A Recent Electronic Control Circuit to a Throttle Device




Abstract
1. Introduction
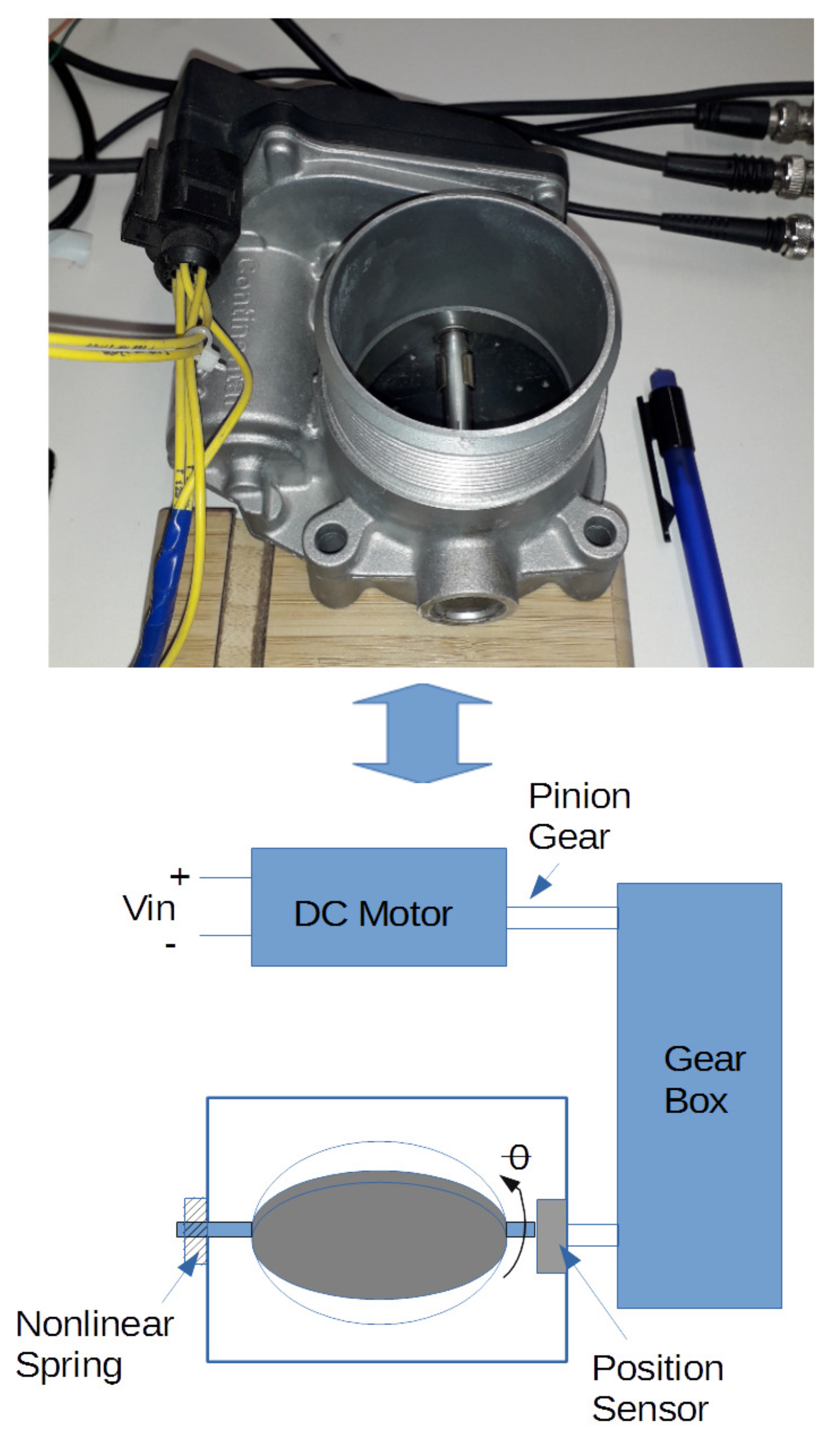
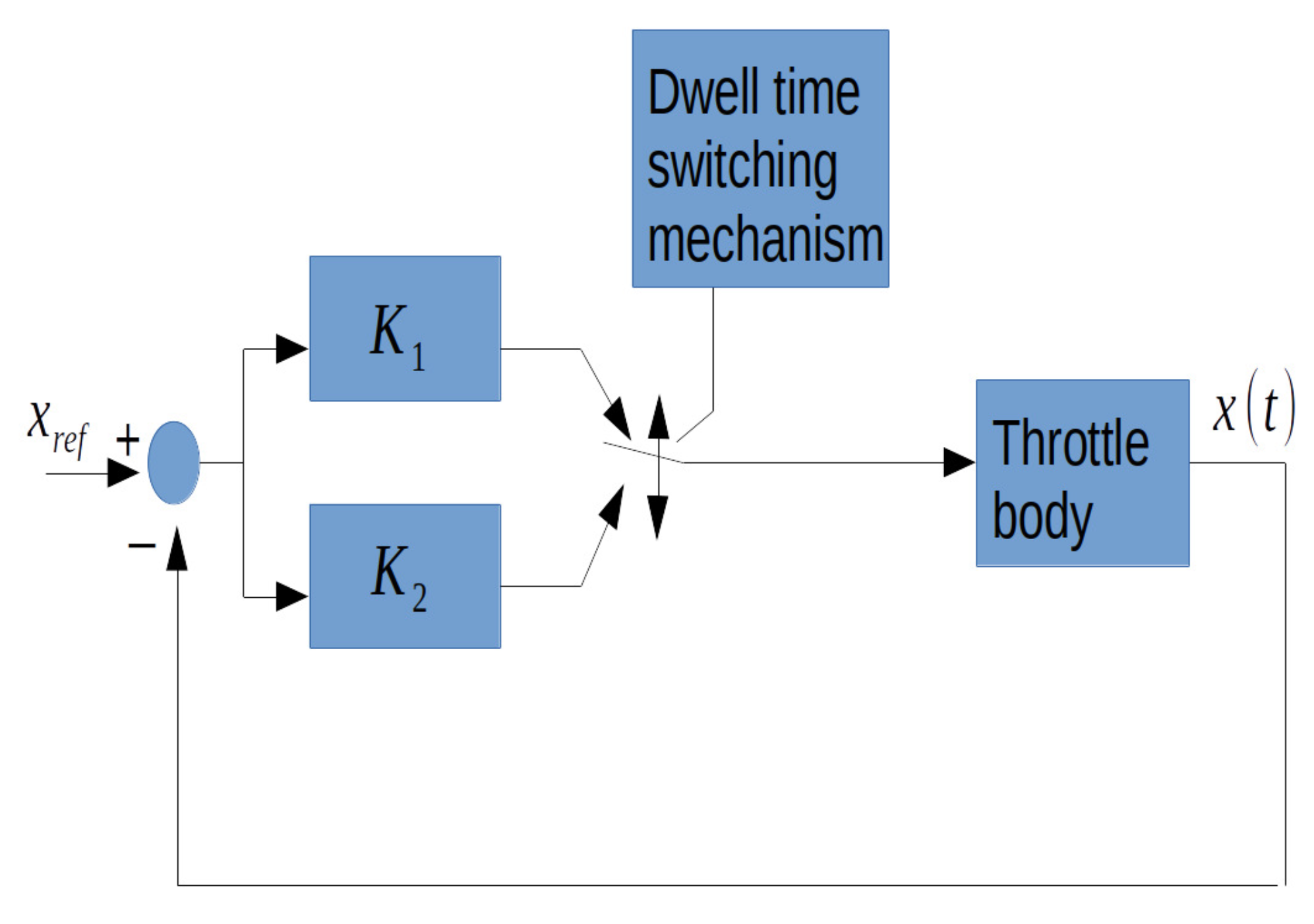
2. Theoretical Framework of the Electronic Control Circuit Design for the Mechanical Throttle System and the Main Control Problem Statement
Remarks on the Mathematical Model of the Throttle Mechanism
- The throttle mechanical dynamic friction.
- The gearbox non-linearity disturbance.
- The complex return spring torque and non-linear behavior.
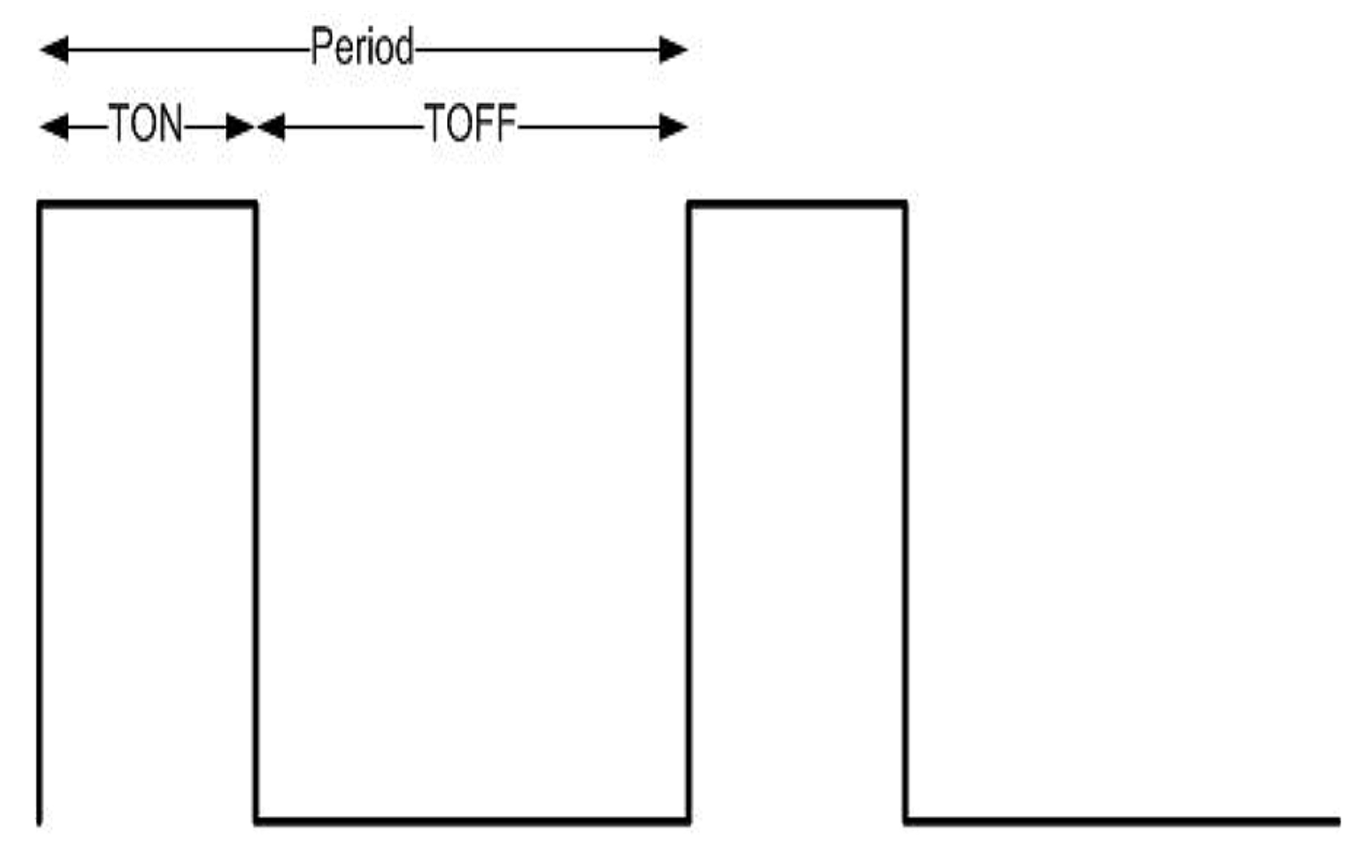
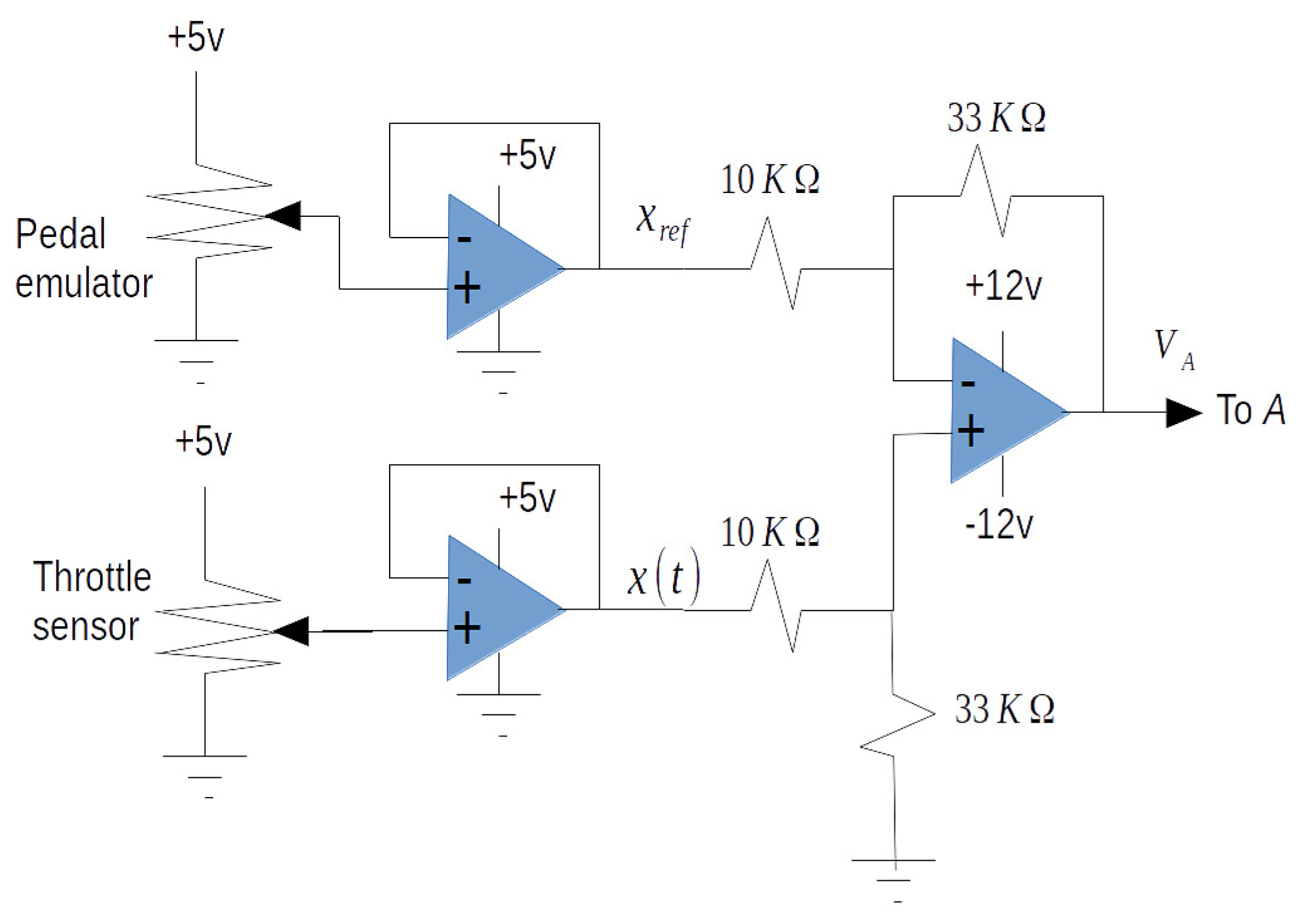
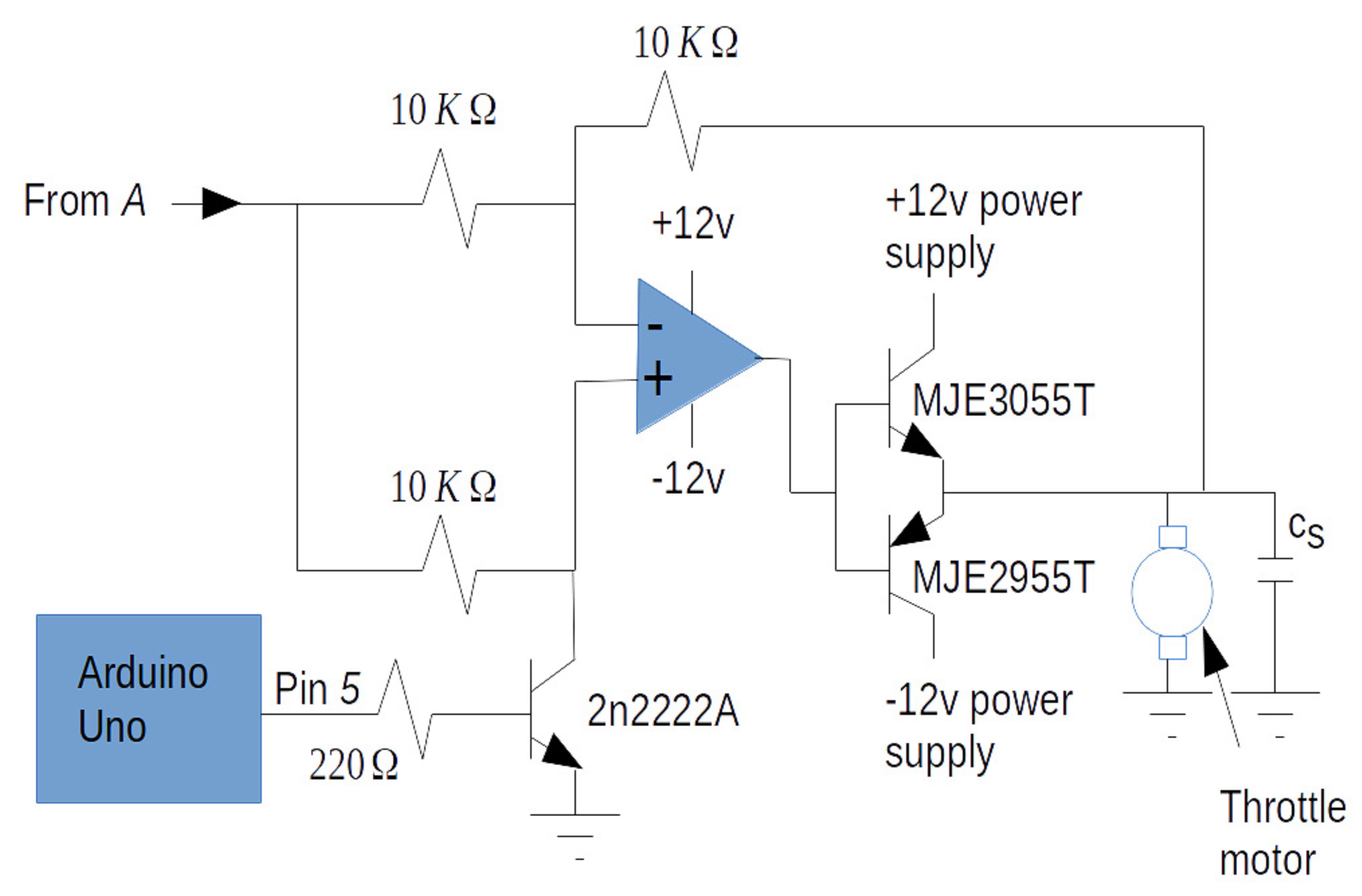
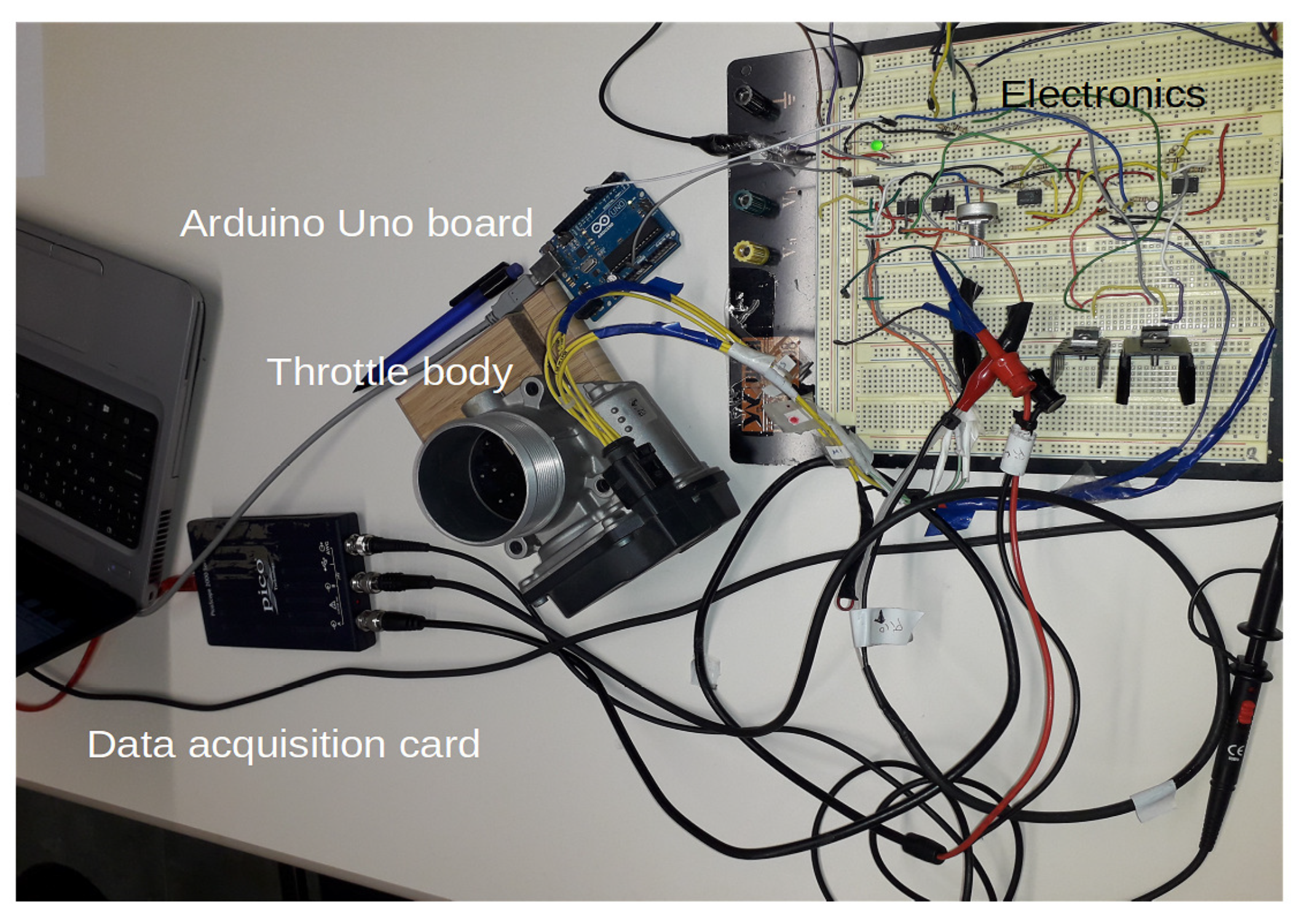
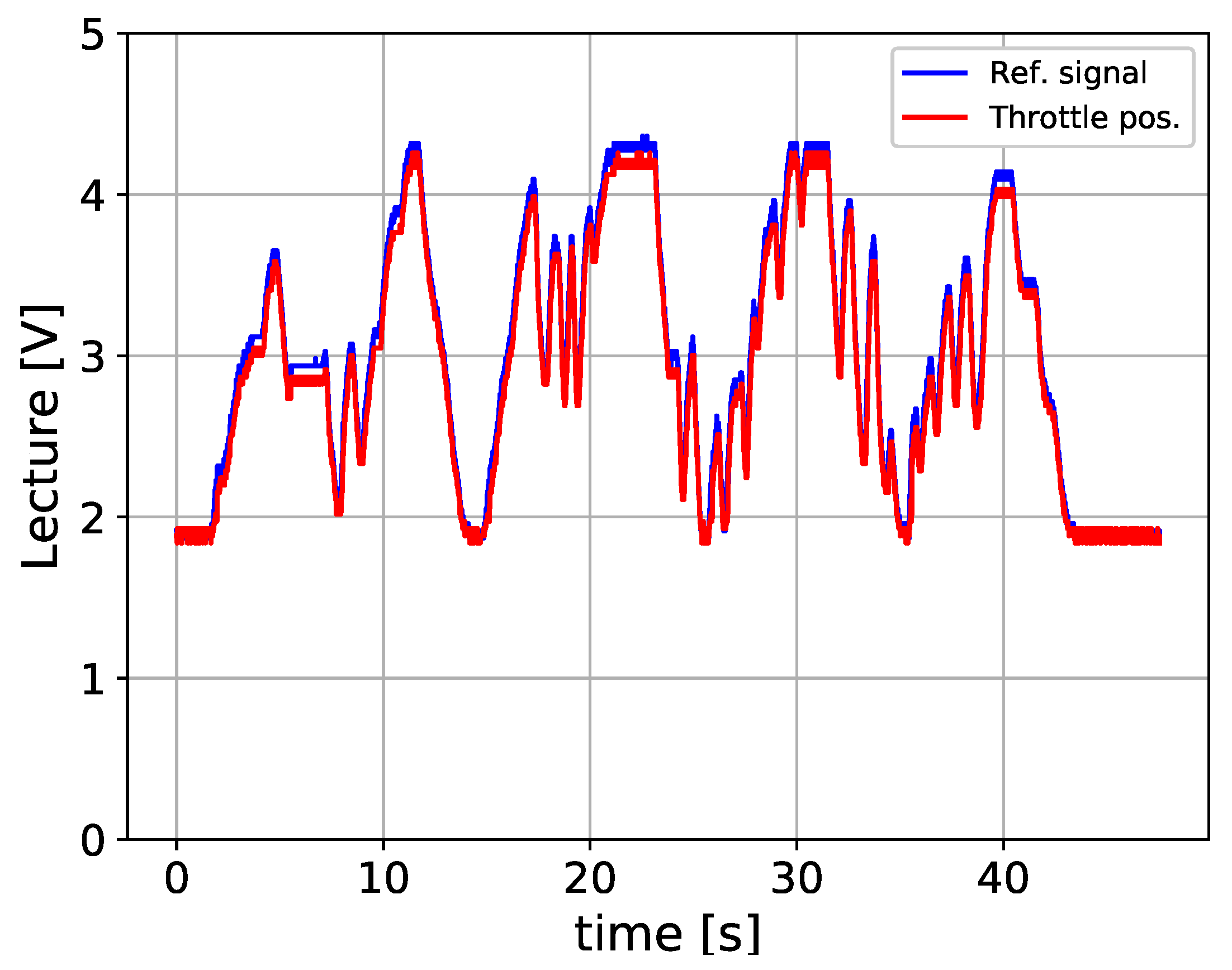
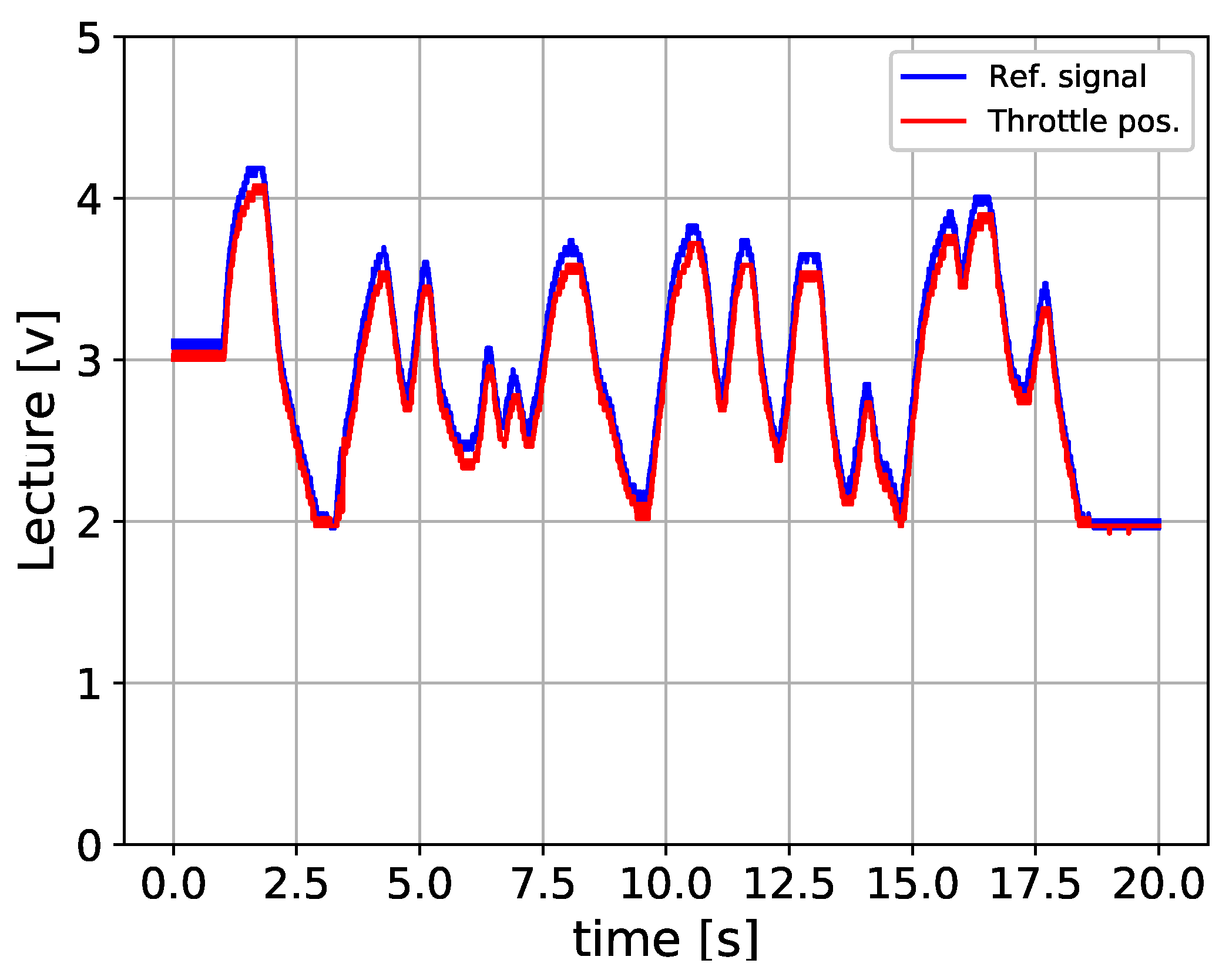
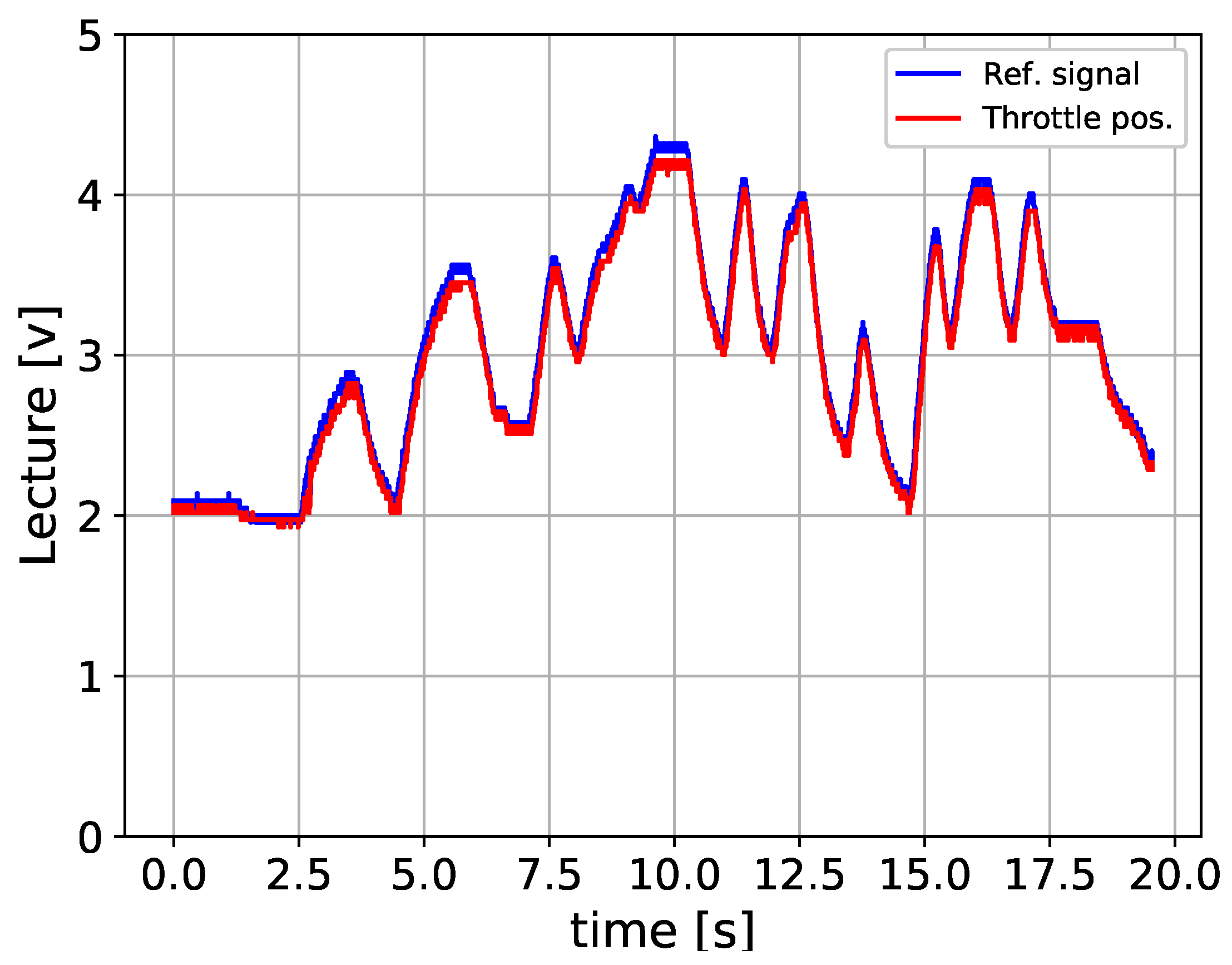
3. Electronic Control Circuit Design, Experimental Results, and Discussions
- Our control approach is well-situated for electronic realization.
- Our control design does not use a dense data flow algorithm. For instance, in [7], its basic genetic algorithm (GA) requires a fitness calculation and selecting some GA individual objects.
- Our control structure has fewer control parameters to tune. For instance, in [7], there are 14 parameters to adjust.
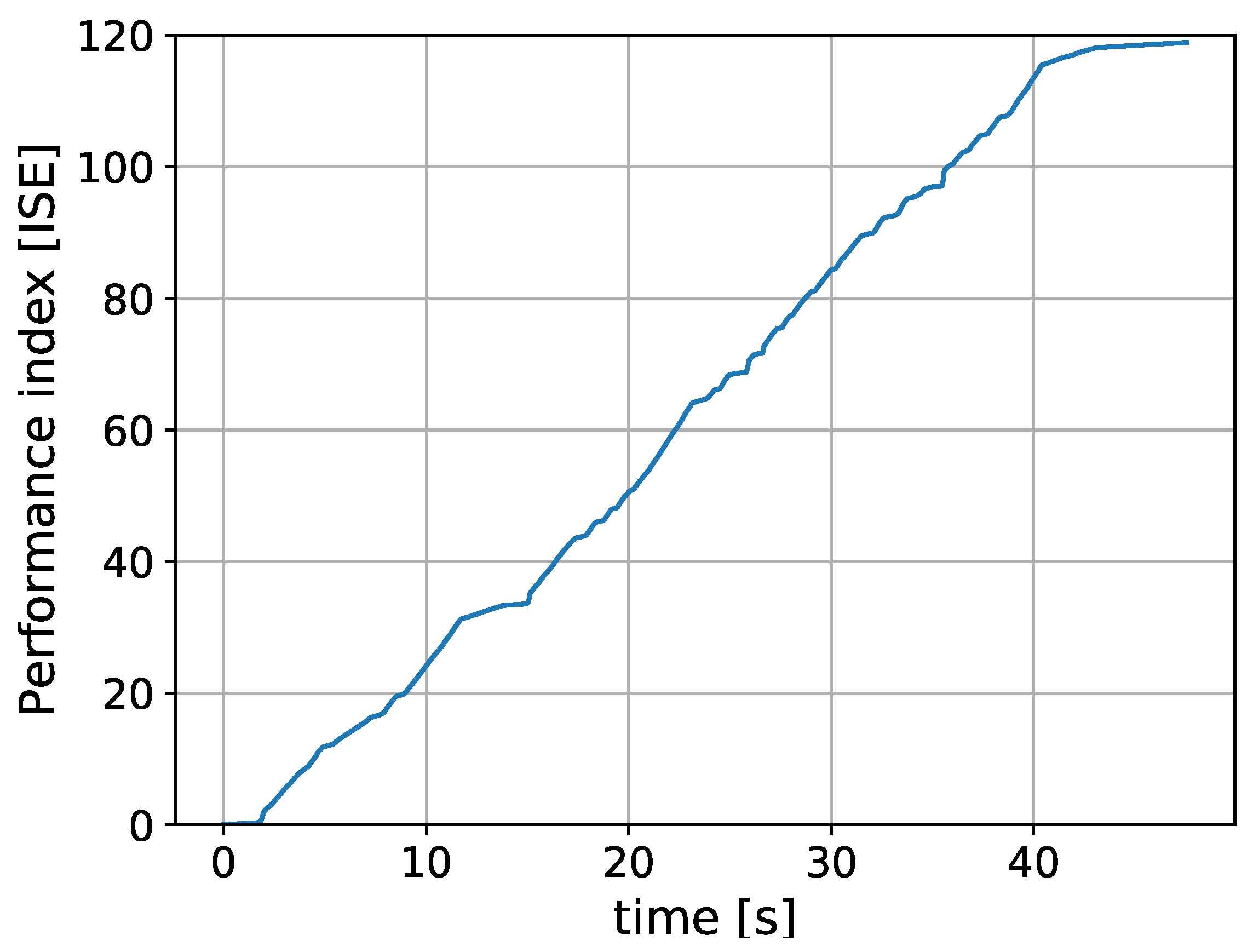
- In [7], the next performance index on the tracking error during the experiment-time action can be read as:However, in other experiments realized in [7], this error was about Rad. In our case, we have:The above number could be a disadvantage of our control design. However, a human outer-control loop exists in real automotive control driving to overcome this disadvantage.
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Liberzon, D. Switching in Systems and Control; Springer Science & Business Media: New York, NY, USA, 2003. [Google Scholar]
- Skafidas, E.; Evans, R.J.; Savkin, A.V.; Petersen, I.R. Stability results for switched controller systems. Automatica 1999, 35, 553–564. [Google Scholar] [CrossRef]
- Zhai, G.; Hu, B.; Yasuda, K.; Michel, A.N. Piecewise Lyapunov functions for switched systems with average dwell time. Asian J. Control 2000, 2, 192–197. [Google Scholar] [CrossRef]
- Zhai, G.; Li, W.; Huang, C.; Xiao, M. Quadratic Stabilization of Uncertain Switched Affine Systems: An Observer-Based Approach. In Proceedings of the IEEE 2018 57th Annual Conference of the Society of Instrument and Control Engineers of Japan (SICE), Nara, Japan, 11–14 September 2018; pp. 362–367. [Google Scholar]
- Li, J.; Pan, K.; Zhang, D.; Su, Q. Robust fault detection and estimation observer design for switched systems. Nonlinear Anal. Hybrid Syst. 2019, 34, 30–42. [Google Scholar] [CrossRef]
- Xiong, J.; Sun, Z. An improved combined switching strategy for switched linear systems. In Proceedings of the 2010 IEEE 26-th Convention of Electrical and Electronics Engineers in Israel, Eliat, Israel, 17–20 November 2010; pp. 406–410. [Google Scholar]
- Ye, M.; Wang, H. A Robust Adaptive Chattering-free Sliding Mode Control Strategy for Automotive Electronic Throttle System via Genetic Algorithm. IEEE Access 2019, 8, 68–80. [Google Scholar] [CrossRef]
- Vargas, A.N.; Menegaz, H.M.; Ishihara, J.Y.; Acho, L. Unscented Kalman filters for estimating the position of an automotive electronic throttle valve. IEEE Trans. Veh. Technol. 2016, 65, 4627–4632. [Google Scholar] [CrossRef]
- Vidal Seguí, Y.; Acho Zuppa, L.; Pozo Montero, F. Robust control of an electronic throttle system via switched chattering control: Benchmark experiments. In IFAC Workshop on Engine and Powertrain Control, Simulation and Modeling; IFAC: Paris, France, 2009. [Google Scholar]
- Pujol, G.; Vidal, Y.; Acho, L.; Vargas, A.N. Asymmetric modelling and control of an electronic throttle. Int. J. Numer. Model. Electron. Netw. Devices Fields 2016, 29, 192–204. [Google Scholar] [CrossRef]
- Acho, L. A proportional plus a hysteretic term control design: a throttle experimental emulation to wind turbines pitch control. Energies 2019, 12, 1961. [Google Scholar] [CrossRef]
- Pavković, D.; Deur, J.; Jansz, M.; Perić, N. Adaptive control of automotive electronic throttle. Control. Eng. Pract. 2006, 14, 121–136. [Google Scholar] [CrossRef]
- Xiaofang, Y.; Yaonan, W.; Wei, S.; Lianghong, W. RBF networks-based adaptive inverse model control system for electronic throttle. IEEE Trans. Control. Syst. Technol. 2009, 18, 750–756. [Google Scholar] [CrossRef]
- Li, Y.; Yang, B.; Zheng, T.; Li, Y.; Cui, M.; Peeta, S. Extended-state-observer-based double-loop integral sliding-mode control of electronic throttle valve. IEEE Trans. Intell. Transp. Syst. 2015, 16, 2501–2510. [Google Scholar] [CrossRef]
- Muske, K.R.; Jones, J.C.P.; Franceschi, E. Adaptive analytical model-based control for SI engine air–fuel ratio. IEEE Trans. Control. Syst. Technol. 2008, 16, 763–768. [Google Scholar] [CrossRef]
- Sheng, W.; Bao, Y. Fruit fly optimization algorithm based fractional order fuzzy-PID controller for electronic throttle. Nonlinear Dyn. 2013, 73, 611–619. [Google Scholar] [CrossRef]
- Honek, M.; Wojnar, S.; Simoncic, P.; Rohar-Hkiv, B. Control of electronic throttle valve position of SI engine. In Proceedings of the International Conference February, Vyšná Boca, Slovak, 10–13 February 2010; Volume 10, p. 13. [Google Scholar]
- Jiao, X.; Zhang, J.; Shen, T. An adaptive servo control strategy for automotive electronic throttle and experimental validation. IEEE Trans. Ind. Electron. 2014, 61, 6275–6284. [Google Scholar] [CrossRef]
- Hu, Y.; Wang, H. Robust tracking control for vehicle electronic throttle using adaptive dynamic sliding mode and extended state observer. Mech. Syst. Signal Process. 2020, 135, 106375. [Google Scholar] [CrossRef]
- Baotic, M.; Vasak, M.; Morari, M.; Peric, N. Hybrid system theory based optimal control of an electronic throttle. In Proceedings of the 2003 IEEE American Control Conference, Denver, CO, USA, 4–6 June 2003; Volume 6, pp. 5209–5214. [Google Scholar]
- Guerra, R.; Acho, L.; Aguilar, L. Adaptive friction compensation for mechanisms: A new perspective. Int. J. Robot. Autom. 2007, 22, 155–159. [Google Scholar] [CrossRef]
- Guerra, R.; Acho, L. Adaptive friction compensation for tracking control of mechanisms. Asian J. Control 2007, 9, 422–425. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
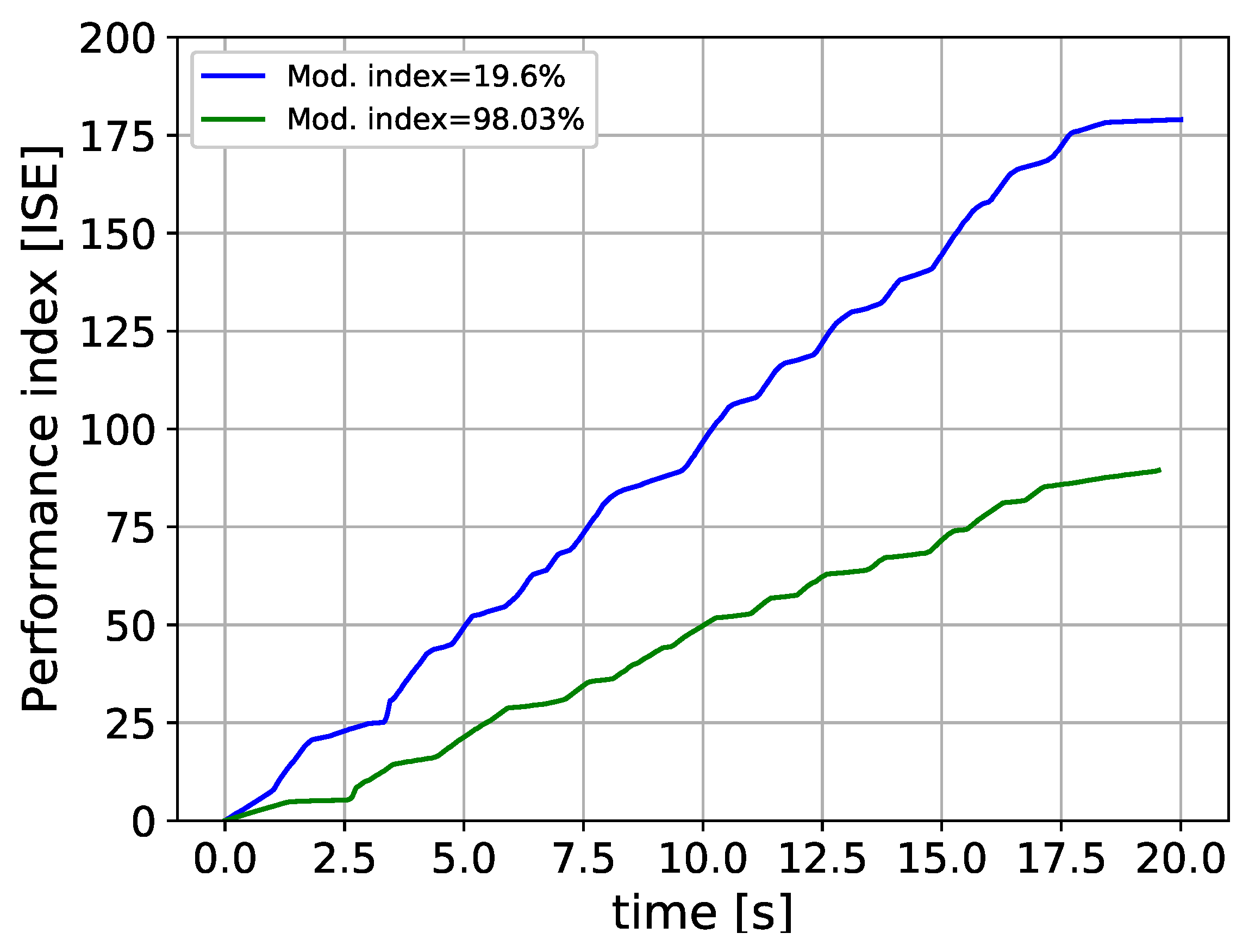
| PWM Frequency [Hz] | PWM Duty Cycle [%] | ISE |
|---|---|---|
| 976.56 | 86.27 | 119.5 |
| 7812.50 | 19.6 | 178.6 |
| 7812.50 | 98.03 | 88.8 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Acho, L.; Pujol-Vázquez, G.; Gibergans-Báguena, J. A Recent Electronic Control Circuit to a Throttle Device. Electronics 2020, 9, 191. https://doi.org/10.3390/electronics9010191
Acho L, Pujol-Vázquez G, Gibergans-Báguena J. A Recent Electronic Control Circuit to a Throttle Device. Electronics. 2020; 9(1):191. https://doi.org/10.3390/electronics9010191
Chicago/Turabian StyleAcho, Leonardo, Gisela Pujol-Vázquez, and José Gibergans-Báguena. 2020. "A Recent Electronic Control Circuit to a Throttle Device" Electronics 9, no. 1: 191. https://doi.org/10.3390/electronics9010191
APA StyleAcho, L., Pujol-Vázquez, G., & Gibergans-Báguena, J. (2020). A Recent Electronic Control Circuit to a Throttle Device. Electronics, 9(1), 191. https://doi.org/10.3390/electronics9010191