Discrete-Time Neural Control of Quantized Nonlinear Systems with Delays: Applied to a Three-Phase Linear Induction Motor




Abstract
:1. Introduction
2. Problem Statement
2.1. System Definition
2.2. Inverse Optimal Control Methodology
2.3. Quantizers in a Control Loop
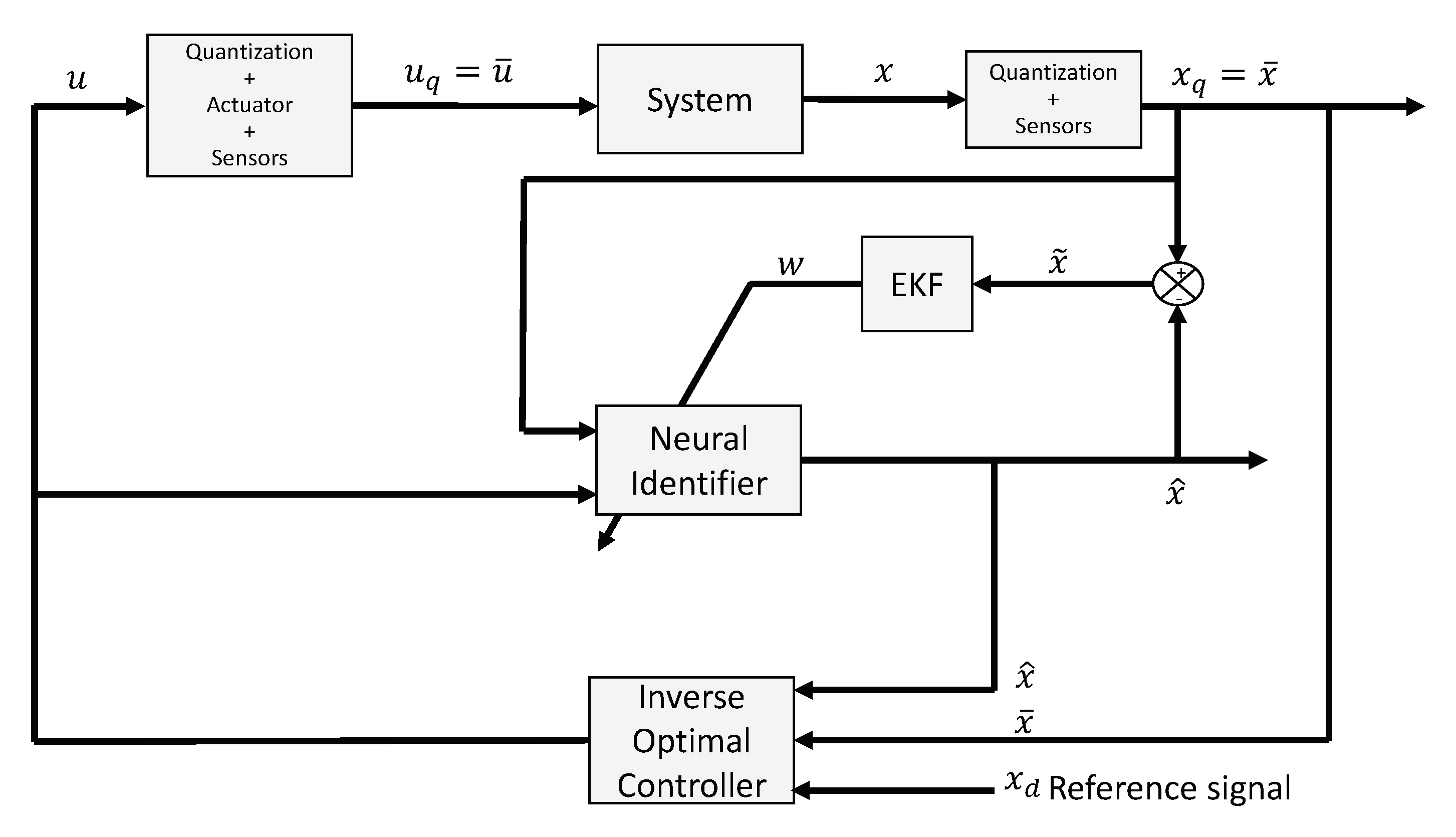
3. Neural Controller Design
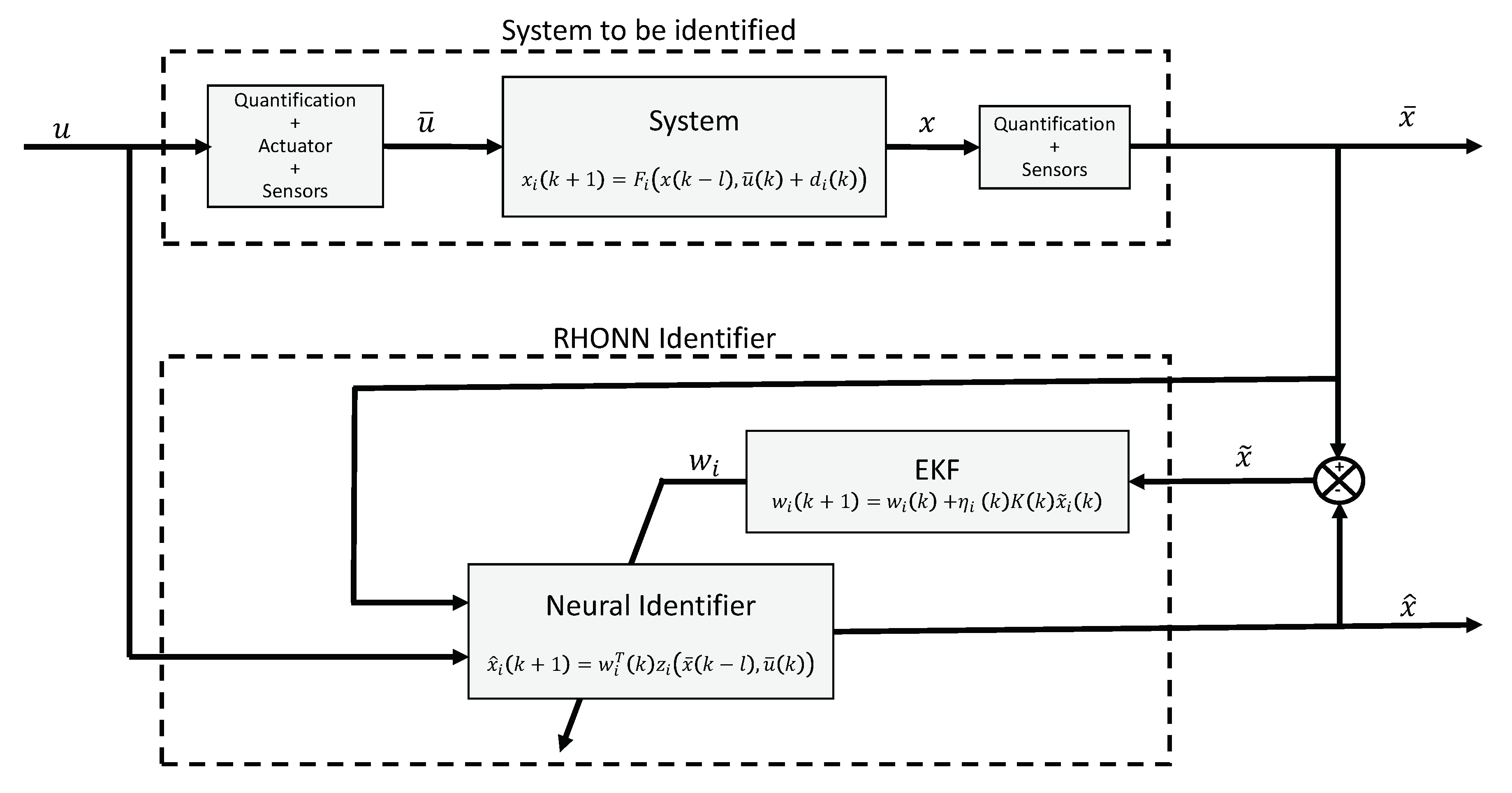
3.1. Neural Identification
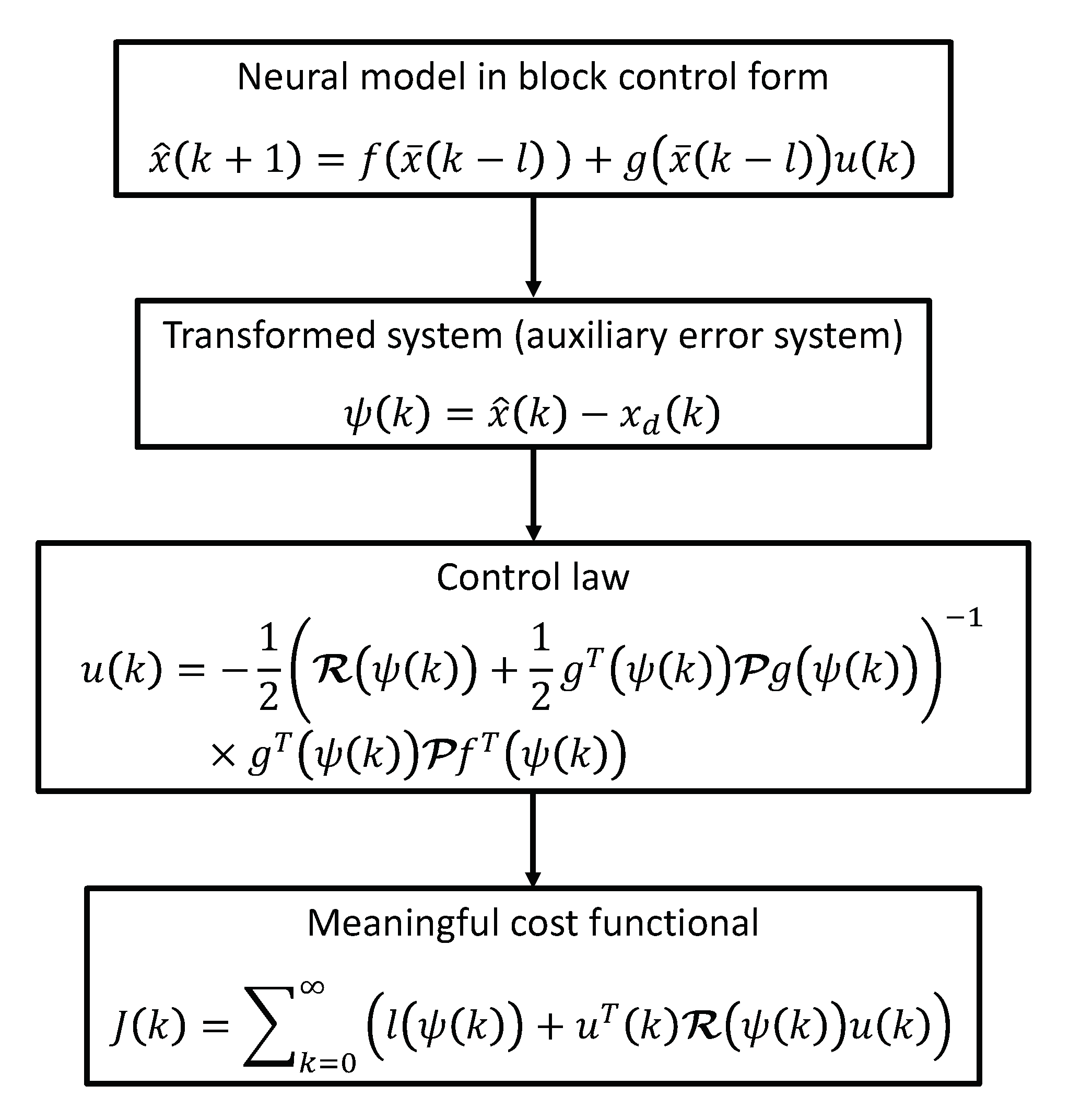
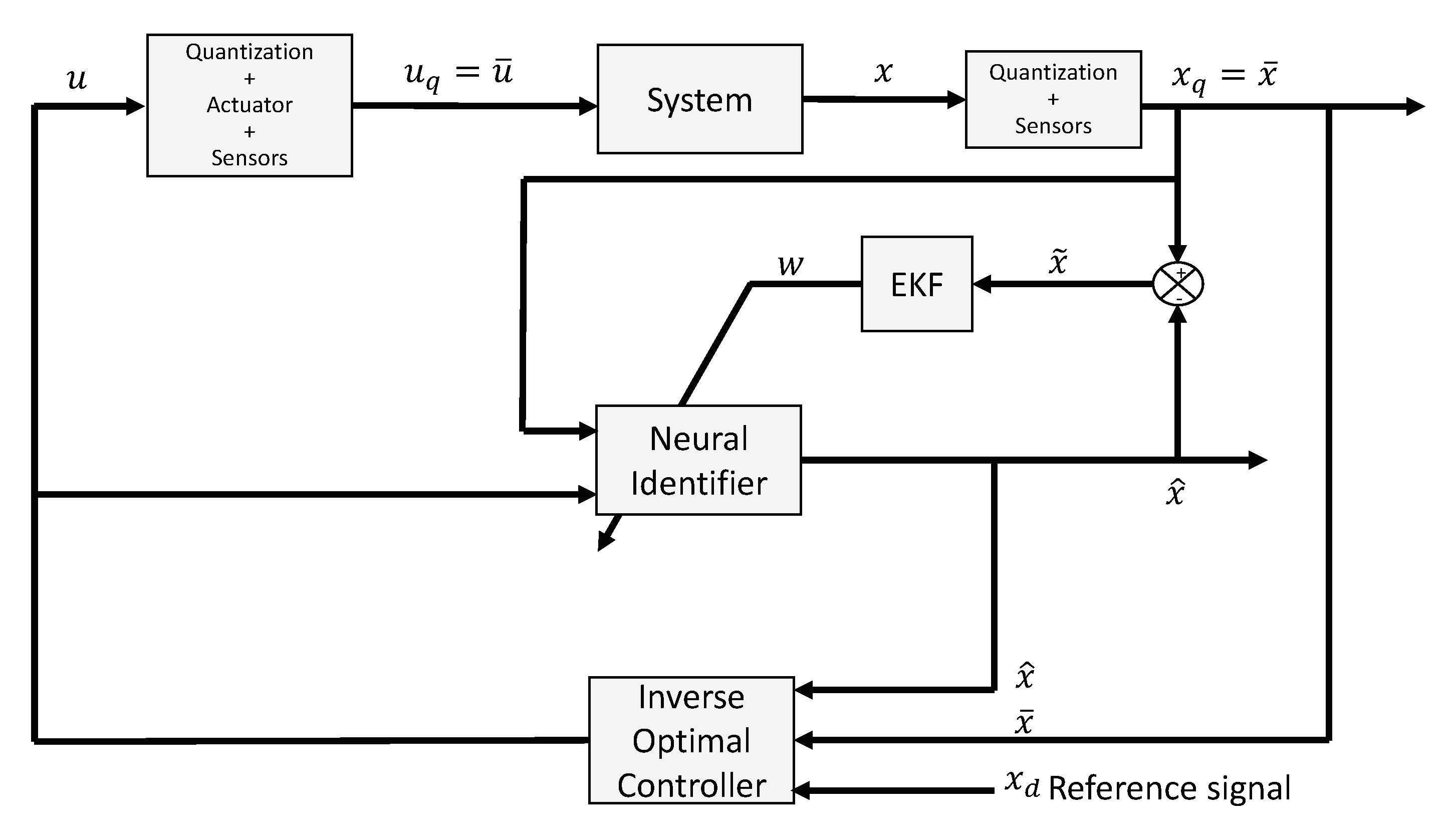
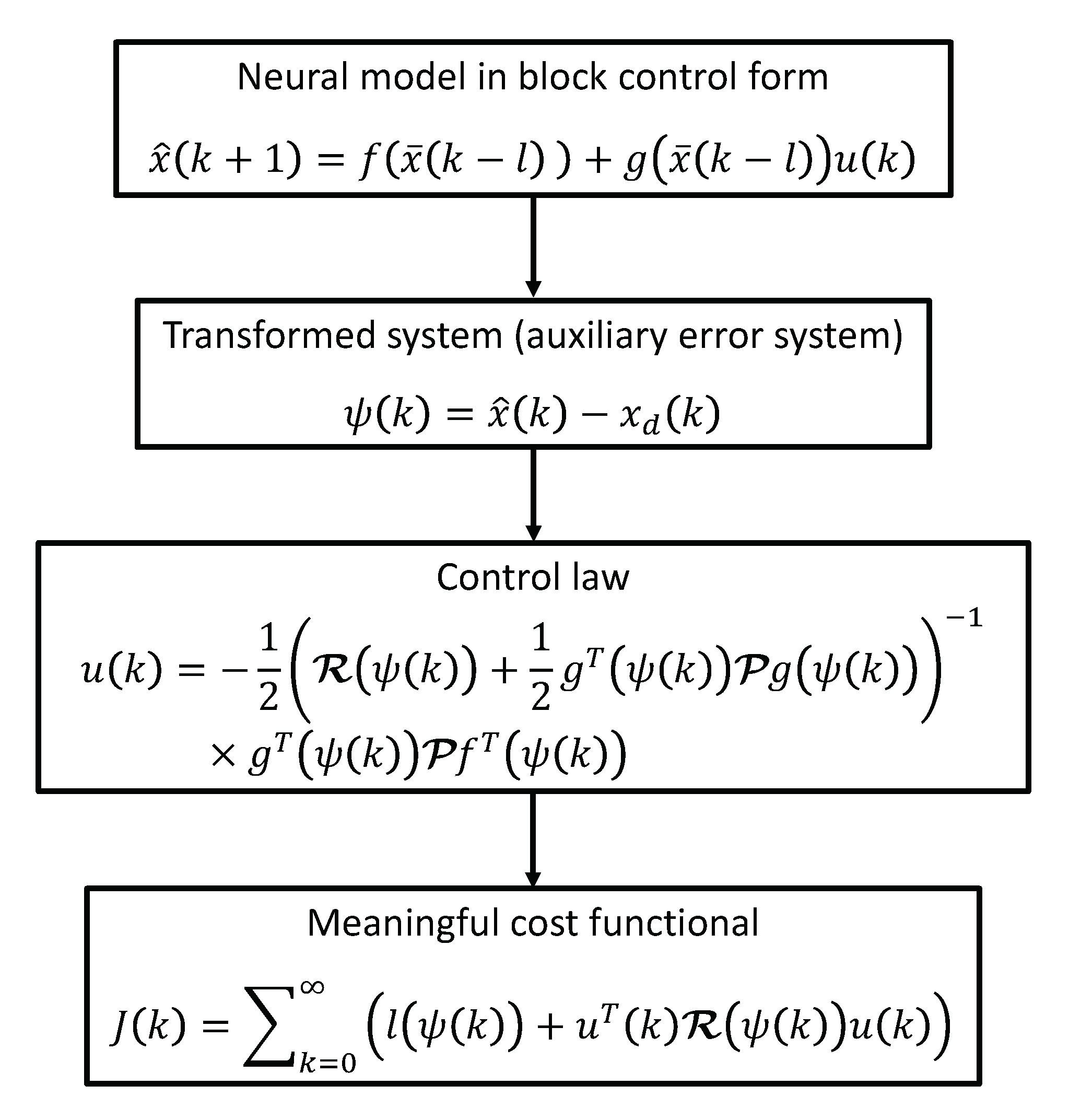
3.2. Neural Inverse Optimal Control
4. Real-Time Results
4.1. Implementation to a LIM
4.2. NIOC Scheme
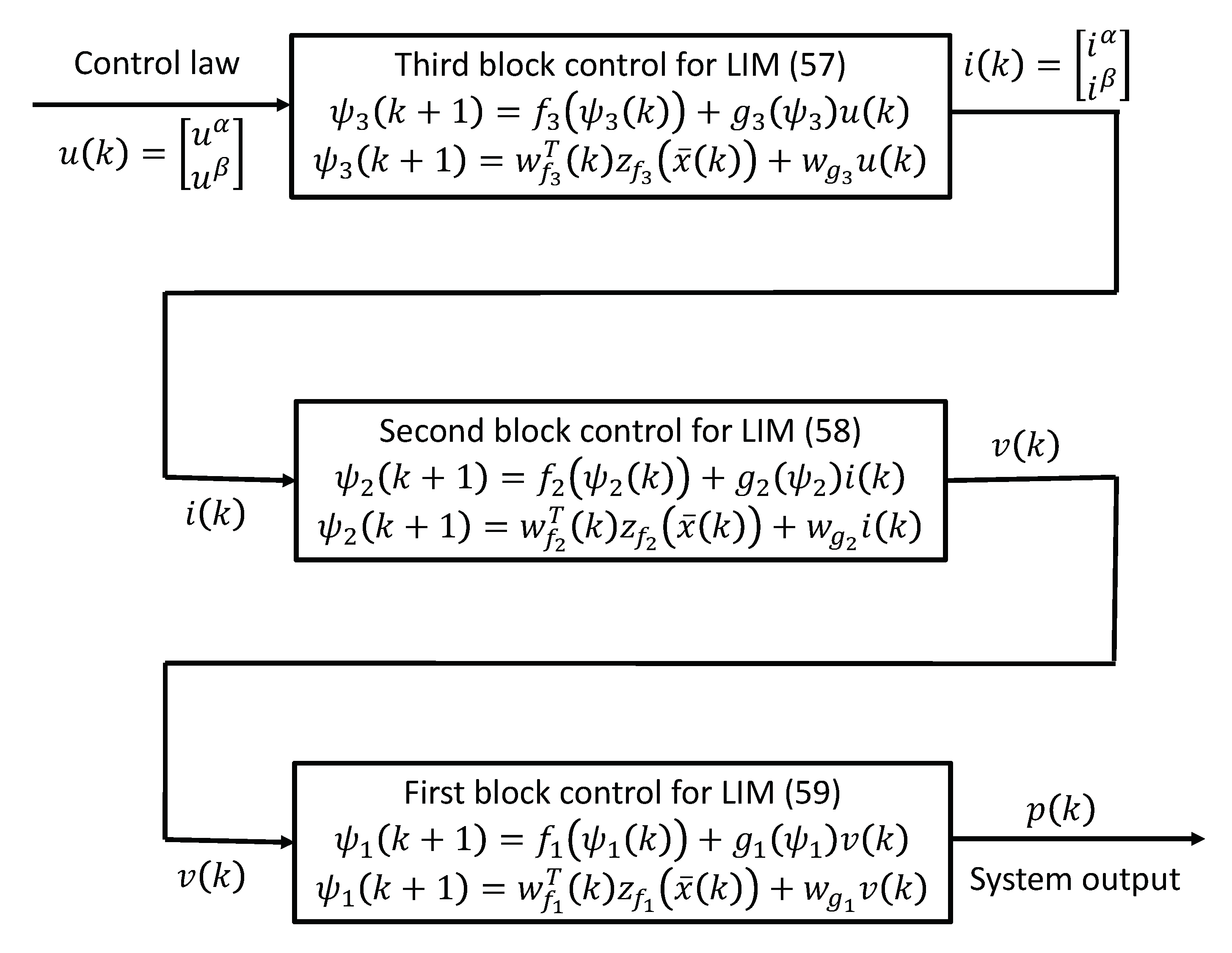
4.2.1. RHONN Model
4.2.2. Inverse Optimal Control
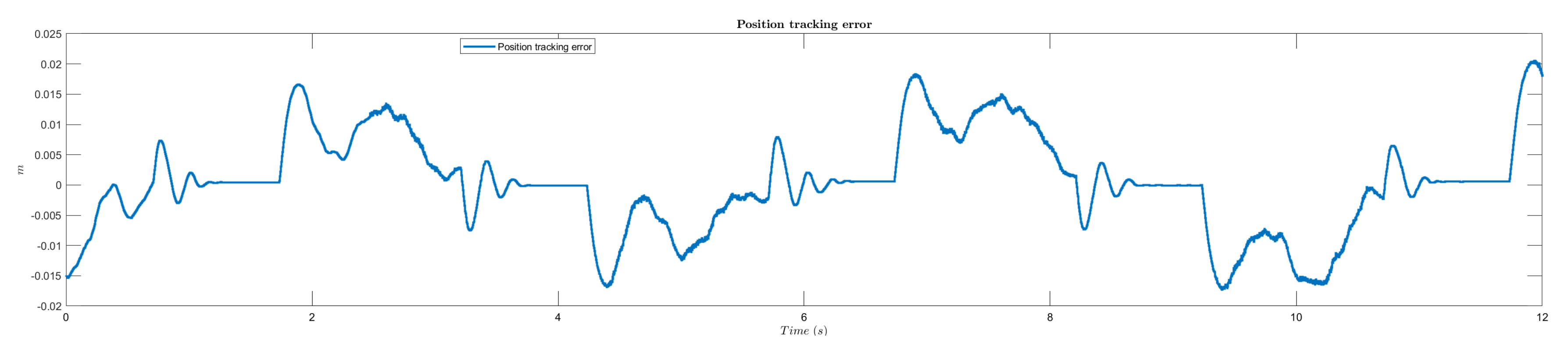
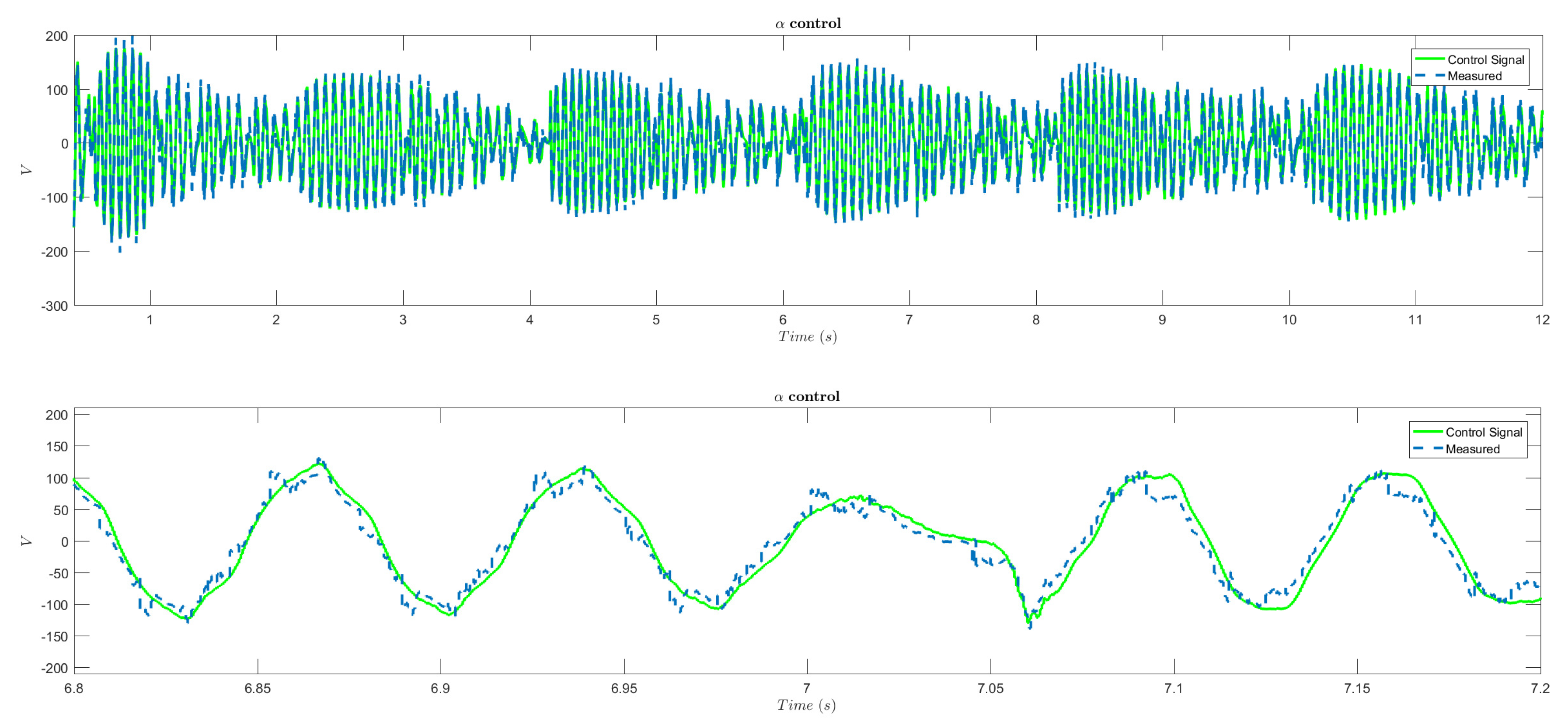
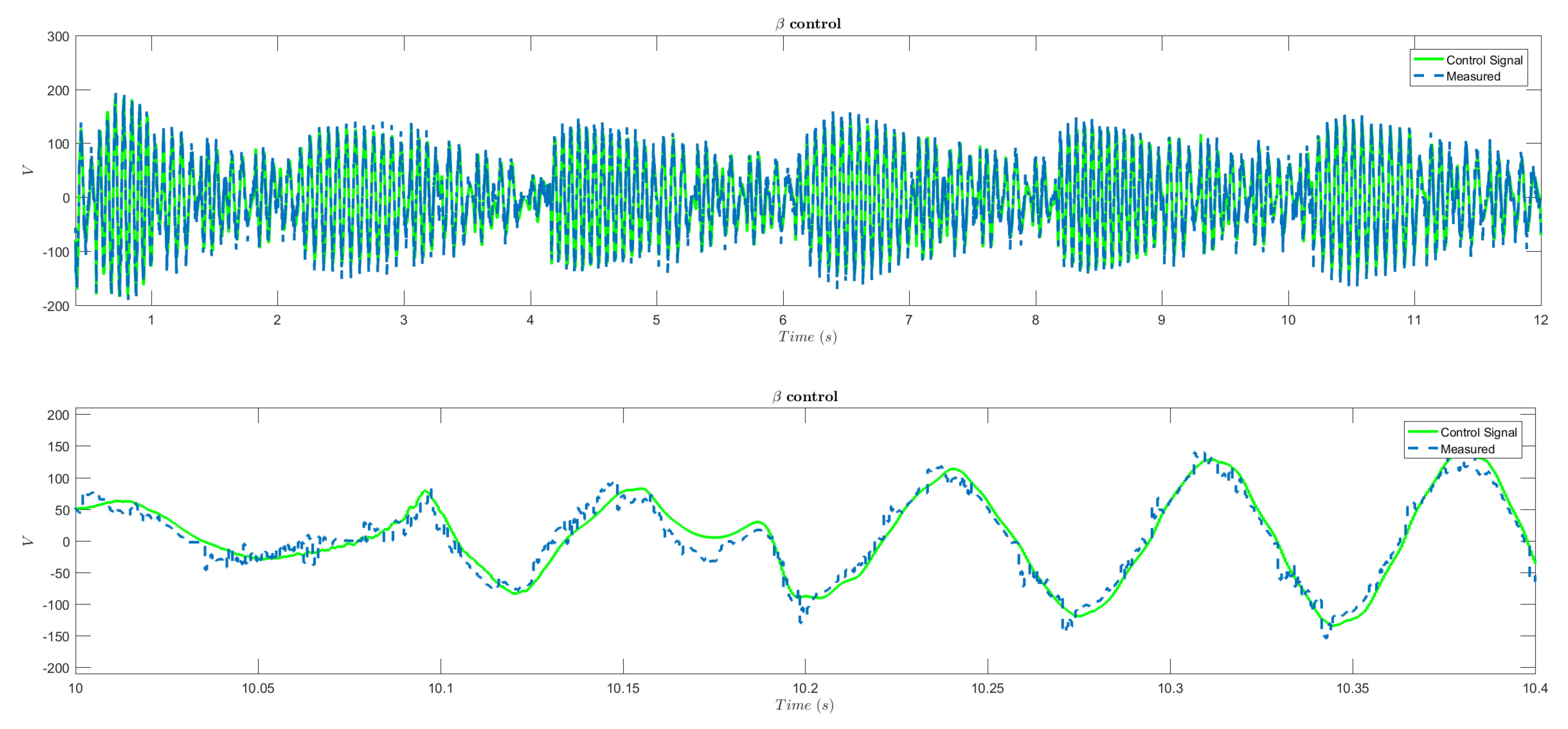
4.3. Results
4.4. Comparative Analysis
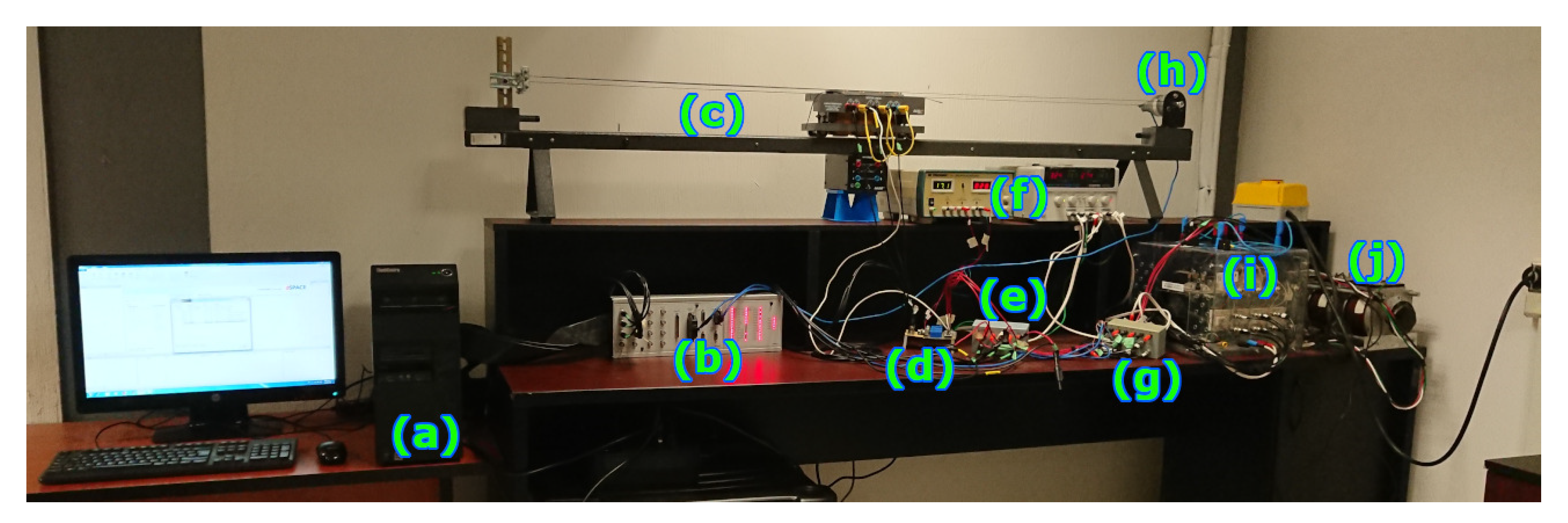
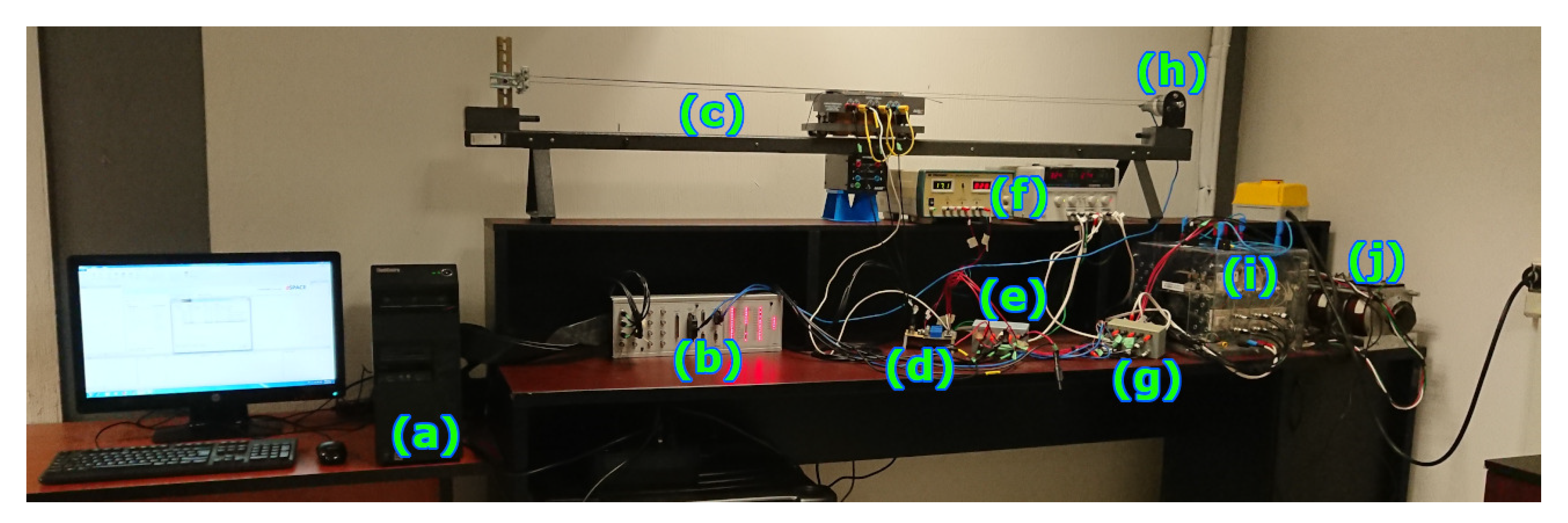
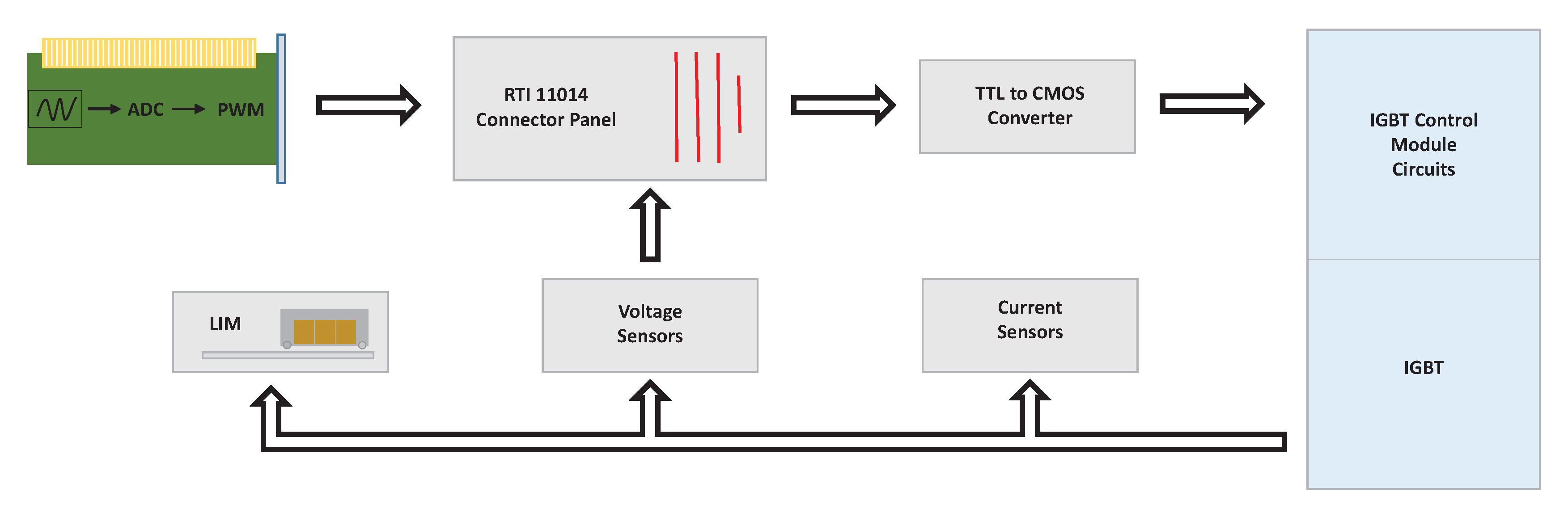
4.5. Discussion about Experimental Environment
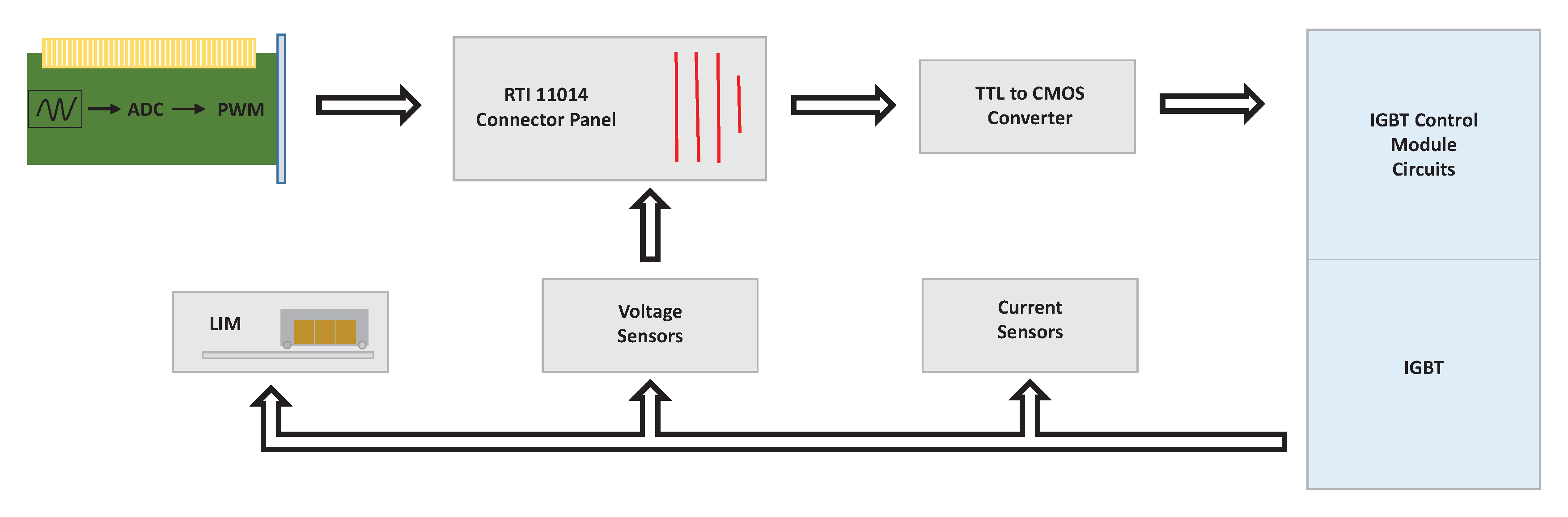
- Voltage and current sensors are characterized by the presence of noise, measurement error, and quantization error.
- IGBT module has a limited frequency of operation as well as the AC power supply saturates its output. Moreover, the IGBT module has its controllers for IGBTs, which provoke unknown dynamics.
- TTL to CMOS converter, cause noise, uncertainties and unknown dynamics and quantization effects.
- Computer equipment and dSPACE® 1104 board, presents quantization effects mainly due to the signal conversions at input and output and unknown dynamics provoked by inner circuits.
- LIM contains high nonlinear behaviors, including end effects and unknown uncertainties, mainly due to winding heating, unknown dynamics, hysteresis effects, and parasitic currents, among unknown disturbances by mass effects and the presence of friction, among others. Moreover, this kind of system does not exhibit evident delays effects. However, in this experiment, the delays have been externally included through a time-delay MATLAB® block, as explained in Section 4.3.
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| RHONN | Recurrent high order neural network |
| EKF | Extended Kalman filter |
| SGUUB | Semi-globally uniformly ultimately bounded |
| NIOC | Neural inverse optimal control |
| LIM | Linear induction motor |
| RMSE | Root mean square error |
References
- Alanis, A.Y.; Rios, J.D.; Arana-Daniel, N.; Lopez-Franco, C. Neural identifier for unknown discrete-time nonlinear delayed systems. Neural Comput. Appl. 2016, 27, 2453–2464. [Google Scholar] [CrossRef]
- Rios, J.D.; Alanis, A.Y.; Lopez-Franco, C.; Arana-Daniel, N. RHONN identifier-control scheme for nonlinear discrete-time systems with unknown time-delays. J. Frankl. Inst. 2018, 355, 218–249. [Google Scholar] [CrossRef]
- Zhang, D.; Han, Q.; Zhang, X. Network-Based Modeling and Proportional–Integral Control for Direct-Drive-Wheel Systems in Wireless Network Environments. IEEE Trans. Cybern. 2020, 50, 2462–2474. [Google Scholar] [CrossRef] [PubMed]
- Zhang, D.; Zhou, Z.; Jia, X. Networked fuzzy output feedback control for discrete-time Takagi–Sugeno fuzzy systems with sensor saturation and measurement noise. Inf. Sci. 2018, 457–458, 182–194. [Google Scholar] [CrossRef]
- Okuyama, Y. Discrete Control Systems; Springer: London, UK, 2014. [Google Scholar]
- Kalman, R.E. Nonlinear aspects of sampled-data control systems. In Proceedings of the Symposium on Nonlinear Circuit Analysis VI; Polytechnic Institute of Brooklyn: Brooklyn, NY, USA, 1956; pp. 273–313. [Google Scholar]
- Xia, Y.; Fu, M.; Liu, G. Analysis and Synthesis of Networked Control Systems; Lecture Notes in Control and Information Sciences; Springer: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Isidori, A. Nonlinear Control Systems; Communications and Control Engineering; Springer: London, UK, 2013. [Google Scholar]
- Khalil, H. Nonlinear Systems; Pearson Education, Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Liu, Y.; Peng, Y.; Wang, B.; Yao, S.; Liu, Z. Review on cyber-physical systems. IEEE/CAA J. Autom. Sin. 2017, 4, 27–40. [Google Scholar] [CrossRef]
- Chen, G. Pinning control and controllability of complex dynamical networks. Int. J. Autom. Comput. 2017, 14, 1–9. [Google Scholar] [CrossRef]
- Salgado, I.; Ahmed, H.; Camacho, O.; Chairez, I. Adaptive sliding-mode observer for second order discrete-time MIMO nonlinear systems based on recurrent neural-networks. Int. J. Mach. Learn. Cybern. 2019, 10, 2851–2866. [Google Scholar] [CrossRef]
- Li, L.; Zheng, N.; Wang, F. On the Crossroad of Artificial Intelligence: A Revisit to Alan Turing and Norbert Wiener. IEEE Trans. Cybern. 2019, 49, 3618–3626. [Google Scholar] [CrossRef]
- Wu, W.; Wang, C.; Yuan, C. Deterministic learning from sampling data. Neurocomputing 2019, 358, 456–466. [Google Scholar] [CrossRef]
- Liu, C.; Liu, X.; Wang, H.; Zhou, Y.; Lu, S. Observer-based adaptive fuzzy funnel control for strict-feedback nonlinear systems with unknown control coefficients. Neurocomputing 2019, 358, 467–478. [Google Scholar] [CrossRef]
- Xi, C.; Dong, J. Adaptive neural network-based control of uncertain nonlinear systems with time-varying full-state constraints and input constraint. Neurocomputing 2019, 357, 108–115. [Google Scholar] [CrossRef]
- Chang, X.; Xiong, J.; Li, Z.; Park, J.H. Quantized Static Output Feedback Control For Discrete-Time Systems. IEEE Trans. Ind. Inform. 2018, 14, 3426–3435. [Google Scholar] [CrossRef]
- Xu, H.; Zhao, Q.; Jagannathan, S. Finite-Horizon Near-Optimal Output Feedback Neural Network Control of Quantized Nonlinear Discrete-Time Systems With Input Constraint. IEEE Trans. Neural Netw. Learn. Syst. 2015, 26, 1776–1788. [Google Scholar] [CrossRef] [PubMed]
- Wang, Y.; Shen, H.; Duan, D. On Stabilization of Quantized Sampled-Data Neural-Network-Based Control Systems. IEEE Trans. Cybern. 2017, 47, 3124–3135. [Google Scholar] [CrossRef] [PubMed]
- Zhou, J.; Wang, W. Adaptive Control of Quantized Uncertain Nonlinear Systems. IFAC-PapersOnLine 2017, 50, 10425–10430. [Google Scholar] [CrossRef]
- Wang, C.C.; Yang, G.H. Prescribed performance adaptive fault-tolerant tracking control for nonlinear time-delay systems with input quantization and unknown control directions. Neurocomputing 2018, 311, 333–343. [Google Scholar] [CrossRef]
- Lopez, V.G.; Sanchez, E.N.; Alanis, A.Y.; Rios, J.D. Real-time neural inverse optimal control for a linear induction motor. Int. J. Control. 2017, 90, 800–812. [Google Scholar] [CrossRef]
- Sanchez, E.; Ornelas-Tellez, F. Discrete-Time Inverse Optimal Control for Nonlinear Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Rovithakis, G.; Christodoulou, M. Adaptive Control with Recurrent High-Order Neural Networks: Theory and Industrial Applications; Advances in Industrial Control; Springer: London, UK, 2012. [Google Scholar]
- Boldea, I.; Nasar, S. Linear Electric Actuators and Generators; Cambridge University Press: Cambridge, UK, 2005. [Google Scholar]
- Takahashi, I.; Ide, Y. Decoupling control of thrust and attractive force of a LIM using a space vector control inverter. IEEE Trans. Ind. Appl. 1993, 29, 161–167. [Google Scholar] [CrossRef]
- Levin, A.U.; Narendra, K.S. Control of nonlinear dynamical systems using neural networks: Controllability and stabilization. IEEE Trans. Neural Netw. 1993, 4, 192–206. [Google Scholar] [CrossRef]
- Sanchez, E.; Alanís, A.; Loukianov, A. Discrete-Time High Order Neural Control: Trained with Kalman Filtering; Studies in Computational Intelligence; Springer: Berlin/Heidelberg, Germay, 2008. [Google Scholar]
- Ornelas-Tellez, F.; Alanis, A.Y.; Rios, J.D.; Graff, M. Reduced-order observer for state-dependent coefficient factorized nonlinear systems. Asian J. Control. 2019, 21, 1216–1227. [Google Scholar] [CrossRef]
- Alanis, A.Y.; Rios, J.D.; Rivera, J.; Arana-Daniel, N.; Lopez-Franco, C. Real-time discrete neural control applied to a Linear Induction Motor. Neurocomputing 2015, 164, 240–251. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| i | P | Q | R | |
|---|---|---|---|---|
| 2 | ||||
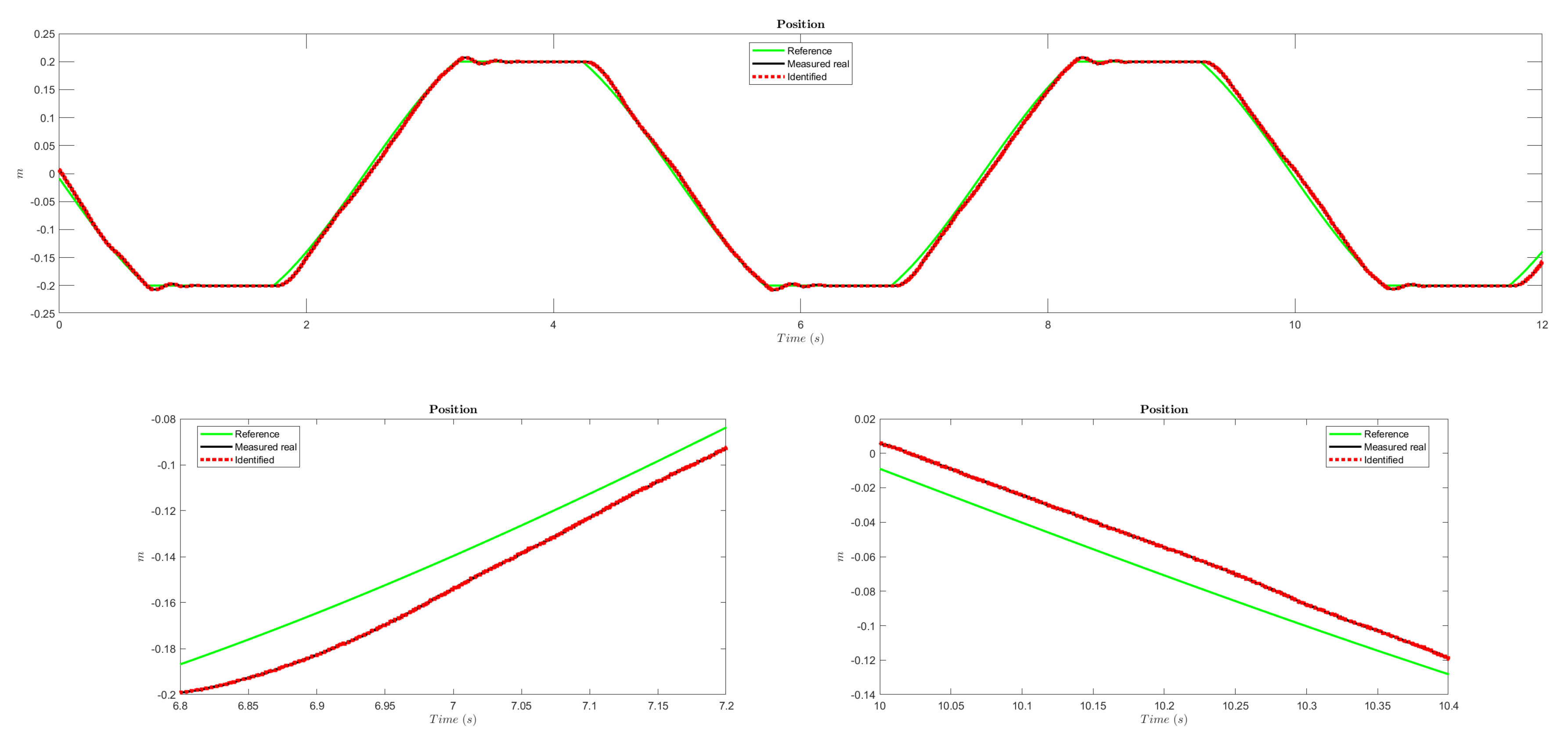
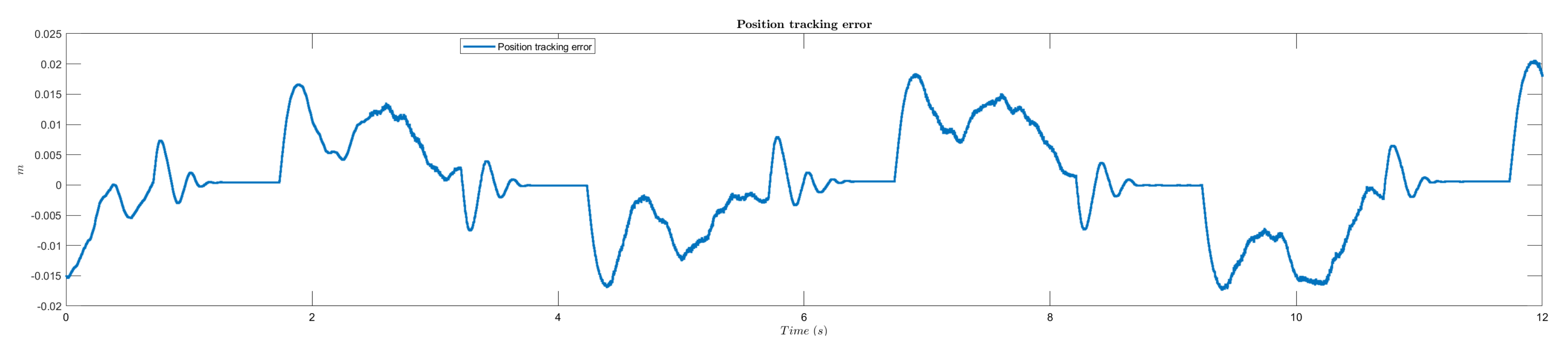
| State Variable | RMSE |
|---|---|
| m | |
| 0000607 m/s | |
| Wb2 | |
| A | |
| A |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alanis, A.Y.; Rios, J.D.; Gomez-Avila, J.; Zuniga, P.; Jurado, F. Discrete-Time Neural Control of Quantized Nonlinear Systems with Delays: Applied to a Three-Phase Linear Induction Motor. Electronics 2020, 9, 1274. https://doi.org/10.3390/electronics9081274
Alanis AY, Rios JD, Gomez-Avila J, Zuniga P, Jurado F. Discrete-Time Neural Control of Quantized Nonlinear Systems with Delays: Applied to a Three-Phase Linear Induction Motor. Electronics. 2020; 9(8):1274. https://doi.org/10.3390/electronics9081274
Chicago/Turabian StyleAlanis, Alma Y., Jorge D. Rios, Javier Gomez-Avila, Pavel Zuniga, and Francisco Jurado. 2020. "Discrete-Time Neural Control of Quantized Nonlinear Systems with Delays: Applied to a Three-Phase Linear Induction Motor" Electronics 9, no. 8: 1274. https://doi.org/10.3390/electronics9081274
APA StyleAlanis, A. Y., Rios, J. D., Gomez-Avila, J., Zuniga, P., & Jurado, F. (2020). Discrete-Time Neural Control of Quantized Nonlinear Systems with Delays: Applied to a Three-Phase Linear Induction Motor. Electronics, 9(8), 1274. https://doi.org/10.3390/electronics9081274