Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test



Abstract
1. Introduction
2. Method and System Implementation
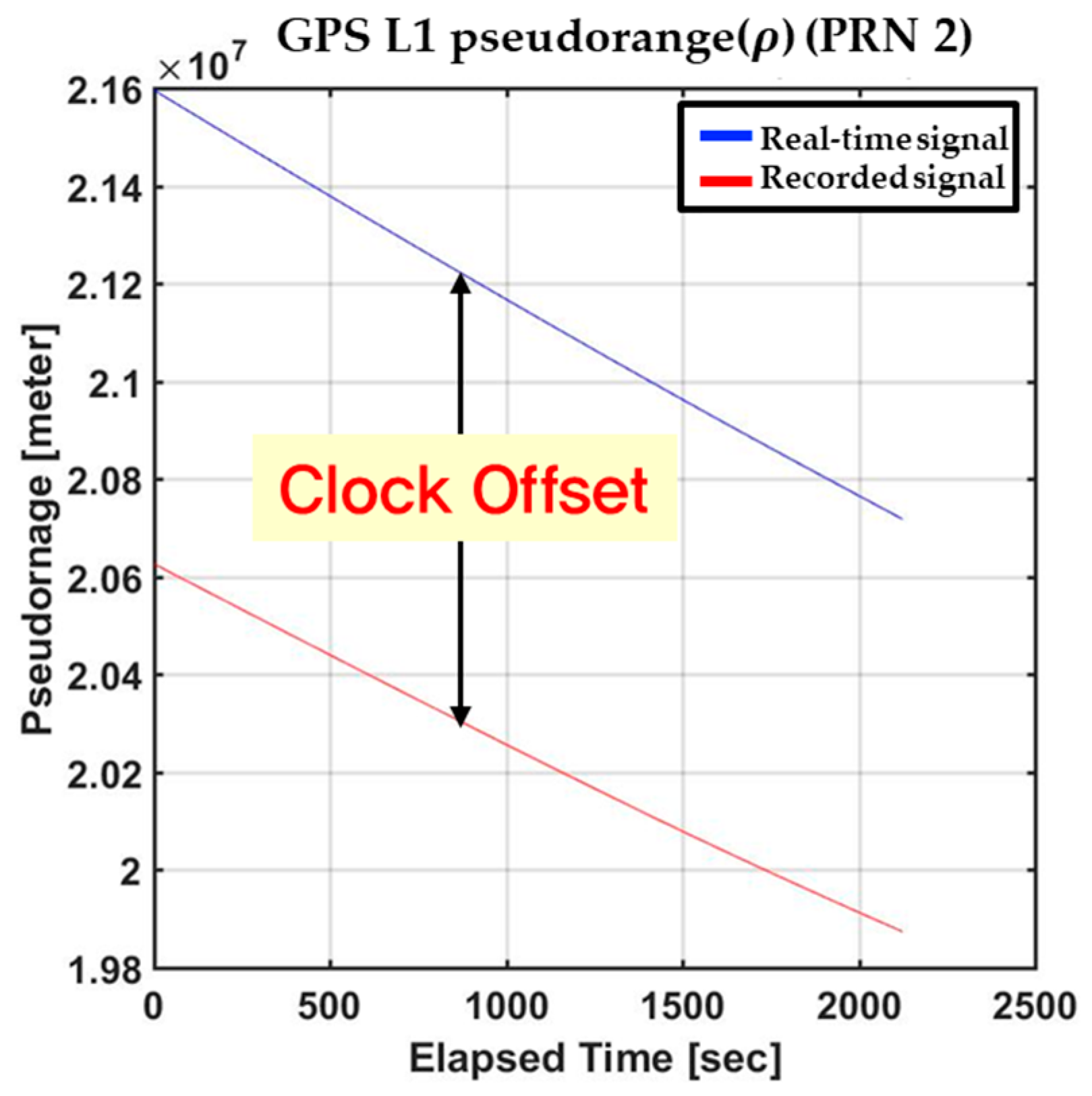
2.1. GNSS Signal Recording and Replaying
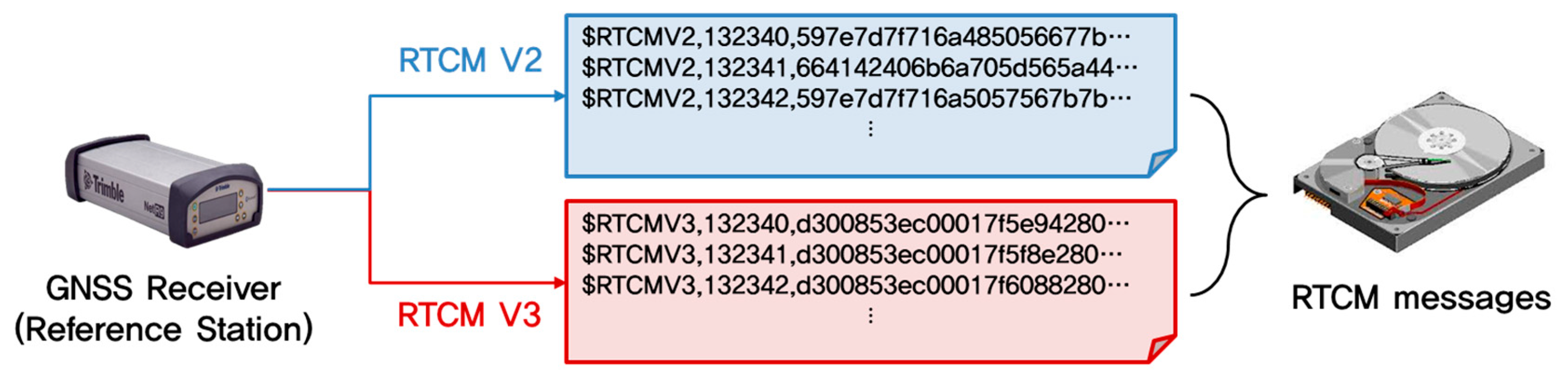
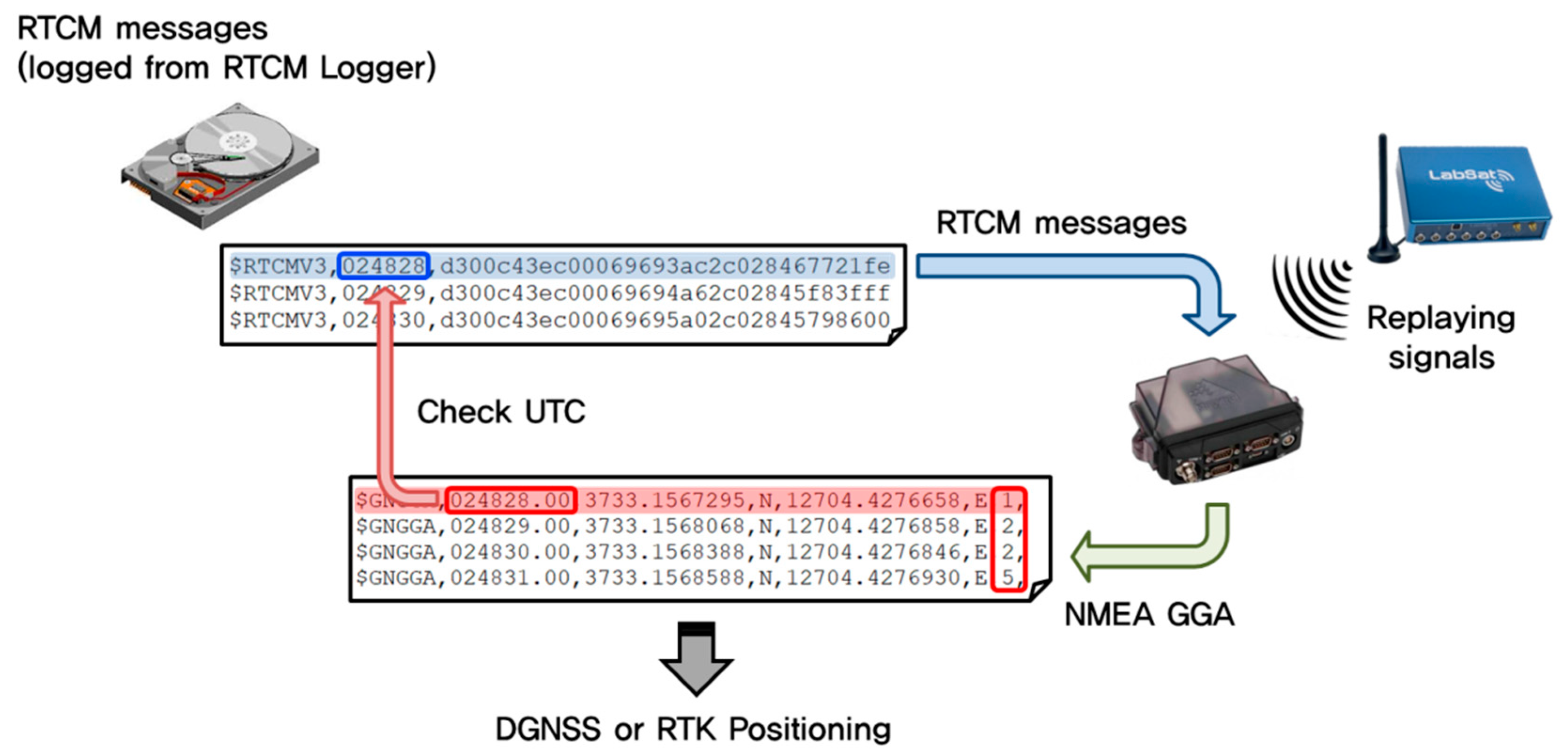
2.2. Software for Logging and Broadcasting RTCM Messages
2.3. Performance Evaluation Method of Various GNSS Receivers
3. Verification of the Performance Evaluation System
3.1. Static Test Configuration
3.2. Measurement-Domain Test
3.3. Position-Domain Test
4. Flight Test Performance Evaluation
4.1. Drone Flight Test Configurations
4.2. Stand-Alone Mode
4.3. DGPS Mode
4.4. RTK Mode
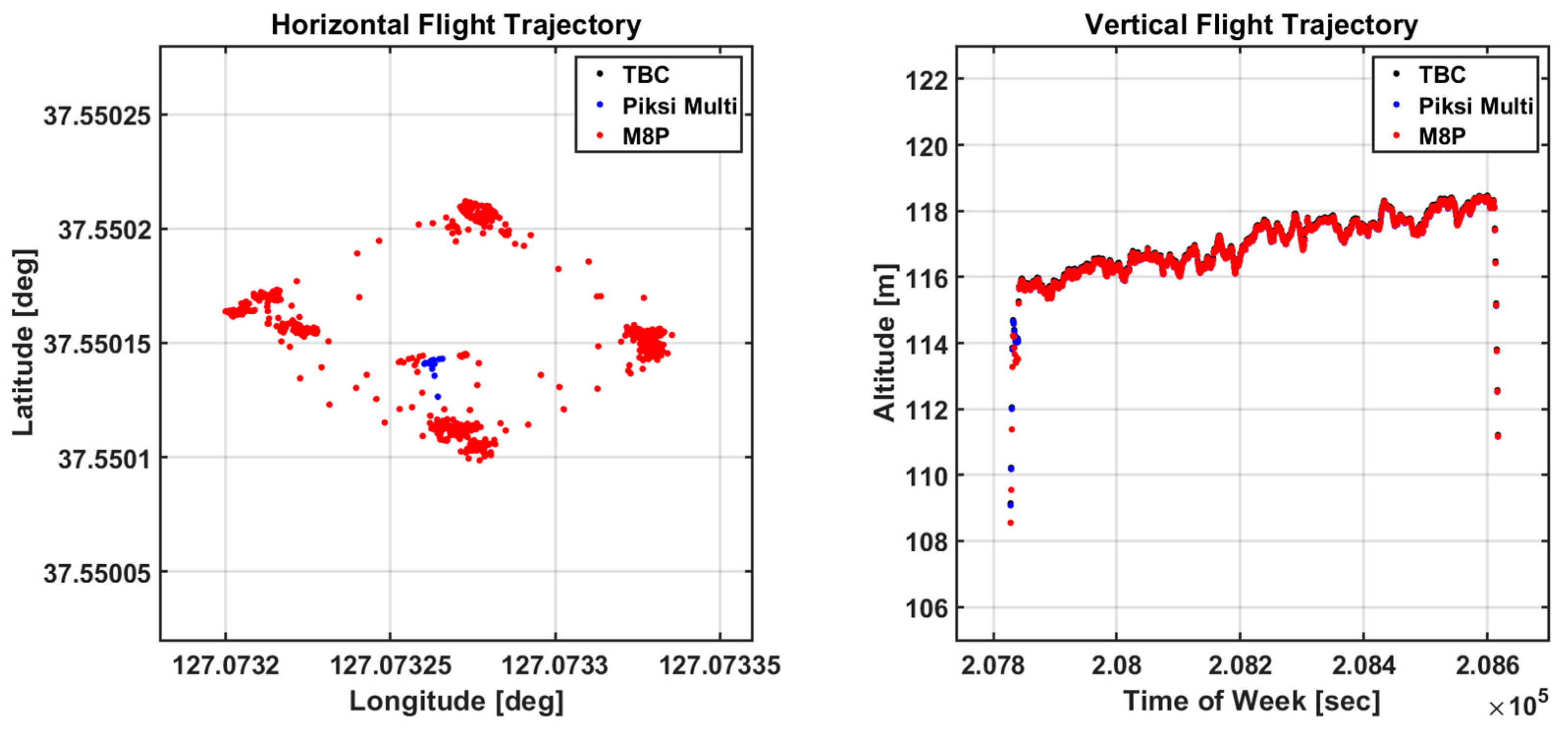
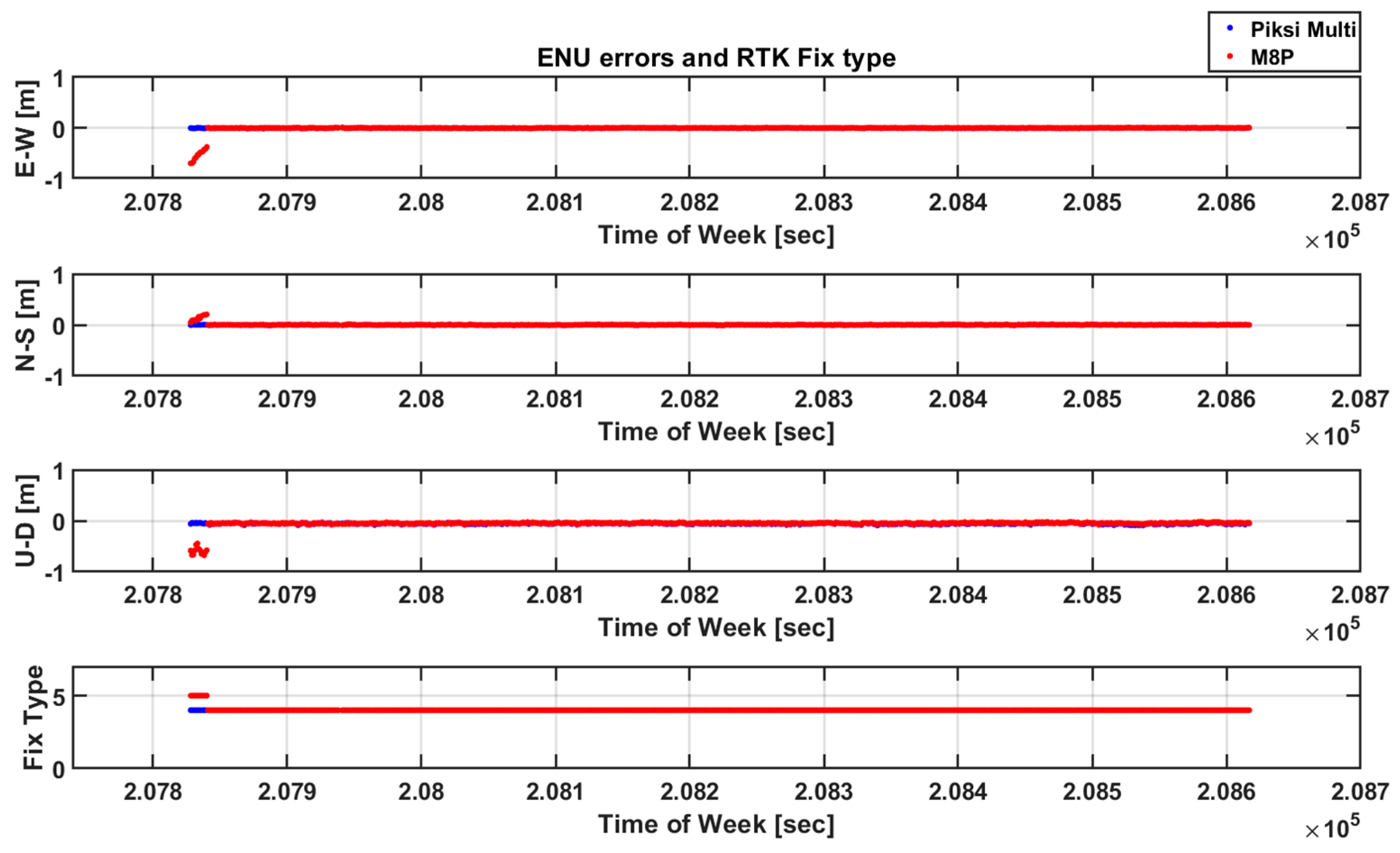
4.4.1. Scenario I: RTK Performance of Different Receivers
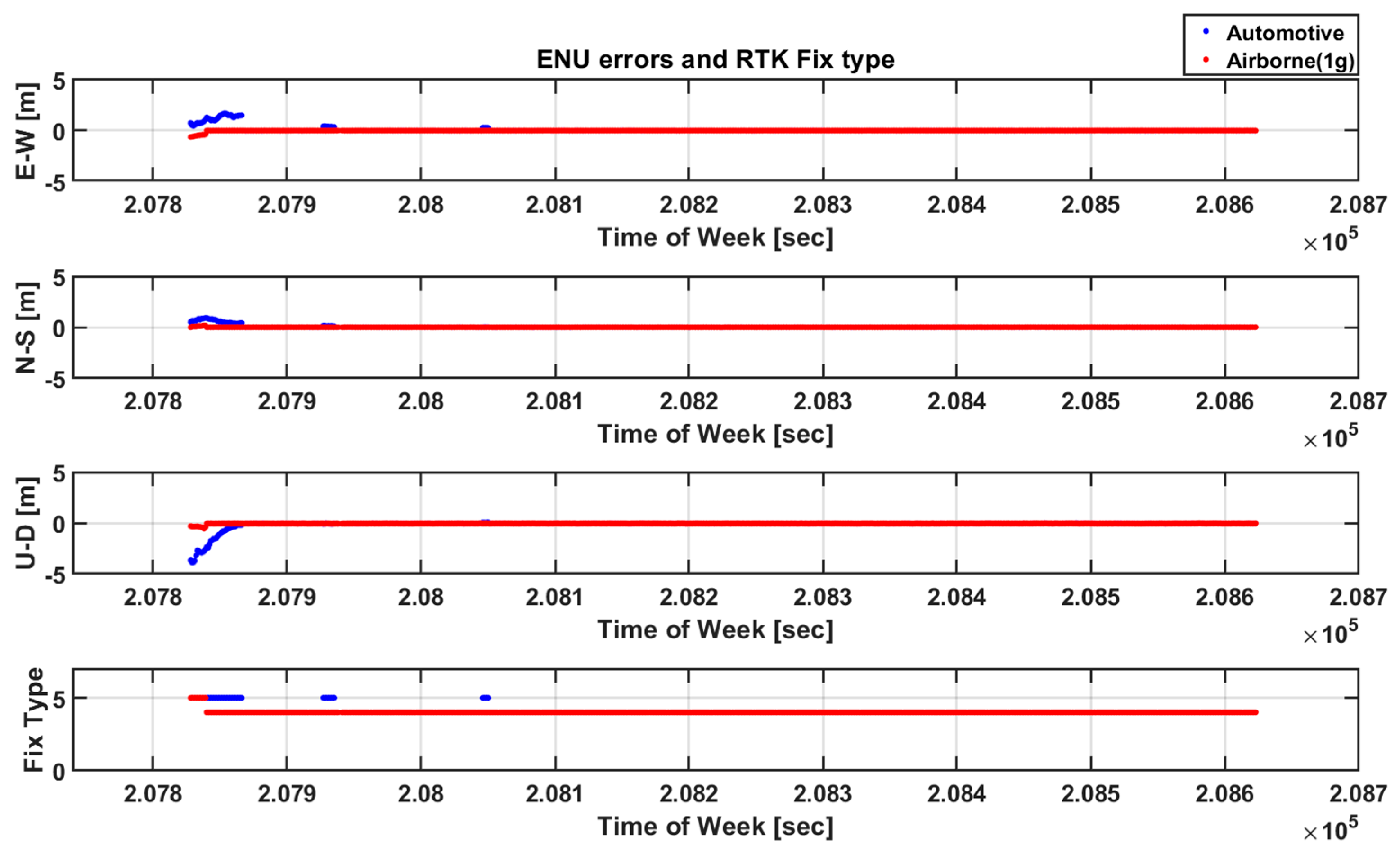
4.4.2. Scenario II: RTK Performance of Different Position Modes
4.4.3. Scenario III: RTK Performance of Different Constellations with Tropospheric Effects
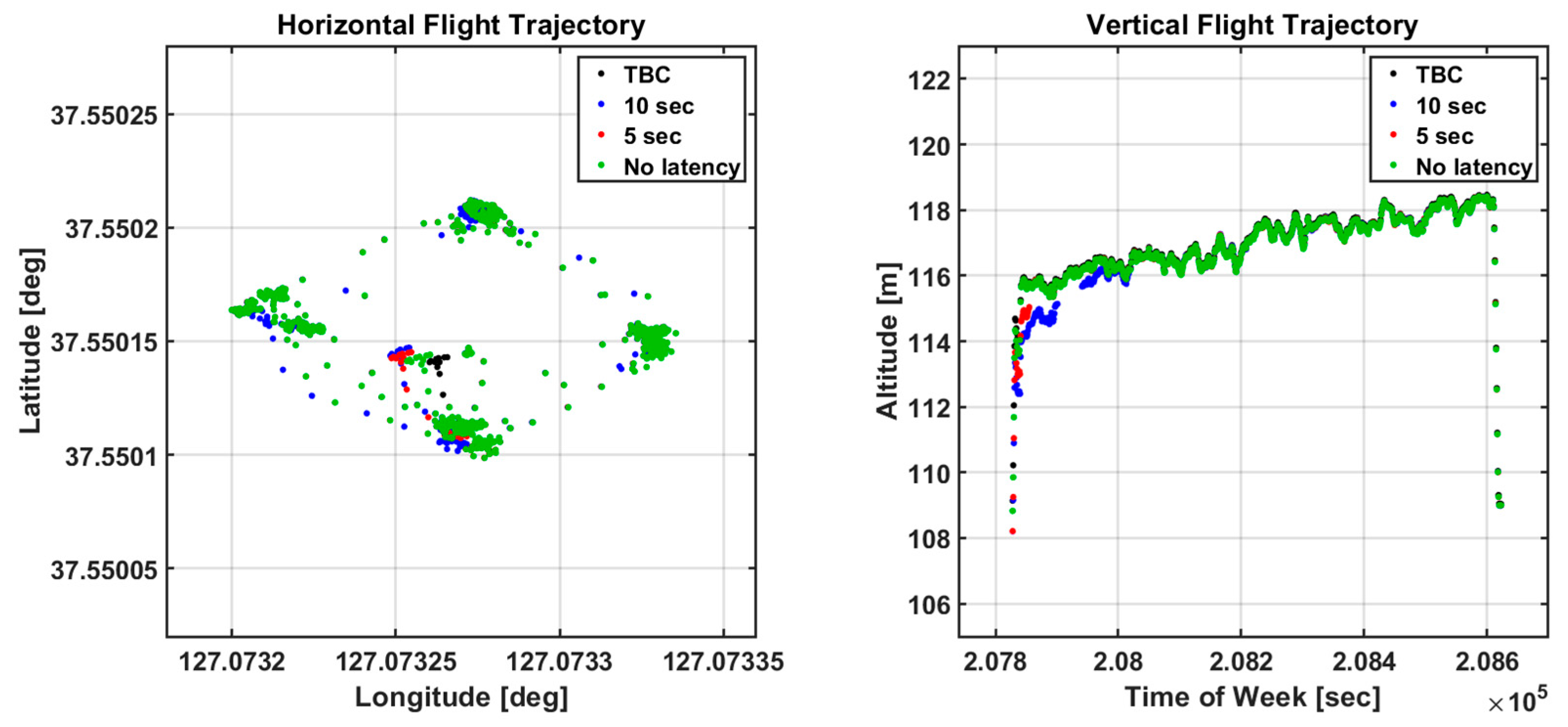
4.4.4. Scenario IV: Performance of RTK Fed with Old Correction Message
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Hofmann-Wellenhof, H.; Lichtenegger, H.; Wasle, E. GNSS—Global Navigation Satellite Systems; Springer: Vienna, Austria, 2008; pp. 55–85. [Google Scholar]
- Misra, P.; Enge, P. Global Positioning System: Signals, Measurements, and Performance, 2nd ed.; Ganga-Jamuna Press: Lincoln, MA, USA, 2006; pp. 147–185. [Google Scholar]
- Kaplan, E.D. Understanding GPS: Principles and Applications; Artech House: Boston, MA, USA, 1996; pp. 301–375. [Google Scholar]
- UNAVCO. UNAVCO Campaign GPS/GNSS Handbook; UNAVCO: Boulder, CO, USA, 2018; pp. 1–20. [Google Scholar]
- Kim, M.; Seo, J.; Lee, J. A Comprehensive Method for GNSS Data Quality Determination to Improve Ionospheric Data Analysis. Sensors 2014, 14, 14971–14993. [Google Scholar] [CrossRef] [PubMed]
- Seo, J.; Walter, T.; Chiou, T.-Y.; Blanch, J.; Enge, P. Evaluation of Deep Signal Fading Effects Due to Ionospheric Scintillation on GPS Aviation Receivers. In Proceedings of the Institute of Navigation GNSS, Savannah, GA, USA, 16–19 September 2008. [Google Scholar]
- Vinande, E.; Weinstein, B.; Chu, T.; Akos, D. GNSS receiver evaluation record-and-playback test methods. GPS World 2010, 21, 28–34. [Google Scholar]
- Cristodaro, C.; Ruotsalainen, L.; Dovis, F. Benefits and Limitations of the Record and Replay Approach for GNSS Receiver Performance Assessment in Harsh Scenarios. Sensors 2018, 18, 2189. [Google Scholar] [CrossRef] [PubMed]
- Hadas, T.; Kazmierski, K.; Sośnica, K. Performance of Galileo-only dual-frequency absolute positioning using the fully serviceable Galileo constellation. GPS Solut. 2019, 23, 108. [Google Scholar] [CrossRef]
- Kazmierski, K. Performance of Absolute Real-Time Multi-GNSS Kinematic Positioning. Artif. Satell. 2018, 53, 75–88. [Google Scholar] [CrossRef]
- RACELOGIC. LabSat 3 Wideband. Available online: https://www.labsat.co.uk/index.php/en/products/labsat-3-wideband (accessed on 10 December 2019).
- RTCM Special Committee No. 104. RTCM Standard 10403.1. Radio Technical Commission for Maritime Services; RTCM Special Committee: Arlington, VA, USA, 2011; pp. 378–383. [Google Scholar]
- RTCM Special Committee No. 104. RTCM Standard 10402.3. Radio Technical Commission for Maritime Services; RTCM Special Committee: Arlington, VA, USA, 2010. [Google Scholar]
- Parkinson, B.W.; Enge, P. Differential GPS. In Global Positioning System: Theory and Applications; Parkinson, B.W., Spilker, J.J., Axelrad, P., Enge, P., Eds.; AIAA: Washington, DC, USA, 1996; pp. 3–50. [Google Scholar]
- Park, B.; Kim, J.; Kee, C.; Cleveland, A.; Parsons, M.; Wolfe, D.; Kalafus, R. RRC Unnecessary for DGPS Messages. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 1149–1160. [Google Scholar] [CrossRef]
- Park, B. A Study on Reducing Temporal and Spatial Decorrelation Effect in GNSS Augmentation System: Consideration of the Correction Message Standardization. Ph.D. Thesis, Seoul National University, Seoul, Korea, 2008. [Google Scholar]
- Lo Presti, L.; Falletti, E.; Nicola, M.; Troglia Gamba, M. Software Defined Radio Technology for GNSS Receivers. In Proceedings of the IEEE Metrology for Aerospace (MetroAeroSpace), Benevento, Italy, 29–30 May 2014; pp. 314–319. [Google Scholar]
- Dimc, F.; Bažec, M.; Borio, D.; Gioia, C.; Baldini, G.; Basso, M. An Experimental Evaluation of Low-Cost GNSS Jamming Sensors. J. Inst. Navig. 2017, 64, 93–109. [Google Scholar] [CrossRef]
- Borio, D.; Gioia, C. A Sum-of-Squares Approach to GNSS Spoofing Detection. IEEE Trans. Aerosp. Electron. Syst. 2016, 52, 1756–1768. [Google Scholar] [CrossRef]
- Borio, D.; Gioia, C.; Baldini, G.; Giuliani, R. A Real-time SDR Sanitizer for GNSS Interference Mitigation in Road Transportation. In Proceedings of the 24th International Electrotechnical and Computer Science Conference ERK 2015, Bernardin, Portoroz, Slovenia, 21–23 September 2015. [Google Scholar]
- Hünerbein, K.; Lange, W.R. Testing Acquisition of GPS/GNSS Location and Velocity to Improve Safety in Autonomous Driving. In Proceedings of the European Test and Telemetry Conference, Nürnberg, Germany, 26–28 June 2018. [Google Scholar]
- Kouba, J.; Héroux, P. Precise Point Positioning Using IGS Orbit and Clock Products. GPS Solut. 2011, 5, 12–28. [Google Scholar] [CrossRef]
- Kee, C.; Parkinson, B.W.; Axelrad, P. Wide Area Differential GPS. In Proceedings of the 3rd International Technical Meeting of the Satellite Division of the Institute of Navigation, Colorado Spring, CO, USA, 19–21 September 1990; pp. 587–598. [Google Scholar]
- Park, B.; Kee, C. The Compact Network RTK Method: An Effective Solution to Reduce GNSS Temporal and Spatial Decorrelation Error. J. Navig. 2010, 63, 343–362. [Google Scholar] [CrossRef]
- Kim, J.; Song, J.; No, H.; Han, D.; Kim, D.; Park, B.; Kee, C. Accuracy Improvement of DGPS for Low-Cost Single-Frequency Receiver Using Modified Flächen Korrektur Parameter Correction. ISPRS Int. J. Geo Inf. 2017, 6, 222. [Google Scholar] [CrossRef]
- Song, J.; Park, B.; Kee, C. Comparative Analysis of Height-Related Multiple Correction Interpolation Methods with Constraints for Network RTK in Mountainous Areas. J. Navig. 2016, 69, 991–1010. [Google Scholar] [CrossRef]
- NTRIP—Networked Transport of RTCM via Internet Protocol. Available online: https://igs.bkg.bund.de/ntrip/about (accessed on 13 October 2019).
- Spirent. GNSS Record and Playback: Four Test Needs that Demand Richer Real World Testing, Spirent eBook. Available online: https://www.spirent.com/assets/eb/eb_four-test-needs-that-demand-richer-real-world-testing?submited=Y (accessed on 13 October 2019).
- European Space Agency. Atomic Time. Available online: https://gssc.esa.int/navipedia/index.php/Atomic_Time (accessed on 13 October 2019).
- NMEA Data. Available online: https://www.gpsinformation.org/dale/nmea.htm (accessed on 24 May 2019).
- RINEX. The Receiver Independent Exchange Format. Available online: ftp://igs.org/pub/data/format/rinex301.pdf (accessed on 13 October 2019).
- Trimble Geospatial. Trimble Business Center. Available online: https://geospatial.trimble.com/products-and-solutions/trimble-business-center (accessed on 13 October 2019).



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| GNSS Receiver | RMS | Max. |
|---|---|---|
| NovAtel FlexPak6 | 0.0011 m | 0.0089 m |
| u-blox M8P | 0.0014 m | 0.0157 m |
| Diagonal Size | 350 mm |
|---|---|
| Weight | 1.28 kg |
| Max Ascent Speed | 5 m/s |
| Max Descent Speed | 3 m/s |
| Max Speed | 57.6 km/h |
| Max Flight Time | Approx. 23 min |
| Max Tilt Angle | 35° |
| Max Transmission Distance | 3.5–5 km |
| SwiftNav Piksi Multi | u-blox EVK-6 | u-blox M8P | ||
|---|---|---|---|---|
| RMS | East | 0.8947 m | 1.0870 m | 0.8400 m |
| North | 0.7828 m | 1.0204 m | 0.7163 m | |
| Up | 4.3090 m | 1.6958 m | 2.4837 m | |
| Max. | East | 2.5083 m | 4.4078 m | 1.1333 m |
| North | 2.6784 m | 5.7743 m | 1.6973 m | |
| Up | 9.0660 m | 5.3500 m | 3.3260 m |
| u-blox EVK-6 | ||
|---|---|---|
| RMS | East | 0.8139 m |
| North | 0.8039 m | |
| Up | 0.9259 m | |
| Max. | East | 4.8190 m |
| North | 5.2008 m | |
| Up | 3.7500 m |
| SwiftNav Piksi Multi | u-blox M8P | ||
|---|---|---|---|
| RMS | East | 0.0046 m | 0.0047 m |
| North | 0.0042 m | 0.0034 m | |
| Up | 0.0566 m | 0.0479 m | |
| Max. | East | 0.0140 m | 0.0122 m |
| North | 0.0140 m | 0.0112 m | |
| Up | 0.0900 m | 0.0730 m | |
| RTK Fix Rate | >99.99% | 98.35% | |
| TTFF | 10 s | 14 s |
| Automotive | Airborne | ||
|---|---|---|---|
| RMS | East | 0.0052 m | 0.0047 m |
| North | 0.0042 m | 0.0035 m | |
| Up | 0.0458 m | 0.0473 m | |
| Max. | East | 0.0153 m | 0.0130 m |
| North | 0.0132 m | 0.0110 m | |
| Up | 0.0780 m | 0.0730 m | |
| RTK Fix Rate | 93.32% | 98.49% | |
| TTFF | 40 s | 13 s |
| GPS Only (Tropo. on) | GPS Only (Tropo. off) | GPS+GLO (Tropo. on) | GPS+GLO (Tropo. off) | ||
|---|---|---|---|---|---|
| RMS | East | 0.0053 m | 0.0056 m | 0.0065 m | 0.0065 m |
| North | 0.0040 m | 0.0040 m | 0.0038 m | 0.0037 m | |
| Up | 0.0599 m | 0.0611 m | 0.0594 m | 0.0581 m | |
| Max. | East | 0.0191 m | 0.0135 m | 0.0189 m | 0.0139 m |
| North | 0.0116 m | 0.0123 m | 0.0110 m | 0.0129 m | |
| Up | 0.0970 m | 0.0890 m | 0.1110 m | 0.0850 m | |
| RTK Fix Rate | 98.61% | 96.40% | 99.54% | 97.80% | |
| TTFF | 13 s | 32 s | 5 s | 20 s |
| No Latency | 5 s | 10 s | ||
|---|---|---|---|---|
| RMS | East | 0.0049 m | 0.0049 m | 0.0073 m |
| North | 0.0035 m | 0.0065 m | 0.0100 m | |
| Up | 0.0468 m | 0.0467 m | 0.0484 m | |
| Max. | East | 0.0130 m | 0.0154 m | 0.0217 m |
| North | 0.0110 m | 0.0223 m | 0.0302 m | |
| Up | 0.0730 m | 0.0840 m | 0.1090 m | |
| RTK Fix Rate | 98.49% | 96.47% | 80.98% | |
| TTFF | 13 s | 29 s | 75 s |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lim, C.; Yoon, H.; Cho, A.; Yoo, C.-S.; Park, B. Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test. Electronics 2019, 8, 1518. https://doi.org/10.3390/electronics8121518
Lim C, Yoon H, Cho A, Yoo C-S, Park B. Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test. Electronics. 2019; 8(12):1518. https://doi.org/10.3390/electronics8121518
Chicago/Turabian StyleLim, Cheolsoon, Hyojung Yoon, Am Cho, Chang-Sun Yoo, and Byungwoon Park. 2019. "Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test" Electronics 8, no. 12: 1518. https://doi.org/10.3390/electronics8121518
APA StyleLim, C., Yoon, H., Cho, A., Yoo, C.-S., & Park, B. (2019). Dynamic Performance Evaluation of Various GNSS Receivers and Positioning Modes with Only One Flight Test. Electronics, 8(12), 1518. https://doi.org/10.3390/electronics8121518