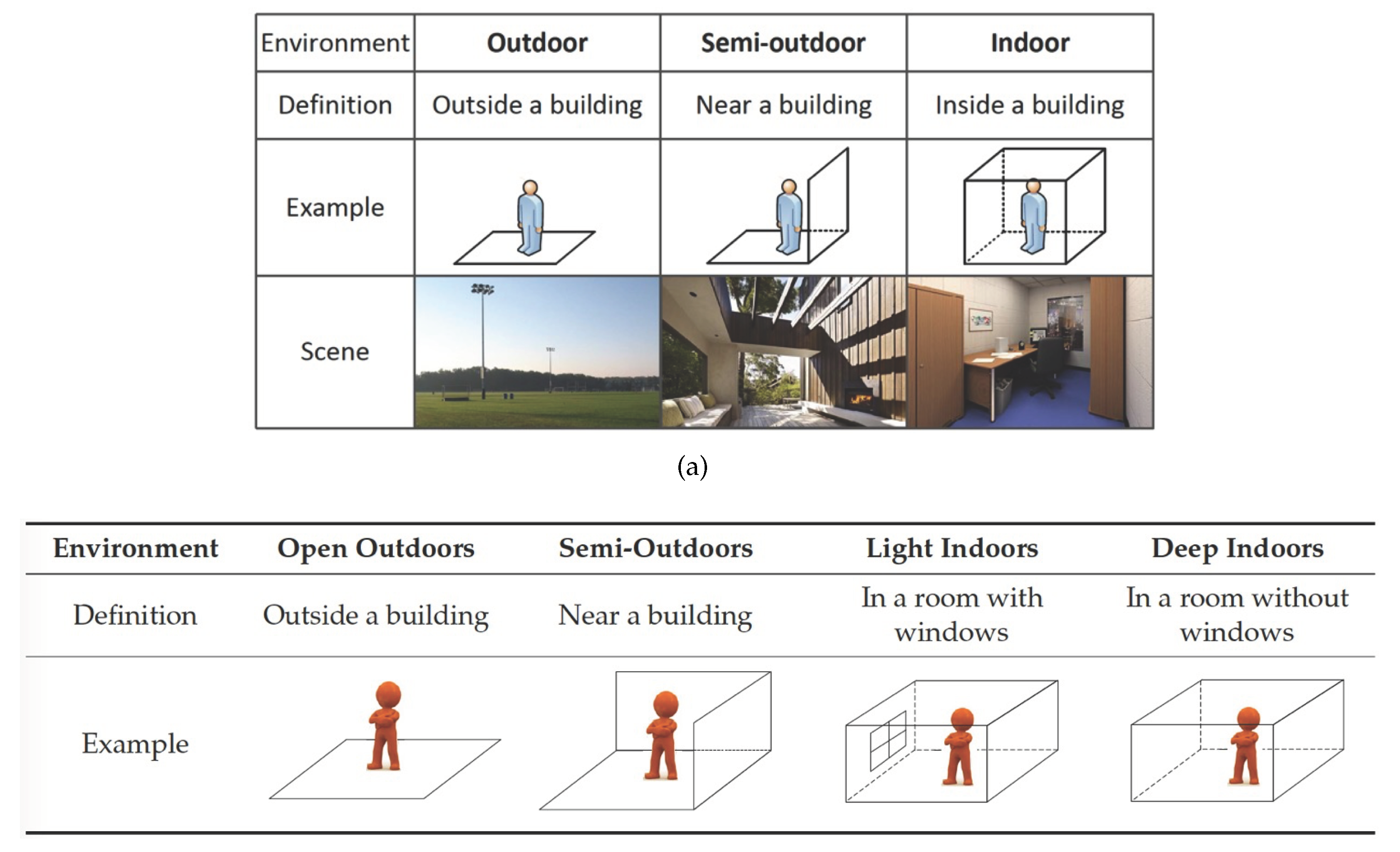
2.1. Spaces in Navigation
2.2. Spaces in Positioning and Localization
2.3. Spaces in Building Micro-climate and Thermal Comfort
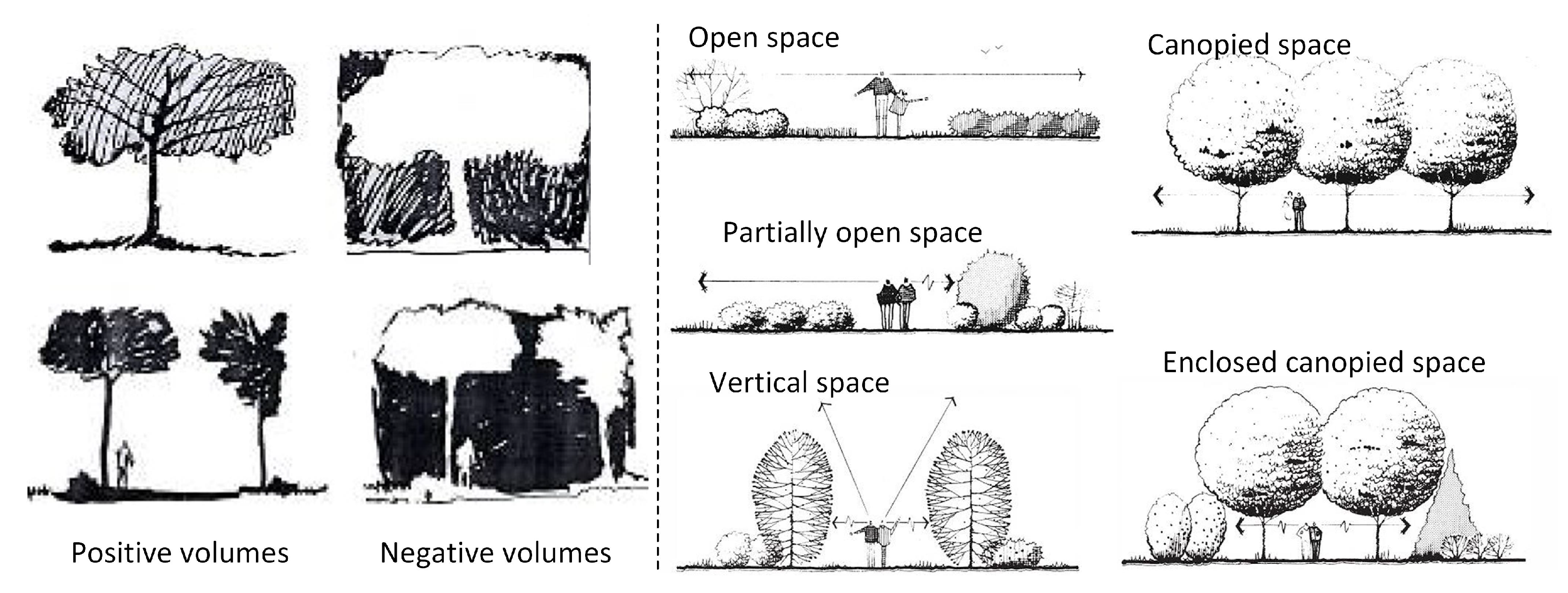
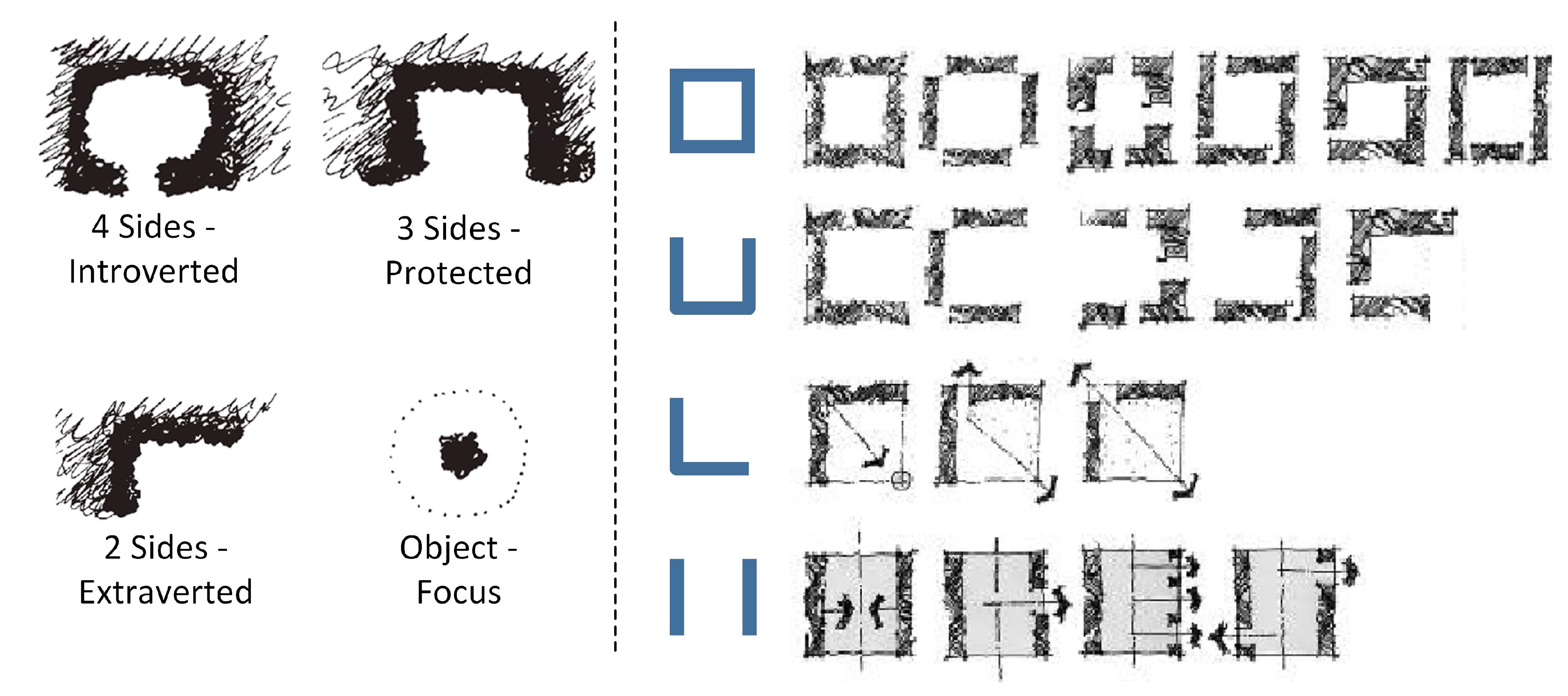
2.4. Spaces in Landscape, Urban Planning and Design
2.5. Spaces in Urban Heat Island
2.6. Interior Design and Planning
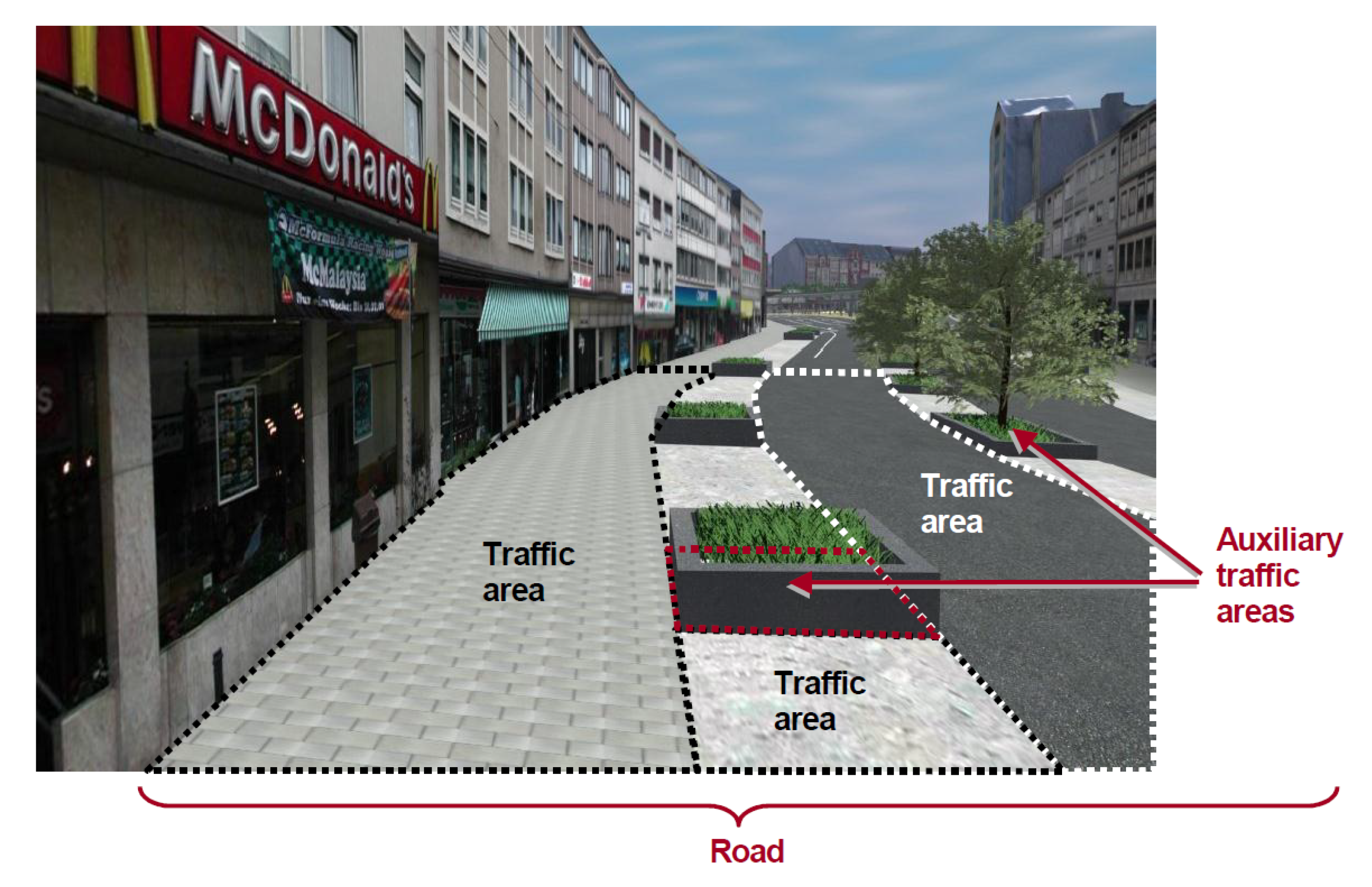
2.7. Spaces in Transportation
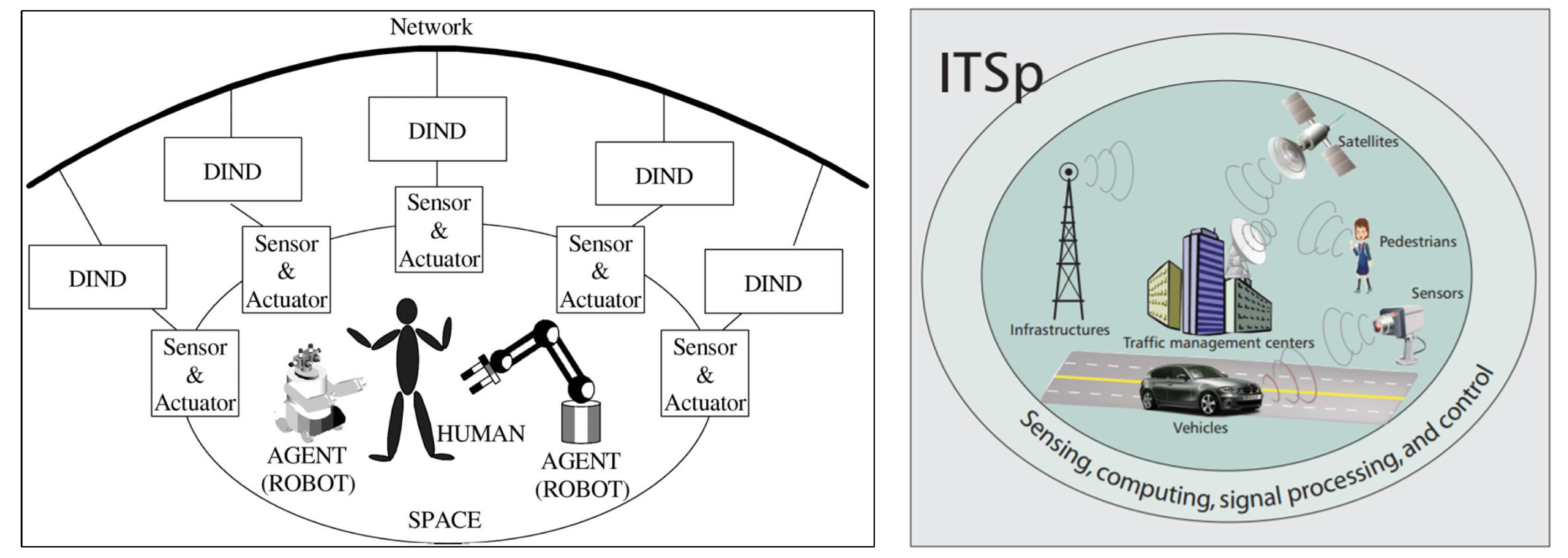
2.8. Intelligent Space
3. Spaces Representation
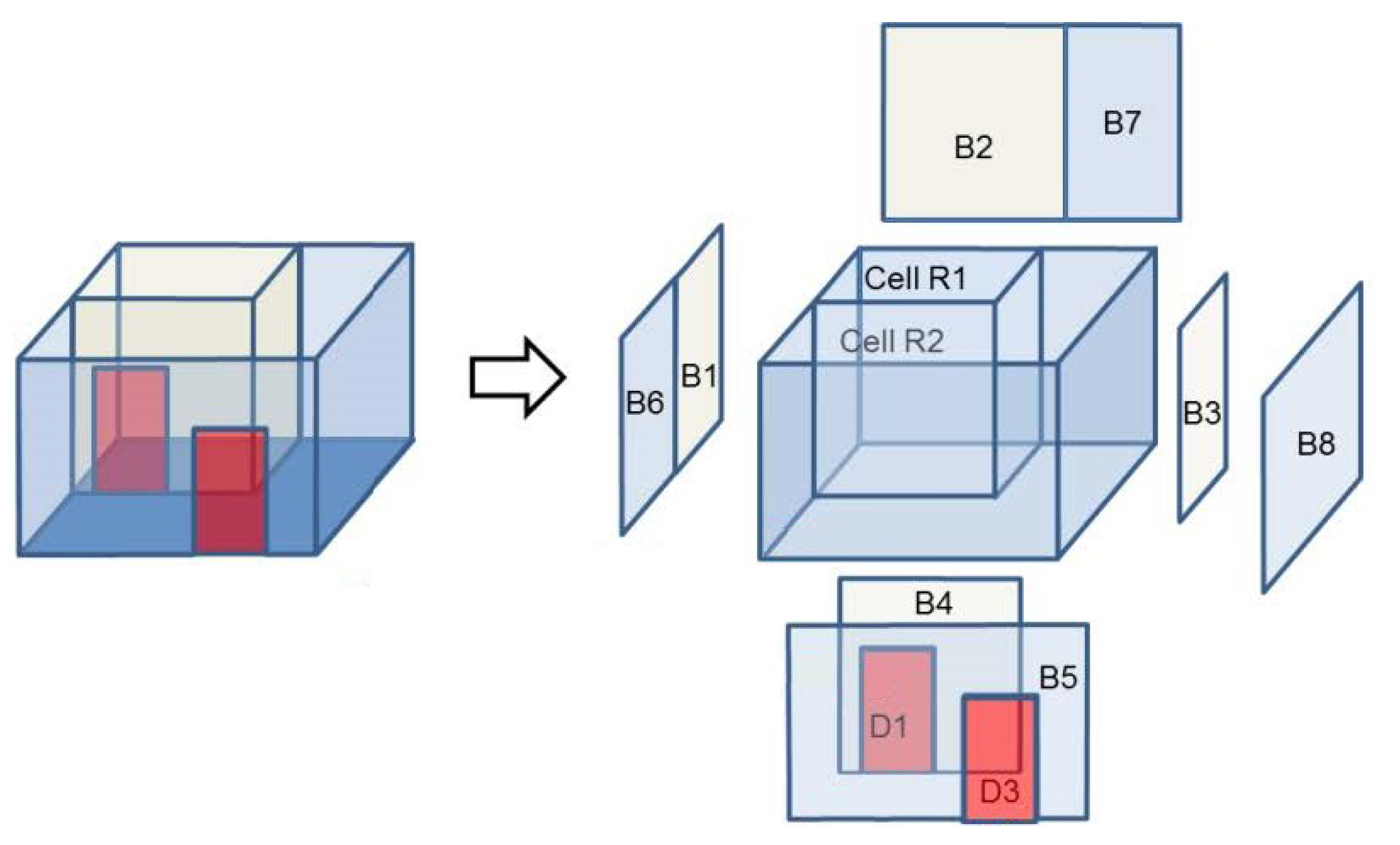
3.1. Examples of Space Geometric Representations
3.2. Spaces Maintained in International Standards
3.3. Discussion
4. Similarities, Overlaps and Differences of Spaces in Different Fields
4.1. Overview of All Spaces
4.2. Space Comparison
4.2.1. Classification
4.2.2. Physical Boundary and Modelling Components
4.2.3. Relevant Standards
4.2.4. Granularity
4.3. Summary
5. Conclusions
Author Contributions
Acknowledgments
Conflicts of Interest
References
- Miller, G.A. WordNet: A lexical database for English. Commun. ACM 1995, 38, 39–41. [Google Scholar] [CrossRef]
- Ashihara, Y. Exterior Design in Architecture; Van Nostrand Reinhold Company: New York, NY, USA, 1981. [Google Scholar]
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for Indoor Applications; GISt Report No. 66; Delft University of Technology, OTB Research Institute for the Built Environment: Delft, The Netherlands, 2014. [Google Scholar]
- Kim, J.; Kim, T.; Leigh, S.B. Double window system with ventilation slits to prevent window surface condensation in residential buildings. Energy Build. 2011, 43, 3120–3130. [Google Scholar] [CrossRef]
- He, J.; Hoyano, A. Measurement and evaluation of the summer microclimate in the semi-enclosed space under a membrane structure. Build. Environ. 2010, 45, 230–242. [Google Scholar] [CrossRef]
- Kim, K.; Park, S.; Kim, B.S. Survey and numerical effect analyses of the market structure and arcade form on the indoor environment of enclosed-arcade markets during summer. Sol. Energy 2008, 82, 940–955. [Google Scholar] [CrossRef]
- Nasir, N.H.M.; Salim, F.; Yaman, M. The potential of outdoor space utilization for learning interaction. In UMRAN2014: Fostering Ecosphere in Built Environment, International Islamic University Malaysia; Kulliyyah of Architecture and Environmental Design: Selangor, Malaysia, 2014; pp. 1–17. [Google Scholar]
- Lin, T.P. Thermal perception, adaptation and attendance in a public square in hot and humid regions. Build. Environ. 2009, 44, 2017–2026. [Google Scholar] [CrossRef]
- Werb, J.; Lanzl, C. Designing a positioning system for finding things and people indoors. IEEE Spectr. 1998, 35, 71–78. [Google Scholar] [CrossRef]
- Li, K.J. Indoor space. In International Symposium on Web and Wireless Geographical Information Systems; Springer: Shanghai, China, 2008; pp. 1–3. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Graph model based indoor tracking. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; pp. 122–131. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Indoor—A New Data Management Frontier. IEEE Data Eng. Bull. 2010, 33, 12–17. [Google Scholar]
- Worboys, M. Modeling indoor space. In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Chicago, IL, USA, 3–5 October 2011; pp. 1–6. [Google Scholar]
- Baniukevic, A.; Sabonis, D.; Jensen, C.S.; Lu, H. Improving Wi-Fi based indoor positioning using bluetooth add-ons. In Proceedings of the 2011 IEEE 12th International Conference on Mobile Data Management, Lulea, Sweden, 6–9 June 2011; Volume 1, pp. 246–255. [Google Scholar]
- Zhou, P.; Zheng, Y.; Li, Z.; Li, M.; Shen, G. Iodetector: A generic service for indoor outdoor detection. In Proceedings of the 10th acm conference on embedded network sensor systems, Toronto, ON, Canada, 6–9 November 2012; pp. 113–126. [Google Scholar]
- Baniukevic, A.; Jensen, C.S.; Lu, H. Hybrid indoor positioning with wi-fi and bluetooth: Architecture and performance. In Proceedings of the 2013 IEEE 14th International Conference on Mobile Data Management, Milan, Italy, 3–6 June 2013; Volume 1, pp. 207–216. [Google Scholar]
- Kray, C.; Fritze, H.; Fechner, T.; Schwering, A.; Li, R.; Anacta, V.J. Transitional spaces. In International Conference on Spatial Information Theory; Springer: Scarborough, UK, 6 September 2013; pp. 14–32. [Google Scholar]
- Wang, W.; Chang, Q.; Li, Q.; Shi, Z.; Chen, W. Indoor-Outdoor detection using a smart phone sensor. Sensors 2016, 16, 1563. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. An extraction approach of the top-bounded space formed by buildings for pedestrian navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S.; Aleksandrov, M. Top-Bounded spaces formed by the built environment for navigation systems. ISPRS Int. J. -Geo-Inf. 2019, 8, 224. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. A generic space definition framework to support seamless indoor/outdoor navigation systems. Trans. GIS 2019, 23, 1273–1295. [Google Scholar] [CrossRef]
- Mulloni, A.; Wagner, D.; Barakonyi, I.; Schmalstieg, D. Indoor positioning and navigation with camera phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Zlatanova, S.; Liu, L.; Sithole, G. A conceptual framework of space subdivision for indoor navigation. In Proceedings of the Fifth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Orlando, FL, USA, 5 November 2013; pp. 37–41. [Google Scholar]
- Krūminaitė, M.; Zlatanova, S. Indoor space subdivision for indoor navigation. In Proceedings of the sixth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Fort Worth, TX, USA, 4–7 November 2014; pp. 25–31. [Google Scholar]
- Brown, G.; Nagel, C.; Zlatanova, S.; Kolbe, T.H. Modelling 3D topographic space against indoor navigation requirements. In Progress and New Trends in 3D Geoinformation Sciences; Springer: London, UK, 2013; pp. 1–22. [Google Scholar]
- Liu, L.; Zlatanova, S. A two-level path-finding strategy for indoor navigation. In Intelligent Systems for Crisis Management; Springer: London, UK, 2013; pp. 31–42. [Google Scholar]
- Kim, K.; Wilson, J.P. Planning and visualising 3D routes for indoor and outdoor spaces using CityEngine. J. Spat. Sci. 2015, 60, 179–193. [Google Scholar] [CrossRef]
- Diakité, A.A.; Zlatanova, S. Spatial subdivision of complex indoor environments for 3D indoor navigation. Int. J. Geogr. Inf. Sci. 2018, 32, 213–235. [Google Scholar] [CrossRef]
- Giudice, N.A.; Walton, L.A.; Worboys, M. The informatics of indoor and outdoor space: A research agenda. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, San Jose, CA, USA, 3–5 November 2010; pp. 47–53. [Google Scholar]
- Yang, L.; Worboys, M. A navigation ontology for outdoor-indoor space:(work-in-progress). In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Chicago, IL, USA, November 2011; pp. 31–34. [Google Scholar]
- Yang, L.; Worboys, M. Similarities and differences between outdoor and indoor space from the perspective of navigation. In Proceedings of the Poster at COSIT, Belfast, ME, USA, 12–16 September 2011. [Google Scholar]
- Hwang, R.L.; Lin, T.P. Thermal comfort requirements for occupants of semi-outdoor and outdoor environments in hot-humid regions. Archit. Sci. Rev. 2007, 50, 357–364. [Google Scholar] [CrossRef]
- Van Timmeren, A.; Turrin, M. Case study ‘the Vela Roof–UNIPOL’, Bologna: use of on-site climate and energy resources. WIT Trans. Ecol. Environ. 2009, 121, 333–342. [Google Scholar]
- Van Hooff, T.A.J.; Blocken, B. Computational analysis of natural ventilation in a large semi-enclosed stadium. In Proceedings of the 5th European and African Conference on Wind Engineering, Florence, Italy, 8–12 November 2009; Firenze University Press: Florence, Italy, 2009; pp. 1–11. [Google Scholar]
- Bouyer, J.; Vinet, J.; Delpech, P.; Carré, S. Thermal comfort assessment in semi-outdoor environments: Application to comfort study in stadia. J. Wind. Eng. Ind. Aerodyn. 2007, 95, 963–976. [Google Scholar] [CrossRef]
- Liu, X.H.; Chen, Q.Y.; Liu, H.; Yu, H.; Bie, F.Y. Urban solar updraft tower integrated with hi-rise building-case study of Wuhan new energy institute headquarter. In Solar Updraft Tower Power Technology; Trans Tech Publications: Stäfa, Switzerland, 2013; pp. 67–71. [Google Scholar]
- Monteiro, L.M.; Alucci, M.P. Transitional spaces in São Paulo, Brazil: Mathematical modeling and empirical calibration for thermal comfort assessment. Build. Simul. 2007, 737–744. [Google Scholar]
- Booth, N.K. Basic Elements of Landscape Architectural Design; Waveland Press: Long Grove, IL, USA, 1989. [Google Scholar]
- Austin, R.L. Elements of Planting Design; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Farina, A. Principles and Methods in Landscape Ecology: Towards a Science of the Landscape; Springer Science & Business Media: London, UK, 2008; Volume 3. [Google Scholar]
- Tonnelat, S. The sociology of urban public spaces. In Territorial Evolution and Planning Solution: Experiences from China and France; Atlantis Press: Paris, France, 2010; pp. 84–92. [Google Scholar]
- Fisher-Gewirtzman, D. 3D models as a platform for urban analysis and studies on human perception of space. In Usage, Usability, and Utility of 3D City Models–European COST Action TU0801; EDP Sciences: Les Ulis, France, 2012; p. 01001. [Google Scholar]
- Clouston, B. Landscape Design with Plants; Newnes: New South Wales, Australia, 2013. [Google Scholar]
- Oke, T.R. City size and the urban heat island. Atmos. Environ. (1967) 1973, 7, 769–779. [Google Scholar] [CrossRef]
- Kim, H.H. Urban heat island. Int. J. Remote Sens. 1992, 13, 2319–2336. [Google Scholar] [CrossRef]
- Rizwan, A.M.; Dennis, L.Y.; Chunho, L. A review on the generation, determination and mitigation of Urban Heat Island. J. Environ. Sci. 2008, 20, 120–128. [Google Scholar] [CrossRef]
- Guerin, D.A. Issues facing interior design education in the twenty-first century. J. Inter. Des. 1991, 17, 9–16. [Google Scholar] [CrossRef]
- Harwood, B. Comparing the standards in interior design and architecture to assess similarities and differences. J. Inter. Des. 1991, 17, 5–18. [Google Scholar] [CrossRef]
- Mitton, M.; Nystuen, C. Residential Interior Design: A Guide to Planning Spaces; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar]
- Lee, J.H.; Hashimoto, H. Intelligent space–concept and contents. Adv. Robot. 2002, 16, 265–280. [Google Scholar] [CrossRef]
- Ahmed, N.; Miller, H.J. Time–space transformations of geographic space for exploring, analyzing and visualizing transportation systems. J. Transp. Geogr. 2007, 15, 2–17. [Google Scholar] [CrossRef]
- Yang, L.; Wang, F.Y. Driving into intelligent spaces with pervasive communications. IEEE Intell. Syst. 2007, 22, 12–15. [Google Scholar] [CrossRef]
- Qu, F.; Wang, F.Y.; Yang, L. Intelligent transportation spaces: Vehicles, traffic, communications, and beyond. IEEE Commun. Mag. 2010, 48, 136–142. [Google Scholar] [CrossRef]
- Lee, J.H.; Hashimoto, H. Intelligent space, its past and future. In Proceedings of the IECON’99—Conference Proceedings 25th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 99CH37029), San Jose, CA, USA, 29 November–3 December 1999; Volume 1, pp. 126–131. [Google Scholar]
- Wright, S.; Steventon, A. Intelligent spaces—The vision, the opportunities and the barriers. BT Technol. J. 2004, 22, 15–26. [Google Scholar] [CrossRef]
- Wang, F.Y.; Zeng, D.; Yang, L. Smart cars on smart roads: An IEEE intelligent transportation systems society update. IEEE Pervasive Comput. 2006, 5, 68–69. [Google Scholar] [CrossRef]
- Liu, B.; Wang, F.Y.; Geng, J.; Yao, Q.; Gao, H.; Zhang, B. Intelligent spaces: An overview. In Proceedings of the 2007 IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 13–15 December 2007; pp. 1–6. [Google Scholar]
- Princeton University. Princeton WorldNetWeb. 2010. Available online: http://wordnetweb.princeton.edu/perl/webwn (accessed on 17 December 2019).
- Lexico.com. Oxford Dictionary. 2019. Available online: https://en.oxforddictionaries.com (accessed on 17 December 2019).
- Merriam-Webster, Incorporated. Merriam-Webster Dictionary. 2019. Available online: https://www.merriam-webster.com/dictionary (accessed on 17 December 2019).
- Dictionary.com, LLC. Dictionary.com. 2019. Available online: http://www.dictionary.com/ (accessed on 17 December 2019).
- Cambridge University Press. Cambridge Dictionary. 2019. Available online: http://dictionary.cambridge.org (accessed on 17 December 2019).
- Collins. Collins Dictionary. 2019. Available online: https://www.collinsdictionary.com/ (accessed on 17 December 2019).
- Farlex, Inc. The Free Dictionary by Farlex. 2003–2019. Available online: http://www.thefreedictionary.com/ (accessed on 17 December 2019).
- Afyouni, I.; Ray, C.; Claramunt, C. A fine-grained context-dependent model for indoor spaces. In Proceedings of the 2nd ACM Sigspatial International Workshop on Indoor Spatial Awareness, San Jose, CA, USA, 3–5 November 2010; pp. 33–38. [Google Scholar]
- Winter, S. Indoor spatial information. Int. J. 3-D Inf. Model. (IJ3DIM) 2012, 1, 25–42. [Google Scholar] [CrossRef]
- Chen, J.; Clarke, K.C. Indoor cartography. Cartogr. Geogr. Inf. Sci. 2019, 1–15. [Google Scholar] [CrossRef]
- Amutha, B.; Nanmaran, K. Development of a ZigBee based virtual eye for visually impaired persons. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 564–574. [Google Scholar]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company, J.P. Saliency-driven Visual Inspection of Vessels by means of a Multirotor. In The Workshop on Vision-Based Control & Navigation of Small; IEEE: Hamburg, Germany, 2015; pp. 20–46. [Google Scholar]
- Du, X.; Bokel, R.; van den Dobbelsteen, A. Building microclimate and summer thermal comfort in free-running buildings with diverse spaces: A Chinese vernacular house case. Build. Environ. 2014, 82, 215–227. [Google Scholar] [CrossRef]
- Cao, B.; Luo, M.; Li, M.; Zhu, Y. Thermal comfort in semi-outdoor spaces within an office building in Shenzhen: A case study in a hot climate region of China. Indoor Built Environ. 2017, 27, 1431–1444. [Google Scholar] [CrossRef]
- Turrin, M.; Kilian, A.; Stouffs, R.; Sariyildiz, S. Digital design exploration of structural morphologies integrating adaptable modules. In A Design Process Based on Parametric Modeling. Proceedings of the Caad Futures 2009 International Conference: Joining Languages, Cultures and Visions, Lemessos, Cyprus, 29 October 2009; CUMINCAD: Montreal, Canada, 2009; pp. 17–19. [Google Scholar]
- Chengappa, C.; Edwards, R.; Bajpai, R.; Shields, K.N.; Smith, K.R. Impact of improved cookstoves on indoor air quality in the Bundelkhand region in India. Energy Sustain. Dev. 2007, 11, 33–44. [Google Scholar] [CrossRef]
- Lin, T.P.; Andrade, H.; Hwang, R.; Oliveira, S.; Matzarakis, A. The comparison of thermal sensation and acceptable range for outdoor occupants between Mediterranean and subtropical climates. In Proceedings of the 18th International Congress on Biometeorology, Tokyo, Japan, 22–26 September 2008. [Google Scholar]
- Indraganti, M. Adaptive use of natural ventilation for thermal comfort in Indian apartments. Build. Environ. 2010, 45, 1490–1507. [Google Scholar] [CrossRef]
- Pagliarini, G.; Rainieri, S. Thermal environment characterisation of a glass-covered semi-outdoor space subjected to natural climate mitigation. Energy Build. 2011, 43, 1609–1617. [Google Scholar] [CrossRef]
- Kim, T.; Kato, S.; Murakami, S. Indoor cooling/heating load analysis based on coupled simulation of convection, radiation and HVAC control. Build. Environ. 2001, 36, 901–908. [Google Scholar] [CrossRef]
- Philokyprou, M.; Michael, A.; Thravalou, S.; Ioannou, I. Thermal performance assessment of vernacular residential semi-open spaces in Mediterranean climate. Indoor Built Environ. 2017, 27, 1050–1068. [Google Scholar] [CrossRef]
- Li, S. Users’ behaviour of small urban spaces in winter and marginal seasons. Archit. Behav. 1994, 10, 95–109. [Google Scholar]
- Slingsby, A.; Raper, J. Navigable space in 3D city models for pedestrians. In Advances in 3D Geoinformation Systems; Springer: London, UK, 2008; pp. 49–64. [Google Scholar]
- Pagliarini, G.; Rainieri, S. Dynamic thermal simulation of a glass-covered semi-outdoor space with roof evaporative cooling. Energy Build. 2011, 43, 592–598. [Google Scholar] [CrossRef]
- Spagnolo, J.; De Dear, R. A field study of thermal comfort in outdoor and semi-outdoor environments in subtropical Sydney Australia. Build. Environ. 2003, 38, 721–738. [Google Scholar] [CrossRef]
- Turrin, M.; Von Buelow, P.; Kilian, A.; Stouffs, R. Performative skins for passive climatic comfort: A parametric design process. Autom. Constr. 2012, 22, 36–50. [Google Scholar] [CrossRef]
- Goshayeshi, D.; Shahidan, M.F.; Khafi, F.; Ehtesham, E. A review of researches about human thermal comfort in semi-outdoor spaces. Eur. Online J. Nat. Soc. Sci. 2013, 2, 516. [Google Scholar]
- Lin, T.P.; Matzarakis, A.; Huang, J.J. Thermal comfort and passive design strategy of bus shelters. In Proceedings of the 23rd Conference on Passive and Low Energy Architecture, Geneva, Switzerland, 6–8 September 2006. [Google Scholar]
- Yang, W.; Wong, N.H.; Jusuf, S.K. Thermal comfort in outdoor urban spaces in Singapore. Build. Environ. 2013, 59, 426–435. [Google Scholar] [CrossRef]
- Robinson, N. The Planting Design Handbook; Routledge: Abingdon, UK, 1992. [Google Scholar]
- Li, X. Study on the Structures and Images of Landscape Planting. Ph.D. Thesis, Beijing Forestry University, Beijing, China, 2006. [Google Scholar]
- Dee, C. Form and Fabric in Landscape Architecture: A Visual Introduction; Taylor & Francis: London, UK, 2004. [Google Scholar]
- Li, Y.m.; Guo, J.; Feng, J. Urban green space and its effect on urban heat island effect. Urban Environ. Urban Ecol. 2004, 17, 1–4. [Google Scholar]
- Heidt, V.; Neef, M. Benefits of urban green space for improving urban climate. In Ecology, Planning, and Management of Urban Forests; Springer: London, UK, 2008; pp. 84–96. [Google Scholar]
- Yao, L.; Chen, L.; Wei, W.; Sun, R. Potential reduction in urban runoff by green spaces in Beijing: A scenario analysis. Urban For. Urban Green. 2015, 14, 300–308. [Google Scholar] [CrossRef]
- Jim, C.Y. Green-space preservation and allocation for sustainable greening of compact cities. Cities 2004, 21, 311–320. [Google Scholar] [CrossRef]
- Jim, C.Y.; Chen, W.Y. Perception and attitude of residents toward urban green spaces in Guangzhou (China). Environ. Manag. 2006, 38, 338–349. [Google Scholar] [CrossRef]
- Tian, Y.; Jim, C.Y.; Wang, H. Assessing the landscape and ecological quality of urban green spaces in a compact city. Landsc. Urban Plan. 2014, 121, 97–108. [Google Scholar] [CrossRef]
- McPhearson, T.; Andersson, E.; Elmqvist, T.; Frantzeskaki, N. Resilience of and through urban ecosystem services. Ecosyst. Serv. 2015, 12, 152–156. [Google Scholar] [CrossRef]
- Sun, R.; Chen, L. Effects of green space dynamics on urban heat islands: Mitigation and diversification. Ecosyst. Serv. 2017, 23, 38–46. [Google Scholar] [CrossRef]
- Faryadi, S.; Taheri, S. Interconnections of urban green spaces and environmental quality of Tehran. Int. J. Environ. Res. 2009, 3, 199–208. [Google Scholar]
- Balling, R.C., Jr.; Lolk, N.K. A developing cool island in the desert? The case of Palm Springs, California. J. Ariz. Nev. Acad. Sci. 1991, 23, 93–96. [Google Scholar]
- Spronken-Smith, R.; Oke, T. The thermal regime of urban parks in two cities with different summer climates. Int. J. Remote Sens. 1998, 19, 2085–2104. [Google Scholar] [CrossRef]
- Chang, C.R.; Li, M.H.; Chang, S.D. A preliminary study on the local cool-island intensity of Taipei city parks. Landsc. Urban Plan. 2007, 80, 386–395. [Google Scholar] [CrossRef]
- Wolch, J.R.; Byrne, J.; Newell, J.P. Urban green space, public health, and environmental justice: The challenge of making cities ‘just green enough’. Landsc. Urban Plan. 2014, 125, 234–244. [Google Scholar] [CrossRef]
- Zhang, Y.; Murray, A.T.; Turner Ii, B. Optimizing green space locations to reduce daytime and nighttime urban heat island effects in Phoenix, Arizona. Landsc. Urban Plan. 2017, 165, 162–171. [Google Scholar] [CrossRef]
- Launchpad. 7 Elements of Interior Design. 2015. Available online: http://launchpadacademy.in/elements-of-interior-design-2/ (accessed on 17 December 2019).
- Singh, S.K. Review of urban transportation in India. J. Public Transp. 2005, 8, 5. [Google Scholar] [CrossRef]
- Currie, G.; Sarvi, M.; Young, B. A new approach to evaluating on-road public transport priority projects: balancing the demand for limited road-space. Transportation 2007, 34, 413–428. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.H. OGC City Geography Markup Language (CityGML) Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Litman, T. Introduction to Multi-modal Transportation Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Wu, Q.; Huang, C.; Wang, S.Y.; Chiu, W.C.; Chen, T. Robust parking space detection considering inter-space correlation. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 659–662. [Google Scholar]
- True, N. Vacant Parking Space Detection in Static Images; University of California: San Diego, CA, USA, 2007; Volume 17, pp. 659–662. [Google Scholar]
- Park, W.J.; Kim, B.S.; Seo, D.E.; Kim, D.S.; Lee, K.H. Parking space detection using ultrasonic sensor in parking assistance system. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1039–1044. [Google Scholar]
- Ichihashi, H.; Notsu, A.; Honda, K.; Katada, T.; Fujiyoshi, M. Vacant parking space detector for outdoor parking lot by using surveillance camera and FCM classifier. In Proceedings of the 2009 IEEE International Conference on Fuzzy Systems, Jeju Island, South Korea, 20–24 August 2009; pp. 127–134. [Google Scholar]
- Yusnita, R.; Norbaya, F.; Basharuddin, N. Intelligent parking space detection system based on image processing. Int. J. Innov. Manag. Technol. 2012, 3, 232–235. [Google Scholar]
- Klappenecker, A.; Lee, H.; Welch, J.L. Finding available parking spaces made easy. Ad Hoc Netw. 2014, 12, 243–249. [Google Scholar] [CrossRef]
- Verroios, V.; Efstathiou, V.; Delis, A. Reaching available public parking spaces in urban environments using ad hoc networking. In Proceedings of the 2011 IEEE 12th International Conference on Mobile Data Management, Lulea, Sweden, 6–9 June 2011; Volume 1, pp. 141–151. [Google Scholar]
- Coric, V.; Gruteser, M. Crowdsensing maps of on-street parking spaces. In Proceedings of the 2013 IEEE International Conference on Distributed Computing in Sensor Systems, Cambridge, MA, USA, 20–23 May 2013; pp. 115–122. [Google Scholar]
- Delot, T.; Ilarri, S.; Lecomte, S.; Cenerario, N. Sharing with caution: Managing parking spaces in vehicular networks. Mob. Inf. Syst. 2013, 9, 69–98. [Google Scholar] [CrossRef]
- Appenzeller, G.; Lee, J.H.; Hashimoto, H. Building topological maps by looking at people: An example of cooperation between intelligent spaces and robots. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications, IROS’97, Grenoble, France, 11 September 1997; Volume 3, pp. 1326–1333. [Google Scholar]
- Hollands, R.G. Will the real smart city please stand up? Intelligent, progressive or entrepreneurial? City 2008, 12, 303–320. [Google Scholar] [CrossRef]
- Lee, J.H.; Appenzeller, G.; Hashimoto, H. An agent for intelligent spaces: functions and roles of mobile robots in sensored, networked and thinking spaces. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 12 November 1997; pp. 983–988. [Google Scholar]
- Raghothama, S.; Shapiro, V. Boundary representation deformation in parametric solid modeling. ACM Trans. Graph. (TOG) 1998, 17, 259–286. [Google Scholar] [CrossRef]
- Rossignac, J.R. Constraints in constructive solid geometry. In Proceedings of the 1986 workshop on Interactive 3D Graphics, Chapel Hill, NC, USA, 23–24 October 1987; pp. 93–110. [Google Scholar]
- Ramakrishnan, C.; Ramakrishnan, S.; Kumar, A.; Bhattacharya, M. An integrated approach for automated generation of two/three dimensional finite element grids using spatial occupancy enumeration and Delaunay triangulation. Int. J. Numer. Methods Eng. 1992, 34, 1035–1050. [Google Scholar] [CrossRef]
- Gorte, B.; Aleksandrov, M.; Zlatanova, S. Towards egress modelling in Voxel building models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 43–47. [Google Scholar] [CrossRef]
- Aleksandrov, M.; Zlatanova, S.; Kimmel, L.; Barton, J.; Gorte, B. Voxel-Based Visibility Analysis for Safety Assessment of Urban Environments. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 11–17. [Google Scholar] [CrossRef]
- Li, F.; Zlatanova, S.; Koopman, M.; Bai, X.; Diakité, A. Universal path planning for an indoor drone. Autom. Constr. 2018, 95, 275–283. [Google Scholar] [CrossRef]
- Gorte, B.; Zlatanova, S.; Fadli, F. Navigation in indoor voxel models. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W5, 279–283. [Google Scholar] [CrossRef]
- Lee, J.; Li, K.J.; Zlatanova, S.; Kolbe, T.; Nagel, C.; Becker, T. OGC IndoorGML; OGC: Wayland, MA, USA, 2014. [Google Scholar]
- Becker, T.; Nagel, C.; Kolbe, T.H. A multilayered space-event model for navigation in indoor spaces. In 3D Geo-Information Sciences; Springer: London, UK, 2009; pp. 61–77. [Google Scholar]
- Boguslawski, P.; Gold, C. Construction operators for modelling 3D objects and dual navigation structures. In 3D Geo-Information Sciences; Springer: London, UK, 2009; pp. 47–59. [Google Scholar]
- Munkres, J.R. Elements of Algebraic Topology; Addison-Wesley: Menlo Park, CA, USA, 1984; Volume 2. [Google Scholar]
- Mortari, F.; Zlatanova, S.; Liu, L.; Clementini, E. “Improved geometric network model” (IGNM): A novel approach for deriving connectivity graphs for indoor navigation. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 45. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, C.; Zhou, L.; Lin, B.; Lv, G. Extracting indoor space information in complex building environments. Isprs Int. J. -Geo-Inf. 2018, 7, 321. [Google Scholar] [CrossRef]
- Beirão, J.N.; Chaszar, A. Convex-and Solid-Void Models for Analysis and Classification of Public Spaces. In Proceedings of the 19th CAADRIA International Conference, Kyoto, Japan, 14–16 May 2014; pp. 253–262. [Google Scholar]
- Beirão, J.N.; Chaszar, A.; Čavić, L. Analysis and Classification of Public Spaces Using Convex and Solid-Void Models. In Future City Architecture for Optimal Living; Springer: London, UK, 2015; pp. 241–270. [Google Scholar]
- Sileryte, R.; Cavic, L.; Beirao, J.N. Automated generation of versatile data model for analyzing urban architectural void. Comput. Environ. Urban Syst. 2017, 66, 130–144. [Google Scholar] [CrossRef]
- buildingSMART International Ltd. Industry Foundation Classes Version 4.2 bSI Draft Standard IFC Bridge Proposed Extension. 1996–2019. Available online: https://standards.buildingsmart.org/IFC/DEV/IFC4_2/FINAL/HTML/ (accessed on 17 December 2019).
- Kara, A.; Çağdaş, V.; Işıkdağ, Ü.; Turan, B.O. Towards harmonizing property measurement standards. J. Spat. Inf. Sci. 2018, 2018, 87–119. [Google Scholar] [CrossRef]
- Lemmen, C.; Van Oosterom, P.; Thompson, R.; Hespanha, J.P.; Uitermark, H. The modelling of spatial units (parcels) in the Land Administration Domain Model (LADM). In Proceedings of the XXIV FIG International Congress 2010: Facing the Challenges - Building the Capacity. International Federation of Surveyors, Sydney, Australia, 11–16 April 2010. [Google Scholar]
- Lemmen, C.; Van Oosterom, P.; Bennett, R. The land administration domain model. Land Use Policy 2015, 49, 535–545. [Google Scholar] [CrossRef]
- Zlatanova, S.; Li, K.; Lemmen, C.; van Oosterom, P. Indoor abstract spaces: linking IndoorGML and LADM. In Proceedings of the 5th international FIG workshop on 3D cadastres, Athens, Greece, 18–20 October 2016; FIG: Delft, The Netherlands, 2016; pp. 317–328. [Google Scholar]
- Zlatanova, S.; Van Oosterom, P.; Lee, J.; Li, K.; Lemmen, C. LADM and IndoorGML for support of indoor space identification. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 4, 257–263. [Google Scholar] [CrossRef]
- Alattas, A.; Zlatanova, S.; Van Oosterom, P.; Chatzinikolaou, E.; Lemmen, C.; Li, K.J. Supporting indoor navigation using access rights to spaces based on combined use of IndoorGML and LADM models. Isprs Int. J. -Geo-Inf. 2017, 6, 384. [Google Scholar] [CrossRef]
- Yan, J.; Zlatanova, S.; Aleksandrov, M.; Diakite, A.; Pettit, C. Integration of 3d Objects and Terrain for 3d Modelling Supporting the Digital Twin. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 147–154. [Google Scholar] [CrossRef]
- Zlatanova, S.; Gruber, M.; Kofler, M. Merging DTM and CAD data for 3D Modeling purposes for Urban Areas. In Proceedings of the ISPRS Proceedings, Cambridge, MA, USA, 19–21 June 1996; Volume 36, pp. 311–315. [Google Scholar]
- Zlatanova, S.; Bandrova, T. User requirements for the third dimensionality. In E-mail Seminar of Cartography; Springer: London, UK, 1998; Volume 1, pp. 61–72. [Google Scholar]
- Hillier, B.; Hanson, J. The Social Logic of Space; Cambridge University Press: Cambridge, UK, 1984. [Google Scholar]
- Jiang, B.; Liu, X. Automatic generation of the axial lines of urban environments to capture what we perceive. Int. J. Geogr. Inf. Sci. 2010, 24, 545–558. [Google Scholar] [CrossRef]
- Rampinelli, M.; Covre, V.; de Queiroz, F.; Vassallo, R.; Bastos-Filho, T.; Mazo, M. An intelligent space for mobile robot localization using a multi-camera system. Sensors 2014, 14, 15039–15064. [Google Scholar] [CrossRef]
- Bodgan, J.; Coors, V. Using 3D urban models for pedestrian navigation support. In Proceedings of the ISPRS Working Group III/4, IV/8, IV/5, Berlin, Germany, 23 September 2009; pp. 9–15. [Google Scholar]
- Andreev, S.; Dibbelt, J.; Nöllenburg, M.; Pajor, T.; Wagner, D. Towards realistic pedestrian route planning. In Proceedings of the 15th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS 2015), Patras, Greece, 17 September 2015. [Google Scholar]
- Vanclooster, A.; Van de Weghe, N.; De Maeyer, P. Integrating indoor and outdoor spaces for pedestrian navigation guidance: A review. Trans. GIS 2016, 20, 491–525. [Google Scholar] [CrossRef]
- Graser, A. Integrating open spaces into OpenStreetMap routing graphs for realistic crossing behaviour in pedestrian navigation. Int. J. Geogr. Inf. Sci. 2016, 4, 217–230. [Google Scholar] [CrossRef][Green Version]
- Hannah, C.; Spasić, I.; Corcoran, P. A computational model of pedestrian road safety: the long way round is the safe way home. Accid. Anal. Prev. 2018, 121, 347–357. [Google Scholar] [CrossRef] [PubMed]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sources | Space | Indoor | Outdoor |
|---|---|---|---|
| Princeton WorldNetWeb [59] | Space is either unlimited expand or an empty area usually bounded in some way between things (e.g., the architect left space in front of the building) or an area reserved for some particular purpose (e.g., the laboratory’s floor space). | Indoor is located, suited for or taking place within, a building, for example, indoor activities for a rainy day; an indoor pool. | Outdoor is also called as out-of-door or outside, which is located, suited for or taking place in the open air, that is, outdoor clothes; badminton and other outdoor games; a beautiful outdoor setting for the wedding. |
| Oxford Dictionary [60] | Space is a continuous area or expanse which is free, available or unoccupied; An area of land which is not occupied by buildings. | Indoor is situated, conducted or used within a building or under cover. The origin of indoor is from in (as a preposition) + door in early 18th century, superseding earlier within-door. | Outdoor is a done, situated or used out of doors. |
| Merriam-Webster [61] | Space is a boundless three-dimensional extent in which objects and events occur and have relative position and direction, for example, infinite space and time. Or a physical space independent of what occupies is called also absolute space. | Indoor is of or relating to the interior of a building; done, living, located or used inside a building. | Outdoor is of or relating to the outdoors; not enclosed: having no roof. done, used or located outside a building. |
| Dictionary [62] | Space is the unlimited or incalculably great three-dimensional realm or expanse in which all material objects are located and all events occur. It also can be defined as the portion or extent of this in a given instance; extent or room in three dimensions, for instance, the space occupied by a body. | Indoor means occurring, used, etc., in a house or building, rather than out of doors, for example, indoor games. | Outdoor means taking place, existing or intended for use in the open air, for example, outdoor games, outdoor clothes. Also out-of-door; out of doors; in the open air; the world outside of or away from houses. |
| Cambridge Dictionary [63] | Space is an empty area that is available to be used. From the dimension of view, the space is the area around everything that exists, continuing in all directions. | Indoor means happening, used or existing inside a building, for example, indoor sports/activities, an indoor racetrack/swimming pool. | Outdoor means existing, happening or done outside, rather than inside a building, for example, an outdoor swimming pool/festival, outdoor clothes; Or liking/relating to outdoor activities, such as walking and climbing. |
| Collins Dictionary [64] | Space refers to an area that is empty or available and the area can be any size. Space means the unlimited three-dimensional expanse in which all material objects are located. Space is the whole area within which everything exists. | Indoor means situated in, or appropriate to, the inside of a house or other building; Or of the inside of a house or building; Or living, belonging or carried on within a house or building. | Outdoor, also out-of-door, means taking place, existing or intended for use in the open air, for example, outdoor games, outdoor clothes. |
| TheFreeDictionary [65] | Space is an infinite extension of the three-dimensional region in which all matter exists. | Indoor is situated in or appropriate to the inside of a house or other building, for example, an indoor tennis court; indoor amusements. | Outdoor means the open air. Or an area away from human settlements. |
| Name | Brief Definition | Examples | References |
|---|---|---|---|
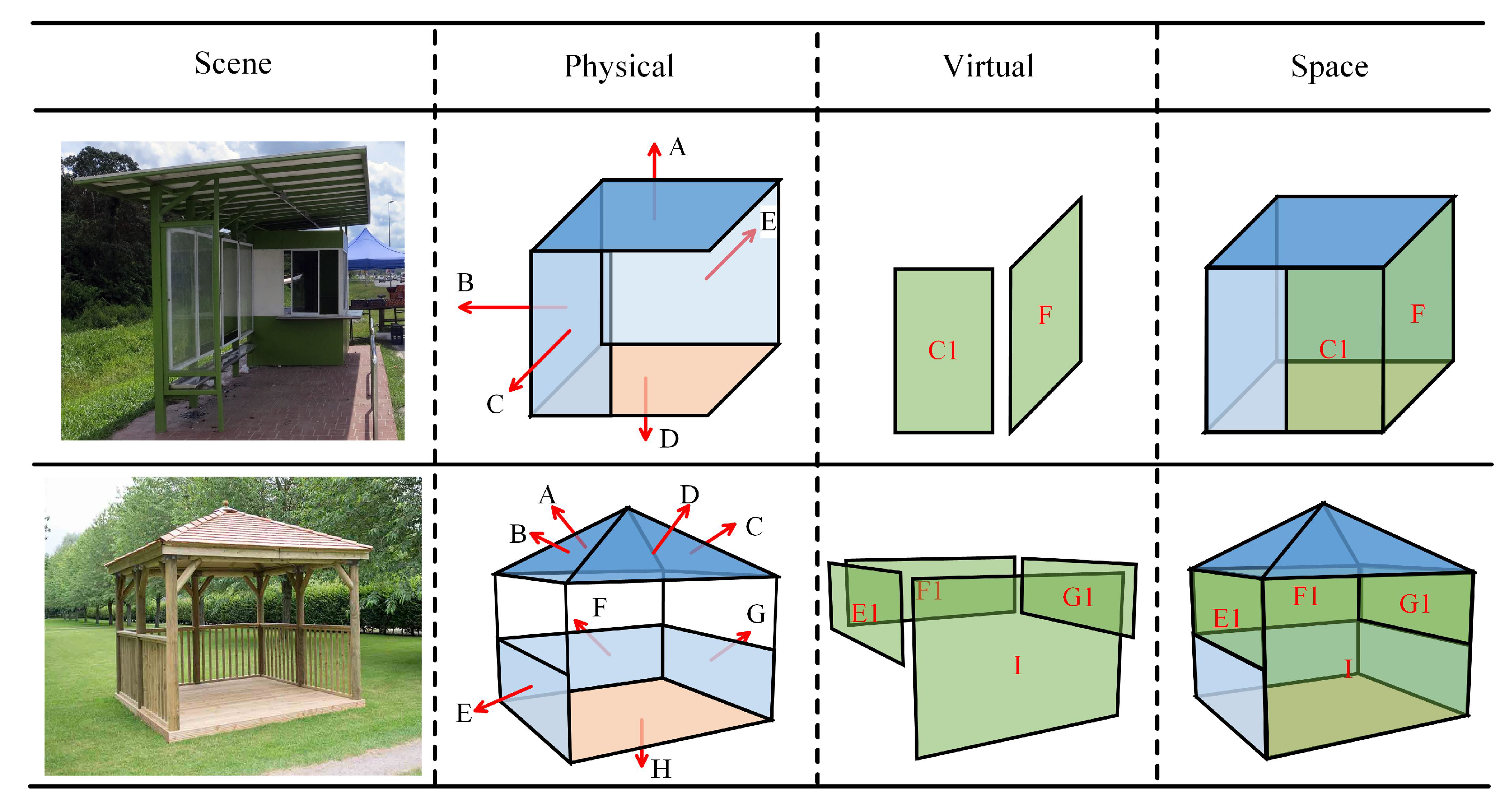
| Semi-indoor space | A space covered with canopies that is related to a building and can combine indoor and outdoor climate conditions. | Balcony (installed with external windows), courtyard, open air kitchen with 3 walls, open space equipped with overhead shed/arcades. | [4,6,37,38,73,74] |
| Semi-outdoor/ semi-open space/ semi-enclosed space | A space that is not enclosed entirely and has some settings including human-made structures that moderate the effects of the outdoor conditions | Space with eave, courtyard, sheltered space, sheltered balconies, outdoor space partly enclosed by a semi-transparent pitched roof | [5,33,71,75,76,77,78,79] |
| Connection/transition zones/buffer areas/transitional spaces | Spaces that are located between indoor and outdoor but neither indoor nor outdoor. | Tunnel-like underpass, tunnels, enclosed footbridges, partially roofed courtyards | [17,67,80,81] |
| Fields | Classification | Physical Boundary | Modelling Components | Relevant Standards | Granularity (Small → Large) |
|---|---|---|---|---|---|
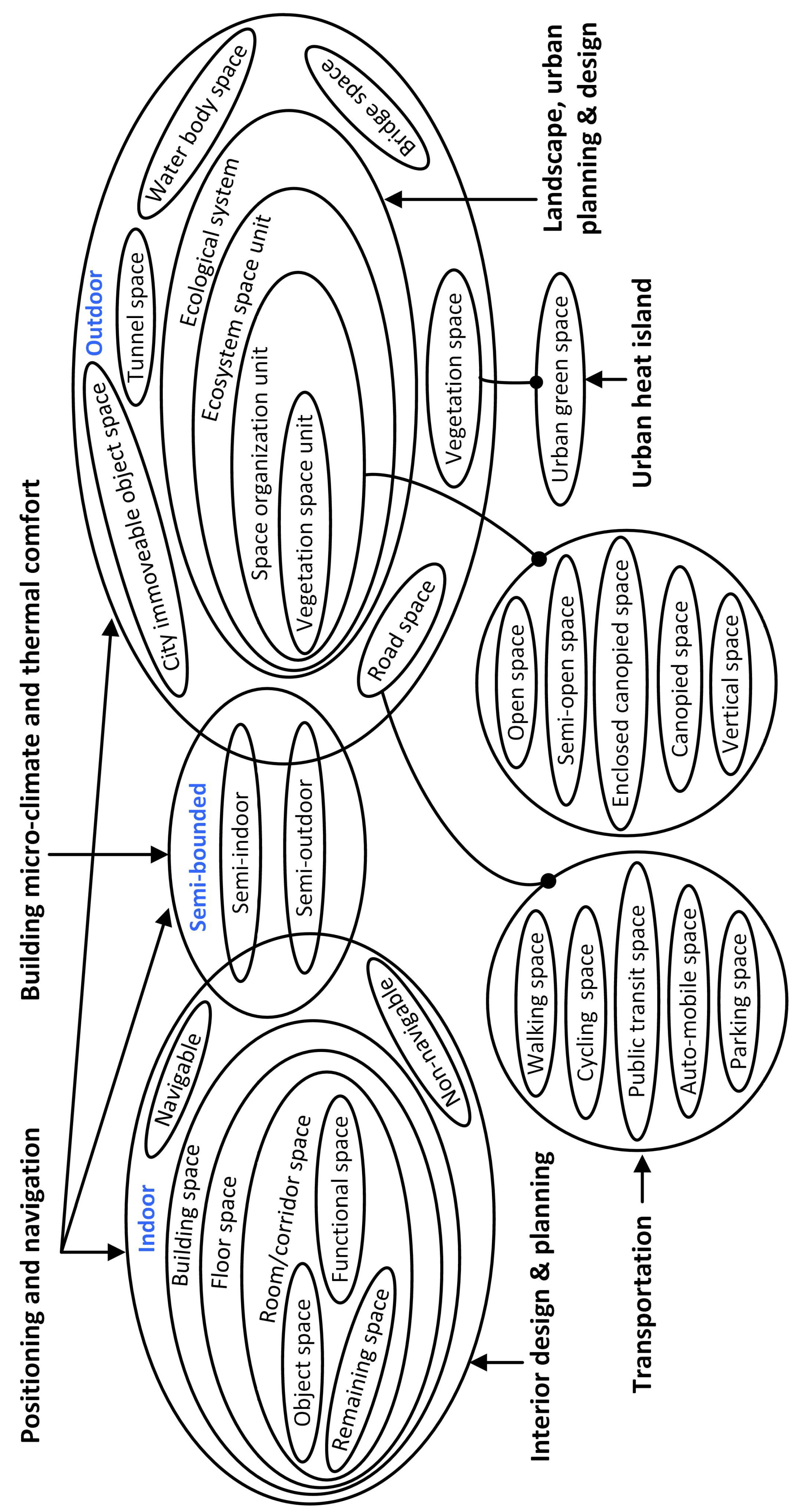
| Navigation | Functional space object space remaining space Indoor Semi-indoor Semi-outdoor Outdoor | Architectural (e.g., wall, floor, roof, fence) | Top Side Bottom | IndoorGML, CityGML, IFC, LADM | Object/functional/remaining space, room/corridor space, floor space, building space; |
| Positioning and Localization | Indoor Semi-outdoor Outdoor | Building, waterbody, bridge, tunnel | CityGML, LADM | City objects/ water bodies/ tunnel/ vegetation/ bridge/ road/ building, city | |
| Building Micro-climate and Thermal Comfort | Indoor Outdoor Semi-indoor/ Semi-outdoor | Architectural (e.g., wall, floor, roof, fence) | CityGML, IFC, LADM | Building/building blocks | |
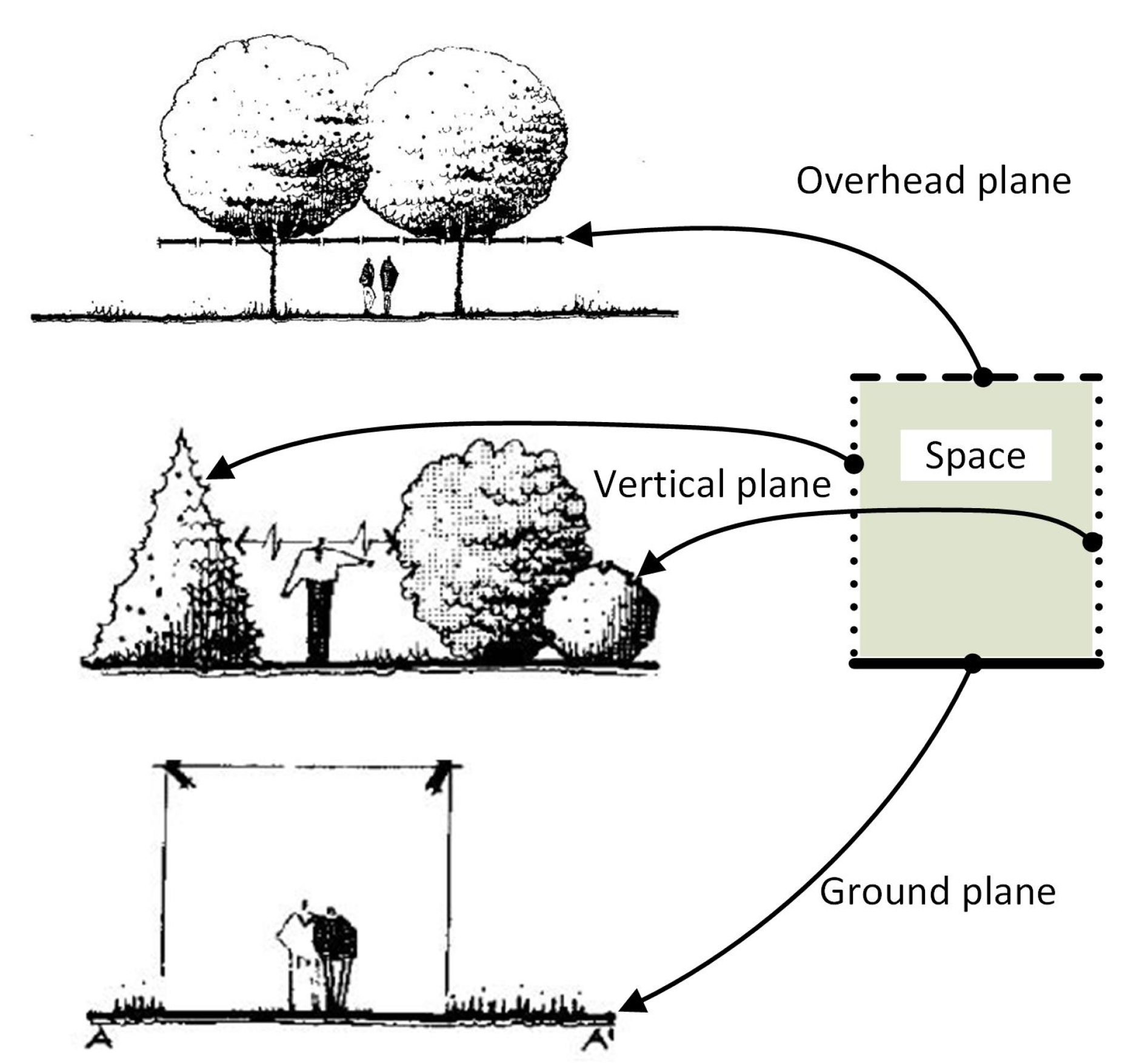
| Landscape, Urban Planning and Design | Open space Partially open space Vertical space Canopied space Enclosed canopied space | Vegetation, paths, edges (linear elements), districts (spaces), nodes (strategic spots), and landmarks | Overhead plane Vertical plane Ground plane | CityGML, LADM | Vegetation space unit space organization unit ecosystem unit ecological system |
| Urban Heat Island | (Urban) green space | Vegetation (e.g., grass, tree, shrub) | Ground (terrain) | CityGML | Grass area/bushes area/shrubs area |
| Interior Design and Planning | Functional space object space remaining space Indoor space | Furnitures, markers | Top Side Bottom | IndoorGML, CityGML, IFC, LADM | Object/functional/remaining space, room/corridor space, floor space, building space |
| Transportation | Walking space cycling space public transit space auto-mobile space isolation zones parking space | Architectural (e.g., tarmac, concrete) Natural (e.g., grass) | Ground (terrain) | CityGML, LADM | Walking space/ cycling space/ public transit space/ auto-mobile space/ isolation zones/ parking space, road |
| Intelligent Space | All spaces mentioned in other fields | All materials mentioned in other fields | IndoorGML, CityGML, IFC, LADM |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zlatanova, S.; Yan, J.; Wang, Y.; Diakité, A.; Isikdag, U.; Sithole, G.; Barton, J. Spaces in Spatial Science and Urban Applications—State of the Art Review. ISPRS Int. J. Geo-Inf. 2020, 9, 58. https://doi.org/10.3390/ijgi9010058
Zlatanova S, Yan J, Wang Y, Diakité A, Isikdag U, Sithole G, Barton J. Spaces in Spatial Science and Urban Applications—State of the Art Review. ISPRS International Journal of Geo-Information. 2020; 9(1):58. https://doi.org/10.3390/ijgi9010058
Chicago/Turabian StyleZlatanova, Sisi, Jinjin Yan, Yijing Wang, Abdoulaye Diakité, Umit Isikdag, George Sithole, and Jack Barton. 2020. "Spaces in Spatial Science and Urban Applications—State of the Art Review" ISPRS International Journal of Geo-Information 9, no. 1: 58. https://doi.org/10.3390/ijgi9010058
APA StyleZlatanova, S., Yan, J., Wang, Y., Diakité, A., Isikdag, U., Sithole, G., & Barton, J. (2020). Spaces in Spatial Science and Urban Applications—State of the Art Review. ISPRS International Journal of Geo-Information, 9(1), 58. https://doi.org/10.3390/ijgi9010058