
Parameter-Adaptive Event-Triggered Sliding Mode Control for a Mobile Robot

 , ,
, ,
Abstract
:1. Introduction
- (1)
- A novel event-triggered sliding mode controller for the kinematic model of a mobile robot is designed to reduce the computational work of the microcontroller.
- (2)
- An adaptive scheme is combined with the event-triggered sliding mode controller to estimate the parameters of the mobile robot. This ensures that the control performance of the proposed control is kept robust in the presence of uncertainties and unknown parameters.
- (3)
- Simulation and experiment results in different scenarios are given to validate the proposed controller.
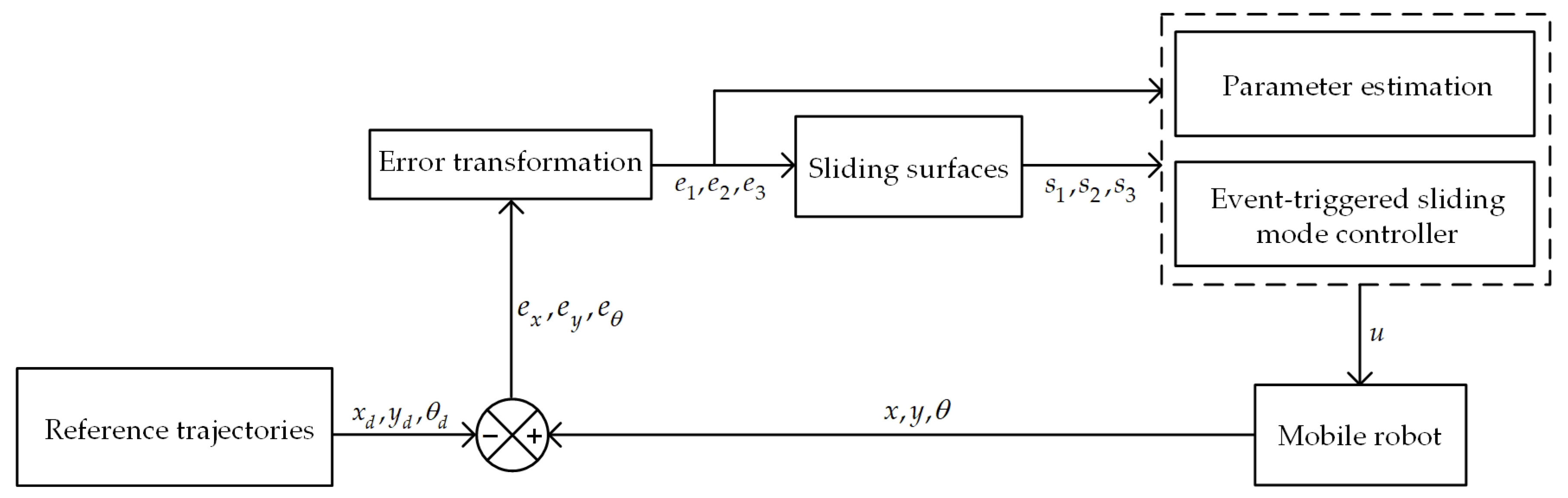
2. Controller Design
2.1. Parameter-Adaptive Sliding Mode Controller
2.2. Parameter-Adaptive Event-Triggered Sliding Mode Controller
3. Simulation and Experimental Description
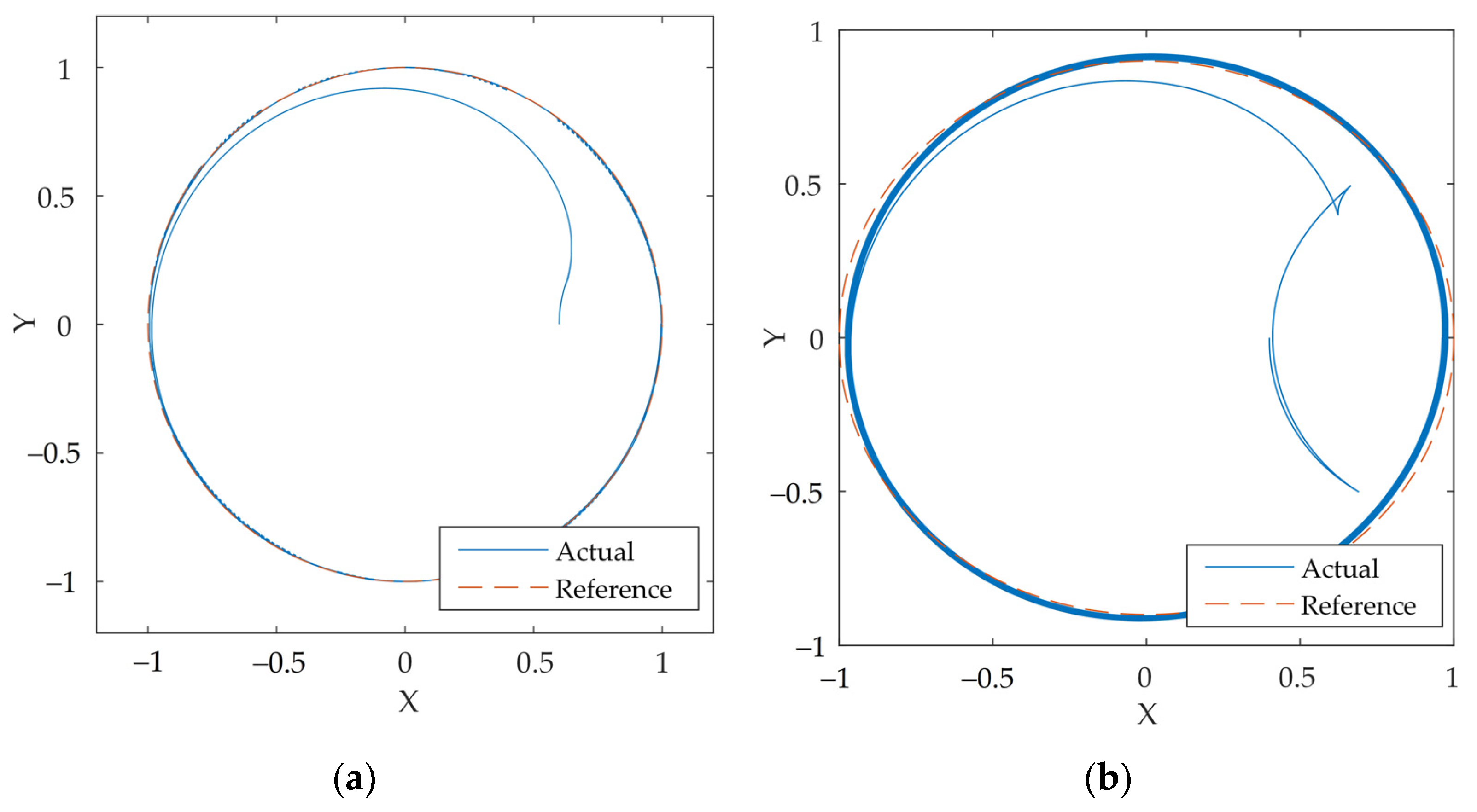
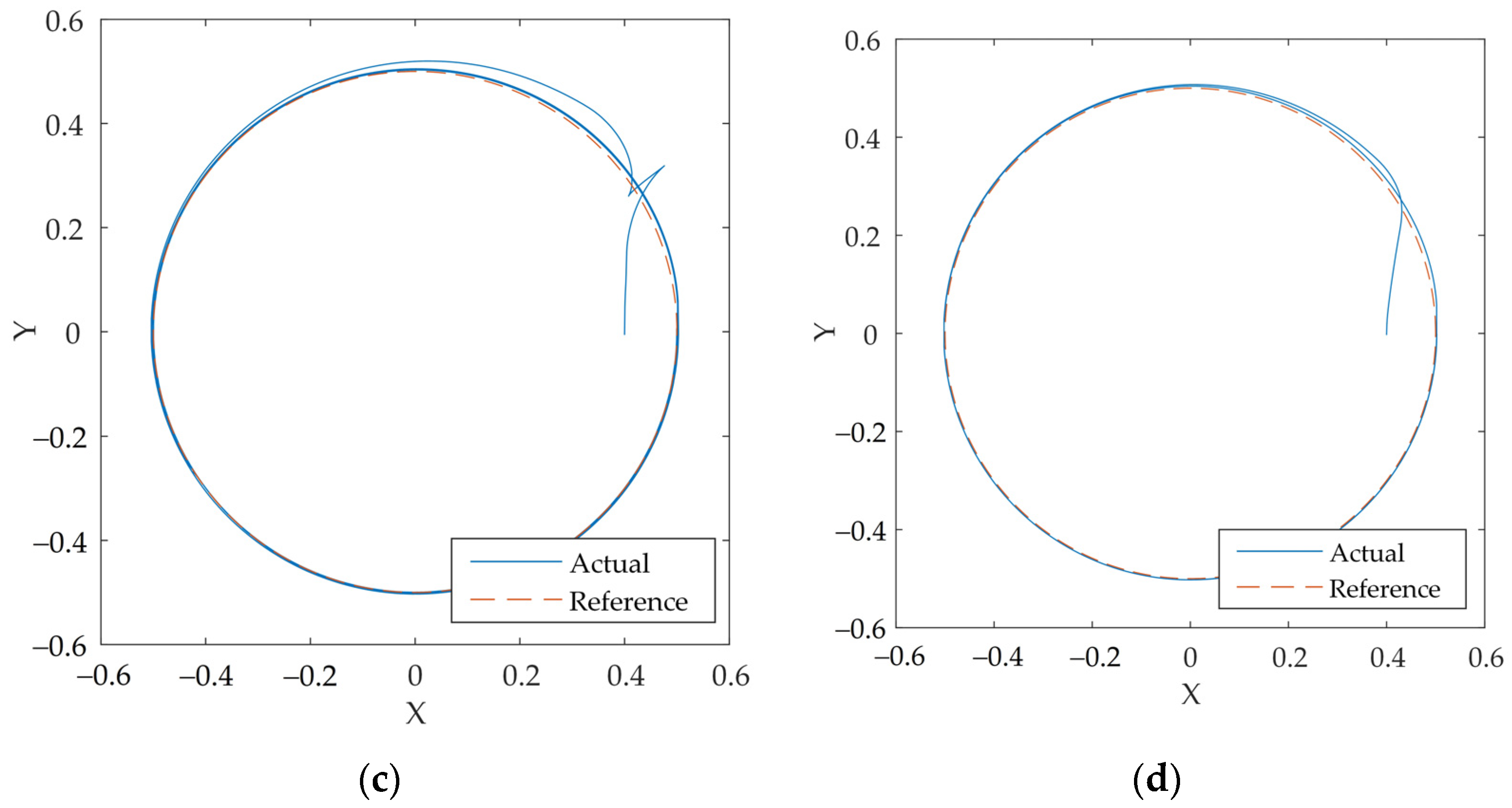
3.1. Simulation Scenario
3.1.1. Scenario 1
3.1.2. Scenario 2
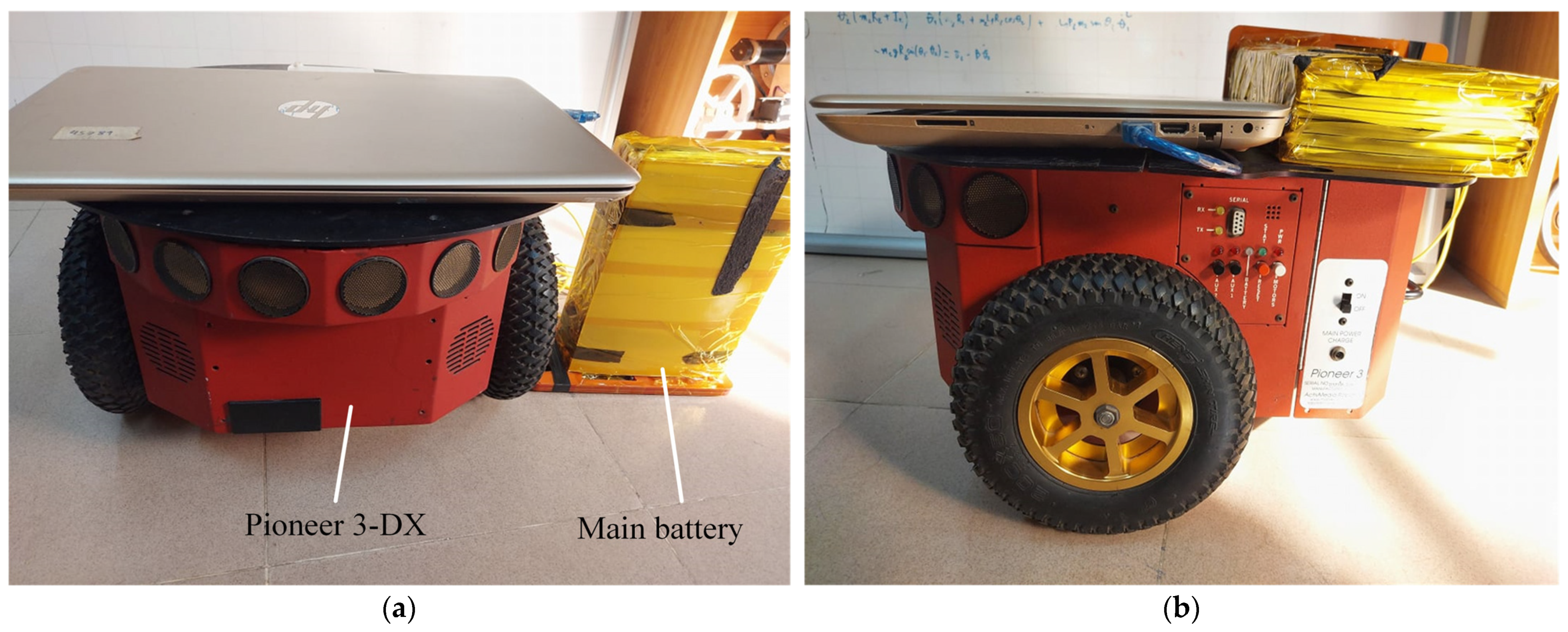
3.2. Experimental Scenario
3.2.1. Event-Triggered Scenario
3.2.2. Time-Triggered Scenario
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Meng, L.; Lin, Y.; Gu, H.; Xu, H.; Geng, L. A New Type of Small Underwater Robot for Small Scale Ocean Observation. In Proceedings of the 6th Annual IEEE International Conference on Cyber Technology in Automation, Control and Intelligent Systems, IEEE-CYBER 2016, Chengdu, China, 19–22 June 2016; pp. 152–156. [Google Scholar] [CrossRef]
- Khatib, O.; Yeh, X.; Brantner, G.; Soe, B.; Kim, B.; Ganguly, S.; Stuart, H.; Wang, S.; Cutkosky, M.; Edsinger, A.; et al. Ocean one: A robotic avatar for oceanic discovery. IEEE Robot. Autom. Mag. 2016, 23, 20–29. [Google Scholar] [CrossRef]
- Bevacqua, G.; Cacace, J.; Finzi, A.; Lippiello, V. Mixed-initiative planning and execution for multiple drones in search and rescue missions. Proc. Int. Conf. Autom. Plan. Sched. 2015, 25, 315–323. Available online: https://ojs.aaai.org/index.php/ICAPS/article/view/13700 (accessed on 3 May 2022).
- Ferriere, L.; Raucent, B.; Campion, G. Design of omnimobile robot wheels. In Proceedings of the IEEE International Conference on Robotics and Automation, Minneapolis, MN, USA, 22–28 April 1996; Volume 4, pp. 3664–3670. [Google Scholar] [CrossRef]
- Soto, M.; Nava, P.A.; Alvarado, L.E. Drone formation control system real-time path planning. Collect. Tech. Pap.–2007 AIAA InfoTech Aerosp. Conf. 2007, 1, 606–639. [Google Scholar] [CrossRef]
- Thrun, S.; Bennewitz, M.; Burgard, W.; Cremers, A.B.; Dellaert, F.; Fox, D.; Hahnel, D.; Rosenberg, C.; Roy, N.; Schulte, J.; et al. MINERVA: A second-generation museum tour-guide robot. In Proceedings of the IEEE International Conference on Robotics and Automation, Detroit, MI, USA, 10–15 May 1999; Volume 3, pp. 1999–2005. [Google Scholar] [CrossRef]
- Triebel, R.; Arras, K.; Alami, R.; Beyer, L.; Breuers, S.; Chatila, R.; Chetouani, M.; Cremers, D.; Evers, V.; Fiore, M.; et al. SPENCER: A socially aware service robot for passenger guidance and help in busy airports. Springer Tracts Adv. Robot. 2016, 113, 607–622. [Google Scholar] [CrossRef] [Green Version]
- Marder-Eppstein, E.; Berger, E.; Foote, T.; Gerkey, B.; Konolige, K. The office marathon: Robust navigation in an indoor office environment. In Proceedings of the IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 300–307. [Google Scholar] [CrossRef]
- Kanda, T.; Shiomi, M.; Miyashita, Z.; Ishiguro, H.; Hagita, N. An affective guide robot in a shopping mall. In Proceedings of the 4th ACM/IEEE International Conference on Human-Robot Interaction, HRI’09, La Jolla, CA, USA, 9 March 2008; pp. 173–180. [Google Scholar] [CrossRef] [Green Version]
- Kanayama, Y.; Miyazaki, F.; Kimura, Y.; Noguchi, T. A Stable Tracking Control Method for a Non-Holonomic Mobile Robot. Appl. Opt. 1991, 30, 523–530. [Google Scholar]
- Nakamura, Y.; Savant, S. Nonholonomic motion control of an autonomous underwater vehicle. In Proceedings of the IROS ’91:IEEE/RSJ International Workshop on Intelligent Robots and Systems ’91, Osaka, Japan, 3–5 November 2002; pp. 1254–1259. [Google Scholar] [CrossRef]
- Samson, C.; Ait-Abderrahim, K. Feedback control of a nonholonomic wheeled cart in Cartesian space. In Proceedings of the IEEE International Conference on Robotics and Automation, Sacramento, CA, USA, 9–11 April 1991; Volume 2, pp. 1136–1141. [Google Scholar] [CrossRef]
- Sampei, M.; Tamura, T.; Itoh, T.; Nakamichi, M. Path tracking control of trailer-like mobile robot. IROS 1992, 91, 193–198. [Google Scholar] [CrossRef]
- Fierro, R.; Lewis, F.L. Control of a nonholonomic mobile robot: Backstepping kinematics into dynamics. In Proceedings of the 1995 34th IEEE Conference on Decision and Control, New Orleans, LA, USA, 13–15 December 1995; Volume 4, pp. 3805–3810. [Google Scholar] [CrossRef]
- Shih, C.L.; Lin, L.C. Trajectory planning and tracking control of a differential-drive mobile robot in a picture drawing application. Robotics 2017, 6, 17. [Google Scholar] [CrossRef] [Green Version]
- Chang, Y.C.; Chen, B. Sen Adaptive tracking control design of nonholonomic mechanical systems. In Proceedings of the 35th IEEE Conference on Decision and Control, Kobe, Japan, 13 December 1996; Volume 4, pp. 4739–4744. [Google Scholar] [CrossRef]
- Gusev, S.V.; Makarov, I.A.; Paromtchik, I.E.; Yakubovich, V.A.; Laugier, C. Adaptive motion control of a nonholonomic vehicle. Proc.–IEEE Int. Conf. Robot. Autom. 1998, 4, 3285–3290. [Google Scholar] [CrossRef]
- Unluturk, A.; Aydogdu, O. Adaptive control of two-wheeled mobile balance robot capable to adapt different surfaces using a novel artificial neural network-based real-time switching dynamic controller. Int. J. Adv. Robot. Syst. 2017, 14, 1729881417700893. [Google Scholar] [CrossRef]
- Dengler, C.; Lohmann, B. Adjustable and adaptive control for an unstable mobile robot using imitation learning with trajectory optimization. Robotics 2020, 9, 29. [Google Scholar] [CrossRef]
- Gómez Ortega, J.; Camacho, E.F. Mobile robot navigation in a partially structured static environment, using neural predictive control. Control Eng. Pract. 1996, 4, 1669–1679. [Google Scholar] [CrossRef]
- Zhang, T.; Kahn, G.; Levine, S.; Abbeel, P. Learning deep control policies for autonomous aerial vehicles with MPC-guided policy search. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; Volume 2016, pp. 528–535. [Google Scholar] [CrossRef] [Green Version]
- Fukao, T.; Nakagawa, H.; Adachi, N. Adaptive tracking control of a nonholonomic mobile robot. IEEE Trans. Robot. Autom. 2000, 16, 609–615. [Google Scholar] [CrossRef]
- Goodwin, G.C.; Aguero, J.C.; Cea Garridos, M.E.; Salgado, M.E.; Yuz, J.I. Sampling and sampled-data models: The interface between the continuous world and digital algorithms. IEEE Control Syst. 2013, 33, 34–53. [Google Scholar] [CrossRef]
- Nowzari, C.; Garcia, E.; Cortés, J. Event-triggered communication and control of networked systems for multi-agent consensus. Automatica 2019, 105, 1–27. [Google Scholar] [CrossRef] [Green Version]
- Jiang, Z.P.; Liu, T.F. A survey of recent results in quantized and event-based nonlinear control. Int. J. Autom. Comput. 2015, 12, 455–466. [Google Scholar] [CrossRef] [Green Version]
- Johan Åström, K.; Bernhardsson, B. Comparison of Periodic and Event Based Sampling for First–Order Stochastic Systems. IFAC Proc. Vol. 1999, 32, 5006–5011. [Google Scholar] [CrossRef] [Green Version]
- Tabuada, P. Event-triggered real-time scheduling of stabilizing control tasks. IEEE Trans. Automat. Control 2007, 52, 1680–1685. [Google Scholar] [CrossRef] [Green Version]
- Henningsson, T.; Johannesson, E.; Cervin, A. Sporadic event-based control of first-order linear stochastic systems. Automatica 2008, 44, 2890–2895. [Google Scholar] [CrossRef]
- Zietkiewicz, J.; Horla, D.; Owczarkowski, A. Sparse in the time stabilization of a bicycle robot model: Strategies for event- and self-triggered control approaches. Robotics 2018, 7, 77. [Google Scholar] [CrossRef] [Green Version]
- González, A.; Cuenca, Á.; Salt, J.; Jacobs, J. Robust stability analysis of an energy-efficient control in a Networked Control System with application to unmanned ground vehicles. Inf. Sci. 2021, 578, 64–84. [Google Scholar] [CrossRef]
- Du, S.; Yan, Q.; Qiao, J. Event-triggered PID control for wastewater treatment plants. J. Water Process Eng. 2020, 38, 101659. [Google Scholar] [CrossRef]
- Wu, J.; Peng, C. Observer-based adaptive event-triggered PID control for networked systems under aperiodic DoS attacks. Int. J. Robust Nonlinear Control 2022, 32, 2536–2550. [Google Scholar] [CrossRef]
- Heemels, W.P.M.H.; Sandee, J.H.; Van Den Bosch, P.P.J. Analysis of event-driven controllers for linear systems. Int. J. Control 2008, 81, 571–590. [Google Scholar] [CrossRef]
- Wang, X.; Lemmon, M.D. Event-triggering in distributed networked control systems. IEEE Trans. Automat. Control 2011, 56, 586–601. [Google Scholar] [CrossRef] [Green Version]
- Heemels, W.P.M.H.; Donkers, M.C.F.; Teel, A.R. Periodic event-triggered control for linear systems. IEEE Trans. Automat. Control 2013, 58, 847–861. [Google Scholar] [CrossRef]
- Singh, P.; Agrawal, P.; Nandanwar, A.; Behera, L.; Verma, N.K.; Nahavandi, S.; Jamshidi, M. Multivariable Event-Triggered Generalized Super-Twisting Controller for Safe Navigation of Nonholonomic Mobile Robot. IEEE Syst. J. 2021, 15, 454–465. [Google Scholar] [CrossRef]
- Yan, Y.; Yu, S.; Sun, C. Event-triggered sliding mode tracking control of autonomous surface vehicles. J. Franklin Inst. 2021, 358, 4393–4409. [Google Scholar] [CrossRef]
- Nafia, N.; El Kari, A.; Ayad, H.; Mjahed, M. Robust interval type-2 fuzzy sliding mode control design for robot manipulators. Robotics 2018, 7, 40. [Google Scholar] [CrossRef] [Green Version]
- Hu, Y.; Su, H.; Zhang, L.; Miao, S.; Chen, G.; Knoll, A. Nonlinear model predictive control for mobile robot using varying-parameter convergent differential neural network. Robotics 2019, 8, 64. [Google Scholar] [CrossRef] [Green Version]
- Bozek, P.; Karavaev, Y.L.; Ardentov, A.A.; Yefremov, K.S. Neural network control of a wheeled mobile robot based on optimal trajectories. Int. J. Adv. Robot. Syst. 2020, 17, 1729881420916077. [Google Scholar] [CrossRef] [Green Version]
- Zou, A.M.; Hou, Z.G.; Fu, S.Y.; Tan, M. Neural networks for mobile robot navigation: A survey. Lect. Notes Comput. Sci. 2006, 3972, 1218–1226. [Google Scholar] [CrossRef]
- Kaaniche, K.; Rashid, N.; Miraoui, I.; Mekki, H.; El-Hamrawy, O.I. Mobile Robot Control Based on 2D Visual Servoing: A New Approach Combining Neural Network with Variable Structure and Flatness Theory. IEEE Access 2021, 9, 83688–83694. [Google Scholar] [CrossRef]
- Oryschuk, P.; Salerno, A.; Al-Husseini, A.M.; Angeles, J. Experimental validation of an underactuated two-wheeled mobile robot. IEEE/ASME Trans. Mechatron. 2009, 14, 252–257. [Google Scholar] [CrossRef]
- Lang, H.; Wang, Y.; De Silva, C.W. Visual servoing with LQR control for mobile robots. In Proceedings of the 2010 8th IEEE International Conference on Control and Automation, Xiamen, China, 9–11 June 2010; pp. 317–321. [Google Scholar] [CrossRef]
- Duong, V.T.; Nguyen, D.T.; Luu, Q.L.; Nguyen, T.T.; Nguyen, H.H.; Nguyen, T.T. Indoor Virtual Path Tracking for Mobile Robot using Sensor Fusion by Extended Kalman Filter. Int. J. Mech. Mechatron. Eng. 2020, 20, 104–110. [Google Scholar]
- Nath, K.; Yesmin, A.; Nanda, A.; Bera, M.K. Event-Triggered Sliding-Mode Control of Two Wheeled Mobile Robot: An Experimental Validation. IEEE J. Emerg. Sel. Top. Ind. Electron. 2021, 2, 218–226. [Google Scholar] [CrossRef]
- Van, M.; Mavrovouniotis, M.; Ge, S.S. An adaptive backstepping nonsingular fast terminal sliding mode control for robust fault tolerant control of robot manipulators. IEEE Trans. Syst. Man Cybern. Syst. 2019, 49, 1448–1458. [Google Scholar] [CrossRef] [Green Version]
- Chen, H.; Zhang, B.; Zhao, T.; Wang, T.; Li, K. Finite-time tracking control for extended nonholonomic chained-form systems with parametric uncertainty and external disturbance. J. Vib. Control 2018, 24, 100–109. [Google Scholar] [CrossRef] [Green Version]
- Mu, J.; Yan, X.G.; Spurgeon, S.K.; Mao, Z. Generalized Regular Form Based SMC for Nonlinear Systems with Application to a WMR. IEEE Trans. Ind. Electron. 2017, 64, 6714–6723. [Google Scholar] [CrossRef] [Green Version]
- Yu, H.; Chen, T. On Zeno Behavior in Event-Triggered Finite-Time Consensus of Multiagent Systems. IEEE Trans. Automat. Control 2021, 66, 4700–4714. [Google Scholar] [CrossRef]
- Xing, L.; Wen, C.; Liu, Z.; Su, H.; Cai, J. Event-triggered adaptive control for a class of uncertain nonlinear systems. IEEE Trans. Automat. Control 2017, 62, 2071–2076. [Google Scholar] [CrossRef]
- Huang, J.; Wang, W.; Wen, C.; Li, G. Adaptive Event-Triggered Control of Nonlinear Systems with Controller and Parameter Estimator Triggering. IEEE Trans. Automat. Control 2020, 65, 318–324. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value | Parameters | Value |
|---|---|---|---|
| Sampling time | |||
| Initial value of | |||
| Initial value of | |||
| Dimensions (L × W × H) (mm) | |
| Total weight | |
| Maximum load capacity | |
| Maximum velocity | |
| Maximum acceleration | |
| Main actuators | PITTMAN GM9236 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tran, T.D.; Nguyen, T.T.; Duong, V.T.; Nguyen, H.H.; Nguyen, T.T. Parameter-Adaptive Event-Triggered Sliding Mode Control for a Mobile Robot. Robotics 2022, 11, 78. https://doi.org/10.3390/robotics11040078
Tran TD, Nguyen TT, Duong VT, Nguyen HH, Nguyen TT. Parameter-Adaptive Event-Triggered Sliding Mode Control for a Mobile Robot. Robotics. 2022; 11(4):78. https://doi.org/10.3390/robotics11040078
Chicago/Turabian StyleTran, Tri Duc, Trong Trung Nguyen, Van Tu Duong, Huy Hung Nguyen, and Tan Tien Nguyen. 2022. "Parameter-Adaptive Event-Triggered Sliding Mode Control for a Mobile Robot" Robotics 11, no. 4: 78. https://doi.org/10.3390/robotics11040078
APA StyleTran, T. D., Nguyen, T. T., Duong, V. T., Nguyen, H. H., & Nguyen, T. T. (2022). Parameter-Adaptive Event-Triggered Sliding Mode Control for a Mobile Robot. Robotics, 11(4), 78. https://doi.org/10.3390/robotics11040078