
Adaptive NN Control of Electro-Hydraulic System with Full State Constraints

Abstract
:1. Introduction
2. Problem Formulation and Preliminaries
2.1. Hydraulic System Model
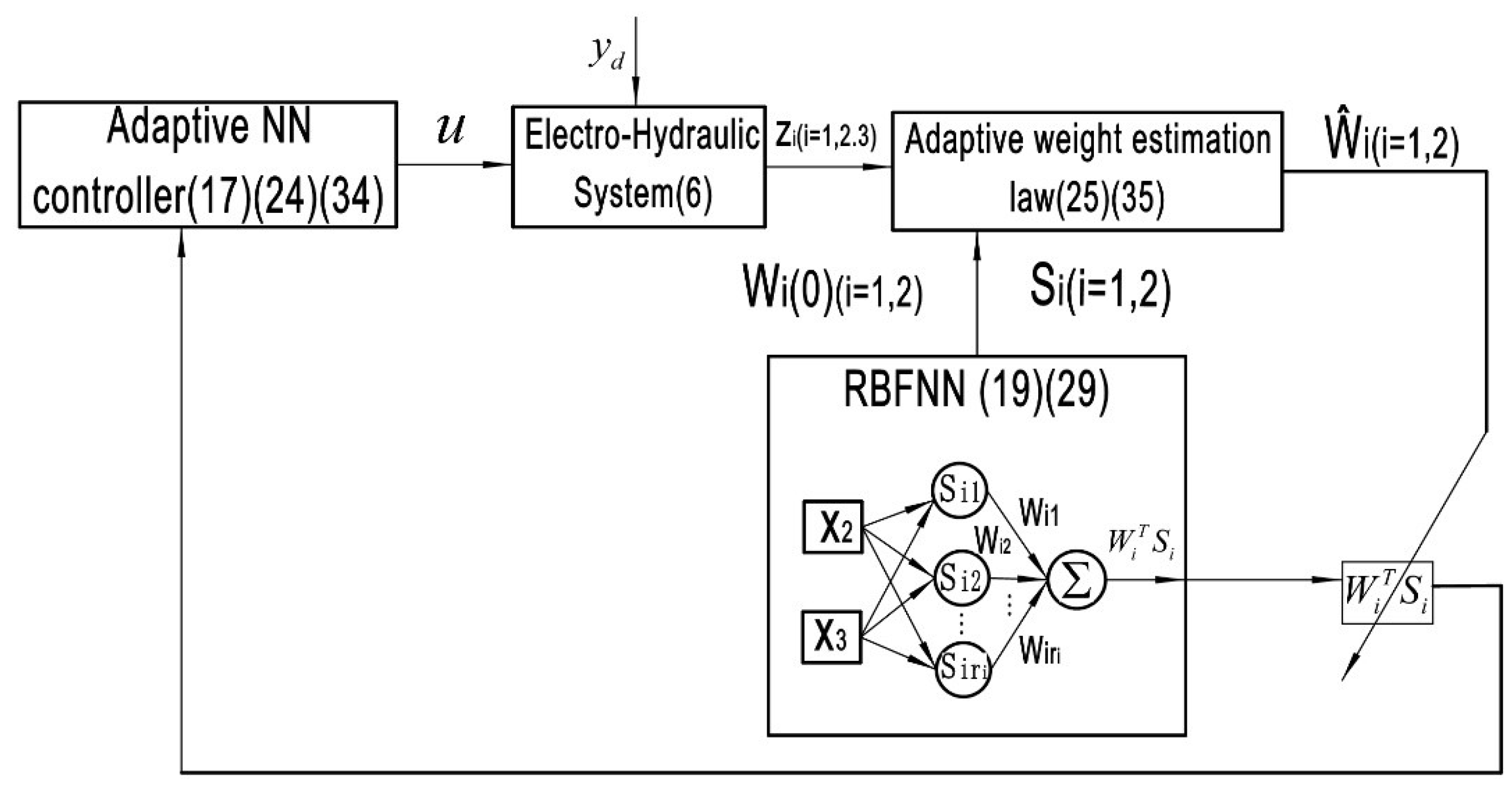
2.2. Radial Basis Function Neural Networks
3. The Controller Design and Stability Analysis
3.1. Controller Design
3.2. Stability Analysis
- 1.
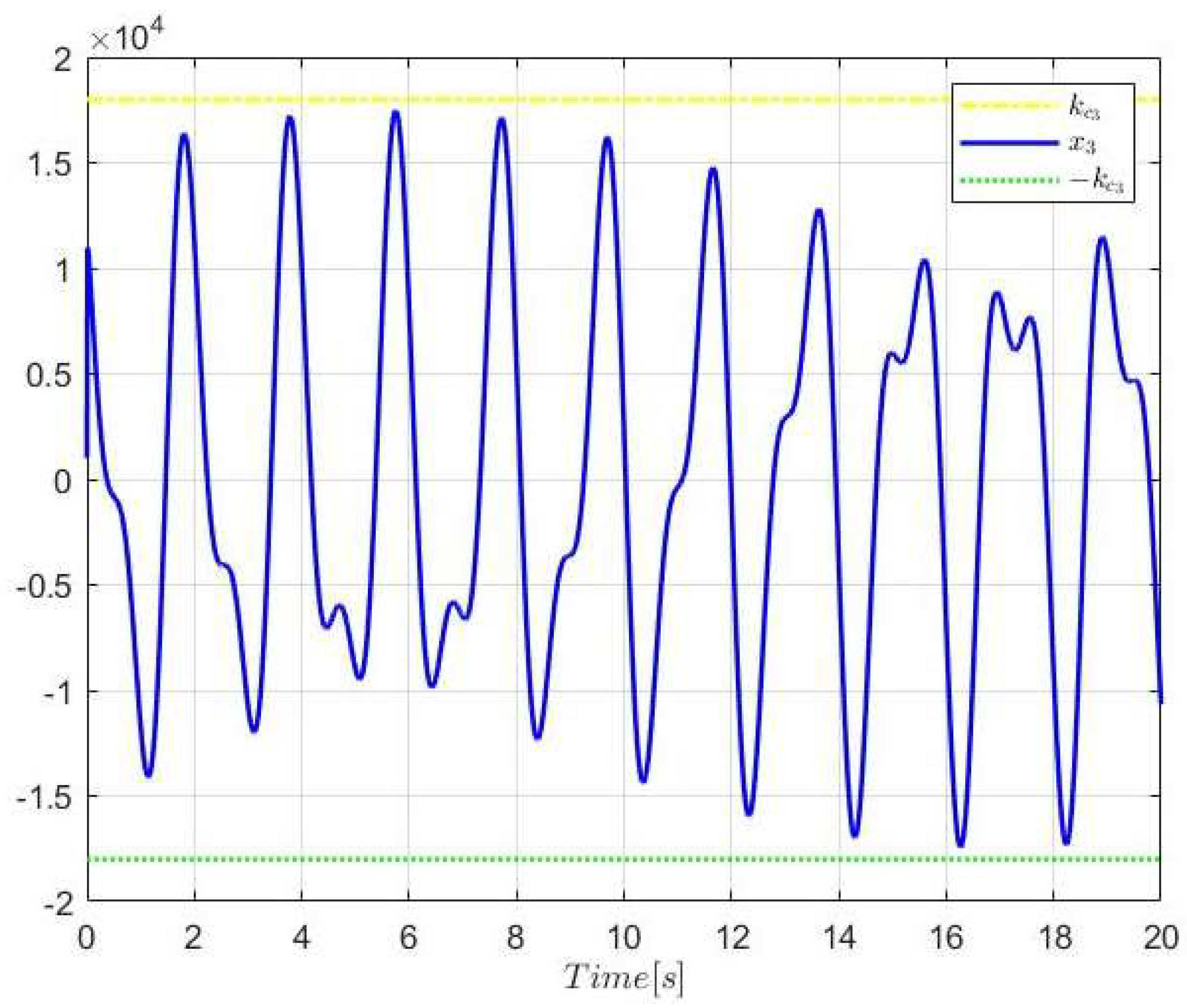
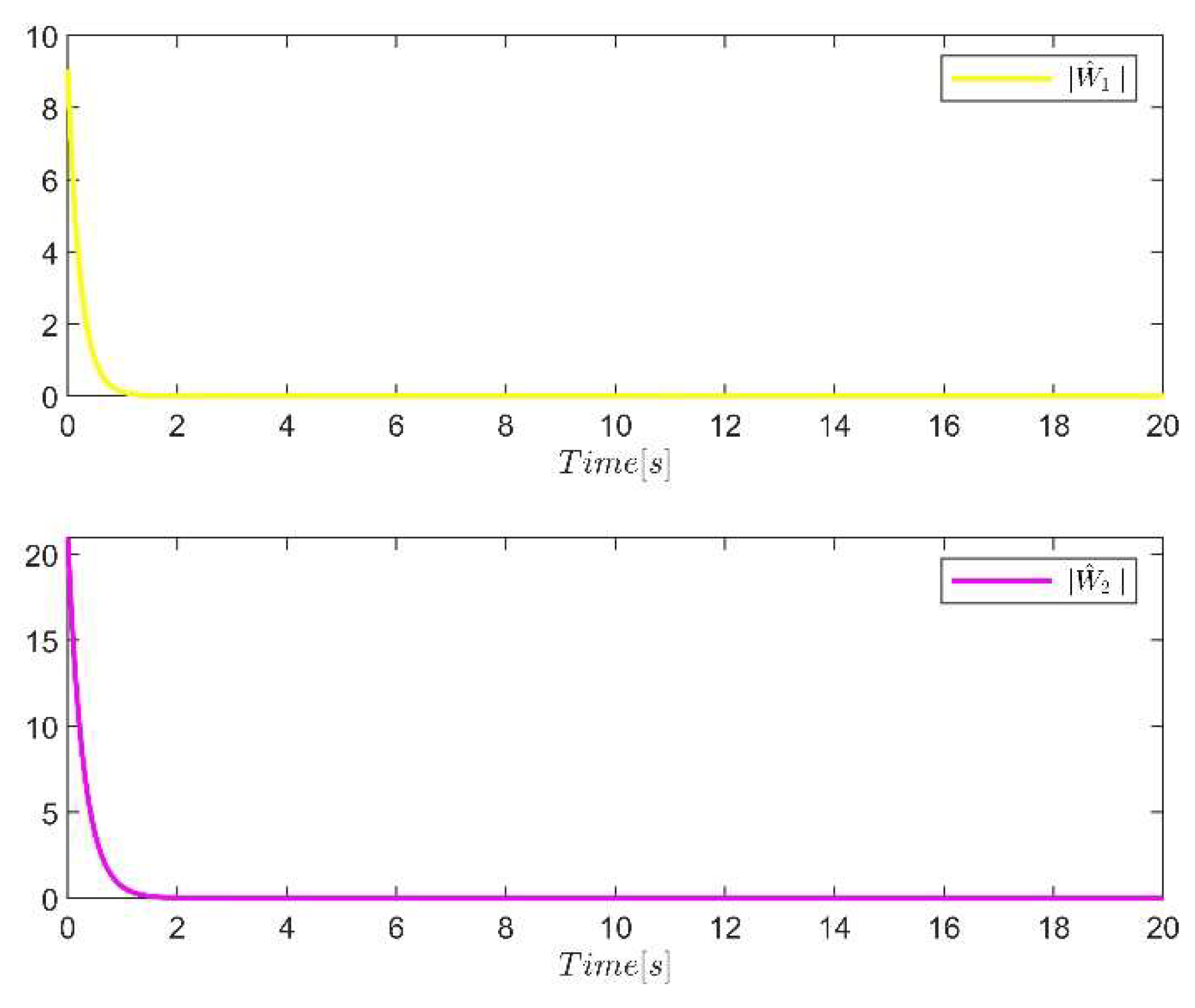
- All the variables in the closed-loop system are bounded and are always confined in their respective compact sets;
- 2.
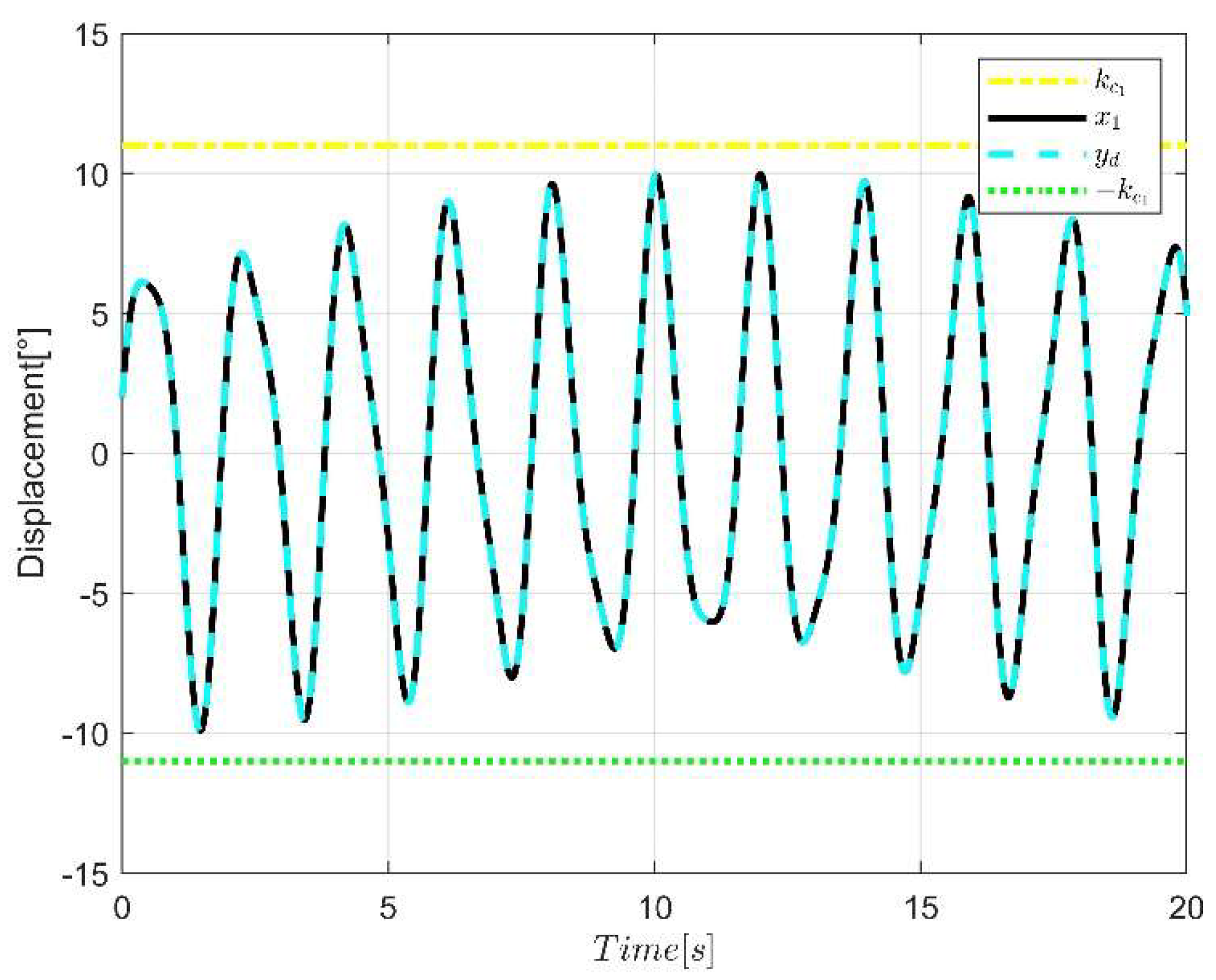
- The tracking error converges to a neighborhood of zero, which can be made arbitrarily small by appropriately selecting design parameters.
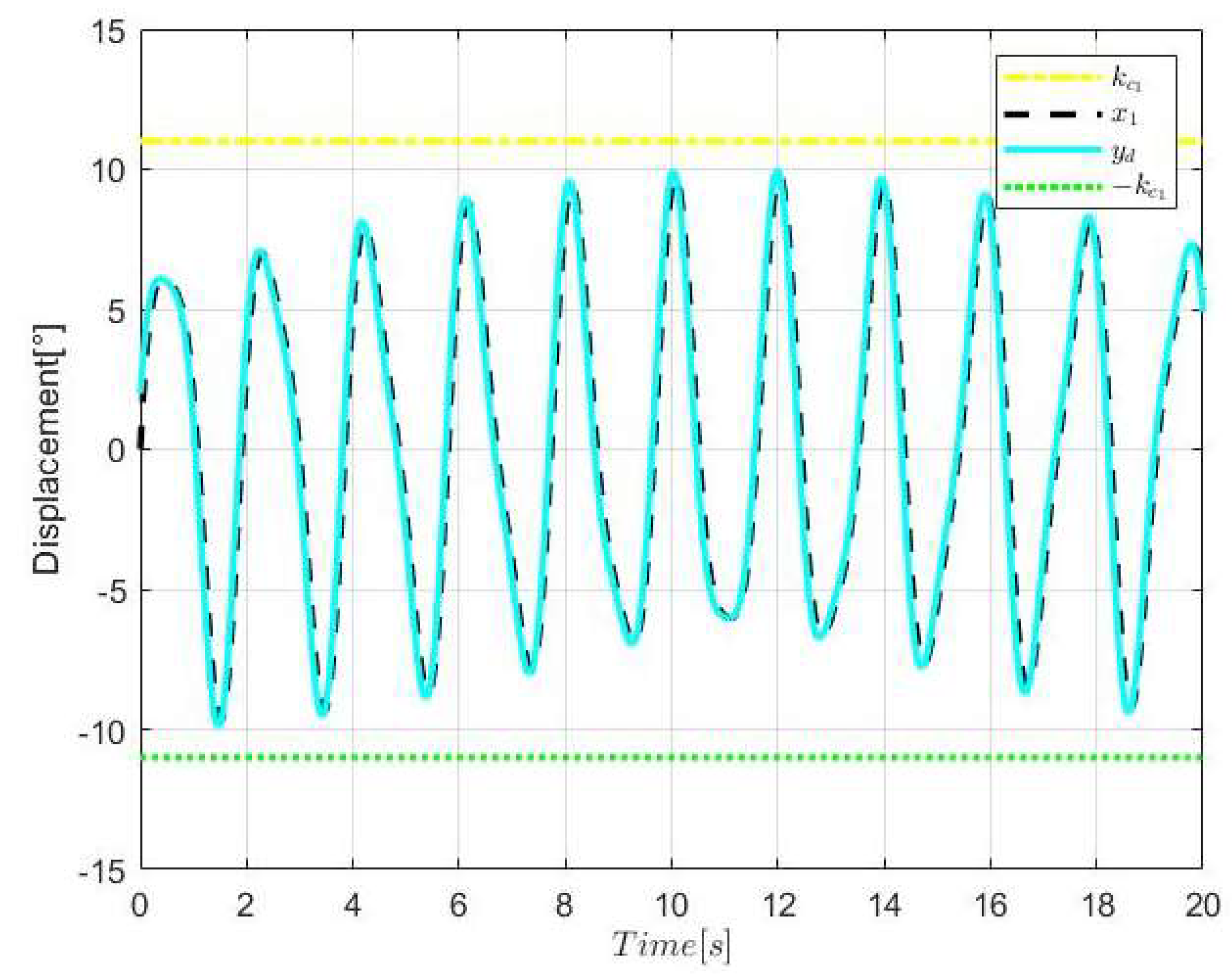
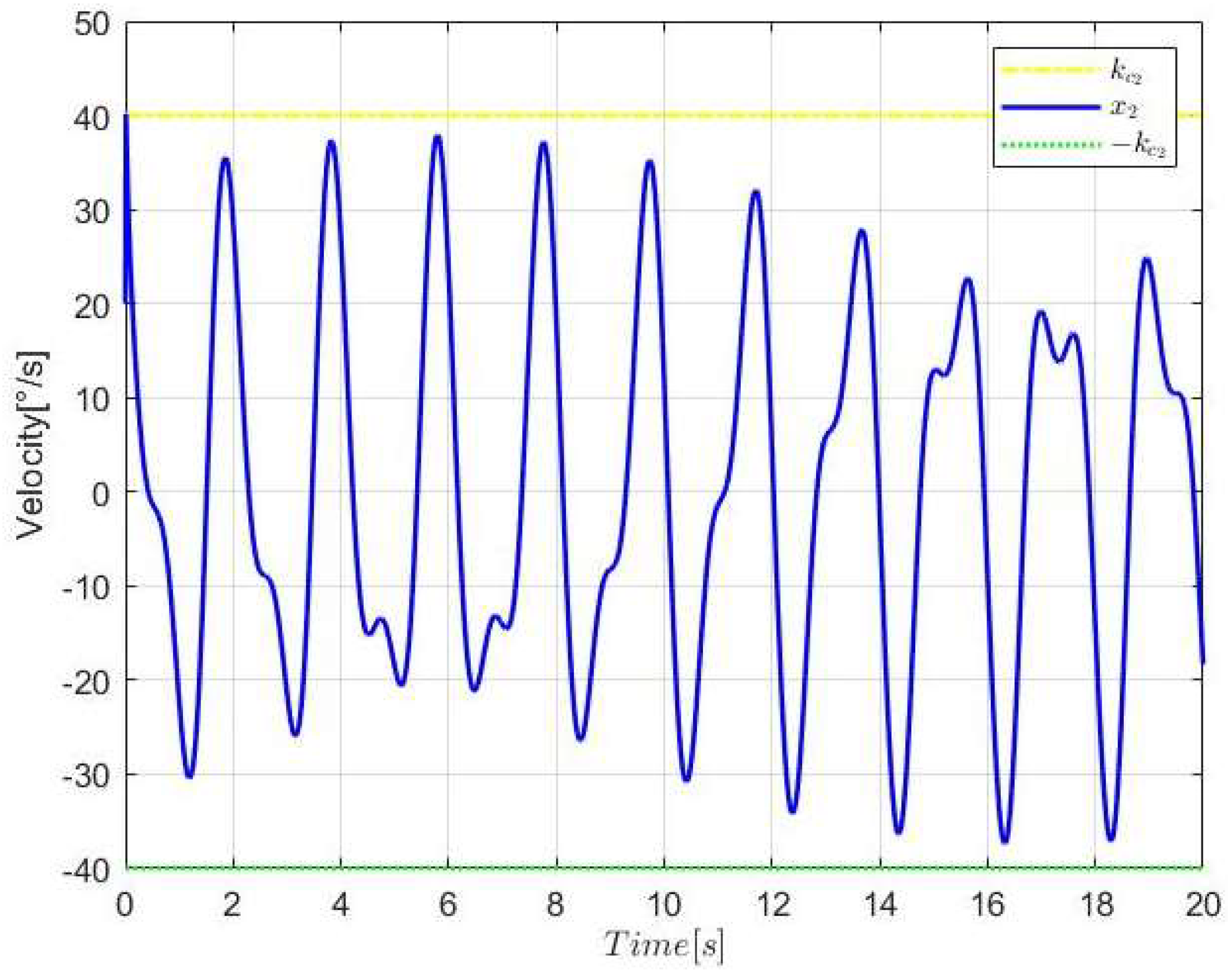
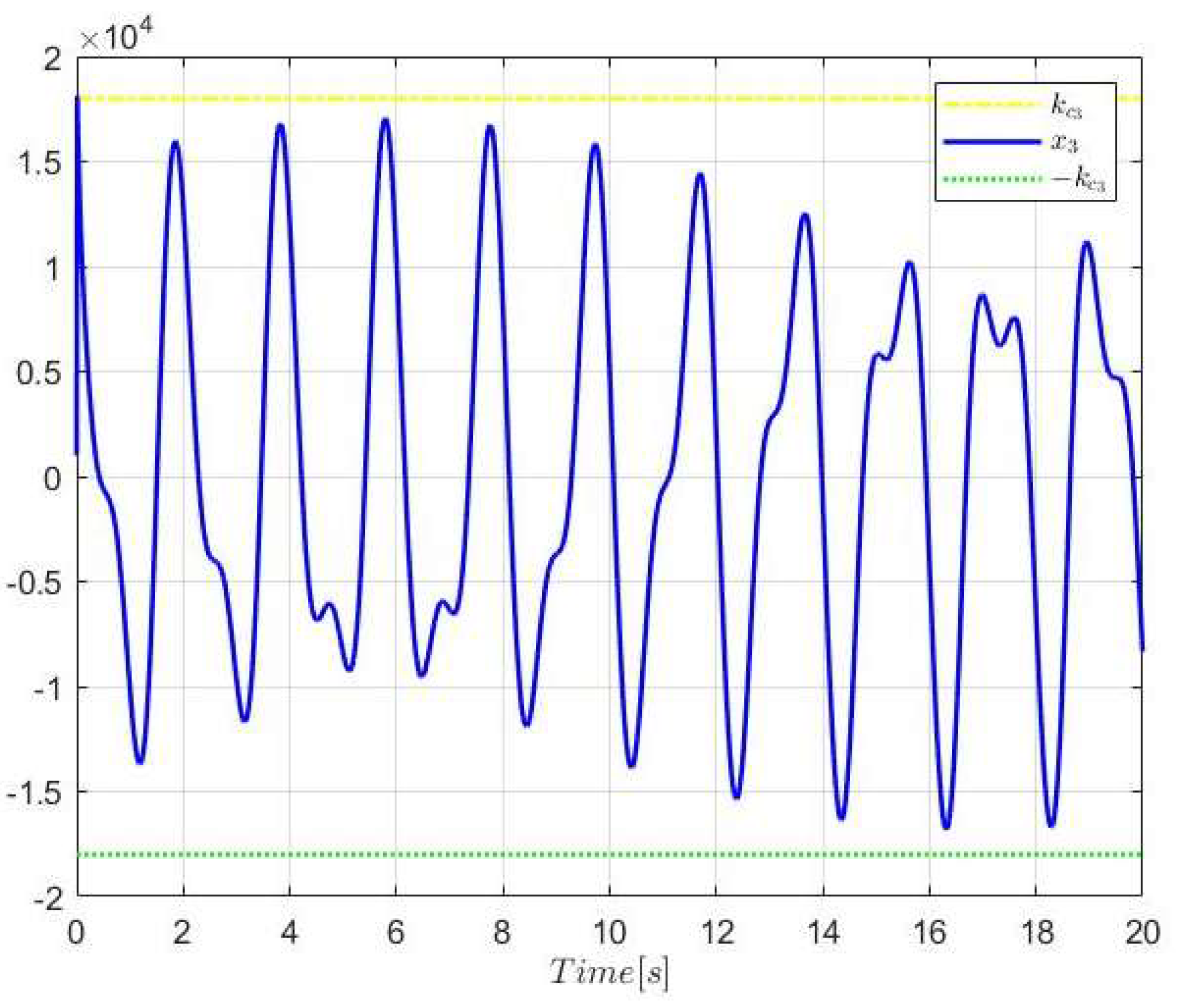
4. Simulation Studies
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Guan, C.; Pan, S. Nonlinear adaptive robust control of single-rod electro-hydraulic actuator with unknown nonlinear parameters. IEEE Trans. Control Syst. Technol. 2008, 16, 434–445. [Google Scholar] [CrossRef]
- Guan, C.; Pan, S. Adaptive sliding mode control of electro-hydraulic system with nonlinear unknown parameters. Control Eng. Pract. 2008, 16, 1275–1284. [Google Scholar] [CrossRef]
- Ding, R.; Cheng, M.; Jiang, L.; Hu, G. Active fault-tolerant control for electro-hydraulic systems with an independent metering valve against valve faults. IEEE Trans. Ind. Electron. 2021, 68, 7221–7232. [Google Scholar] [CrossRef]
- Guo, Q.; Zhang, Y.; Celler, B.G.; Su, S.W. Backstepping control of electro-hydraulic system based on extended-state-observer with plant dynamics largely unknown. IEEE Trans. Ind. Electron. 2016, 63, 6909–6920. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. Extended-state-observer-based output feedback nonlinear robust control of hydraulic systems with backstepping. IEEE Trans. Ind. Electron. 2014, 61, 6285–6293. [Google Scholar] [CrossRef]
- Yao, B.; Bu, F.; Reedy, J.; Chiu, G.T.C. Adaptive robust motion control of single-rod hydraulic actuators: Theory and experiments. IEEE/ASME Trans. Mechatron. 2000, 5, 79–91. [Google Scholar]
- Yao, J.; Jiao, Z.; Ma, D.; Yan, L. High-accuracy tracking control of hydraulic rotary actuators with modelling uncertainties. IEEE/ASME Trans. Mechatron. 2014, 19, 633–641. [Google Scholar] [CrossRef]
- Yao, J.; Jiao, Z.; Ma, D. A practical nonlinear adaptive control of hydraulic servomechanisms with periodic-like disturbances. IEEE/ASME Trans. Mechatron. 2015, 20, 2752–2760. [Google Scholar] [CrossRef]
- Won, D.; Kim, W.; Shin, D.; Chung, C.C. High-gain disturbance observer-based backstepping control with output tracking error constraint for electro-hydraulic systems. IEEE Trans. Control Syst. Technol. 2015, 23, 787–795. [Google Scholar] [CrossRef]
- Nie, S.; Qian, L.; Chen, L.; Tian, L.; Zou, Q. Barrier Lyapunov functions-based dynamic surface control with tracking error constraints for ammunition manipulator electro-hydraulic system. Def. Technol. 2021, 17, 836–845. [Google Scholar] [CrossRef]
- Song, Y.; Hu, Z.; Ai, C. Fuzzy Compensation and Load Disturbance Adaptive Control Strategy for Electro-Hydraulic Servo Pump Control System. Electronics 2022, 11, 1159. [Google Scholar] [CrossRef]
- Botmart, T.; Sabir, Z.; Raja, M.A.Z.; Weera, W.; Sadat, R.; Ali, M.R. A Numerical Study of the Fractional Order Dynamical Nonlinear Susceptible Infected and Quarantine Differential Model Using the Stochastic Numerical Approach. Fractal Fract. 2022, 6, 139. [Google Scholar] [CrossRef]
- Sabir, Z.; Botmart, T.; Raja, M.A.Z.; Weera, W.; Sadat, R.; Ali, M.R.; Alsulami, A.A.; Alghamdi, A. Artificial neural network scheme to solve the nonlinear influenza disease model. Biomed. Signal Processing Control 2022, 75, 103594. [Google Scholar] [CrossRef]
- Sabir, Z.; Baleanu, D.; Ali, M.R.; Sadat, R. A novel computing stochastic algorithm to solve the nonlinear singular periodic boundary value problems. Int. J. Comput. Math. 2022. [CrossRef]
- Zhang, Z.; Peng, L.; Zhang, J.; Wang, X. Finite-Time Neural Network Fault-Tolerant Control for Robotic Manipulators under Multiple Constraints. Electronics 2022, 11, 1343. [Google Scholar] [CrossRef]
- Costa Branco, P.J.; Dente, J.A. On using fuzzy logic to integrate learning mechanisms in an electro-hydraulic system. I. actuator’s fuzzy modeling. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 2000, 30, 305–316. [Google Scholar]
- Guo, Q.; Chen, Z. Neural adaptive control of single-rod electrohydraulic system with lumped uncertainty. Mech. Syst. Signal Processing 2021, 146, 106869. [Google Scholar] [CrossRef]
- Min, H.; Xu, S.; Zhang, Z. Adaptive finite-time stabilization of stochastic nonlinear systems subject to full-state constraints and input saturation. IEEE Trans. Autom. Control 2021, 66, 1306–1313. [Google Scholar] [CrossRef]
- Chen, S.; Wu, Y.; Luk, B.L. Combined genetic algorithm optimization and regularized orthogonal least squares learning for radial basis function networks. IEEE Trans. Neural Netw. 1999, 10, 1239–1243. [Google Scholar] [CrossRef] [Green Version]
- Li, Y.; Wang, T.; Liu, W.; Tong, S. Neural network adaptive output-feedback optimal control for active suspension systems. IEEE Trans. Syst. Man Cybern. Syst. 2021, 1–12. [Google Scholar] [CrossRef]
- Li, Y.; Liu, Y.; Tong, S. Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Transactions on Neural Networks and Learning Systems 2021, 1–15. [Google Scholar] [CrossRef] [PubMed]
- Ren, B.; Ge, S.S.; Tee, K.P.; Lee, T.H. Adaptive neural control for output feedback nonlinear systems using a barrier Lyapunov function. IEEE Trans. Neural Netw. 2010, 21, 1339–1345. [Google Scholar] [PubMed]
- Liu, Y.-J.; Li, J.; Tong, S.; Chen, C.L.P. Neural network control-based adaptive learning design for nonlinear systems with full-state constraints. IEEE Trans. Neural Netw. Learn. Syst. 2016, 27, 1562–1571. [Google Scholar] [CrossRef] [PubMed]
- Liu, Y.-J.; Zhao, W.; Liu, L.; Li, D.; Tong, S.; Chen, C.L.P. Adaptive Neural Network Control for a Class of Nonlinear Systems with Function Constraints on States. IEEE Trans. Neural Netw. Learn. Syst. 2021, 1–10. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Physical Parameter | Value |
|---|---|
| Parameters | Values | |
|---|---|---|
| Parameters of the virtual and actual controllers | ||
| Parameters of parameter adaptive laws | ||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jiang, C.; Sui, S.; Tong, S. Adaptive NN Control of Electro-Hydraulic System with Full State Constraints. Electronics 2022, 11, 1483. https://doi.org/10.3390/electronics11091483
Jiang C, Sui S, Tong S. Adaptive NN Control of Electro-Hydraulic System with Full State Constraints. Electronics. 2022; 11(9):1483. https://doi.org/10.3390/electronics11091483
Chicago/Turabian StyleJiang, Chenyang, Shuai Sui, and Shaocheng Tong. 2022. "Adaptive NN Control of Electro-Hydraulic System with Full State Constraints" Electronics 11, no. 9: 1483. https://doi.org/10.3390/electronics11091483
APA StyleJiang, C., Sui, S., & Tong, S. (2022). Adaptive NN Control of Electro-Hydraulic System with Full State Constraints. Electronics, 11(9), 1483. https://doi.org/10.3390/electronics11091483