1. Introduction
Heterogeneous parameters of the road environment contribute, to a greater or lesser extent, to the cause of wildlife–vehicle collisions (WVCs). Land use, road structure, as well as traffic volume and speed are already explored parameters with a significant impact on WVCs [
1,
2,
3]. One aspect which has been marginally researched is the road accompanying structure. This opens the question up as to what extent the roadside infrastructure, such as crash barriers and fences, affect the local occurrence of WVCs. Analyses in this context have been restricted in the past by data availability for WVCs, on the one hand, and georeferenced and digital documentation of roadside infrastructures on the other hand.
For road documentation, camera-based inspections are made on a regular basis for most roads in Germany, using a car as a carrier for up to four cameras (for the front, rear, left, and right side of the driving direction). While camera data is georeferenced, we posed the question whether computer vision, in combination with GIS-based approaches, would be able to derive a georeferenced infrastructure inventory from these images. This information could provide knowledge about different risk types in the road environment, e.g., factors influencing the risk for wildlife crossings.
Relying on experiences on automatic extraction of road signs from images, (e.g. [
4,
5]) using artificial intelligence and machine learning, (e.g. [
6,
7]), we based our research on the following hypothesis:
- (1)
Crash barriers and fences can be identified in a series of inspection images by an artificial neural network (ANN).
- (2)
Using GIS, a georeferenced inventory of fences and barriers can be built.
- (3)
The barriers have a preventive measure while influencing animals’ behavior and, hence, reduce accidents.
In this context, we want to especially consider the effect on different species. We restricted the study to crash barriers and fences, which we will refer to as barriers in the following text.
At this preliminary research stage, the objective was to test individual steps, which could be later combined to build an automated process chain from updating the inventory on basis of camera data through machine learning and GIS-based documentation and analysis. As the majority of German building authorities only have individual road construction plans with crash barriers and fences, but not any comprehensive spatial barriers’ documentation available, we propose the machine learning and GIS-driven approach for automatic identification and georeferencing using existing photo material from official road inspections. The project is driven by the idea that a better understanding of animals’ behavior and resulting accidents could help to better plan and place protective measures. Also, a better warning for car drivers, e.g., through mobile applications, may be a potential opportunity to increase road security with this combined GIS and machine learning approach.
In the first part of this paper, we introduce the state of the art in GIS-based WVC analysis, considering, especially, the aspect of infrastructural effects. Additionally, potential approaches were analyzed, such as how to integrate ANN for feature detection and GIS to build an infrastructure inventory. Based on the material of WVCs and images of camera-based road inspections, we developed a methodology, how to use barriers, derived from computer vision and artificial intelligence in geospatial modelling. Afterwards, the relation of the occurred WVCs and the presence or absence of both barrier types is evaluated statistically. After the presentation of our results showing the species-specific effect, we draw conclusions and propose the next steps to include the abovementioned results in a larger framework for WVC analysis and prediction.
2. State of Art of GIS-Based WVC Analysis
Thus far, GIS methods have been utilized by several studies about WVCs to compare the accident occurrence with environmental, infrastructural, and traffic parameters (e.g., [
8]). In order to contribute to road safety efforts, the GIS studies analyzed WVC development and changes in landscape structures [
9], the placement of warning signs [
10], delineating wildlife movement [
11], or the impact of landscape on WVCs [
12]. Even though some studies ascertained that infrastructure has an impact on WVCs [
1,
13], the number of studies dealing with specific infrastructure types is limited, and those available are spatially restricted and have not been able to substantially quantify the effect of different structures, such as barriers and fences, on WVCs [
2,
14,
15,
16]. To the best knowledge of the authors, until now, no research on the impact of crash barriers has been undertaken at such a scale [
14,
15].
For fences, Seiler found out that “Traffic volume, vehicle speed and the occurrence of fences were dominant factors determining MVC risks” [
13] (MVC—moose vehicle collision). While fences reduce the risk of WVCs, they also seem to shift parts of the risk to the end of the fence [
13] and do not exclude accidents inside the fenced area. As deer, for example, circumvent the fence [
17], the collision risk increases the fence endings by a higher concentration of crossing numbers. Colino-Rabanal et al. identified in their data that “roadkill was proportionally higher along fenced highways than on similar major roads that lacked fences” [
18], but they mainly see low traffic volumes along these unfenced roads as the reason for the low numbers of WVCs.
So far, the availability of data has been restricted and has limited studies from drawing conclusions about the connection between WVC and infrastructure. Now, camera-based road inspections provide a huge amount of data to derive inventories from, offering data for the aforementioned limited research efforts. Therefore, de Frutos et al. suggested to use smartphone-based cameras and apps for video inspections [
19], an alternative option to the more expensive terrestrial laser scanning [
20]. Besides, process chains to collect and evaluate image data using GIS-based handling of camera-based material and frames have been recommended [
21]. The extraction of infrastructure data can be achieved using computer vision, which was already recommended for camera-based road inspections, but mainly applied for pavement analysis and road sign detection [
22]. The predominant applied example is, in general, road sign detection [
7,
23,
24], resulting in a vast number of approaches from classical computer vision [
7], via support vector machine [
24] and neural networks [
6]. The use of artificial intelligence and neural networks have especially contributed to this domain. While transfer learning improves the ability to rely on existing nets and focus the learning on specific aspects of a type of images [
25], image databases, such as ImageNet [
26,
27] and competitions [
27,
28], contribute to making the approaches transferrable, systems comparable, and to provide a solid basis for transfer learning.
3. Material and Method
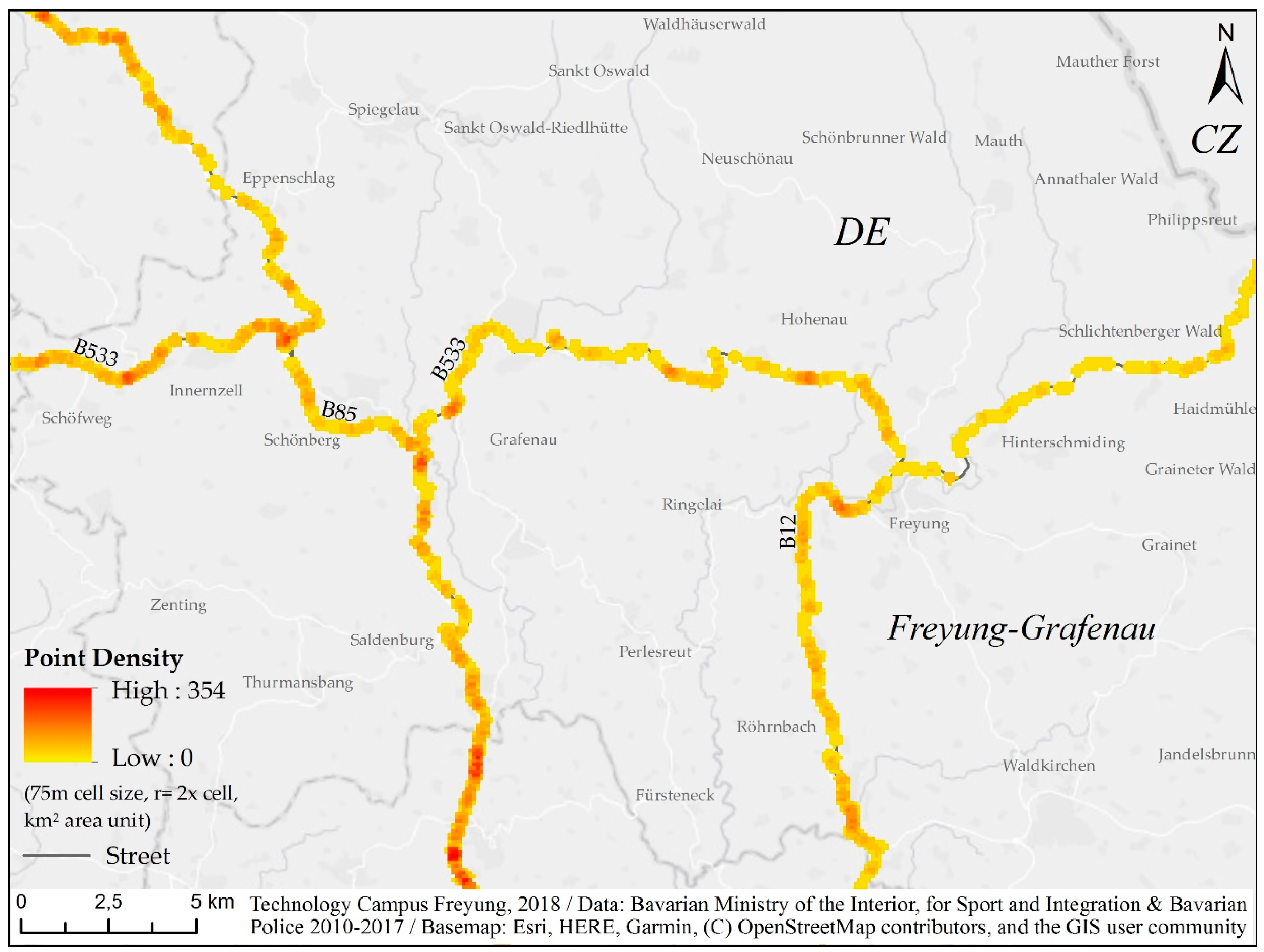
During the past eight years, Bavarian police recorded all reported WVCs, georeferenced the location of the accidents, and documented the species of the animal involved in the accident. We used an excerpt of this dataset for the district of Freyung-Grafenau, a rural accident hotspot in the Bavarian Forest, Germany (
Figure 1). The dataset contains 1571 accidents within the period of 2010–2017 at secondary roads. As a lot of WVCs occur at overland roads of the secondary street class, we have chosen a dataset with all three secondary roads B 12, B 85, and B 533 (national roads—Bundesstrasse) for the analysis. To identify the relevant roadside infrastructure, we used 5596 images recorded by camera-based inspections along the road, data from official road inspections from the Bavarian Ministry of the Interior, for Building and Transport of the year 2015. While WVC data covers a period of the past eight years, the barrier information is, due to the photo material, only a snapshot of the situation in 2015. However, we assume that the changes in this type of infrastructure are minor and will not have significant impact on the analysis.
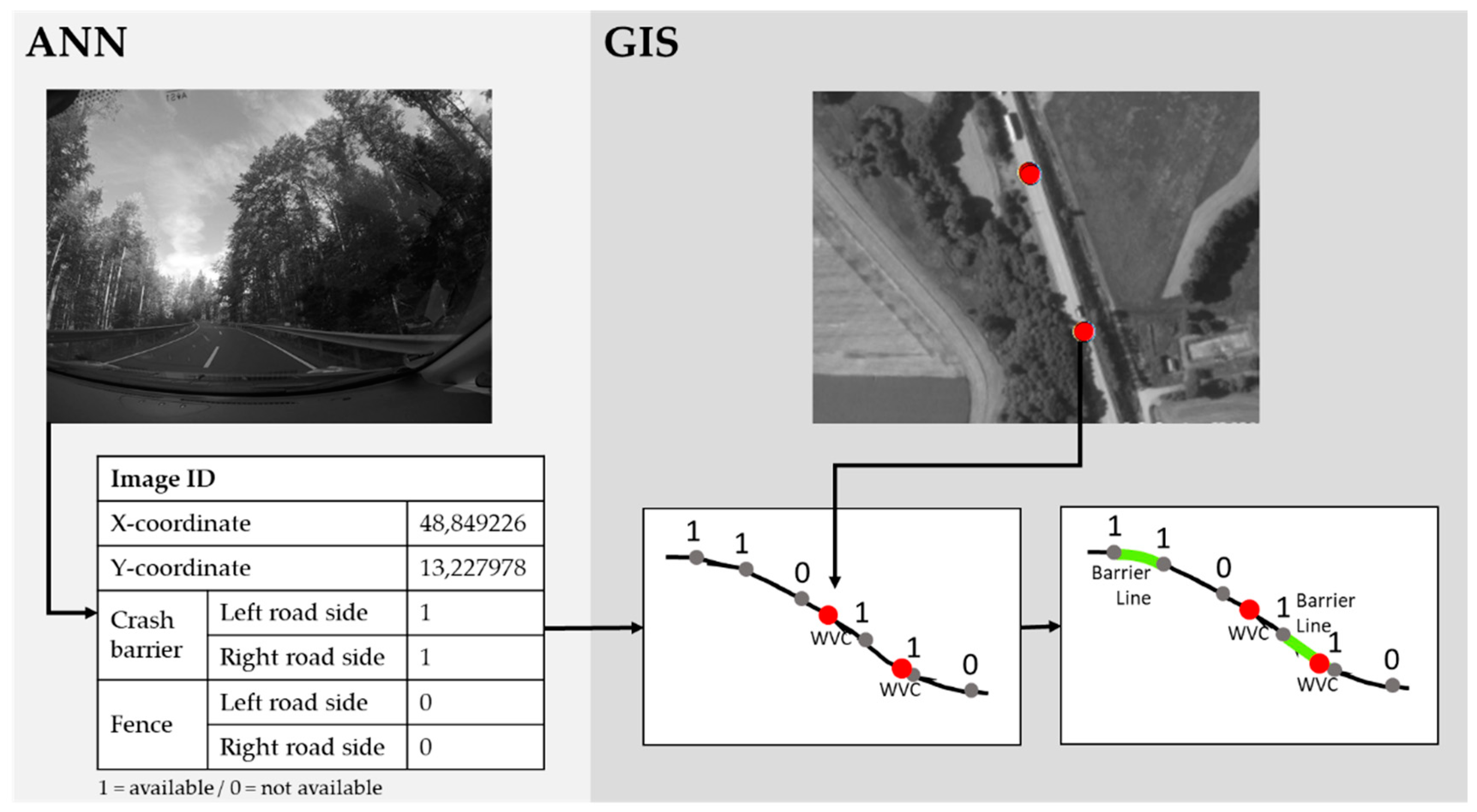
For the investigation, we used information about animal- and human-preserving barriers (crash barriers and fences) derived from an automatized image classification with the TensorFlow framework and a GIS analysis (see
Figure 2 for the concept and
Figure 3 for the process chain). First, we manually classified all images of the camera inspection. The basic ANN was constructed by using Inception V3 architecture. For the training, the transfer learning approach was used because the set of available data was too small to train an own network. A pre-trained network, based on the ImageNet dataset [
27], was taken to support the training work. The output layers were removed, and the network was trained again, using a set of roughly 800 inspection images.
Input data to the Inception V3 model are images with a size of 299 × 299 pixels. All input data was automatically scaled by the TensorFlow framework. Monitoring of the training process showed that 6000 training steps were sufficient, and further training steps did not increase the classification quality. Two separate ANNs were used to classify fences and crash barriers. A total of 398 images was split for fence detection. Manually pre-classified data from the left (211 images) and the right camera (187 images) were taken, showing fences in comparison to 418 images without fences. For crash barriers, we used 835 manually pre-classified images with 455 images showing a barrier, and 380 without a barrier. Eighty percent of images were used for training, 10% for validation, and 10% for testing in the ANN. We shuffled training data to use left and right images alternately.
For the first training of the ANN, we used camera data from the left and right side of the car. Cameras were directed in the front right and front left direction. While the car was permanently driving at the right side of the street, the consequence was that the distance between camera and the border of the street, where fences are mainly located, was a minimum of 2 to 2.5 m on the right side (strip of the street plus embankment and drainage system), but at a minimum 5.5 to 6 m at the left hand side (left lane of the street roughly 3.5 m plus embankment and drainage system). Consequently, the images, especially those displaying fences, have different resolutions, due to the distance to the camera. Thus, we adapted the methodology later on by only using images from the right side camera with a higher resolution of depicted objects for training, resulting in a significantly higher classification quality, as shown in Chapter 4.
For further GIS-based analysis, the image classification results are imported into ArcGIS (Desktop ArcMap) using csv format. The result for each image (identified by ID and x and y coordinates) is separated in four values: fence present (1) on the left road side, (2) on the right road side; crash barrier present (3) on the left road side, (4) on the right road side (see
Figure 2).
Approximately 20 m is the distance between two image points giving information about the absence or presence of a fence and a crash barrier. To get linear information about the length of both barrier types, features with the attribute crash barrier = 1 (“available”) and fence = 1 are separately selected and converted into lines. Feature points or, rather, image information, which are classified as non-barrier location, are not considered further. The coordinates of each image point belong to the original record point, indeed, and not the next few meters visible in the image, where the barrier may be identified. Nevertheless, the approach is an easy approximation about where a barrier starts and ends, with a minor uncertainty about the exact start and end point.
Lines with distances smaller than 10 m between two single image points were eliminated. By testing and comparing with the point information, we found out that 10 m was the minimum for a reasonable barrier line, deleting artefacts and very short lines of single wrong classified images (see the case of Figure 6, zoom-in map). Instead, only barriers with more than two points (longer than 10 m) were identified. We calculated the Euclidean distance between the points as an approximation to the road network, and very similar to the road line because of the small image points (see also Figure 6). If the distance between two image points was larger than 80 m, the line was also eliminated, as we assumed that there is a gap in the barrier between the two points, or two discontinuous points have been connected by the point-in-line calculation. As there was no other study available for comparison, this threshold is an assumption which was approximated to the real situation to get a realistic barrier line. Then, the individual files for left and right side barriers were merged, and a new file for the remaining road sections without barriers was calculated using the erase function (including a 10 m buffer for lines not lying exactly on the road line due to inaccurate GPS point data). Finally, the number of WVCs that occurred on roads with and without barrier lines, was summed up separately.
4. Results
To better discuss the individual parts of the research, we split the presentation of the results in three segments: First, presenting the underlying analysis of WVC data, second, looking at the GIS-based results of barrier impact on WVCs, and third, critically reflect the ANN and its contribution to provide the basic infrastructural data.
4.1. WVC Statistics
In the district of Freyung-Grafenau, a total of 1571 WVCs occurred on secondary roads in the years 2010–2017. The increase of accidents over the past eight years correlates with the increase of this accident type in Bavaria and Germany (
Figure 4).
The WVC distribution by species for the three secondary road sections shows that the vast majority of accidents is caused by deer, followed by rabbits and foxes (
Table 1).
4.2. GIS Results
Sixty-four percent of road segments are accompanied by crash barriers, and nearly three percent of roads are protected by fences, as
Figure 5 shows for the whole research area (a), and for one section (b). In
Table 2 and
Table 3, we compared the dependencies between WVCs, barriers, and fences for the manual and ANN-based classification. The comparison of WVCs with areas protected by crash barriers results in an equal number of the total 1571 accidents that happened in sections with barriers (776) versus the accidents in areas without barriers (795). Due to the high classification quality, the manual and automatic classification provided similar results. By considering the length of the sections with and without barriers, the number of WVCs per length is 2.11 times higher in sections without crash barrier (3.30 times higher using ANN classification) in comparison to sections without barriers or, the other way around, the street section where one when WVC occurs is 2.11 times longer on average (WVC proportion to street length).
The distribution of WVCs shows that barriers have an impact on accidents. Especially crash barriers seem to significantly influence the accident situation for all animals, particularly on special species (see also
Table 4). The impact of fences on WVCs needs to be discussed because current data would support the hypothesis that fences would increase the risk of WVCs by the factor 3.08, or areas without fences would have 0.32 times lower risk of accidents. For a total of 113 km, we identified less than 3 km of fenced road segments.
The hypothesis that animals will circumvent the fence and the number of WVCs will increase at the end of a fenced section is supported by literature [
17], and would help to better understand the statistical result. For short fenced sections, also, the inaccuracies in fence positions as well as accident positions may support this theory, because some of the accidents, marked as inside the fenced road section, may have been located near the end of the fence, and could be explained by circumventing.
The effect of crash barriers and fences also depends on the species. Crash barriers seem to have an even stronger retaining effect on badgers and foxes but, also, for the predominant deer population in the area, street segments without crash barriers have a two-times higher (2.16) probability for accidents in comparison to segments with crash barrier (
Table 4). The numbers for rabbits indicate that especially smaller animals, such as rabbits and “others”, seem not to be retained by fences at all. The two-times higher probability for wild birds may explain that the effect on other species might affect the behavior to search for carcasses.
We did not distinguish between different fence types (game fence, non-permanent pasture fence, smaller barriers, and garden fences). Different types might retain some species and may have no effect on others. Also, the length of fenced segments should be further analyzed as circumventing may play a role for wildlife crossings and for the WVC risk. For further research, even larger datasets and a better classification of fences will be necessary.
The large dataset of WVCs is a result of a long monitoring period (eight years), while barrier data only represents a temporal snapshot from 2015. As a consequence, also, more time frames of infrastructure are necessary to analyze changes of constructions.
Figure 6 (for crash barriers) and
Figure 7 (for fences) are the resulting maps with the georeferenced barrier inventory. The comparison of the automatized classification with the manually checked road sections shows a high correspondence of crash barrier identification and the improving requirements in the case of the fence digitization. The small zoom-in map of
Figure 6 presents the advantage of the ANN and GIS combination, as the share of correct identified road sections are increased by using the GIS approach. However, it also shows that the accuracy of the automatic classification still needs to be improved.
4.3. ANN Results
The auto-classification by ANN resulted in a 92% classification rate to identify crash barriers and a 63% rate for fences (
Table 5). In particular, the low classification quality of fences may result from the fragile structure of fences in combination with the differing resolution of images from the two different cameras. We later analyzed this difference in resolution by first training the ANN with images from both sides and, second, with images only from the right side, and used this trained ANN to classify images from both sides of the road.
Results (
Table 6) show that training data stemming from both cameras results in a significant larger number of misclassifications. Training the ANN only with camera data from the right side resulted in nearly 8% more correct positives (ANN identified fences, where fences are on the image) as well as 12% more correct negative (ANN identified no fence, where no fences are). This may indicate that for slim structures, such as fences, resolution is a key aspect for training that will also result in positive classification results for images with a lower resolution of the object.
The classification results for crash barriers are significantly better than those for fences. Crash barriers are, in general, located closer to the road and provide larger and more significant structures. Fences are often located behind crash barriers or even far from the street, which means that fences are below a resolution that could be detected by ANN, or can be mixed up with slim and elongate bushes and small trees, such as birches or hazelnut.
Subsequently we can summarize that pre-trained ANN can be used through transfer learning to identify barriers and fences as roadside infrastructure and create an inventory using GIS techniques, building up an inventory and analyzing the occurrence and cause effect relationships between infrastructure and WVC. Image resolution and the size of the dataset are essential factors for the analysis.
5. Conclusions
In this study, we analyzed the impact of barriers (crash barriers and fences) on the risk of WVCs. We followed the hypothesis that (1) crash barriers and fences can be identified in a series of camera-based road inspection images by an ANN and that (2) a georeferenced inventory of fences and barriers can be built using GIS. Based on this data, we found a preliminary answer to the question of up to which extent barriers can have a preventive measure while influencing animals’ behavior to reduce accidents and increase safety. While a barrier effect of crash barriers is visible, fence impacts must be researched more precisely in the next step. Using ANN to identify barriers in the images provided, in a first attempt, already adequate results, sufficient to delineate barriers in a GIS. GIS was in this part able not only to build the polylines of these structures but also to compensate errors of the ANN by restricting results to a spatially reasonable dataset.
Due to these new possibilities to derive the location and extent of road-accompanying barriers from camera images, we were able to compare, in a preliminary study, 113 km of road network with WVCs from an eight-year period. We found that crash barriers have a strong effect on wildlife and, thus, reduce the risk of WVCs by one-half. For our test site, fences seem not to affect animals, but this requires further testing with a larger region and an increased number of roadside fences. However, the crash barrier information can already be considered in a new type of WVC warning system for car drivers to better predict areas at risk, or to improve planning of protection measures.
From a methodological perspective, the combination of artificial intelligence with GIS provides a new concept to make a study on a topic, where up-to-date quantitative research was not possible due to a lack of data. The study still leaves some questions open and requires further consideration to improve the quality of results as well as the accuracy of geodata with regard to completeness and precision of location. The classification of fences needs to be developed further due to different fence types, having differing visual appearance and effects on wildlife. There is a need to distinguish between game fences, protection fences, as well as garden fences, and other possible subtypes. For this new training material and, also, a larger test region, it will be necessary to increase the total available length of fences and sections for different fence types. Additionally, the resolution of the inspection images might contribute to a better quality of the ANN’s detection rate. We applied a standard resolution of 299 × 299 pixels to use an existing trained network for transfer learning. Using the available image resolution and training an own neural network will increase the effort to manually classify sufficient data but might also improve barrier—especially fence—recognition.
From a data perspective, three aspects should be considered in the future: (1) Infrastructure developments over time. The length of the available time series (eight years for WVC) will require consideration of the development of the built environment at and along a street in the future. This will increase complexity from a GIS perspective, to take into account spatiotemporal data. The problem is, again, data availability due to missing documentation of these structures. While accidents are documented on a daily basis, changes of infrastructure might be only considered depending on inspection intervals. (2) Other types of barriers, such as noise protection barriers, dams, and hill intersections with steep slopes, walls, or gullies were not considered in this study, but might also impact animals’ behavior and movement patterns and, hence, WVC occurrence and risk. These types of structures are also undocumented and can only partially be derived from photos. Mixed approaches, combining inspection images and laser scanning data, might provide the necessary information. Then, the presented methodology might be applied to these infrastructure types. (3) While past studies only considered a small number of WVC-influencing factors, the current study and its applicability to alternative barrier types indicates that a significant number of parameters needs to be considered to explain WVC development. Besides road infrastructure and traffic as WVC-influencing factors, a better understanding of habitats and wildlife behavior will also be necessary.
Approaches from artificial intelligence and big data might be used to better process these heterogeneous datasets and consider a larger set of potentially influencing parameters. In the future, results might be used for more effective warning of car drivers, substituting warning signs by more precise spatial and temporal and, hence, highly dynamic warnings. To increase road safety in general, this approach might also be applied to other types of accidents.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}