1. Introduction
One of the most important issues in complex structures is designing a reliable system to safely evacuate occupants as quick as possible in cases of emergency such as fire, terrorist attacks and natural disasters. In such emergency cases, congestion, panic and confluence may occur inside the buildings when evacuees try to find an escape route instantly and unconsciously. Even worse, due to the results of growing effects of the disaster, the conditions on the escape route may change during the evacuation process. In addition to these changing conditions, taking individual features of the evacuees into account may play an important role in the evacuation.
To overcome these problems regarding changing conditions in emergency cases and individual features of the evacuees, a real-time, dynamic, intelligent and user-specific evacuation system should be designed. Such a system requires addressing fundamental functionalities such as an intelligent routing engine that produces routes for occupants, an indoor positioning system, and a mobile application that provides user interaction. However, traditional evacuation systems also do not consider either the individual features of evacuees or the changing environmental conditions in the building, and do not provide a mobile interaction [
1,
2,
3]. Therefore, they do not provide a dynamically changing escape route to evacuees in an unexpected case according to the individual features of evacuees; instead, they offer the same escape route to all evacuees regardless of their features, which poses a potential life risk.
SmartEscape provides a real-time, dynamic, intelligent and user-specific evacuation system with a mobile interface for emergency cases. Unlike past work, SmartEscape can adapt to dynamically changing conditions and calculate a personal route for an evacuee by taking his/her individual features into account. For instance, if spread of smoke on a previously proposed route starts to increase to a critical value, our system calculates a different route for an evacuee who has a difficulty in breathing, while it may not change the existing route for a healthy person. To achieve this, SmartEscape collects various environmental sensory data and considers features of an evacuee, uses an artificial neural network (ANN) to calculate personal usage risk of each link in the building, and eliminates those links that have an unacceptable risk level for the evacuee. Thus, our system can evacuate people through the shortest and the safest route.
2. Related Work
A wide range of evacuation systems has been discussed in previous work, and some have dynamic routing service, some consider individual features of the evacuees, some take the sensory data into account in the building. However, there has been no evacuation system considering all these factors together to offer a smart and dynamic escape route.
In one of the past research works, Inoue et al. designed a mobile indoor evacuation system, which produces an escape route solely at the beginning of an evacuation process, for emergency cases [
4]. However, if an unexpected incident occurs in the escape, which poses risk for the user in the route, the evacuation system must provide an alternative route rather than sticking on the first escape route.
Some human related factors have been proposed for emergency cases but still lack a convenient algorithm for routing in evacuation [
5], and this deficiency has been acknowledged by GIS researchers [
6,
7,
8]. Even though a number of research works has taken individual features of evacuees into account, those features are not sufficient for a proper navigation. While Khalifa et al. (2010) proposed an indoor navigation system to guide handicapped people in hypermarkets [
9], Tsirmpas et al. (2015) designed an elderly and blind people-oriented indoor navigation system [
10]. Blattner et al. (2015) developed an indoor navigation system, which uses a Bluetooth signal transmitter, to assist the handicapped people in a building [
11]. However, all of these mentioned studies are not designed for emergency case evacuation.
Regarding environmental factors, Chu and Wu (2011) proposed a cloud-based fire evacuation system, which locates the user through RFID technology and finds the optimum escape route regarding only a few parameters that are distance, temperature and congestion [
12]. However, those parameters are not sufficient to design an accurate and safe evacuation system. In order to create an ideal emergency evacuation system, consideration of the environmental factors, such as distance, crowd distribution, closed exits, temperature, fire growth rate, smoke inhalation, carbon monoxide density, and visibility are required.
In this study, therefore, we propose a user specific and ANN based smart fire evacuation system, which is able to consider the environmental conditions in the building along with the individual features of an evacuee. Our system produces real-time personalized instructions for evacuation through an optimum route for a person. The proposed smart fire evacuation system is integrated with a mobile application to provide user interaction and to perform an ideal evacuation process.
3. SmartEscape
As can be seen in
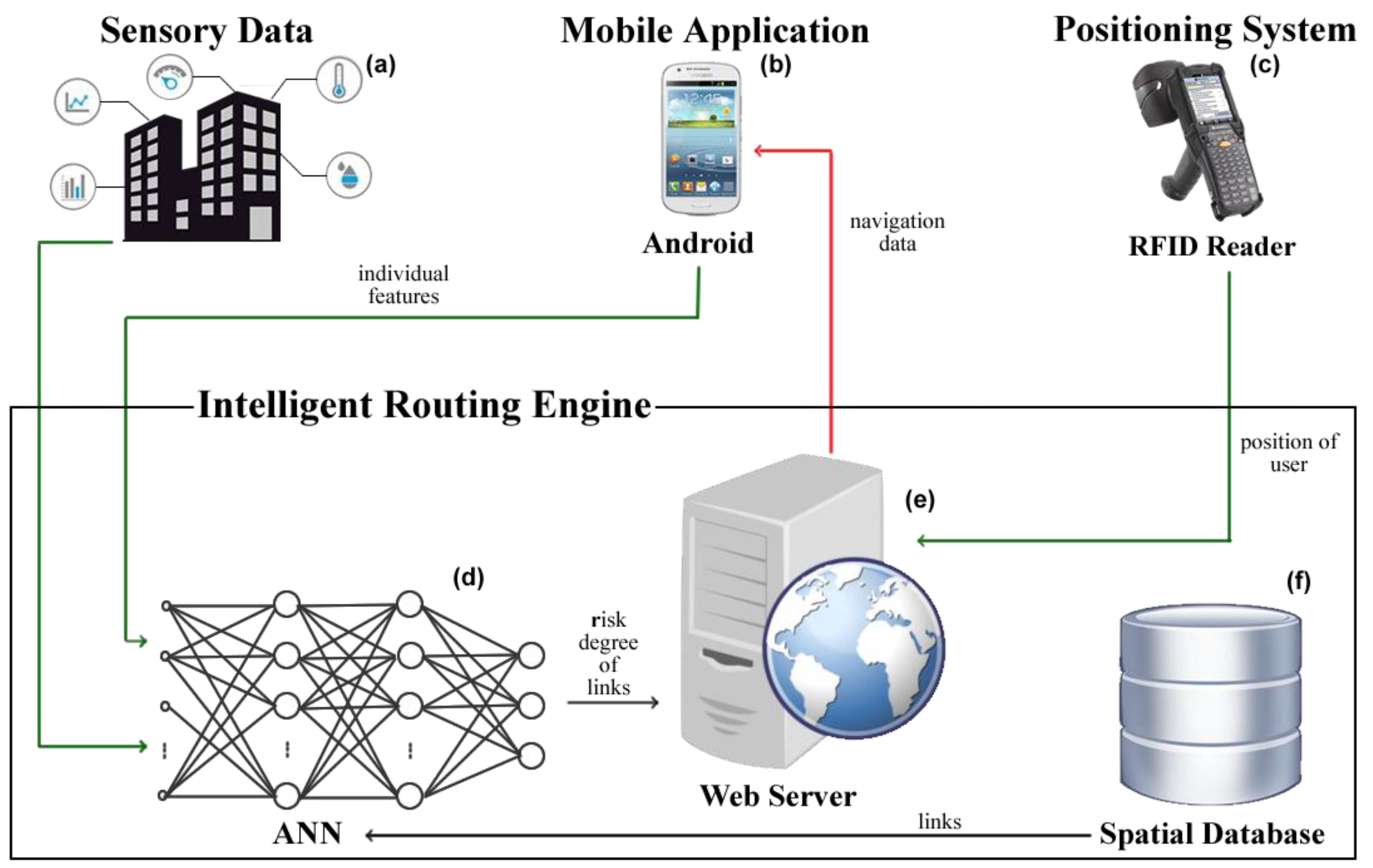
Figure 1, SmartEscape consists of four main components: sensor network, positioning system, mobile application with graphical user interface, and intelligent routing engine with an ANN on a web server. The building is assumed to be a smart building equipped with sensor network. While the sensors are sending instant measurement of the building, an RFID positioning system sends the position of the evacuee to the intelligent routing engine periodically. The intelligent routing engine takes individual features of the evacuee, which entered via an evacuee’s smartphone, and sensory data as input values. ANN defines the risk level of each link, and the intelligent routing engine calculates the shortest and the safest route for the evacuee considering all inputs, and then sends the navigation data to his/her smartphone.
SmartEscape, in general, generates a real-time navigation service by considering the personal features and real-time location of the user. SmartEscape collects various environmental sensory data (
Figure 1a), determines an indoor position of the user using RFID technology [
13,
14] (
Figure 1c), and considers formerly-entered individual features stored in an evacuee’s smartphone (
Figure 1b). Then, the collected environmental and individual data are sent to a remote server (
Figure 1e). This server runs an ANN (
Figure 1d) to determine the risk level of each link for an evacuee in the building. Later on, SmartEscape eliminates those links that have an unacceptable risk level for the evacuee. After elimination of unacceptable links, SmartEscape finds the shortest route using a set of functions provided by a spatial database (
Figure 1f). Finally, it navigates the evacuee with vocal and visual instructions through a smartphone until the evacuee reaches a proper exit.
3.1. Mobile Application
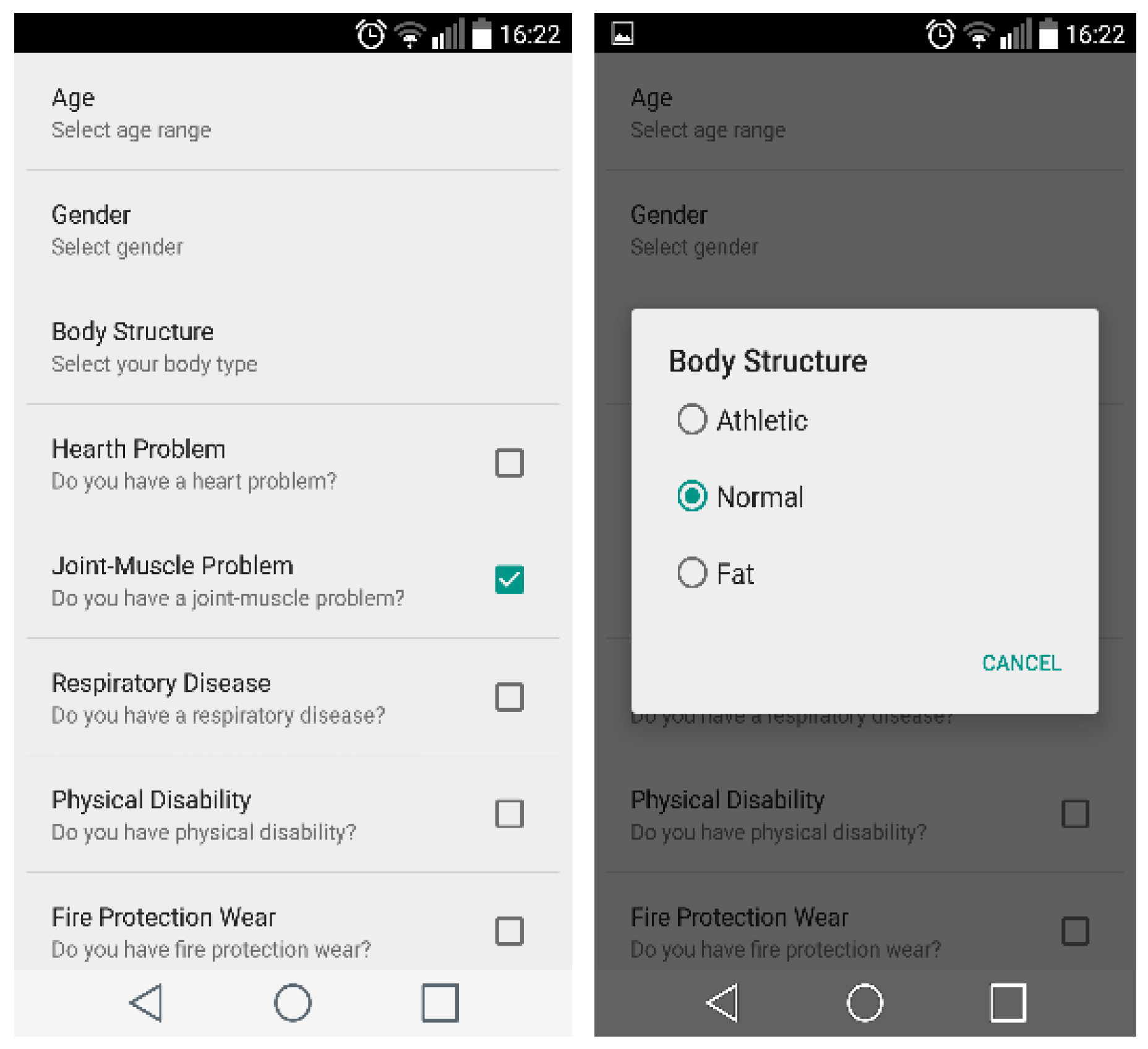
The mobile application, which has been developed for Android devices, provides an interface to get service from SmartEscape. When the evacuee runs the mobile application for the first time, s/he initially should set his/her personal features on the application (
Figure 2). Then, those features are sent to the intelligent routing engine as input parameters so that the routing engine calculates the personal evacuation route.
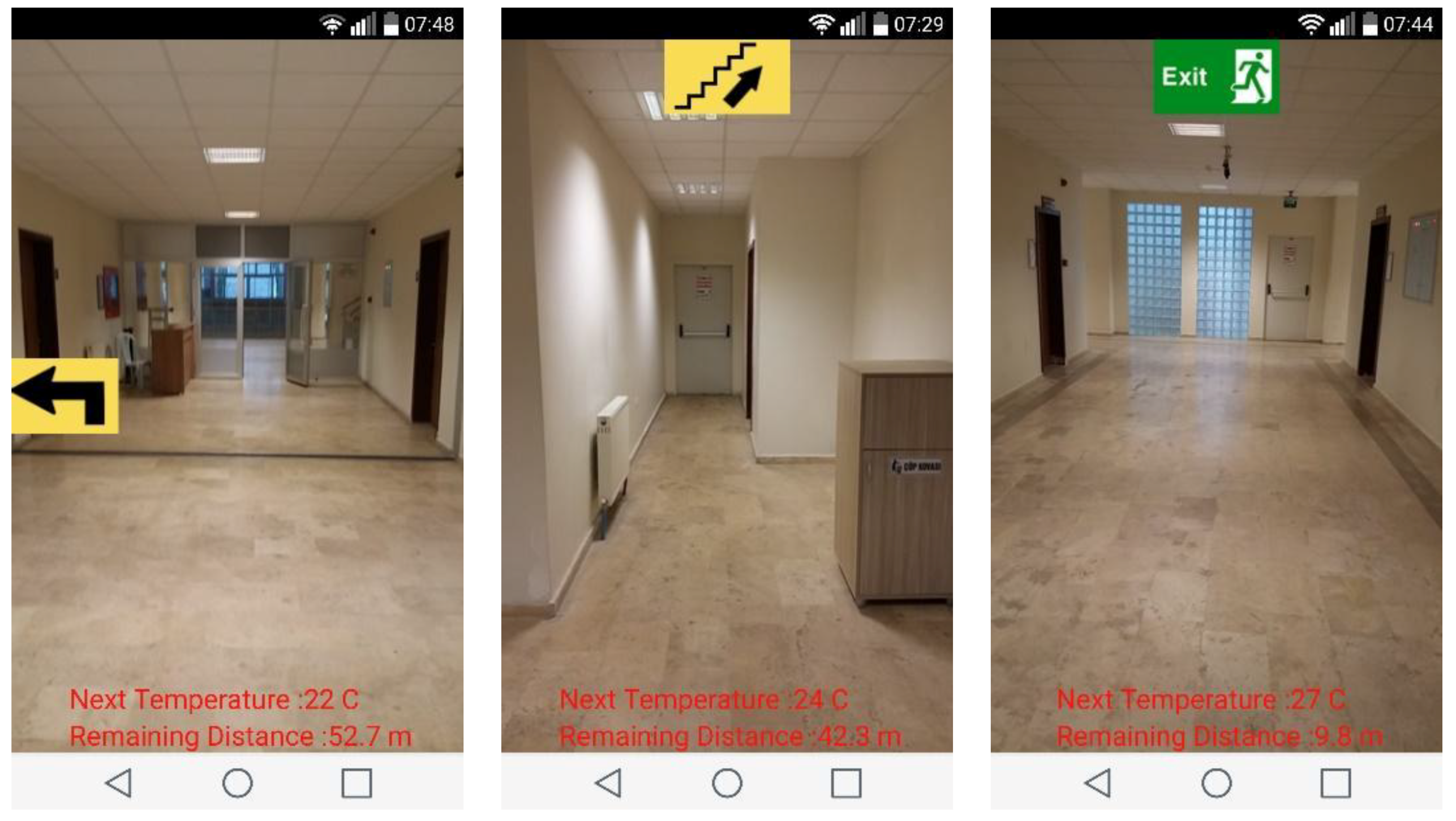
When an emergency case occurs in the building, the intelligent routing engine will send a notification to an evacuee’s smartphone in order to start the mobile application. Then, a mobile application sends a navigation request to the web server, and the routing engine periodically sends vocal and visual routing instructions back to the evacuee’s smartphone in response to this request. The visual instructions involve the indoor environmental photos and the navigation signs indicating the direction to be followed. On the other hand, the navigation directives are vocalized to reinforce the navigation services for the user. In addition, our mobile application displays texts on the screen during the evacuation process such as the temperature of the next link and the remaining distance to the exit.
3.2. Intelligent Routing Engine
The intelligent routing engine produces routes for evacuees by considering environmental sensory data within the building and the individual features of an evacuee. This routing engine utilizes an Oracle Network model that provides many functions to handle the spatial data for performing spatial analysis.
Oracle Spatial maintains a combination of geometry and graph models within the Network Data model. Oracle Network Data model provides the following features:
A data model to store networks inside the database as a set of network tables: this is the persistent copy of a network.
SQL functions to define and maintain networks (i.e., the SDO_NET package).
Network analysis functions in Java Programming Language: Java API works on a copy of the network loaded from the database. This is the volatile copy of the network.
Network analysis functions in PL/SQL (the SDO_NET_MEM package).
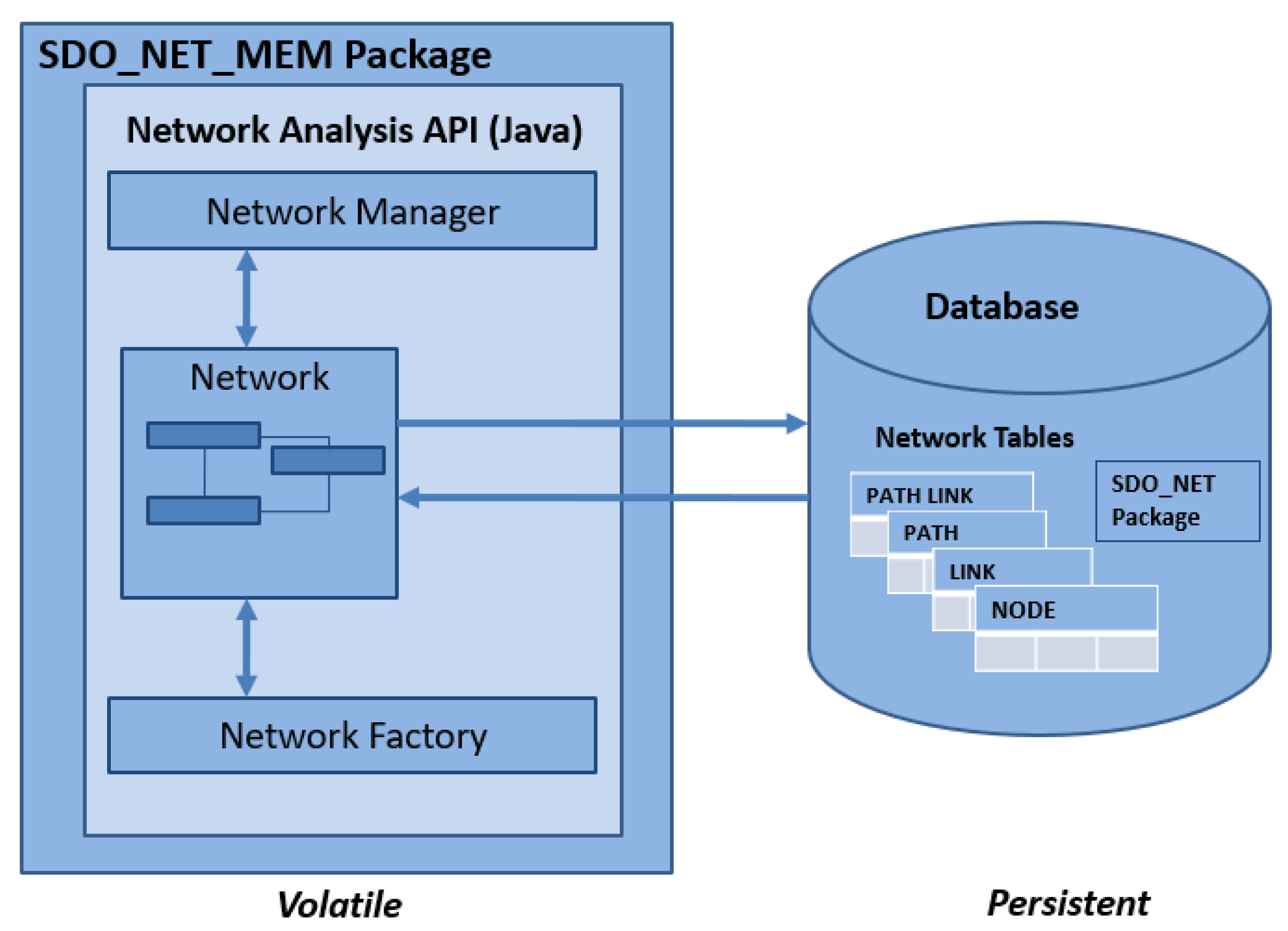
Figure 3 illustrates the relationship between the elements of the Oracle Network model.
The Oracle Network model consists of nodes and links, which are SDO_GEOMETRY objects representing points and lines, respectively. To define a network, at least node and link tables must be created, Path and Path Link tables are optional. A node table describes spatial and non-spatial features of all nodes in the network such as geometry, which is defined as a point in SDO_GEOMETRY type, node name, node type, etc. with a unique numeric identifier. A link table describes all links in the network and each link contains the identifiers of two nodes it connects. Path and Path Link tables are used to store the results of analysis [
15].
The Oracle Network model keeps a persistent data model in the database, and provides a volatile copy of this model. All spatial analysis on a network model is performed on the volatile copy. This property of the Oracle Network model provides our system to navigate each evacuee individually. Thanks to the Oracle Network model, a volatile copy of the network model is created for each user, and all navigation services are handled on this individual volatile copy in SmartEscape. In addition, unlike existing data models only representing and exchanging geoinformation used for indoor space, the Oracle Network model also provides various functions for spatial analysis on the network such as the shortest path, the nearest neighbors, nodes within cost, etc. in the Java programming language.
This section describes the design and test of the ANN model, which will be used in a routing engine to calculate the optimal evacuation route. The following subsections will describe the influential factors used in the proposed model that affect fire response performance and provide details on the dataset and structure of the proposed ANN model.
3.2.1. Influential Factors of Fire Response Performance
Kobes et al. stated that fire response performance is an important criterion in case of a fire. In fact, the degree of fire response performance in a building is generally determined by three factors listed below [
16]:
Characteristics of fire, which directly affects the degree of fire response performance, can be stated as fire growth rate, smoke, the generated heat and toxicity [
16]. Being exposed to a high temperature level may cause injuries and even death. The fire growth rate representing the heat released from the fire within a second (kW/s) is a significant factor since most of the fast spread fires result in death [
17]. While smoke effects both visibility and stamina, the density of toxic products may cause difficulties in breathing; thus, these two factors prevent an evacuee to escape during a fire [
18]. Although it is difficult to state certain values regarding these factors, Chitty and Fraser have specified some values of stamina limits in smoky environments [
17].
Another influencing factor of fire response performance is characteristics of humans, which includes a wide range of factors such as age, gender, body size, respiratory capacity, mobility, aerobic conditions, and cardiac stability. For instance, handicapped people may have constraints in the ability of reacting and awareness, thus they may move too slowly while they are escaping from a developing fire. Furthermore, physical disabilities prevent certain routes to be used by these handicapped people (e.g., wheelchairs on stairs). Another key point for survival in a fire is respiratory capacity, which is lowered by chronic diseases such as asthma or emphysema [
17,
19].
Finally, building characteristics also play an important role in fire response performance of evacuees. For instance, it is a great advantage for an evacuee being familiar with the geometry of the building (e.g., office workers). In addition, as human density in the building increases, people move slowly, which causes an increase in evacuation time [
17,
19].
3.2.2. Preparing Data for the Model
The ANN model is used for developing intelligent routing engine, of which input factors are the individual features of an evacuee and environmental sensory data. These input factors affect fire response performance as stated in
Section 3.2.1. As the first step, risk levels of each factor in the dataset have been set within the range of [
1,
2,
3,
4,
5], where 1 indicates the least risk and 5 indicates the most risk, as shown in
Table 1.
The values of the factors defined in the ANN model are categorized based on the definitions in the literature. From these definitions, the values of the factors are grouped for the ANN model. The ambient temperature parameter values are grouped according to the information given in [
18,
20]. Up to 60 °C, only sun shock effects can be seen in the human body and respiratory systems. A person is able to resist a temperature of 82 °C for 49 min and a temperature of 115 °C for 20 min. The temperature value of 148 °C is considered as the limit value for escape at the same time as having difficulty in breathing. Even though the literature does not provide a clear risk classification of temperature values, we divided temperature factors into four groups in our model, given in the first line of
Table 1, by considering above-mentioned reference values.
The fire growth rate can be defined as the heat released in time. Since many deadly fire events are characterized by rapid growth shortly after they begin, the fire growth rate is an important factor in determining the fatality of fire [
21]. The fire has been classified by National Fire Protection Association (NFPA) as ultra-fast, fast, medium and slow according to fires speeds [
22]. If the fire growth rate was in the range of 0 to 0.0001, we assumed that case as the absence of flaming fire, so we divided the values of this parameter into five groups as shown in line 2 of
Table 1, in accordance with NFPA standards.
The optical density of smoke, which is directly related to the fire growth rate, was utilized when the value ranges for the visibility parameter were determined. Visibility can be calculated using optical density of smoke [
23]. If fire growth rate category is “Very Fast” (fire growth rate 0.118 kW/s
2), the visual distance in an area with a volume of 300 m
3 after 86 s falls to 10 m. The case of fire in which sight distance goes down to 10 m in 86 s was considered as a serious risk for human evacuation. From this point of view, value ranges of the visibility parameter are divided into three groups as shown in line 3 of
Table 1.
One of the most dangerous gases emitted during the fire, which is responsible for more than 50% of the deaths, is carbon monoxide. Carbon monoxide density inhaled up to 50 ppm does not cause any adverse effect on human health. Depending on the duration of inhalation, the range of values from 50 ppm to 100 pm can be considered as the range that possible negative effects may occur. Carbon monoxide density between 100 ppm and 3200 ppm causes a loss of consciousness in max. 1 h. The value between 3200 ppm and 12,600 ppm causes a loss of consciousness in max. 30 min, and causes death if it exceeds 12,600 ppm in a maximum of 3 min. Based on these effects, the value ranges of the carbon monoxide density parameter are divided into five groups as shown in line 4 of
Table 1.
Walking speed is the sole determinant of movement time, and movement time is the only determinant of total evacuation time. When human density (human/m
2) is less than 0.8, evacuees freely move. When human density varies between 0.8 and 1.8, walking speed varies between 1.5 m/s. and 1 m/s, which allows an evacuee to walk without touching someone else. When human density varies between 1.8 and 4, walking speed varies between 1 m/s and 0.5 m/s. If human density exceeds 4, movement completely stops [
24]. We divided the value ranges of the human density parameter into four groups as shown in line 5 of
Table 1.
Three factors including Physical Disability, Alternative Ramp for Disable People and Link Type have been considered together as one factor. If an evacuee is physically handicapped, there are two other factors that should be considered along with the physical obstacle in risk calculation: having alternative ramps in the staircase of the building and the connection types (corridor, staircase, elevator) used during evacuation. For instance, if a person is physically disabled and the building does not have alternative ramps, the staircase is the riskiest option for the evacuee. Thus, this combination is evaluated to have the highest risk value of these ternary factors. In emergencies, elevators are automatically positioned on the ground floor, do not respond to floor calls, and are only open to firemen’s use. For this reason, these possibilities are ignored because there are no physically handicapped firefighters, and the risk values of the ternary factors are shown in
Table 2.
By obtaining all combinations of 16 factors, more than 49 million records have been generated. After omitting irrelevant combinations, the number of records that forms universal data set has been reduced to almost 14 million. Approximately 35 million records, which includes irrelevant combinations, were omitted. For instance, since there is no possibility for a physically disabled person to be athletic, all records including these two options together have been removed from the universal dataset. Another example is that a person with heart disease and joint muscular atrophy cannot be athletic at the same time. Again, for example, if the fire growth rate is “Very Fast”, then there is no possibility that the carbon monoxide ratio is below 50 ppm and the temperature is below 45 degrees.
To accurately calculate the risk score of each record in universal data set, each factor should be weighted to provide order of precedence. An interview has been performed with 78 people to determine the risk weights of each factor for calculating risk score. In the interview, the participants were expected to sort the factors in descending order according to the importance degree in the case of fire and give points to the factors from 16 to 1. As shown in
Table 3, no significant differences were observed among standard deviations of the model parameters. The order of precedence of the model parameters has been established by using the obtained mean values. The overall ranking was based on the total score of the participants. For instance, the physical disability parameter with the highest rating from the participants was placed in the 1st order. The least voted gender parameter was also placed in the last order.
The total score of each factor, which is calculated by using Equation (1), is regarded as penalty weight, and the total scores are sorted in
Table 4. With this interview, not only has each factor been weighted to provide priority order, but also the importance order of the factors affecting fire response performance for people has been transferred to the system:
where
N is the number of participants and
PPFi is the penalty point of the
ith factor that is evaluated by the
kth participant in the survey.
Total risk score for each sample in the input space has been calculated by weighted sum of risk values based on following formula:
where
PW is Penalty Weight (corresponding value in
Table 4) and
TRV is Transformed Risk Value (corresponding value in
Table 1). Calculated total risk scores for each sample in the input space has been grouped as shown in
Table 5. In the absence of a fire and its effects, the total risk at best (i.e., young, athletic and healthy, etc.) is calculated to be at least 10,256, and at worst approximately 13,000 (i.e., old, sick and fat, etc.). We have examined the effects of the parameters one by one, and have included those with total risk values between 10,256 and 12,000 in “VERY LOW” risk group, and those with total risk values between 12,000 and 13,000 in “LOW” risk group. In the case of fire, the effects of the parameters are grouped in a similar way, and then risk values of the links are divided into five groups.
3.2.3. Proposed ANN Model and Training
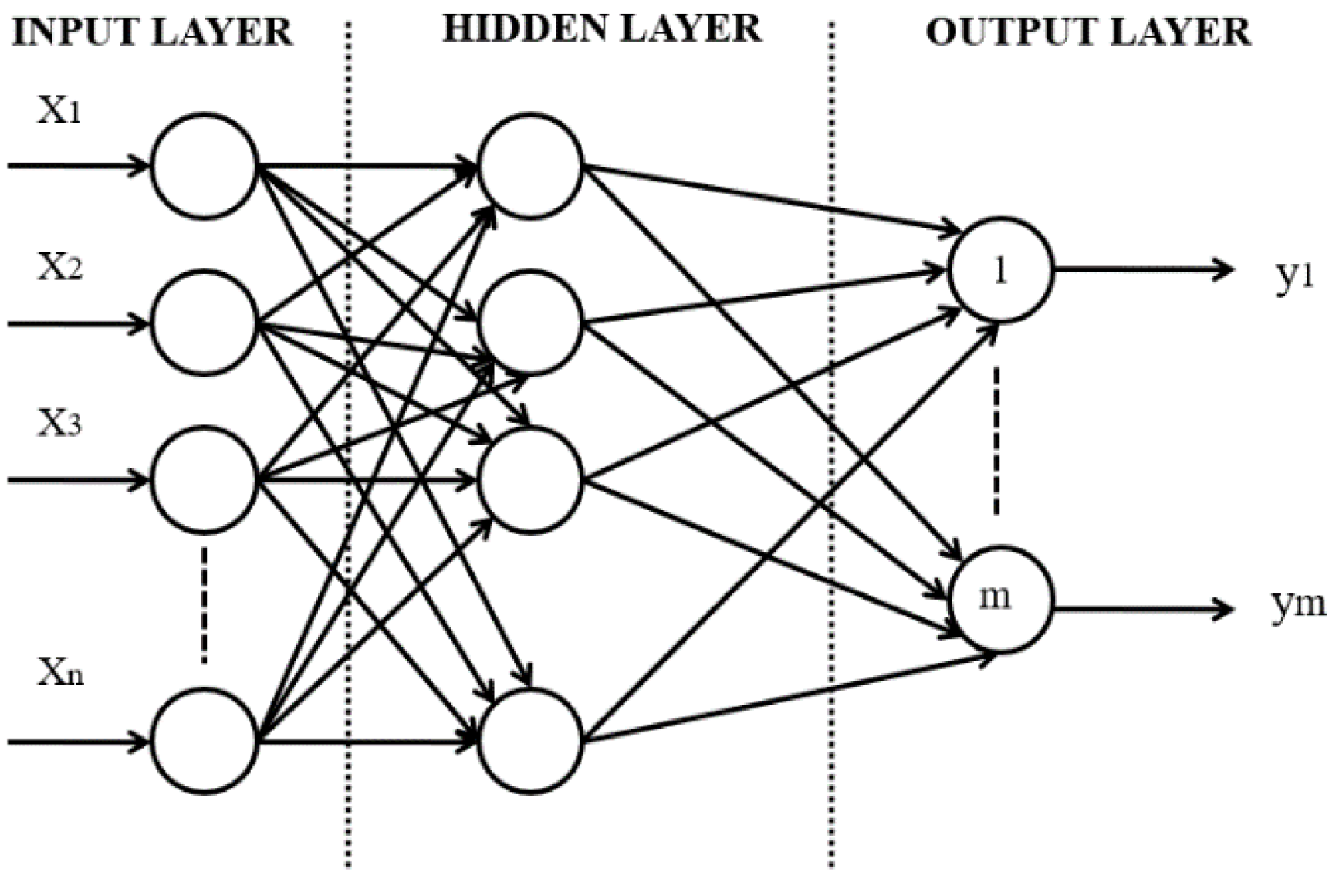
In the study, we have used Multilayer Perceptron (MLP), which is one of the most frequently used supervised neural network model for both classification and prediction. MLP includes three or more layers of processing neurons. These layers are an input layer, one or more hidden layers and an output layer (
Figure 4) [
25]. Input layer neurons are responsible to pass the input signals to hidden layer neurons without any change. Hidden and output layer neurons are processing units whose outputs are calculated by an activation function. Finally, the output layer produces the classification results.
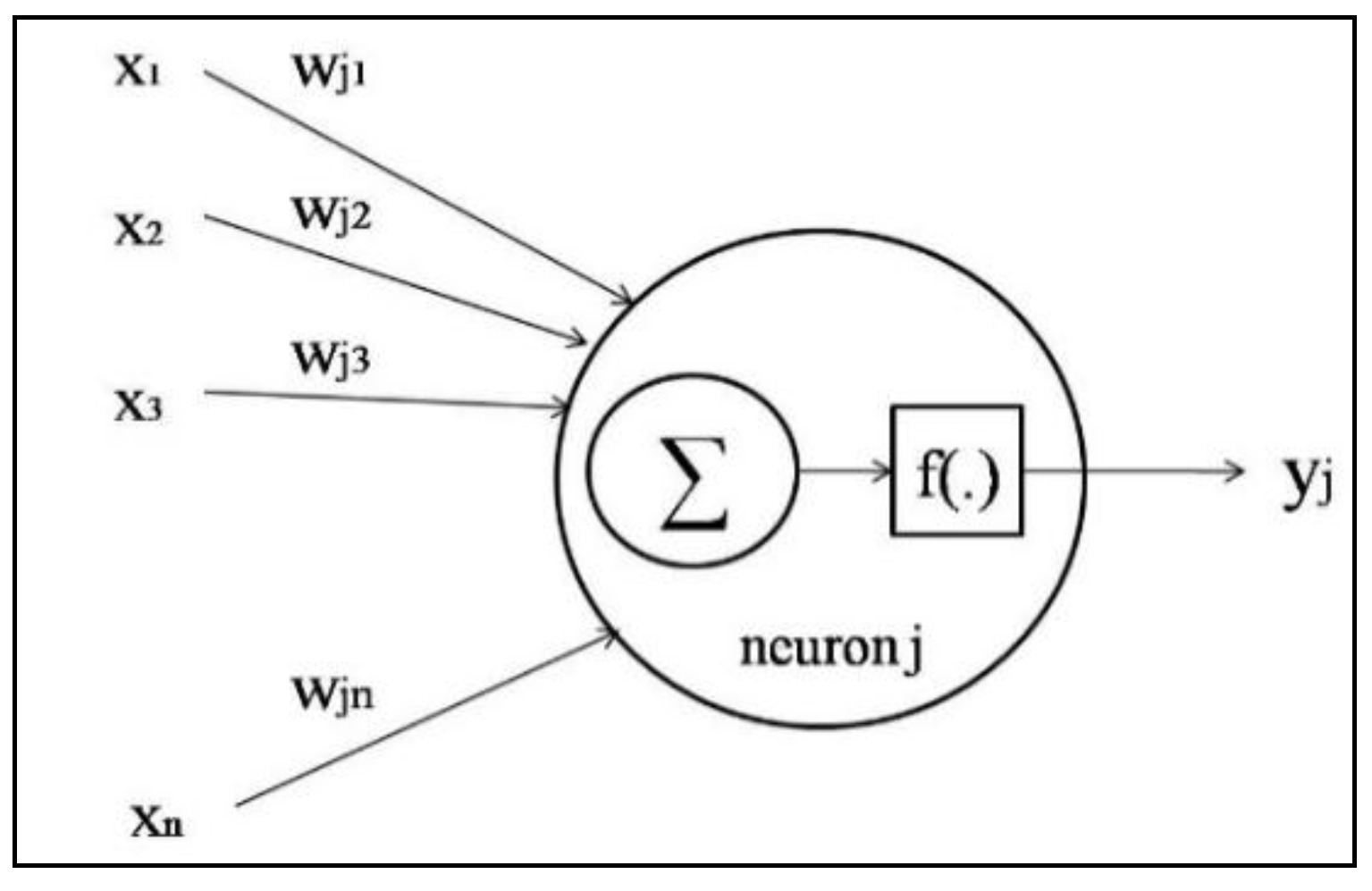
In the MLP, each neuron
j in the hidden layer computes the sum of input
xi weighted by respective connection weight
wij and calculates its output
yj as a function of the sum (
Figure 5):
where
f is the activation function that transforms the weighted sum of all signals to a neuron as multiplier. Here, activation function (
f) can be a nonlinear differentiable function such as a sigmoidal or hyperbolic tangent. The sum of squared errors is used as performance measurement and is computed as follows:
where
dj is desired value and
yj is the actual value of output neuron
j. All weights of MLP
wij are tuned according to the selected training algorithm to decrease error (
e) [
26,
27].
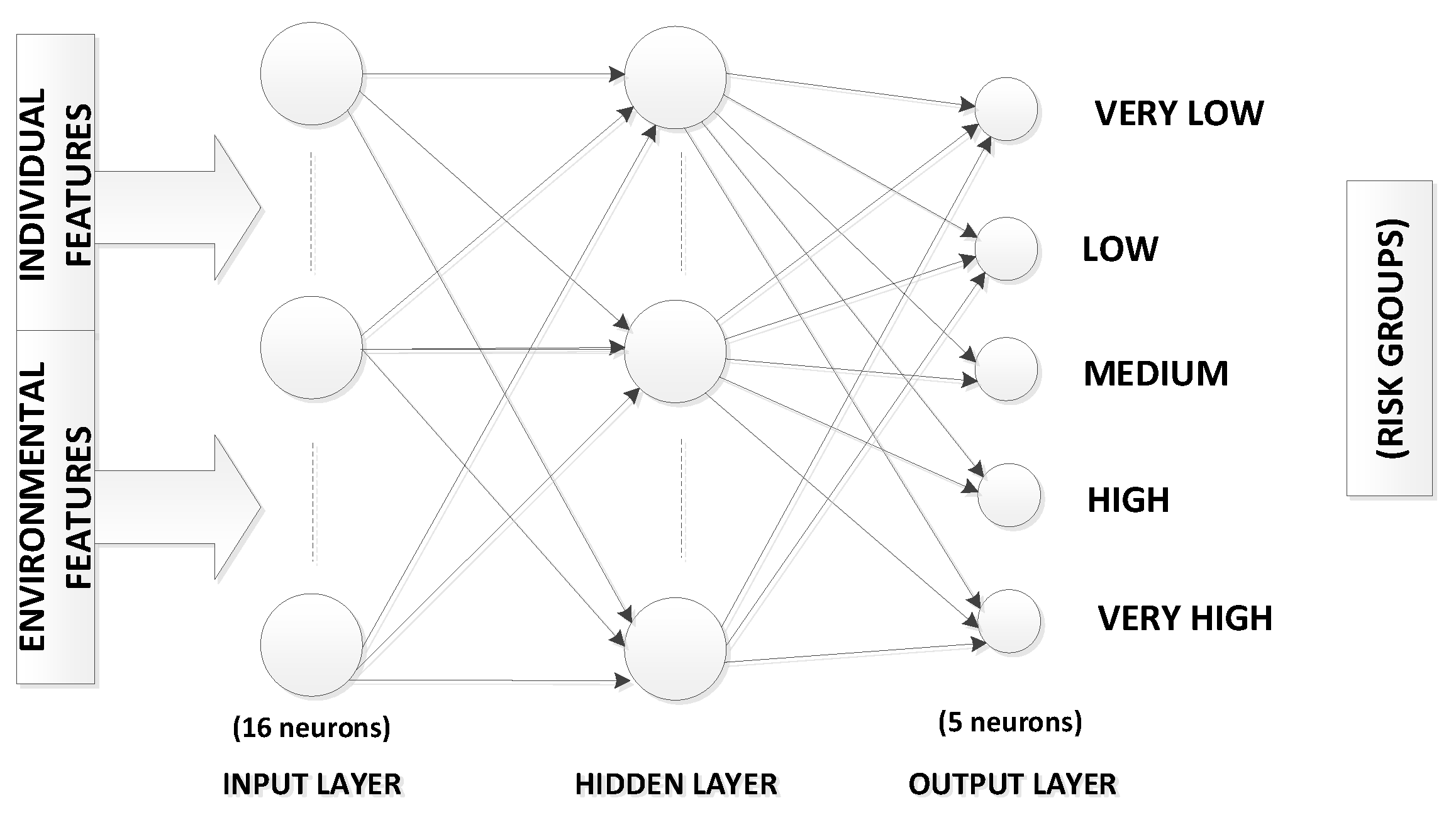
In the proposed ANN model, the neurons in the hidden and output layers use the Logistic Sigmoid function, which is one of the most preferred fast differentiable activation function for solving nonlinear problems since it produces a continuous output between range [0, 1]. This continuous output can be interpreted as probability of an event. The proposed ANN model has 16 inputs including individual and environmental factors and five outputs for estimating usage risk of each link in the building. Usage risks for a link are divided into five categories and each of them is represented by one output neuron in the ANN model (
Figure 6). In our ANN model, the output neuron that produces the highest probability (closest to 1.0) represents the category of risk level. For instance, if outputs of ANN are 0.1, 0.3, 0.2, 0.8, and 0.5, respectively, the fourth output (0.8) of ANN that is closest to 1.0 is selected as the estimated risk that falls in a “HIGH” risk group for the sample input.
The number of hidden layers and neurons in hidden layers are important performance criteria for feed-forward ANN. Another point that affects the performance of an ANN is the learning algorithm. In order to determine the optimal architecture and the best learning algorithm for the designed ANN, a series of training and test processes have been performed with various designs and training parameters. In the training phase, 30,000 randomly selected records from the universal set have been used. To show the success of ANN accurately, three different test sets have been prepared, each having 1000 records that are randomly selected from the universal set and not used in the training phase. A random sampling method of cross validation process has been applied. In the learning phase, Levenberg–Marquardt [
28], Resilient Propagation [
29] and BFGS-Quasi Newton [
30] learning algorithms were applied, and the success rates of each algorithms were found as 98.1%, 94.2% and 96.8%, respectively. As a result, Levenberg–Marquardt, which combines the gradient descent and the Gauss–Newton minimization methods to solve nonlinear least squares problems, was selected since it has a better success rate compared with other algorithms.
SmartEscape reached 98.1% accuracy for predicting risk levels of links in the building for evacuees. Instead of using such an ANN, using a rule-based approach, which uses a predefined set of rules to make deductions or choices, would be 100% accurate; however, such an expert system needs to analyze all possible options, which causes a calculation of millions of data to generate optimum routes. This computationally expensive operation does not allow our evacuation system to generate routing instructions in real time without any latency. In a fire case, such a latency causes an intolerable delay, which cannot bring an evacuation system to use in real life.
3.2.4. Intelligent Routing Process
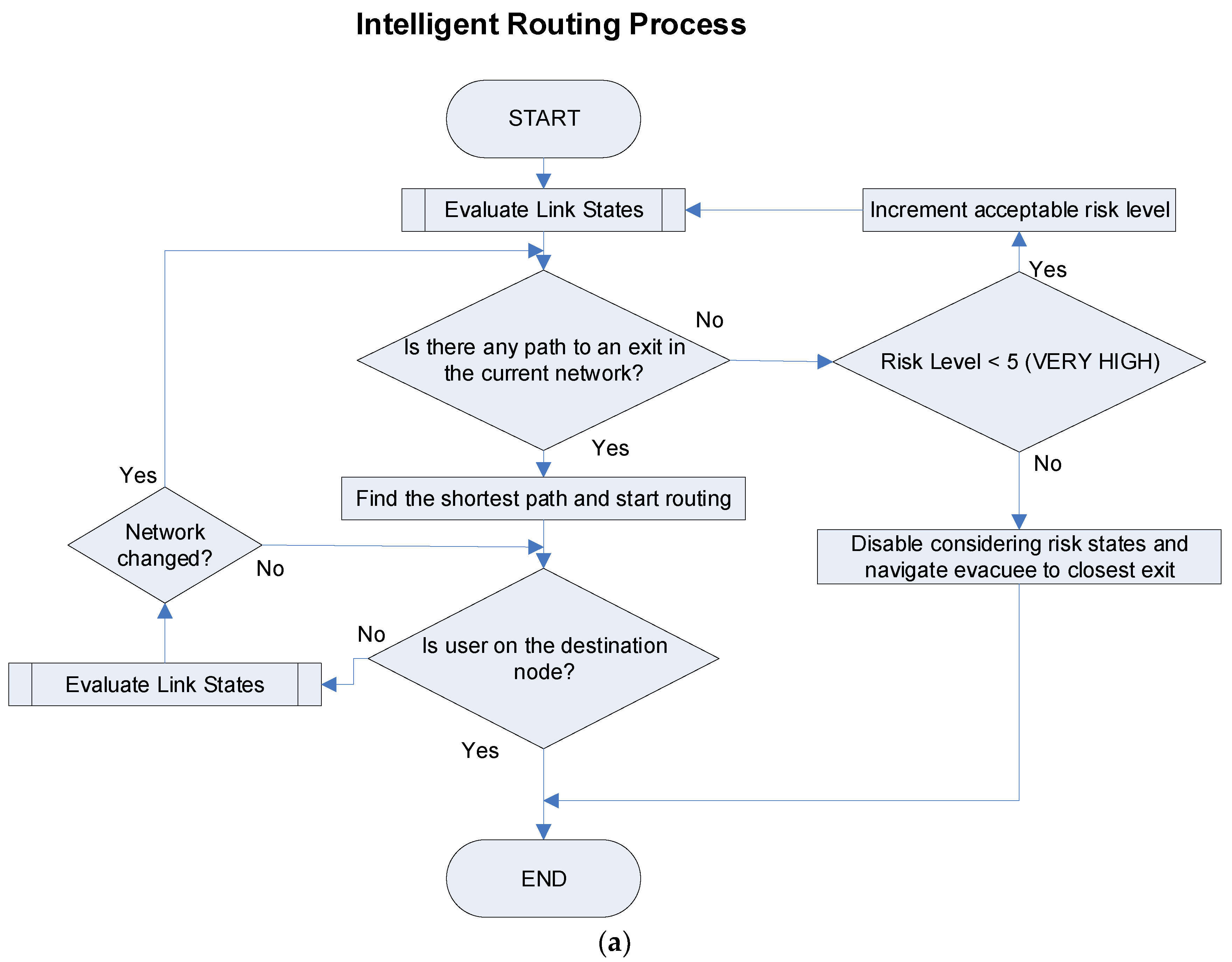
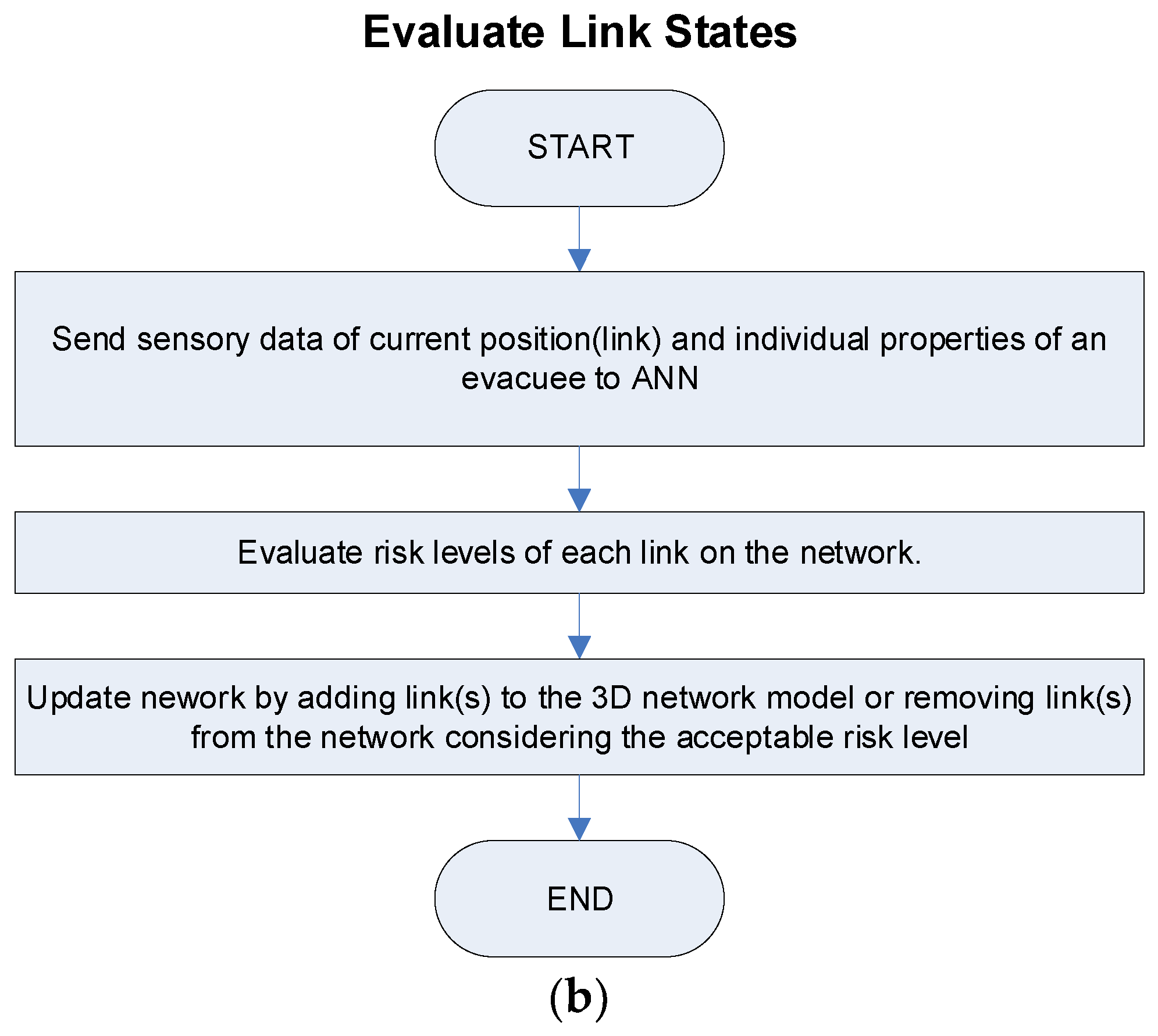
We have integrated our ANN model to the routing engine for an evacuation system. In the proposed ANN model, environmental input values such as fire growth rates, temperatures, visibilities, and human density values have been produced by a simulation within a scenario for all the links. Thus, the ANN predicts dynamically changing risk states of all links during the evacuation process. For a better understanding, an intelligent routing process is explained briefly by a flow chart given in
Figure 7.
SmartEscape sets the acceptable risk level as “LOW” at the beginning of the evacuation process. When the fire is detected, SmartEscape sends a notification to the evacuee’s smartphone and starts a real-time navigation service for the evacuee by providing a shortest escape route using only the links having “VERY LOW” and “LOW” risk levels excluding other risky links from network. After starting evacuation, the mobile application sends requests to the SmartEscape at two-second-intervals and demands the navigation data. At each request, SmartEscape evaluates risk levels of each link on the network and updates the network by enabling and disabling links in the network model according to the acceptable risk level. As a response, our system sends navigation data that includes the image of indoor space and the navigation instructions to the evacuee. The mobile application can retrieve the navigation data approximately in 120 ms on an internet connection with 14.2 Mbps bit transfer rate. We added 1880 ms as latency tolerance for probable internet slowdown, and set a request frequency as two seconds to provide real-time navigation services.
If a risk level of any link on a previously found route exceeds acceptable risk level, SmartEscape updates the network and finds an alternative route to the exit. If an evacuee is stuck in a link with a current acceptable risk level, and if there is no route to an exit using current network, SmartEscape increases the acceptable risk level one up as well as updates the network topology according to the new acceptable risk level, and then calculates a new route for an evacuee. The worst case for an evacuee is to be stuck in a link that has maximum acceptable risk level. In such a case, since the current acceptable risk level is already at the maximum, SmartEscape takes all the risks to rescue the evacuee and finds the shortest escape route to an exit regardless of risk states of links.
4. Fire Evacuation Case Study
In this study, we determined the important points for indoor navigation in the building as nodes, and the connections between these nodes as links. The rooms, classrooms, and some specific points in the corridors were determined as nodes. These nodes have a significant role for indoor navigation of occupants since the navigation system produces instructions when an occupant reaches a node. Ceilings of all the nodes were equipped with RFID tags along the building. The 3D coordinates of each tag, which are considered as node coordinates, were measured by a total station device. Link lengths were calculated by computing distances between nodes, and all data related with the nodes and the links were stored in a spatial database. We tested performance of SmartEscape in a 10-floor building with two exits, which includes 985 nodes and 1182 links.
4.1. Fire Evacuation Scenario
As for a fire evacuation scenario, we have prepared a simulation that produces emergency case events randomly and updates their states periodically. These states or, in other words environmental sensory data, are considered as input data for SmartEscape. A sample scenario has been prepared for three evacuees whose individual features are shown in
Table 6.
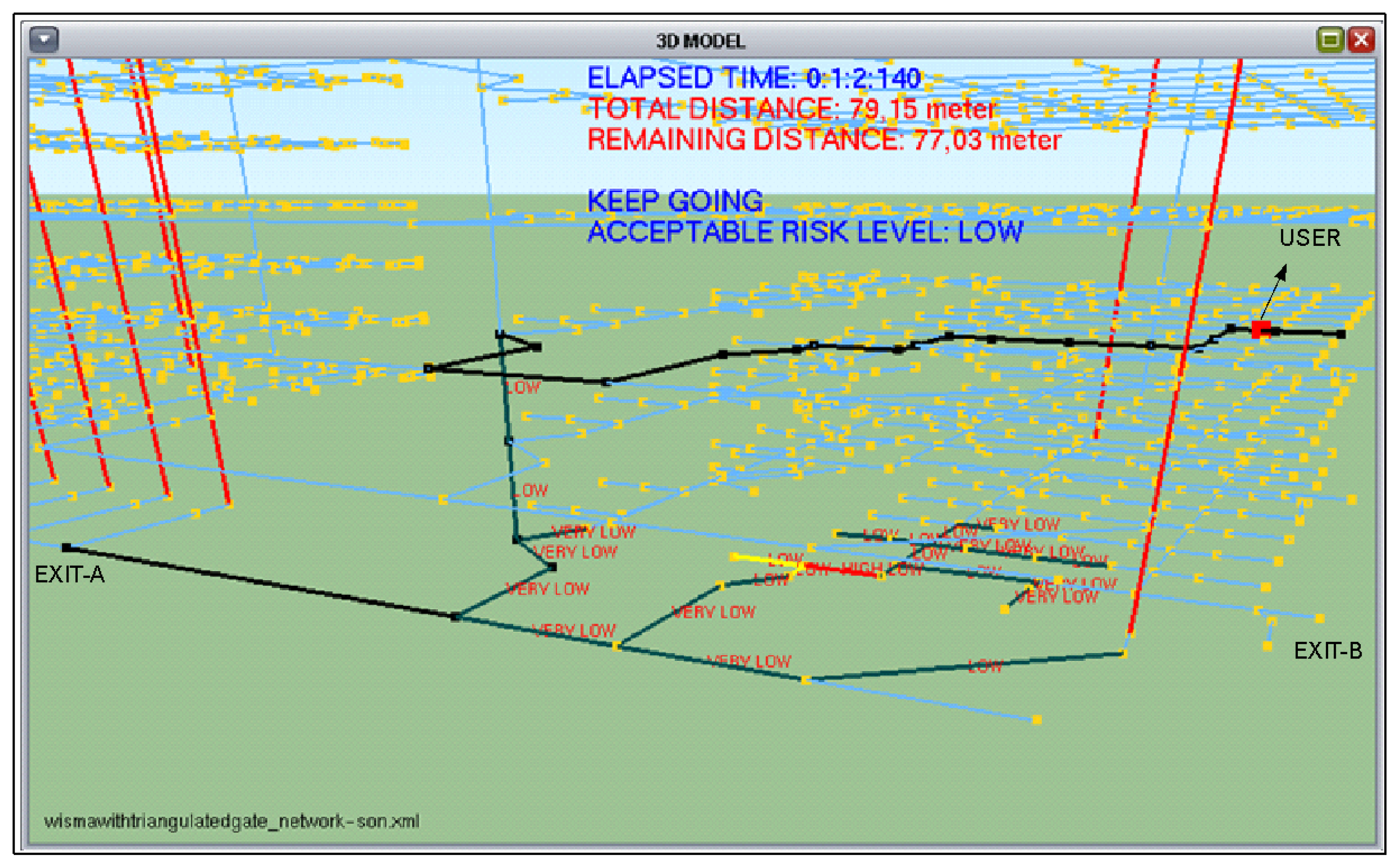
According to our scenario, Evacuee-1 is considered as an occupant in the 2nd floor of the building, and the fire occurs in the ground floor and smoke expands to upper floors very quickly. The predicted risk levels are displayed on each link, as seen in
Figure 8, for the Evacuee-1 in 62 s after simulation runs.
Evacuee-1 was evacuated from Exit A in 228 s. As can be seen in
Figure 9, three sample screenshots were taken from his smartphone during the process. Similar to Evacuee-1, Evacuee-2 and Evacuee-3 were guided to exits through different escape routes according to their individual features.
4.2. Results of the Fire Evacuation Scenario
After performing the simulation, we have prepared a set of charts and tables to show the benefit of SmartEscape in terms of evacuee’s safety.
Figure 10,
Figure 11 and
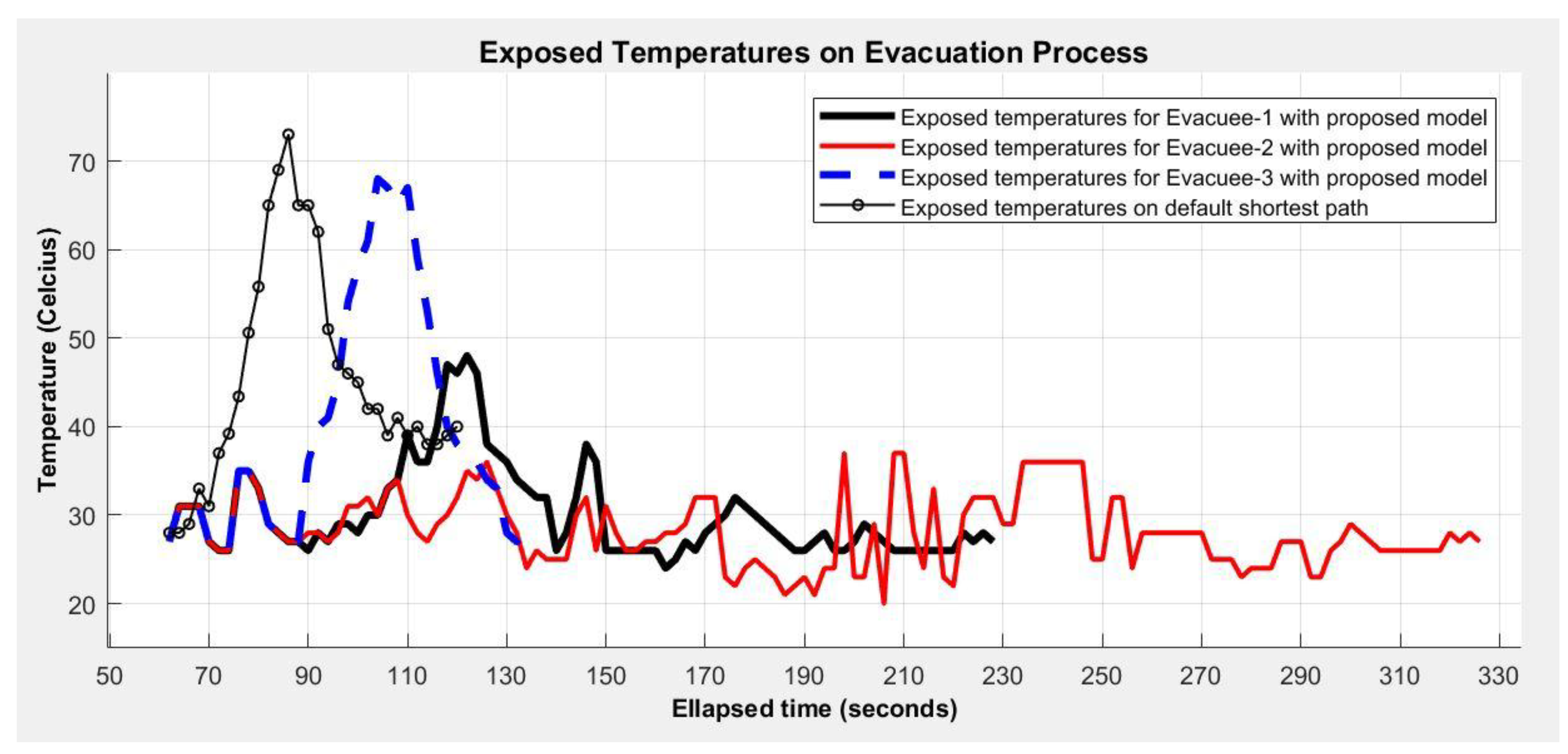
Figure 12 show temperatures, carbon monoxide densities, and visibilities of the traversed route by three different evacuees. In addition, we have compared SmartEscape with a non-intelligent evacuation system. The non-intelligent evacuation system guides the evacuees to the closest exit through the shortest route without evaluating environmental effects and individual features of evacuees in a fire case. This means that instructions of such systems are not always safe for an evacuee. It is clear that the worst scenario for a non-intelligent evacuation system is to deal with a fire case that starts on a previously calculated route. In this case, a non-intelligent evacuation system will force the evacuee to proceed on the fired-route. As can be seen in
Figure 10, SmartEscape navigated all evacuees to the closest exits through the routes that have lower temperatures than the default shortest path. In
Figure 10 and follow-up figures, the default shortest path implies the calculated escape route by a non-intelligent evacuation system.
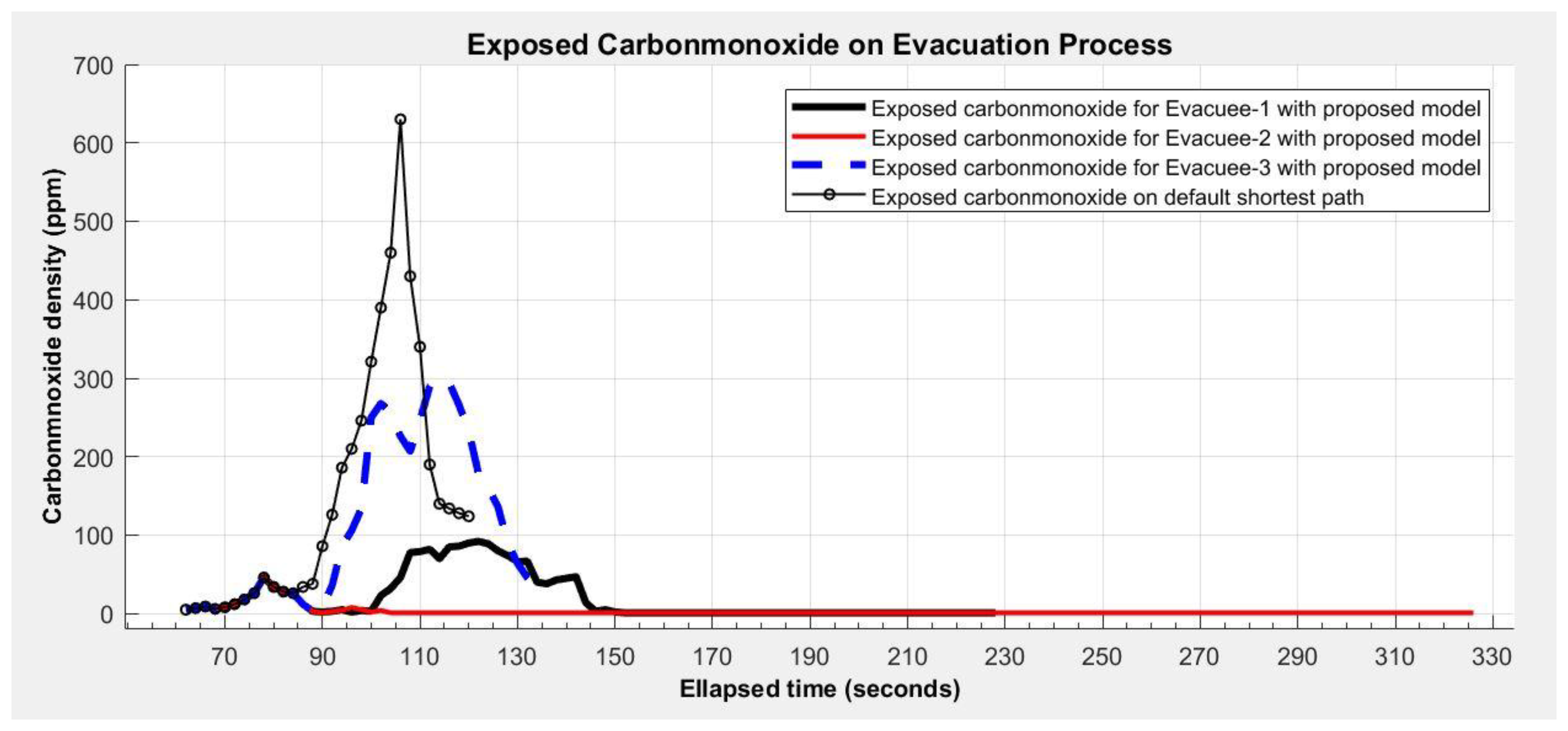
Figure 11 shows a carbon monoxide density–time chart, where Evacuee-2 with a respiratory disease has been evacuated using clear links that has nearly zero carbon monoxide density at all. Unlike Evacuee-2, Evacuee-1 and Evacuee-3 have used links that has carbon monoxide density in some periods of time during the evacuation. Evacuee-3 who has fire protection equipment has been evacuated in 136 s using links having more carbon monoxide density than the links that are used by others. SmartEscape has navigated all the evacuees through the routes that have less carbon monoxide density than the default shortest path, when we compare it with a non-intelligent evacuation system in terms of carbon monoxide exposure.
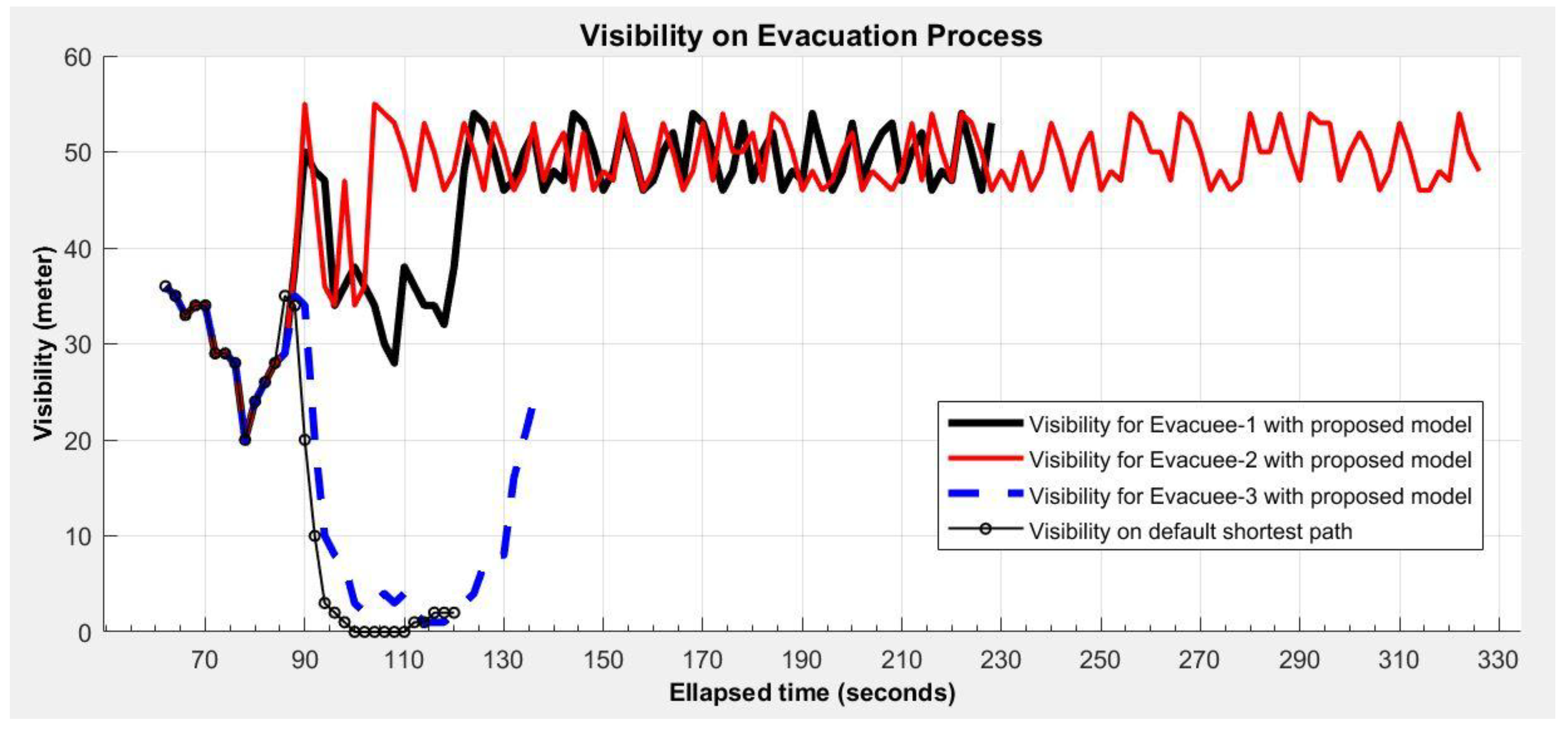
As seen in the visibility–time chart given in
Figure 12, although visibility value for Evacuee-3 decreased below 1 m due to smoke between 110th and 130th s of his evacuation process, the system navigated him by taking all the risks since he had fire protection and light equipment. Evacuee-1 and Evacuee-2 have been navigated through more clear routes of which visibilities are more than 20 m. When we compare a non-intelligent evacuation system with SmartEscape in terms of visibility, SmartEscape has navigated Evacuee-1 and Evacuee-2 through routes whose visibilities are far higher than the default shortest path.
Table 7 summarizes temperatures, carbon monoxide density and visibility values on traversed routes of all three evacuees, and compares non-intelligent model with SmartEscape in terms of results. As can be seen in
Table 7, SmartEscape navigated all evacuees through a safer route considering environmental factors and evacuees’ features, while a non-intelligent model navigated to the shortest paths regardless of both of those parameters. For instance, route lengths for all evacuees offered by SmartEscape, which are 169.4 m for Evacuee-1, 266.5 m for Evacuee-2, and 62.6 m for Evacuee-3, were longer than the route offered by non-intelligent model, which is the shortest (47.5 m) yet the most dangerous one. This is because SmartEscape acts differently for each evacuee by considering his/her stamina against the environmental factors caused by fire, and creates the safest yet possibly longer route. Regarding carbon monoxide density, while SmartEscape offered the most dangerous route with 110 ppm for Evacuee-3, who only has fire protection equipment, among all evacuees, the non-intelligent model offered 147.9 ppm, which is a more dangerous route than the worst one offered by SmartEscape. During the evacuation process, Evacuee-2, who has expiratory disease, heart disease, and joint-muscle disease, therefore having the least stamina, has been exposed to the least average carbon monoxide density (2.8 ppm) and average temperature (28.2 °C). The rest of the results given in
Table 7 for all the evacuees can be considered in the same manner with interpretation of route length, temperature, visibility and carbon monoxide density.
5. Result and Discussion
The tables and charts mentioned above show the benefit of SmartEscape in terms of evacuees’ safety regarding how the people affected during evacuation in various environmental factors such as temperature, carbon monoxide density, visibility, and human density. Results showed that our system could help people for a fast and safe evacuation considering their individual features.
The intelligent routing engine, a component of SmartEscape, guided evacuees as needed through smoke-filled areas. Despite a route looking dangerous, using sensory data, SmartEscape directs the evacuee to this route rapidly by considering its risk level, and evacuee’s stamina that can overcome such a risk. For instance, an evacuee may give up an escape through a route by relying on visibility, when s/he sees a smoke-filled link in this route. However, the rest of route could be shorter and safer than other available routes. This means that an evacuee should trust SmartEscape and obey all its instructions with no hesitation, since it provides real-time, smart, user-specific routing instructions based on sensory data. On the other hand, if all evacuees in a building use SmartEscape in a fire case, it will be possible to avoid a bottleneck by distributing evacuees to different exits and shortening the total evacuation time.
SmartEscape navigates the evacuee on a smartphone without requiring detailed equipment. The limitation of the system is that the evacuee needs a hand-held RFID reader during the evacuation process to acquire an evacuee’s location in real time. However, supposing that the smartphones will have RFID technology in the near future as they already have NFC (Near-Field-Communication) technology today, it is assumed that this limitation will be eliminated. Another limitation of our system is connection failure to the wireless network of the building, which can be damaged in the fire. In that case, SmartEscape receives service from a remote server over an LTE internet connection. Therefore, the system continues to operate even if the wireless network infrastructure of the building is completely collapsed in the fire. Even though collapse of LTE is a very rare occurrence, evacuation will continue over the last shortest route offered by SmartEscape in such a case.
Our system constructs an individual escape route for each evacuee simultaneously, resulting in guidance to a great number of people who get navigation service on their smartphone in a typical evacuation scenario. Our server creates a distinct network model for each evacuee. This means that a SmartEscape-based workload can be stated as (size of network model x number of evacuees). A set of tests showed that a network model with 1000 nodes occupied 1 MB of memory space, which means that, even if 1000 evacuees simultaneously connect to the system, such workload costs approximately 1 GB of memory on the server side. This indicates potential of our system in guiding a large amount of people conveniently, most importantly, with low-resource usage in a typical large-scale fire evacuation scenario.
In case of fire disaster, a crisis management center for monitoring and controlling the evacuation process can be established based on SmartEscape, and this can be considered as a contribution of our proposed system to the Building Information Model. SmartEscape accesses the personal features of all connected users and environmental conditions in the building through this management center in real time. Thus, in case an evacuee needs additional support, a professional team can be directed to rescue the evacuee. For instance, a 60-year-old evacuee, or one with respiratory disease or physical disability can be traced through this system and intervened with if necessary. As another example, if an evacuee stays still due to losing consciousness or being stuck in the fire, the rescue team can get access to the evacuee in a more convenient way.
Overall, SmartEscape, with its high accuracy, support for a great number of users, and low-resource usage helps people with a fast and safe evacuation while taking their individual features and environmental conditions into account.
6. Conclusions
We designed and evaluated SmartEscape, a real-time, dynamic, intelligent and user-specific evacuation system with a mobile interface for emergency cases such as fire. In such emergency cases, due to the results of the growing effects of fire, the conditions of the escape route may change during the evacuation process. In addition to this, congestion, panic and confluence in evacuees may cause them difficulties in finding an escape route in the building. Therefore, SmartEscape uses an artificial neural network (ANN) to compute personal usage risk of each link along the route, and eliminates improper ones that have a risk level for the evacuee by collecting various environmental sensory data and evacuee’s features. Thus, it can evacuate each individual evacuee through the shortest and the safest route.
Results show that SmartEscape serves as a straightforward, accurate and rapid evacuation system, which is capable of navigating people through optimum user-specific routes (i.e., the safest and shortest route), considering environmental conditions and their individual features. Even though it has been shown that SmartEscape functions properly for evacuation in fire incidents, it can be modified adequately to serve some other emergency cases by simply identifying relevant features.
As future work, we plan to determine the node coordinates and link lengths from the floor plan of the building instead of measuring them with total station devices. First, an image processing technique that detects the lines in the floor plan can be developed to extract the rooms, corridors, stairs and so on. Then, it creates a link-node topology of the building by considering rooms as nodes, both corridors and stairs as links. In this way, SmartEscape generating a graph as a network model of the building without manual intervention will be more comprehensive and practical.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}