Abstract
The Precise Point Positioning (PPP) with fast integer ambiguity resolution (PPP-RTK) is feasible only if the solution is augmented with precise ionospheric parameters. The vertical ionospheric delays together with the receiver hardware biases, are estimated simultaneously based on the uncombined PPP model. The performance of the ionospheric delays was evaluated and applied in the PPP-RTK demonstration during the low solar activity period. The processing was supported by precise products provided by Deutsches GeoForschungsZentrum Potsdam (GFZ) and also by real-time products provided by the National Centre for Space Studies (CNES). Since GFZ provides only precise orbits and clocks, other products needed for ambiguity resolution, such as phase biases, were estimated at the Geodetic Observatory Pecny (GOP). When ambiguity parameters were resolved as integer values in the GPS-only solution, the initial convergence period was reduced from 30 and 20 min to 24 and 13 min when using CNES and GFZ/GOP products, respectively. The accuracy of ionospheric delays derived from the ambiguity fixed PPP, and the CODE global ionosphere map were then assessed. Comparison of ambiguity fixed ionospheric delay obtained at two collocated stations indicated the accuracy of 0.15 TECU for different scenarios with more than 60% improvement compared to the ambiguity float PPP. However, a daily periodic variation can be observed from the multi-day short-baseline ionospheric residuals. The accuracy of the interpolated ionospheric delay from global maps revealed a dependency on the location of the stations, ranging from 1 to 3 TECU. Precise ionospheric delays derived from the EUREF permanent network with an inter-station distance larger than 73 km were selected for ionospheric modeling at the user location. Results indicated that the PPP ambiguity resolution could be achieved within three minutes. After enlarging the inter-station distance to 209 km, ambiguity resolution could also be achieved within several minutes.
1. Introduction
Based on real-time orbits and clock corrections estimated from global GNSS reference networks, Precise Point Positioning (PPP) [1] can achieve a decimeter- to centimeter-level accuracy in a kinematic mode. However, a long convergence time of about 30 min [2] limits its widespread usage, such as in modern agriculture, mobile mapping, and drone navigation. Precise Point Positioning ambiguity resolution (PPP-AR) utilizing satellite phase biases corrections [3] can shorten the convergence time and improve the accuracy significantly. However, a convergence time of about 15 min is still needed. Fast and reliable ambiguity resolution can be achieved when augmenting the PPP with precise ionospheric and tropospheric corrections estimated on the basis of processing GNSS data from a local permanent network (PPP-RTK) [4].
De Oliveira et al. [5] presented how tropospheric modeling within dense and sparse networks can improve the GPS-only and GPS + GLONASS ambiguity float PPP solution in terms of reducing a convergence time. Results indicated that the convergence time of receiver coordinates could be shortened by 2% to 20%. Psychas et al. [6] assessed the precision of ionospheric corrections in terms of reliability of fast ambiguity resolution when applying PPP-RTK. Results indicated that a faster PPP-RTK solution is expected as long as the precision of ionospheric corrections at a user side is better than 5 cm (~0.31 TECU).
The atmospheric corrections are interpolated to the user location and predicted to obtain the best accuracy. Teunissen et al. [7] demonstrated the performance of PPP-RTK based on a small-scale network with inter-station distances of around 27 and 60 km and indicated that centimeter-level positioning accuracy could be achieved. Such accuracy is comparable to the traditional network RTK solution. Li et al. [8] used linear interpolation for atmospheric corrections’ prediction and showed that instantaneous ambiguity resolution is feasible in a regional network of 60 km spatial resolution. Zhang et al. [9] further demonstrated PPP-RTK using precise corrections based on reference stations with mutual distances ranging from 60 to 100 km. Li et al. [10] demonstrated the performance of PPP-RTK exploiting BDS/GPS observations from European stations during a calm ionospheric disturbance period. Results indicated that centimeter-level positioning accuracy of the GPS-only, as well as BDS-only solution, could be obtained. Psychas et al. [11] analyzed the real-time PPP-RTK when using ionospheric corrections from multi-scale regional networks during a day with medium ionospheric disturbance. Results showed that the sub-decimeter horizontal accuracy could be achieved within 1 min and 2 min based on corrections from a network with 68 km and 115 km spacing.
PPP-RTK technology preserves the benefits of PPP for global positioning and RTK for fast convergence. In addition, only one-way communication is needed, which offers a high potential for its application using low-cost smart terminals. BDS and Galileo have announced their future global services for providing additional corrections enabling PPP-AR in real-time [12,13]. Therefore, investigating the accuracy of ionospheric delay from multi-scale reference networks and analyzing the augmentation to fast PPP ambiguity resolution is necessary.
In this study, an uncombined PPP model is used to derive the unbiased ionospheric delay which is not affected by receiver and satellite hardware biases. The accuracy of the ionospheric delays derived from ambiguity-fixed PPP as well as the CODE global ionospheric products [14] are analyzed. Then, the performance of GPS-only and Galileo-only PPP-RTK are assessed in terms of the convergence time, and different solutions using different ionospheric corrections based on the data from the EUREF network [15] are compared. Finally, conclusions are drawn.
2. Methods
The equations for dual-frequency code and carrier phase uncombined observations for satellite and receiver on frequency can be written as:
where the subscript f = (1, 2) refers to a specific carrier frequency, the subscript r to a receiver, and the superscript s to a specific satellite; indicates the geometric distance between the satellite and receiver; and are the clock errors of receiver and satellite; is the slant tropospheric delay; is the slant ionospheric delay on the first frequency which can be mapped to the vertical ionospheric delay with the mapping function, and is the frequency-dependent factor; and are the receiver and satellite specific code hardware delays; and are the wavelength in meters and integer ambiguity in cycles; and are the receiver-dependent and satellite-dependent uncalibrated phase delays; and are the pseudo-range and carrier phase measurement noise, respectively. Note that the higher-order ionospheric effects are neglected, as they have limited influence on the performance of ambiguity resolution.
The GNSS observations are affected by the satellite and receiver code hardware delays, which can be canceled or absorbed by other parameters in the uncombined PPP model. The satellite clock parameter is eliminated by applying a precise clock corrections product, which also contains the satellite-related code hardware delays according to the standards defined by the International GNSS Service (IGS). The re-parameterized equations can be written as [16]:
The estimable parameters include:
where and are the coefficients for the hardware delay combination, and are the receiver and satellite differential code biases (DCB) between the first and second frequencies which are absorbed by the ionospheric delay.
The receiver DCB is generally treated as a time-constant parameter. Therefore, the interpolated ionospheric delay from regional networks is biased by the averaged receiver hardware delay from the network side. The mean biases can be absorbed by the receiver clock parameter, thus not affecting the user position. However, time-variant characteristics can be observed due to the receiver hardware temperature variations [17,18], and it affects the accuracy of interpolated ionospheric delay. One alternative option is to introduce the receiver DCB as an estimable parameter in the PPP observation model. The equation can be written as:
where is the re-parameterized receiver clock which absorbs the combination of receiver hardware delays defined in Equation (3). The receiver code hardware delays are also absorbed by the carrier phase initial ambiguities, which can be eliminated by forming the between satellites’ single differenced observations. The satellite DCB can be corrected by the multi-GNSS DCB products, whereas the receiver DCB between the first and second frequency, is estimated. Consequently, the estimated ionospheric delay parameter is not biased by the DCBs. During the implementation, the satellite code biases and phase biases are converted to the un-differenced model and applied using the uncombined observation model. Then, Equation (4) can be used for deriving the precise ionospheric delays from the network side and used for the PPP-RTK at a user side.
If the external tropospheric and ionospheric corrections are available, they are introduced in the PPP-RTK solution as virtual observations to augment the PPP:
where represents the predicted slant or vertical ionospheric delay for satellite at the first frequency and represents the predicted slant or vertical tropospheric delay. and are the random errors for the predicted ionospheric and tropospheric delays, respectively. The variance of the atmosphere corrections is empirically determined by comparing the predicted ionospheric delay and the ambiguity fixed ionospheric delay at a user location.
The dual-frequency observations from the GPS and Galileo constellations are processed separately in the raw PPP model for ambiguity resolution demonstration in the afterward analysis. However, the model can be extended for the multi-constellation and multi-frequency GNSS observations. Inter-system biases should be estimated for the multi-GNSS PPP. For the multi-frequency combinations, inter-frequency clock biases should be applied for the satellite clock corrections, and additional parameters should be estimated to absorb the receiver hardware delays [19].
3. Data and Models
Apart from the precise satellite orbits and clocks, satellite phase biases are necessary for the Precise Point Positioning ambiguity resolution. While the IGS provides only precise orbits and clocks via its real-time service (RTS), the National Centre for Space Studies (CNES) also provides satellites’ phase biases for multi-GNSS [20] along with the orbits and clocks. Therefore, we used the CNES products for the first demonstration of the real-time PPP ambiguity resolution performance. In addition, the final orbits and clocks products from Deutsches GeoForschungsZentrum Potsdam (GFZ) [21], complete with the phase biases estimated at the Geodetic Observatory Pecny (GOP) [22], were used in the second study for demonstrating the performance of the PPP-AR. Note that the two solutions differ mainly in the accuracy of the satellite products and not in the user solution.
For estimating phase biases at GOP, data from the MGEX permanent stations were processed using the G-Nut software [23] on a daily basis with a sampling interval of 30 s. The forward Kalman filter was applied with an initial period for phase biases to converge. Strategies used for the processing at both service and user sides are listed in Table 1. The vertical or the slant ionospheric delay parameter can be resolved in the PPP model, which is interchangeable when applying the mapping function. “Iono-No” indicates that no external ionospheric corrections were used in PPP; that is, the vertical ionospheric delay parameter for each satellite and receiver were estimated at each epoch. “Iono-Interp” indicates PPP using the external interpolated ionospheric corrections.

Table 1.
Processing strategies at the service and user side for PPP/-AR/-RTK.
4. Results
We analyzed the quality of the achieved products from a network solution in terms of the stability of the estimated phase biases, performance of ambiguity fixing when estimating ionospheric delays and using different precise products, and the internal accuracy of ionospheric delay from the ambiguity-fixed PPP. Then, the estimated ionospheric delays were interpolated to the user location with multi-scale sparse networks and introduced in the PPP algorithm.
4.1. Convergence Analysis of Ambiguity-Float and Ambiguity-Fixed PPP
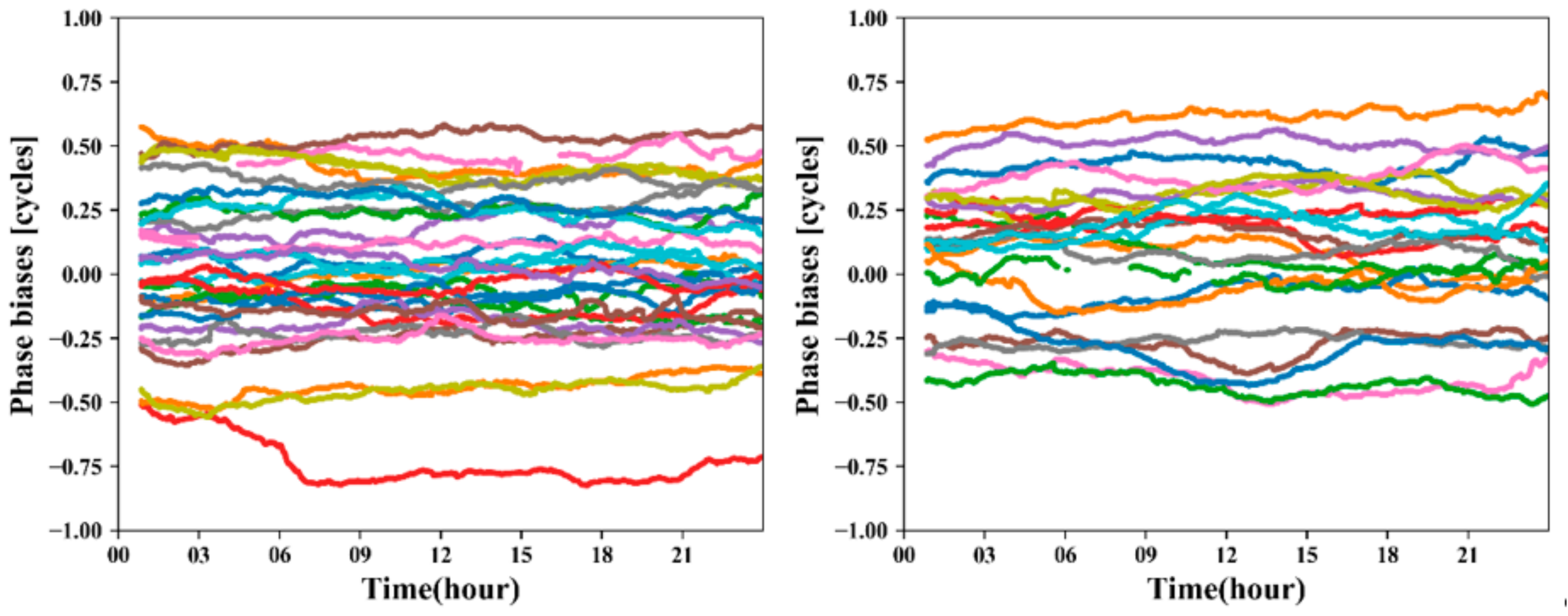
The observations from day 001 of the year 2019 (DOY) during a solar-minimum period were selected to illustrate the quality of the network-based phase biases. The phase biases were estimated following the method proposed by [3]. However, they were converted to the uncombined value during the implementation for the raw PPP ambiguity resolution [25]. Figure 1 shows the un-differenced narrow-lane satellite phase biases for all GPS and Galileo satellites estimated at GOP. It can be observed that the estimated phase biases for most satellites showed good stability over time. The data gap at the first 50 min was caused due to the convergence of the phase biases. The average standard deviation was 0.04 cycles and 0.05 cycles for GPS and Galileo, respectively.
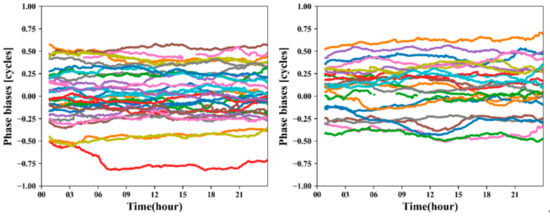
Figure 1.
Un-differenced satellite narrow-lane phase biases for all GPS (left) and Galileo (right) satellites. Each color represents a different satellite.
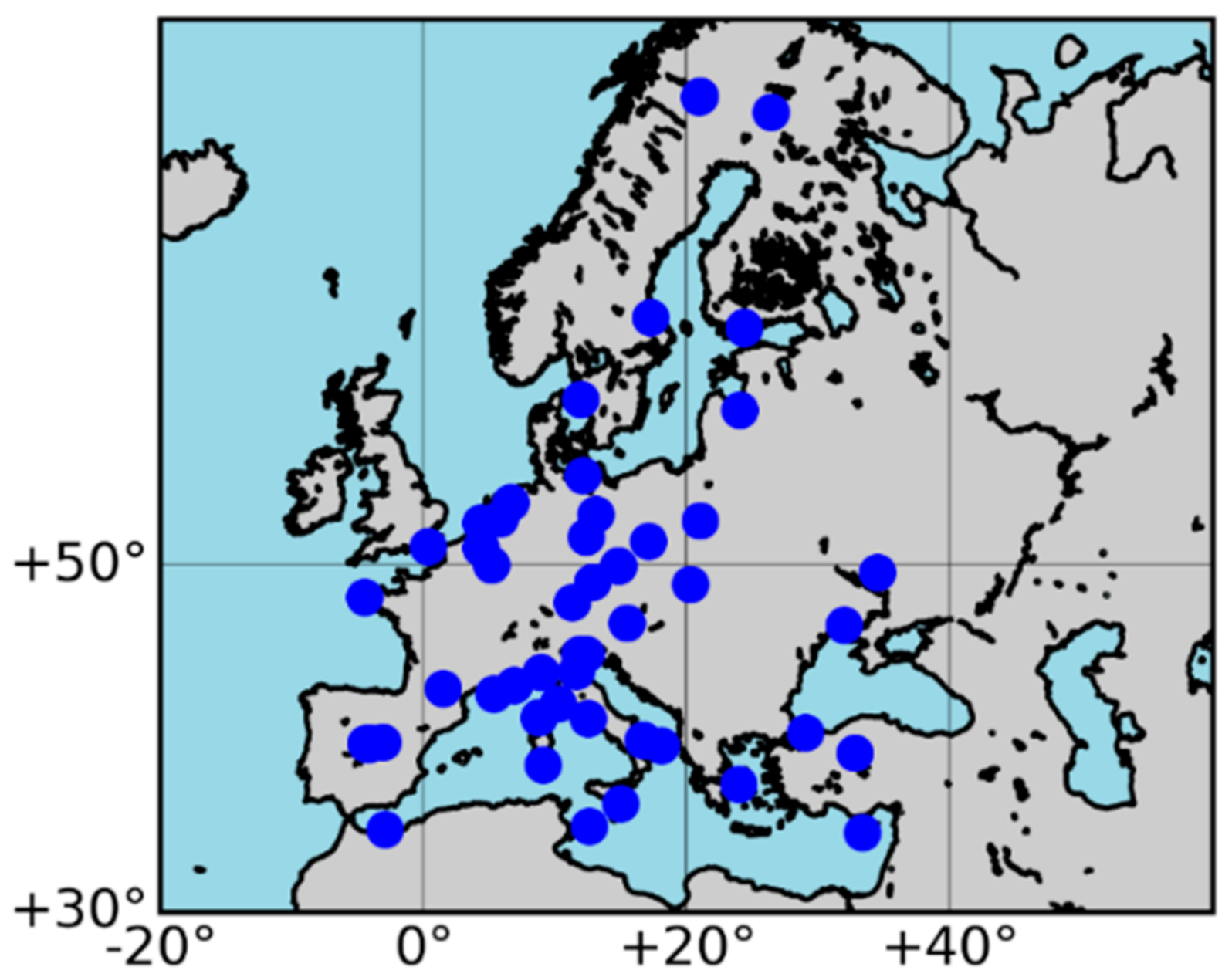
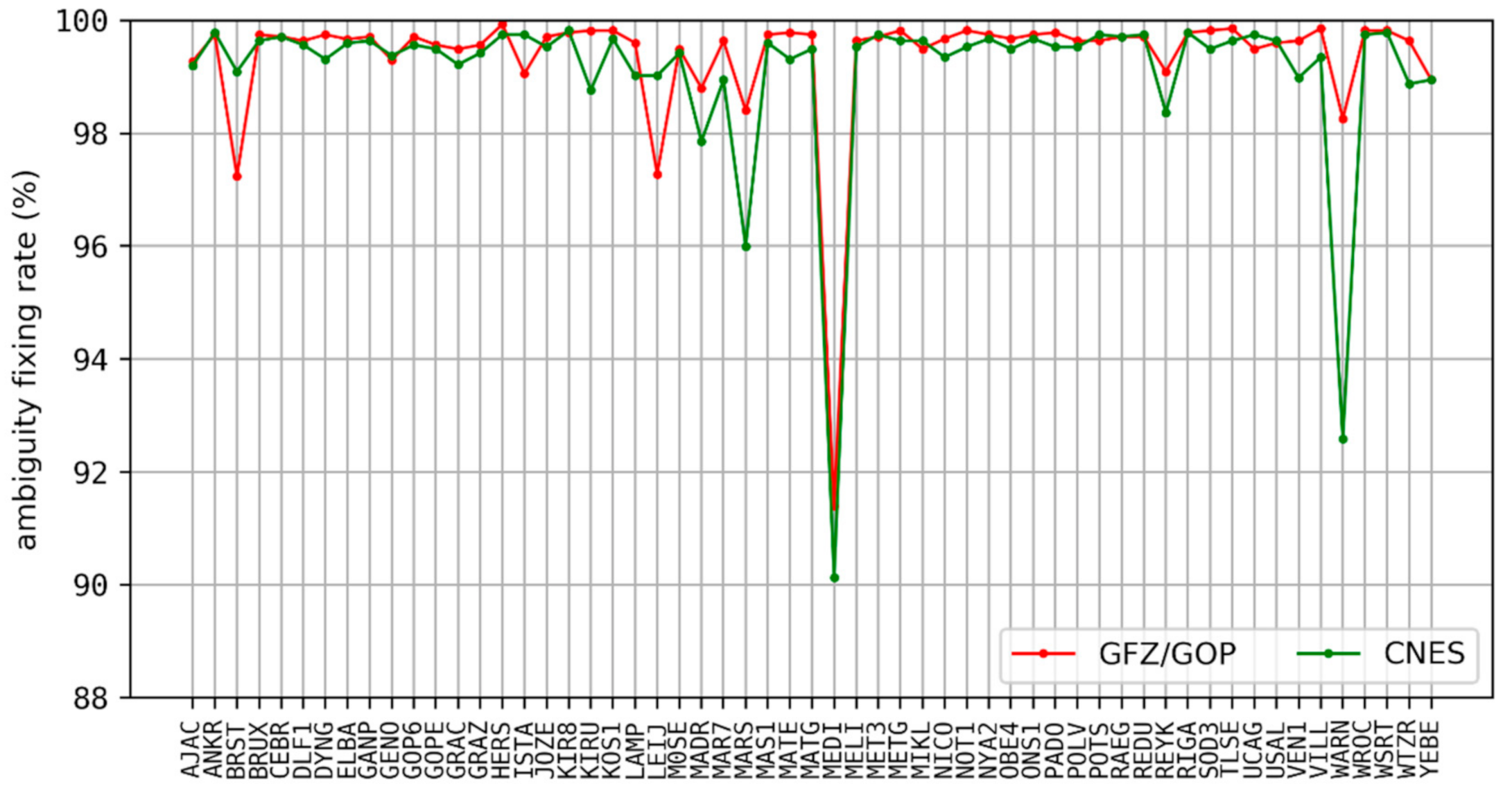
Figure 2 shows 56 EUREF permanent stations selected for the PPP analysis with the ambiguity fixing rate shown in Figure 3. The fixing rate for most of the stations was larger than 99%, and comparable performance can be achieved for two different products, GFZ/GOP and CNES. However, the fixing rate for the station MEDI was relatively low, which was affected by the observation quality and should be excluded from the ionospheric modeling at the network side. Overall, the results indicated that one can achieve a reliable real-time PPP ambiguity resolution when using the CNES real-time corrections. Therefore, the CNES products were used for further ionospheric delay modeling and PPP-RTK experiments.

Figure 2.
Stations used for assessing PPP convergence and ionospheric accuracy.
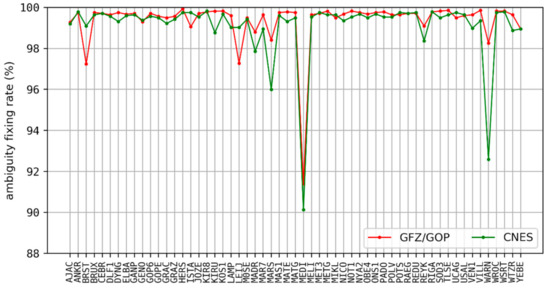
Figure 3.
Comparison of the ambiguity fixing rate of the static PPP using GFZ/GOP and CNES products at different stations.
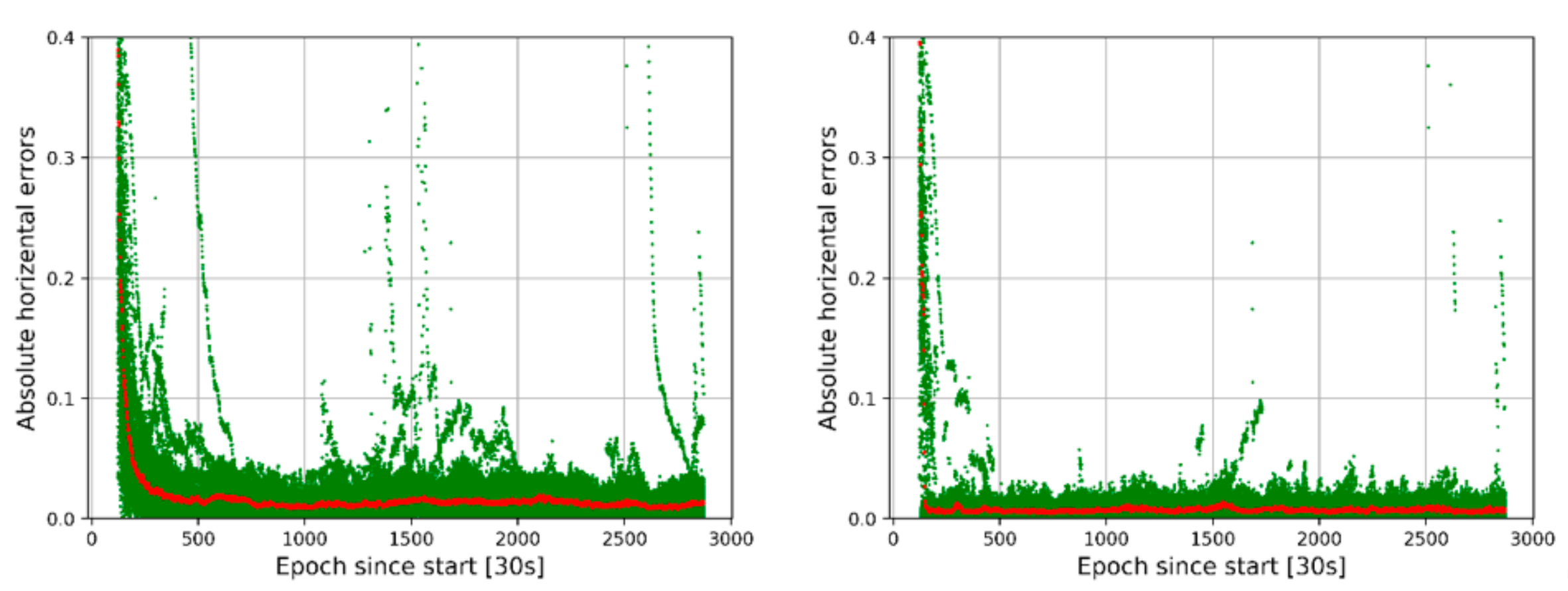
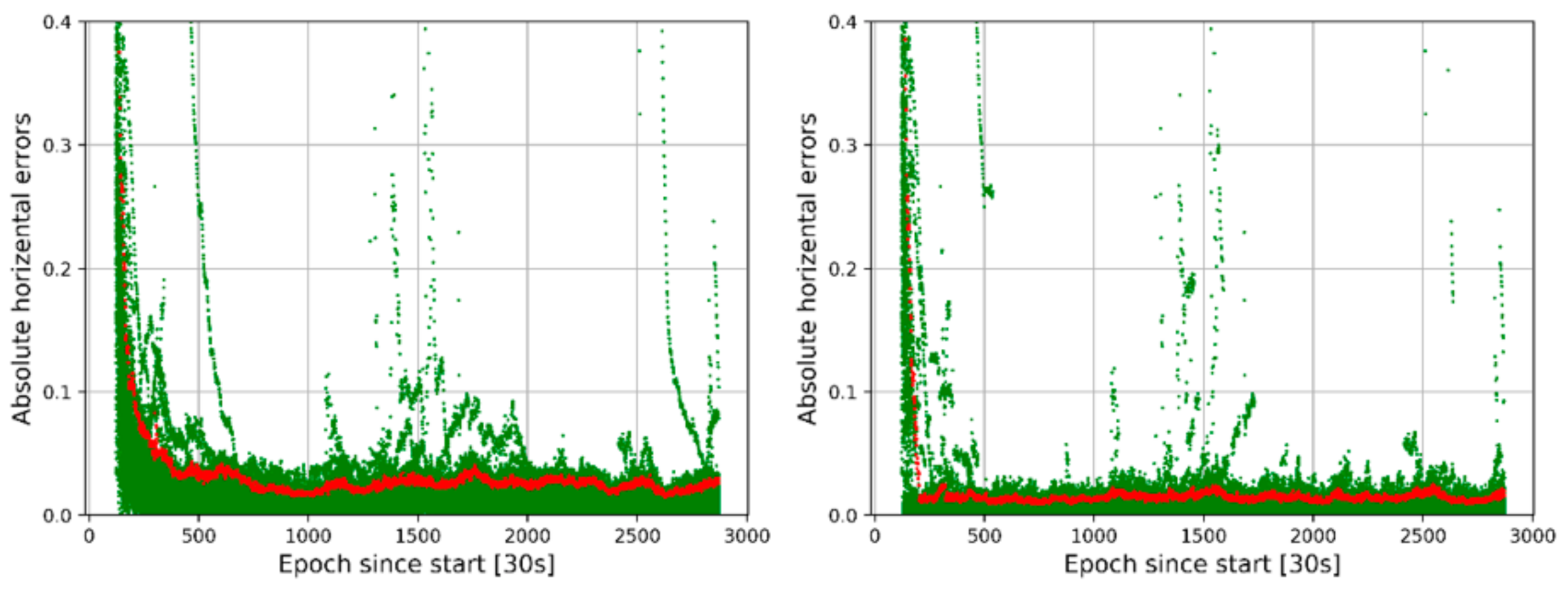
To analyze the convergence of PPP when using different products, all stations were processed in the ambiguity-float and ambiguity-fixed solution without external ionospheric corrections or constraints. The coordinates from the EUREF weekly solution were selected as the reference, and the positioning errors for all stations at each epoch were computed and sorted. The positioning errors at the 50% percentile were selected to indicate the convergence of the PPP. The convergence time differed significantly when data from different stations were used along with different precise products (Figure 4 and Figure 5). Overall, the solutions from the GFZ/GOP products showed better performance than the solution utilizing CNES real-time products. This can be attributed to more precise final orbits and clocks products together with phase biases estimated using the same software package. The average PPP convergence time for the CNES and GFZ/GOP ambiguity-float solutions for achieving the accuracy of a decimeter was 30 min and 20 min, respectively. The integer ambiguity resolution improved the convergence by 20% and 35%, i.e., reaching 24 min and 13 min, respectively. The ambiguity fixing improved not only the accuracy but also the reliability and stability of the positioning.

Figure 4.
Horizontal positioning errors achieved from PPP ambiguity-float (left) and ambiguity-fixed (right) solution using GFZ/GOP products: all errors (green) and errors at the 50% percentile (red).
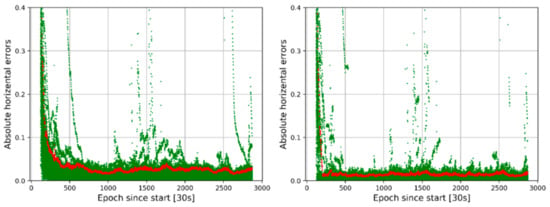
Figure 5.
Horizontal positioning errors achieved from PPP ambiguity-float (left) and ambiguity-fixed (right) solution using CNES products: all errors (green), and errors at the 50% percentile (red).
4.2. Ionospheric Delays Retrival from the Ambiguity-Fixed PPP
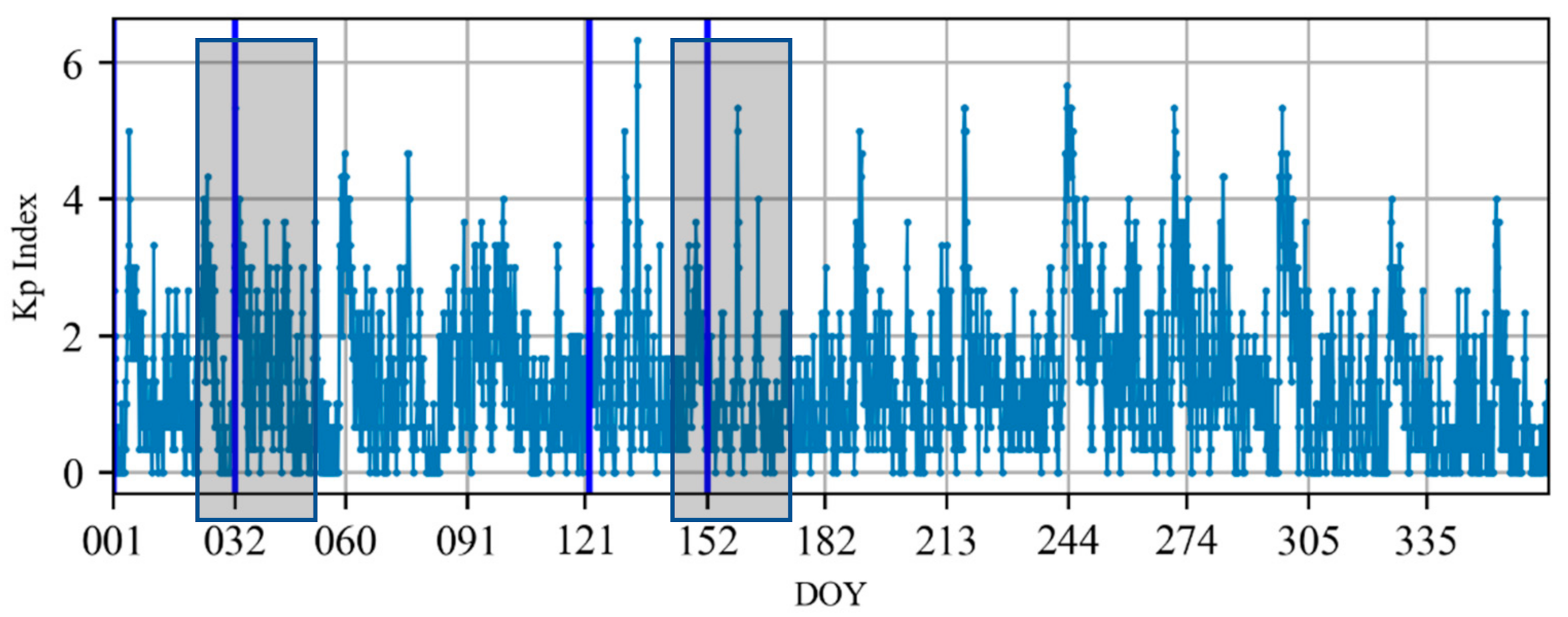
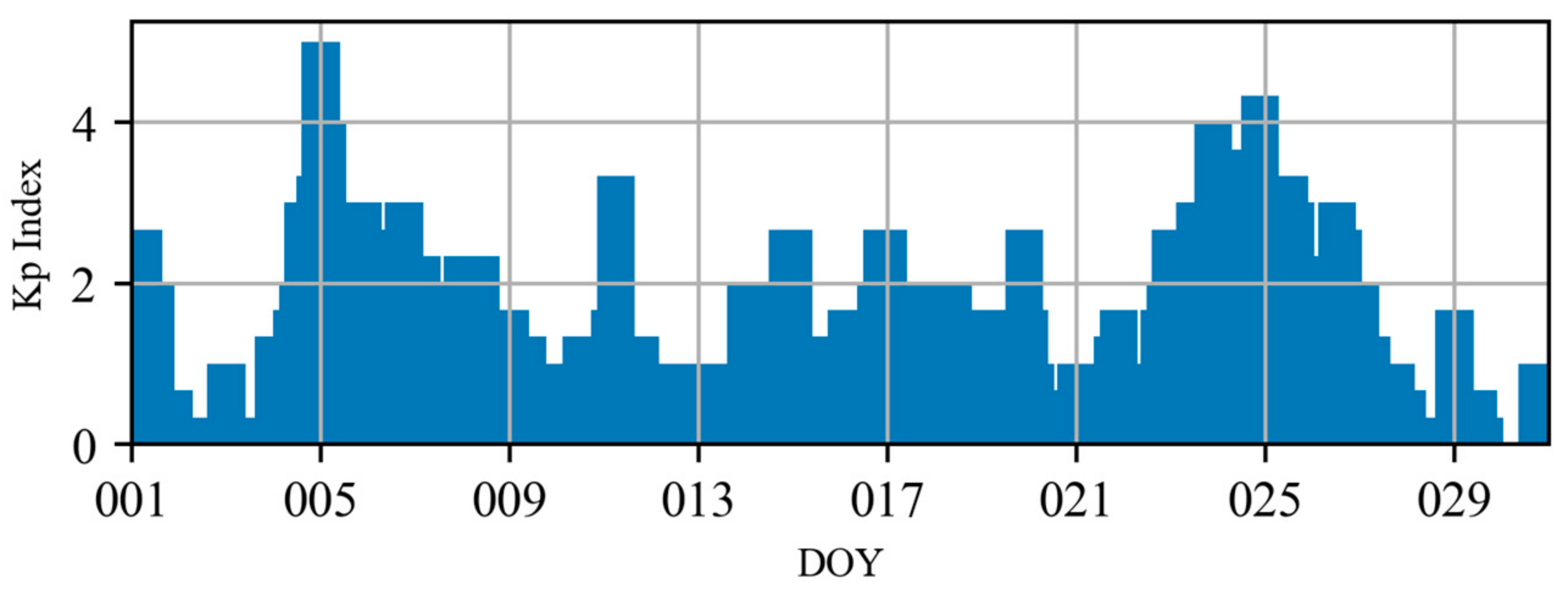
The range of the ionospheric error is related to the observation latitude, local time, season, geomagnetic activity, solar cycle, and other anomalies and irregularities [26]. The Kp-index is a scale used to characterize the magnitude of geomagnetic disturbances and can be used to monitor the global activity of ionospheric. The Kp index during the period of 2019 is shown in Figure 6, which was generally smaller than three for a quiet geomagnetic condition [27]. Two sessions with different ionospheric activities (DOY 001 to 031 and DOY 121 to 150) in 2019, which covered the weak and strong ionospheric period, were selected for the analysis.

Figure 6.
The indices of Kp during the period of 2019. The selected period for the analysis are represented as the gray area between two vertical dashed lines.
For assessing the estimated ionospheric delays from the PPP-AR solution, three short baselines were formed. The receiver and antenna types are shown in Table 2. In theory, the between the station single difference in the receiver-satellite slant ionospheric delay from a short baseline should be close to zero if the hardware delays are eliminated. Therefore, a fluctuation of the single differenced ionospheric delay around zero can be used to measure systematic errors and random noise of the estimated ionospheric delays.
Table 2.
Description of sites used for the short-baselines.
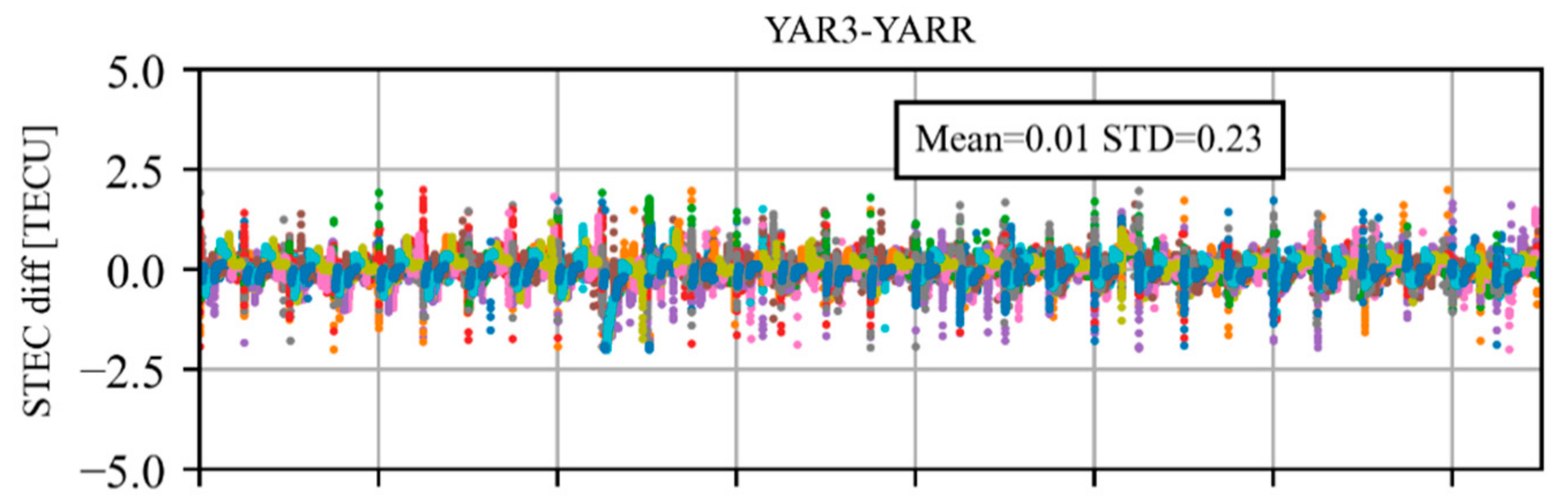
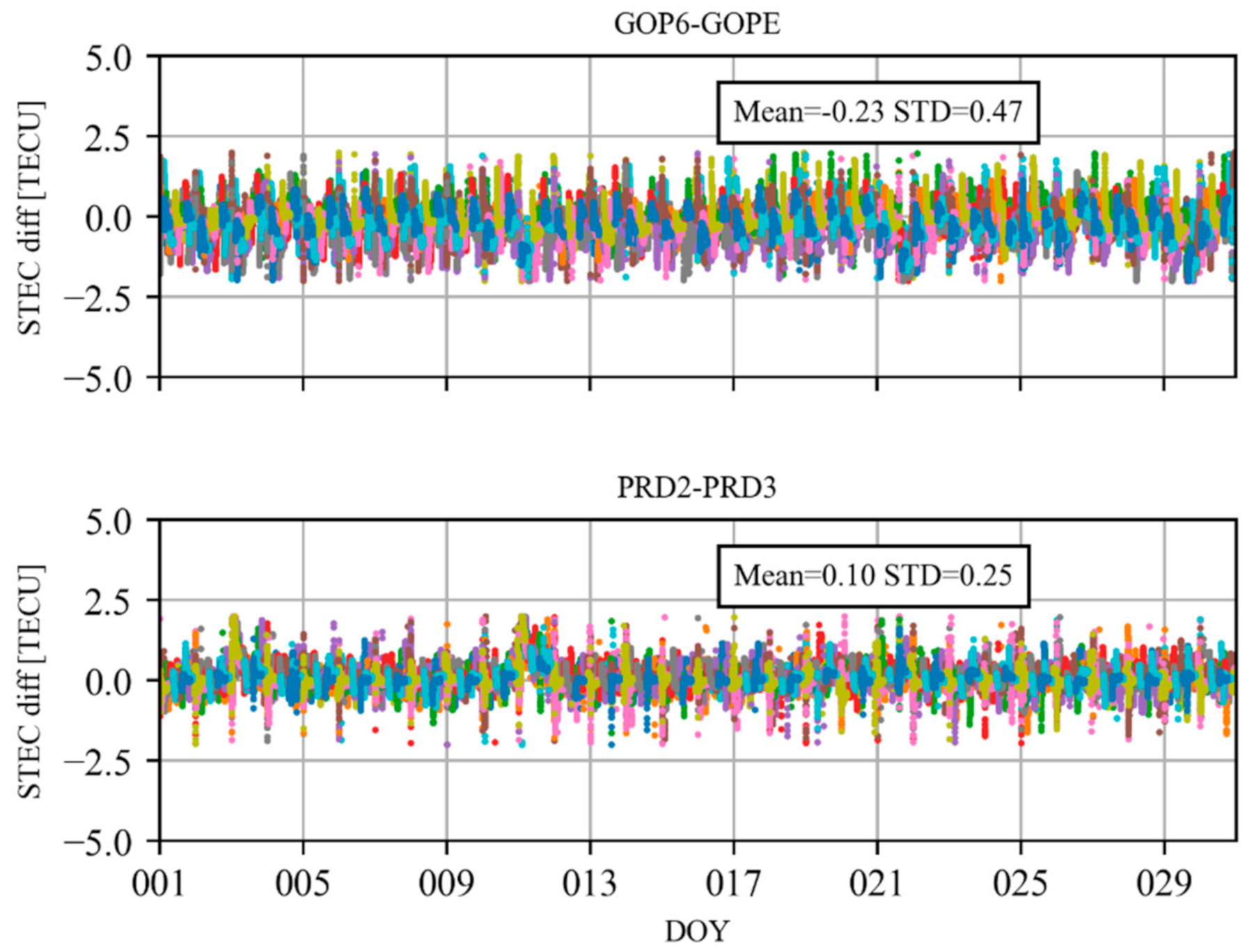
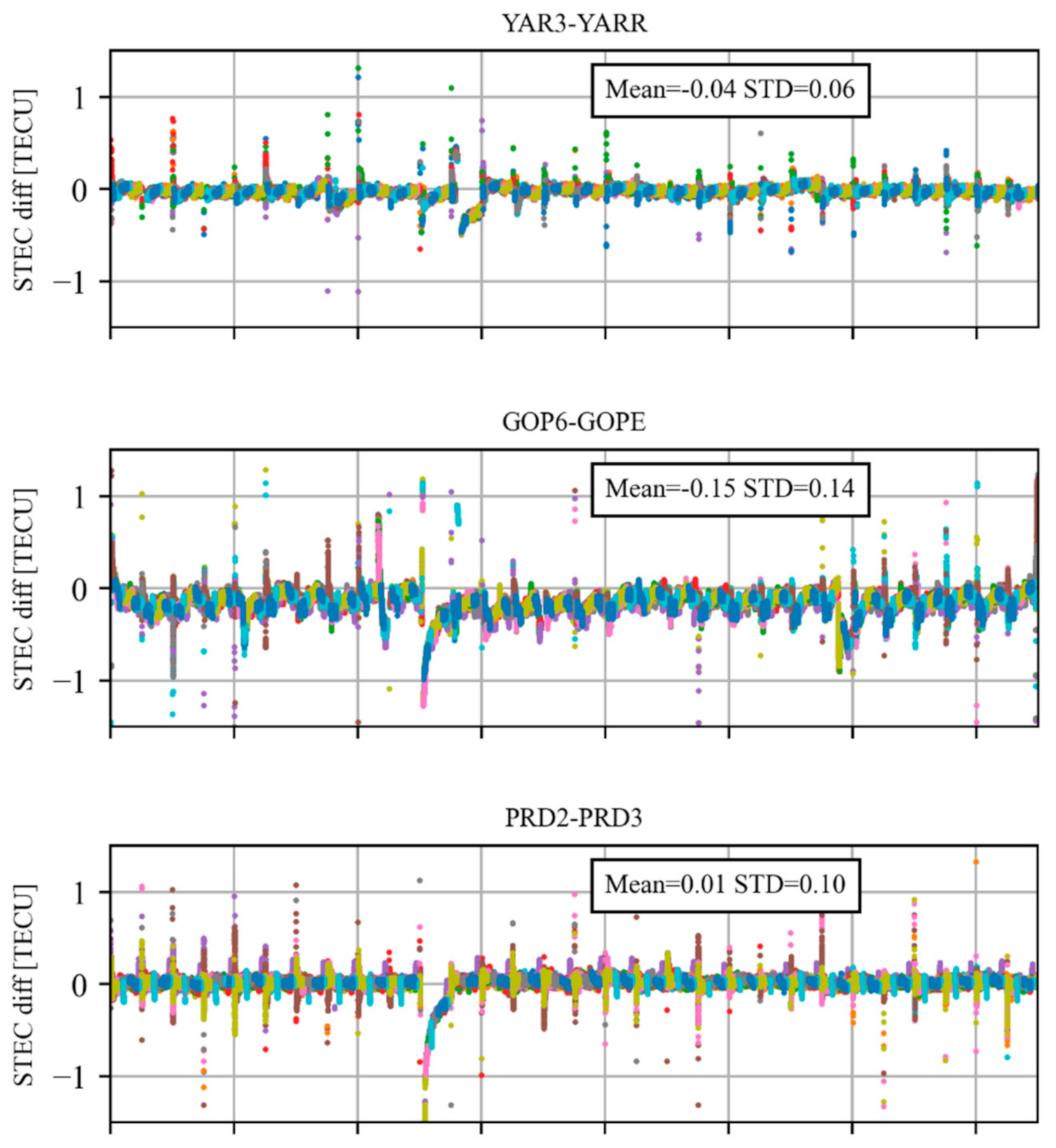
Figure 7 shows the differenced slant ionospheric delays derived from the ambiguity-float PPP for three station pairs during DO 001 to 030 in 2019. It is clearly visible that ionospheric error time series from the ambiguity float PPP showed a remarkable variation for different stations. A maximum mean bias and standard deviation (STD) were reached for station pair GOP6-GOPE, which is mainly caused by two different receiver types used at the two stations. In comparison, a minimum bias and STD were observed for the station pairs YAR3-YARR and PRD2-PRD3, which use the same receiver types. After applying the ambiguity fixing procedure, the corresponding ionospheric residuals are shown in Figure 8. The STD were reduced by more than 60% for the three station pairs. Note that the ionospheric delays were estimated on the daily basis, and the between station single-differenced values from all the satellites are shown in the figure. The outliers shown in Figure 8 were caused by the convergence period and the satellites with unreliable ambiguity fixing. The Kp index on the corresponding periods is also shown in Figure 8. The ionospheric residuals from the short-baseline showed no obvious correlation with that of the ionospheric activity indicator. Furthermore, a daily periodic term was visible from the ionospheric error series, which are caused by the residual ionospheric errors and are correlated with the local time.
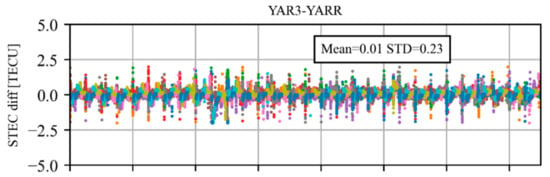
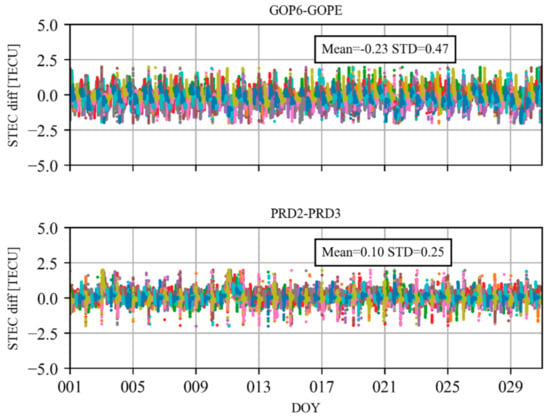
Figure 7.
Single-difference ionospheric residuals from ambiguity float PPP at two collocated stations.
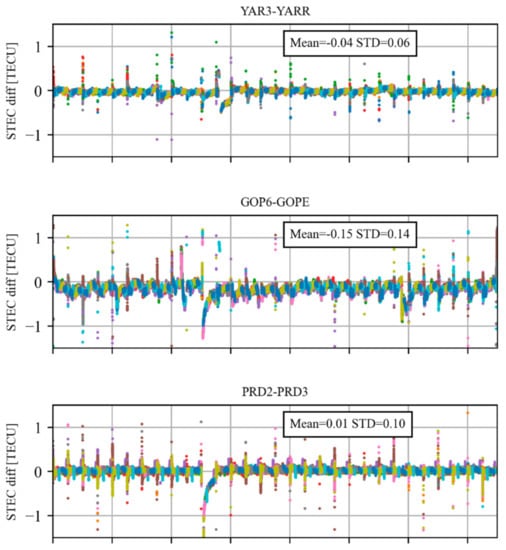
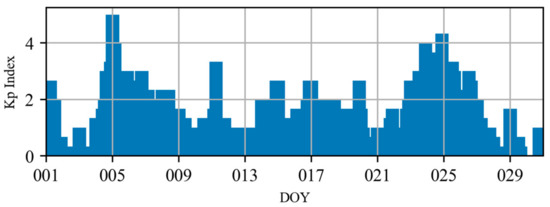
Figure 8.
Single-difference ionospheric residuals from ambiguity fixed PPP at two collocated stations and the corresponding Kp index (bottom).
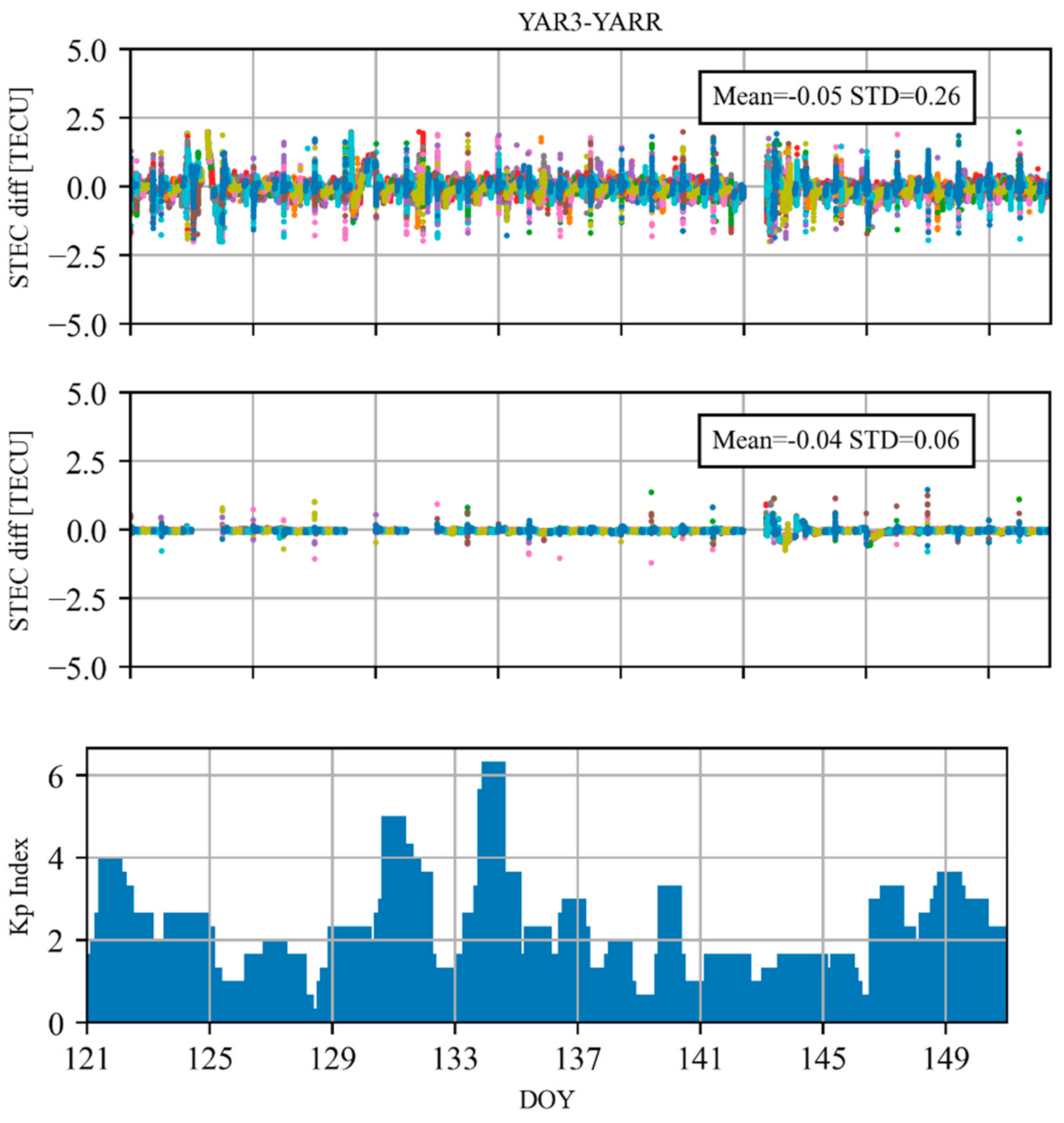
Moreover, the summer sessions during DOY 121 to 150 were also processed, and the corresponding results for the station YAR3-YARR were selected and shown in Figure 9. Results indicated that the quality of observation (DOY 123 and 128) and the precise orbit/clock products (DOY 130 and 141) were the main factor affecting the accuracy of ambiguity-fixed ionospheric corrections, which can be observed from the anomaly in the figure. In comparison, the active ionospheric condition on DOY 134 showed minor effects. To conclude, the STD of the ionospheric delay derived from PPP-AR at two collocated stations was below 0.15 TECU, which indicates that the high precision ionospheric delays can be obtained by the ambiguity-fixed PPP.

Figure 9.
Single-difference ionospheric residuals from ambiguity float (top), ambiguity fixed (middle) PPP at two collocated stations and the corresponding Kp index (bottom).
4.3. Using of CODE Global Ionosphere Products for PPP Ambiguity Resolution
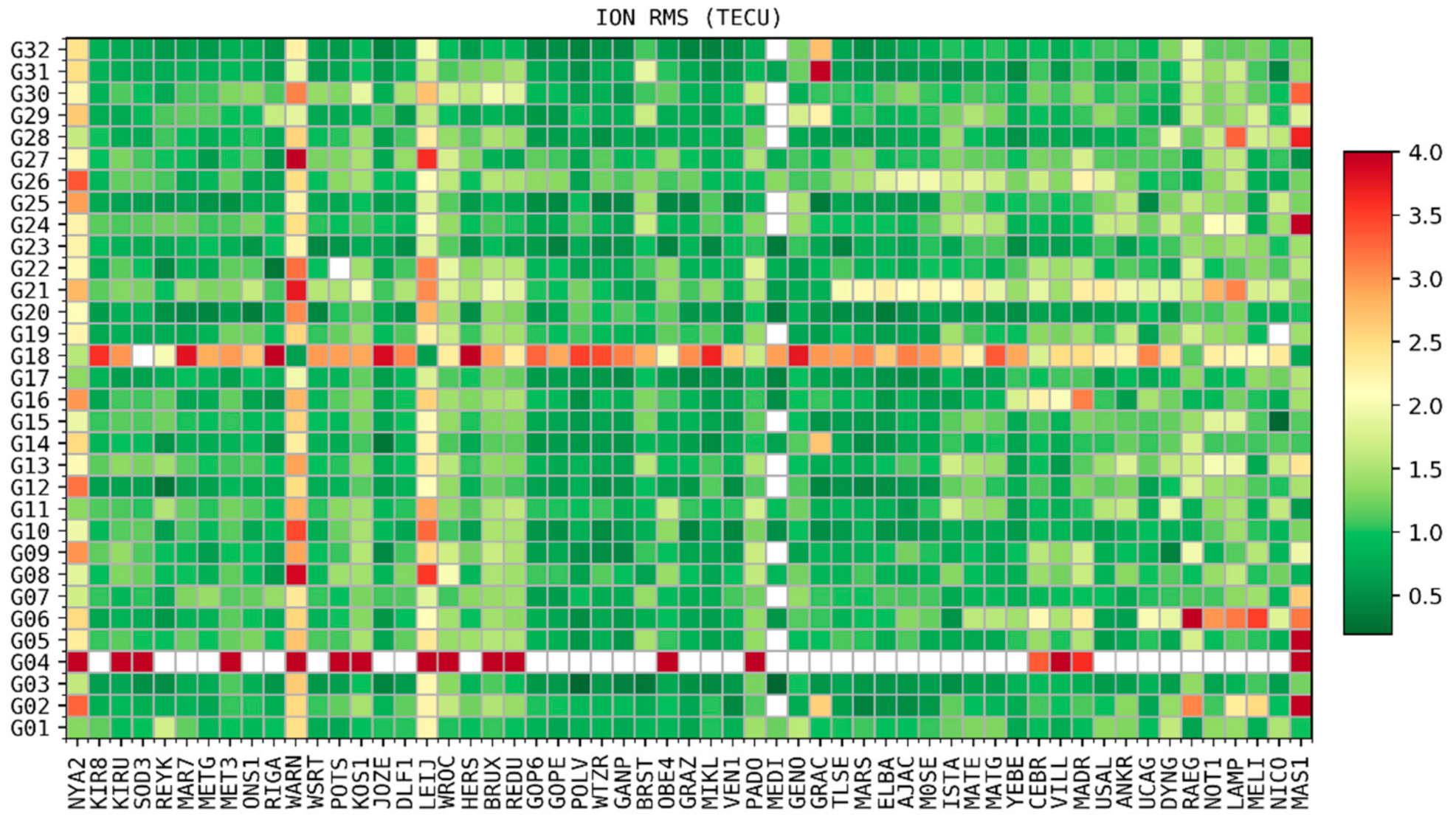
The ionospheric delays estimated from the simulated real-time ambiguity-fixed PPP were selected as a reference, while the accuracies of the interpolated ionospheric delay from the CODE global IONEX products [28] were evaluated on a station–satellite basis for all the ambiguity-fixed epochs of the daily observations. The difference compared to the real-time processing is that the PPP is not affected by the delay of the corrections in the simulated mode. The calculated ionospheric RMS is shown in Figure 10. The overall accuracy ranged from 1 to 3 TECU. However, it can be observed that the satellites G04 and G18 showed relatively poor accuracy. Moreover, stations NYA2, WARN, and LEIJ also showed a worse ionospheric accuracy which was caused mainly by the fixing rate of the ambiguity resolution.

Figure 10.
RMS of the ionospheric delay interpolated from IONEX product w.r.t. the ionospheric delays computed from PPP-AR as reference on DOY 001, 2019.
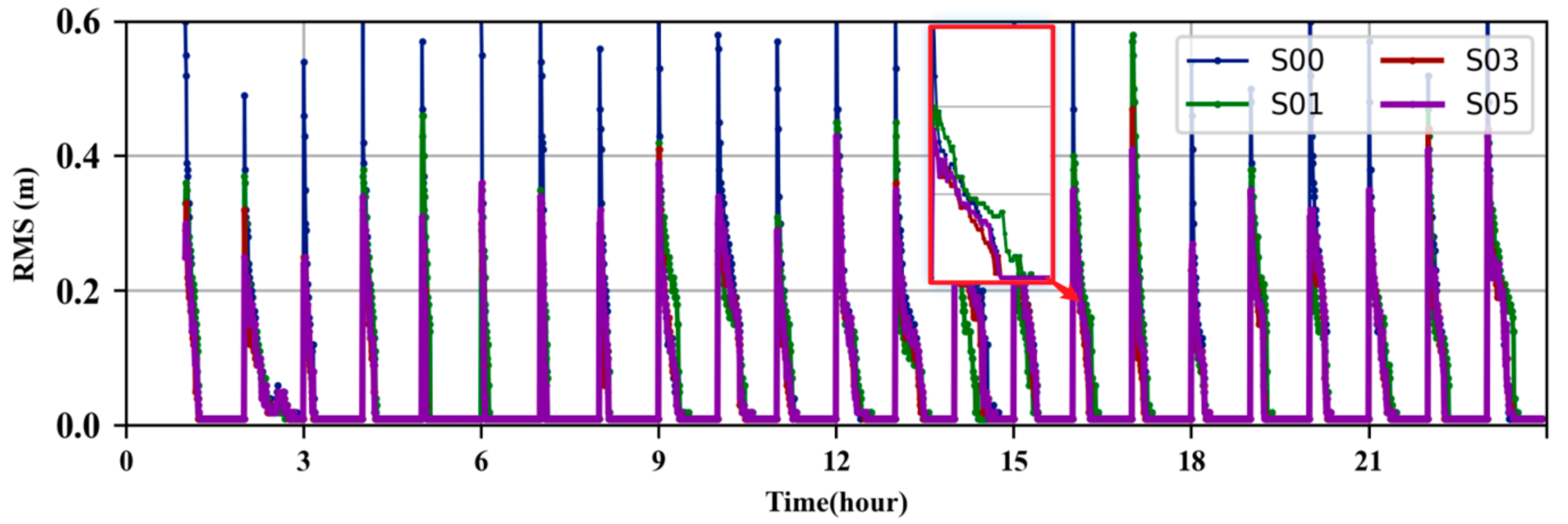
The PPP convergence is expected to be shortened when using external ionospheric products. Hence, the final global vertical ionospheric product from CODE was introduced with a priori constraints for estimating PPP re-convergence on an hourly basis, i.e., with a regular resetting of all the estimated parameters. The convergence of the positioning errors at the 50% percentile is analyzed in Figure 11. Different initial variances were used for constraining ionospheric parameters. The S00 option represents the PPP without using external ionospheric products. The S01, S03, and S05 options represent the initial ionospheric variances of 0.1, 0.3, and 0.5 m, respectively. The convergence time can be reduced using external ionospheric delays. However, it was observed that a higher weight for external ionospheric corrections (S01) might also degrade the positioning. A similar convergence time was observed for the S03 and S05 solutions, while the S05 solution showed slightly better initialization of the position within each session.
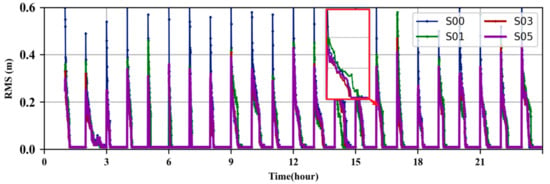
Figure 11.
Horizontal positioning errors (50% percentile) of hourly PPP solutions using different a priori constraints for external ionospheric corrections.
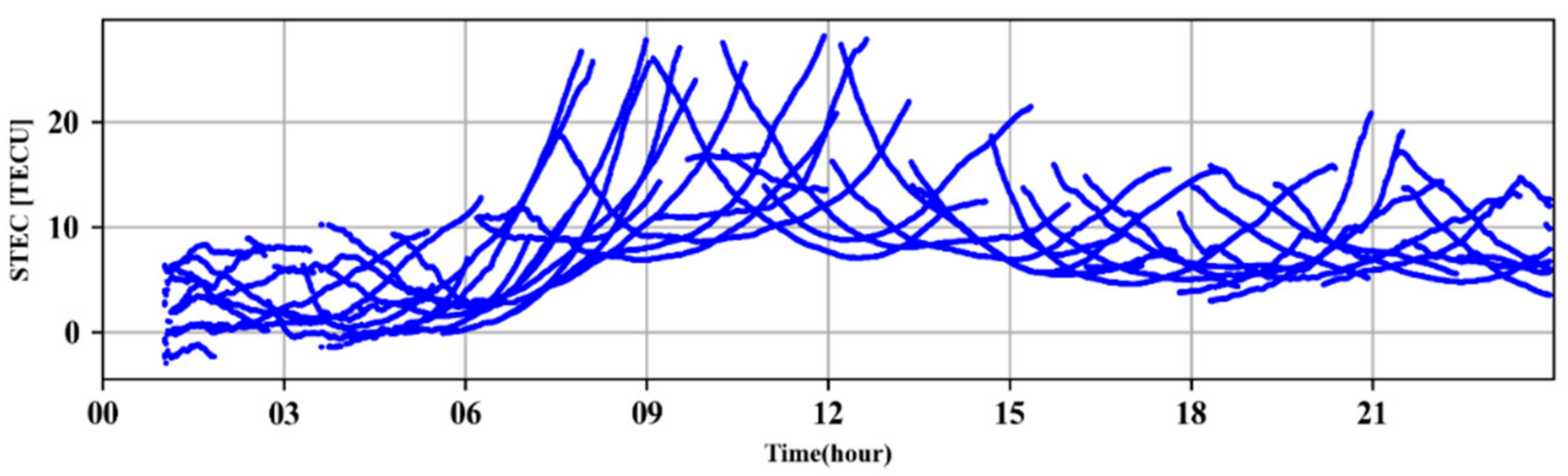
A significant difference can be observed for the convergence time comparing different hourly solutions. The PPP results between 09:00 and 15:00 (GPS time) showed a longer convergence time. Figure 12 presents the ionosphere variations from the station GOP6, which characterizes an ionospheric activity within the processing session. The negative values were caused by the inaccurate ionospheric estimates at the low elevations and convergence period of PPP. Sessions with a longer convergence time (Figure 11) corresponded to higher ionospheric activities (Figure 12). The 50% solutions from all the processed stations achieved a horizontal accuracy better than a decimeter within 5 min and 15 min within a low and high ionospheric activity, respectively.

Figure 12.
Ionosphere variability from the ambiguity-fixed PPP at station GOP6.
4.4. PPP-RTK Using Ionospheric Delay from Multi-Scale Networks
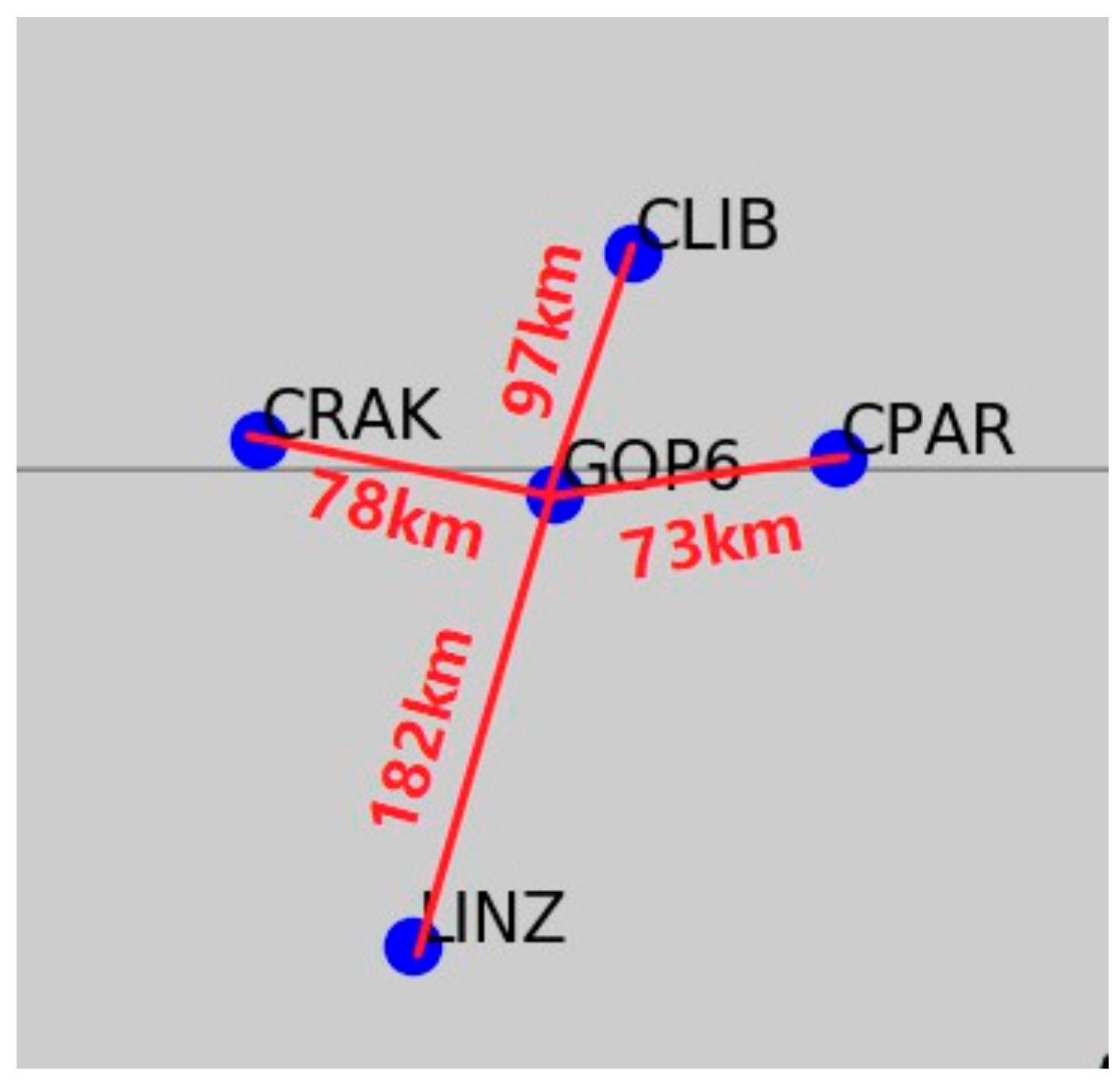
Due to a limited accuracy of the global ionosphere products, a convergence time of more than 5 min was still needed to achieve an accuracy better than a decimeter. Therefore, applying precise ionospheric corrections from a sparse reference network is more advantageous for achieving fast PPP ambiguity resolution. The vertical ionospheric delays were estimated from ambiguity-fixed PPP at the reference networks and then interpolated to the user for each satellite using the inverse distance weight method. Figure 13 shows stations selected for demonstrating PPP with a fast ambiguity resolution. Ionospheric delays observed at four reference stations with inter-station distances larger than 73 km were interpolated to a user location (GOP6 station). Although the distance between GOP6 and LINZ is 182 km, the ionosphere modeling can still profit from a better spatial geometry of available ionospheric pierce points.

Figure 13.
Stations configuration used in the PPP-RTK demonstration.
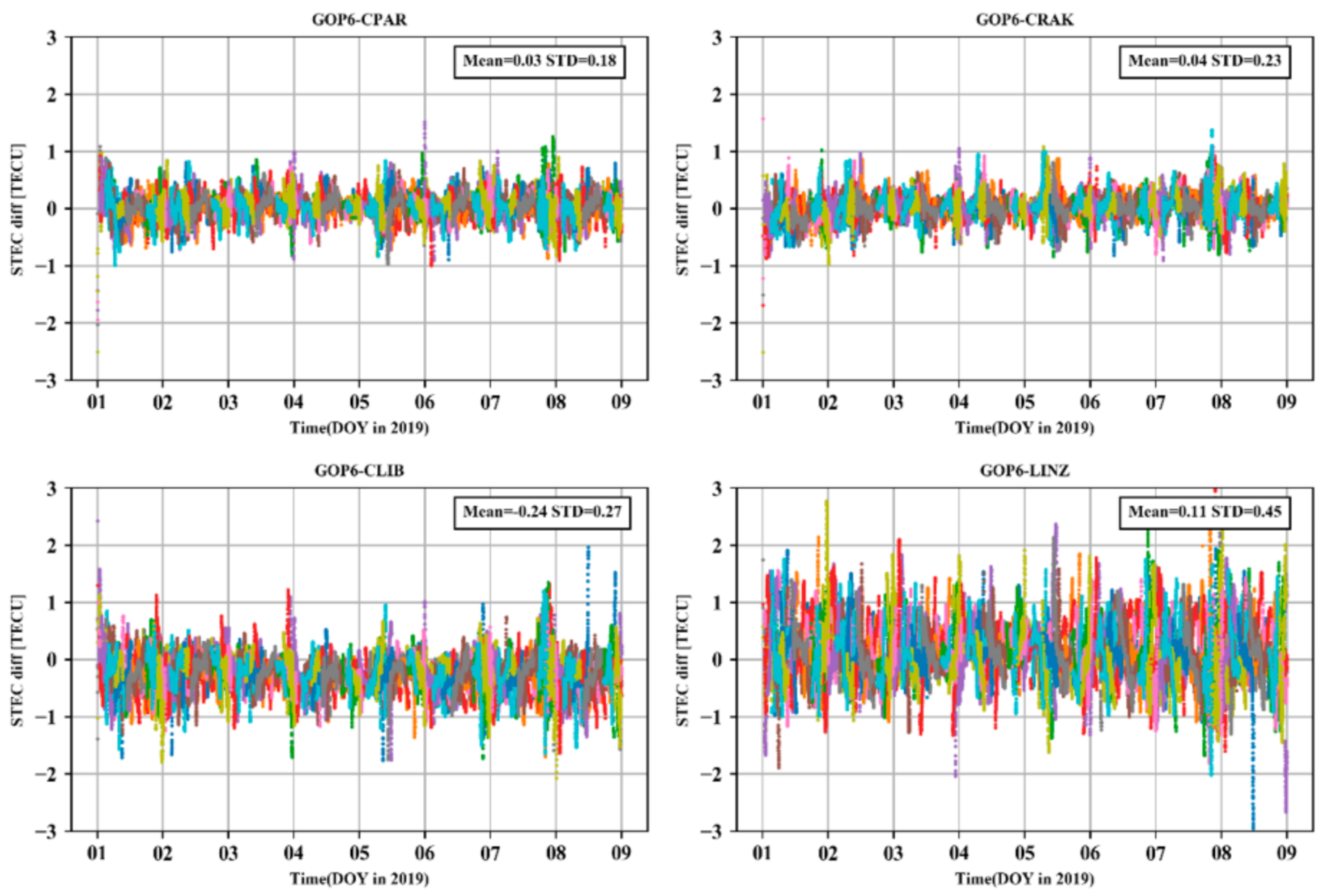
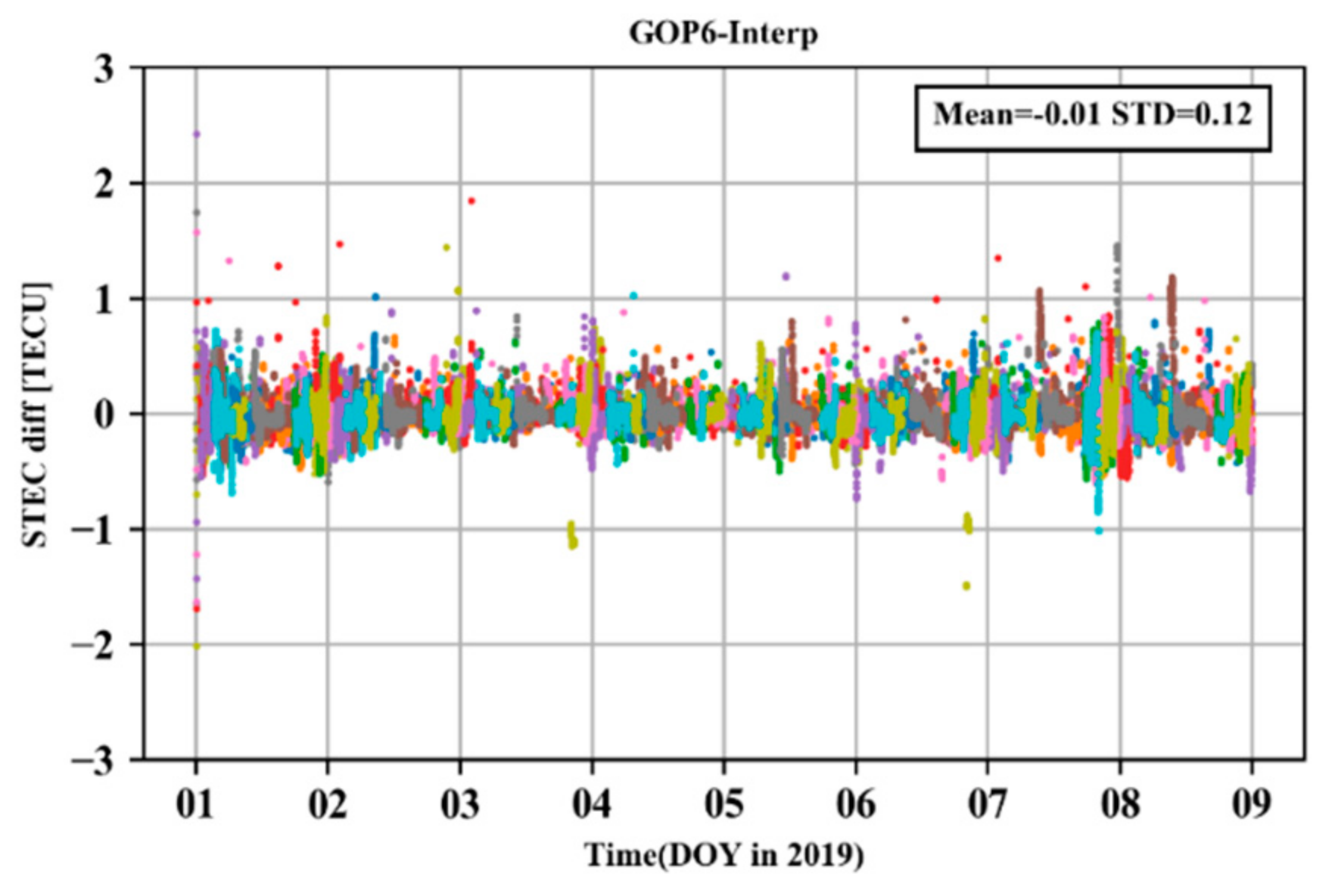
Figure 14 shows inter-station ionospheric differences derived by comparing the ambiguity-fixed ionospheric delays between the reference and the user stations. The STD of ionospheric differences varied between 0.18 and 0.45 TECU for inter-station distances of 73–182 km. The mean bias of the ionospheric errors is not related to the inter-station distance but can be attributed to hardware-related biases. The interpolated ionospheric errors for the station GOP6 were compared to the estimated ambiguity-fixed ionospheric delays (Figure 15). The mean bias and STD resulted in −0.01 TECU and 0.12 TECU, respectively. Compared to the accuracy of ionospheric delays between reference stations, the interpolation can still improve the accuracy of the ionospheric delay, which will be beneficial for the PPP-RTK.

Figure 14.
Inter-station ionospheric differences between reference stations and a user station.

Figure 15.
Comparison of interpolated and estimated ionospheric differences at a user position.
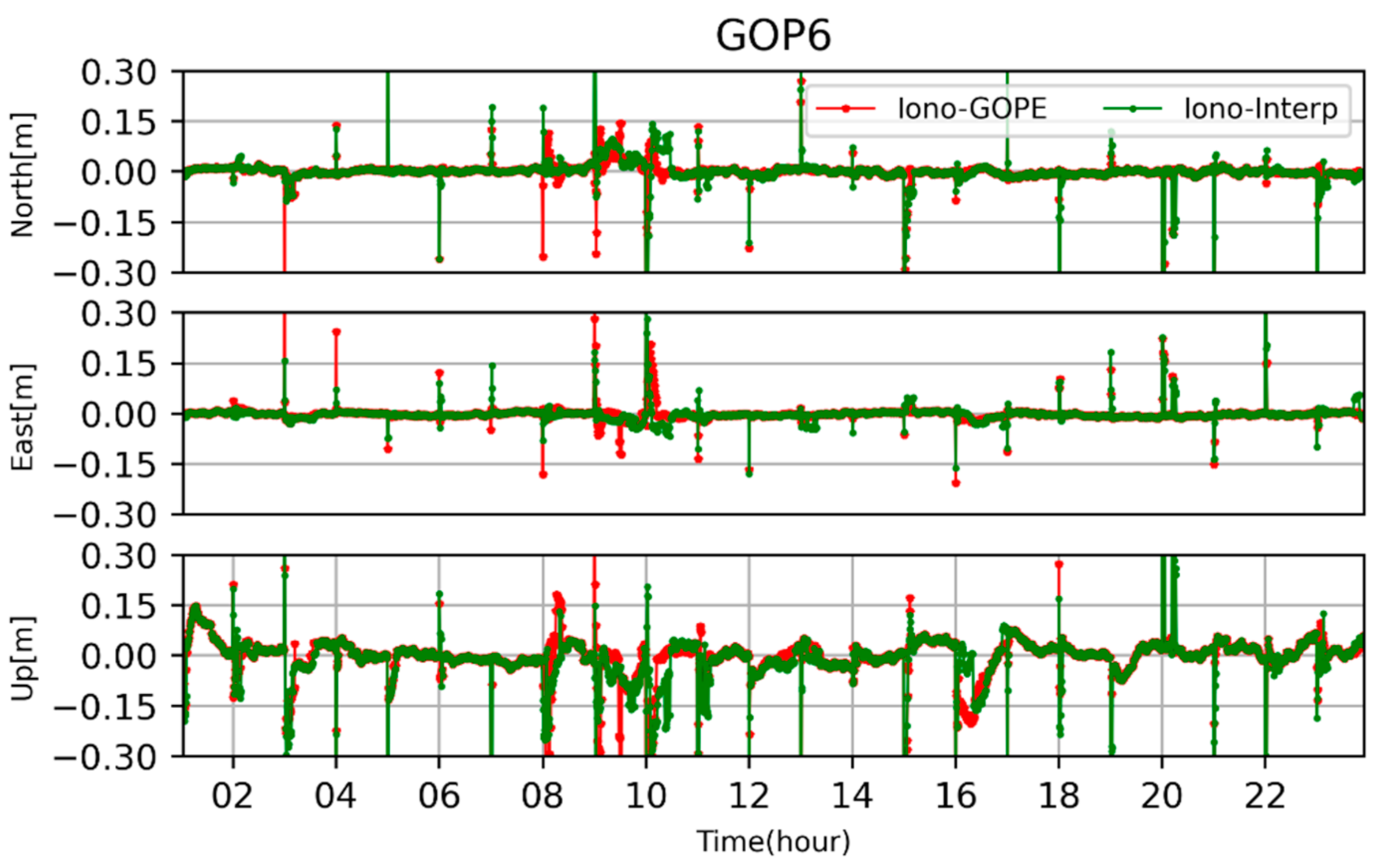
The analysis covered the Kp index ranging from 0.3 (DOY 001) to 5.0 (DOY 005), and the residual errors of the interpolated ionospheric show no significant difference. Therefore, observations from DOY 005, 2019, were used to evaluate the performance of the PPP-RTK at the station GOP6 with the estimated parameters reset every 1 h. An empirical variance of 0.15 m was used for a priori constraining of external ionospheric corrections. Figure 16 shows a comparison of the PPP-AR without applying ionospheric corrections (Iono-No) and with applying ionospheric corrections from the nearby station GOPE (Iono-GOPE). In most hourly sessions, the ambiguity resolution in the PPP-RTK was achieved within two epochs when a sampling of 30 s was applied. Besides the positioning accuracy, the correct ambiguity fixing was largely improved. Figure 17 compares the solution using the ionospheric corrections estimated from the station GOPE (Iono-GOPE) and using the interpolated corrections (Iono-Interp). A similar performance can be observed when using the two different corrections but slightly better initial positions when using corrections estimated nearby (from GOPE). The results illustrate a high precision of the ionospheric delays interpolated from selected reference stations and a feasible approach for such empirical stochastic ionosphere modeling.

Figure 16.
Position errors of ambiguity-fixed PPP without external ionospheric delays and with ionospheric corrections estimated at nearby station GOPE.

Figure 17.
Positioning errors for ambiguity-fixed PPP using ionospheric corrections from nearby station GOPE and corrections interpolated from selected reference stations.
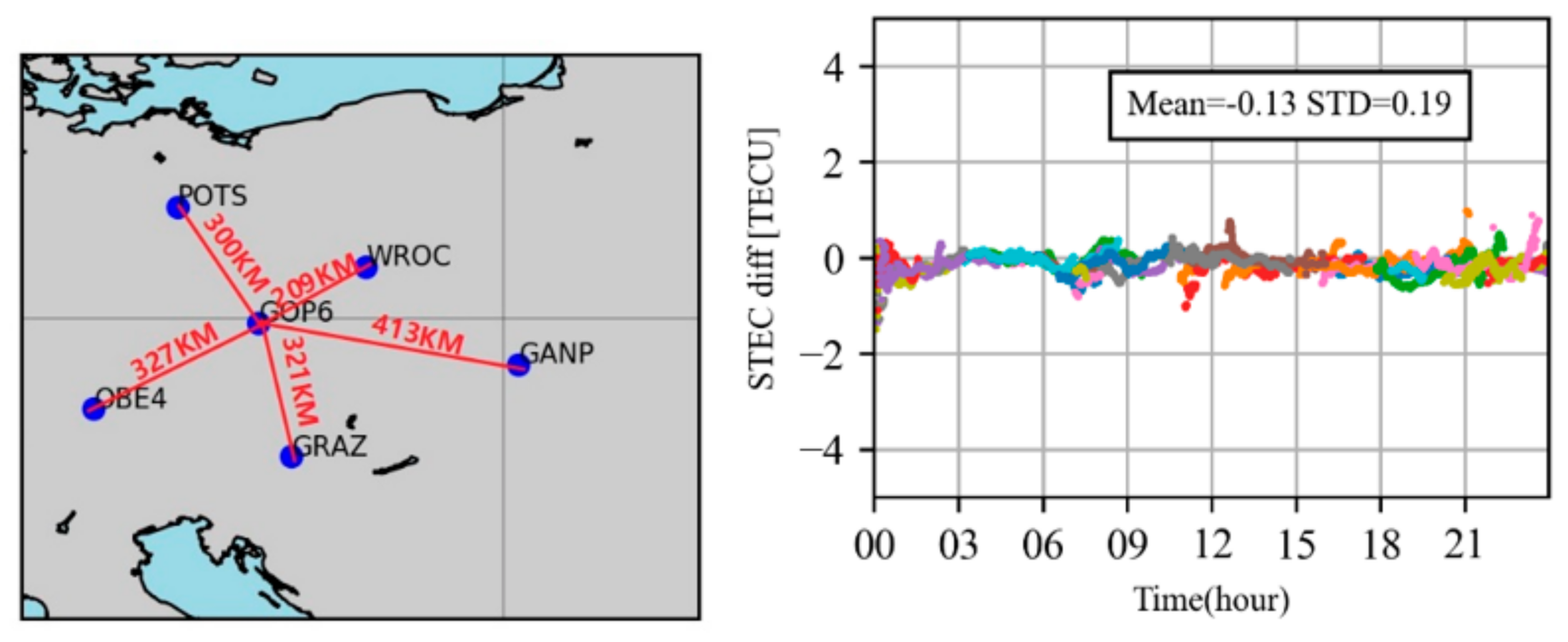
In a further test, a reference network with longer inter-station distances (209–413 km) was selected to demonstrate the impact of larger networks on the PPP-RTK. The station GOP6 was again selected as the reference station on DOY 005, 2019. The distribution of the stations and the accuracy of the interpolated ionospheric errors are shown in Figure 18. Results indicated that the STD of the ionospheric delay was 0.19 TECU. It was worse than the previous results (Figure 15), which has to be attributed to the longer inter-station distances. Figure 19 shows results comparing the ambiguity-fixed solution without external ionospheric corrections (Iono-No) and with interpolated ionospheric corrections (Iono-Interp). The performance is comparable to the results from the previous smaller network. The results indicate the potential of using sparse reference networks for PPP-RTK, which can improve the performance of a GPS and Galileo global PPP service.
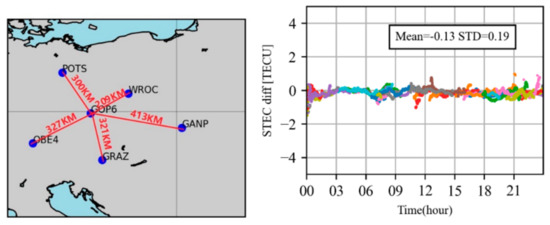
Figure 18.
Comparison of interpolated ionospheric delay for station GOP6.

Figure 19.
Position errors for ambiguity-fixed PPP without external ionospheric delays and using ionospheric corrections interpolated from stations in distances above 209 km.
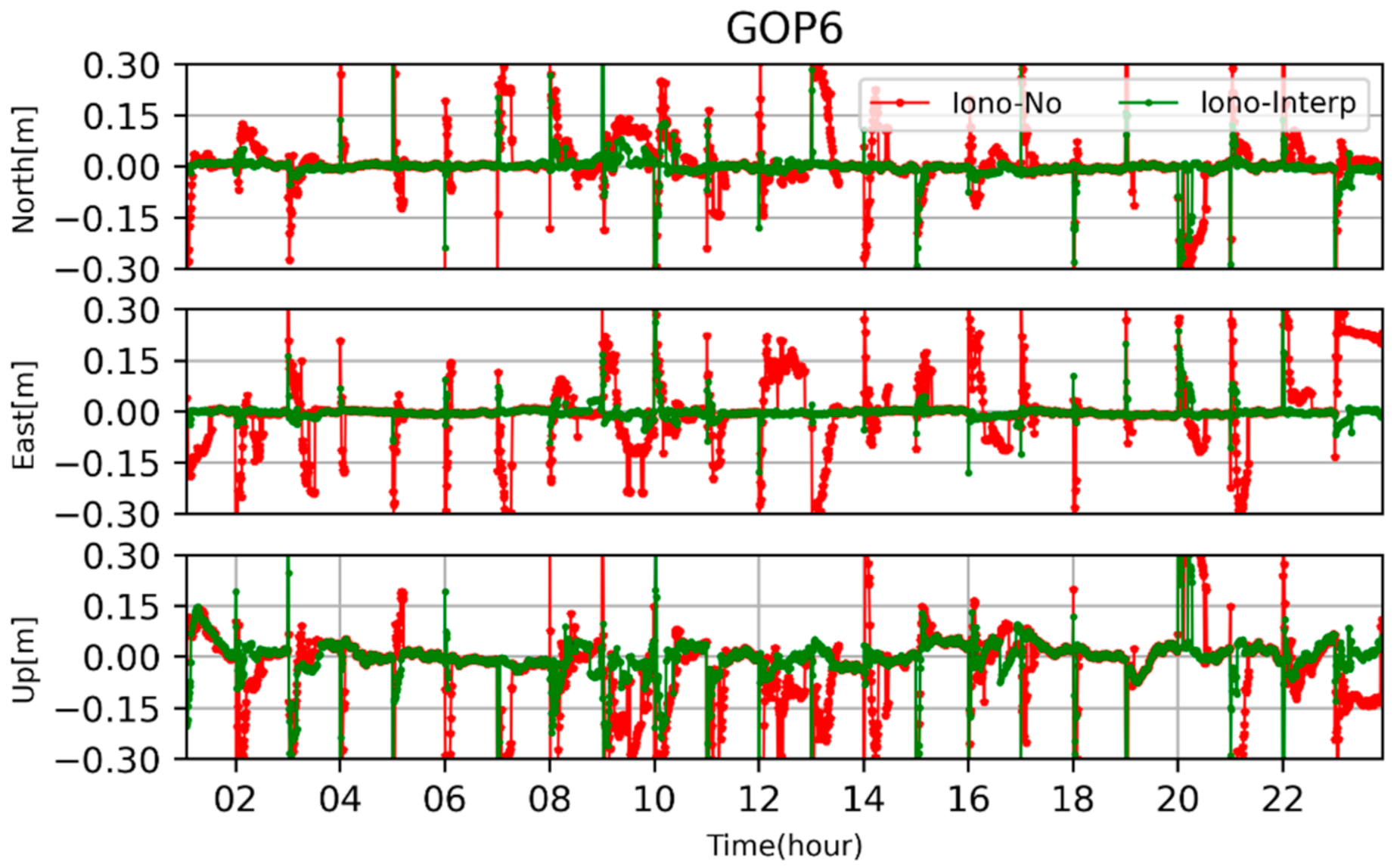
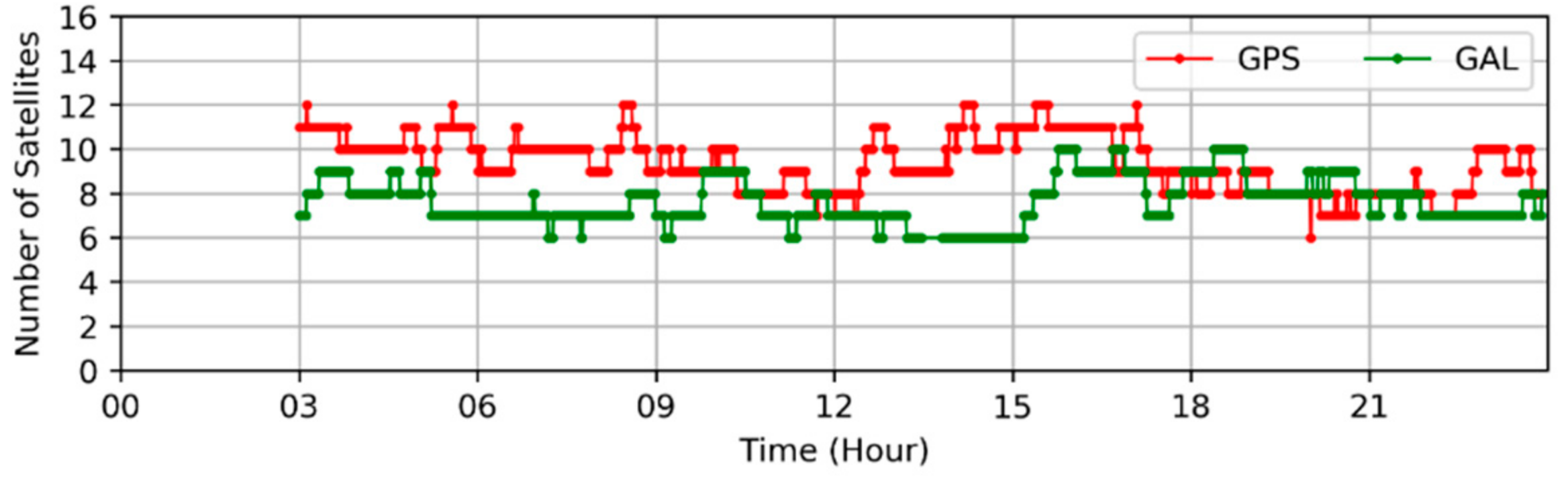
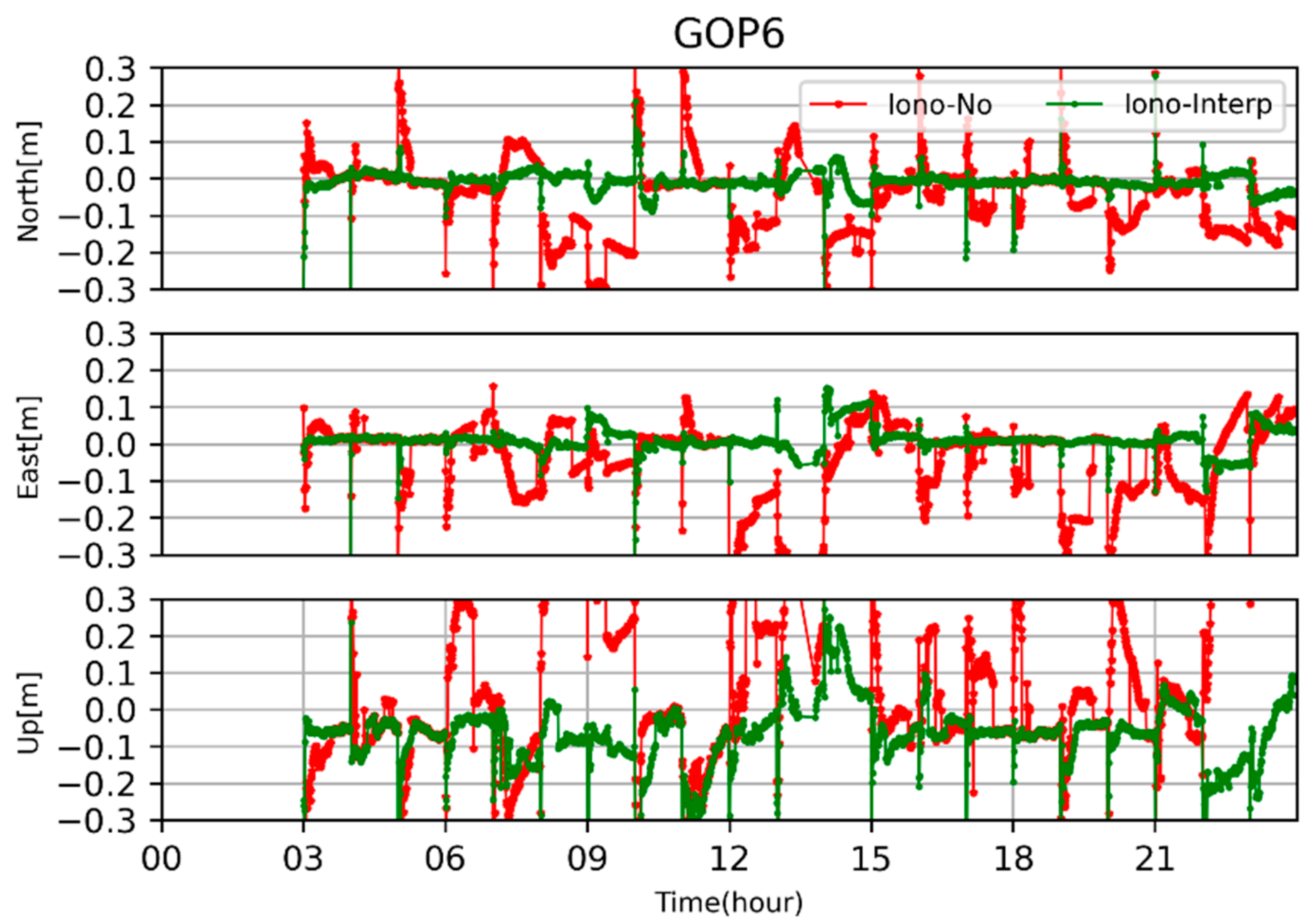
Considering the lower number of available Galileo satellites on DOY 005, 2019, observations from DOY 344, 2020 were selected to demonstrate the performance of Galileo fast PPP ambiguity resolution. It is observed from Figure 20 that the average number of satellites for Galileo was 7, which was less than that of GPS for most sessions, especially between 13:00 and 15:00. Figure 21 shows the Galileo-only PPP with an ambiguity resolution for the station GOP6 using ionospheric corrections derived from the network with an inter-station distance larger than 73 km. Though the performance of the Galileo ambiguity resolution with mode “Iono-Interp” using external corrections can be improved significantly, there were still several sessions where the Galileo PPP-RTK solution suffered from large fluctuations. The reason is mainly due to the limited number of Galileo satellites and poor geometry that degrades the fixing rate of PPP.

Figure 20.
Number of satellites tracked for GPS and Galileo on DOY 344, 2020 at GOP6 stations.

Figure 21.
Performance of Galileo-only ambiguity-fixed PPP without and with external ionospheric corrections.
Note that the experimental analysis during 2019 was in relatively quiet ionospheric conditions. The performance of the proposed method was affected by the ionospheric disturbance, which will degrade the fixing rate of the PPP ambiguities. The Satellite-specific Epoch-differenced Ionospheric Delay (SEID) model proposed by Deng et al. [29] can also be used to derive the precise ionospheric corrections from networks, which has been validated comparing the total zenith delays and positioning [30]. Though it was derived from phase observations with float ambiguities, precise ionospheric corrections can be obtained from two successive epochs without cycle slips. The SEID method was not affected by the ambiguity resolution and validation procedure which might show better performance under ionospheric disturbance conditions. However, the accuracy and compatibility of the ionospheric delays derived from the two methods under different ionospheric conditions still deserve further investigation.
5. Conclusions
A long convergence time is still the obstacle limiting the application of PPP. Achieving the PPP ambiguity resolution and introducing the external atmosphere correction are the generally used technique to shorten the convergence time and improve the accuracy of PPP. We proposed a method to estimate the ionospheric delays together with the receiver hardware delays from ambiguity-fixed PPP. The performance of PPP using the ambiguity fixing method, the global ionospheric delay corrections, and the multi-scale ambiguity-fixed ionospheric correction from a regional permeant network was assessed using the data during a low solar activity period.
First, the contribution of the ambiguity fixing method to PPP convergence was assessed. For traditional ambiguity-float PPP, an averaged convergence time of 30 min and 20 min is needed to reach a decimeter level horizontal and vertical positioning accuracy. After applying the ambiguity-fixing procedure, the convergence time could be reduced to 24 min and 13 min, respectively.
Then, the performance of the ionospheric delays derived from the proposed method was assessed using three short-baseline validations covering different ionospheric conditions during the winter and summer sessions. The mean bias and standard deviation of the ionospheric differences derived from the ambiguity-fixed PPP were within 0.15 TECU. More than 60% improvements could be observed compared to the ambiguity float solution. With the ionospheric delay from the ambiguity-fixed PPP as a reference, the accuracy of the CODE global ionospheric map was 1-3 TECU. After applying proper constraints, the convergence time using CODE products could be shortened to 5 min and 15 min related to the daily ionospheric activity.
Finally, precise ionospheric corrections were interpolated using the reference networks with the inter-station distance range from 73 km to 209 km. The GPS-only and Galileo-only PPP-RTK with precise ionospheric augmentation were validated. For the GPS-only PPP-RTK, ambiguity fixing could be achieved within several epochs using 30-second samplings. The performance of Galileo-only PPP-RTK was worse than that of GPS due to fewer available satellites, but the accuracy and the ambiguity fixing rate could be largely improved with external precise ionospheric corrections.
Author Contributions
Lewen Zhao conceived the presented idea. Lewen Zhao, Jan Douša and Pavel Václavovic implement the method and performed the computations. Jan Douša discussed the results and contributed to the final manuscript. All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the Startup Project for Introducing Talent of NUIST (2019r081); and Natural Science Foundation of Jiangsu Province (20KJB170008).
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
GNSS data and precise product files are available through public IGS and EUREF data centers (ftp://igs.bkg.bund.de/EUREF/; https://cddis.nasa.gov/archive/gnss/ (accessed on 29 July 2021)). The precise orbit and clock products from CNES are available at ftp://94.23.202.142/PRODUCTS/REAL_TIME/ (accessed on 29 July 2021).
Acknowledgments
The authors would like to thank the IGS network and EUREF network for providing multi-GNSS data; IGS MGEX for providing the precise orbits, clocks and biases correction files. Center for Orbit Determination in Europe (CODE) is acknowledged for providing of the global ionospheric models, the GeoForschungsZentrum Potsdam (GFZ) for providing multi-GNSS precise orbits and clocks, the National Centre for Space Studies (CNES) for providing real-time precise orbit, clocks and biases corrections.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Zumberge, J.F.; Heflin, M.B.; Jefferson, D.C.; Watkins, M.M.; Webb, F.H. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geoph. Res. Solid Earth 1997, 102, 5005–5017. [Google Scholar] [CrossRef] [Green Version]
- Geng, J.; Teferle, F.N.; Meng, X.; Dodson, A.H. Kinematic precise point positioning at remote marine platforms. GPS Solut. 2010, 14, 343–350. [Google Scholar] [CrossRef]
- Ge, M.; Gendt, G.; Rothacher, M.; Shi, C.; Liu, J. Resolution of GPS carrier-phase ambiguities in precise point positioning (PPP) with daily observations. J. Geod. 2008, 82, 389–399. [Google Scholar] [CrossRef]
- Wabbena, G.; Schmitz, M.; Bagge, A. PPP-RTK: Precise Point Positioning using state-space representation in RTK networks. In Proceedings of the 18th International Technical Meeting of the Satellite Division of The Institute of Navigation (ION GNSS 2005), Long Beach, CA, USA, 13–16 September 2005; Volume 5, pp. 13–16. [Google Scholar]
- De Oliveira, P.S.; Morel, L.; Fund, F.; Legros, R.; Monico, J.F.G.; Durand, S.; Durand, F. Modeling tropospheric wet delays with dense and sparse network configurations for PPP-RTK. GPS Solut. 2017, 21, 237–250. [Google Scholar] [CrossRef] [Green Version]
- Psychas, D.; Verhagen, S.; Liu, X.; Memarzadeh, Y.; Visser, H. Assessment of ionospheric corrections for PPP-RTK using regional ionosphere modelling. Meas. Sci. Technol. 2018, 30, 014001. [Google Scholar] [CrossRef] [Green Version]
- Teunissen, P.J.G.; Odijk, D.; Zhang, B. PPP-RTK: Results of CORS network-based PPP with integer ambiguity resolution. J. Aeronaut. Astronaut. Aviat. 2010, 42, 223–230. [Google Scholar]
- Li, X.; Zhang, X.; Ge, M. Regional reference network augmented precise point positioning for instantaneous ambiguity resolution. J. Geod. 2011, 85, 151–158. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G.; Odijk, D. A Novel Un-differenced PPP-RTK Concept. J. Navig. 2011, 64, S180–S191. [Google Scholar] [CrossRef] [Green Version]
- Li, Z.; Chen, W.; Ruan, R.; Liu, X. Evaluation of PPP-RTK based on BDS-3/BDS-2/GPS observations: A case study in Europe. GPS Solut. 2020, 24, 1–12. [Google Scholar] [CrossRef]
- Psychas, D.; Verhagen, S. Real-time PPP-RTK performance analysis using ionospheric corrections from multi-scale network configurations. Sensors 2020, 20, 3012. [Google Scholar] [CrossRef] [PubMed]
- BeiDou Navigation Satellite System Signal in Space Interface Control Document: Precise Point Positioning Service Signal PPP-B2b (Version 1.0). Available online: http://en.beidou.gov.cn/SYSTEMS/Officialdocument/202008/P020200803544810243992.pdf (accessed on 12 April 2021).
- Galileo High Accuracy Service (HAS). Available online: https://www.gsc-europa.eu/sites/default/files/sites/all/files/Galileo_HAS_Info_Note.pdf (accessed on 12 April 2021). [CrossRef]
- Schaer, S.; Beutler, G.; Rothacher, M.; Springer, T.A. Global ionosphere maps based on GPS carrier phase data routinely produced by the code analysis center. In Proceedings of the IGS Analysis Center Workshop 1996, Silver Spring, MD, USA, 19–21 March 1996. [Google Scholar]
- Bruyninx, C.; Legrand, J.; Fabian, A.; Pottiaux, E. GNSS metadata and data validation in the EUREF Permanent Network. GPS Solut. 2019, 23, 106. [Google Scholar] [CrossRef]
- Liu, T.; Zhang, B.; Yuan, Y.; Li, Z.; Wang, N. Multi-GNSS triple-frequency differential code bias (DCB) determination with precise point positioning (PPP). J. Geod. 2019, 93, 765–784. [Google Scholar] [CrossRef]
- Zhang, B.; Teunissen, P.J.G. Characterization of multi-GNSS between-receiver differential code biases using zero and short baselines. Sci. Bull. 2015, 60, 1840–1849. [Google Scholar] [CrossRef] [Green Version]
- Zha, J.; Zhang, B.; Yuan, Y.; Zhang, X.; Li, M. Use of modified carrier-to-code leveling to analyze temperature dependence of multi-GNSS receiver DCB and to retrieve ionospheric TEC. GPS Solut. 2019, 23, 103. [Google Scholar] [CrossRef]
- Jin, S.; Su, K. PPP models and performances from single-to quad-frequency BDS observations. Satell. Navig. 2020, 1, 1–13. [Google Scholar] [CrossRef]
- Laurichesse, D.; Blot, A. Fast PPP convergence using multi-constellation and triple-frequency ambiguity resolution. In Proceedings of the ION GNSS 2016, Portland, OR, USA, 12–16 September 2016. [Google Scholar]
- Deng, Z.; Fritsche, M.; Uhlemann, M.; Wickert, J.; Schuh, H. Reprocessing of GFZ multi-GNSS product GBM. In Proceedings of the IGS Workshop 2016, Sydney, Australia, 8–12 February 2016. [Google Scholar]
- Vaclavovic, P.; Nesvatba, O. Comparison and assessment of float, fixed, and smoothed Precise Point Positioning. Acta Geodyn. Geomat. 2020, 17, 329–340. [Google Scholar] [CrossRef]
- Václavovic, P.; Douša, J.; Gyori, G. G-Nut software library—State of development and first results. Acta Geodyn. Geomat. 2013, 10, 431–436. [Google Scholar] [CrossRef] [Green Version]
- Montenbruck, O.; Hauschild, A.; Steigenberger, P. Differential code bias estimation using multi-GNSS observations and global ionosphere maps. In Proceedings of the 2014 International Technical Meeting of the Institute of Navigation, San Diego, CA, USA, 27–29 January 2014; pp. 802–812. [Google Scholar]
- Laurichesse, D. Phase Biases for Ambiguity Resolution: From an Undifferenced to an Uncombined Formulation; CNES White Paper; CNES: Paris, France, 2015. [Google Scholar]
- Seeber, G. Satellite Geodesy: Foundations, Methods and Applications. Int. Hydrogr. Rev. 2003, 4, 92–93. [Google Scholar]
- Mungufeni, P.; Habarulema, J.B.; Jurua, E. Modeling of ionospheric irregularities during geomagnetically disturbed conditions over African low-latitude region. Space Weather. 2016, 14, 710–723. [Google Scholar] [CrossRef]
- Dach, R.; Schaer, S.; Arnold, D.; Orliac, E.; Prange, L.; Susnik, A.; Villiger, A.; Jäggi, A. CODE Final Product Series for the IGS; Astronomical Institute, University of Bern: Bern, Switzerland, 2016. [Google Scholar]
- Deng, Z.; Bender, M.; Dick, G.; Ge, M.; Wickert, J.; Ramatschi, M.; Zou, X. Retrieving tropospheric delays from GPS networks densified with single frequency receivers. Geophys. Res. Lett. 2009, 36, 308. [Google Scholar] [CrossRef]
- Hong, J.; Tu, R.; Zhang, R.; Fan, L.; Han, J.; Zhang, P.; Lu, X. Analysis of dual-frequency solution method for single-frequency precise point positioning based on SEID model for GPS and BDS. Measurement 2021, 175, 109102. [Google Scholar] [CrossRef]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).