Research on the Heading Calibration for Foot-Mounted Inertial Pedestrian-Positioning System Based on Accelerometer Attitude

Abstract
:1. Introduction
2. Principle and Analysis of Foot-Mounted Inertial Pedestrian Positioning
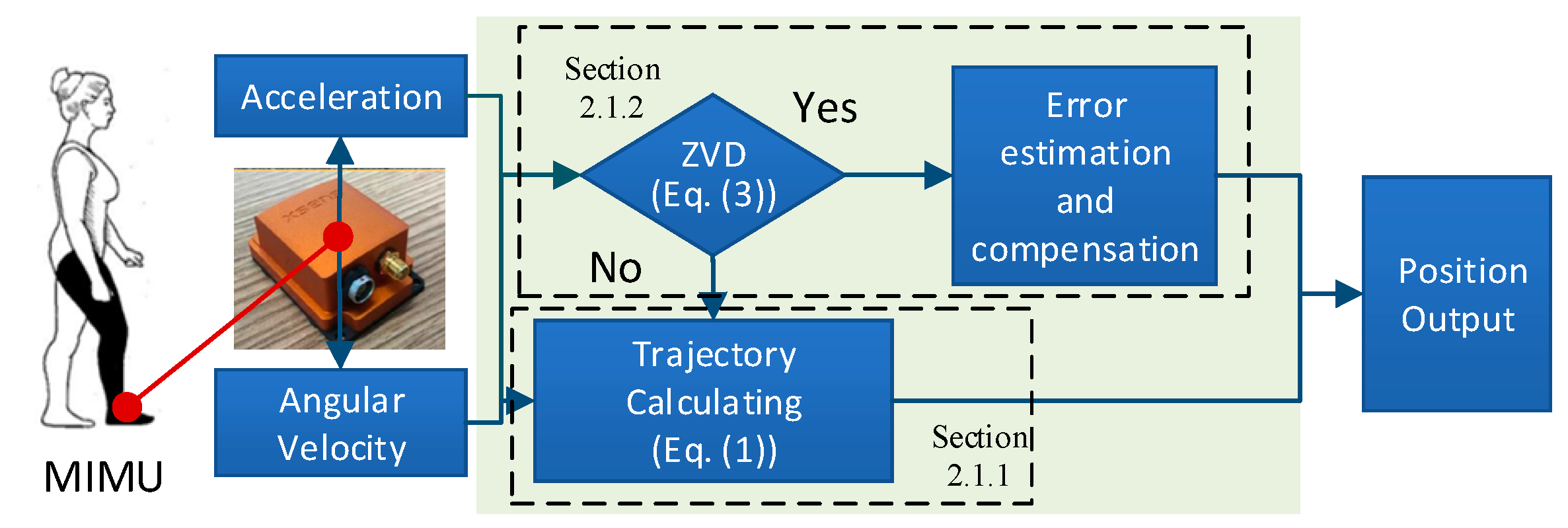
2.1. Principle of FIPP
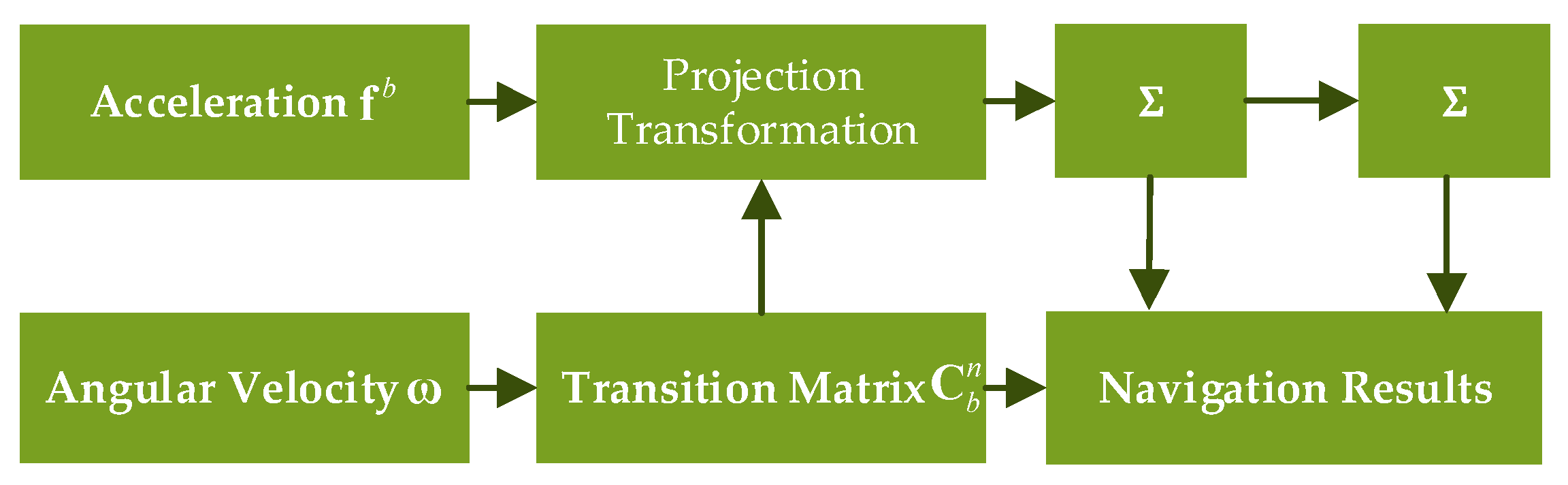
2.1.1. Trajectory Calculating
2.1.2. ZUPT Error Correction Algorithm
2.2. Heading Misalignment Angle Observability Analysis
3. FIPP based on Improved Attitude Algorithm (IAA) ZUPT
3.1. Horizontal Attitude Estimation by Accelerometer
3.2. Heading Estimation Algorithm by Accelerometer’s Horizontal Attitude
3.3. Improved Pedestrian Positioning Algorithm Based on IAA ZUPT
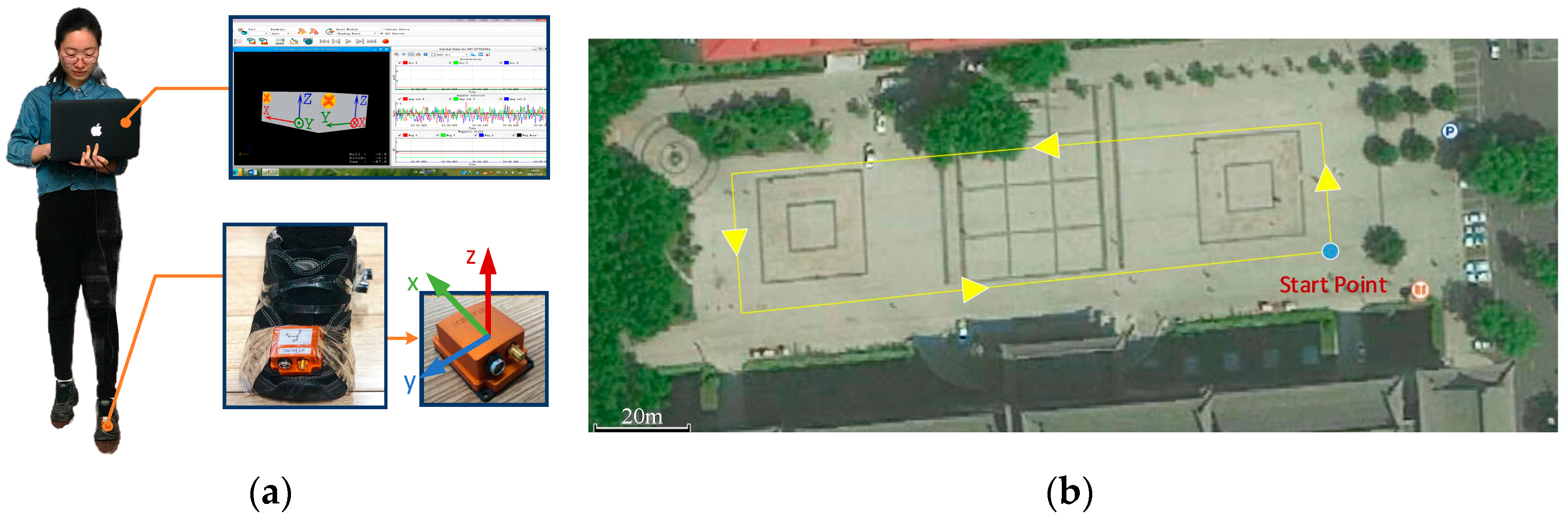
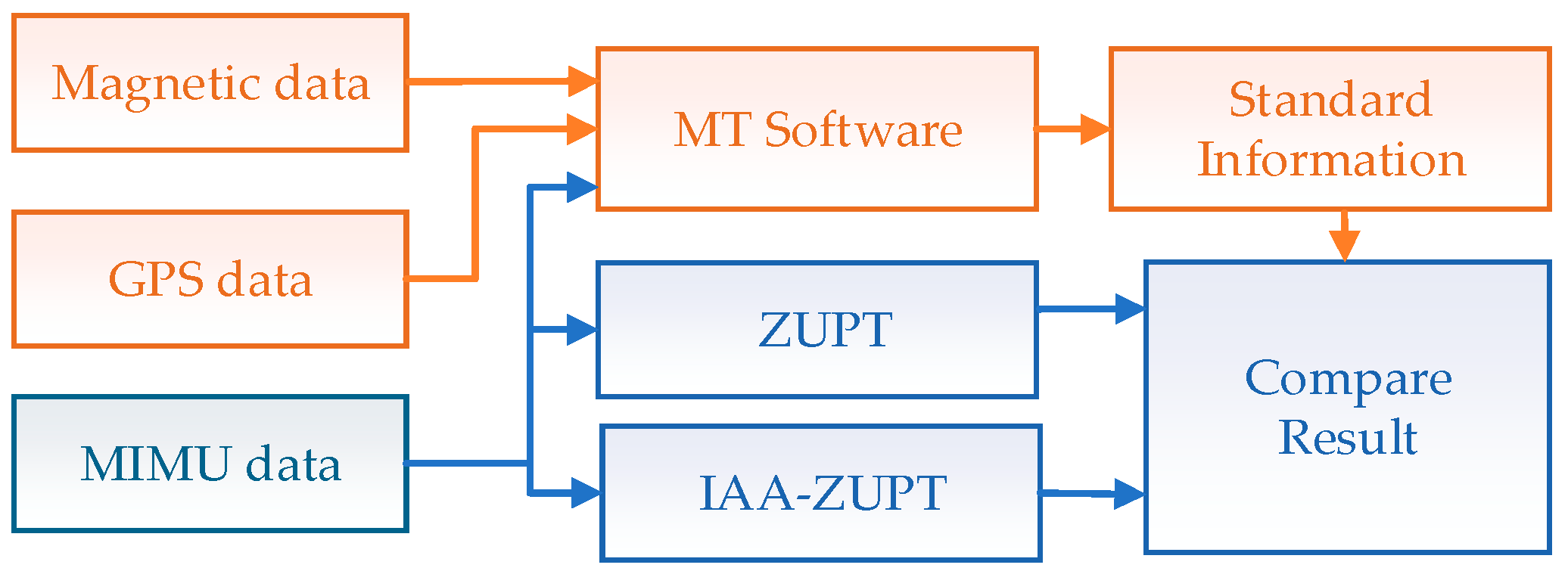
4. Performance Evaluation
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Fischer, C.; Sukumar, P.T.; Hazas, M. Tutorial: Implementing a Pedestrian Tracker Using Inertial Sensors. IEEE Pervasive Comput. 2013, 12, 17–27. [Google Scholar] [CrossRef]
- Foxlin, E. Pedestrian Tracking with Shoe-Mounted Inertial Sensors. IEEE Comput. Graph. Appl. 2005, 25, 38–46. [Google Scholar] [CrossRef] [PubMed]
- Nilsson, J.-O.; Skog, I.; Handel, P.; Hari, K.V.S. Foot-mounted inertial navigation for everybody-an open-source embedded implementation. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium (PLANS), Myrtle Beach, SC, USA, 23–26 April 2012; pp. 140–145, ISBN 978-1-4673-0387-3. [Google Scholar]
- Ojeda, L.; Borenstein, J. Non-GPS navigation for security personnel and first responders. J. Navig. 2007, 60, 391–407. [Google Scholar] [CrossRef]
- Godha, S.; Lachapelle, G. Foot mounted inertial system for pedestrian navigation. Meas. Sci. Technol. 2008, 19, 075202. [Google Scholar] [CrossRef]
- Tong, X.; Su, Y.; Li, Z.F.; Si, C.W.; Han, G.W.; Ning, J.; Yang, F.H. A Double-step Unscented Kalman Filter and HMM-based Zero Velocity Update for Pedestrian Dead Reckoning Using MEMS Sensors. IEEE Trans. Ind. Electron. 2019, 67, 581–591. [Google Scholar] [CrossRef]
- Lee, J.S.; Huang, S.M. An Experimental Heuristic Approach to Multi-Pose Pedestrian Dead Reckoning Without Using Magnetometers for Indoor Localization. IEEE Sens. J. 2019, 19, 9532–9542. [Google Scholar] [CrossRef]
- Niu, X.J.; Li, Y.; Kuang, J.; Zhang, P. Data Fusion of Dual Foot-Mounted IMU for Pedestrian Navigation. IEEE Sens. J. 2019, 19, 4577–4584. [Google Scholar] [CrossRef]
- Xia, M.; Xiu, C.D.; Yang, D.K.; Wang, L. Performance Enhancement of Pedestrian Navigation Systems Based on Low-Cost Foot-Mounted MEMS-IMU/Ultrasonic Sensor. Sensors 2019, 19, 364. [Google Scholar] [CrossRef]
- Sung, K.; Lee, H.K.; Kim, H. Pedestrian Positioning Using a Double-Stacked Particle Filter in Indoor Wireless Networks. Sensors 2019, 19, 3907. [Google Scholar] [CrossRef]
- Park, S.K.; Suh, Y.S. A Zero Velocity Detection Algorithm Using Inertial Sensors for Pedestrian Navigation Systems. Sensors 2010, 10, 9163–9178. [Google Scholar] [CrossRef]
- Skog, I.; Nilsson, J.O.; Handel, P. Evaluation of Zero-Velocity Detectors for Foot-Mounted Inertial Navigation Systems. In Proceedings of the International Conference on Indoor Positioning and Indoor Navigation, Zurich, Switzerland, 15–17 September 2010; pp. 172–173, ISBN 978-1-4244-5864-6. [Google Scholar]
- Bebek, O.; Suster, M.A.; Rajgopal, S.; Fu, M.J.; Huang, X.M.; Cavusoglu, M.C.; Young, D.J.; Mehregany, M.; van den Bogert, A.J.; Mastrangelo, C.H. Personal Navigation via High-Resolution Gait Corrected Inertial Measurement Units. IEEE Trans. Instrum. Meas. 2010, 59, 3018–3027. [Google Scholar] [CrossRef]
- Zhang, R.; Yang, H.; Hoflinger, F.; Reindl, L.M. Adaptive zero velocity update based on velocity classification for pedestrian tracking. IEEE Sens. J. 2017, 17, 2137–2145. [Google Scholar] [CrossRef]
- Jasiewicz, J.M.; Allum, J.H.J.; Middleton, J.W.; Barriskill, A.; Condie, P.; Purcell, B.; Li, R.C.T. Gait event detection using linear accelerometers or angular velocity transducers in able-bodied and spinal-cord injured individuals. Gait Posture 2006, 24, 502–509. [Google Scholar] [CrossRef] [PubMed]
- Tien, I.; Glaser, S.D.; Bajcsy, R.; Goodin, D.S.; Aminoff, M.J. Results of using a wireless inertial measuring system to quantify gait motions in control subjects. IEEE Trans. Inf. Technol. Biomed. 2010, 14, 904–915. [Google Scholar] [CrossRef]
- Sabatani, A.M.; Martelloni, C.; Scapellato, S.; Cavallo, F. Energy expenditure rate in level and uphill treadmill walking determined from empirical models and foot inertial sensing data. Electron. Lett. 2004, 40, 95–96. [Google Scholar] [CrossRef]
- Abdulrahim, K.; Hide, C.; Moore, T.; Hill, C. Aiding Low Cost Inertial Navigation with Building Heading for Pedestrian Navigation. J. Navig. 2011, 64, 219–233. [Google Scholar] [CrossRef]
- Zhao, H.; Wang, Z.Y. Motion Measurement Using Inertial Sensors, Ultrasonic Sensors, and Magnetometers with Extended Kalman Filter for Data Fusion. IEEE Sens. J. 2012, 12, 943–953. [Google Scholar] [CrossRef]
- Hu, P.D.; Xu, P.; Chen, B.X.; Wu, Q.P. A Self-Calibration Method for the Installation Errors of Rotation Axes Based on the Asynchronous Rotation of Rotational Inertial Navigation Systems. IEEE Trans. Ind. Electron. 2018, 65, 3550–3558. [Google Scholar] [CrossRef]
- Kok, M.; Schon, T.B. Magnetometer Calibration Using Inertial Sensors. IEEE Sens. J. 2016, 16, 5679–5690. [Google Scholar] [CrossRef]
- Koutsou, A.D.; Seco, F.; Jimenez, A.R.; Roa, J.O.; Ealo, J.L.; Prieto, C.; Guevara, J. Preliminary localization results with an Rfid Based Indoor Guiding System. In Proceedings of the IEEE International Symposium on Intelligent Signal Processing, Conference Proceedings Book, Alcala de Henares, Spain, 3–5 October 2007; pp. 917–922, ISBN 978-1-4244-0829-0. [Google Scholar]
- Wilson, S.; Michael, A.O.; Mlitwa, N.B.W. A state-of-the-art survey of indoor positioning and navigation systems and technologies. S. Afr. Comput. J. 2017, 29, 145–197. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G. An improved technique based on Zadoff-Chu sequences for distance measurements. In Proceedings of the 2016 IEEE Radio & Antenna Days of the Indian Ocean, St. Gilles-les-Bains, Reunion, 10–13 October 2016. [Google Scholar] [CrossRef]
- Piccinni, G.; Avitabile, G.; Coviello, G. A novel distance measurement technique for indoor positioning systems based on Zadoff-Chu Sequences. In Proceedings of the 2017 15th IEEE International New Circuits and Systems Conference, Strasbourg, France, 25–28 June 2017; pp. 337–340. [Google Scholar] [CrossRef]
- Jerabek, J.; Zaplatilek, L.; Pola, M. A proposal of radio ultrawideband systems for precision indoor localization. In Proceedings of the 2015 25th International Conference Radioelektronika, Pardubice, Czech Republic, 21–22 April 2015. [Google Scholar] [CrossRef]
- Gu, Y.; Zhou, C.F.; Wieser, A.; Zhou, Z.M. Pedestrian positioning using WiFi fingerprints and a foot-mounted inertial sensor. In Proceedings of the 2017 European Navigation Conference (ENC), Lausanne, Switzerland, 9–12 May 2017; pp. 91–99, ISBN 978-1-5090-5922-5. [Google Scholar]
- Zou, H.; Chen, Z.H.; Jiang, H.; Xie, L.H.; Spanos, C. Accurate indoor localization and tracking using mobile phone inertial sensors, WiFi and iBeacon. In Proceedings of the 2017 4th IEEE International Symposium on Inertial Sensors and Systems (INERTIAL), Laguna Beach, CA, USA, 27–30 March 2017; ISBN 978-1-5090-3233-4. [Google Scholar]
- Hsu, Y.L.; Wang, J.S.; Chang, C.W. A Wearable Inertial Pedestrian Navigation System with Quaternion-Based Extended Kalman filter for Pedestrian Localization. IEEE Sens. J. 2017, 17, 3093–3206. [Google Scholar] [CrossRef]
- Bao, S.D.; Meng, X.L.; Xiao, W.D.; Zhang, Z.Q. Fusion of Inertial/Magnetic Sensor Measurements and Map Information for Pedestrian Tracking. Sensors 2017, 17, 340. [Google Scholar] [CrossRef] [PubMed]
- Qiu, S.; Wang, Z.L.; Zhao, H.Y.; Qin, K.R.; Li, Z.L.; Hu, H.S. Inertial/magnetic sensors based pedestrian dead reckoning by means of multi-sensor fusion. Inf. Fusion 2018, 39, 108–119. [Google Scholar] [CrossRef]
- Metge, J.; Megret, R.; Giremus, A.; Berthoumieu, Y.; Decamps, T. Calibration of an inertial-magnetic measurement unit without external equipment, in the presence of dynamic magnetic disturbances. Meas. Sci. Technol. 2014, 25, 125106. [Google Scholar] [CrossRef]
- Vasconcelos, J.F.; Elkaim, G.; Silvestre, C.; Oliveira, P.; Cardeira, B. Geometric approach to strapdown magnetometer calibration in sensor frame. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 1293–1306. [Google Scholar] [CrossRef]
- Wu, Y.X.; Zou, D.P.; Liu, P.L.; Yu, W.X. Dynamic Magnetometer Calibration and Alignment to Inertial Sensors by Kalman filtering. IEEE Trans. Control Syst. Technol. 2018, 26, 716–723. [Google Scholar] [CrossRef]
- Wang, Q.Y.; Guo, Z.; Sun, Z.G.; Cui, X.F.; Liu, K.Y. Research on the Forward and Reverse Calculation Based on the Adaptive Zero-Velocity Interval Adjustment for the Foot-Mounted Inertial Pedestrian-Positioning System. Sensors 2018, 18, 1642. [Google Scholar] [CrossRef]
- Zhao, H.Y.; Wang, Z.L.; Gao, Q.; Hassan, M.M.; Alelaiwi, A. Smooth estimation of human foot motion for zero-velocity-update-aided inertial pedestrian navigation system. Sens. Rev. 2015, 35, 389–400. [Google Scholar] [CrossRef]
- Colomar, D.S.; Nilsson, J.O.; Handel, P. Smoothing for ZUPT-aided INSs. In Proceedings of the 2012 International Conference on Indoor Positioning and Indoor Navigation (IPIN), Sydney, NSW, Australia, 13–15 November 2012; pp. 15–17, ISBN 978-1-4673-1955-3; 978-1-4673-1954-6. [Google Scholar]
- Ramanandan, A.; Chen, A.N.; Farrell, J.A. Observability analysis of an inertial navigation system with stationary updates. In Proceedings of the 2011 American Control Conference, San Francisco, CA, USA, 29 June–1 July 2011; pp. 5292–5299, ISBN 978-1-4577-0081-1. [Google Scholar]
- Eduardo, N.; Hugh, D.W. Initial calibration and alignment of low-cost inertial navigation units for land vehicle applications. J. Field Robot. 1999, 16, 81–92. [Google Scholar] [CrossRef]
- MTi 10-Series and MTi 100-Series; Xsens Technologies B.V.: Enschede, The Netherlands, 2015.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sensors | Typical | ||
|---|---|---|---|
| Gyro | Bias repeatability | [deg/s] | 0.2 |
| Noise density | [deg/s] | 0.01 | |
| Standard full range | [deg/s] | 450 | |
| Acc | Bias repeatability | [m/s2] | 0.03 |
| Noise density | [μg/√Hz] | 80 | |
| Standard full range | [m/s2] | 200 | |
| No. | Person | Average Velocity (m/s) | Walking Type | Figure |
|---|---|---|---|---|
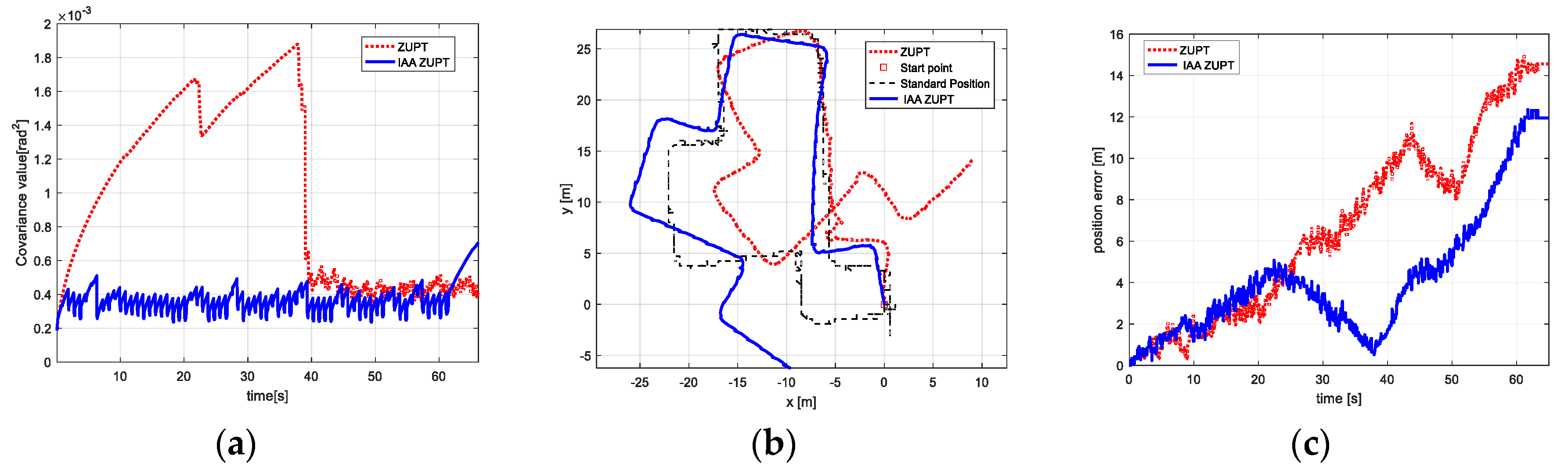
| 1 | A | 0.870 | NW 1 | Figure 10a–c |
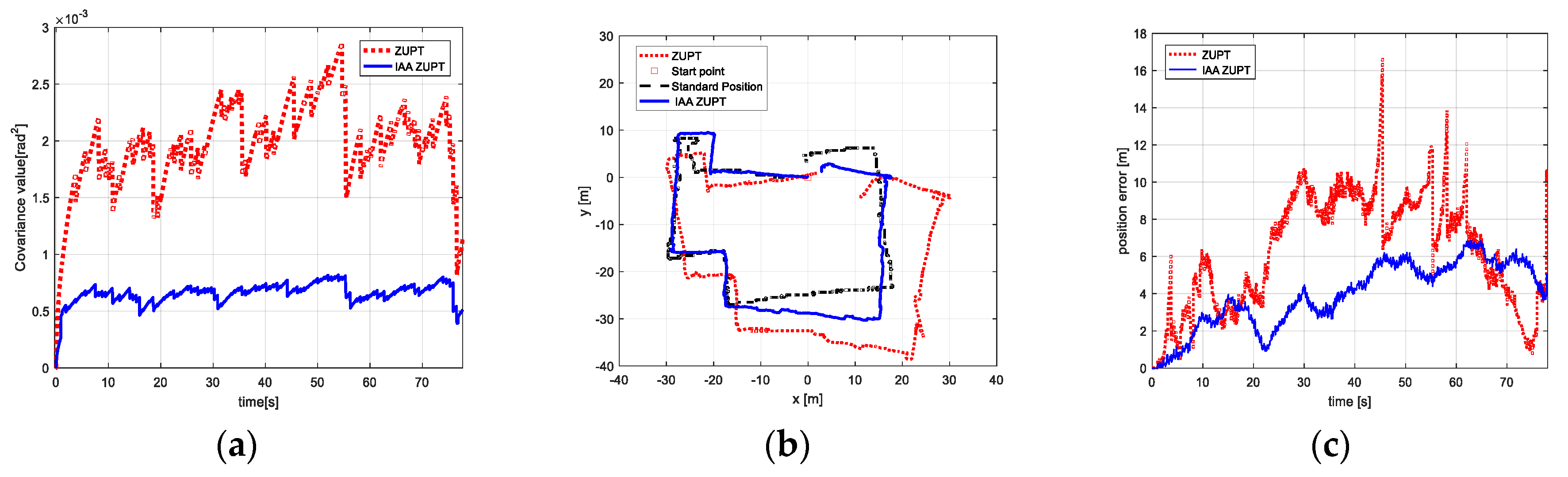
| 2 | C | 1.262 | FW 2 | Figure 11a–c |
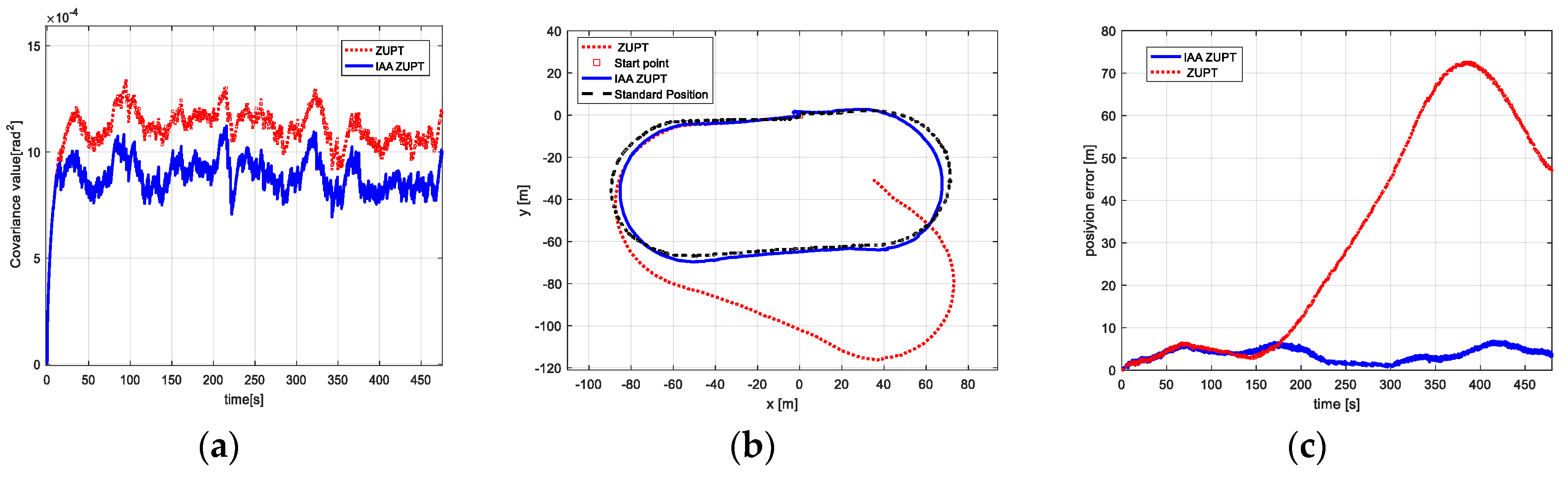
| 3 | A | 0.696 | SW 3 | Figure 12a–c |
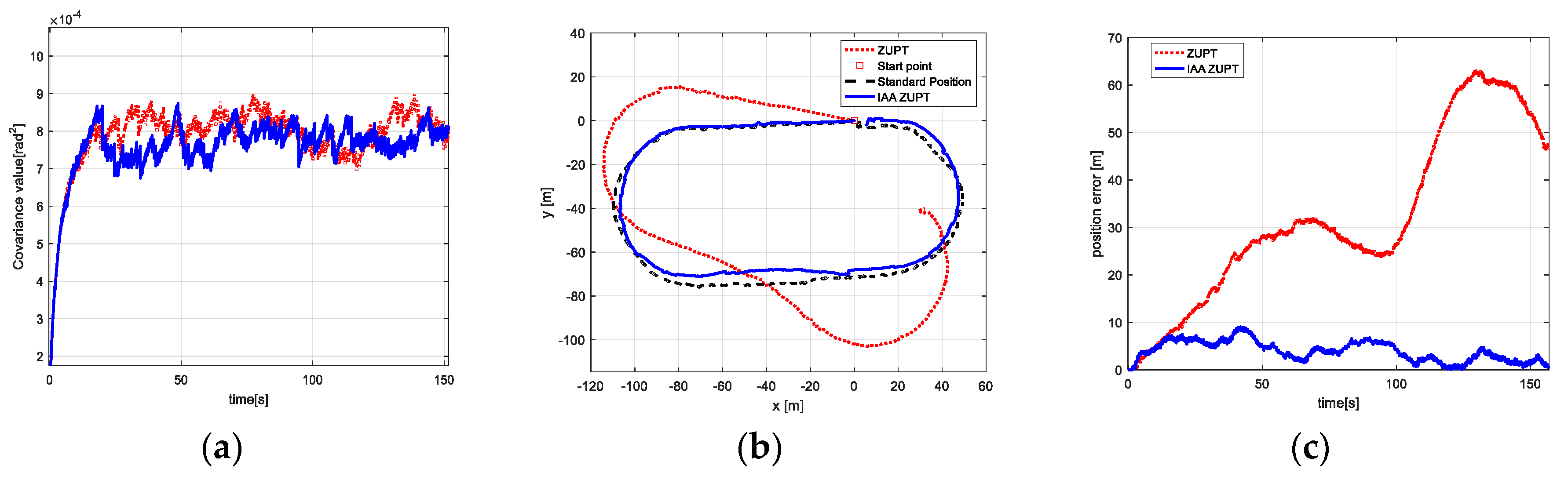
| 4 | C | 2.051 | R 4 | Figure 13a–c |
| 5 | A | 0.770 | SW | Figure 14a–c |
| 6 | B | 2.410 | R | Figure 15a–c |
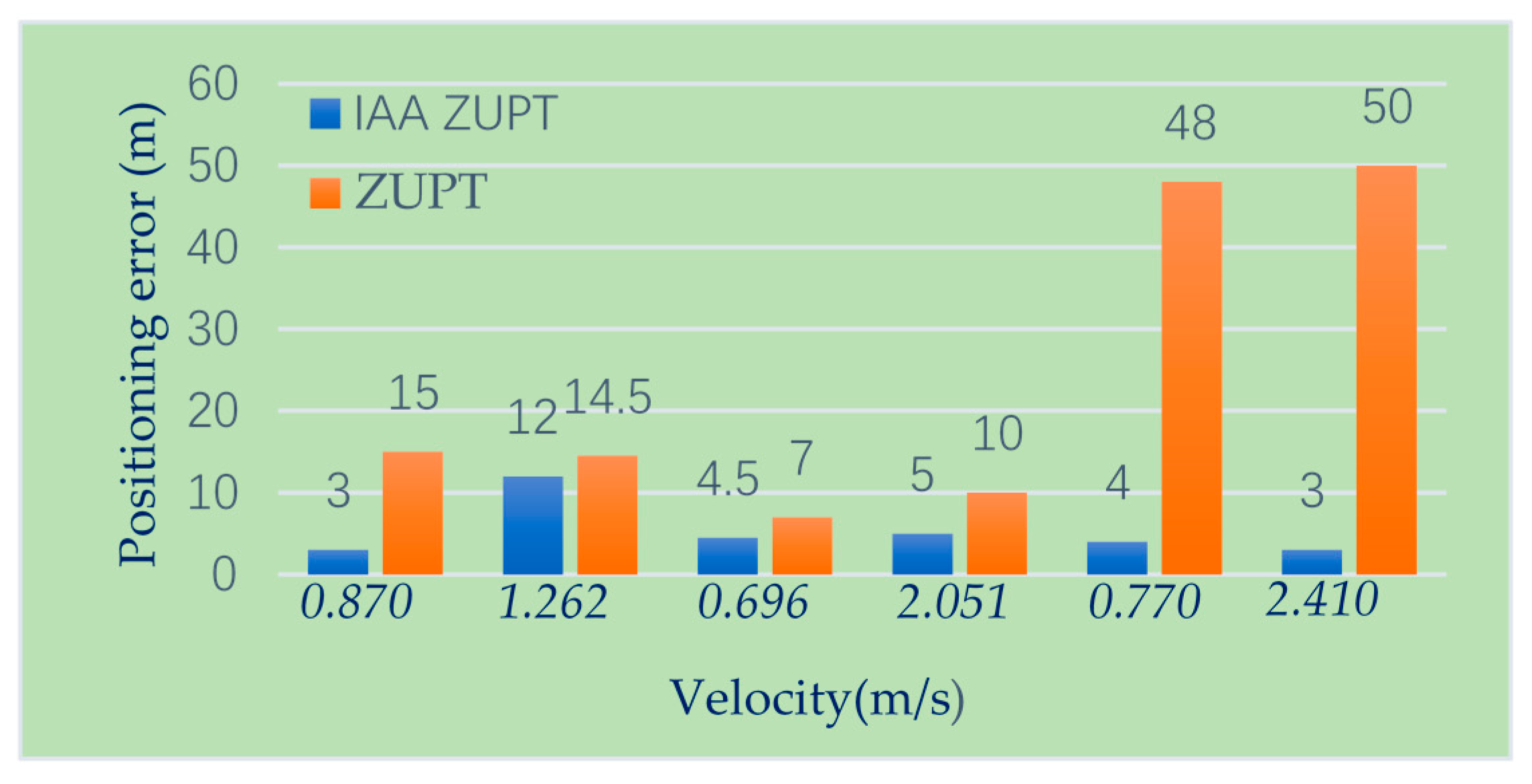
| Path | Velocity (m/s) | Positioning Error of IAA ZUPT (m) | Positioning Error of ZUPT (m) |
|---|---|---|---|
| Ⅰ | 0.870 | 3 | 15 |
| 1.262 | 12 | 14.5 | |
| Ⅱ | 0.696 | 4.5 | 7 |
| 2.051 | 5 | 10 | |
| Ⅲ | 0.770 | 4 | 48 |
| 2.410 | 3 | 50 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Q.; Liu, K.; Sun, Z.; Cai, M.; Cheng, M. Research on the Heading Calibration for Foot-Mounted Inertial Pedestrian-Positioning System Based on Accelerometer Attitude. Electronics 2019, 8, 1405. https://doi.org/10.3390/electronics8121405
Wang Q, Liu K, Sun Z, Cai M, Cheng M. Research on the Heading Calibration for Foot-Mounted Inertial Pedestrian-Positioning System Based on Accelerometer Attitude. Electronics. 2019; 8(12):1405. https://doi.org/10.3390/electronics8121405
Chicago/Turabian StyleWang, Qiuying, Kaiyue Liu, Zhiguo Sun, Muchun Cai, and Ming Cheng. 2019. "Research on the Heading Calibration for Foot-Mounted Inertial Pedestrian-Positioning System Based on Accelerometer Attitude" Electronics 8, no. 12: 1405. https://doi.org/10.3390/electronics8121405
APA StyleWang, Q., Liu, K., Sun, Z., Cai, M., & Cheng, M. (2019). Research on the Heading Calibration for Foot-Mounted Inertial Pedestrian-Positioning System Based on Accelerometer Attitude. Electronics, 8(12), 1405. https://doi.org/10.3390/electronics8121405