Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle




Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Original Contributions of This Paper
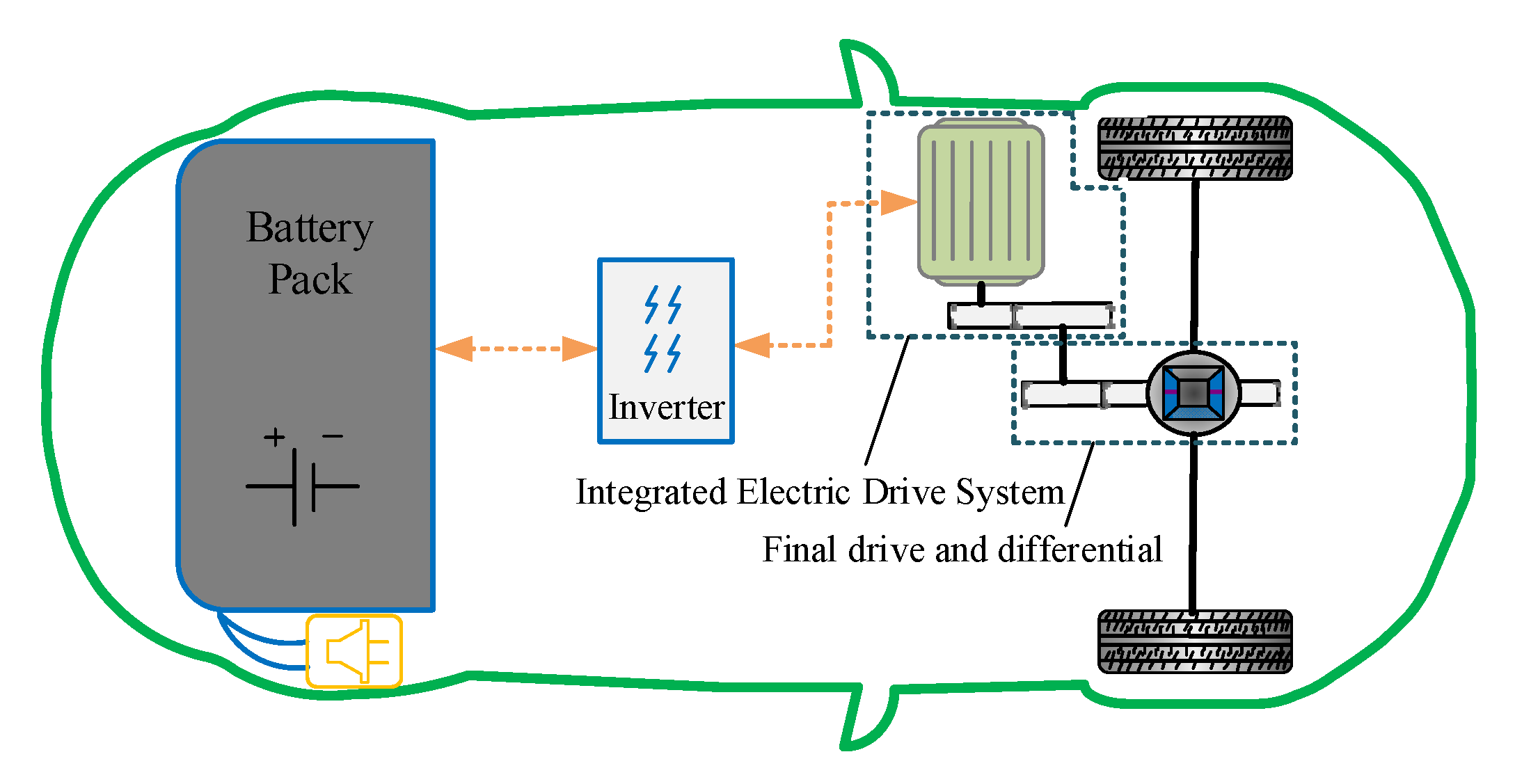
2. Dynamics Modeling of PEV Equipped with IEDS
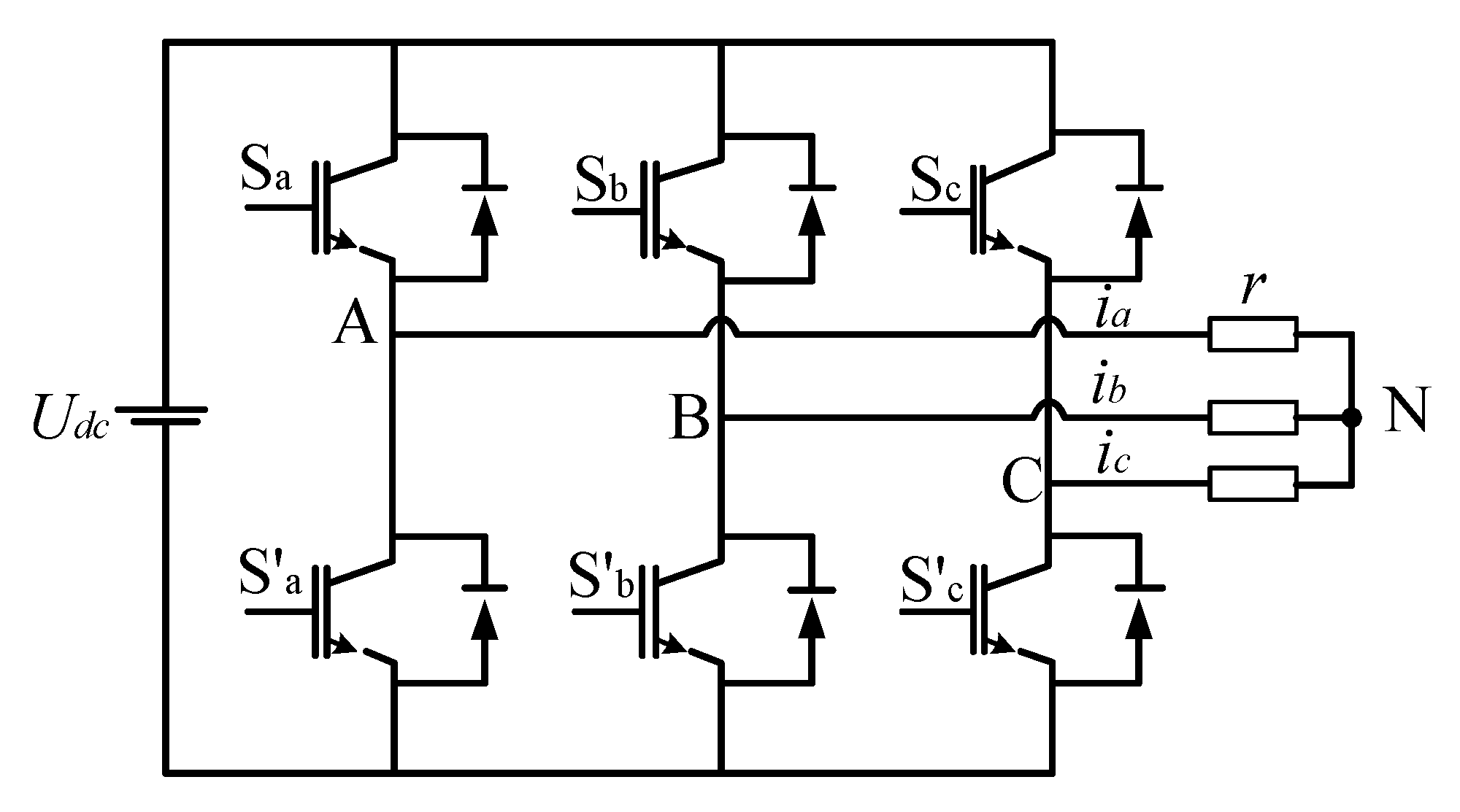
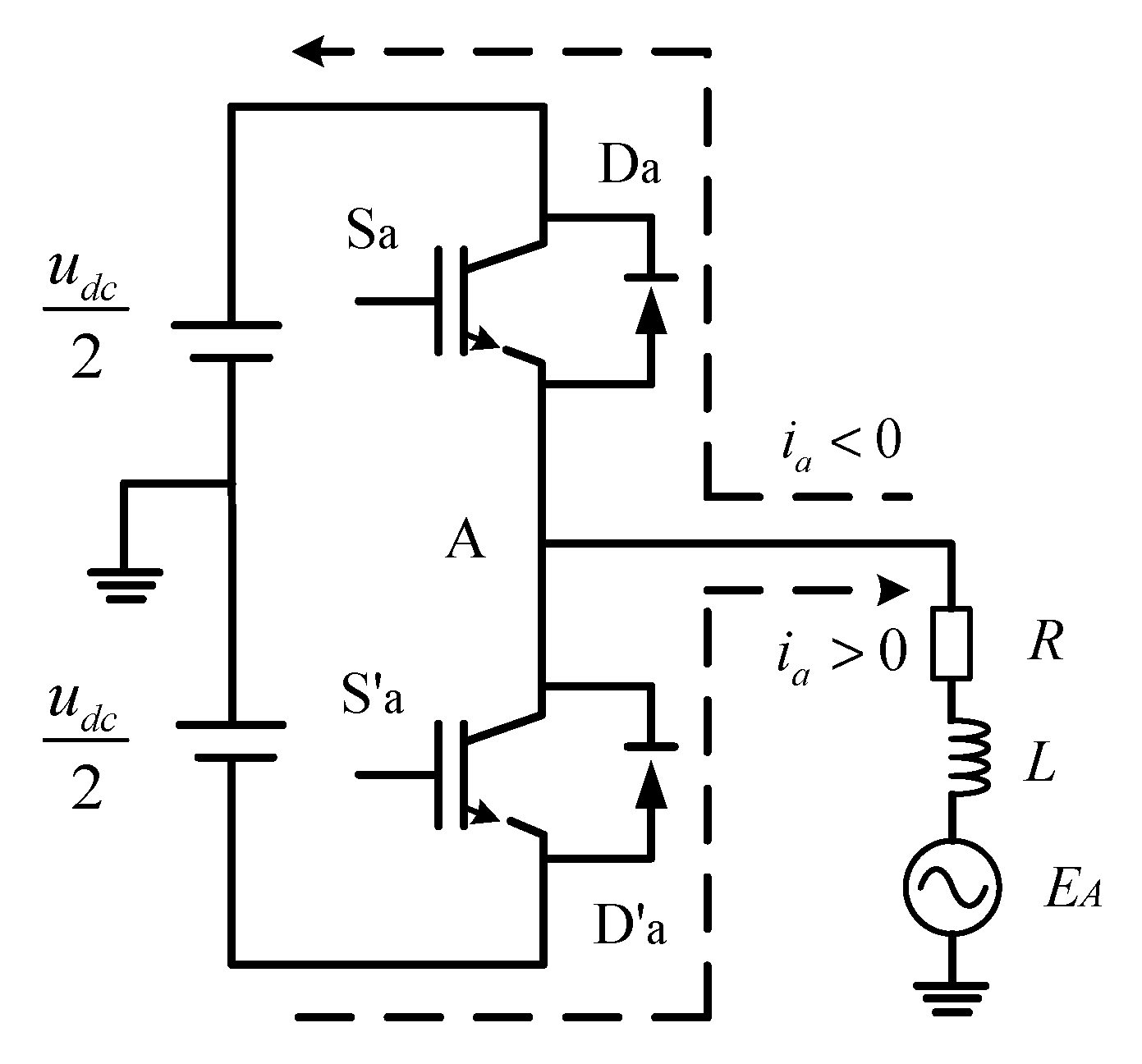
2.1. Harmonic Torque Mathematical Model of PMSM
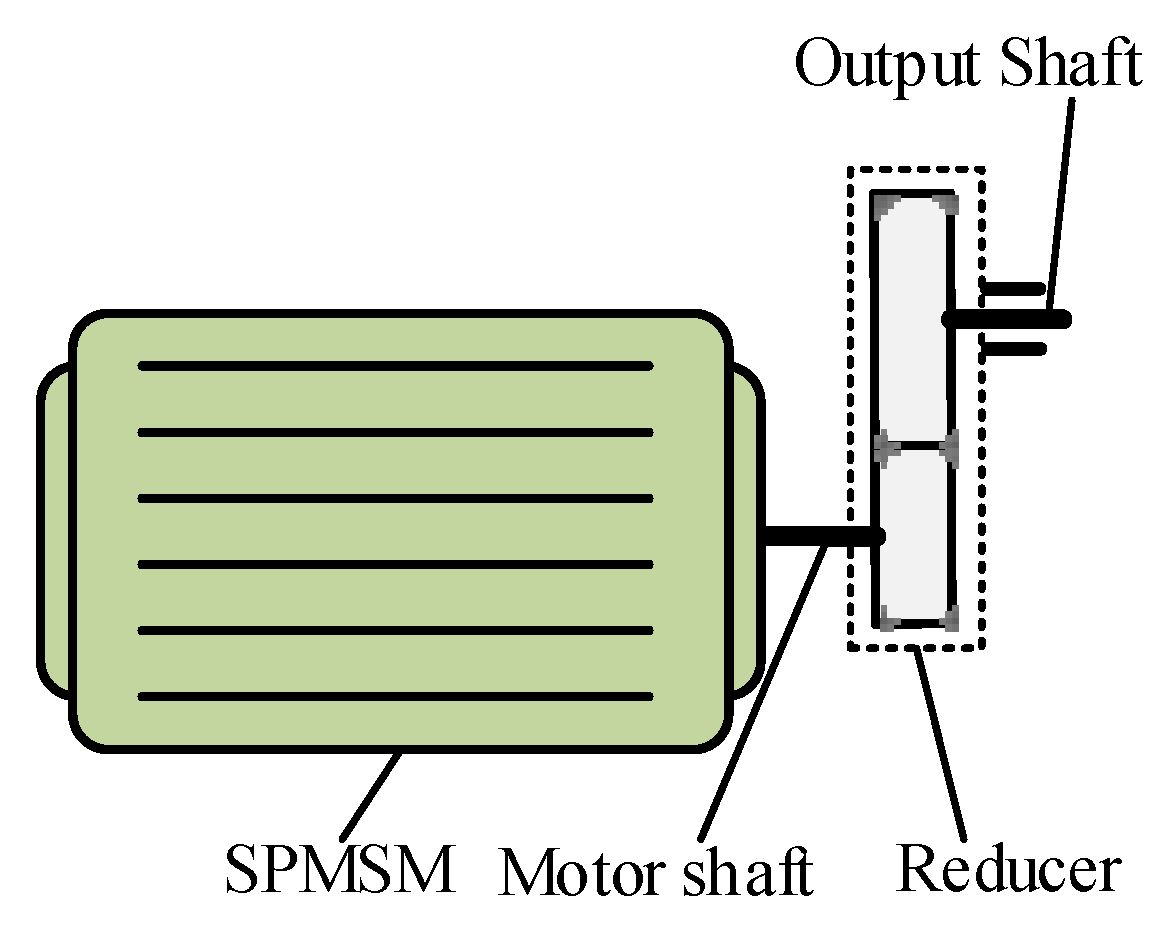
2.2. Transmission System Model of IEDS
2.3. Vehicle Powertrain Model
3. Research on Electromechanical Coupling Characteristics of IEDS
4. Harmonic Torque Reduction Strategy for IEDS
4.1. Design of Harmonic Torque Reduction Strategy
4.2. Simulation Analysis of Harmonic Torque Reduction Control Strategy Effectiveness
5. Conclusions
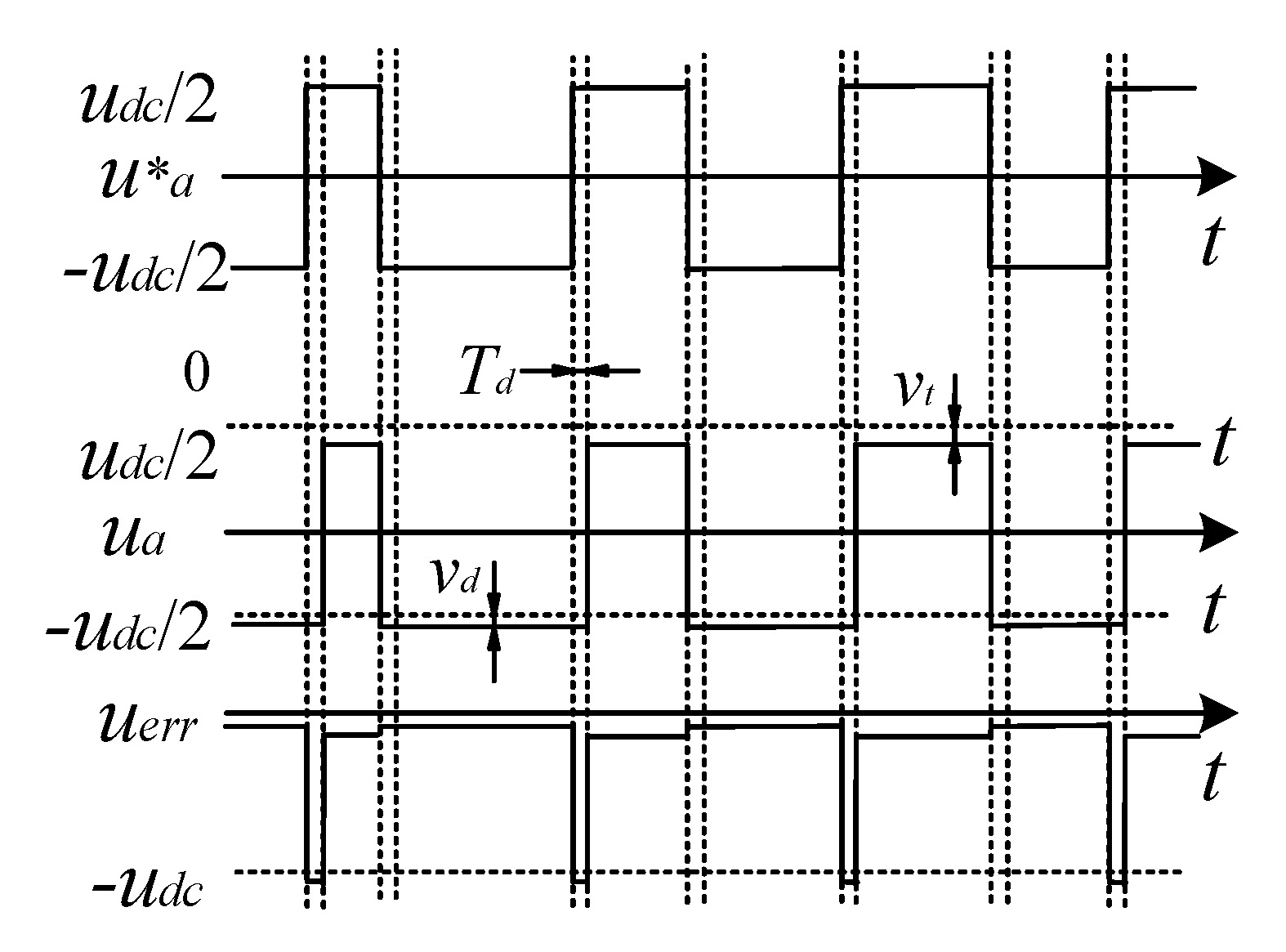
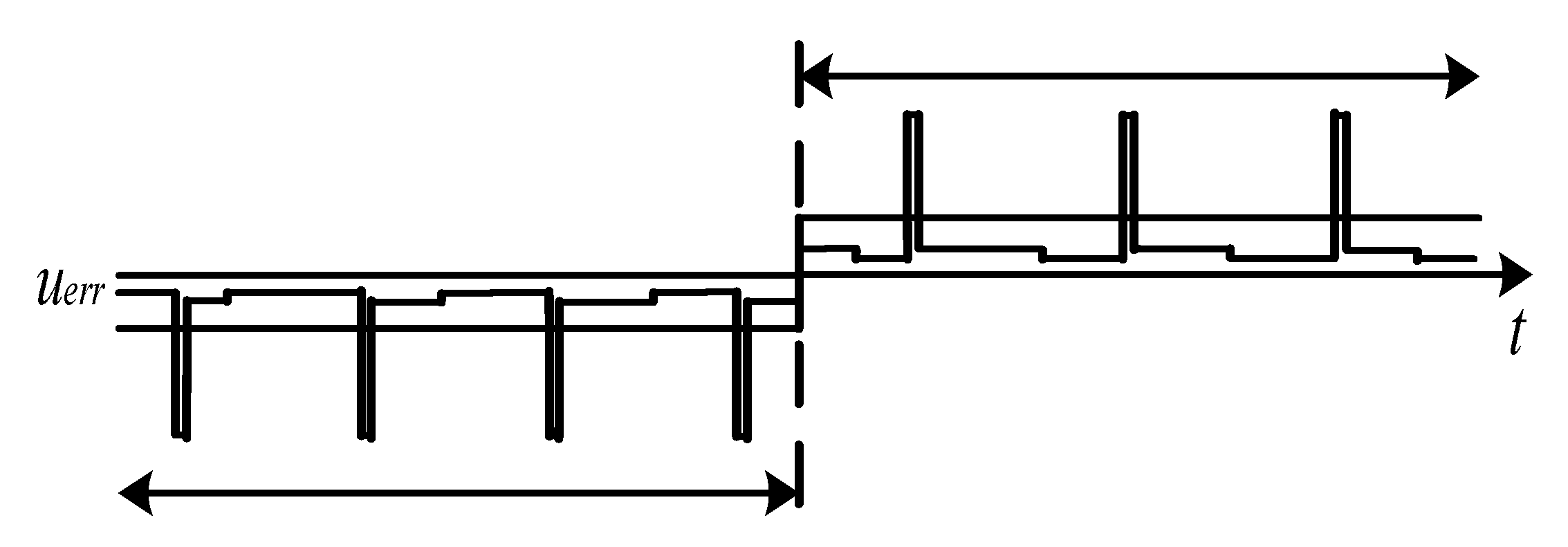
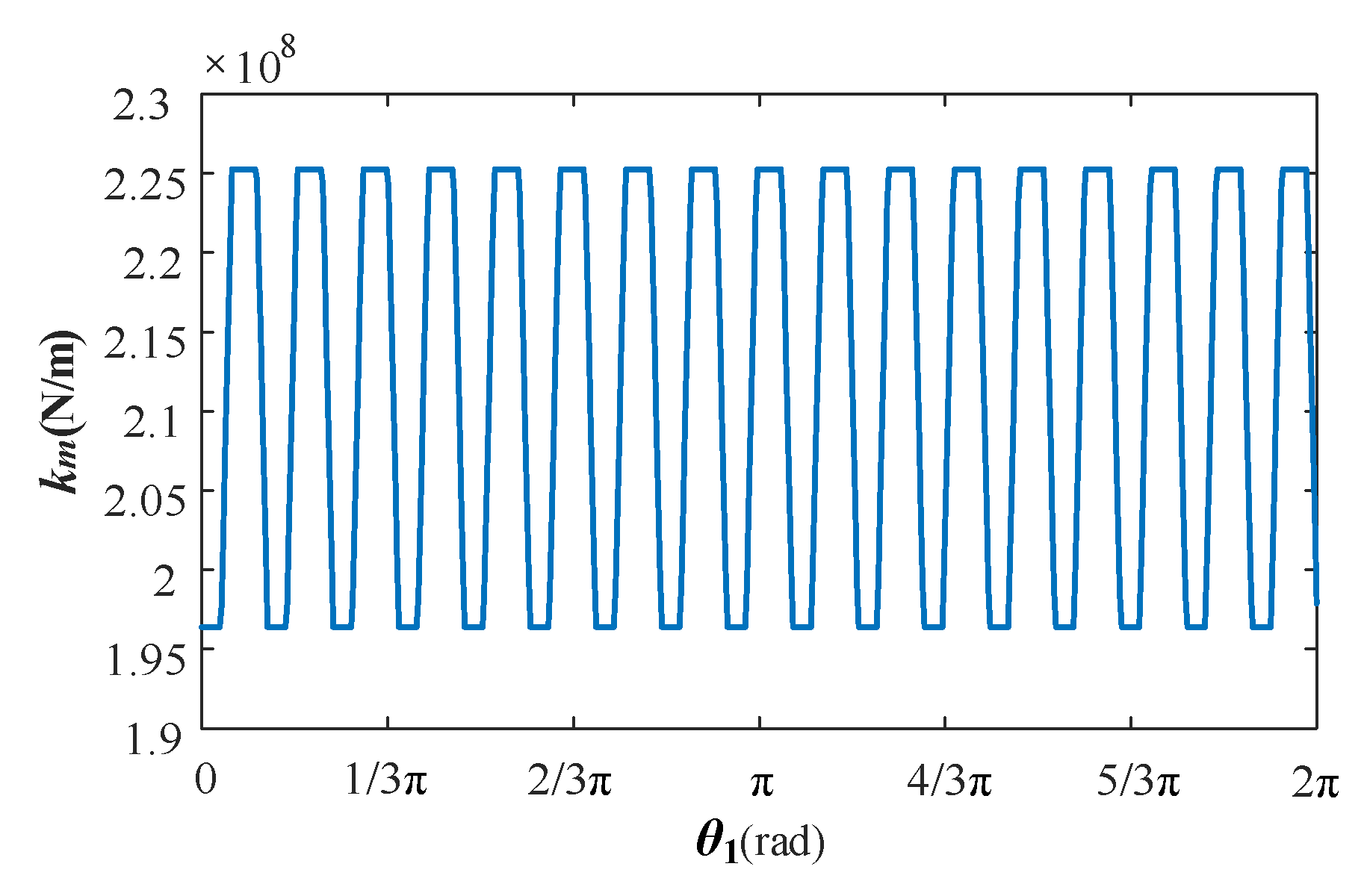
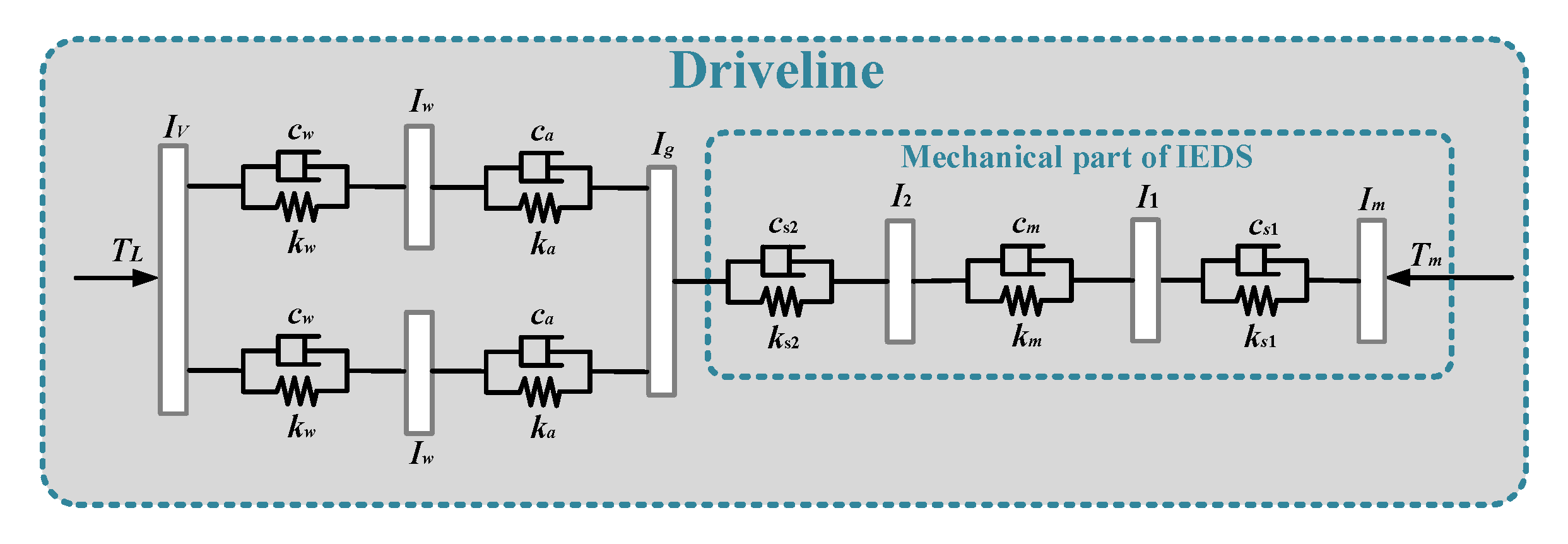
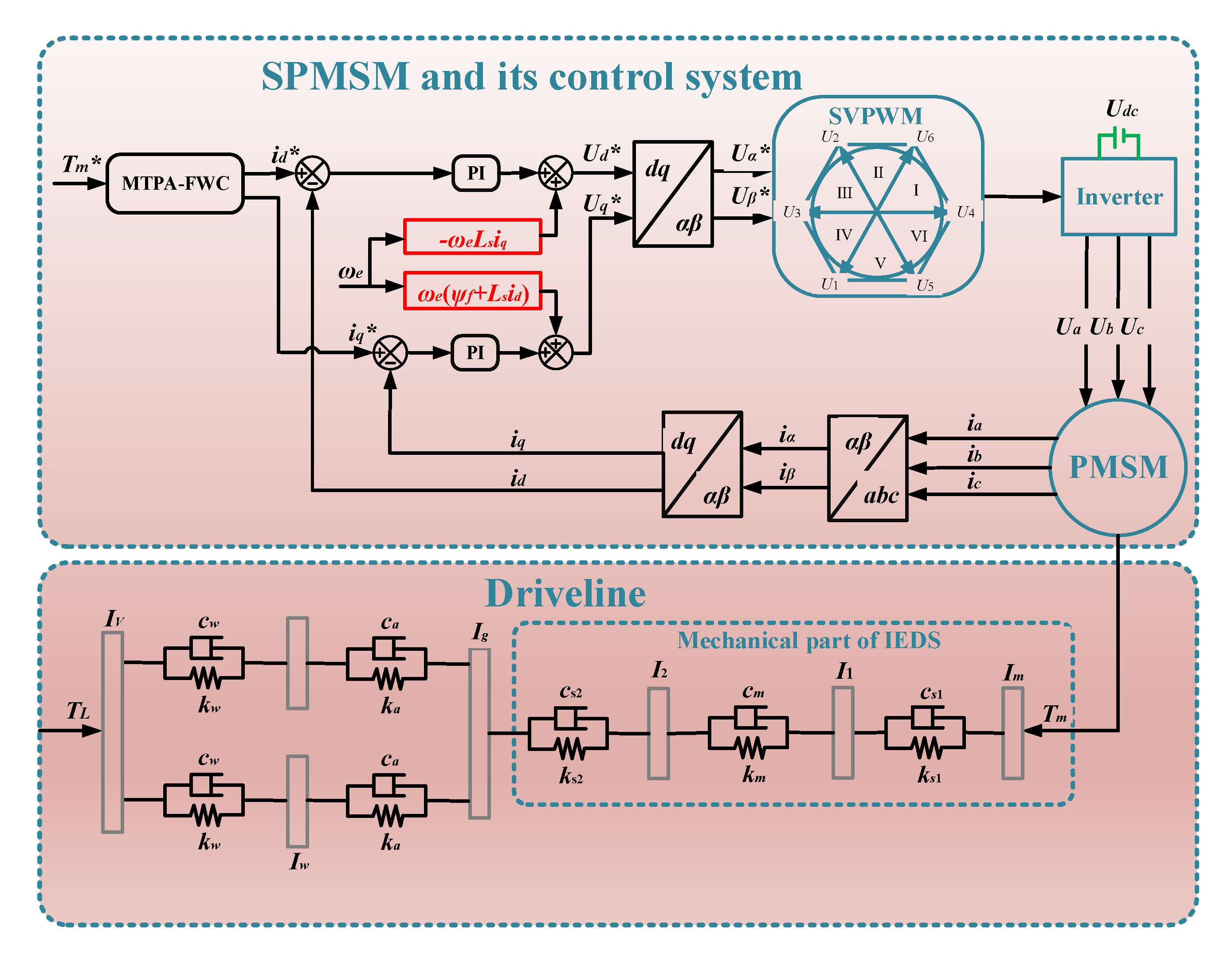
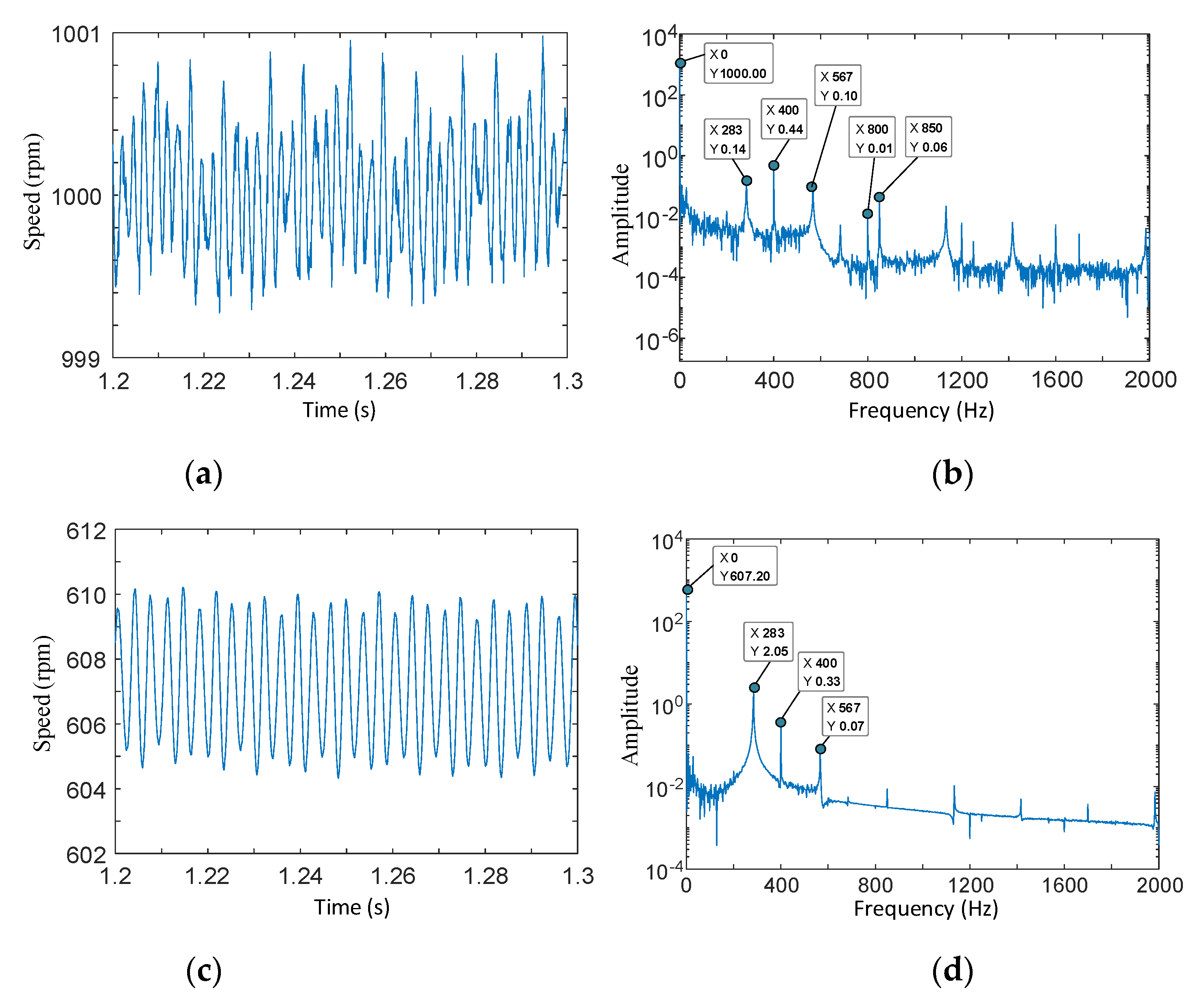
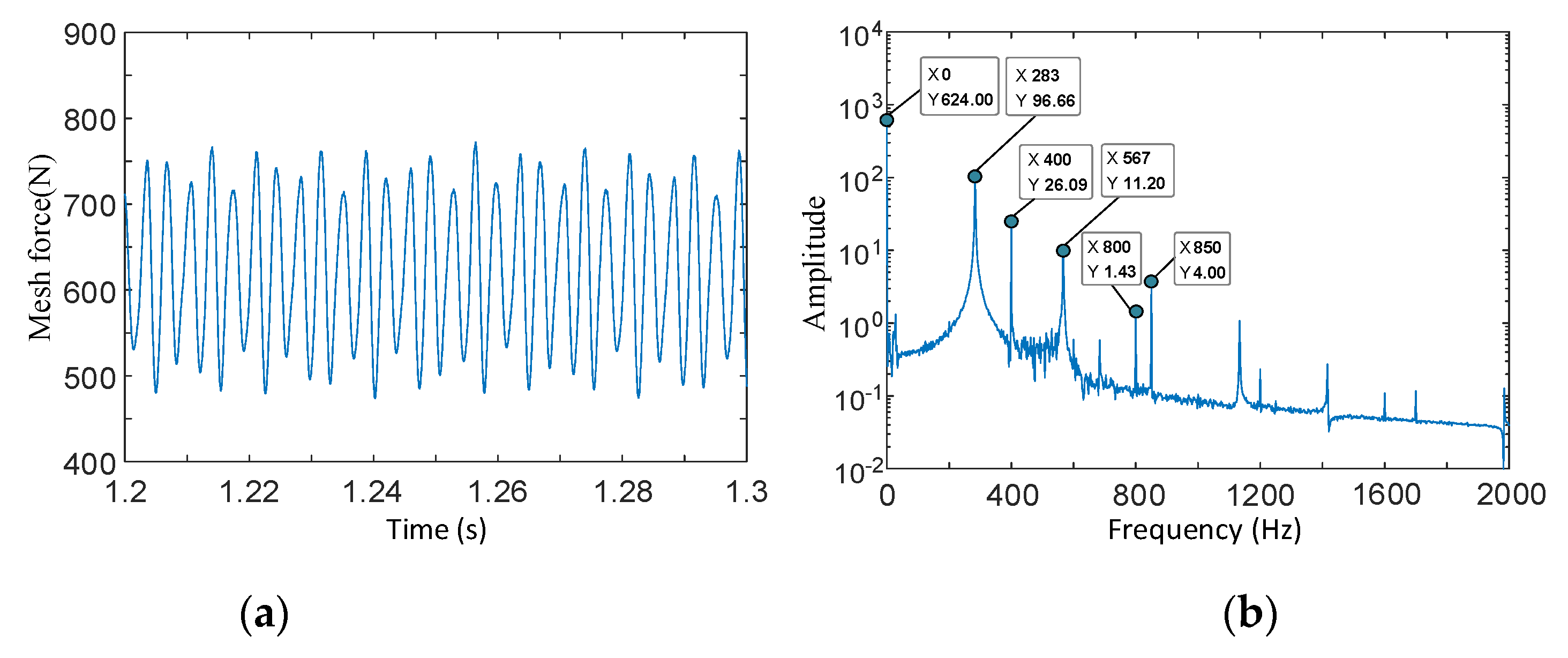
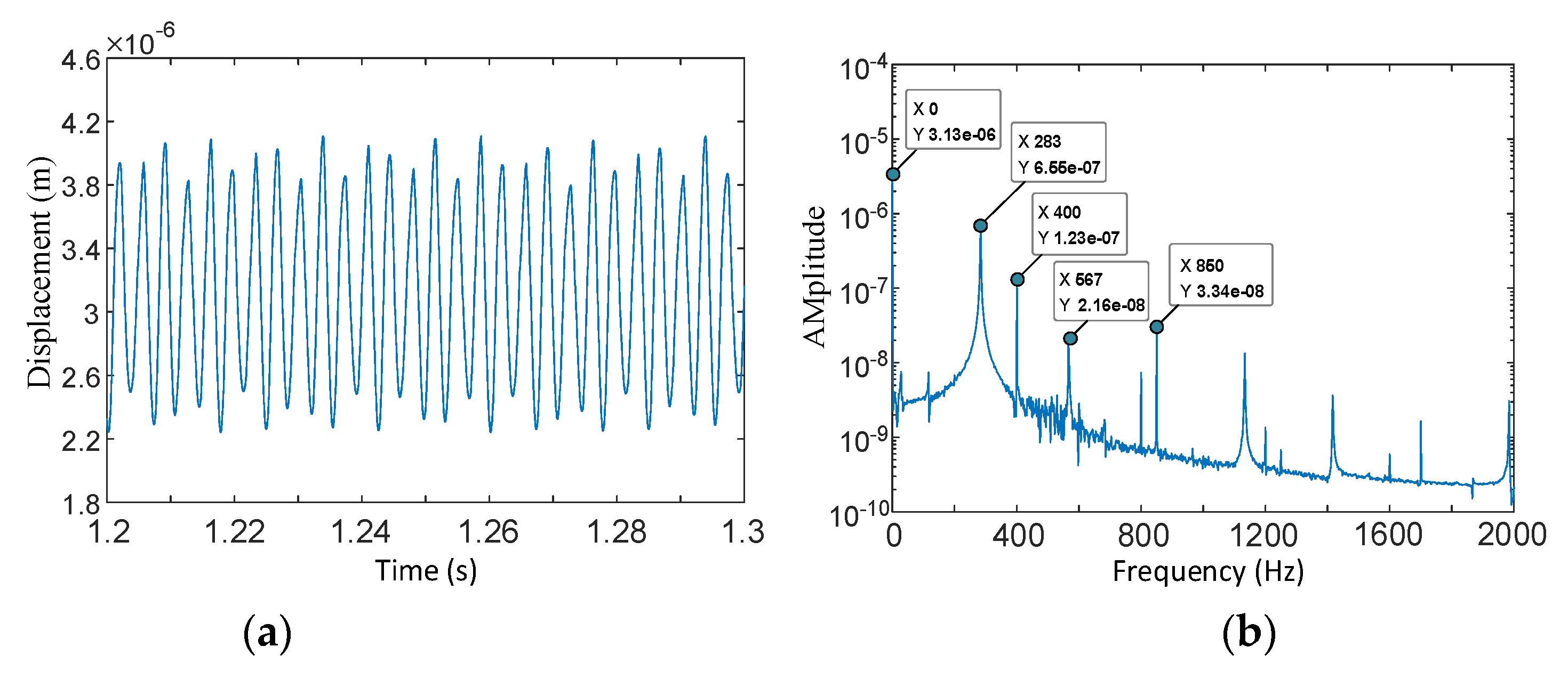
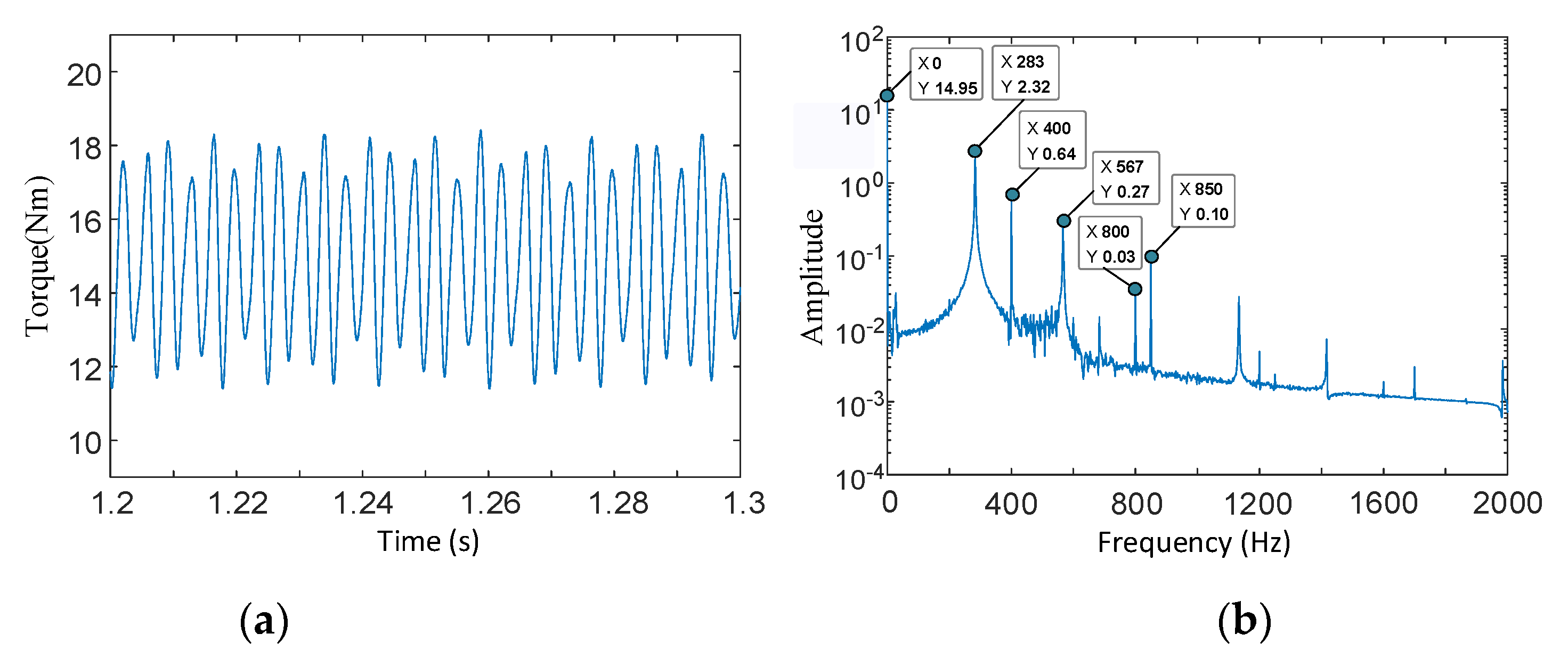
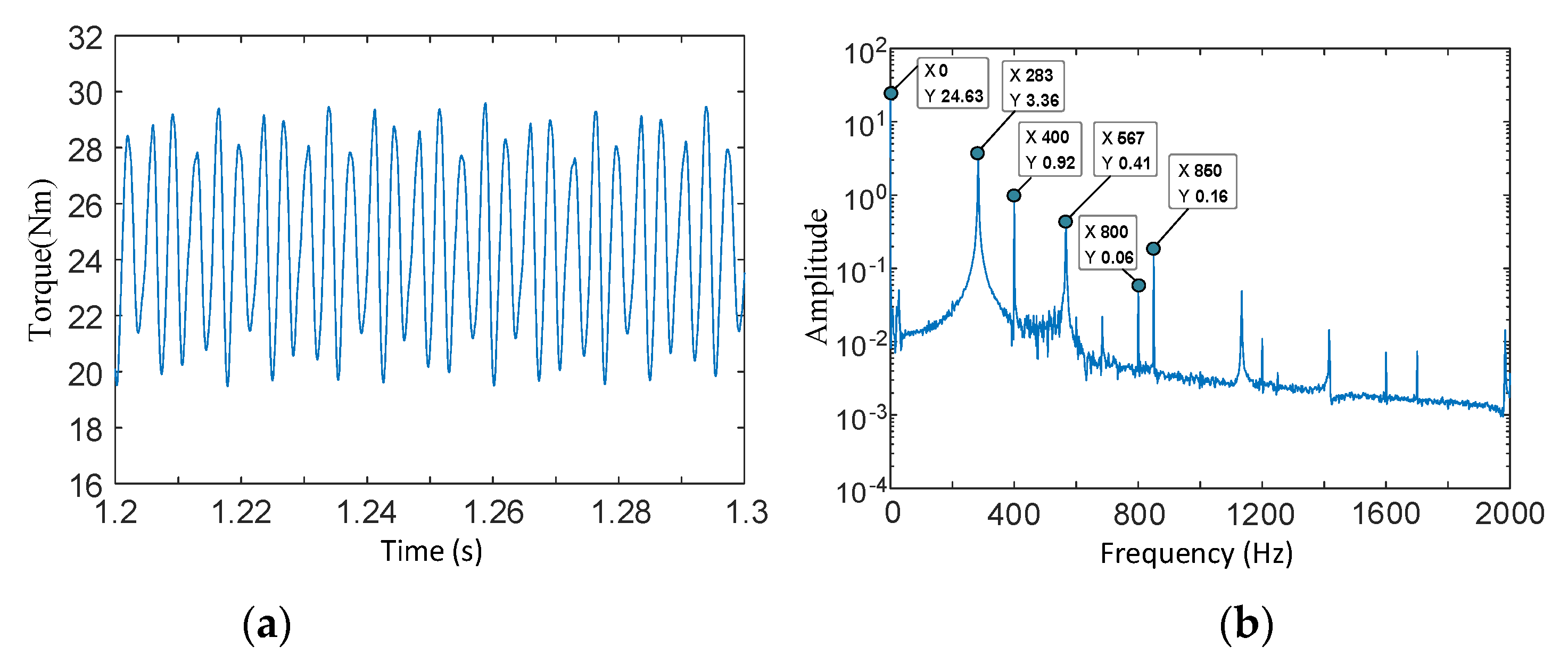
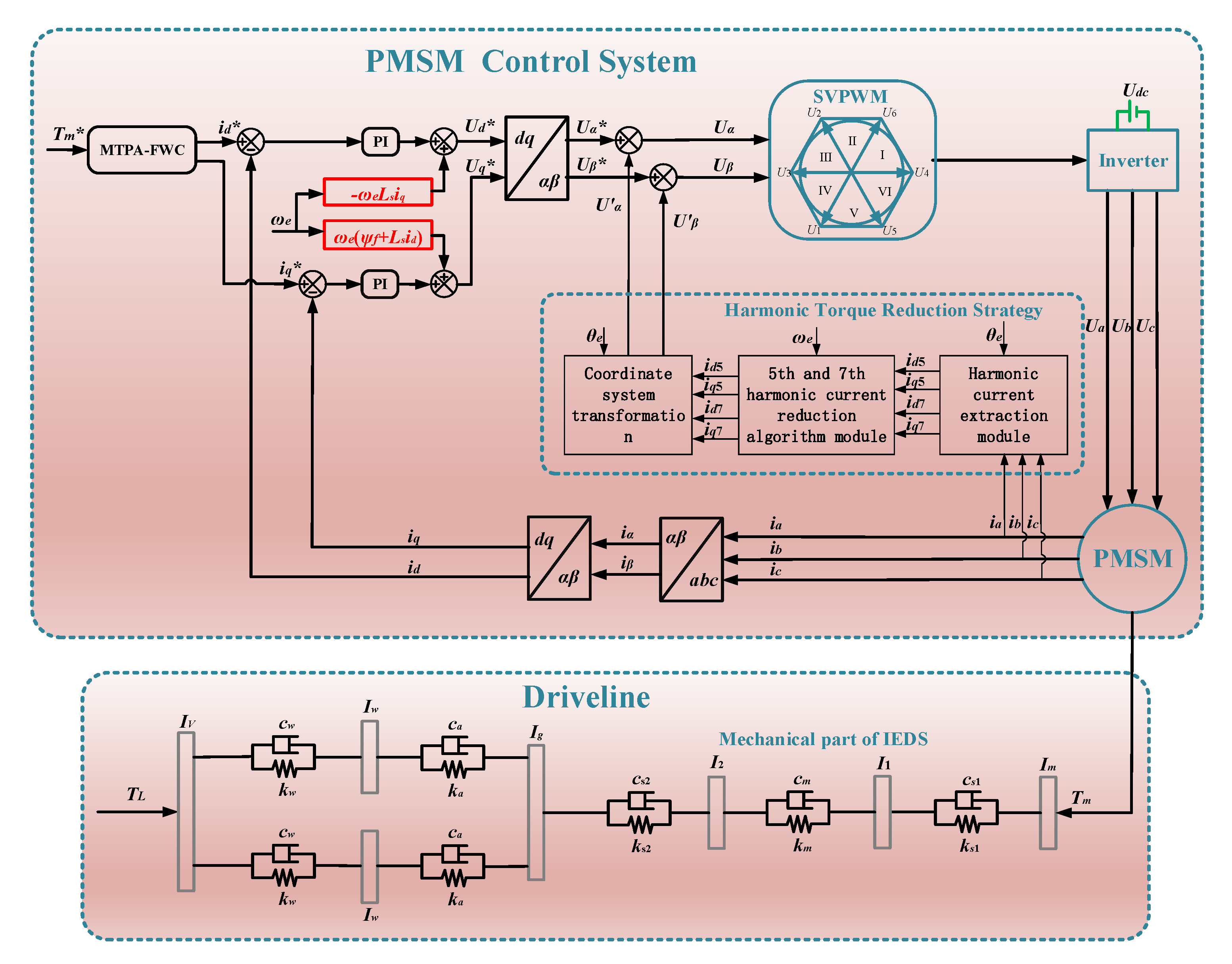
- The electrical system and mechanical system of the IEDS will interact with each other. Mechanical nonlinear factors such as time-varying meshing stiffness and the meshing error of the gears can lead to a speed fluctuation of the motor shaft. Meanwhile, the dead-time effect and voltage drop effect of the inverter will cause the 6th harmonic torque and 12th harmonic torque of the motor, which will increase the dynamic load of the mechanical system. When designing an IEDS, the gear meshing frequency of the reducer should not be equal to 6 times that of the electric angular frequency of the motor, namely . In order to avoid that when the 6th harmonic torque of the motor is always consistent with the gear meshing frequency, the superposition may lead to a more serious speed fluctuation of the system, resulting in a greater dynamic load amplitude of the mechanical system and reducing the service life of the mechanical system.
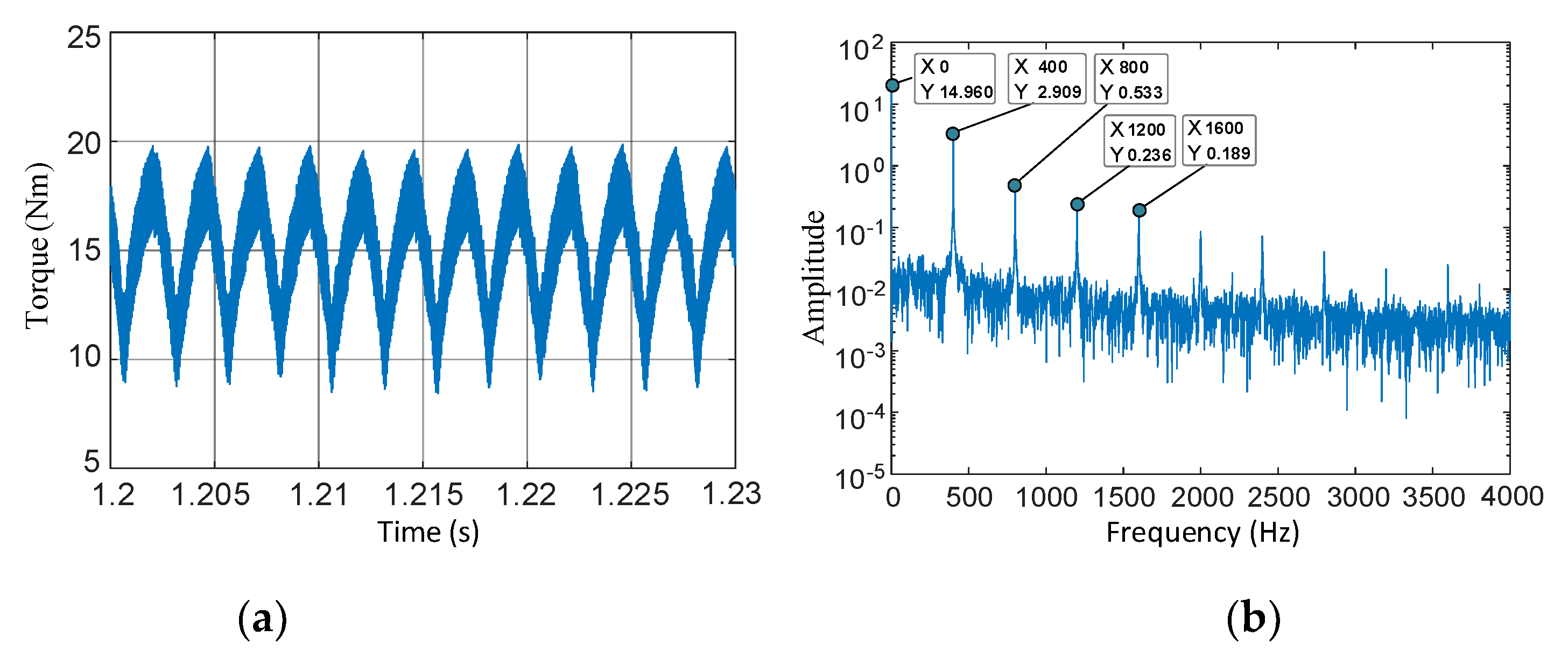
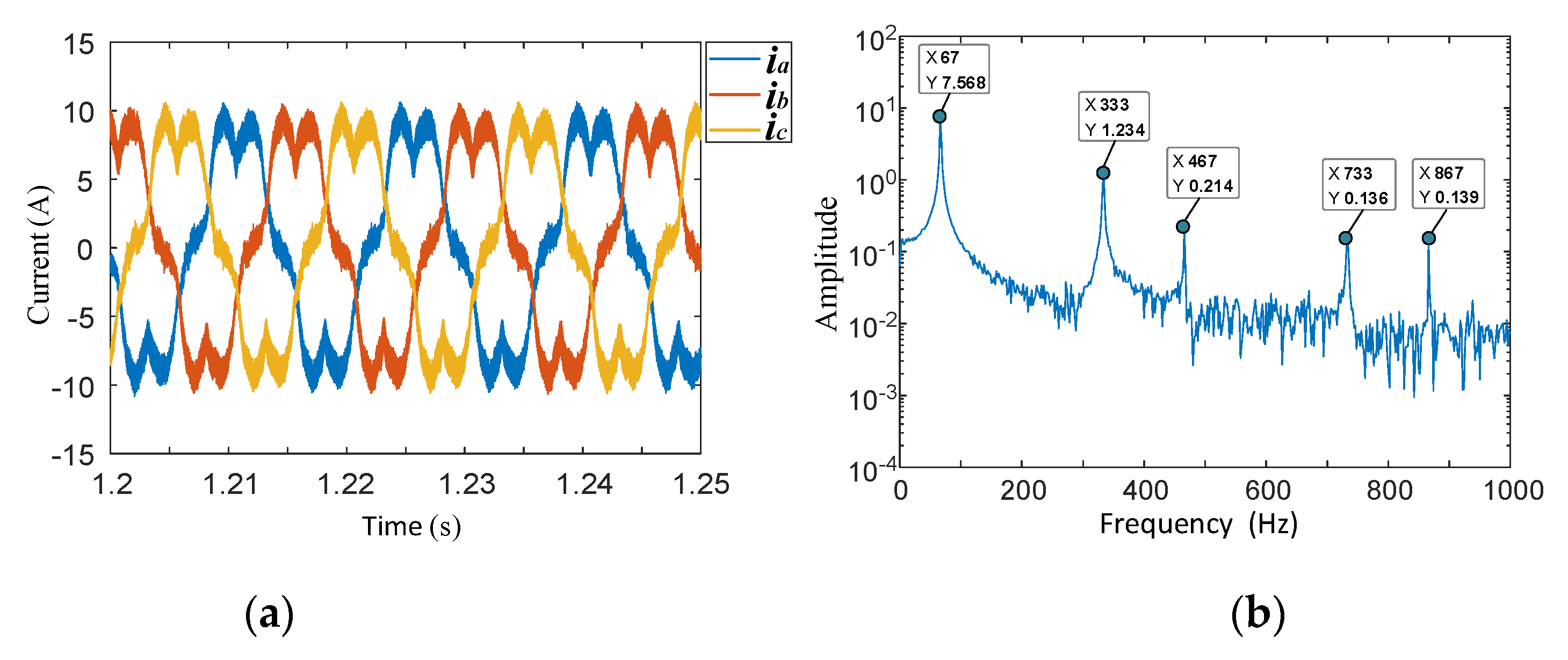
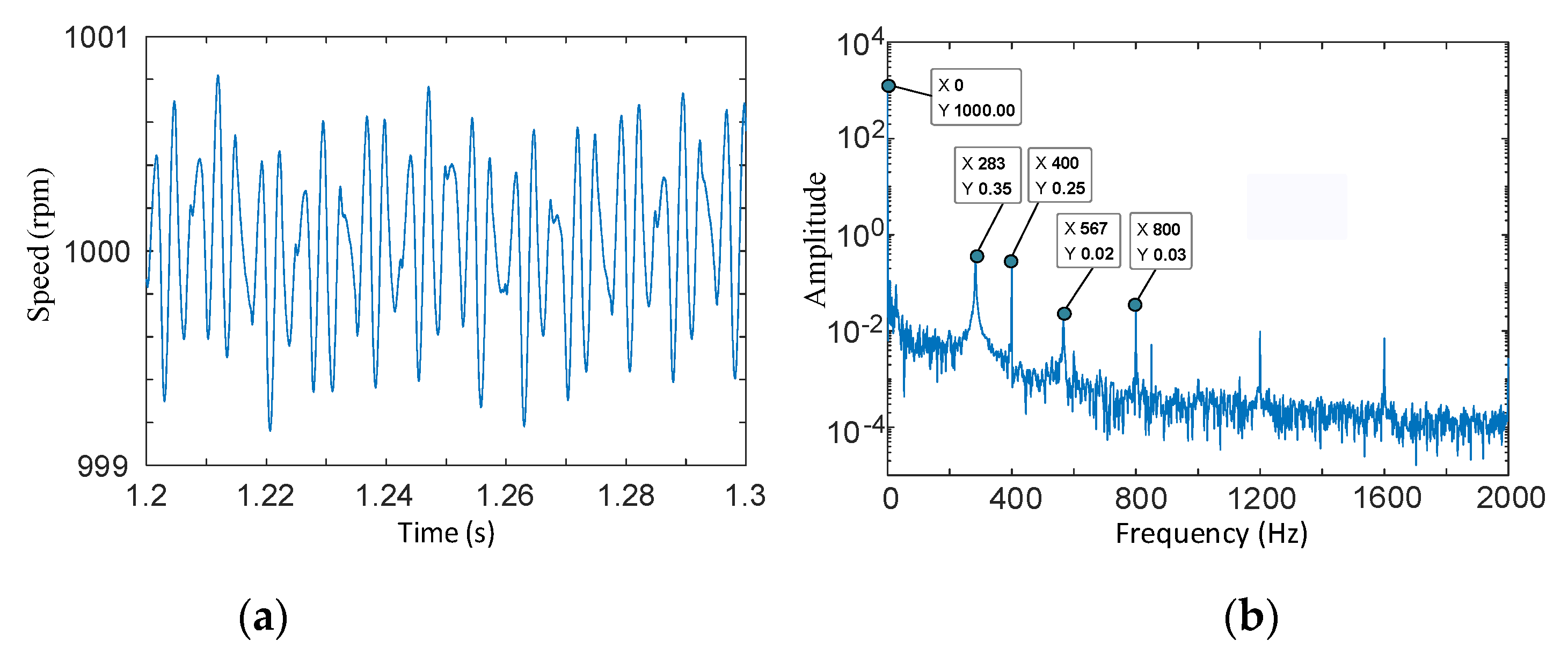
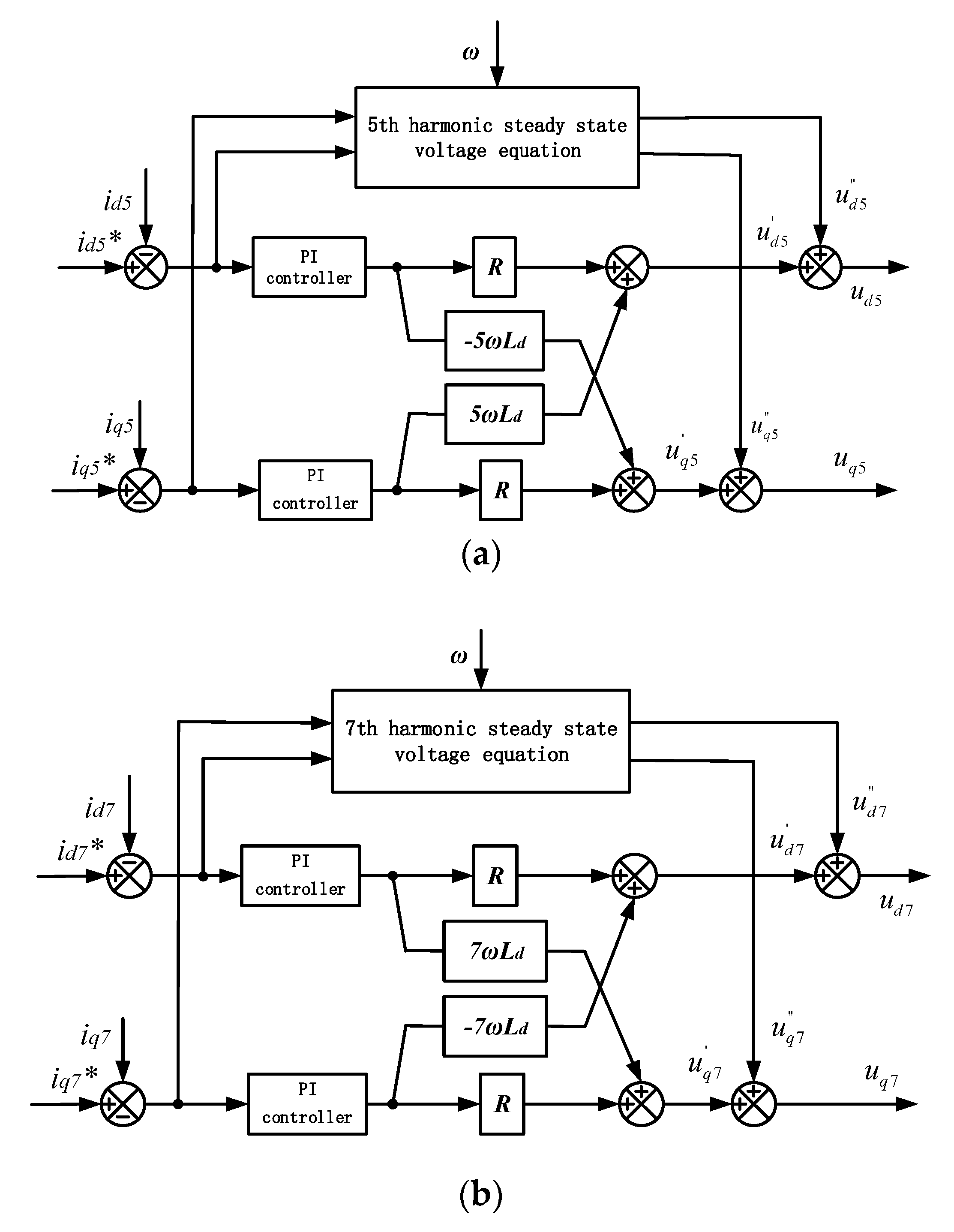
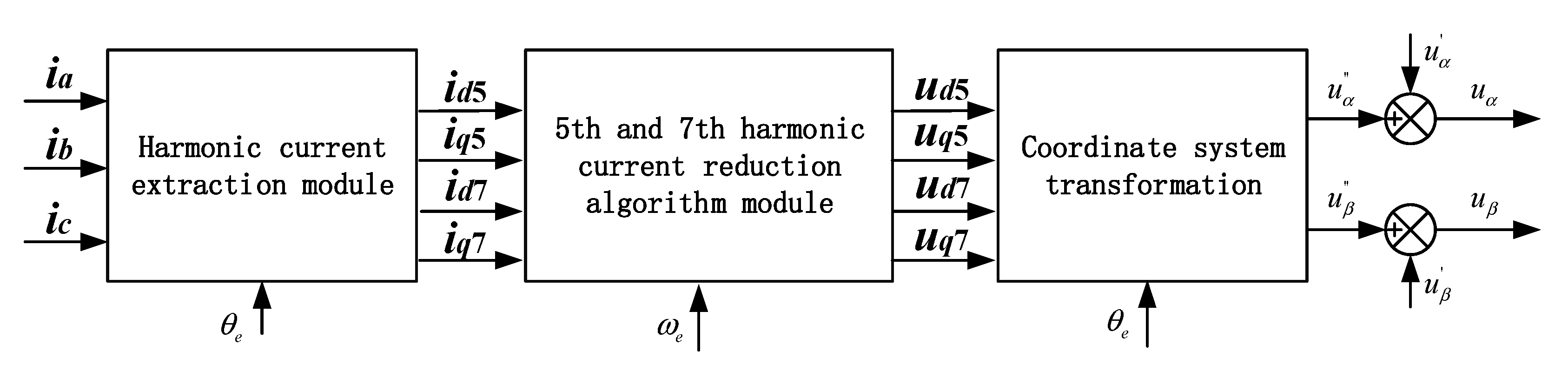
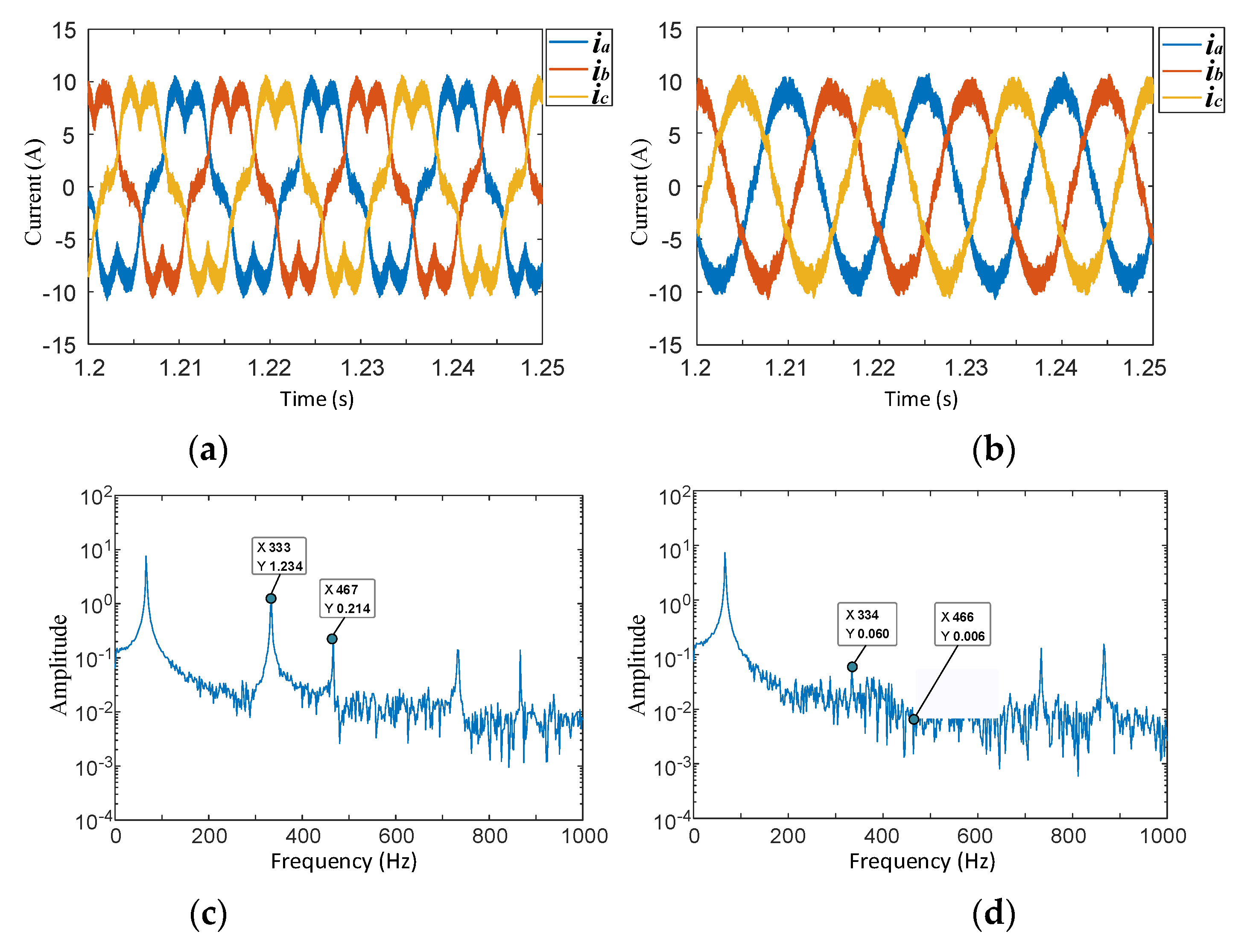
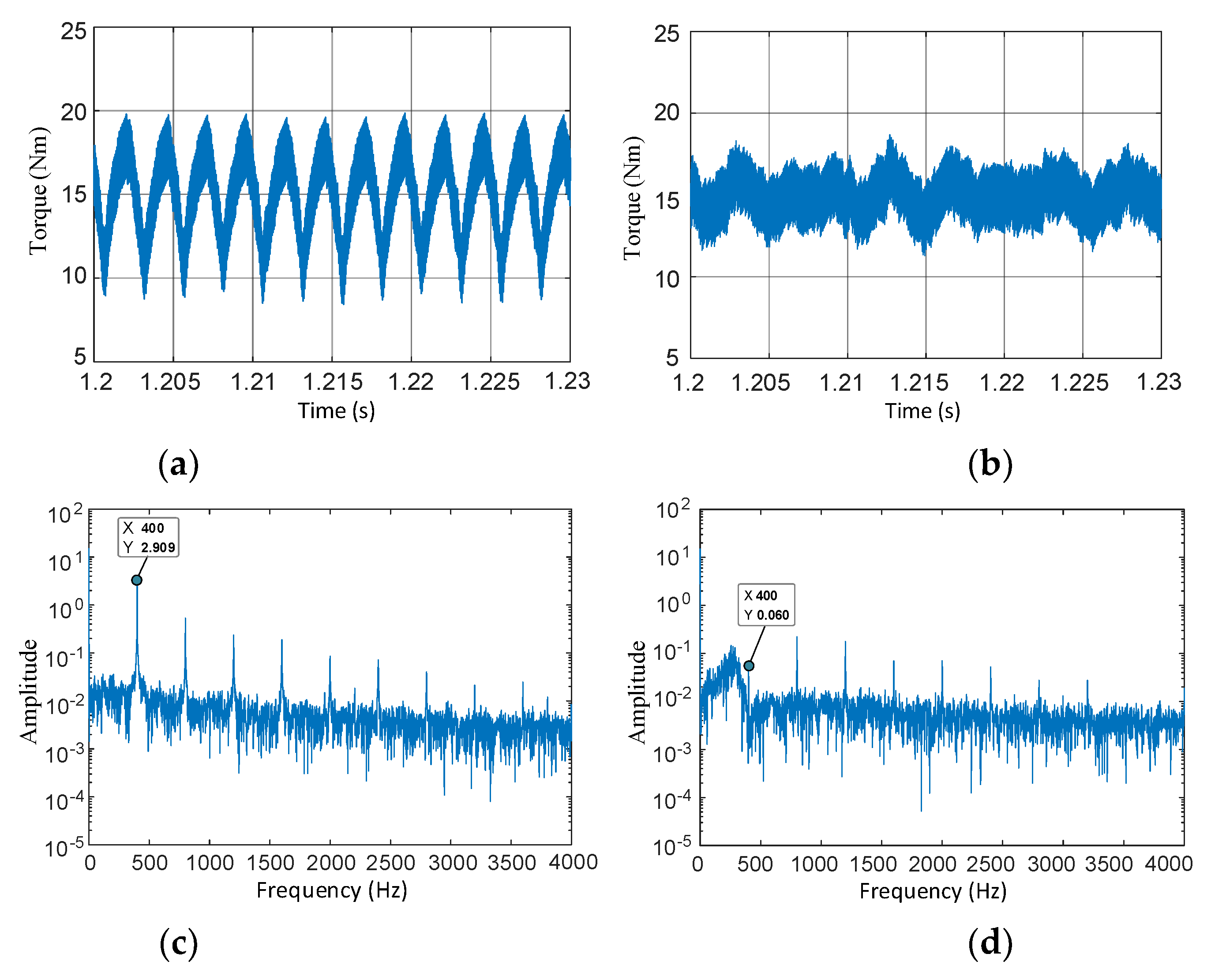
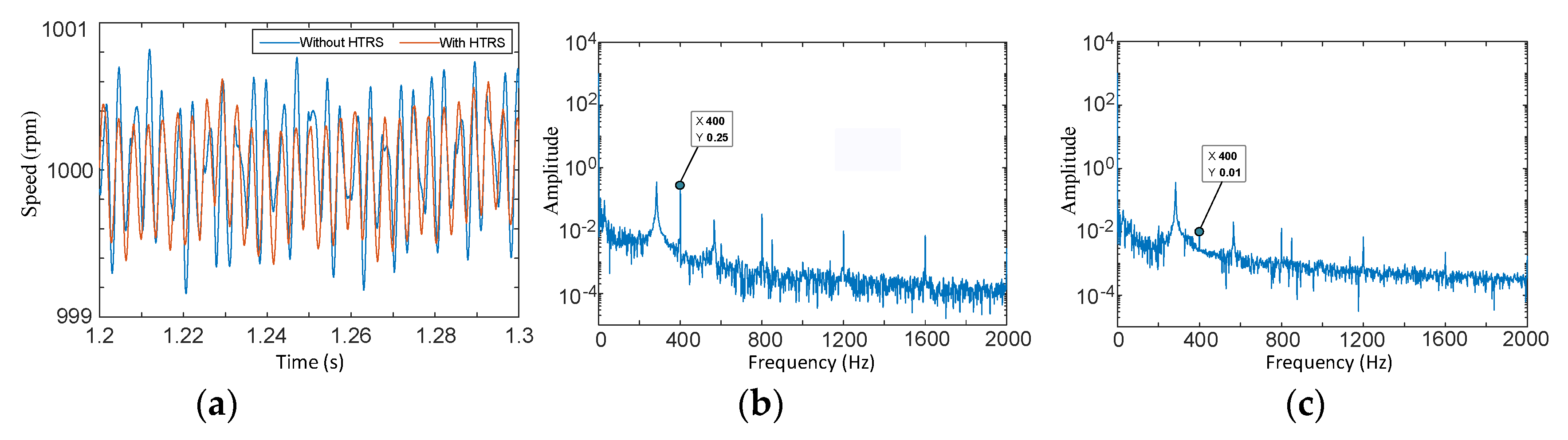
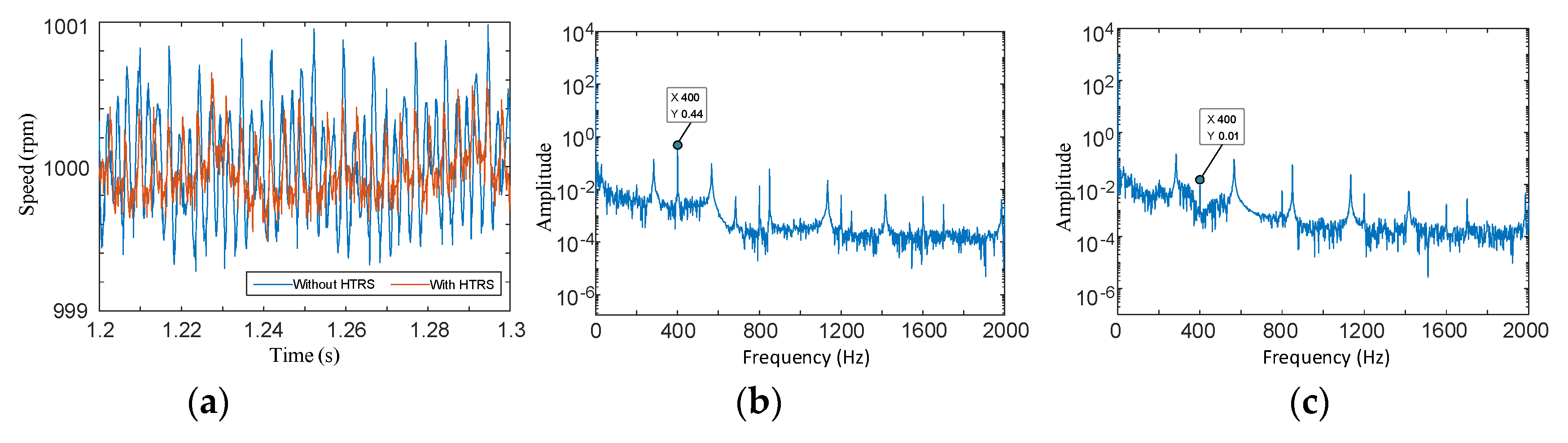
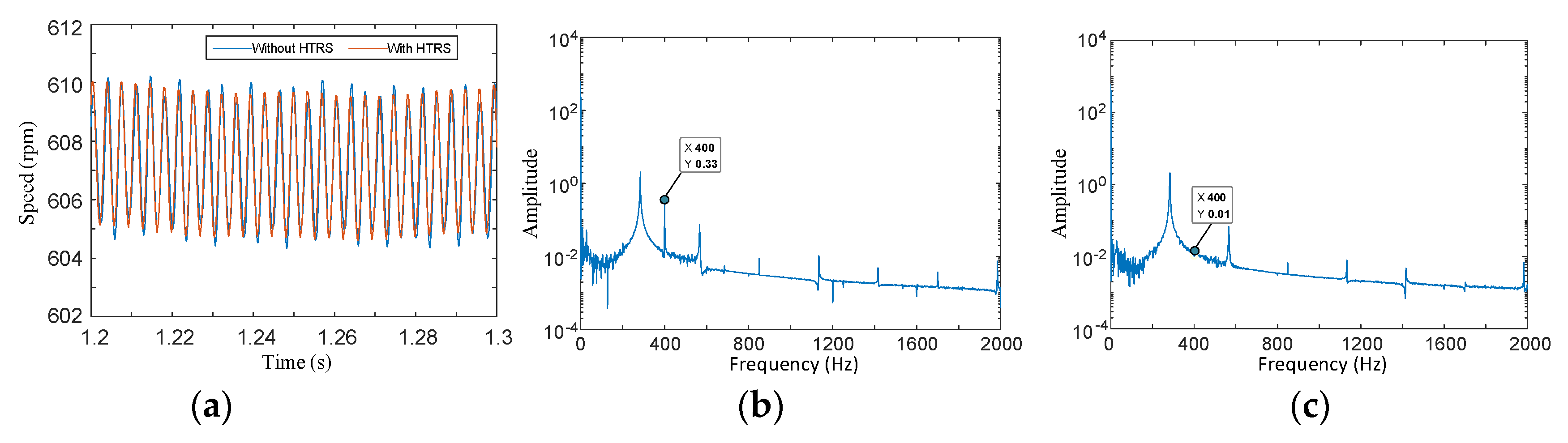
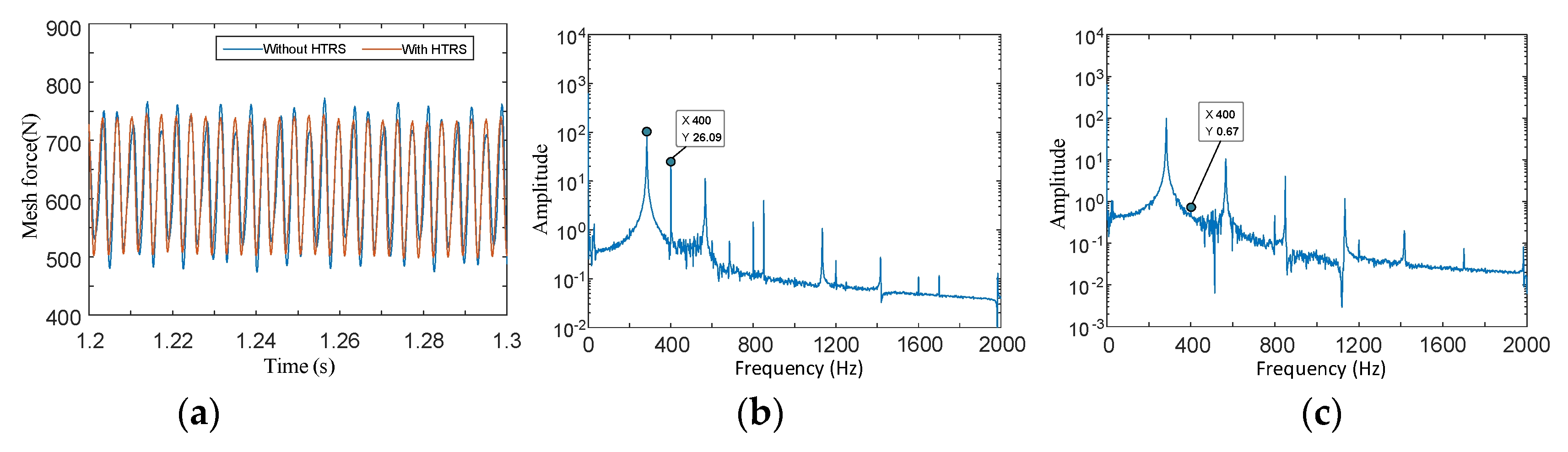
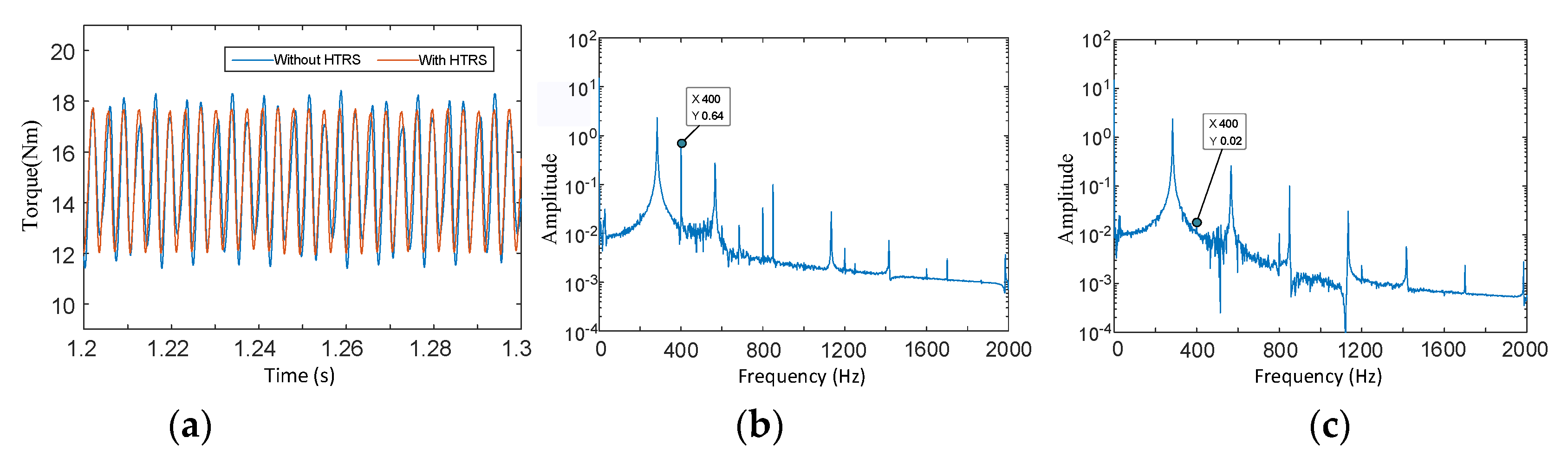
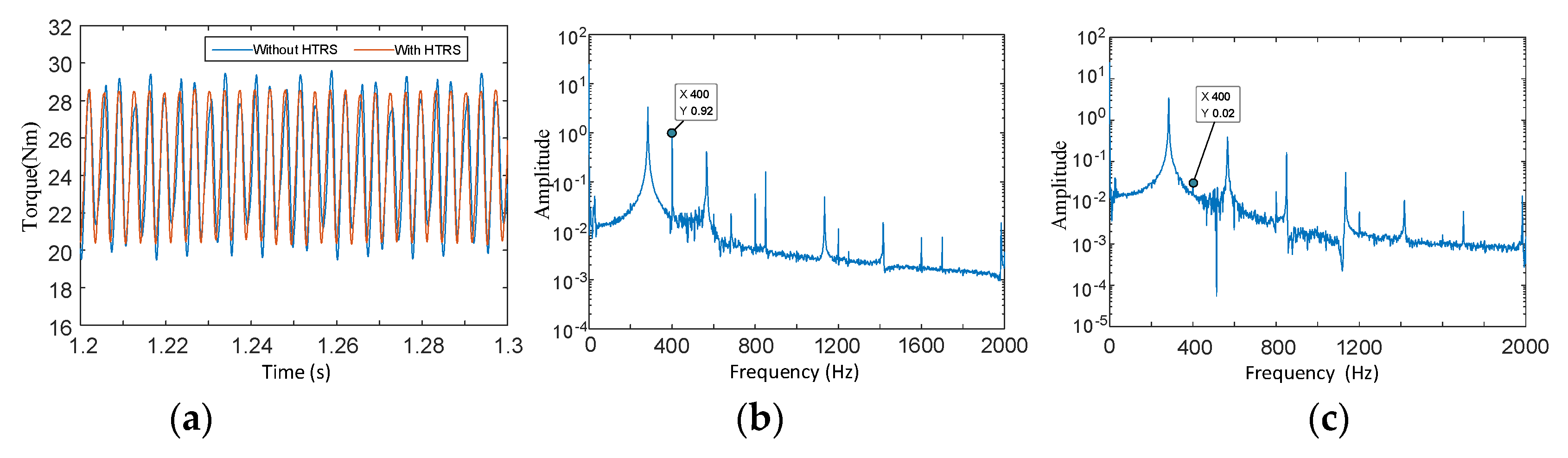
- By injecting harmonic voltage, a harmonic torque reduction strategy is proposed for an IEDS in this paper. Under the effect of the harmonic torque reduction strategy, the 5th and 7th harmonic currents are effectively reduced, and the total fluctuation amplitude of the electromagnetic torque is reduced by 50%. The simulation results show that the harmonic torque reduction strategy proposed in this paper can effectively reduce the harmonic torque of the IEDS, thus reducing the speed fluctuation and dynamic load of each component of the system and improving the stability of the IEDS.
Author Contributions
Funding
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Driving Gear | Driven Gear | Unit |
|---|---|---|---|
| Teeth number | Z1 = 17 | Z2 = 28 | - |
| Normal modulus mn | 3 | 3 | mm |
| Modulus of end face mt | 3.19 | 3.19 | mm |
| Tooth surface width b | 23 | 23 | mm |
| Normal pressure angle αn | 20 | 20 | deg |
| Transverse pressure angle αt | 21.17 | 21.17 | deg |
| Pitch circle helix angle β | 20 | 20 | deg |
| Parameter | Value | Unit |
|---|---|---|
| Numerical motor rotor and motor shaft moment of inertia Im | 0.035 | kg·m2 |
| Rotational inertia of driving gear of reducer I1 | 1.67 × 10−4 | kg·m2 |
| Rotational inertia of driven gear of reducer I2 | 1.2 × 10−3 | kg·m2 |
| Equivalent moment of inertia of final drive and differential Ig | 8 × 10−3 | kg·m2 |
| Wheel moment of inertia Iw | 0.915 | kg·m2 |
| Body equivalent moment of inertia IV | 139.8 | kg·m2 |
| Torsional stiffness of motor shaft ks1 | 8 × 104 | Nm/rad |
| Normal meshing stiffness per unit length of gear pair ku | 6 × 109 | Nm/mm |
| Torsional stiffness of output shaft ks2 | 2 × 105 | Nm/rad |
| Half shaft torsional stiffness ka | 8 × 103 | Nm/rad |
| Wheel torsional stiffness kV | 4.5 × 103 | Nm/rad |
| Torsional damping ratio of motor shaft cs1 | 2 | Nm∙s/rad |
| Gear meshing damping cm | 800 | N/(m/s) |
| Torsional damping ratio of output shaft cs2 | 2 | Nm∙s/rad |
Appendix B
References
- Wu, Y.C.; Sun, Z.H. Design and Analysis of a Novel Speed-Changing Wheel Hub with an Integrated Electric Motor for Electric Bicycles. Math. Probl. Eng. 2013, 2013, 8. [Google Scholar] [CrossRef]
- Burkhardt, Y.; Spagnolo, A.; Lucas, P.; Zavesky, M.; Brockerhoff, P.; IEEE. Design and analysis of a highly integrated 9-phase drivetrain for EV applications. In Proceedings of the 2014 International Conference on Electrical Machines, Berlin, Germany, 2–5 September 2014; pp. 450–456. [Google Scholar]
- Zhu, C.; Zeng, Z.; Zhao, R. Torque ripple elimination based on inverter voltage drop compensation for a three-phase four-switch inverter-fed PMSM drive under low speeds. IET Power Electron. 2017, 10, 1430–1437. [Google Scholar] [CrossRef]
- Viswanathan, V.; Seenithangom, J. Commutation Torque Ripple Reduction in the BLDC Motor Using Modified SEPIC and Three-Level NPC Inverter. IEEE Trans. Power Electron. 2018, 33, 535–546. [Google Scholar] [CrossRef]
- Viswanathan, V.; Jeevananthan, S. Hybrid converter topology for reducing torque ripple of BLDC motor. IET Power Electron. 2017, 10, 1572–1587. [Google Scholar] [CrossRef]
- Viswanathan, V.; Jeevananthan, S. Reducing torque ripple of BLDC motor by integrating dc-dc converter with three-level neutral-point-clamped inverter. Compel. Int. J. Comput. Math. Electr. Electron. Eng. 2016, 35, 959–981. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhu, C.; Jin, X.; Shi, W.; Zhao, R. Hybrid Space Vector Modulation Strategy for Torque Ripple Minimization in Three-Phase Four-Switch Inverter-Fed PMSM Drives. IEEE Trans. Ind. Electron. 2017, 64, 2122–2134. [Google Scholar] [CrossRef]
- Zhu, C.; Zeng, Z.; Zhao, R. Comprehensive Analysis and Reduction of Torque Ripples in Three-Phase Four-Switch Inverter-Fed PMSM Drives Using Space Vector Pulse-Width Modulation. IEEE Trans. Power Electron. 2017, 32, 5411–5424. [Google Scholar] [CrossRef]
- Baik, J.; Yun, S.; Kim, D.; Kwon, C.; Yoo, J. Remote-State PWM with Minimum RMS Torque Ripple and Reduced Common-Mode Voltage for Three-Phase VSI-Fed BLAC Motor Drives. Electronics 2020, 9, 586. [Google Scholar] [CrossRef]
- Joryo, S.; Tatsumi, K.; Morizane, T.; Taniguchi, K.; Kimura, N.; Omori, H.; IEEE. Study of Torque ripple reduction and Torque boost by Modified Trapezoidal Modulation. In Proceedings of the 2018 International Power Electronics Conference, Niigata, Japan, 20–24 May 2018; pp. 1202–1205. [Google Scholar]
- Shimmyo, S.; Takeuchi, K.; Takahashi, N.; Matsushita, M.; Ohnishi, K. Multi-level Motor Drives for Torque Ripple Suppression Taking Control Sensitivity into Account. IEEJ J. Ind. Appl. 2016, 5, 69–77. [Google Scholar] [CrossRef]
- Mohan, D.; Zhang, X.; Foo, G.H.B. Three-Level Inverter-Fed Direct Torque Control of IPMSM with Torque and Capacitor Voltage Ripple Reduction. IEEE Trans. Energy Convers. 2016, 31, 1559–1569. [Google Scholar] [CrossRef]
- Mohan, D.; Zhang, X.; Foo, G.H.B. A Simple Duty Cycle Control Strategy to Reduce Torque Ripples and Improve Low-Speed Performance of a Three-Level Inverter Fed DTC IPMSM Drive. IEEE Trans. Ind. Electron. 2017, 64, 2709–2721. [Google Scholar] [CrossRef]
- Wang, X.; Zhou, Y.; Yang, D.; Shi, X.; IEEE. Direct Torque Control of Three-Level Inverter-Fed PMSM Based on Zero Voltage Vector Distribution for Torque Ripple Reduction. In Proceedings of the 2017 29th Chinese Control and Decision Conference, Chongqing, China, 28–30 May 2017; pp. 7776–7781. [Google Scholar]
- Mohan, D.; Zhang, X.N.; Foo, G.H.B. Three-Level Inverter-Fed Direct Torque Control of IPMSM With Constant Switching Frequency and Torque Ripple Reduction. IEEE Trans. Ind. Electron. 2016, 63, 7908–7918. [Google Scholar] [CrossRef]
- Mohan, D.; Zhang, X.N.; Foo, G.H.B. Generalized DTC Strategy for Multilevel Inverter Fed IPMSMs With Constant Inverter Switching Frequency and Reduced Torque Ripples. IEEE Trans. Energy Convers. 2017, 32, 1031–1041. [Google Scholar] [CrossRef]
- Tatte, Y.N.; Aware, M.V. Torque Ripple and Harmonic Current Reduction in a Three-Level Inverter-Fed Direct-Torque-Controlled Five-Phase Induction Motor. IEEE Trans. Ind. Electron. 2017, 64, 5265–5275. [Google Scholar] [CrossRef]
- Dhiman, S.; Hussain, A.; Kumar, V.T. An Effective Voltage Switching State Algorithm for Direct Torque Controlled Five-Phase Induction Motor Drive to Reduce Torque Ripple. In Proceedings of the 2016 IEEE Students’ Conference on Electrical, Electronics and Computer Science, Bhopal, India, 5–6 March 2016. [Google Scholar]
- Zhang, G.Z.; Chen, C.; Gu, X.; Wang, Z.A.; Li, X.M. An Improved Model Predictive Torque Control for a Two-Level Inverter Fed Interior Permanent Magnet Synchronous Motor. Electronics 2019, 8, 769. [Google Scholar] [CrossRef]
- Dong, Y.; Nuchkrua, T.; Shen, T. Asymptotical stability contouring control of dual-arm robot with holonomic constraints: Modified distributed control framework. IET Control Theory Appl. 2019, 13, 2877–2885. [Google Scholar] [CrossRef]
- Li, K.L.; Boonto, S.; Nuchkrua, T. On-line Self Tuning of Contouring Control for High Accuracy Robot Manipulators under Various Operations. Int. J. Control Autom. Syst. 2020, 18, 1818–1828. [Google Scholar] [CrossRef]
- Lu, J.; Yang, J.G.; Ma, Y.C.; IEEE. Research on Harmonic Compensation for Flux and Current of Permanent Magnet Synchronous Motor. In Proceedings of the 2015 IEEE International Conference on Advanced Intelligent Mechatronics, Busan, Korea, 7–11 July 2015; pp. 589–594. [Google Scholar]
- Boroujeni, M.S.; Markadeh, G.R.A.; Soltani, J. Torque ripple reduction of brushless DC motor based on adaptive input-output feedback linearization. ISA Trans. 2017, 70, 502–511. [Google Scholar] [CrossRef]
- Boroujeni, M.S.; Markadeh, G.A.; Soltani, J.; IEEE. Adaptive Input-Output Feedback Linearization Control of Brushless DC Motor with Arbitrary Current Reference using Voltage Source Inverter. In Proceedings of the 2017 8th Power Electronics, Drive Systems & Technologies Conference, Mashhad, Iran, 14–16 February 2017; pp. 537–542. [Google Scholar]
- Jedryczka, C.; Danielczyk, D.; Szelag, W. Torque Ripple Minimization of the Permanent Magnet Synchronous Machine by Modulation of the Phase Currents. Sensors 2020, 20, 2406. [Google Scholar] [CrossRef]
- Boroujeni, M.S.; Markadeh, G.A.; Soltani, J.; Blaabjerg, F. Torque ripple reduction of brushless DC motor with harmonic current injection based on integral terminal sliding mode control. IET Electr. Power Appl. 2018, 12, 25–36. [Google Scholar] [CrossRef]
- Li, Z.; Peng, Z. Nonlinear dynamic response of a multi-degree of freedom gear system dynamic model coupled with tooth surface characters: A case study on coal cutters. Nonlinear Dyn. 2016, 84, 271–286. [Google Scholar] [CrossRef]
- Chen, Z.G.; Zhai, W.M.; Wang, K.Y. Vibration feature evolution of locomotive with tooth root crack propagation of gear transmission system. Mech. Syst. Signal Process. 2019, 115, 29–44. [Google Scholar] [CrossRef]
- Ding, H.L.; Kahraman, A. Interactions between nonlinear spur gear dynamics and surface wear. J. Sound Vibr. 2007, 307, 662–679. [Google Scholar] [CrossRef]
- Cai, Z.; Lin, C. Dynamic Model and Analysis of Nonlinear Vibration Characteristic of a Curve-Face Gear Drive. Stroj. Vestn. J. Mech. Eng. 2017, 63, 161–170. [Google Scholar] [CrossRef]
- Lin, C.; Liu, Y.; Gu, S.J. Analysis of nonlinear twisting vibration characteristics of orthogonal curve-face gear drive. J. Braz. Soc. Mech. Sci. Eng. 2015, 37, 1499–1505. [Google Scholar] [CrossRef]
- Parker, R.C.; Ambarisha, V.K.; Asme. Nonlinear dynamics of planetary gears using analytical and finite element models. J. Sound Vib. 2008, 302, 577–595. [Google Scholar]
- Liu, C.Z.; Qin, D.T.; Wei, J.; Liao, Y.H. Investigation of nonlinear characteristics of the motor-gear transmission system by trajectory-based stability preserving dimension reduction methodology. Nonlinear Dyn. 2018, 94, 1835–1850. [Google Scholar] [CrossRef]
- Bai, W.; Qin, D.; Wang, Y.; Lim, T.C. Dynamic characteristics of motor-gear system under load saltations and voltage transients. Mech. Syst. Signal Process. 2018, 100, 1–16. [Google Scholar] [CrossRef]
- Bai, W.; Qin, D.; Wang, Y.; Lim, T.C. Dynamic characteristic of electromechanical coupling effects in motor-gear system. J. Sound Vib. 2018, 423, 50–64. [Google Scholar] [CrossRef]
- Wang, Z.W.; Mei, G.M.; Xiong, Q.; Yin, Z.H.; Zhang, W.H. Motor car-track spatial coupled dynamics model of a high-speed train with traction transmission systems. Mech. Mach. Theory 2019, 137, 386–403. [Google Scholar] [CrossRef]
- Wei, J.T.; Kang, J.S.; Cui, Y.H. Analysis and Inhibition of Permanent Magnet Synchronous Motor Torque Ripple. Mechatronics 2014, 12, 15–19. [Google Scholar] [CrossRef]
- Liao, Y.; Zhen, S.; Liu, R.; Yao, J. Torque Ripple Suppression of Permanent Magnet Synchronous Motor by the Harmonic Injection. In Proceedings of the 2018 Asia-Pacific Magnetic Recording Conference, Shanghai, China, 15–17 November 2011; Volume 21, pp. 121–129. [Google Scholar]






























| Parameter | Value | Unit |
|---|---|---|
| Peak power | 60 | kW |
| Peak torque | 250 | Nm |
| Maximum speed | 7000 | rpm |
| Base speed | 2292 | rpm |
| DC voltage | 650 | V |
| Stator resistance | 0.153 | Ω |
| Stator inductance | 1.8 | mH |
| Permanent magnet flux linkage | 0.2778 | Wb |
| Pole number Pn | 4 | - |
| Phase current limit | 150 | A |
| Parameter | Valve | Unit |
|---|---|---|
| DC bus voltage udc | 650 | V |
| Modulation carrier period TPWM | 100 | μs |
| IGBT turn on time ton | 1 | μs |
| Voltage drop of IGBT switch tube ut | 3 | V |
| Modulation carrier frequency fPWM | 10 | kHz |
| Dead time td | 4 | μs |
| IGBT turn off time toff | 2 | μs |
| Conduction voltage drop of freewheeling diode ud | 2 | V |
| Parameter | Before Adding Harmonic Torque Reduction Strategy | After Adding Harmonic Torque Reduction Strategy | Optimization Effect (%) |
|---|---|---|---|
| 5th harmonic current amplitude (A) | 1.234 | 0.06 | 95.1 |
| 7th harmonic current amplitude (A) | 0.214 | 0.006 | 97.2 |
| 6th harmonic torque (Nm) | 2.909 | 0.06 | 97.9 |
| Overall fluctuation amplitude of motor torque (Nm) | 10 | 5 | 50.0 |
| Fluctuation amplitude of motor shaft speed (rpm) | 0.25 | 0.01 | 96.0 |
| Amplitude of driving gear speed fluctuation caused by 6th harmonic torque (rpm) | 0.44 | 0.01 | 97.7 |
| Fluctuation amplitude of driven gear speed caused by 6th harmonic torque (rpm) | 0.33 | 0.01 | 97.0 |
| Amplitude of meshing force fluctuation of gear pair caused by 6th harmonic torque (N) | 26.09 | 0.67 | 97.4 |
| Amplitude of shaft dynamic load fluctuation caused by 6th harmonic torque (Nm) | 0.64 | 0.02 | 96.9 |
| Amplitude of output shaft dynamic load fluctuation caused by 6th harmonic torque (Nm) | 0.92 | 0.02 | 97.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, J.; Yang, Y.; Jia, M.; Guan, Y.; Fu, C.; Liao, S. Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle. Electronics 2020, 9, 1241. https://doi.org/10.3390/electronics9081241
Hu J, Yang Y, Jia M, Guan Y, Fu C, Liao S. Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle. Electronics. 2020; 9(8):1241. https://doi.org/10.3390/electronics9081241
Chicago/Turabian StyleHu, Jianjun, Ying Yang, Meixia Jia, Yongjie Guan, Chunyun Fu, and Shuiping Liao. 2020. "Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle" Electronics 9, no. 8: 1241. https://doi.org/10.3390/electronics9081241
APA StyleHu, J., Yang, Y., Jia, M., Guan, Y., Fu, C., & Liao, S. (2020). Research on Harmonic Torque Reduction Strategy for Integrated Electric Drive System in Pure Electric Vehicle. Electronics, 9(8), 1241. https://doi.org/10.3390/electronics9081241