H∞ Consensus Control for Heterogeneous Multi-Agent via Output under Markov Switching Topologies


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
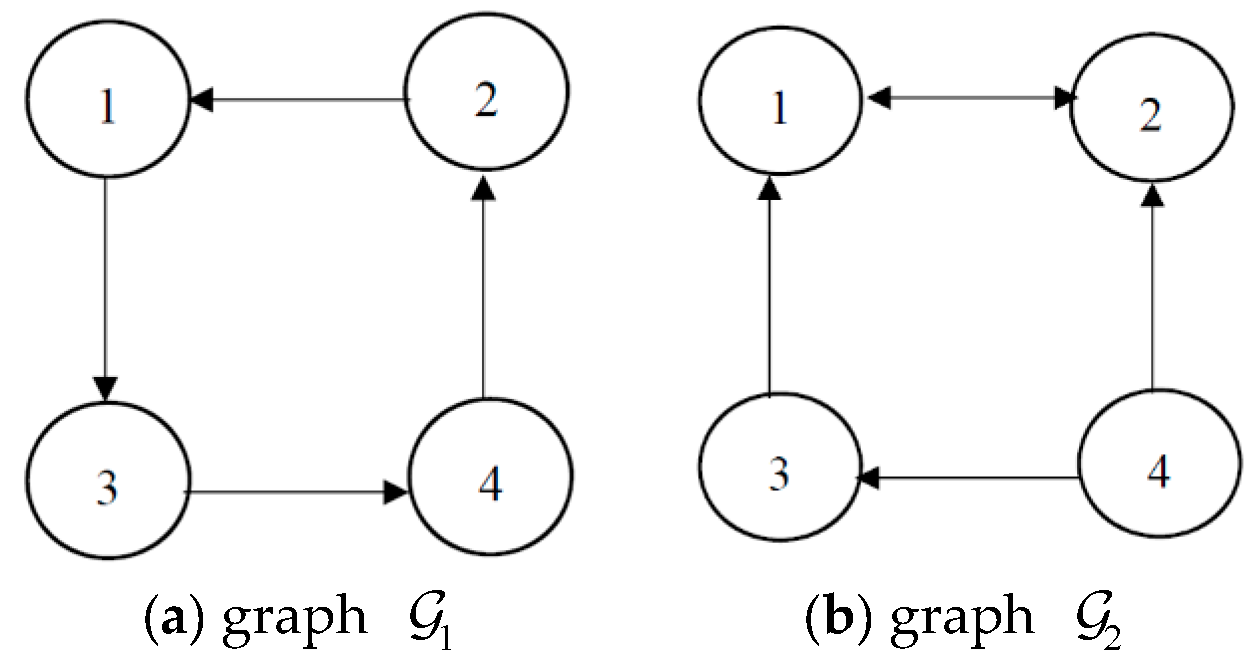
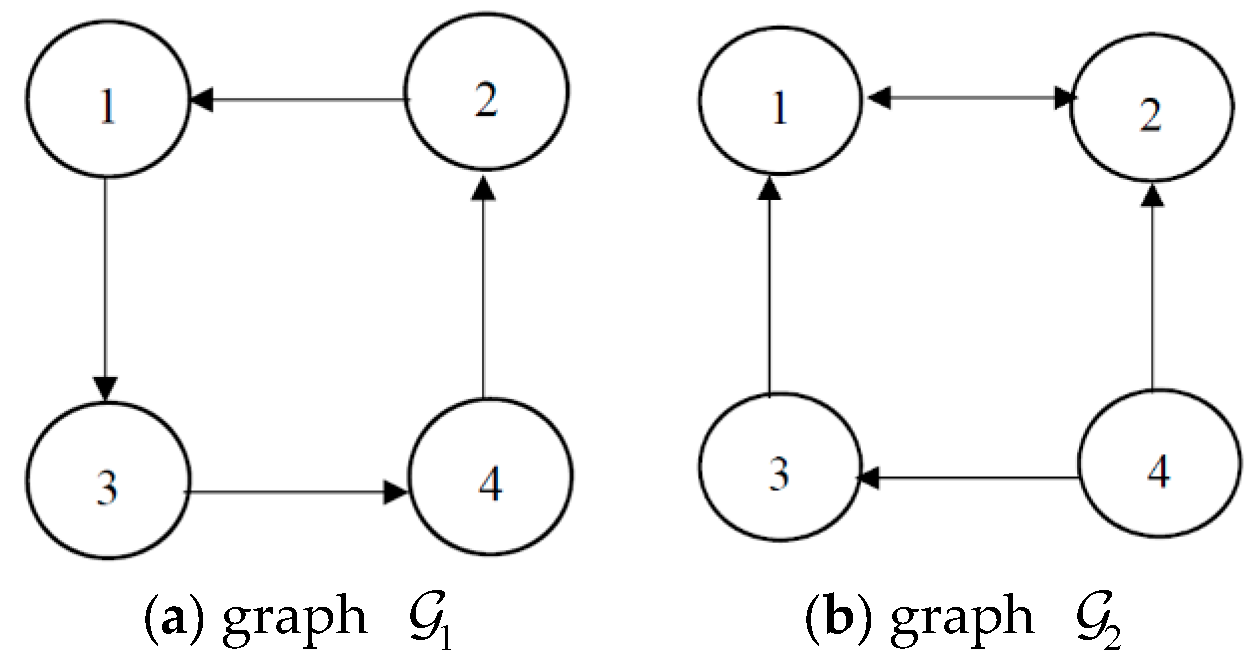
2. Graph Theory
3. Main results
3.1. Mean Square Consensus of Heterogeneous Multi-Agent Systems without Disturbance
- (1)
- Under the consensus algorithm (7), systems (1), (3), (4) reach mean square consensus with;
- (2)
- Under zero initial condition, for any nonzero, the following inequality holds for
3.2. Consensus of Heterogeneous Multi-Agent Systems with Disturbance
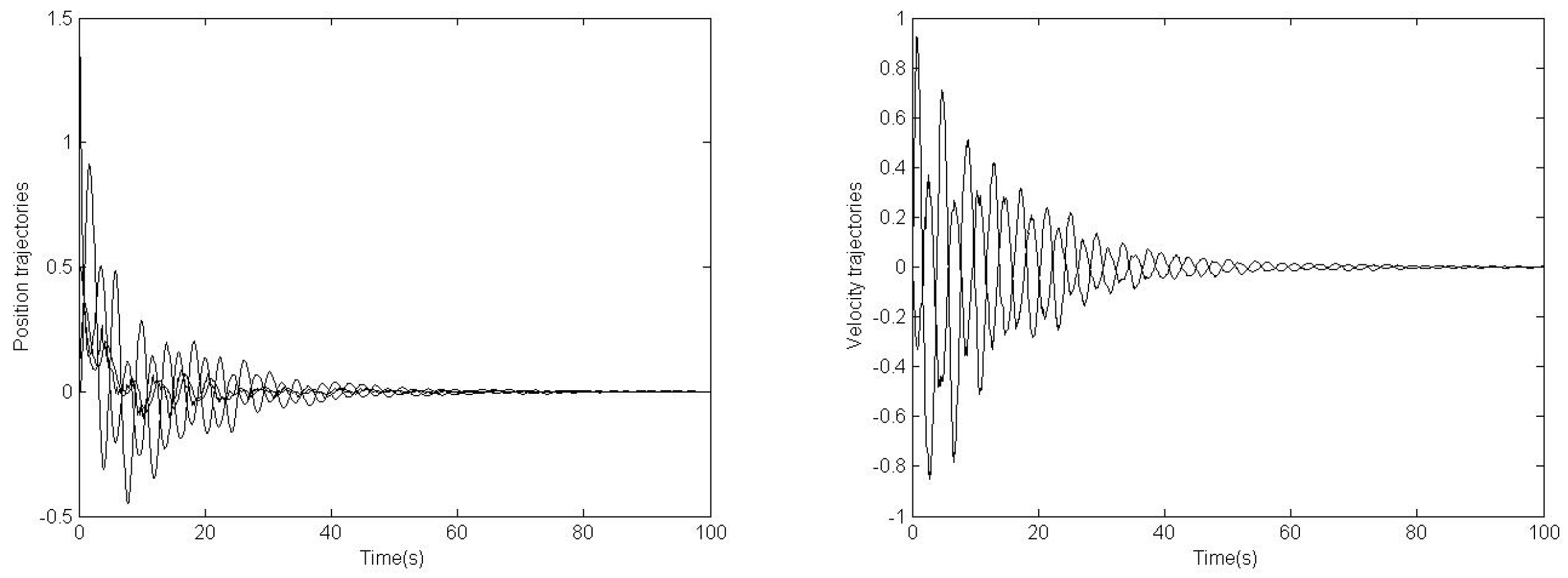
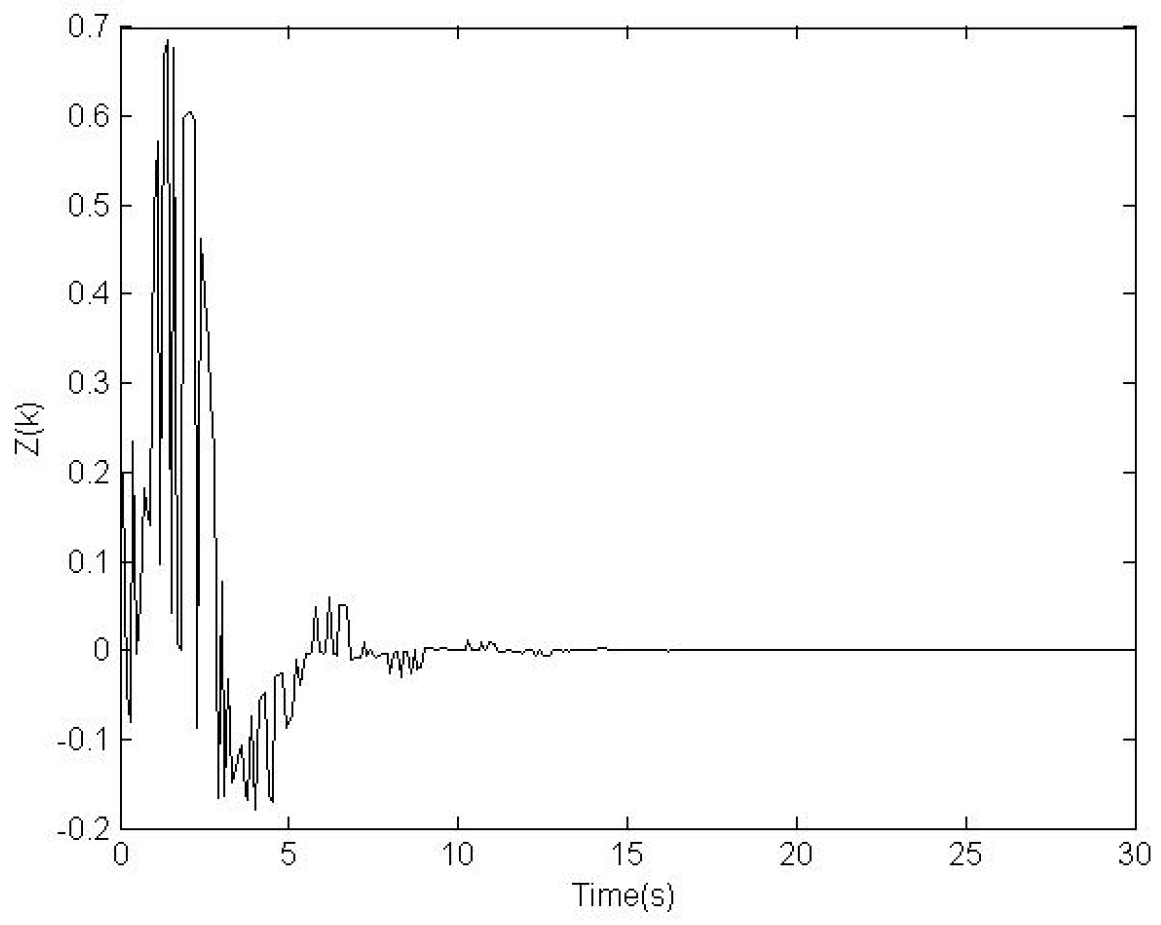
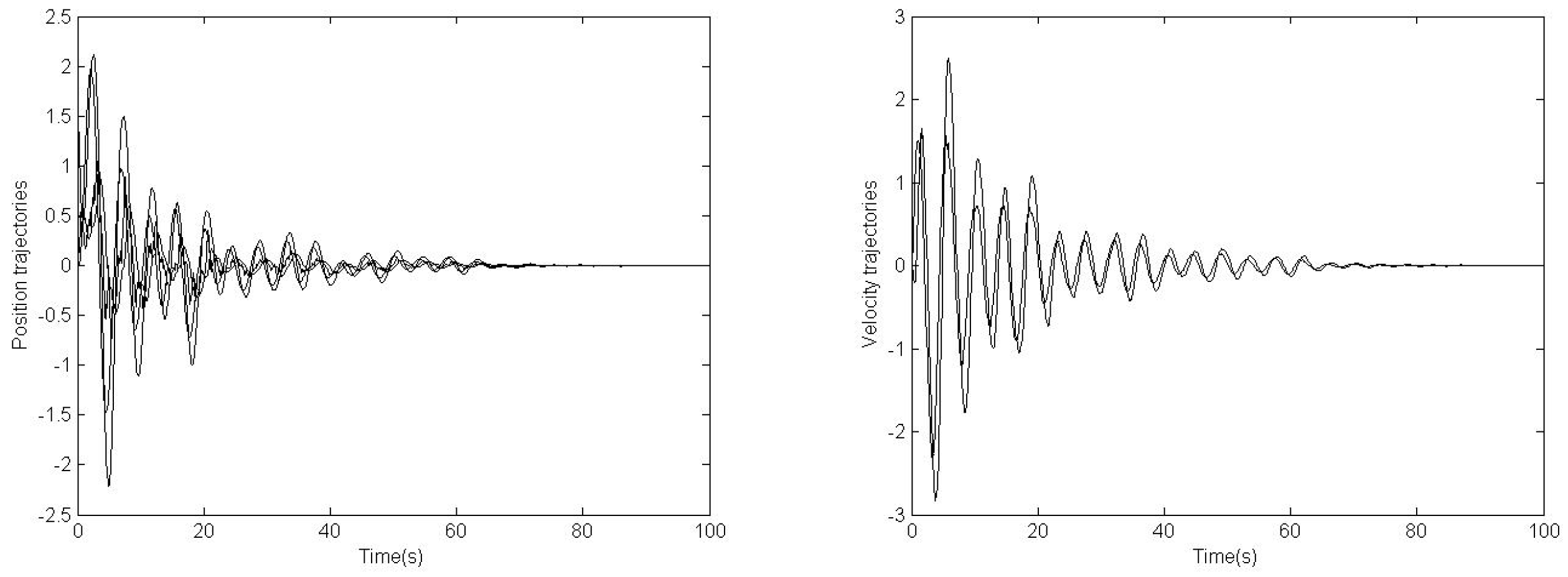
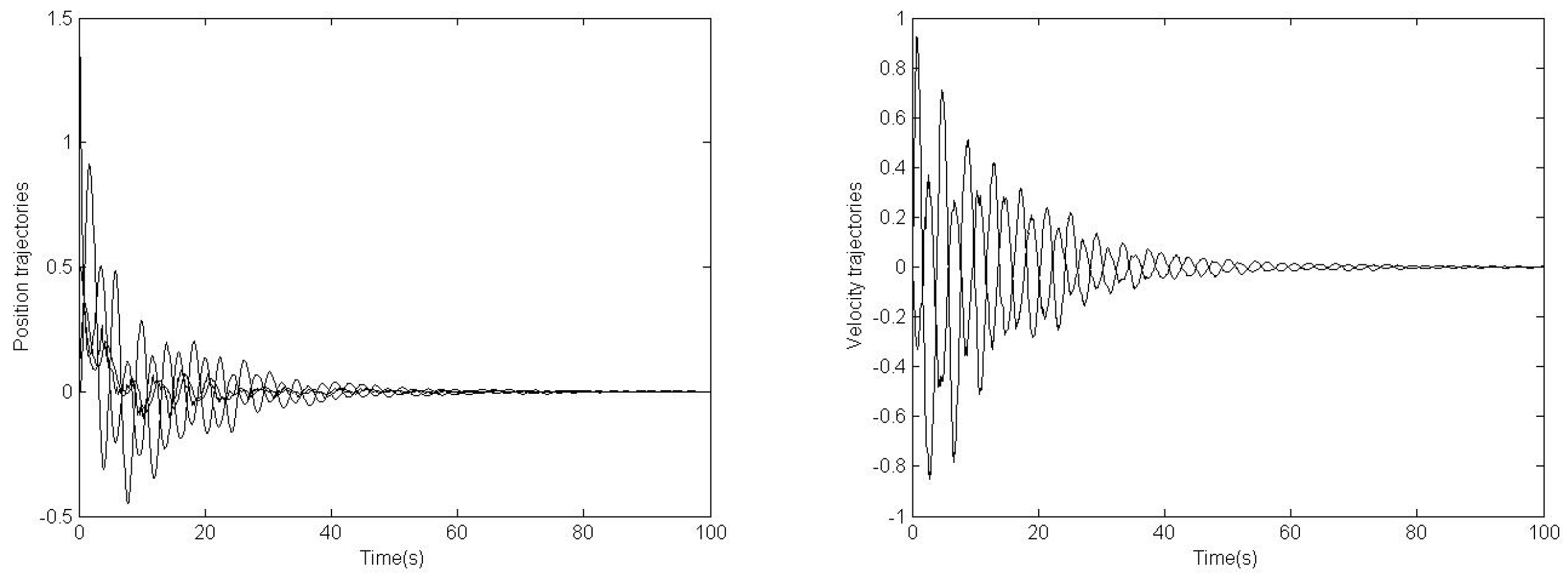
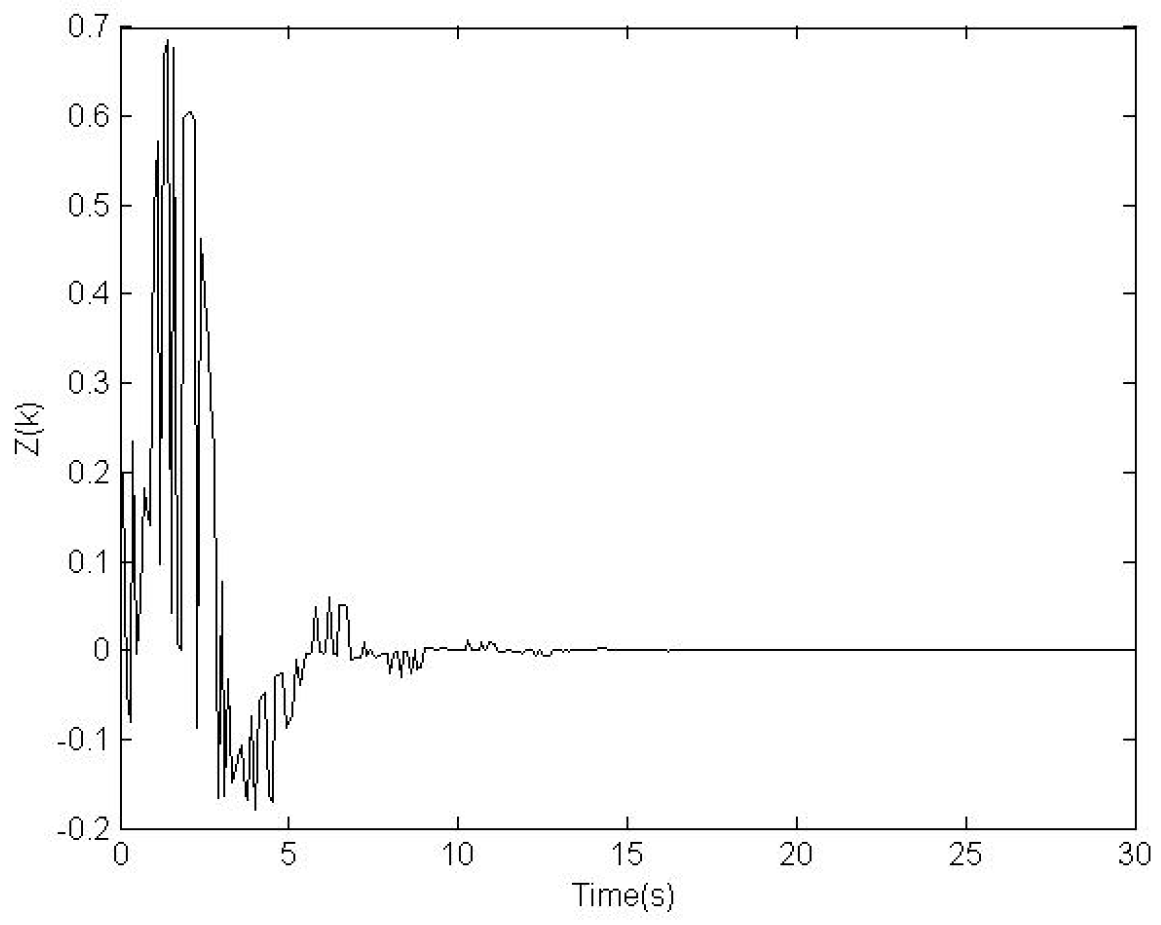
4. Simulations
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Olfati-saber, R.; Murray, R. Consensus problems in networks of agents with switching topology and time-delays. IEEE Trans. Autom. Control 2003, 48, 988–1002. [Google Scholar] [CrossRef]
- Ren, W.; Beard, R. Consensus seeking in multi-agent systems under dynamically changing interaction topologies. IEEE Trans. Autom. Control 2005, 50, 645–667. [Google Scholar]
- Ma, Q.; Xu, S.; Lewis, F. Second-order consensus for directed multi-agent systems with sampled data. Int. J. Robust Nonlinear Control 2014, 24, 2560–2573. [Google Scholar] [CrossRef]
- Cao, Y.; Ren, W.; Chen, Y. Multi-agent consensus using both current and outdated states. In Proceedings of the International Federation of Automatic Control, Seoul, Korea, 6–11 July 2008. [Google Scholar]
- Feng, Y.; Zheng, W. Group consensus control for discrete-time heterogeneous first- and second-order multi-agent systems. IET Control Theory Appl. 2018, 12, 753–756. [Google Scholar] [CrossRef]
- Shi, L.; Shao, J.; Cao, M.; Xia, H. Asynchronous group consensus for discrete-time heterogeneous multi-agent systems under dynamically changing interaction topologies. Inf. Sci. 2018, 463, 282–293. [Google Scholar] [CrossRef]
- Lin, P.; Jia, Y. Average consensus in networks of multi-agents with both switching topology and coupling time-delay. Phys. A 2008, 387, 303–313. [Google Scholar]
- Xu, X.; Liu, L.; Feng, G. Consensus of discrete-time linear multiagent systems with communication, input and output delays. IEEE Trans. Autom. Control 2018, 63, 492–497. [Google Scholar] [CrossRef]
- Tian, Y.; Zhang, Y. High-order consensus of heterogeneous multi-agent systems with unknown communication delays. Automatica 2012, 48, 1205–1212. [Google Scholar] [CrossRef]
- Wen, G.; Yu, Y.; Peng, Z.; Wang, H. Dynamical group consensus of heterogeneous multi-agent systems with input time delays. Neurocomputing 2016, 175, 278–286. [Google Scholar] [CrossRef]
- Wang, B.; Sun, Y. H∞ consensus for heterogeneous multi-agent systems with time delay. In Proceedings of the 14th International Conference on Automation and Systems, Kintex, Korea, 22–25 October 2014. [Google Scholar]
- Zhang, D.; Xu, Z.; Wang, Q.; Zhao, Y. Leader-follower H∞ consensus of linear multi-agent systems with aperiodic sampling and switching connected topologies. ISA Trans. 2017, 68, 150–159. [Google Scholar] [CrossRef]
- Ma, Q.; Xu, S.; Feng, G. Delay-dependent stability criteria for reaction-diffusion neural networks with time delays. IEEE Trans. Cybern. 2013, 43, 1913–1920. [Google Scholar] [CrossRef]
- Shao, H.; Li, H.; Zhu, C. New stability results for delayed neural networks. Appl. Math. Comput. 2017, 311, 324–334. [Google Scholar] [CrossRef]
- Zheng, B.; Fei, S.; Liu, X. Event-triggered and memory-based sliding mode variable structure control for memristive systems. Electronics 2018, 7, 253. [Google Scholar] [CrossRef]
- Liu, B.; Zhang, Y.; Jiang, F.; Gao, Y. Group consensus for a class of discrete-time heterogeneous multi-agent systems in directed topology. In Proceedings of the 32nd Youth Academic Annual Conference of Chinese Association of Automation, Hefei, China, 19–21 May 2017. [Google Scholar]
- Semsar-Kazerooni, E.; Khorasani, K. Optimal consensus algorithms for cooperative team of agents subject to partial information. Automatica 2008, 44, 2766–2777. [Google Scholar] [CrossRef]
- Jiang, Y.; Liu, J.; Wang, S. Consensus racking algorithm via observer-based distributed output feedback for multi-agent systems under switching topology. Circuits Syst. Signal Process. 2014, 33, 3037–3052. [Google Scholar] [CrossRef]
- Zhao, H.; Park, J.H. Dynamic output feedback consensus of continuous-time networked multi-agent systems. Complexity 2015, 20, 35–42. [Google Scholar] [CrossRef]
- Zhao, Y.; Duan, Z.; Wen, G. Distributed finite-time tracking of multiple Euler-Lagrange systems without velocity measurement. Int. J. Robust Nonlinear Control 2015, 25, 1688–1703. [Google Scholar] [CrossRef]
- Li, X.; Lam, J.; Gao, H. Improved results on H∞ model reduction for Markovian jump systems with partly known transition probabilities. Syst. Control Lett. 2014, 70, 109–117. [Google Scholar] [CrossRef]
- Zhao, H.; Ren, W.; Yuan, D.; Chen, J. Distributed discrete-time coordinated tracking with Markovian switching topologies. Syst. Control Lett. 2012, 61, 766–772. [Google Scholar] [CrossRef]
- Wang, H.; Xue, A.; Wang, J.; Lu, R. Event-based H∞ filtering for discrete-time Markov jump systems with network-induced delay. J. Frankl. Inst. 2017, 354, 6170–6189. [Google Scholar] [CrossRef]
- Zhang, Y.; Tian, Y. Consentability and protocol design of multi-agent systems with stochastic switching topology. Automatica 2009, 45, 1195–1201. [Google Scholar]
- Kim, J.; Park, J.; Choi, Y. Leaderless and leader-following consensus for heterogeneous multi-agent systems with random link failures. IET Control Theory Appl. 2014, 8, 51–60. [Google Scholar] [CrossRef]
- Hou, B.; Sun, F.; Li, H.; Liu, G. Stationary consensus of heterogeneous multi-agent systems with random delays governed by a Markov chian. IET Control Theory Appl. 2014, 8, 1905–1913. [Google Scholar] [CrossRef]
- Dai, J.; Guo, G. Event-based consensus for second-order multi-agent systems with actuator saturation under fixed and Markovian switching topologies. J. Frankl. Inst. 2017, 354, 6098–6118. [Google Scholar] [CrossRef]
- Santini, S.; Salvi, A.; Valente, A.S.; Pescapé, A.; Segata, M.; Cigno, R.L. A consensus-based approach for platooning with intervehicular communications and its validation in realistic scenarios. IEEE Trans. Veh. Technol. 2017, 66, 1985–1999. [Google Scholar]
- Mostafaei, H.; Montieri, A.; Persico, V.; Pescapé, A. A sleep scheduling approach based on learning automata for WSN partial coverage. J. Netw. Comput. Appl. 2017, 80, 67–78. [Google Scholar]
- Awad, A.; Chapman, A.; Schoof, E.; Narang-Siddarth, A.; Mesbahi, M. Time-scale separation on networks: Consensus, tracking and state-dependent interactions. In Proceedings of the IEEE 54th Annual Conference on Decision and Control, Osaka, Japan, 15–18 December 2015. [Google Scholar]
- He, Y.; Liu, G.; Rees, D.; Wu, M. H∞ filtering for discrete-time systems with time-varying delay. Signal Process. 2009, 89, 275–282. [Google Scholar] [CrossRef]

© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miao, G.; Li, G.; Li, T.; Liu, Y. H∞ Consensus Control for Heterogeneous Multi-Agent via Output under Markov Switching Topologies. Electronics 2018, 7, 453. https://doi.org/10.3390/electronics7120453
Miao G, Li G, Li T, Liu Y. H∞ Consensus Control for Heterogeneous Multi-Agent via Output under Markov Switching Topologies. Electronics. 2018; 7(12):453. https://doi.org/10.3390/electronics7120453
Chicago/Turabian StyleMiao, Guoying, Gang Li, Tao Li, and Yunping Liu. 2018. "H∞ Consensus Control for Heterogeneous Multi-Agent via Output under Markov Switching Topologies" Electronics 7, no. 12: 453. https://doi.org/10.3390/electronics7120453
APA StyleMiao, G., Li, G., Li, T., & Liu, Y. (2018). H∞ Consensus Control for Heterogeneous Multi-Agent via Output under Markov Switching Topologies. Electronics, 7(12), 453. https://doi.org/10.3390/electronics7120453