A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting




Abstract
1. Introduction
2. Methodology
2.1. Construction of Space-Time Cuboid
2.2. ST-KNN Model
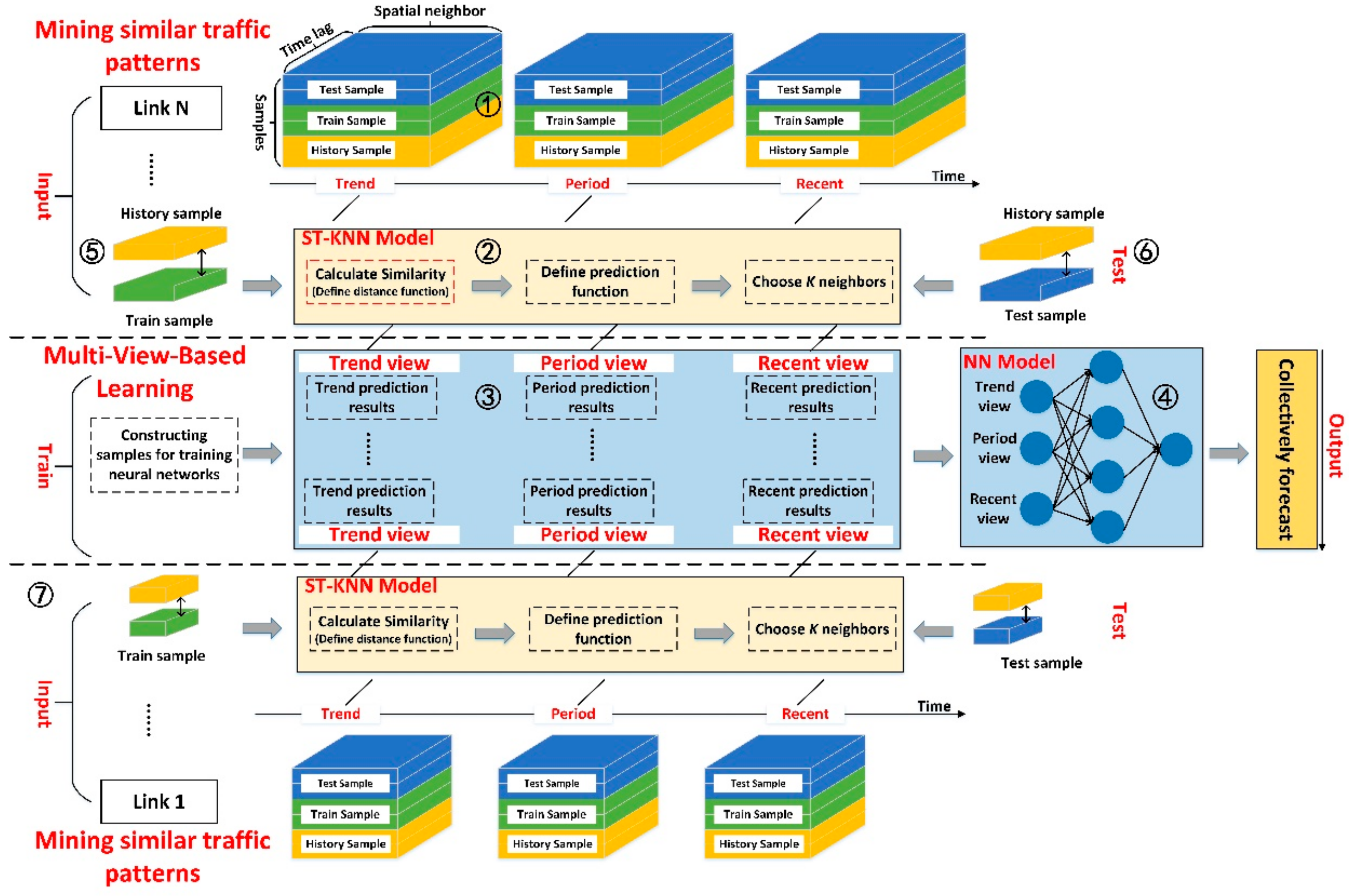
2.3. Multi-View-Based Learning
| Algorithm 1: Training of MVL-STKNN |
| Input: Near spatiotemporal cuboids: ; |
| Periodic spatiotemporal cuboid: ; |
| Trend spatiotemporal cuboid: ; |
| Lengths of closeness, period, trend: ,,; |
| Number of candidate neighbors: ; |
| Parameter of Gaussian function: . |
| Output: MVL-STKNN model . |
| // construct training instances |
| 1 |
| 2 For all time interval in the training spatiotemporal cuboids |
| 3 // |
| 4 = ST-KNN() // |
| 5 = ST-KNN() // |
| 6 = ST-KNN() // |
| 7 Put a training instance into |
| 8 End for |
| // Training the model |
| 9 // Neural network training |
| 10 Output the learned MVL-STKNN model |
| Algorithm 2: Prediction of MVL-STKNN |
| Input: Near spatiotemporal cuboids: ; |
| Periodic spatiotemporal cuboid: ; |
| Trend spatiotemporal cuboid: ; |
| Lengths of closeness, period, trend: ,,; |
| Number of candidate neighbors: ; |
| Parameter of Gaussian function: . |
| Output: Set of test sample predictions: . |
| 1 For all time interval in the test spatiotemporal cuboids |
| 2 // |
| 3 = ST-KNN() // |
| 4 = ST-KNN() // |
| 5 = ST-KNN() // |
| 6 // Obtain the predicted values |
| 7 Put into // Save the predicted values into set |
| 8 End for |
| 9 Return the set of predictions |
3. Performance Evaluation
3.1. Data Preparation
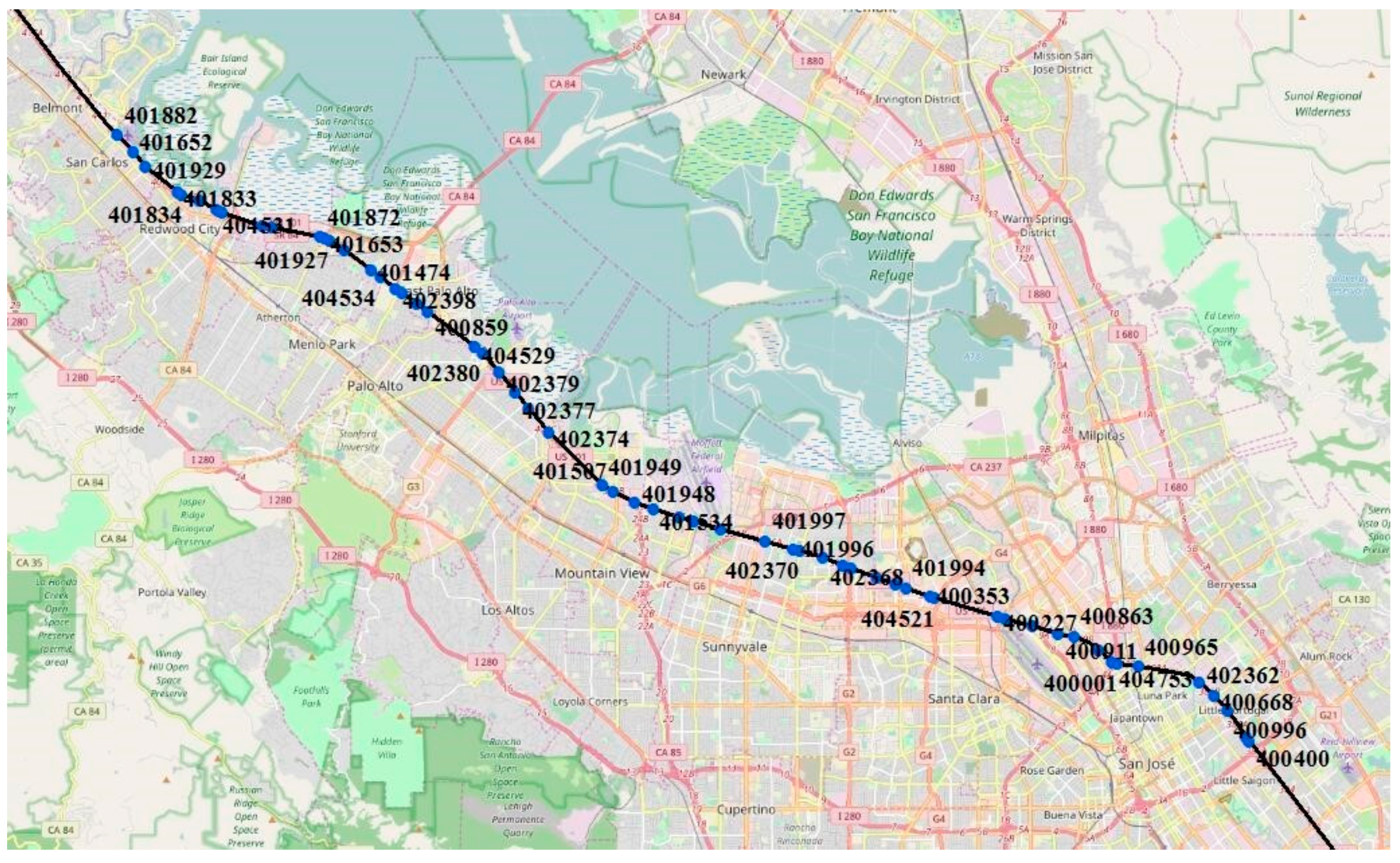
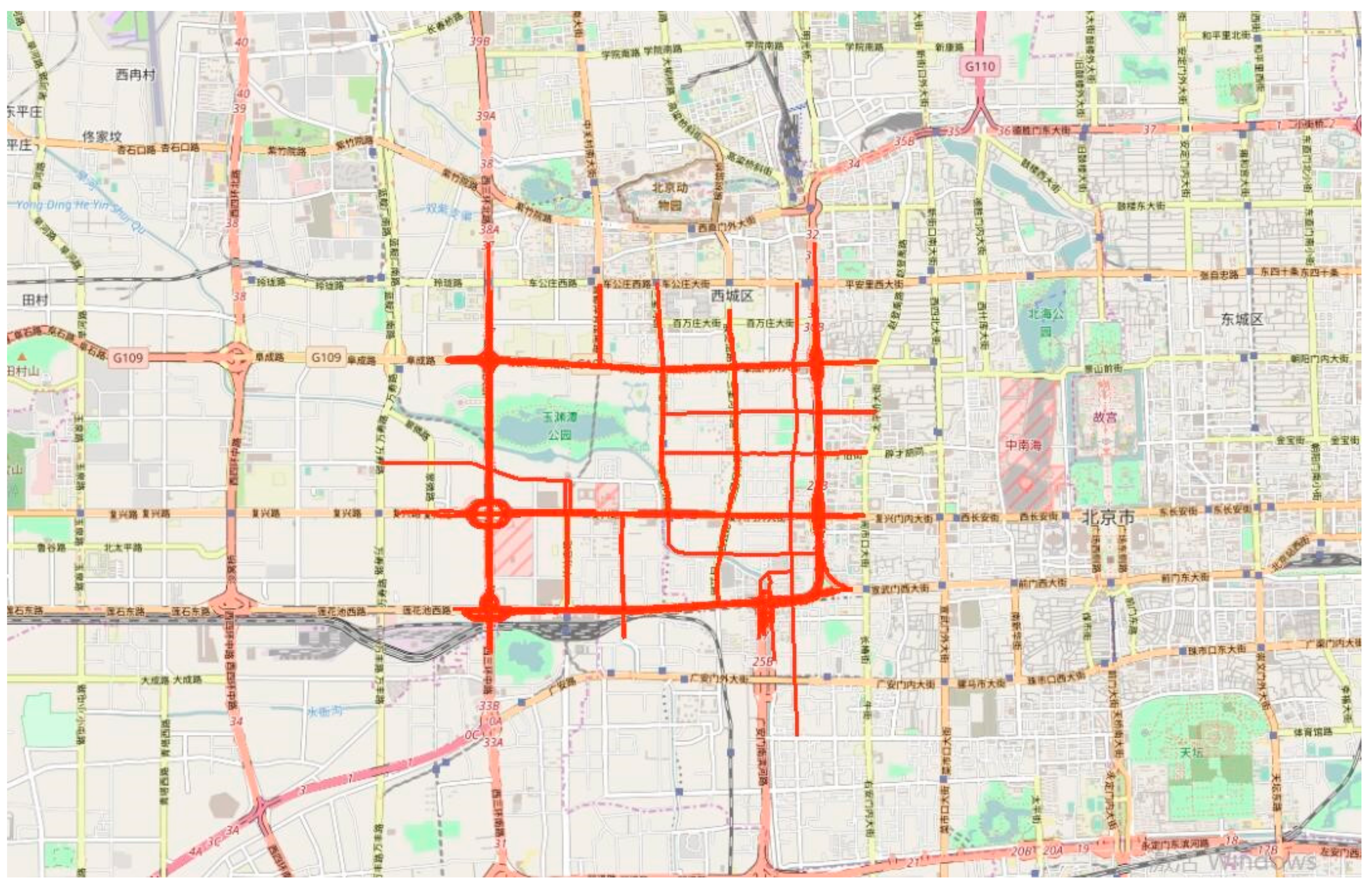
3.1.1. Data Sources
3.1.2. Data Processing
3.2. Evaluation Metrics
3.3. Variable Estimation
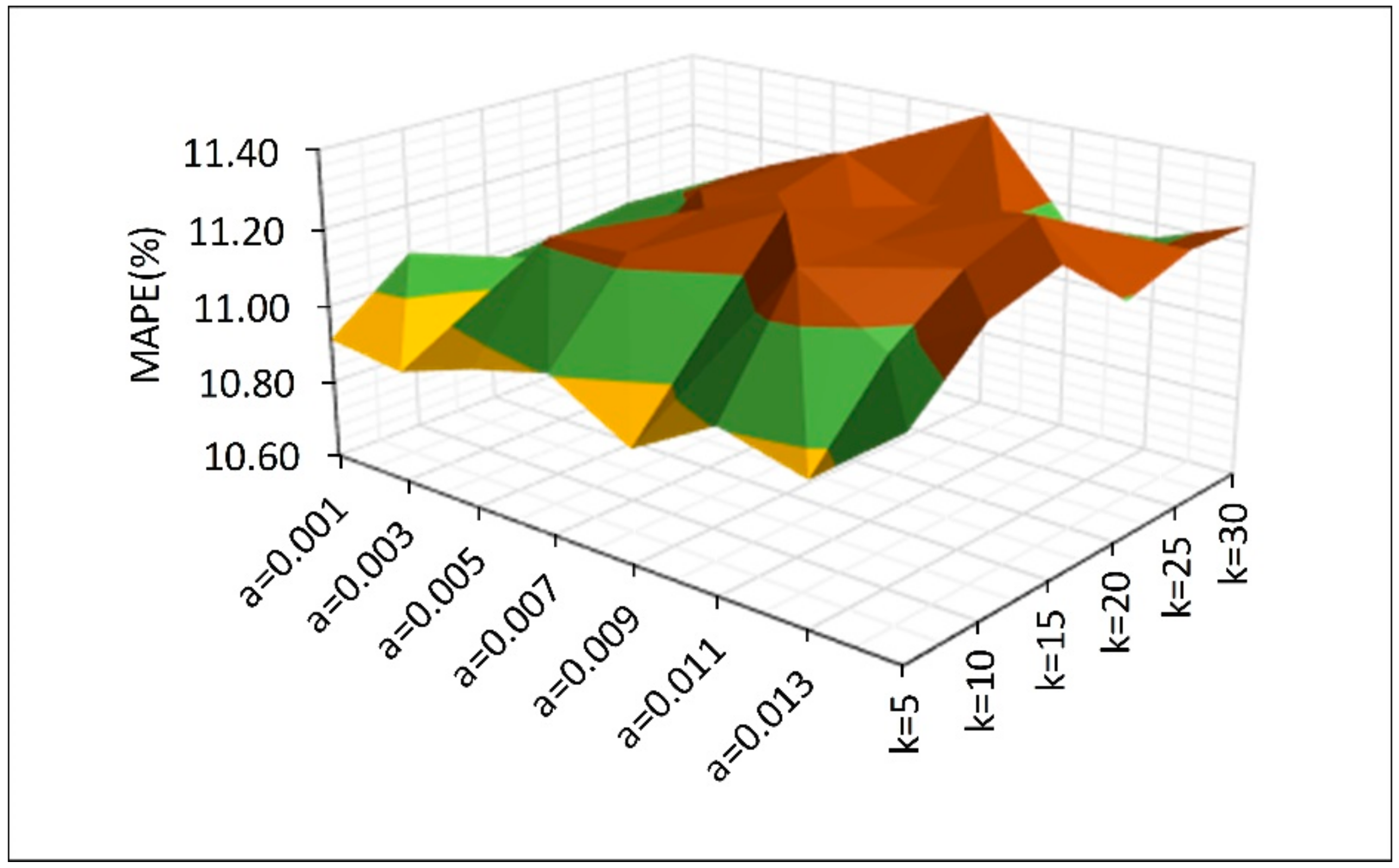
3.3.1. Calibrating the Parameters of ST-KNN Model
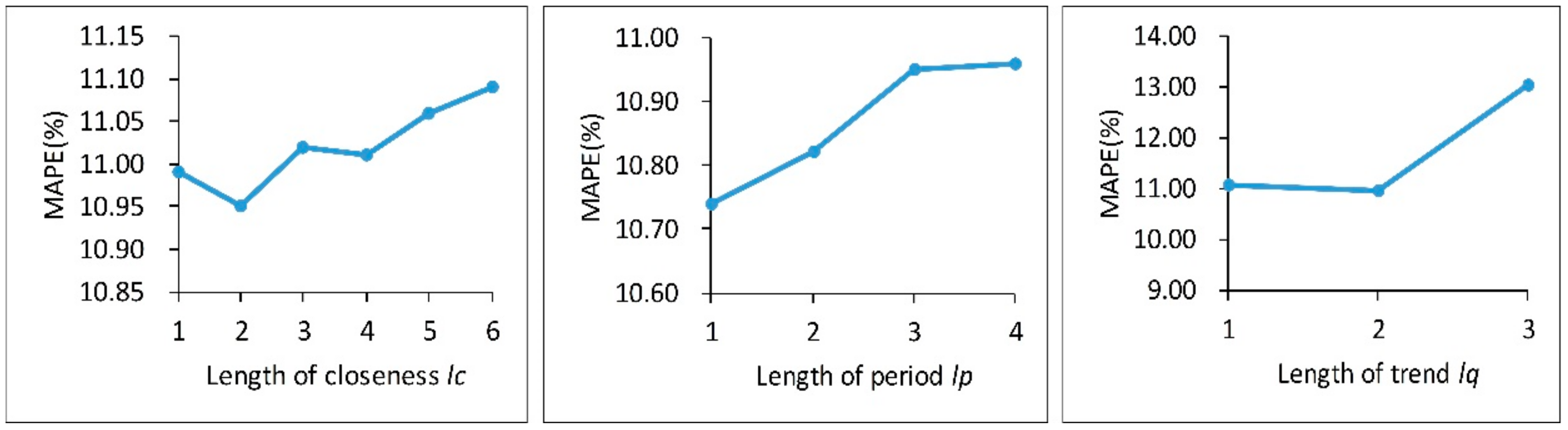
3.3.2. Calibrating the Temporally Dependent Parameters
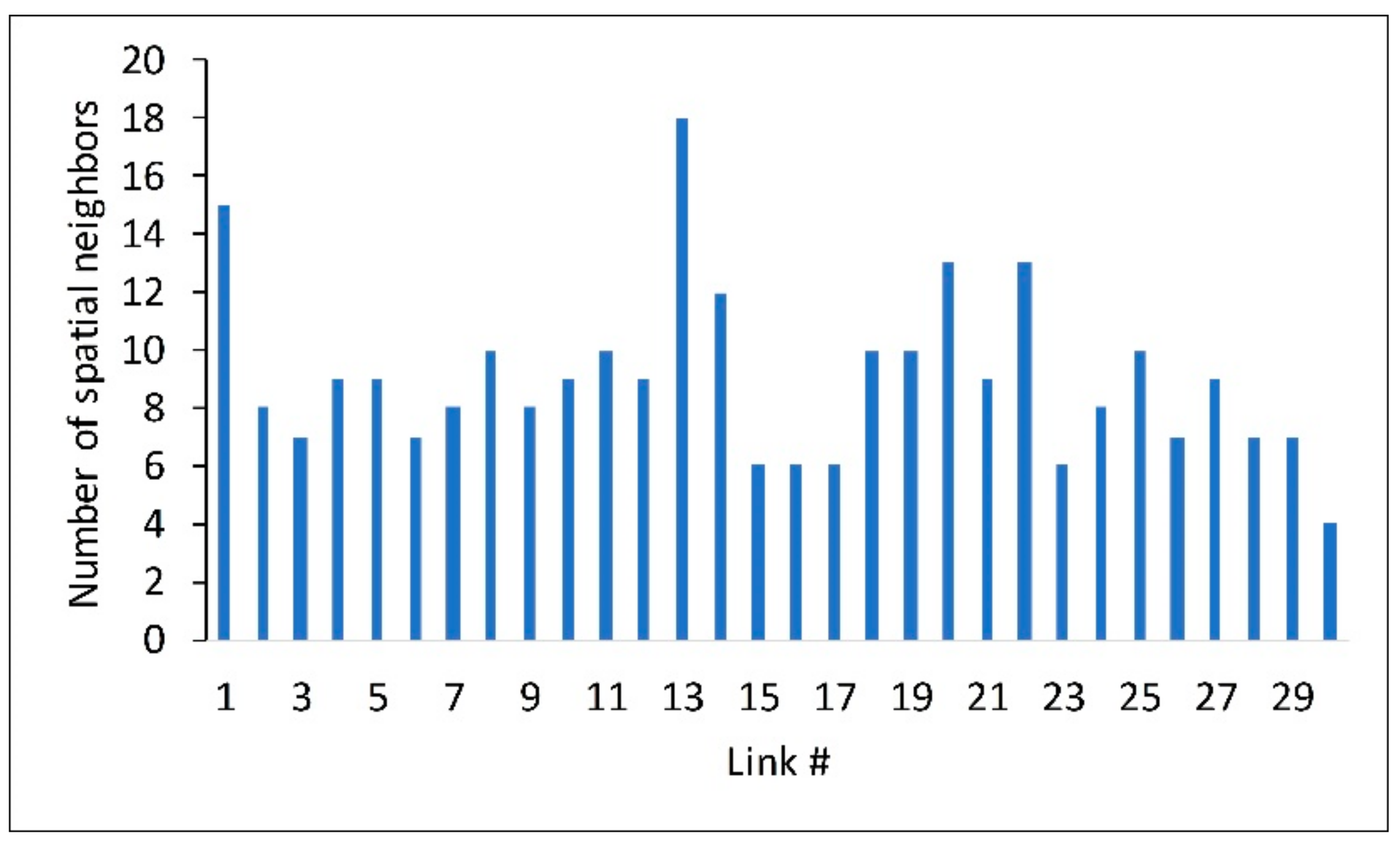
3.4. Test of Spatial Heterogeneity
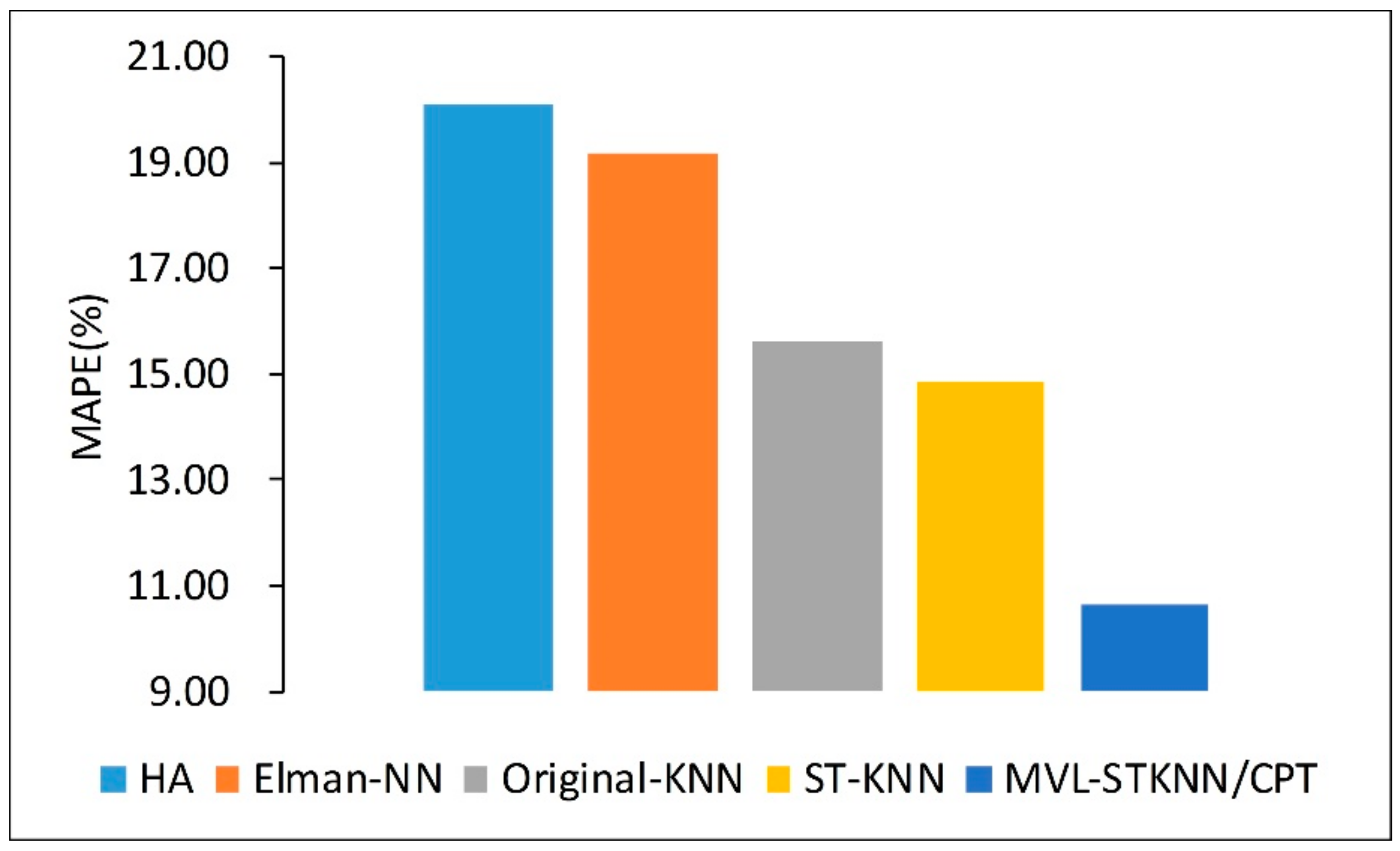
3.5. Accuracy Comparison
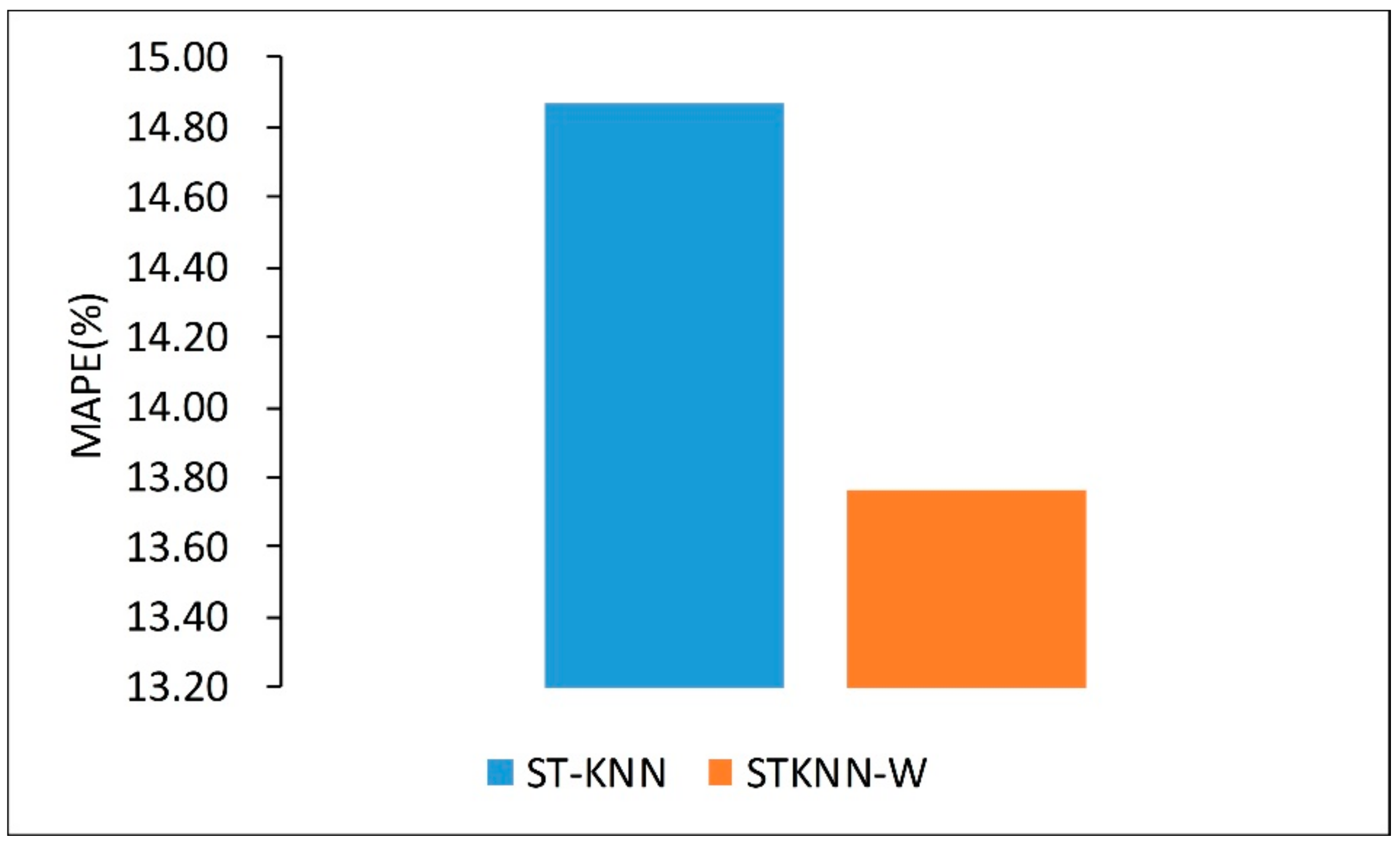
3.6. Impact of Space-Time Weighting Matrix
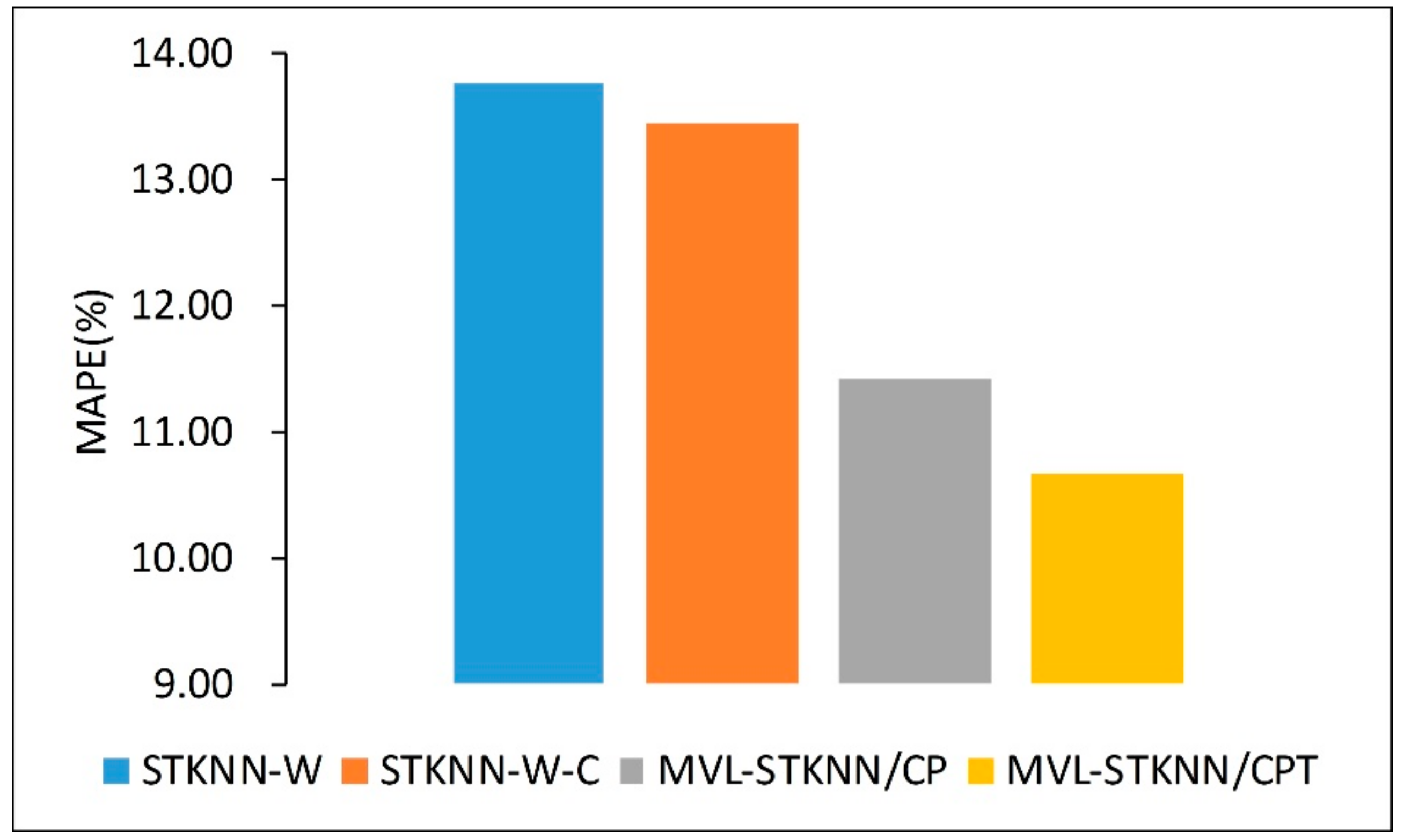
3.7. Impact of Spatial and Temporal Dependencies
4. Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Xia, J.; Chen, M.; Huang, W. A multistep corridor travel-time prediction method using presence-type vehicle detector data. J. Intell. Transp. Syst. Technol. Plan. Oper. 2011, 15, 104–113. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Golias, J.C.; Karlaftis, M.G. Short-term traffic forecasting: Overview of objectives and methods. Transp. Rev. 2004, 24, 533–557. [Google Scholar] [CrossRef]
- Van Lint, J.W.C.; Van Hinsbergen, C. Short-term traffic and travel time prediction models. Artif. Intell. Appl. to Crit. Transp. Issues 2012, 22, 22–41. [Google Scholar]
- Levin, M.; Tsao, Y.-D. On forecasting freeway occupancies and volumes. Transp. Res. Rec. 1980, 773, 47–49. [Google Scholar]
- Guo, J.; Williams, B.M. Real-Time Short-Term Traffic Speed Level Forecasting and Uncertainty Quantification Using Layered Kalman Filters. Transp. Res. Rec. J. Transp. Res. Board 2010, 2175, 28–37. [Google Scholar] [CrossRef]
- Guo, J.; Huang, W.; Williams, B.M. Adaptive Kalman filter approach for stochastic short-term traffic flow rate prediction and uncertainty quantification. Transp. Res. Part C Emerg. Technol. 2014, 43, 50–64. [Google Scholar] [CrossRef]
- Smith, B.L.; Williams, B.M.; Keith Oswald, R. Comparison of parametric and nonparametric models for traffic flow forecasting. Transp. Res. Part C 2002, 10, 303–321. [Google Scholar] [CrossRef]
- Clark, S. Traffic Prediction Using Multivariate Nonparametric Regression. J. Transp. Eng. 2003, 129, 161–168. [Google Scholar] [CrossRef]
- Zheng, Z.; Su, D. Short-term traffic volume forecasting: A k-nearest neighbor approach enhanced by constrained linearly sewing principle component algorithm. Transp. Res. Part C Emerg. Technol. 2014, 43, 143–157. [Google Scholar] [CrossRef]
- Habtemichael, F.G.; Cetin, M. Short-term traffic flow rate forecasting based on identifying similar traffic patterns. Transp. Res. Part C Emerg. Technol. 2016, 66, 61–78. [Google Scholar] [CrossRef]
- Khosravi, A.; Mazloumi, E.; Nahavandi, S.; Creighton, D.; Van Lint, J.W.C. A genetic algorithm-based method for improving quality of travel time prediction intervals. Transp. Res. Part C Emerg. Technol. 2011, 19, 1364–1376. [Google Scholar] [CrossRef]
- Park, J.; Li, D.; Murphey, Y.L.; Kristinsson, J.; McGee, R.; Kuang, M.; Phillips, T. Real time vehicle speed prediction using a Neural Network Traffic Model. In Proceedings of the International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2991–2996. [Google Scholar] [CrossRef]
- Koesdwiady, A.; Soua, R.; Karray, F. Improving Traffic Flow Prediction with Weather Information in Connected Cars: A Deep Learning Approach. IEEE Trans. Veh. Technol. 2016, 65, 9508–9517. [Google Scholar] [CrossRef]
- Ma, X.; Dai, Z.; He, Z.; Ma, J.; Wang, Y.Y.; Wang, Y.Y. Learning traffic as images: A deep convolutional neural network for large-scale transportation network speed prediction. Sensors 2017, 17, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Spatio-temporal short-term urban traffic volume forecasting using genetically optimized modular networks. Comput. Civ. Infrastruct. Eng. 2007, 22, 317–325. [Google Scholar] [CrossRef]
- Vlahogianni, E.I.; Karlaftis, M.G.; Golias, J.C. Short-term traffic forecasting: Where we are and where we’re going. Transp. Res. Part C Emerg. Technol. 2014, 43, 3–19. [Google Scholar] [CrossRef]
- Zou, Y.; Zhu, X.; Zhang, Y.; Zeng, X. A space-time diurnal method for short-term freeway travel time prediction. Transp. Res. Part C Emerg. Technol. 2014, 43, 33–49. [Google Scholar] [CrossRef]
- Asif, M.T.; Dauwels, J.; Goh, C.Y.; Oran, A.; Fathi, E.; Xu, M.; Dhanya, M.M.; Mitrovic, N.; Jaillet, P. Spatiotemporal patterns in large-scale traffic speed prediction. IEEE Trans. Intell. Transp. Syst. 2014, 15, 794–804. [Google Scholar] [CrossRef]
- Ermagun, A.; Levinson, D. Spatiotemporal Traffic Forecasting: Review and Proposed Directions. Transp. Rev. 2017, 1–29. [Google Scholar] [CrossRef]
- Kamarianakis, Y.; Prastacos, P. Spatial Time-Series Modeling: A review of the proposed methodologies. Available online: https://ideas.repec.org/p/crt/wpaper/0604.html (accessed on 14 June 2018).
- Min, X.; Hu, J.; Chen, Q.; Zhang, T.; Zhang, Y.Y. Short-term traffic flow forecasting of urban network based on dynamic STARIMA model. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, St. Louis, MO, USA, 4–7 October 2009; Volume 100084, pp. 461–466. [Google Scholar] [CrossRef]
- Min, X.; Hu, J.; Zhang, Z. Urban traffic network modeling and short-term traffic flow forecasting based on GSTARIMA model. In Proceedings of the IEEE Conference on Intelligent Transportation Systems, Funchal, Portugal, 19–22 September 2010; pp. 1535–1540. [Google Scholar] [CrossRef]
- Yu, H.; Wu, Z.; Wang, S.; Wang, Y.; Ma, X. Spatiotemporal recurrent convolutional networks for traffic prediction in transportation networks. Sensors 2017, 17, 1501. [Google Scholar] [CrossRef] [PubMed]
- Wu, S.; Yang, Z.; Zhu, X.; Yu, B. Improved k-nn for Short-Term Traffic Forecasting Using Temporal and Spatial Information. J. Transp. Eng. 2014, 140, 1–9. [Google Scholar] [CrossRef]
- Yu, B.; Song, X.; Guan, F.; Yang, Z.; Yao, B. k-Nearest Neighbor Model for Multiple-Time-Step Prediction of Short-Term Traffic Condition. J. Transp. Eng. 2016, 142, 4016018. [Google Scholar] [CrossRef]
- Xia, D.; Wang, B.; Li, H.; Li, Y.; Zhang, Z. A distributed spatial-temporal weighted model on MapReduce for short-term traffic flow forecasting. Neurocomputing 2016, 179, 246–263. [Google Scholar] [CrossRef]
- Cai, P.; Wang, Y.; Lu, G.; Chen, P.; Ding, C.; Sun, J. A spatiotemporal correlative k-nearest neighbor model for short-term traffic multistep forecasting. Transp. Res. Part C Emerg. Technol. 2016, 62, 21–34. [Google Scholar] [CrossRef]
- Hong, H.; Huang, W.; Zhou, X.; Du, S.; Bian, K.; Xie, K. Short-term traffic flow forecasting: Multi-metric KNN with related station discovery. In Proceedings of the 12th International Conference on Fuzzy Systems and Knowledge Discovery, Zhangjiajie, China, 15–17 August 2015; pp. 1670–1675. [Google Scholar]
- Yue, Y.; Yeh, A.G.O. Spatiotemporal traffic-flow dependency and short-term traffic forecasting. Environ. Plan. B Plan. Des. 2008, 35, 762–771. [Google Scholar] [CrossRef]
- Cheng, T.; Haworth, J.; Wang, J. Spatio-temporal autocorrelation of road network data. J. Geogr. Syst. 2012, 14, 389–413. [Google Scholar] [CrossRef]
- Cheng, T.; Wang, J.; Haworth, J.; Heydecker, B.; Chow, A. A Dynamic Spatial Weight Matrix and Localized Space-Time Autoregressive Integrated Moving Average for Network Modeling. Geogr. Anal. 2014, 46, 75–97. [Google Scholar] [CrossRef]
- Zhang, J.; Zheng, Y.; Qi, D.; Li, R.; Yi, X. DNN-Based Prediction Model for Spatio-Temporal Data. In Proceedings of the 24th ACM SIGSPATIAL International Conference on Advances in Geographic Information Systems, Burlingame, CA, USA, 31 October–3 November 2016; p. 92. [Google Scholar]
- Zhang, J.; Zheng, Y.; Qi, D. Deep Spatio-Temporal Residual Networks for Citywide Crowd Flows Prediction. In Proceedings of the AAAI, San Francisco, CA, USA, 4–9 February 2017; pp. 1655–1661. [Google Scholar]
- Zheng, Y.; Yi, X.; Li, M.; Li, R.; Shan, Z.; Chang, E.; Li, T. Forecasting Fine-Grained Air Quality Based on Big Data. In Proceedings of the 21th ACM SIGKDD International Conference on Knowledge Discovery and Data Mining (KDD ’15); Sydney, Australia, 10–13 August 2015; pp. 2267–2276. [Google Scholar]
- Liu, Y.; Zheng, Y.; Liang, Y.; Liu, S.; Rosenblum, D.S. Urban water quality prediction based on multi-task multi-view learning. In Proceedings of the International Joint Conference on Artificial Intelligence Google Scholar, New York, NY, USA, 9–15 July 2016. [Google Scholar]
- Yi, X.; Zheng, Y.; Zhang, J.; Li, T. ST-MVL: Filling Missing Values in Geo-Sensory Time Series Data Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences. In Proceedings of the 25th International Joint Conference on Artificial Intelligence (IJCAI 2016), New York, NY, USA, 9–15 July 2016; pp. 2704–2710. [Google Scholar]
- Ma, X.; Yu, H. Large-scale transportation network congestion evolution prediction using deep learning theory. PLoS ONE 2015, 10, e0119044. [Google Scholar] [CrossRef] [PubMed]
- Box, G.E.P.; Jenkins, G.M.; Reinsel, G.C. Time Series Analysis: Forecasting and Control; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 1118619064. [Google Scholar]
- Huang, W.; Song, G.; Hong, H.; Xie, K. Deep Architecture for Traffic Flow Prediction: Deep Belief Networks With Multitask Learning. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2191–2201. [Google Scholar] [CrossRef]
- Duan, Y.; Lv, Y.; Kang, W.; Zhao, Y. A deep learning based approach for traffic data imputation. In Proceedings of the 17th International IEEE Conference on Intelligent Transportation Systems (ITSC), Qingdao, China, 8–11 October 2014; pp. 912–917. [Google Scholar]
- Fouladgar, M.; Parchami, M.; Elmasri, R.; Ghaderi, A. Scalable Deep Traffic Flow Neural Networks for Urban Traffic Congestion Prediction. In Proceedings of the International Joint Conference on Neural Networks (IJCNN), Anchorage, AK, USA, 14–19 May 2017. [Google Scholar] [CrossRef]
- Cheng, S.; Lu, F. A Two-Step Method for Missing Spatio-Temporal Data Reconstruction. ISPRS Int. J. Geo-Inf. 2017, 6, 187. [Google Scholar] [CrossRef]
- Dang, X.-C.; Hao, Z.-J. Prediction for network traffic based on modified Elman neural network. J. Comput. Appl. 2010, 30, 2648–2652. [Google Scholar] [CrossRef]
- Li, S.; Shen, Z.; Xiong, G. A k-nearest neighbor locally weighted regression method for short-term traffic flow forecasting. In Proceedings of the 15th International IEEE Conference on Intelligent Transportation Systems, Anchorage, AK, USA, 16–19 September 2012; pp. 1596–1601. [Google Scholar]
- Xiaoyu, H.; Yisheng, W.; Siyu, H.; Hou, X.; Wang, Y.; Hu, S. Short-term Traffic Flow Forecasting based on Two-tier K-nearest Neighbor Algorithm. Procedia Soc. Behav. Sci. 2013, 96, 2529–2536. [Google Scholar] [CrossRef]
- Gao, P.; Liu, Z.; Tian, K.; Liu, G. Characterizing Traffic Conditions from the Perspective of Spatial-Temporal Heterogeneity. ISPRS Int. J. Geo-Inf. 2016, 5, 34. [Google Scholar] [CrossRef]
- Liu, K.; Gao, S.; Qiu, P.; Liu, X.; Yan, B.; Lu, F. Road2Vec: Measuring Traffic Interactions in Urban Road System from Massive Travel Routes. ISPRS Int. J. Geo-Inf. 2017, 6, 321. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Dataset | PeMS | Beijing |
|---|---|---|
| Time span | 15 August 2016–14 October 2016 | 1 March 2012–30 April 2012 |
| Time interval | 5 min | 5 min |
| Number of link | 59 | 30 |
| Parameters | Values |
|---|---|
| 0.009 | |
| 5 | |
| 2 | |
| 1 | |
| 2 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, S.; Lu, F.; Peng, P.; Wu, S. A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting. ISPRS Int. J. Geo-Inf. 2018, 7, 218. https://doi.org/10.3390/ijgi7060218
Cheng S, Lu F, Peng P, Wu S. A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting. ISPRS International Journal of Geo-Information. 2018; 7(6):218. https://doi.org/10.3390/ijgi7060218
Chicago/Turabian StyleCheng, Shifen, Feng Lu, Peng Peng, and Sheng Wu. 2018. "A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting" ISPRS International Journal of Geo-Information 7, no. 6: 218. https://doi.org/10.3390/ijgi7060218
APA StyleCheng, S., Lu, F., Peng, P., & Wu, S. (2018). A Spatiotemporal Multi-View-Based Learning Method for Short-Term Traffic Forecasting. ISPRS International Journal of Geo-Information, 7(6), 218. https://doi.org/10.3390/ijgi7060218