Abstract
In spatial science and urban applications, “space" is presented by multiple disciplines as a notion referencing our living environment. Space is used as a general term to help understand particular characteristics of the environment. However, the definition and perception of space varies and these variations have to be harmonised. For example, space may have diverse definitions and classification, the same environment may be abstracted/modelled by contradicting notions of space, which can lead to inconsistencies and misunderstandings. In this paper, we seek to investigate and document the state-of-the-art in the research of “space” regarding its definition, classification, modelling and utilization (2D/3D) in spatial sciences and urban applications. We focus on positioning, navigation, building micro-climate and thermal comfort, landscape, urban planning and design, urban heat island, interior design and planning, transportation and intelligent space. We review 147 research papers, technical reports and on-line resources. We compare the presented space concepts with respect to five criteria—classification, boundary, modelling components, use of standards and granularity. The review inventory is intended for both scientists and professionals in the spatial industry, such as companies, national mapping agencies and governments, and aim to provide a reference to better understand and employ the “space” while working across disciplines.
1. Introduction
Space is an important notion in the human lexicon that aims to indicate physical or imaginary parts of living environments. WordNet, one of the largest lexical English databases provides nine meanings of the noun “space”, three of which are very relevant to this study [1]. Space is “the unlimited expanse in which everything is located”, “an empty area, usually bounded in some way between things” and “an area reserved for some particular purpose”. These three expressions clearly indicate the diversity in perceiving and describing space—empty or containing things, unlimited or bounded, physical or imaginary.
Most of the English dictionaries provide a more philosophical definition to reflect the fundamental importance of space to the understanding of the physical universe. Table 1 summarises the definitions found in seven dictionaries and lexical databases. As can be seen, four dictionaries consider space continuous, “boundless’’ and ”empty”. But space can also be perceived as portion of the space, such as space in a room. The definitions are not that explicit in specifying whether the spaces are empty or imaginary. The notion of limitless space is expressed by referring to its metrics in a three dimensional reference frame. The distinction between indoor and outdoor is introduced in a very intuitive way: the space inside of a structure (interior of a house, building, etc.,) is indoor space, while the space outside the structure is outdoor space.

Table 1.
The definitions of Space, Indoor and Outdoor from different resources.
In daily life, humans more often refer to portions of space such as areas or locations rather than universal unlimited space. Everyday expression such as “the space is packed with people”, “there is no space in this room”, “the kitchen space is spacious” suggest that the people tend to think of spaces as singletons (unique and self contained) enclosed by physical or imaginary boundaries. The singletons are assigned a broad spectrum of properties and these properties can range from personal to communal. Ashihara [2] argues that we can distinguish between bounded space and unbounded nature space, in which bounded space is considered to be positive space, since it is created to fulfil human (who use this space) intentions and functions while the unbounded nature space is negative. This paper embraces this human reference of space.
This approach is preserved when space is modelled by different disciplines in digital counterparts of real world. Researchers and developers discretize space into portions to be able to introduce useful properties, represent relations and visualise them [3]. Examples of such properties are weather conditions (temperature, humidity, wind), accessibility (accessible, partially accessible, non-accessible) or legal rights (right to cross, ownership). As the literature shows the portion of space has been referred to as to space unit, space cell or as just space. For the scope of this paper we will use the more formal notion of Cell when referring to a bounded portion of space.
Barriers such as walls, floors, ceilings are commonly used to create or separate indoor cells. Imaginary boundaries can be used to distinguish between space units outdoors for landscape planning. Combination of imaginary and physical boundaries can be used to partition spaces for leisure, drying laundry, growing plants [4], sheltering from the sun and wind [5] and similar activities [6,7,8]. Cells have been introduced in different disciplines related to urban applications (Figure 1, such as positioning and navigation [9,10,11,12,13,14,15,16,17,18,19,20,21] (indoor [22,23,24,25,26,27,28,29], outdoor [30,31,32]), building micro-climate and thermal comfort [4,33,34,35,36,37,38], landscape, urban planning and design [39,40,41,42,43,44], urban heat island [45,46,47], interior design [48,49,50], transportation [51,52,53,54] and intelligent space [55,56,57,58].
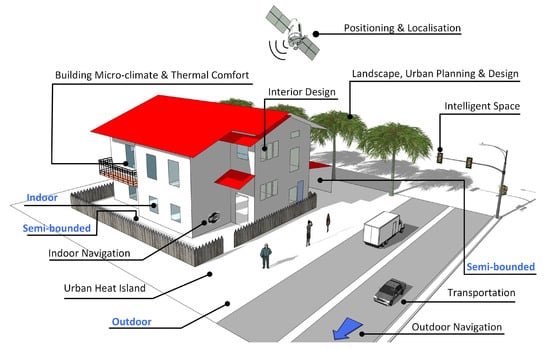
Figure 1.
The domains in spatial science and urban applications that introduced space.
However, disciplines may compose cells differently for the same environment, which can raise issues in referencing or addressing spaces. This paper is the first attempt to investigated the similarities, overlaps and differences while referring to spaces or portions of spaces in different fields. Therefore, we present the space concepts developed within the individual disciplines first and later we analyse and compare the finding. It should be noted that this paper concentrates on space definitions in the context of built environments and geographical space. Therefore, treatment of space in philosophy, mathematics, physics, cosmology, psychology and social sciences is out of the scope of this paper.
The remaining sections are organized as follows. Section 2 summaries definitions and classification of cells presented in different disciplines. Section 3 introduces cell representations. Section 4 discusses cell similarities, overlaps and differences in the eight disciplines. Section 5 concludes the review and proposes some directions for future work.
2. Definition and Classification
This section summaries definitions and classifications of space an portions of space presented in eight fields or disciplines, notably (i) navigation; (ii) positioning and localization; (iii) building micro-climate and thermal comfort; (iv) landscape, urban planning and design; (v) urban heat island; (vi) interior design and planning; (vii) transportation and (viii) intelligent space. All of them a closely related to urban applications.
2.1. Spaces in Navigation
Spaces in navigation have been classified as being located either indoors or outdoors. No strict definition for outdoor are found in the literature, except that people regard objects in open air as outdoor (assuming unbounded from above), such as streets, pavements, squares, rivers. In contrast, research dealing with indoor environments is more explicit with partitioning spaces into cells and attempts to provide formal definitions. For instance, References [3,24] defined the indoor space as a place bounded by physical boundaries (e.g., walls, floor, doors) and intended to support human activities [66]. Indoor space is often referred as to physically enclosed space. Underground enclosures, which offer platforms for human activities, are also referred to as indoor space [32]. Reference [67] presented an indoor space definition with the analogy to the human body. The body is a container bordered by the skin. Similarly, the wall, floor, roof, fence can be seen as the “skin". According to these definitions, semi-enclosed spaces such as a veranda or an inner court would be outdoor spaces. Indoor space in Reference [31] refers to building environment rather than natural. According to these authors, underground cavities (caves, natural passages) would be classified as to outdoor.
Only a few papers discuss semi-enclosed spaces that cannot be clearly attributed to indoor or outdoor. Examples are covered footbridges, sheds, balconies or partially roofed courtyards. Reference [17] defined these spaces as transitional spaces. Reference [68] suggested introducing quasi-indoors and quasi-outdoors but no strict definition is provided. For example, a courtyard surrounded by buildings is quasi-indoors, because the yard is an inseparable part of the surrounding building and should be included as part of the building’s indoor map to ensure continuity in navigation.
The research presented above is based on examples or human notions to clarify space. Reference [19] made the first attempt to develop a framework for formally distinguishing between spaces, depending on their construction characteristics and methodology to define cells. The authors defined space as “hollow (unoccupied)”, constrained by some partial (or complete) physical boundaries, where human activities can take place. In follow-up research [20,21], the authors introduced three construct elements (Top, Side and Bottom), which allows them to define strict rules for the classification. To quantify the space definitions, the authors proposed three more notions namely Closure, Physical boundary, Virtual boundary. Then spaces can be formally defined using side closure () and top closure (). Three thresholds (, and ) for and two ( and ) for allow to quantify the closure. Applying this mechanism, the authors classified the space for navigation as indoor (completely bounded), outdoor (unbounded) or semi-bounded (side-/top-bounded). Figure 2 illustrates the cases. Note, according to this framework, the courtyard from the above example [68] would be classified as semi-outdoor, because it is side-bounded. Although compatible the concepts still can lead to contradicting classifications if no strict definitions are provided.
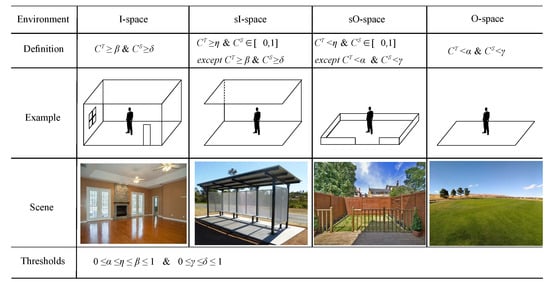
Figure 2.
Quantified generic space definition framework based on top closure () and side closure () [21]. On the basis of their visual inspection, they set the following ratio values for the five thresholds: , , , and .
2.2. Spaces in Positioning and Localization
The term “space” is utilised in positioning and localization to partition space and allow to distinguish between indoor, outdoor and semi-bounded cells from the sensor (e.g., GNSS ) reception perspective.
A typical example is the space classifications provided by Reference [15]. The authors used lightweight sensing service to analyse indoor/outdoor environments with respect to positioning options for mobile applications. They partitioned and classified space into indoor, semi-outdoor and outdoor (Figure 3a). The outside of a building is defined as outdoor, while inside is indoor. Close to or semi-open building space is considered as semi-outdoor. Reference [18] also provided a space classification according to the reception of the GPS signal as follows: open outdoors, semi-outdoors, light indoors and deep indoors. As shown in Figure 3b, areas which have an open sky condition (i.e., unbounded from above) and provide enough satellites for positioning are open outdoors. Areas such as urban canyon or wooded area, are classified as semi-outdoors. Light indoor is similar to semi-outdoor but inside the building. These are areas around windows, which still have some satellites availability. Deep indoors refer to places without any satellite coverage. Reference [69] developed a visual aid to the visually impaired person, in which they classified the navigation environments into three types, indoor, outdoor and semi-indoor. The criterion for this space partitioning is the type of signal received by the users, for instance, outdoor is the space which only can receive GPS signal, indoor is where ZigBee signal (communication protocol) is dominant and semi-indoor is the portion of space where both signals can be detected. Reference [70] defined indoor and semi-indoor spaces as GPS-denied environments.
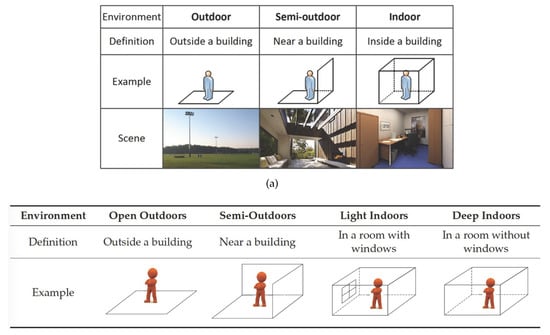
Figure 3.
Space classification and definitions by concerning sensor reception. (a) Space classification based on building [15]. (b) Space definition according to the reception of satellites signal [18].
Comparing the space definitions in research on navigation and localization, we can conclude that space is regarded in a similar manner, that is, portions of spaces are defined with respect to the built structures.
2.3. Spaces in Building Micro-climate and Thermal Comfort
Research in building micro-climate and thermal comfort largely utilises the concept of space and much emphasis is given on the transition between indoor and outdoor. Such sections of space are referred differently (e.g., semi-enclosed, semi-indoor, semi-outdoor, transition) with respect to their function or purpose. Without explicitly aiming at completely enclosed cells, the authors discuss possible bounding constructions. Many architectural design papers operate with such types of spaces to improve residential and building micro-climate and reduce cooling or heating energy requirements [4,5,71,72]. Typically, three main spaces are identified: semi-indoor, semi-outdoor and connection/transition/buffer and an attempt is made to provide definitions(Table 2).
Table 2.
Classifications and definitions of spaces between indoor and outdoor in the field of building micro-climate and thermal comfort.
As can be observed, the definition of semi-indoor space is related to the roof, because it can have a significant influence on the climate of the space. Reference [73] defined the covered space as a semi-indoor space, which is partially surrounded by indoor spaces. Reference [34] presented that a semi-indoor space can be created by using a special roof (Vela Roof) as cover to passively avoid uncomfortable (coldest and overheated) conditions, thereby reducing the energy demand significantly. Meanwhile, they defined space that is not entirely enclosed by walls, windows, doors and so forth. as outdoor. The semi-indoor space defined in the research [35] is a semi-indoor stadium, which has a roof that can be used to close the indoor volume to a relatively large extent. Thus, spectators and equipment are protected from wind, rain and snow. This space still has direct openings to the outside. In contrast, Reference [36] took the stadium as a semi-outdoor space in the assessment research of thermal comfort. In the research of condensation in residential buildings [4], semi-indoor spaces are created by installing external windows to balconies in Korean apartment units, which are used as environmental buffer spaces to improve comfort and reduce cooling and heating costs. In research on the impact of improved cook-stoves on indoor air quality in the Bundelkhand region in India, Reference [74] mentioned the kitchen with 3 walls is semi-indoor compared with outdoor (open-air) kitchen with a makeshift thatched roof for summer. Reference [37] showed the open space equipped with overhead shed are semi-indoor spaces, which can provide the citizens with sheltered space for public activities. In their research, they argued that illuminating such a huge semi-indoor space only by artificial lighting is against energy saving principle. Thus, they added lighting ducts to enable natural light to travel through the plate of the collector shed and reach the hall on the ground floor. In South Korea, traditional markets have been enclosed as semi-indoor by installing arcades along street edges to improve their physical environment [6], for instance, to alleviate inconveniences caused by inclement weather. Reference [38] considered semi-indoor and semi-outdoor spaces are two transitional spaces for thermal comfort. In their examples, a semi-outdoor space is covered by a fabric membrane while semi-indoor space is a studio of 8m high where its roof has 33% of zenital apertures for natural lightning.
In contrast, Reference [82] took the space, which is partially open towards the outdoor environment as a semi-outdoor space. They even reinforced the concept that outdoor space partly enclosed by a semi-transparent pitched roof (e.g., glass roof) is a semi-outdoor space in a later research [77]. Reference [83] defined the semi-outdoor as locations that, “while still being exposed to the outdoor environment in most respects, include human-made structures that moderate the effects of the outdoor conditions.” Examples include roofs acting as radiation shields or walls acting as vertical windbreaks. Reference [33] defined the semi-outdoors as exterior spaces that are sheltered and attached to the building. The authors also mentioned that an outdoor environment indicates a space without any covering to provide shelter and an indoor space refers to a naturally ventilated room, which is similar to the definitions in the positioning and navigation. The micro-climate of the semi-outdoor (partially enclosed space) usually has a lower effect of wind and is less hot than the outdoor [77]. Semi-outdoor spaces in Reference [84] are areas covered by large roofs, leaving a direct connection with the outdoor environment. Museums and cultural centre gardens, university campuses, shopping and leisure areas, hotels and resorts, are a few examples of building environments where covered semi-outdoor spaces are commonly integrated. In Reference [85], semi-outdoor spaces are defined as the spaces which are partly open in the direction of the outdoor. Three categories are introduced: inside the buildings such as entry atrium; covered spaces; shaded spaces, situated in an outdoor environment entirely. Covered streets are regarded in this category. Furthermore, semi-enclosed space [5,78] or semi-open space [79] are used to name the space that is not enclosed entirely and has some settings including human-made structures that moderate the effects of the outdoor conditions.
Some research offered the definitions only by examples. For instance, bus shelter is a semi-outdoor in Reference [86], because it can offer shelter in the form of a roof. The semi-outdoor space in Reference [87] refers to the internal architectural space with maximum exposure to the lobbies, corridors, atrium, courtyards, passages and verandas. In the research of building microclimate and summer thermal comfort in free-running buildings with diverse spaces, Reference [71] named the space between indoor and outdoor as semi-outdoor space with the example of the space combination of eave section and courtyard. Similarly, References [33,75] defined semi-outdoor as “exterior spaces that are sheltered and attached to the building". Balconies are regarded as shaded semi-outdoor spaces to provide the much needed thermal relief to the occupants of flats during the hot seasons [76].
2.4. Spaces in Landscape, Urban Planning and Design
The term of space is also employed in landscape, urban planning and design. Reference [44] defined the vegetation space unit by introducing two concepts: positive (solid) volume and negative (void) volume. From the view of landscape space generation, the space can be defined with the analogy to the building spaces. All plant materials are positive volumes that can be likened to architectural elements such as buildings or wall, while void spaces are enclosed or semi-enclosed volumes enclosed or surrounded by plant materials (left figure of Figure 4). On another hierarchical landscape cell, Reference [39] showed landscape spaces are created (enclosed) by the surrounding vegetations (e.g., trees, bushes) and named the space as “exterior room". Similar to the space in building environment, vegetation are architecturally used as structural materials (e.g., floors, ceilings, walls). Based on the type of enclosure, five types of spaces are formed: open, partially open, vertical, canopied and enclosed canopied (right figure of Figure 4).
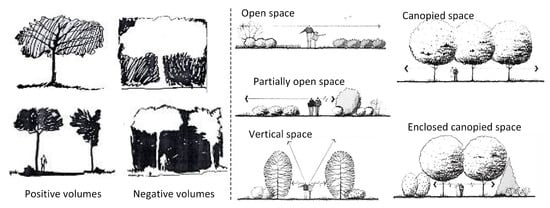
Figure 4.
Space generation, classification and definition in landscape. The left figure indicates the cognition of landscape spaces from the view of space generation [44]; the right figure shows the spaces created by plant materials [39].
Space in this field also can be interpreted as another important notion: unit. Defining a unit means that such an entity is distinguished from the background. A landscape is considered a unit if it is possible to delimit borders and assign a distinct function inside either a matrix or a mosaic of distinct landscapes. In such a way, the spatial scale referred to should be large enough to distinguish the units from the surroundings. Units are characterized by autopoietic properties. In fact, units are closed systems with the capacity to self-regulate and auto-maintain themselves. There are several empirical evidences that are in action inside a landscape (when considered as a unit), including feedback and auto-catalytic mechanisms. For instance, the ecotope can be considered as the simplest landscape unit [41]. The unit can differ by scale. The research on the basic unit types of landscape space can be divided into three types of scales, from small to large, respectively, vegetation space unit [39,44], space organization unit [40,88,89] and ecosystem unit [41]. Units are organized in the hierarchy of scale, that is small-scale space unit sets are contained by large-scale units [41].
In urban planning, public space has historically been described as “Public Open Space (POS)”, meaning the streets, parks and recreation areas, plazas and other publicly owned and managed outdoor spaces, as opposed to the private domain of housing and work [42]. In the process of landscape space design, four steps are needed [40]. In particular, (i) establish the composition space units; (ii) propose and confirm function demands; (iii) enclose spaces by vegetation characteristics to realise spatial conception; and (iv) realize the spaces by selecting vegetation species.
The boundary enclosure gives the space a sense of domain. A landscape space is considered a unit if it is possible to delimit borders [41]. Enclosure patterns are used to express features of the unit vertical boundary, on the view of vertical boundary enclosure degree [88], the number of sides enclosed [90] and enclosure morphology [89]. The aggregation, partition and separation of the vertical boundary composition material create an open-closed boundary, which makes external space enclosure not as completely as indoor environment enclosed by building components, such as walls and roofs [20]. Thus, another two classifications of spaces are proposed based on the boundary status and inner status of the space, including the number of sides [88] and patterns [89]. In particular, Reference [88] used the degree of enclosure to classify space that is the length of the perimeter enclosed by vertical boundaries. Then concluded that different degrees of enclosure result in spaces that vary in character from introverted to extraverted and four types of spaces are raised: four sides-introverted (360 degree), three sides-protected (270 degree), two sides-extraverted (90 degree) and object-focus (0 degree), see the left figure of Figure 5. Reference [89] classified the spaces into four types by insulting space enclosure patterns (□, ⊔, L and ‖) formed by vertical boundaries (right figure of Figure 5). Indeed, the aggregation, partition and separation of the vertical boundary composition material create an open-closed boundary. The discontinuous feature of landscape boundary makes the enclosure different from architecture spaces. From partly enclosed to fully enclosed, all enclosure types represent for a certain existing status of landscape space.
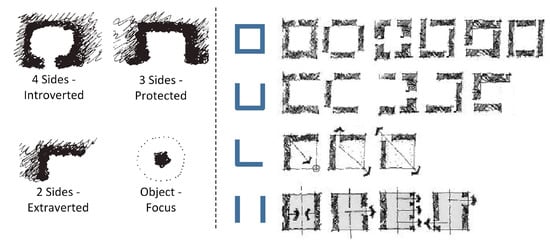
Figure 5.
Space classification based on the boundary status and inner status of the space. The left figure indicates the classification based on the number of sides [88]; the right figure shows the spaces classification based on four patterns [89].
2.5. Spaces in Urban Heat Island
Green space [91] or urban green space [92,93] are the notions related to space used in research of urban heat island (UHI). The UHI is an urban or metropolitan area that is significantly warmer than its surrounding rural areas due to human activities. The temperature difference is usually larger at night than during the day and is most apparent when winds are weak. It is one of the most obvious characteristics of urban climate, reflecting the impact of dense urbanization on urban environment. The formation of the city “heat island" is caused by a large number of artificial structures inside the city changing the thermal properties of the underlying surface and urban activities such as industrial production. Artificial structures such as asphalt and cement concrete have the characteristics of small heat capacity and fast heat absorption [91].
Urban green spaces are able to provide multiple ecological benefits, that is, support sustainable production of ecosystem services and foster urban resilience [94,95,96,97,98]. For instance, the reduction of rainfall run-off is important for sustainable urban development, particularly for cities experiencing severe flooding and water hazards [93]. Urban green spaces also ameliorate the climate; filter the air, water and soil of many pollutants; and provide habitats for fauna and flora [92]; and increases the biodiversity [99]. Reference [91] shows that green space can alleviate the heat island effect, due to the ecological benefits generated by plant physiological activities. Plants are able to absorb a large amount of heat and carbon dioxide from the environment and reduce the temperature of the ambient air by transpiration.
Therefore, spaces in UHI usually refer to (urban) vegetated/green spaces, which can be defined as areas partially or completely covered by grass, trees, shrubs and/or other vegetation in the form of parks, golf courses, forests, green roofs, streams, community gardens and yards. These spaces can effectively reduce temperature through shading and evapotranspiration [100,101,102,103,104]. Similar to Localisation, space in UHI are often partitioned into cells enclosed by non-physical boundaries derived from sensor measurements or land cover characteristics (i.e., greenery).
2.6. Interior Design and Planning
Space is one of the most important elements of interior design since it acts as a foundation where the entire interior design and planning is implemented. Interior design is the art and science of enhancing the interior space of a building to achieve a healthier and more aesthetically pleasing environment for the people using the space. More straightforward, it is the practice of space planning and designing interior spaces in homes and buildings, in which, creating floor plans, furniture layouts and designing the look and feel of a space are involved. Interior design also includes the specification of furniture, fixtures and finishes, and coordinating their installation. Therefore, it is a multifaceted profession that includes conceptual development, space planning, site inspections, programming, research, communicating with the stakeholders of a project, construction management and execution of the design. Interior designer implies that there is more of an emphasis on planning, functional design and the effective use of space, such as furnishings, colours, lighting, textures and materials [48,49,50].
Hence, it is essential that the designer is well aware of the space available, its dimensions and its utilities. The space planning is a process to find a balance between positive and negative spaces, in which a space that is essentially filled with “stuff” (e.g., furniture/decoration items) is a Positive Space and an “empty” space around and in between everything else is a Negative Space. The balance has to be maintained between the positive and negative spaces and either overcrowding or skimping on the stuff is going to affect it [105].
Space in interior design and planning refers to indoor space, which is bounded by/inside the physical boundaries of a building. Except the artificial components (e.g., wall, roof, ceiling, floor, door), furnitures and indoor vegetation, even some markers can act as boundaries for space planning. The physical 3D objects offer physical boundaries for the spaces while the objects like markers bring in imaginary boundaries.
2.7. Spaces in Transportation
The concept of space appears in transportation, where road space [106,107] is the most frequently mentioned. Transportation refers to movement of humans, animals and goods from one location to another and in which happen in the road space. A road space is designed to have traffic area and auxiliary traffic area (space) [108]. The former includes pedestrian pavements and vehicle lanes, while the latter can be further classified into grass areas and tree areas (Figure 6). Thus, specific spaces (areas) are planned and created to isolate people and vehicles although not all the spaces are bounded physically and almost always unbounded from above. The international standard CityGML provides an approach for digital representation of the transportation space and offers options to include other entities (CityFurniture, vegetation, waterbody, tunnel and bridge) as a part of the transportation spaces. Other standards such as Land and Infrastructure (LandInfra) or IFC have their own approach in handling digital representations of transportation space.
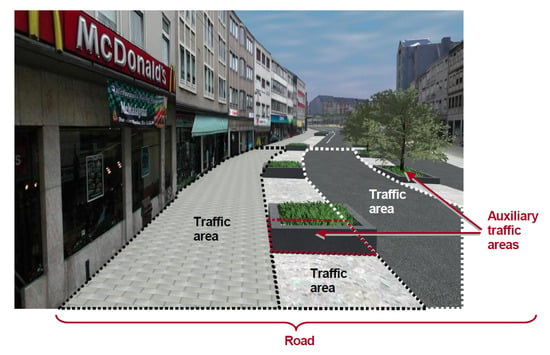
Figure 6.
Example of a road (space) in LOD2 in CityGML, which is the aggregation of traffic areas and auxiliary traffic areas [108].
Road space is a general name of all spaces used for transporting. In addition to the engineering names (traffic and auxiliary traffic) mentioned above, it is further planned/subdivided based on diverse transportation options, typically including walking, cycling, public transit and auto-mobile and accounts for land use factors that affect accessibility [109]. In other words, spaces in transportation include walking space, cycling space, public transit and auto-mobile space, as well as the isolation zones.
Another type of space considered in transportation is parking space, such as finding public parking spaces [110,111,112,113,114] in parking lot [115], on-street parking spaces [116,117] or managing parking spaces [118]. The space used here means the place where people can park their cars. As for the space classification, it entirely depends on the place itself, that is, it can be an indoor, outdoor, semi-indoor or semi-outdoor space.
2.8. Intelligent Space
In the last decades, the concept of intelligent spaces has been gaining much interest. Intelligent spaces are environments that can continuously monitor what is happening in them, communicate with their inhabitants and neighbourhoods, make related decisions and act on these decisions [51,55,56,57,58]. Intelligent spaces can be built to augment human capability to sense and make sense of the physical world [58]. In the research of cooperation between intelligent spaces and robots, Reference [119] defined the intelligent spaces as rooms or areas that are equipped with sensors (e.g., microphones, cameras) that enable them to perceive what is happening in them. In such spaces that have an intelligence of their own a world model no longer is something the robot has alone but a service offered by the information infrastructure of the space. In this respect, the portion of space that belongs to the intelligent spaces is a completely artificial partition, in which certain communications and functions of interconnected systems are provided even without human interaction. Such portions of spaces might include or aggregate several of the above discussed spaces.
For example, intelligent transportation spaces (ITSp) is one of the most prominent contemporary examples. ITSp was developed to lead the effort toward a cyber-physical-social system to further improve the vehicles, traffic and transportation safety, efficiency and sustainability [53,54]. Not only various intelligent transportation system (ITS) modules but also pedestrians, vehicles, roadside infrastructures, traffic management centres, sensors and satellites are integrated in it [54]. The entire constellation would behave like intelligent agents travelling in portions of spaces. The argument behind partitioning space into intelligent transportation cells is driving safety, transport efficiency and comfort that accrue from increased traffic information, reduced driving loads, and improved route management [53].
Intelligent spaces cannot be attributed to one discipline, rather they expected to be container of a broad range of applications (such as in homes, offices, factories, etc.). The concept of space partitioning is least specific and resamples the notion of space as physical universe. However, the notion of intelligent space is helpful in defining the scope of smart city [120]. A typical characterising of intelligent space is that the digital representation cannot be isolated from the physical environment. It need agents in the physical world to carry out actions [121]. Therefore, the intelligent space can be regarded as a container of digital and physical environments in which different things are connected by ad hoc networks (Figure 7). Intelligence means that agents obtain intelligence from the system embedded in it, rather than the space controlled by a human [51].
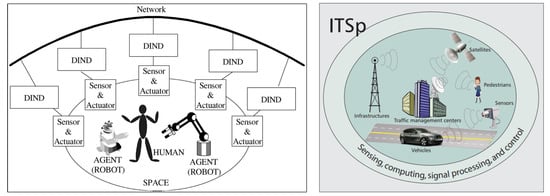
Figure 7.
Conceptual figure of intelligent space and intelligent transportation space. The left figure shows intelligent space [51,55], in which the DIND means Distributed Intelligent Network Device; the right figure is the intelligent transportation space [54].
3. Spaces Representation
Space in digital world is an abstract expression of the specific properties of environment and therefore is discretized into cells. To be able to manage, analyse and visualise the space, geometric representations are applied. For instance, in research such as positioning and navigation, building micro-climate and thermal comfort and landscape, spaces are abstracted and represented using Boundary Representation (BRep) [122], Constructive Solid Geometry (CSG) [123] or Spatial Occupancy Enumeration [124]. While appropriate for realistic visualisation, Boundary representation can fall short in performing spatial operations as volume validation and computation. Therefore, for many applications Spatial Occupancy Enumeration (e.g., voxels [125,126]) can be seen as alternative [127,128]. There is no strict pattern which geometric representation is employed in different disciplines. It many cases, the geometry used depends on the geometric expressions of the modelling software, that is, GIS or CAD. Although spaces are often visualised, there are cases where “space" is just a perception. For example, intelligent transportation spaces are given as abstract concepts and we have not found evidences that they have been explicitly represented with geometry.
3.1. Examples of Space Geometric Representations
Spaces in indoor navigation and interior design are generally modelled as 3D volumes. A formal definition is 3D hollow parts bounded by physical or imaginary (non-existing) elements [23]. Many researchers have used 3D geometric representations for space-based navigation model such as IndoorGML [129] (Figure 8), multilayered space-event model [130], and 3D object based navigation [131]. 3D spaces are often used to derive a navigation network with the support of Poincaré duality theory [132]. Nodes in the network are associated with spaces units, which can also represent landmarks or decision points, and edges between them represent the connectivity between spaces. Moving from one node to another is allowed only when there is an edge between them. Commonly cost of edges indicates distance or travel time between nodes [133] and nodes can contain semantic information about the location (name, type, description, etc.).
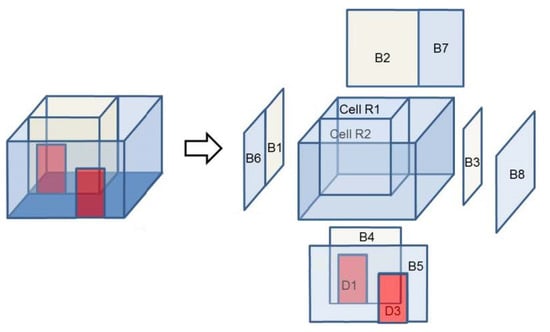
Figure 8.
Example of the indoor 3D space modelling in IndoorGML [129].
Reference [134] proposed an approach to extract 3D indoor spaces in complex building environments based on indoor space boundary calculation, which includes three steps: the Boolean difference for single-floor space extraction; relationship reconstruction; and cross-floor space extraction. In the research of semi-indoor (top-bounded) space [20] for navigation, the authors employed Top, Side, and Bottom to represent a top (e.g., roof, shelter), side (e.g., wall), and bottom (e.g., ground, floor) structure respectively to represent (imaginary or physical) boundaries for 3D spaces (Figure 9). They also proposed a projection-based approach to generate this kind of 3D space automatically. Currently, there is no research on semi-outdoor space modelling (generation).
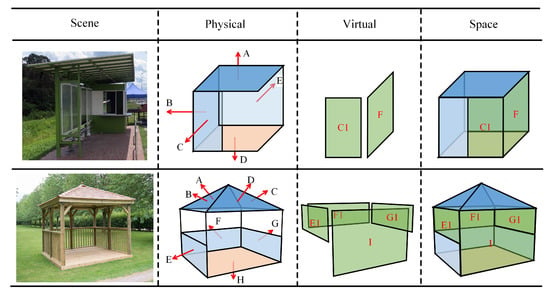
Figure 9.
Example of the semi-indoor (top-bounded) space modelling based on 3D geometric representations [20].
Landscape spaces are also represented by geometric representations, in which boundaries are constructed by surrounding planes, including ground plane, vertical plane, and overhead plane [39]. As seen in Figure 10, treetops of arbours act as overhead planes, bushes as vertical planes, and ground/terrain as the ground plane. This modelling approach is similar to the method of building space modelling mentioned above. It means that the ground plane, vertical plane and overhead plane can correspond to Bottom, Side, and Top respectively.
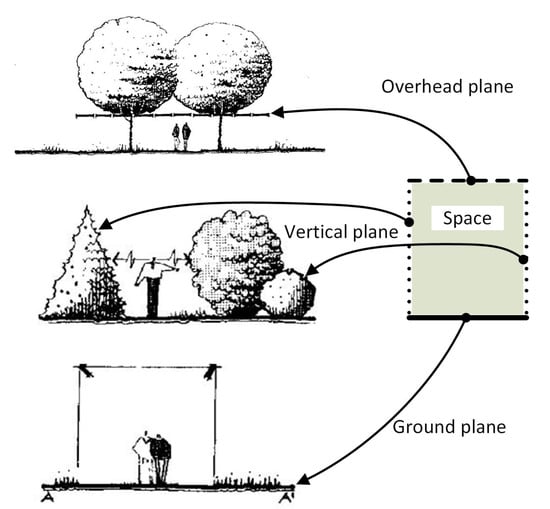
Figure 10.
Example of geometric modelling of space in the landscape. Adapted from the figures in Reference [39].
In the building micro-climate and thermal comfort, indoor, outdoor, semi-indoor/semi-outdoor notions are widely used to represent spaces but the geometric representation is not that explicit. This can be partly explained by the fact that, on one hand, definitions of these spaces are notion-based or example-based only, and on the other hand, factors (e.g., temperature, humidity, wind speed, and solar intensity) are the main characteristics. Yet, considering the spaces are the similar to those used in navigation, we deem it possible to apply the same modelling approach as in navigation.
Almost in all outdoor related research fields (such as landscape, urban planning and design, urban heat island, transportation), outdoor spaces are represented as 2D surfaces as they are naturally unbounded in the Z direction. Only few research papers considered outdoor spaces as 3D and applied 3D geometric approaches. References [135,136] report a model to subdivide continuous urban spaces into convex and solid voids (3D volumes) for analysis and classification based on physical measures, in which outdoor is roughly classified as urban void and the subdivision procedure is conducted based on convex polygon. Reference [137] proposes a versatile data model for analysing urban architectural void, in which space compartmentalization is conducted based on Gestalt theory and its model can be rendered both as a 2D and 3D representation.
3.2. Spaces Maintained in International Standards
The concept of space is maintained in several international standards, the most well-known of them probably being Industry Foundation Classes (IFC) standard [138], in which the space is an area or a volume that is bounded by physically or imaginary elements. Spaces are intended to describe certain functions of the building. Commonly, a space in the IFC standard is associated with a building/building storey, which indicates that the space is interior. However, it can also be associated with a construction site, case in which that space is exterior. The space definition in BIM serves therefore for a large number of purposes including calculations of energy use, acoustic analysis, navigation, orientation within the building, egress simulations. Property measurement, valuation-related and FM related standards define various types of interior areas and volumes [139]. These different types of area and volume definitions show various different interpretations of interior spaces in the domain of property and facility management.
The standard IndoorGML [129] is an Open Geospatial Consortium (OGC) standard for an open data model and XML schema for indoor spatial information, which aims to provide a common framework for representation and exchange of indoor spatial information based on 3D spaces. IndoorGML defined the space as a space cell that is bounded by architectural components, which is similar to the common understanding that indoor space is inside buildings (such as a house or a commercial shopping centre), where people usually behave in. IndoorGML allows to maintain different partitions of space via the Multi-Layer Space Model concept. Space subdivisions can be organised as Topographic Space Layer, Sensor Space Layer, Access Space Layer and so forth.
CityGML [108] is an open data model and XML-based format for the storage and exchange of virtual 3D city models. CityGML provides a generic semantic, attributes and relations of a 3D city model. This is especially important for cost-effective sustainable maintenance of 3D city models, allowing reuse of data in different application fields. In this standard, a large number of indoor and outdoor physical entities are given digital representations. The current version 2.0 of CityGML, spaces are not explicitly mentioned but notations as rooms, doors, windows, being represented as volumes indicate that indoor spaces are critical. Discussions on introducing spaces as generic class in CityGML 3.0 are on-going.
Land Administration Domain Model (LADM) is a conceptual model that deals with properties in a wide range of applications related to land administration [140,141]. The LADM standard is based on the generic concept of spatial unit and an administrative entity, which is subject to registration (by law). A spatial unit can follow physical boundaries but can also be bounded by abstract boundaries, which identify legally defined RRRs (rights, responsibilities or restrictions). The spatial unit can be used to represent both indoor (strata) and outdoor (parcel) properties as included in land administration systems. A spatial unit can be described by two-dimensional (2D) or three-dimensional (3D) geometry or even by textual descriptions and can be linked to other space standards such as IndoorGML [142,143,144].
3.3. Discussion
Space is commonly perceived as having three-dimensions [145] and many of the above mentioned disciplines progressively attempt to advance the digital space representations to 3D. Research in indoor navigation is a typical example, although the number of true 3D applications is still limited. Some concepts of indoor space-based approaches have been attempted to be extended for outdoor, however, outdoors specification of space units requires further investigation [21].
Almost all reviewed disciplines attempt to create cells but the formal approaches for enclosing spaces are very limited. Space partitions in building micro-climate and thermal comfort are modelled in compatible manner as those mentioned for positioning and navigation, that is, most of the approaches define cells as 3D volumes. In landscape, urban planning and design, there are two ways to model the cells: one is model them by finding their overhead plane, vertical plane, and ground plane; another one is finding outlines of spaces on the ground and using them as boundaries to represent spaces in 2D. Cells in urban heat island and transportation share the same modelling approach as in landscape, urban planning and design, which is more similar to the second method, that is, determining their outlines in 2D and rarely considering 3D. The spaces used to investigate urban heat island mainly refer to urban green spaces. Currently, the enclosure of these cells is based on land use boundaries. The space modelling process in the interior design and planning discipline is similar to the one in indoor space modelling.
Transportation spaces are mostly perceived as 2D. CityGML provides geometrical descriptions by 2.5D surfaces [108]. Based on the shape, city objects can be classified as Volumetric object (e.g., buildings) and Surface object (e.g., streets, roads, pass-ways, squares) [146,147]. Surface objects and urban voids (formed by volumetric objects) are generally outdoor. When it refers to outdoor space boundaries determination, the literature discusses mainly urban space analysis. Among the several approaches proposed, the most notable one is the Space Syntax [148]. It converts outdoor into discrete configurations based on viewshed, axial space and convex space, which are then represented subspaces as maps and graphs that describe the relative connectivity and integration of those spaces. Reference [149] represented spaces with the axial lines based on the concepts of isovists and medial axes in 2D.
Intelligent space is the most abstract concept of all and does not currently have a digital representation. As mentioned previously, it is the abstract space in which sensors and environment can communicate. If it is a room equipped with sensors, the intelligent space is the room itself [150]; if it is a certain area of the room, the space becomes the area [121]. Therefore, the intelligent space can be modelled based on the physical space where the equipment is installed.
4. Similarities, Overlaps and Differences of Spaces in Different Fields
It is pointless to constrain people from different domains to use the same concepts and terms for spaces but it is recommendable to provide a formal definition with robust mechanism for creating the specific for a discipline cells. The formalism will help to harmonise the concepts and establish mapping rules that will facilitate re-use of information from diverse disciplines and fields.
4.1. Overview of All Spaces
As seen in Figure 11, indoor, semi-bounded, and outdoor spaces are defined and employed as the basic carriers of all fields related spatial science and urban applications. Navigation and positioning covers all the three types of spaces. The semi-bounded spaces are mostly involved in building micro-climate and thermal comfort. The interior design and planning is focussed mostly on indoor environments and therefore indoor spaces are used. The research focusing on outdoor space is very extensive, even some types of space have become a subject of research by themselves. For instance, road space is a part of outdoor but, at the same time, it is the subject of the transportation. Outdoor vegetation space in urban area is generalized as green area, which is the protagonist of urban heat island. Landscape, urban planning and design mainly focus on spaces in outdoor.
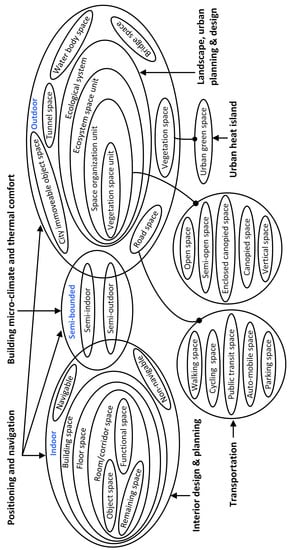
Figure 11.
Overview of spaces from different fields.
4.2. Space Comparison
We compared space units introduced in different domain with respect to five criteria: space classification, boundary composition material, modelling components, adapted standards, and granularity (Table 3), in which the blank items means the contents are not specified.
Table 3.
Space comparisons in different domains.
4.2.1. Classification
The space classifications and definitions vary with respect to disciplines and fields. Most of them are notion-based or example-based. Therefore, it is difficult to cover all cases an application may face and may bring some contradictions and ambiguities. For instance, indoor and outdoor are shared space notions in all disciplines. While the definitions about indoor and outdoor are somehow compatible, still differences may occur. For example, some indoor definitions exclude enclosed spaces such as caves and mines, because the definitions explicitly name the enclosing boundaries walls, doors, ceilings, windows), which are not typical for natural environment.
The indoor and outdoor definitions in positioning and localization are aligned to the common definitions in navigation but reviewed definitions fail short when spaces are semi-bounded. For example, a gas station is neither an indoor nor an outdoor space; it might be seen as a semi-indoor or semi-outdoor space or could remain unclassified according to the definitions discussed in References [15,18].
Spaces formed by vegetation are shared by the landscape, urban planning and design and urban heat island but spaces in the former have a more extensive classification based on space boundaries while the latter takes the spaces directly as urban green spaces. Interior design and planning works on indoor space, even the classification from navigation (functional space, remaining space, and object space) is still applicable. Spaces in transportation mainly include the road spaces but based on different agents, such as pedestrian, cyclist, diver, the road spaces can be further classified into walking space, cycling space, public transit space, auto-mobile space and parking space. Based on the definition of intelligent space, it is easy to understand that all the spaces with different classification can be used in this field. With the interpretation of space and the refinement of research, even the same spaces are evolved into different categories.
4.2.2. Physical Boundary and Modelling Components
Throughout all the research fields, there are only two kinds of materials for space boundary composition, one is man-made and the other is natural. Man-made components are normally used for built environment space creation, such as wall, floor or roof for indoor space creating. In comparison, the natural components are mainly vegetation, such as trees, bushes, and grass, which are normally used to enclose outdoor spaces.
For the purpose of working with unified constructs, some researchers proposed generic terms. For instance, in navigation terms such as Top, Side, and Bottom are proposed by Reference [21] while Overhead plane, Vertical plane, and Ground plane are introduced in landscape, urban planning and design [39]. Comparing spaces in these two fields, we can conclude that the space generation and modelling approach are similar, although the elements for space generation are different. The terms can be aligned as follows: Top to overhead plane, Side to vertical plane, and Bottom to ground plane. The types of formed spaces are similar, that is, outdoor (open), semi-outdoor (partially open and vertical), semi-indoor (canopied), and indoor (enclosed canopied). These two fields complement each other in artificial spaces and natural spaces.
As mentioned above, spaces defined in interior design and planning are all indoors, the boundary is also made up of man-made objects, which can be also related to the once used in indoor navigation. In urban heat island, the boundary is vegetations while modelling component is ground (terrain) only. Transportation has the modelling component as that of urban heat island but the boundary can be both man-made and natural. The boundaries that are used in green areas, can be the same as isolation zones in transportation. The differences come from man-made boundaries of spaces, such as tarmac road, concrete road.
4.2.3. Relevant Standards
The use of standards is specifically important as standards aim to provide formal definitions and in many cases strict rules or guidelines for defining spaces. The standards also provide a rules to apply geometry to describe the spaces. Comparing the space notions from the perspective of adapting standards, we can conclude that several standards that maintain the concepts of space can be used by many of the discussed disciplines. Especially good example is CityGML as it covers many of the spaces. The present CityGML 2.0 does no provide a specific expression for space units but it will include space notions in the follow-up CityGML 3.0. LADM can also be used to provide space formalism for many of the disciplines with some exceptions such as applications related to urban heat island. IndoorGML and IFC are undoubtedly very useful in research fields related to indoor spaces, such as indoor positioning and navigation, interior design and planning, indoor intelligent space.
4.2.4. Granularity
Granularity is another important aspect, as spaces themselves are extensible and researchers assign them semantics based on their scale and/or level of detail and reflecting the purpose of discretization.
In indoor navigation and interior design and planning, a building (or building blocks) is observed as the largest granularity. A finest granularity is floor, room, corridor or event part of room. Several frameworks are developed for further refine the granularity. Reference [24] suggested subdivision into object space, functional space, and remaining space. Reference [29] introduced the Flexible Space Subdivision framework (FSS) that allows to automatically identify the spaces in the smallest granularity. In this framework, the authors distinguished between objects based on the basis of their mobility (ability to change independently their location) into three types (static, semi-mobile, and mobile). And then, the indoor space (environment) was subdivided as object-space, functional-space, and remaining-space. Specifically, object-space is the subspace occupied by semi-mobile objects, which is non-navigable; Functional-space is the subspace dedicated to the usage of semi-mobile objects or activities of mobile objects; it is navigable under conditions; Remaining-space is the space available for navigation, which is freely navigable. Another way of interpretation indoor granularity in indoor navigation is that the coarsest granularity is indoor space, then it is further subdivided into two types of finest granularity: navigable and non-navigable space [3,81].
The outdoor space is commonly considered of consisting of cells using names such as city object space, water body space, tunnel space, vegetation space, bridge space, and road space, which is the finest granularity in positioning and localization. At a coarser granularity, city can be formed by combining all of the basic spaces. In transportation, road space is the coarser level of granularity, it can be further subdivided and defined into five types of cells based on the types of users, including walking space, cycling space, public transit space, auto-mobile space, and parking space.
In landscape, urban planning and design, the finest granularity of a cell is vegetation space unit (positive and negative volume in Reference [44]). With several basic units, space organization unit can be created, which includes five types of spaces: open, semi-open, vertical, canopied, and enclosed canopied. Aggregation space organization units, a course higher level of space - ecosystem space unit, will be formed. All spaces in landscape are collectively referred to as ecological system, which is the coarsest granularity of the space in this field.
4.3. Summary
Cells in navigation and localisation are similar, which mainly refer to cells formed by man-made structures. The difference comes from the geometric representation. While cells in navigation are represented and maintained digitally with appropriate geometry, those in positioning have only been described based on perception.
Cells in building micro-climate and thermal comfort, and navigation are also quite compatible. Both disciplines operate in indoor spaces, which are formed by the same architectural components. Therefore, both fields can share the same space notions and boundary constructs. While, indoor and outdoor spaces are well investigated in navigation, semi-bounded spaces are better addressed in research on building micro-climate and thermal comfort. Re-using and adapting space concepts and methodology for enclosing cells is beneficial and will lead to an unified classification indoor space.
Transportation spaces and landscape spaces are mainly outdoor. The space partitioning of the former is based on man-made boundaries, while the latter uses space concepts that depend on natural boundaries (vegetation). But if cells have to created for an entire city, both transportation and landscape cells need to be aligned and used simultaneously. A very typical examples is urban planning, where the first step would be to identify areas for transportation and parks and continue with further refinements but considering adapting the space modelling in both disciplines to achieve the most favourable option to human mobility and activities.
5. Conclusions
This paper provides a review of the current status of modelling and using space in spatial science and urban applications. We have shown that the concept of space is currently being used in different domains, disciplines and fields for diverse purposes. We compared the space modelling approaches in several urban applications with respect to the manner in which they are defined and classified, the environments they are abstracted/modelled, the way boundaries are created and their granularity. We discussed similarities, overlaps, and differences in eight research fields namely navigation, positioning, building micro-climate and thermal comfort, landscape, urban planning and design, urban heat island, interior design, transportation, and intelligent space. Clearly, the notion of space is gaining attention. An increasing number of applications and standards are working towards three-dimensional notions to be able to represent parts of space. The space is being discretized in varying manners according to the application, but still, many similarities exist between the investigated disciplines. This is a strong indication that research on space modelling should evolve to cross-disciplinary, which will contribute to establishing formal definitions as well as rule-based approaches for forming space cells. The cross-discipline discussions on definition may allow to agree on a generic space concept, which can be included in standards and used as basis for discipline-dependent purposes.
Our analysis has revealed interesting patterns in the current process of defining cells. The notion- based or example-based is the main approach for space classification and definition. A limited number of papers have attempted a quantitative (parameter-based) method. There is a need for more formal frameworks, in which rules and thresholds will guide creating, using and analysing space proportions in multiple disciplines. Many of the space parameters defined in one fields can then be adapted for or translated to the other field. As mentioned in the review, landscape architecture, navigation and positioning may share the same methodology to define cells. Another observation is that the approaches to model indoor space are much more refined and elaborated compared to the outdoor approaches. Researchers that work in outdoor space, supported by the international standards, are quickly moving towards 3D representations of physical objects but hardly consider the modelling of 3D spaces. This delays the development of seamless indoor-outdoor applications (e.g., navigation of pedestrians) or 3D spatial analysis for environmental analysis (e.g., urban heat island) [151,152,153,154,155]. The difference between indoor and outdoor space can be reduced if compatible approaches for space modelling are applied both indoors and outdoors. For example, the outdoor space, although unlimited from above, can still be modelled as a 3D volumes like CellSpace [129] in indoor navigation. Such an approach will simplify the management of information and will create a platform for enabling seamless indoor-outdoor navigation. Similar directions can be taken in other disciplines where the human activity or environmental phenomena does not stop at the door of the building.
Author Contributions
Concept and methodology, Sisi Zlatanova; formal analysis, Sisi Zlatanova; investigation, Jinjin Yan, Yijing Wang, Abdoulaye Diakite; resources, Jinjin Yan, Yijing Wang; data curation, Sisi Zlatanova, Abdoulaye Diakite; writing–original draft preparation, Jinjin Yan, Yijing Wang, Sisi Zlatanova; writing–review and editing, Umit Isikdag, George Sithole, Jack Barton; visualization, Jinjin Yan; supervision, Sisi Zlatanova; project administration, Sisi Zlatanova. All authors have read and agreed to the published version of the manuscript.
Acknowledgments
We are grateful to the reviewers, researchers and practitioners who have contributed to this paper with ideas, discussions and figures.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Miller, G.A. WordNet: A lexical database for English. Commun. ACM 1995, 38, 39–41. [Google Scholar] [CrossRef]
- Ashihara, Y. Exterior Design in Architecture; Van Nostrand Reinhold Company: New York, NY, USA, 1981. [Google Scholar]
- Zlatanova, S.; Liu, L.; Sithole, G.; Zhao, J.; Mortari, F. Space Subdivision for Indoor Applications; GISt Report No. 66; Delft University of Technology, OTB Research Institute for the Built Environment: Delft, The Netherlands, 2014. [Google Scholar]
- Kim, J.; Kim, T.; Leigh, S.B. Double window system with ventilation slits to prevent window surface condensation in residential buildings. Energy Build. 2011, 43, 3120–3130. [Google Scholar] [CrossRef]
- He, J.; Hoyano, A. Measurement and evaluation of the summer microclimate in the semi-enclosed space under a membrane structure. Build. Environ. 2010, 45, 230–242. [Google Scholar] [CrossRef]
- Kim, K.; Park, S.; Kim, B.S. Survey and numerical effect analyses of the market structure and arcade form on the indoor environment of enclosed-arcade markets during summer. Sol. Energy 2008, 82, 940–955. [Google Scholar] [CrossRef]
- Nasir, N.H.M.; Salim, F.; Yaman, M. The potential of outdoor space utilization for learning interaction. In UMRAN2014: Fostering Ecosphere in Built Environment, International Islamic University Malaysia; Kulliyyah of Architecture and Environmental Design: Selangor, Malaysia, 2014; pp. 1–17. [Google Scholar]
- Lin, T.P. Thermal perception, adaptation and attendance in a public square in hot and humid regions. Build. Environ. 2009, 44, 2017–2026. [Google Scholar] [CrossRef]
- Werb, J.; Lanzl, C. Designing a positioning system for finding things and people indoors. IEEE Spectr. 1998, 35, 71–78. [Google Scholar] [CrossRef]
- Li, K.J. Indoor space. In International Symposium on Web and Wireless Geographical Information Systems; Springer: Shanghai, China, 2008; pp. 1–3. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Graph model based indoor tracking. In Proceedings of the 2009 Tenth International Conference on Mobile Data Management: Systems, Services and Middleware, Taipei, Taiwan, 18–20 May 2009; pp. 122–131. [Google Scholar]
- Jensen, C.S.; Lu, H.; Yang, B. Indoor—A New Data Management Frontier. IEEE Data Eng. Bull. 2010, 33, 12–17. [Google Scholar]
- Worboys, M. Modeling indoor space. In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Chicago, IL, USA, 3–5 October 2011; pp. 1–6. [Google Scholar]
- Baniukevic, A.; Sabonis, D.; Jensen, C.S.; Lu, H. Improving Wi-Fi based indoor positioning using bluetooth add-ons. In Proceedings of the 2011 IEEE 12th International Conference on Mobile Data Management, Lulea, Sweden, 6–9 June 2011; Volume 1, pp. 246–255. [Google Scholar]
- Zhou, P.; Zheng, Y.; Li, Z.; Li, M.; Shen, G. Iodetector: A generic service for indoor outdoor detection. In Proceedings of the 10th acm conference on embedded network sensor systems, Toronto, ON, Canada, 6–9 November 2012; pp. 113–126. [Google Scholar]
- Baniukevic, A.; Jensen, C.S.; Lu, H. Hybrid indoor positioning with wi-fi and bluetooth: Architecture and performance. In Proceedings of the 2013 IEEE 14th International Conference on Mobile Data Management, Milan, Italy, 3–6 June 2013; Volume 1, pp. 207–216. [Google Scholar]
- Kray, C.; Fritze, H.; Fechner, T.; Schwering, A.; Li, R.; Anacta, V.J. Transitional spaces. In International Conference on Spatial Information Theory; Springer: Scarborough, UK, 6 September 2013; pp. 14–32. [Google Scholar]
- Wang, W.; Chang, Q.; Li, Q.; Shi, Z.; Chen, W. Indoor-Outdoor detection using a smart phone sensor. Sensors 2016, 16, 1563. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. An extraction approach of the top-bounded space formed by buildings for pedestrian navigation. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, 4. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S.; Aleksandrov, M. Top-Bounded spaces formed by the built environment for navigation systems. ISPRS Int. J. -Geo-Inf. 2019, 8, 224. [Google Scholar] [CrossRef]
- Yan, J.; Diakité, A.A.; Zlatanova, S. A generic space definition framework to support seamless indoor/outdoor navigation systems. Trans. GIS 2019, 23, 1273–1295. [Google Scholar] [CrossRef]
- Mulloni, A.; Wagner, D.; Barakonyi, I.; Schmalstieg, D. Indoor positioning and navigation with camera phones. IEEE Pervasive Comput. 2009, 8, 22–31. [Google Scholar] [CrossRef]
- Isikdag, U.; Zlatanova, S.; Underwood, J. A BIM-Oriented Model for supporting indoor navigation requirements. Comput. Environ. Urban Syst. 2013, 41, 112–123. [Google Scholar] [CrossRef]
- Zlatanova, S.; Liu, L.; Sithole, G. A conceptual framework of space subdivision for indoor navigation. In Proceedings of the Fifth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Orlando, FL, USA, 5 November 2013; pp. 37–41. [Google Scholar]
- Krūminaitė, M.; Zlatanova, S. Indoor space subdivision for indoor navigation. In Proceedings of the sixth ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Fort Worth, TX, USA, 4–7 November 2014; pp. 25–31. [Google Scholar]
- Brown, G.; Nagel, C.; Zlatanova, S.; Kolbe, T.H. Modelling 3D topographic space against indoor navigation requirements. In Progress and New Trends in 3D Geoinformation Sciences; Springer: London, UK, 2013; pp. 1–22. [Google Scholar]
- Liu, L.; Zlatanova, S. A two-level path-finding strategy for indoor navigation. In Intelligent Systems for Crisis Management; Springer: London, UK, 2013; pp. 31–42. [Google Scholar]
- Kim, K.; Wilson, J.P. Planning and visualising 3D routes for indoor and outdoor spaces using CityEngine. J. Spat. Sci. 2015, 60, 179–193. [Google Scholar] [CrossRef]
- Diakité, A.A.; Zlatanova, S. Spatial subdivision of complex indoor environments for 3D indoor navigation. Int. J. Geogr. Inf. Sci. 2018, 32, 213–235. [Google Scholar] [CrossRef]
- Giudice, N.A.; Walton, L.A.; Worboys, M. The informatics of indoor and outdoor space: A research agenda. In Proceedings of the 2nd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, San Jose, CA, USA, 3–5 November 2010; pp. 47–53. [Google Scholar]
- Yang, L.; Worboys, M. A navigation ontology for outdoor-indoor space:(work-in-progress). In Proceedings of the 3rd ACM SIGSPATIAL International Workshop on Indoor Spatial Awareness, Chicago, IL, USA, November 2011; pp. 31–34. [Google Scholar]
- Yang, L.; Worboys, M. Similarities and differences between outdoor and indoor space from the perspective of navigation. In Proceedings of the Poster at COSIT, Belfast, ME, USA, 12–16 September 2011. [Google Scholar]
- Hwang, R.L.; Lin, T.P. Thermal comfort requirements for occupants of semi-outdoor and outdoor environments in hot-humid regions. Archit. Sci. Rev. 2007, 50, 357–364. [Google Scholar] [CrossRef]
- Van Timmeren, A.; Turrin, M. Case study ‘the Vela Roof–UNIPOL’, Bologna: use of on-site climate and energy resources. WIT Trans. Ecol. Environ. 2009, 121, 333–342. [Google Scholar]
- Van Hooff, T.A.J.; Blocken, B. Computational analysis of natural ventilation in a large semi-enclosed stadium. In Proceedings of the 5th European and African Conference on Wind Engineering, Florence, Italy, 8–12 November 2009; Firenze University Press: Florence, Italy, 2009; pp. 1–11. [Google Scholar]
- Bouyer, J.; Vinet, J.; Delpech, P.; Carré, S. Thermal comfort assessment in semi-outdoor environments: Application to comfort study in stadia. J. Wind. Eng. Ind. Aerodyn. 2007, 95, 963–976. [Google Scholar] [CrossRef]
- Liu, X.H.; Chen, Q.Y.; Liu, H.; Yu, H.; Bie, F.Y. Urban solar updraft tower integrated with hi-rise building-case study of Wuhan new energy institute headquarter. In Solar Updraft Tower Power Technology; Trans Tech Publications: Stäfa, Switzerland, 2013; pp. 67–71. [Google Scholar]
- Monteiro, L.M.; Alucci, M.P. Transitional spaces in São Paulo, Brazil: Mathematical modeling and empirical calibration for thermal comfort assessment. Build. Simul. 2007, 737–744. [Google Scholar]
- Booth, N.K. Basic Elements of Landscape Architectural Design; Waveland Press: Long Grove, IL, USA, 1989. [Google Scholar]
- Austin, R.L. Elements of Planting Design; John Wiley & Sons: New York, NY, USA, 2002. [Google Scholar]
- Farina, A. Principles and Methods in Landscape Ecology: Towards a Science of the Landscape; Springer Science & Business Media: London, UK, 2008; Volume 3. [Google Scholar]
- Tonnelat, S. The sociology of urban public spaces. In Territorial Evolution and Planning Solution: Experiences from China and France; Atlantis Press: Paris, France, 2010; pp. 84–92. [Google Scholar]
- Fisher-Gewirtzman, D. 3D models as a platform for urban analysis and studies on human perception of space. In Usage, Usability, and Utility of 3D City Models–European COST Action TU0801; EDP Sciences: Les Ulis, France, 2012; p. 01001. [Google Scholar]
- Clouston, B. Landscape Design with Plants; Newnes: New South Wales, Australia, 2013. [Google Scholar]
- Oke, T.R. City size and the urban heat island. Atmos. Environ. (1967) 1973, 7, 769–779. [Google Scholar] [CrossRef]
- Kim, H.H. Urban heat island. Int. J. Remote Sens. 1992, 13, 2319–2336. [Google Scholar] [CrossRef]
- Rizwan, A.M.; Dennis, L.Y.; Chunho, L. A review on the generation, determination and mitigation of Urban Heat Island. J. Environ. Sci. 2008, 20, 120–128. [Google Scholar] [CrossRef]
- Guerin, D.A. Issues facing interior design education in the twenty-first century. J. Inter. Des. 1991, 17, 9–16. [Google Scholar] [CrossRef]
- Harwood, B. Comparing the standards in interior design and architecture to assess similarities and differences. J. Inter. Des. 1991, 17, 5–18. [Google Scholar] [CrossRef]
- Mitton, M.; Nystuen, C. Residential Interior Design: A Guide to Planning Spaces; John Wiley & Sons: New York, NY, USA, 2016. [Google Scholar]
- Lee, J.H.; Hashimoto, H. Intelligent space–concept and contents. Adv. Robot. 2002, 16, 265–280. [Google Scholar] [CrossRef]
- Ahmed, N.; Miller, H.J. Time–space transformations of geographic space for exploring, analyzing and visualizing transportation systems. J. Transp. Geogr. 2007, 15, 2–17. [Google Scholar] [CrossRef]
- Yang, L.; Wang, F.Y. Driving into intelligent spaces with pervasive communications. IEEE Intell. Syst. 2007, 22, 12–15. [Google Scholar] [CrossRef]
- Qu, F.; Wang, F.Y.; Yang, L. Intelligent transportation spaces: Vehicles, traffic, communications, and beyond. IEEE Commun. Mag. 2010, 48, 136–142. [Google Scholar] [CrossRef]
- Lee, J.H.; Hashimoto, H. Intelligent space, its past and future. In Proceedings of the IECON’99—Conference Proceedings 25th Annual Conference of the IEEE Industrial Electronics Society (Cat. No. 99CH37029), San Jose, CA, USA, 29 November–3 December 1999; Volume 1, pp. 126–131. [Google Scholar]
- Wright, S.; Steventon, A. Intelligent spaces—The vision, the opportunities and the barriers. BT Technol. J. 2004, 22, 15–26. [Google Scholar] [CrossRef]
- Wang, F.Y.; Zeng, D.; Yang, L. Smart cars on smart roads: An IEEE intelligent transportation systems society update. IEEE Pervasive Comput. 2006, 5, 68–69. [Google Scholar] [CrossRef]
- Liu, B.; Wang, F.Y.; Geng, J.; Yao, Q.; Gao, H.; Zhang, B. Intelligent spaces: An overview. In Proceedings of the 2007 IEEE International Conference on Vehicular Electronics and Safety, Beijing, China, 13–15 December 2007; pp. 1–6. [Google Scholar]
- Princeton University. Princeton WorldNetWeb. 2010. Available online: http://wordnetweb.princeton.edu/perl/webwn (accessed on 17 December 2019).
- Lexico.com. Oxford Dictionary. 2019. Available online: https://en.oxforddictionaries.com (accessed on 17 December 2019).
- Merriam-Webster, Incorporated. Merriam-Webster Dictionary. 2019. Available online: https://www.merriam-webster.com/dictionary (accessed on 17 December 2019).
- Dictionary.com, LLC. Dictionary.com. 2019. Available online: http://www.dictionary.com/ (accessed on 17 December 2019).
- Cambridge University Press. Cambridge Dictionary. 2019. Available online: http://dictionary.cambridge.org (accessed on 17 December 2019).
- Collins. Collins Dictionary. 2019. Available online: https://www.collinsdictionary.com/ (accessed on 17 December 2019).
- Farlex, Inc. The Free Dictionary by Farlex. 2003–2019. Available online: http://www.thefreedictionary.com/ (accessed on 17 December 2019).
- Afyouni, I.; Ray, C.; Claramunt, C. A fine-grained context-dependent model for indoor spaces. In Proceedings of the 2nd ACM Sigspatial International Workshop on Indoor Spatial Awareness, San Jose, CA, USA, 3–5 November 2010; pp. 33–38. [Google Scholar]
- Winter, S. Indoor spatial information. Int. J. 3-D Inf. Model. (IJ3DIM) 2012, 1, 25–42. [Google Scholar] [CrossRef]
- Chen, J.; Clarke, K.C. Indoor cartography. Cartogr. Geogr. Inf. Sci. 2019, 1–15. [Google Scholar] [CrossRef]
- Amutha, B.; Nanmaran, K. Development of a ZigBee based virtual eye for visually impaired persons. In Proceedings of the 2014 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Busan, Korea, 27–30 October 2014; pp. 564–574. [Google Scholar]
- Ortiz, A.; Bonnin-Pascual, F.; Garcia-Fidalgo, E.; Company, J.P. Saliency-driven Visual Inspection of Vessels by means of a Multirotor. In The Workshop on Vision-Based Control & Navigation of Small; IEEE: Hamburg, Germany, 2015; pp. 20–46. [Google Scholar]
- Du, X.; Bokel, R.; van den Dobbelsteen, A. Building microclimate and summer thermal comfort in free-running buildings with diverse spaces: A Chinese vernacular house case. Build. Environ. 2014, 82, 215–227. [Google Scholar] [CrossRef]
- Cao, B.; Luo, M.; Li, M.; Zhu, Y. Thermal comfort in semi-outdoor spaces within an office building in Shenzhen: A case study in a hot climate region of China. Indoor Built Environ. 2017, 27, 1431–1444. [Google Scholar] [CrossRef]
- Turrin, M.; Kilian, A.; Stouffs, R.; Sariyildiz, S. Digital design exploration of structural morphologies integrating adaptable modules. In A Design Process Based on Parametric Modeling. Proceedings of the Caad Futures 2009 International Conference: Joining Languages, Cultures and Visions, Lemessos, Cyprus, 29 October 2009; CUMINCAD: Montreal, Canada, 2009; pp. 17–19. [Google Scholar]
- Chengappa, C.; Edwards, R.; Bajpai, R.; Shields, K.N.; Smith, K.R. Impact of improved cookstoves on indoor air quality in the Bundelkhand region in India. Energy Sustain. Dev. 2007, 11, 33–44. [Google Scholar] [CrossRef]
- Lin, T.P.; Andrade, H.; Hwang, R.; Oliveira, S.; Matzarakis, A. The comparison of thermal sensation and acceptable range for outdoor occupants between Mediterranean and subtropical climates. In Proceedings of the 18th International Congress on Biometeorology, Tokyo, Japan, 22–26 September 2008. [Google Scholar]
- Indraganti, M. Adaptive use of natural ventilation for thermal comfort in Indian apartments. Build. Environ. 2010, 45, 1490–1507. [Google Scholar] [CrossRef]
- Pagliarini, G.; Rainieri, S. Thermal environment characterisation of a glass-covered semi-outdoor space subjected to natural climate mitigation. Energy Build. 2011, 43, 1609–1617. [Google Scholar] [CrossRef]
- Kim, T.; Kato, S.; Murakami, S. Indoor cooling/heating load analysis based on coupled simulation of convection, radiation and HVAC control. Build. Environ. 2001, 36, 901–908. [Google Scholar] [CrossRef]
- Philokyprou, M.; Michael, A.; Thravalou, S.; Ioannou, I. Thermal performance assessment of vernacular residential semi-open spaces in Mediterranean climate. Indoor Built Environ. 2017, 27, 1050–1068. [Google Scholar] [CrossRef]
- Li, S. Users’ behaviour of small urban spaces in winter and marginal seasons. Archit. Behav. 1994, 10, 95–109. [Google Scholar]
- Slingsby, A.; Raper, J. Navigable space in 3D city models for pedestrians. In Advances in 3D Geoinformation Systems; Springer: London, UK, 2008; pp. 49–64. [Google Scholar]
- Pagliarini, G.; Rainieri, S. Dynamic thermal simulation of a glass-covered semi-outdoor space with roof evaporative cooling. Energy Build. 2011, 43, 592–598. [Google Scholar] [CrossRef]
- Spagnolo, J.; De Dear, R. A field study of thermal comfort in outdoor and semi-outdoor environments in subtropical Sydney Australia. Build. Environ. 2003, 38, 721–738. [Google Scholar] [CrossRef]
- Turrin, M.; Von Buelow, P.; Kilian, A.; Stouffs, R. Performative skins for passive climatic comfort: A parametric design process. Autom. Constr. 2012, 22, 36–50. [Google Scholar] [CrossRef]
- Goshayeshi, D.; Shahidan, M.F.; Khafi, F.; Ehtesham, E. A review of researches about human thermal comfort in semi-outdoor spaces. Eur. Online J. Nat. Soc. Sci. 2013, 2, 516. [Google Scholar]
- Lin, T.P.; Matzarakis, A.; Huang, J.J. Thermal comfort and passive design strategy of bus shelters. In Proceedings of the 23rd Conference on Passive and Low Energy Architecture, Geneva, Switzerland, 6–8 September 2006. [Google Scholar]
- Yang, W.; Wong, N.H.; Jusuf, S.K. Thermal comfort in outdoor urban spaces in Singapore. Build. Environ. 2013, 59, 426–435. [Google Scholar] [CrossRef]
- Robinson, N. The Planting Design Handbook; Routledge: Abingdon, UK, 1992. [Google Scholar]
- Li, X. Study on the Structures and Images of Landscape Planting. Ph.D. Thesis, Beijing Forestry University, Beijing, China, 2006. [Google Scholar]
- Dee, C. Form and Fabric in Landscape Architecture: A Visual Introduction; Taylor & Francis: London, UK, 2004. [Google Scholar]
- Li, Y.m.; Guo, J.; Feng, J. Urban green space and its effect on urban heat island effect. Urban Environ. Urban Ecol. 2004, 17, 1–4. [Google Scholar]
- Heidt, V.; Neef, M. Benefits of urban green space for improving urban climate. In Ecology, Planning, and Management of Urban Forests; Springer: London, UK, 2008; pp. 84–96. [Google Scholar]
- Yao, L.; Chen, L.; Wei, W.; Sun, R. Potential reduction in urban runoff by green spaces in Beijing: A scenario analysis. Urban For. Urban Green. 2015, 14, 300–308. [Google Scholar] [CrossRef]
- Jim, C.Y. Green-space preservation and allocation for sustainable greening of compact cities. Cities 2004, 21, 311–320. [Google Scholar] [CrossRef]
- Jim, C.Y.; Chen, W.Y. Perception and attitude of residents toward urban green spaces in Guangzhou (China). Environ. Manag. 2006, 38, 338–349. [Google Scholar] [CrossRef]
- Tian, Y.; Jim, C.Y.; Wang, H. Assessing the landscape and ecological quality of urban green spaces in a compact city. Landsc. Urban Plan. 2014, 121, 97–108. [Google Scholar] [CrossRef]
- McPhearson, T.; Andersson, E.; Elmqvist, T.; Frantzeskaki, N. Resilience of and through urban ecosystem services. Ecosyst. Serv. 2015, 12, 152–156. [Google Scholar] [CrossRef]
- Sun, R.; Chen, L. Effects of green space dynamics on urban heat islands: Mitigation and diversification. Ecosyst. Serv. 2017, 23, 38–46. [Google Scholar] [CrossRef]
- Faryadi, S.; Taheri, S. Interconnections of urban green spaces and environmental quality of Tehran. Int. J. Environ. Res. 2009, 3, 199–208. [Google Scholar]
- Balling, R.C., Jr.; Lolk, N.K. A developing cool island in the desert? The case of Palm Springs, California. J. Ariz. Nev. Acad. Sci. 1991, 23, 93–96. [Google Scholar]
- Spronken-Smith, R.; Oke, T. The thermal regime of urban parks in two cities with different summer climates. Int. J. Remote Sens. 1998, 19, 2085–2104. [Google Scholar] [CrossRef]
- Chang, C.R.; Li, M.H.; Chang, S.D. A preliminary study on the local cool-island intensity of Taipei city parks. Landsc. Urban Plan. 2007, 80, 386–395. [Google Scholar] [CrossRef]
- Wolch, J.R.; Byrne, J.; Newell, J.P. Urban green space, public health, and environmental justice: The challenge of making cities ‘just green enough’. Landsc. Urban Plan. 2014, 125, 234–244. [Google Scholar] [CrossRef]
- Zhang, Y.; Murray, A.T.; Turner Ii, B. Optimizing green space locations to reduce daytime and nighttime urban heat island effects in Phoenix, Arizona. Landsc. Urban Plan. 2017, 165, 162–171. [Google Scholar] [CrossRef]
- Launchpad. 7 Elements of Interior Design. 2015. Available online: http://launchpadacademy.in/elements-of-interior-design-2/ (accessed on 17 December 2019).
- Singh, S.K. Review of urban transportation in India. J. Public Transp. 2005, 8, 5. [Google Scholar] [CrossRef]
- Currie, G.; Sarvi, M.; Young, B. A new approach to evaluating on-road public transport priority projects: balancing the demand for limited road-space. Transportation 2007, 34, 413–428. [Google Scholar] [CrossRef]
- Gröger, G.; Kolbe, T.H.; Nagel, C.; Häfele, K.H. OGC City Geography Markup Language (CityGML) Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2012. [Google Scholar]
- Litman, T. Introduction to Multi-modal Transportation Planning; Victoria Transport Policy Institute: Victoria, BC, Canada, 2017. [Google Scholar]
- Wu, Q.; Huang, C.; Wang, S.Y.; Chiu, W.C.; Chen, T. Robust parking space detection considering inter-space correlation. In Proceedings of the 2007 IEEE International Conference on Multimedia and Expo, Beijing, China, 2–5 July 2007; pp. 659–662. [Google Scholar]
- True, N. Vacant Parking Space Detection in Static Images; University of California: San Diego, CA, USA, 2007; Volume 17, pp. 659–662. [Google Scholar]
- Park, W.J.; Kim, B.S.; Seo, D.E.; Kim, D.S.; Lee, K.H. Parking space detection using ultrasonic sensor in parking assistance system. In Proceedings of the 2008 IEEE Intelligent Vehicles Symposium, Eindhoven, The Netherlands, 4–6 June 2008; pp. 1039–1044. [Google Scholar]
- Ichihashi, H.; Notsu, A.; Honda, K.; Katada, T.; Fujiyoshi, M. Vacant parking space detector for outdoor parking lot by using surveillance camera and FCM classifier. In Proceedings of the 2009 IEEE International Conference on Fuzzy Systems, Jeju Island, South Korea, 20–24 August 2009; pp. 127–134. [Google Scholar]
- Yusnita, R.; Norbaya, F.; Basharuddin, N. Intelligent parking space detection system based on image processing. Int. J. Innov. Manag. Technol. 2012, 3, 232–235. [Google Scholar]
- Klappenecker, A.; Lee, H.; Welch, J.L. Finding available parking spaces made easy. Ad Hoc Netw. 2014, 12, 243–249. [Google Scholar] [CrossRef]
- Verroios, V.; Efstathiou, V.; Delis, A. Reaching available public parking spaces in urban environments using ad hoc networking. In Proceedings of the 2011 IEEE 12th International Conference on Mobile Data Management, Lulea, Sweden, 6–9 June 2011; Volume 1, pp. 141–151. [Google Scholar]
- Coric, V.; Gruteser, M. Crowdsensing maps of on-street parking spaces. In Proceedings of the 2013 IEEE International Conference on Distributed Computing in Sensor Systems, Cambridge, MA, USA, 20–23 May 2013; pp. 115–122. [Google Scholar]
- Delot, T.; Ilarri, S.; Lecomte, S.; Cenerario, N. Sharing with caution: Managing parking spaces in vehicular networks. Mob. Inf. Syst. 2013, 9, 69–98. [Google Scholar] [CrossRef]
- Appenzeller, G.; Lee, J.H.; Hashimoto, H. Building topological maps by looking at people: An example of cooperation between intelligent spaces and robots. In Proceedings of the 1997 IEEE/RSJ International Conference on Intelligent Robot and Systems. Innovative Robotics for Real-World Applications, IROS’97, Grenoble, France, 11 September 1997; Volume 3, pp. 1326–1333. [Google Scholar]
- Hollands, R.G. Will the real smart city please stand up? Intelligent, progressive or entrepreneurial? City 2008, 12, 303–320. [Google Scholar] [CrossRef]
- Lee, J.H.; Appenzeller, G.; Hashimoto, H. An agent for intelligent spaces: functions and roles of mobile robots in sensored, networked and thinking spaces. In Proceedings of the Conference on Intelligent Transportation Systems, Boston, MA, USA, 12 November 1997; pp. 983–988. [Google Scholar]
- Raghothama, S.; Shapiro, V. Boundary representation deformation in parametric solid modeling. ACM Trans. Graph. (TOG) 1998, 17, 259–286. [Google Scholar] [CrossRef]
- Rossignac, J.R. Constraints in constructive solid geometry. In Proceedings of the 1986 workshop on Interactive 3D Graphics, Chapel Hill, NC, USA, 23–24 October 1987; pp. 93–110. [Google Scholar]
- Ramakrishnan, C.; Ramakrishnan, S.; Kumar, A.; Bhattacharya, M. An integrated approach for automated generation of two/three dimensional finite element grids using spatial occupancy enumeration and Delaunay triangulation. Int. J. Numer. Methods Eng. 1992, 34, 1035–1050. [Google Scholar] [CrossRef]
- Gorte, B.; Aleksandrov, M.; Zlatanova, S. Towards egress modelling in Voxel building models. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 43–47. [Google Scholar] [CrossRef]
- Aleksandrov, M.; Zlatanova, S.; Kimmel, L.; Barton, J.; Gorte, B. Voxel-Based Visibility Analysis for Safety Assessment of Urban Environments. ISPRS Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 11–17. [Google Scholar] [CrossRef]
- Li, F.; Zlatanova, S.; Koopman, M.; Bai, X.; Diakité, A. Universal path planning for an indoor drone. Autom. Constr. 2018, 95, 275–283. [Google Scholar] [CrossRef]
- Gorte, B.; Zlatanova, S.; Fadli, F. Navigation in indoor voxel models. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, IV-2/W5, 279–283. [Google Scholar] [CrossRef]
- Lee, J.; Li, K.J.; Zlatanova, S.; Kolbe, T.; Nagel, C.; Becker, T. OGC IndoorGML; OGC: Wayland, MA, USA, 2014. [Google Scholar]
- Becker, T.; Nagel, C.; Kolbe, T.H. A multilayered space-event model for navigation in indoor spaces. In 3D Geo-Information Sciences; Springer: London, UK, 2009; pp. 61–77. [Google Scholar]
- Boguslawski, P.; Gold, C. Construction operators for modelling 3D objects and dual navigation structures. In 3D Geo-Information Sciences; Springer: London, UK, 2009; pp. 47–59. [Google Scholar]
- Munkres, J.R. Elements of Algebraic Topology; Addison-Wesley: Menlo Park, CA, USA, 1984; Volume 2. [Google Scholar]
- Mortari, F.; Zlatanova, S.; Liu, L.; Clementini, E. “Improved geometric network model” (IGNM): A novel approach for deriving connectivity graphs for indoor navigation. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2014, 2, 45. [Google Scholar] [CrossRef]
- Pang, Y.; Zhang, C.; Zhou, L.; Lin, B.; Lv, G. Extracting indoor space information in complex building environments. Isprs Int. J. -Geo-Inf. 2018, 7, 321. [Google Scholar] [CrossRef]
- Beirão, J.N.; Chaszar, A. Convex-and Solid-Void Models for Analysis and Classification of Public Spaces. In Proceedings of the 19th CAADRIA International Conference, Kyoto, Japan, 14–16 May 2014; pp. 253–262. [Google Scholar]
- Beirão, J.N.; Chaszar, A.; Čavić, L. Analysis and Classification of Public Spaces Using Convex and Solid-Void Models. In Future City Architecture for Optimal Living; Springer: London, UK, 2015; pp. 241–270. [Google Scholar]
- Sileryte, R.; Cavic, L.; Beirao, J.N. Automated generation of versatile data model for analyzing urban architectural void. Comput. Environ. Urban Syst. 2017, 66, 130–144. [Google Scholar] [CrossRef]
- buildingSMART International Ltd. Industry Foundation Classes Version 4.2 bSI Draft Standard IFC Bridge Proposed Extension. 1996–2019. Available online: https://standards.buildingsmart.org/IFC/DEV/IFC4_2/FINAL/HTML/ (accessed on 17 December 2019).
- Kara, A.; Çağdaş, V.; Işıkdağ, Ü.; Turan, B.O. Towards harmonizing property measurement standards. J. Spat. Inf. Sci. 2018, 2018, 87–119. [Google Scholar] [CrossRef]
- Lemmen, C.; Van Oosterom, P.; Thompson, R.; Hespanha, J.P.; Uitermark, H. The modelling of spatial units (parcels) in the Land Administration Domain Model (LADM). In Proceedings of the XXIV FIG International Congress 2010: Facing the Challenges - Building the Capacity. International Federation of Surveyors, Sydney, Australia, 11–16 April 2010. [Google Scholar]
- Lemmen, C.; Van Oosterom, P.; Bennett, R. The land administration domain model. Land Use Policy 2015, 49, 535–545. [Google Scholar] [CrossRef]
- Zlatanova, S.; Li, K.; Lemmen, C.; van Oosterom, P. Indoor abstract spaces: linking IndoorGML and LADM. In Proceedings of the 5th international FIG workshop on 3D cadastres, Athens, Greece, 18–20 October 2016; FIG: Delft, The Netherlands, 2016; pp. 317–328. [Google Scholar]
- Zlatanova, S.; Van Oosterom, P.; Lee, J.; Li, K.; Lemmen, C. LADM and IndoorGML for support of indoor space identification. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, 4, 257–263. [Google Scholar] [CrossRef]
- Alattas, A.; Zlatanova, S.; Van Oosterom, P.; Chatzinikolaou, E.; Lemmen, C.; Li, K.J. Supporting indoor navigation using access rights to spaces based on combined use of IndoorGML and LADM models. Isprs Int. J. -Geo-Inf. 2017, 6, 384. [Google Scholar] [CrossRef]
- Yan, J.; Zlatanova, S.; Aleksandrov, M.; Diakite, A.; Pettit, C. Integration of 3d Objects and Terrain for 3d Modelling Supporting the Digital Twin. Isprs Ann. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, 4, 147–154. [Google Scholar] [CrossRef]
- Zlatanova, S.; Gruber, M.; Kofler, M. Merging DTM and CAD data for 3D Modeling purposes for Urban Areas. In Proceedings of the ISPRS Proceedings, Cambridge, MA, USA, 19–21 June 1996; Volume 36, pp. 311–315. [Google Scholar]
- Zlatanova, S.; Bandrova, T. User requirements for the third dimensionality. In E-mail Seminar of Cartography; Springer: London, UK, 1998; Volume 1, pp. 61–72. [Google Scholar]
- Hillier, B.; Hanson, J. The Social Logic of Space; Cambridge University Press: Cambridge, UK, 1984. [Google Scholar]
- Jiang, B.; Liu, X. Automatic generation of the axial lines of urban environments to capture what we perceive. Int. J. Geogr. Inf. Sci. 2010, 24, 545–558. [Google Scholar] [CrossRef]
- Rampinelli, M.; Covre, V.; de Queiroz, F.; Vassallo, R.; Bastos-Filho, T.; Mazo, M. An intelligent space for mobile robot localization using a multi-camera system. Sensors 2014, 14, 15039–15064. [Google Scholar] [CrossRef]
- Bodgan, J.; Coors, V. Using 3D urban models for pedestrian navigation support. In Proceedings of the ISPRS Working Group III/4, IV/8, IV/5, Berlin, Germany, 23 September 2009; pp. 9–15. [Google Scholar]
- Andreev, S.; Dibbelt, J.; Nöllenburg, M.; Pajor, T.; Wagner, D. Towards realistic pedestrian route planning. In Proceedings of the 15th Workshop on Algorithmic Approaches for Transportation Modelling, Optimization, and Systems (ATMOS 2015), Patras, Greece, 17 September 2015. [Google Scholar]
- Vanclooster, A.; Van de Weghe, N.; De Maeyer, P. Integrating indoor and outdoor spaces for pedestrian navigation guidance: A review. Trans. GIS 2016, 20, 491–525. [Google Scholar] [CrossRef]
- Graser, A. Integrating open spaces into OpenStreetMap routing graphs for realistic crossing behaviour in pedestrian navigation. Int. J. Geogr. Inf. Sci. 2016, 4, 217–230. [Google Scholar] [CrossRef][Green Version]
- Hannah, C.; Spasić, I.; Corcoran, P. A computational model of pedestrian road safety: the long way round is the safe way home. Accid. Anal. Prev. 2018, 121, 347–357. [Google Scholar] [CrossRef] [PubMed]
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).