
Low-Cost Robust Detection Method of Interturn Short-Circuit Fault for Distribution Transformer Based on ΔU-I Locus Characteristic



Abstract
1. Introduction
2. Theoretical Analysis
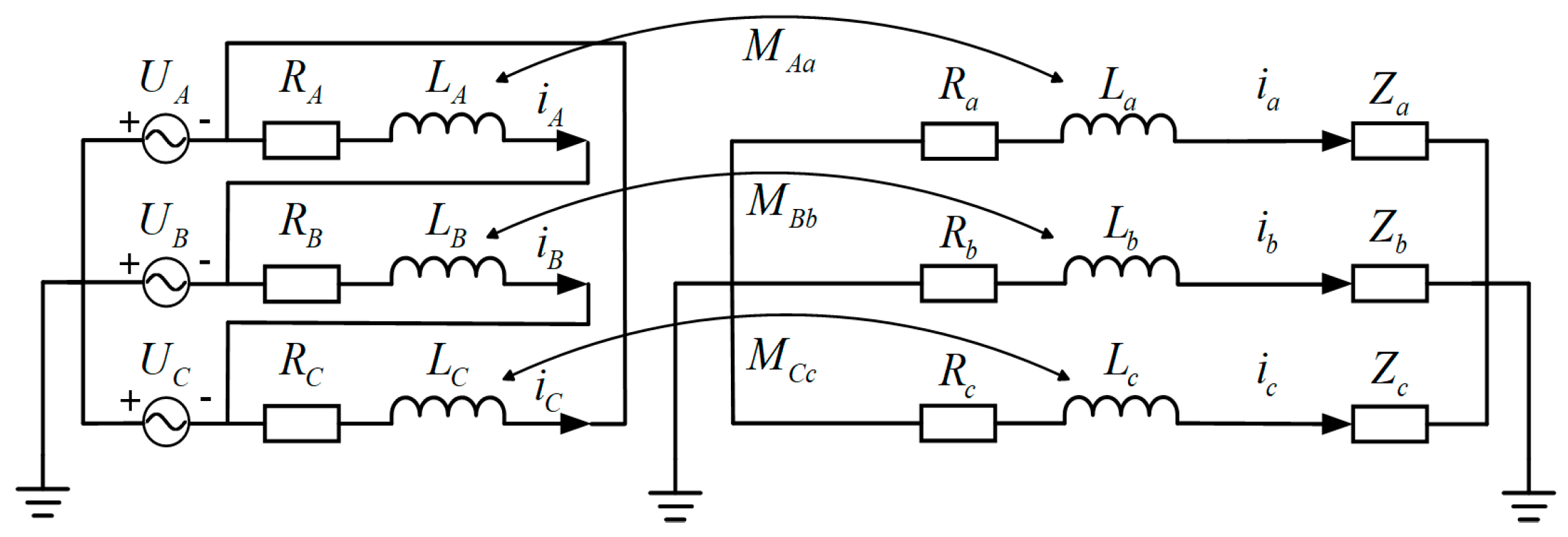
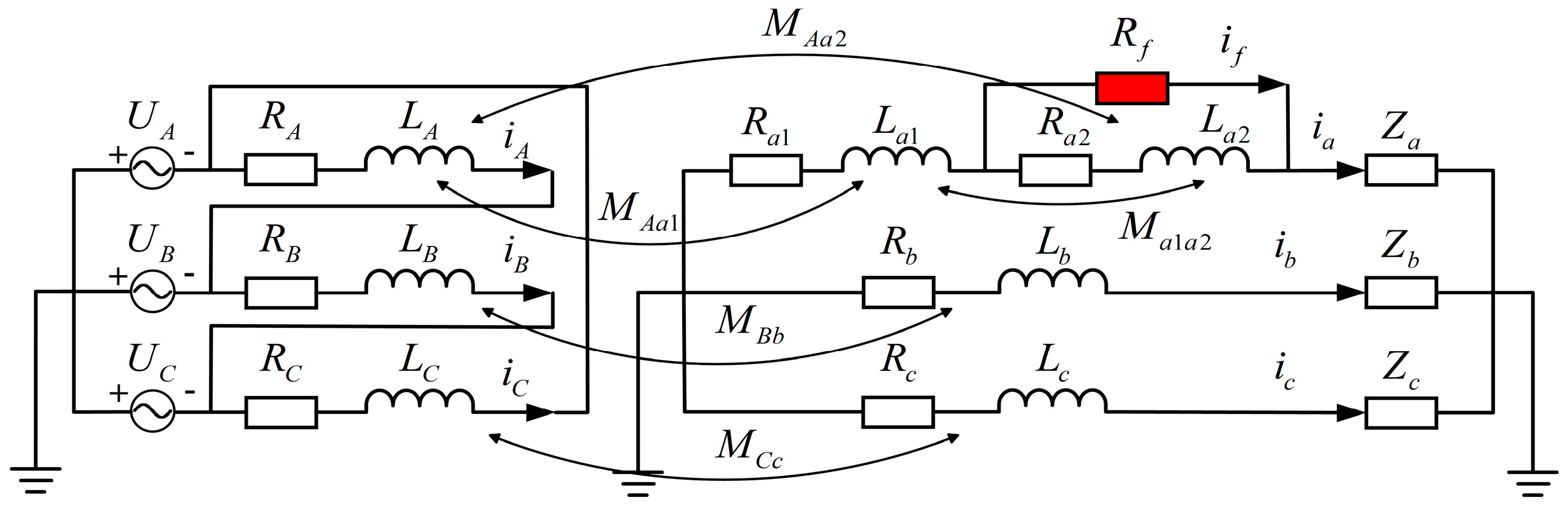
2.1. The ISCF Model of Three-Phase Transformer
2.2. ΔU-I Locus Function
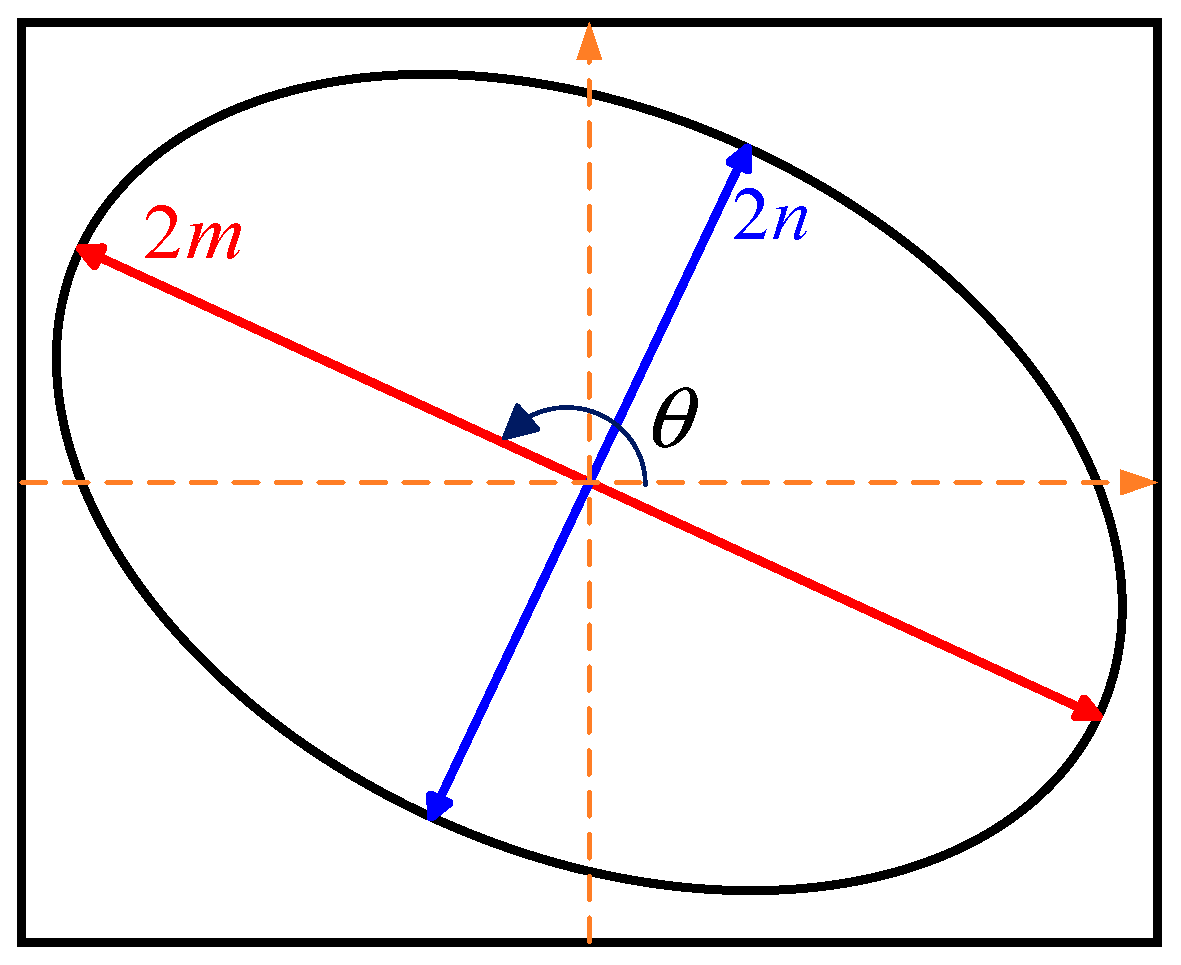
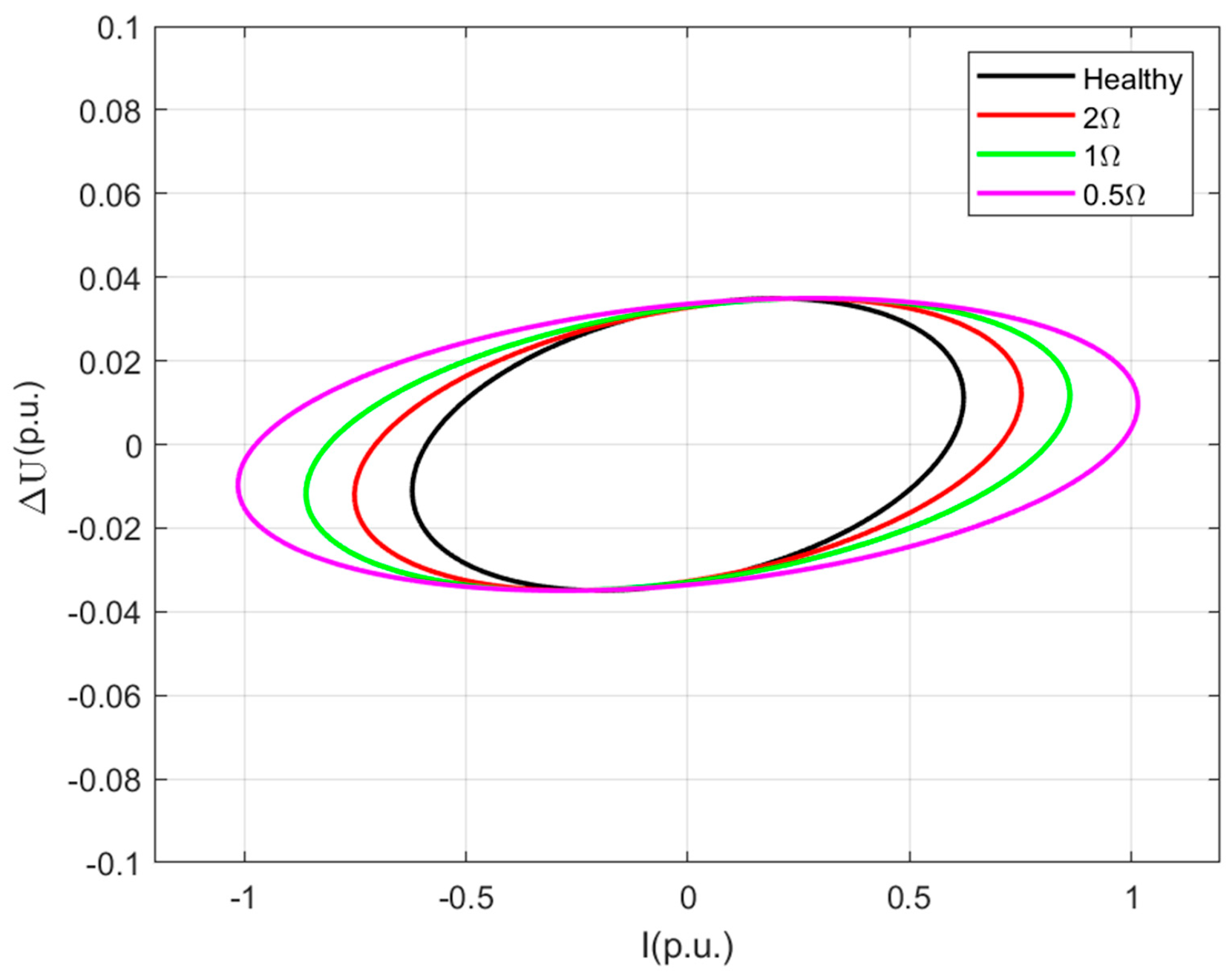
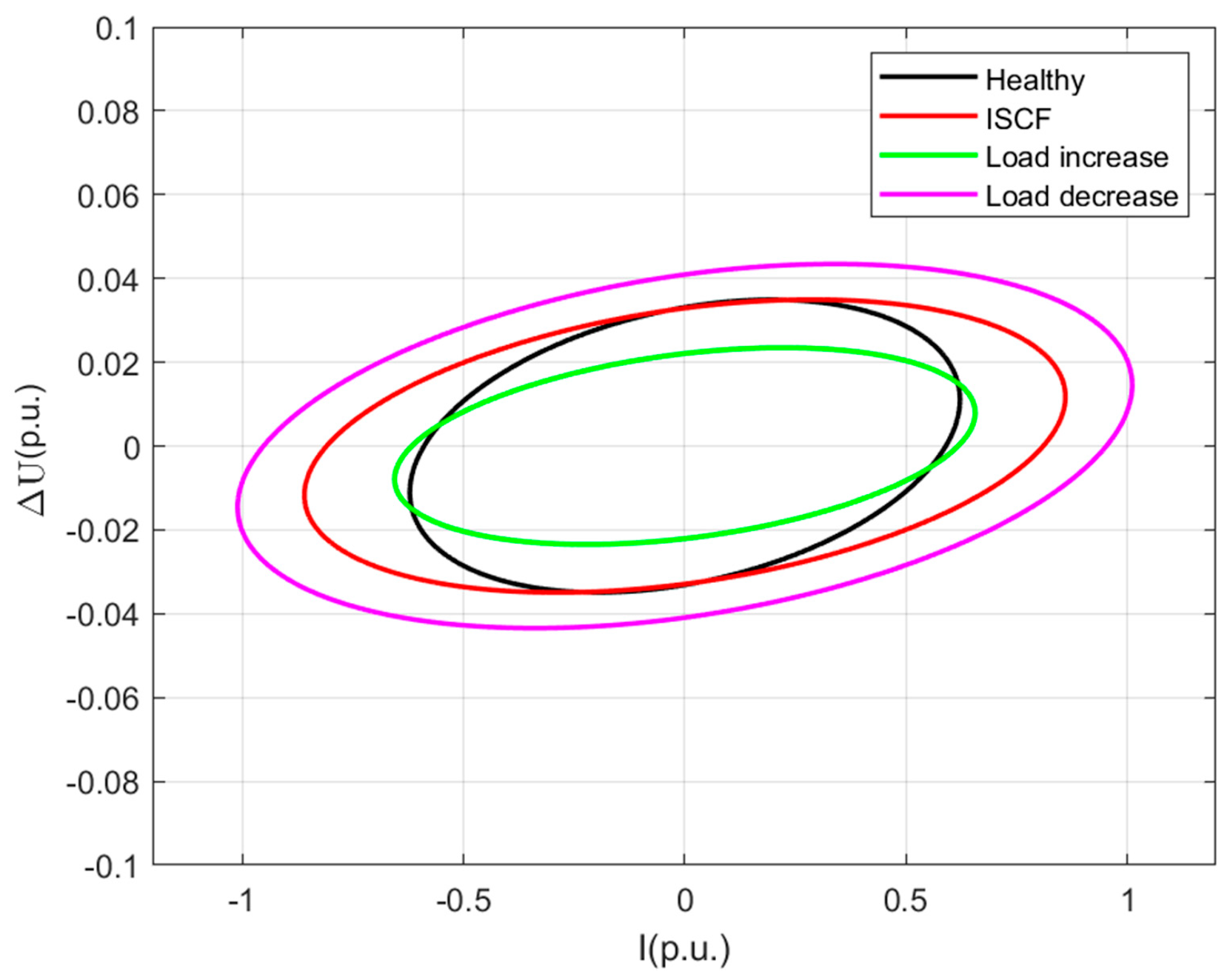
2.3. Ellipse Curve Characteristics
3. Proposed Detection Method
3.1. Fault Indicator
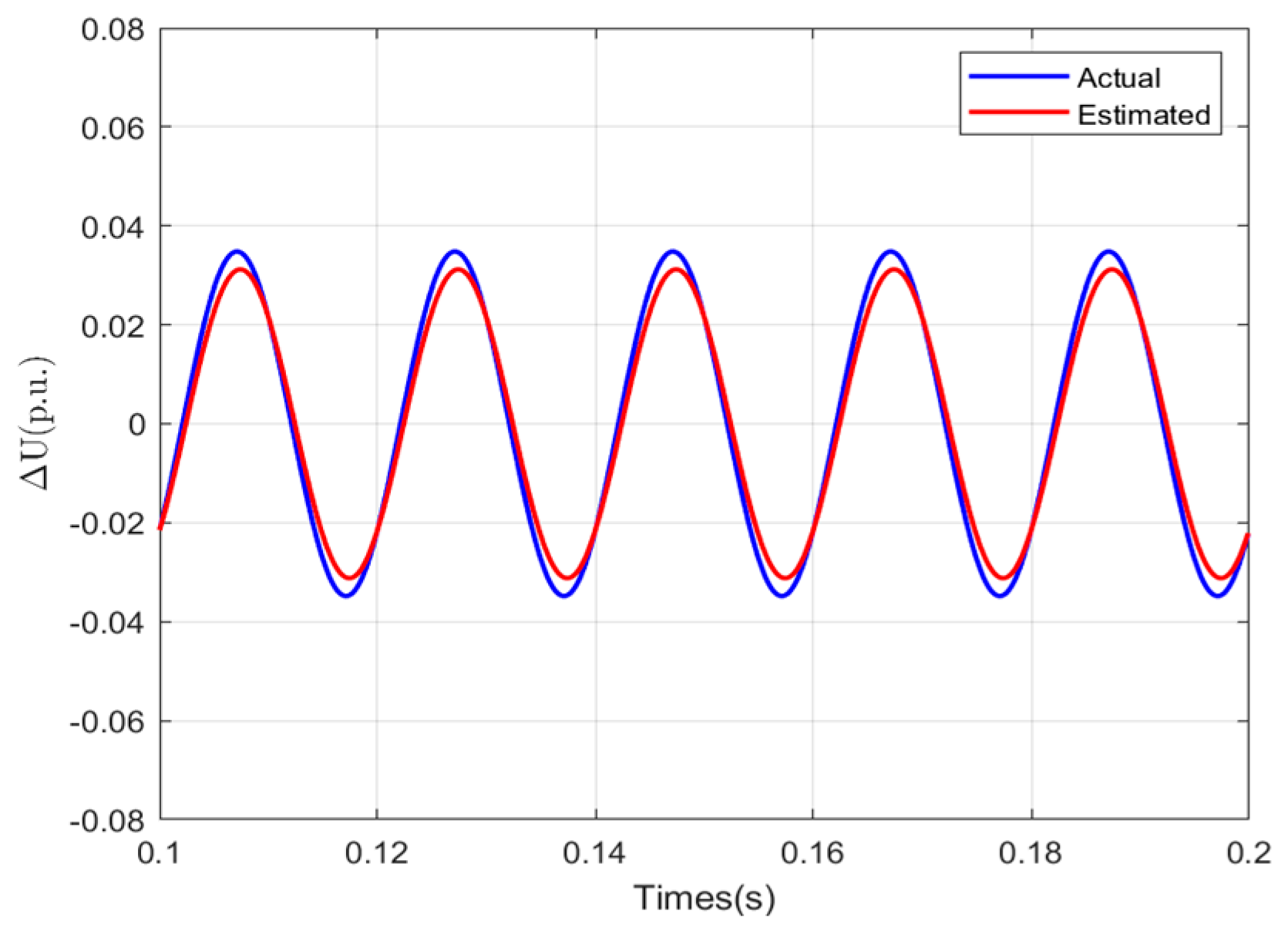
3.2. Low-Cost Phase Voltage Estimator
4. Simulation Validation and Performance Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A
References
- Amoiralis, E.I.; Tsili, M.A.; Kladas, A.G. Power Transformer Economic Evaluation in Decentralized Electricity Markets. IEEE Trans. Ind. Electron. 2012, 59, 2329–2341. [Google Scholar] [CrossRef]
- Meira, M.; Bossio, G.R.; Ruschetti, C.R.; Verucchi, C.J. Inter-Turn Short-Circuit Detection Through Differential Admittance Monitoring in Transformers. IEEE Trans. Instrum. Meas. 2024, 73, 3519508. [Google Scholar]
- Liu, D.; Wang, Y.; Liu, C.; Yuan, X.; Yang, C.; Gui, W. Data Mode Related Interpretable Transformer Network for Predictive Modeling and Key Sample Analysis in Industrial Processes. IEEE Trans. Ind. Inform. 2023, 19, 9325–9336. [Google Scholar] [CrossRef]
- Kumar, A.; Bhalja, B.R.; Kumbhar, G.B. Approach for Identification of Inter-Turn Fault Location in Transformer Windings Using Sweep Frequency Response Analysis. IEEE Trans. Power. Del. 2022, 66, 1539–1548. [Google Scholar] [CrossRef]
- Moradzadeh, A.; Pourhossein, K.; Mohammadi-Ivatloo, B.; Mohammadi, F. Locating Inter-Turn Faults in Transformer Windings Using Isometric Feature Mapping of Frequency Response Traces. IEEE Trans. Ind. Inform. 2021, 17, 6962–6970. [Google Scholar] [CrossRef]
- Farzin, N.; Vakilian, M.; Hajipour, E. Transformer Turn-to-Turn Fault Protection Based on Fault-Related Incremental Currents. IEEE Trans. Power. Del. 2019, 34, 700–709. [Google Scholar] [CrossRef]
- Ahmadi, S.-A.; Sanaye-Pasand, M.; Abedini, M.; Samimi, M.H. Online Sensitive Turn-to-Turn Fault Detection in Power Transformers. IEEE Trans. Ind. Electron. 2022, 69, 13555–13564. [Google Scholar] [CrossRef]
- Bagheri, S.; Moravej, Z.; Gharehpetian, G.B. Classification and Discrimination Among Winding Mechanical Defects, Internal and External Electrical Faults, and Inrush Current of Transformer. IEEE Trans. Ind. Inform. 2018, 14, 484–493. [Google Scholar] [CrossRef]
- Zhao, Z.; Yao, C.; Li, C.; Islam, S. Detection of Power Transformer Winding Deformation Using Improved FRA Based on Binary Morphology and Extreme Point Variation. IEEE Trans. Ind. Electron. 2018, 65, 3509–3519. [Google Scholar] [CrossRef]
- Zheng, J.; Huang, H.; Pan, J. Detection of Winding Faults Based on a Characterization of the Nonlinear Dynamics of Transformers. IEEE Trans. Instrum. Meas. 2019, 68, 206–214. [Google Scholar] [CrossRef]
- Luo, B.; Wang, H.; Liu, H.; Li, B.; Peng, F. Early Fault Detection of Machine Tools Based on Deep Learning and Dynamic Identification. IEEE Trans. Ind. Electron. 2016, 23, 509–518. [Google Scholar] [CrossRef]
- Masoum, A.S.; Hashemnia, N.; Abu-Siada, A.; Masoum, M.A.S.; Islam, S.M. Online Transformer Internal Fault Detection Based on Instantaneous Voltage and Current Measurements Considering Impact of Harmonics. IEEE Trans. Power Del. 2017, 32, 587–598. [Google Scholar] [CrossRef]
- Lavrinovich, V.A.; Mytnikov, A.V. Development of pulsed method for diagnostics of transformer windings based on short probe impulse. IEEE Trans. Dielect. Elect. Insul. 2015, 22, 2041–2045. [Google Scholar] [CrossRef]
- Pham, D.A.K.; Gockenbach, E. Analysis of physical transformer circuits for frequency response interpretation and mechanical failure diagnosis. IEEE Trans. Dielect. Elect. Insul. 2019, 68, 1491–1499. [Google Scholar] [CrossRef]
- Akhmetov, Y.; Nurmanova, V.; Bagheri, M.; Zollanvari, A.; Gharehpetian, G.B. A New Diagnostic Technique for Reliable Decision-Making on Transformer FRA Data in Interturn Short-Circuit Condition. IEEE Trans. Ind. Electron. 2021, 17, 3020–3031. [Google Scholar] [CrossRef]
- Ouyang, X.; Zhou, Q.; Shang, H.; Zheng, Y.; Pan, S.; Luo, J. Toward a Comprehensive Evaluation on the Online Methods for Monitoring Transformer Turn-to-Turn Faults. IEEE Trans. Ind. Electron. 2024, 71, 1997–2007. [Google Scholar] [CrossRef]
- Kumar, A.; Bhalja, B.R.; Kumbhar, G.B. Novel Technique for Location Identification and Estimation of Extent of Turn-to-Turn Fault in Transformer Winding. IEEE Trans. Ind. Electron. 2023, 70, 7382–7392. [Google Scholar] [CrossRef]
- Shi, Y.; Ji, S.; Zhang, F.; Dang, Y.; Zhu, L. Application of operating deflection shapes to the vibration-based mechanical condition monitoring of power transformer windings. IEEE Trans. Power Del. 2021, 36, 2164–2173. [Google Scholar] [CrossRef]
- Wu, S.; Ji, S.; Zhang, Y.; Wang, S.; Liu, H. A Novel Vibration Frequency Response Analysis Method for Mechanical Condition Detection of Converter Transformer Windings. IEEE Trans. Ind. Electron. 2024, 71, 8176–8180. [Google Scholar] [CrossRef]
- Haghjoo, F.; Mostafaei, M.; Mohammadi, H. A new leakage flux-based technique for turn-to-turn fault protection and faulty region identification in transformers. IEEE Trans. Power Del. 2018, 33, 671–679. [Google Scholar] [CrossRef]
- Venikar, P.A.; Ballal, M.S.; Umre, B.S.; Suryawanshi, H.M. Search coil based online diagnostics of transformer internal faults. IEEE Trans. Power Del. 2017, 32, 2520–2529. [Google Scholar] [CrossRef]
- Yao, C.; Zhao, Z.; Mi, Y.; Li, C.; Liao, Y.; Qian, G. Improved online monitoring method for transformer winding deformations based on the Lissajous graphical analysis of voltage and current. IEEE Trans. Power Del. 2015, 30, 1965–1973. [Google Scholar] [CrossRef]
- Zhao, X.; Yao, C.; Zhou, Z.; Li, C.X.; Wang, X.; Zhu, T.; Abu-Siada, A. Experimental Evaluation of Transformer Internal Fault Detection Based on V–I Characteristics. IEEE Trans. Ind. Electron. 2020, 67, 4108–4119. [Google Scholar] [CrossRef]
- Nurmanova, V.; Bagheri, M.; Zollanvari, A.; Aliakhmet, K.; Akhmetov, Y.; Gharehpetian, G.B. A New Transformer FRA Measurement Technique to Reach Smart Interpretation for Inter-Disk Faults. IEEE Trans. Power Del. 2019, 34, 1508–1519. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, F.; Dang, Y.; Zhan, C.; Wang, S.; Ji, S. A Mechanical-Electromagnetic Coupling Model of Transformer Windings and its Application in the Vibration-Based Condition Monitoring. IEEE Trans. Power Del. 2023, 38, 2387–2397. [Google Scholar] [CrossRef]
- Xian, R.; Wang, L.; Zhang, B.; Li, J.; Xian, R.; Li, J. Identification Method of Interturn Short Circuit Fault for Distribution Transformer Based on Power Loss Variation. IEEE Trans. Ind. Inform. 2024, 20, 2444–2454. [Google Scholar] [CrossRef]
- Abu-Siada, A.; Islam, S. A Novel Online Technique to Detect Power Transformer Winding Faults. IEEE Trans. Power Del. 2012, 27, 849–857. [Google Scholar] [CrossRef]
- Medeiros, R.P.; Costa, F.B.; Silva, K.M. Power transformer differential protection using the boundary discrete wavelet transform. IEEE Trans. Power Del. 2016, 31, 2083–2095. [Google Scholar] [CrossRef]
- Tripathy, M.; Maheshwari, R.P.; Verma, H.K. Power transformer differential protection based on optimal probabilistic neural network. IEEE Trans. Power Del. 2015, 30, 1007–1015. [Google Scholar] [CrossRef]
- Hechifa, A.; Labiod, C.; Lakehal, A.; Nanfak, A.; Mansour, D.-E.A. A Novel Graphical Method for Interpretating Dissolved Gases and Fault Diagnosis in Power Transformer Based on Dynamique Axes in Circular Form. IEEE Trans. Power Del. 2024, 39, 3186–3198. [Google Scholar] [CrossRef]
- Kumar, A.; Bhalja, B.R.; Kumbhar, G.B. A New Improved Methodology to Identify an Interturn Fault Location in Transformer Winding Based on Fault Location Factor. IEEE Trans. Ind. Electron. 2024, 71, 15024–15033. [Google Scholar] [CrossRef]
- Bhalja, H.; Bhalja, B.R.; Agarwal, P.; Malik, O.P. Time–Frequency Decomposition Based Protection Scheme for Power Transformer— Simulation and Experimental Validation. IEEE Trans. Ind. Electron. 2024, 71, 5296–5306. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Model number | S13-M-400 |
| Number of phases | 3 |
| Connection group symbol | Dyn11 |
| Rated capacity | 400 kVA |
| Rated frequency | 50 Hz |
| Rated voltage | 10/0.4 kV |
| No-load power loss | 200 W |
| Load power loss | 4520 W |
| No-load current | 0.5% |
| Short-circuit impedance voltage | 4.0% |
| Method | Healthy | 4% | 8% | 12% |
|---|---|---|---|---|
| Conventional method θ | 1.0227° | 0.9287° | 0.6305° | 0.3824° |
| Proposed method FI | 18.7716 | 22.9750 | 33.7263 | 48.4405 |
| Method | Healthy | 2 Ω | 1 Ω | 0.5 Ω |
|---|---|---|---|---|
| Conventional method θ | 1.0226° | 0.9294° | 0.7823° | 0.5493° |
| Proposed method FI | 18.7716 | 22.9639 | 26.1650 | 30.2084 |
| Method | Healthy | Load Increase | Load Decrease |
|---|---|---|---|
| Conventional method θ | 1.0229° | 1.0225° | 1.0226° |
| Proposed method FI | 18.7716 | 18.7718 | 18.7716 |
| Method | Healthy | Faulty | Load Increase | Load Decrease |
|---|---|---|---|---|
| Conventional method θ | 1.0229° | 0.7845° | 0.6960° | 0.8263° |
| Proposed method FI | 18.7716 | 26.1320 | 26.7113 | 25.6996 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lin, J.; Ji, T.; Zhu, H.; Wang, Y.; Hu, J.; Sun, Y.; Wang, W. Low-Cost Robust Detection Method of Interturn Short-Circuit Fault for Distribution Transformer Based on ΔU-I Locus Characteristic. Electronics 2025, 14, 2458. https://doi.org/10.3390/electronics14122458
Lin J, Ji T, Zhu H, Wang Y, Hu J, Sun Y, Wang W. Low-Cost Robust Detection Method of Interturn Short-Circuit Fault for Distribution Transformer Based on ΔU-I Locus Characteristic. Electronics. 2025; 14(12):2458. https://doi.org/10.3390/electronics14122458
Chicago/Turabian StyleLin, Jinwei, Tao Ji, Han Zhu, Yunlong Wang, Jialei Hu, Yonghao Sun, and Wei Wang. 2025. "Low-Cost Robust Detection Method of Interturn Short-Circuit Fault for Distribution Transformer Based on ΔU-I Locus Characteristic" Electronics 14, no. 12: 2458. https://doi.org/10.3390/electronics14122458
APA StyleLin, J., Ji, T., Zhu, H., Wang, Y., Hu, J., Sun, Y., & Wang, W. (2025). Low-Cost Robust Detection Method of Interturn Short-Circuit Fault for Distribution Transformer Based on ΔU-I Locus Characteristic. Electronics, 14(12), 2458. https://doi.org/10.3390/electronics14122458