
Resilience of Reed-Solomon Codes against Single-Frequency Electromagnetic Disturbances: Fault Mechanisms and Fault Elimination through Symbol Inversion

 , , , , and
, , , , and
Abstract
:1. Introduction
2. Reed–Solomon Codes
3. Performance Metrics
- Is the output data word correct?Possible Answers: Positive or NegativeTo answer this question, comparing the input data word and the output data word of the decoder is required. In this regard, this paper uses a common ground truth for the input and the output data. Correspondingly, if they match, then the answer is “Positive”. Otherwise, the answer is “Negative”. In this paper, when the output is unknown or, in other words, when there is no output, it is also considered as a “Negative”.
- Is the detector outcome correct after considering the output of the previous question?Possible Answers: True or FalseAs indicated, the answer of this question is directly connected to the previous question and the assumption made by [21]. In this assumption, when the output of the question 1 is positive, then there should be no detection (i.e., no warning), and when the output is negative, then a detection should occur (i.e., system receives a warning). In the case of RS Codes, the detection process happens when it calculates the syndrome. If the output of question 1 is positive, then it means that there were no errors during the transmission, and there must be no detection (i.e., zero syndrome) in such a case. Likewise, if the output of question 1 is negative, it indicates that there was at least an error during the transmission, and the detector must send a warning (i.e., non-zero syndrome). In both cases, the answer of this question is “True”, and any other scenarios state an incorrect detection or a “False” detection.
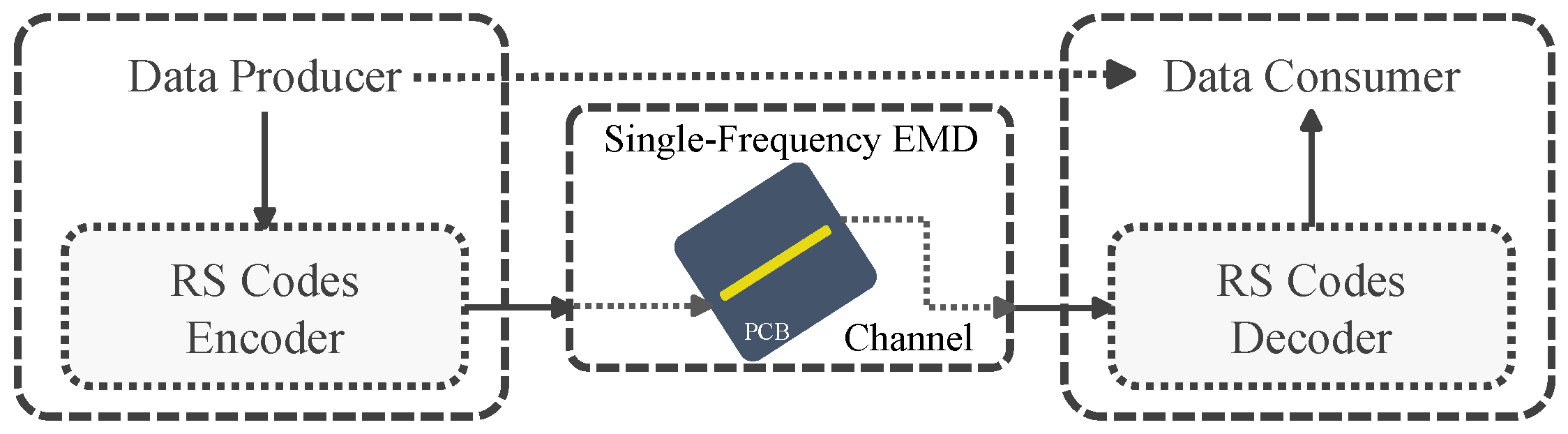
- Is the data in control or the channel in control?Possible Answers: Data or ChannelTo tackle this question, determining the impacts of the disturbances on the outputs of the decoder is required. In this regard, when a disturbance can corrupt at least two valid code words during the transmission in such a way that the output of the decoder for these code words remains the same, then the “Channel” is in control. Otherwise, the “Data” is in control, and it determines the output of the decoder.
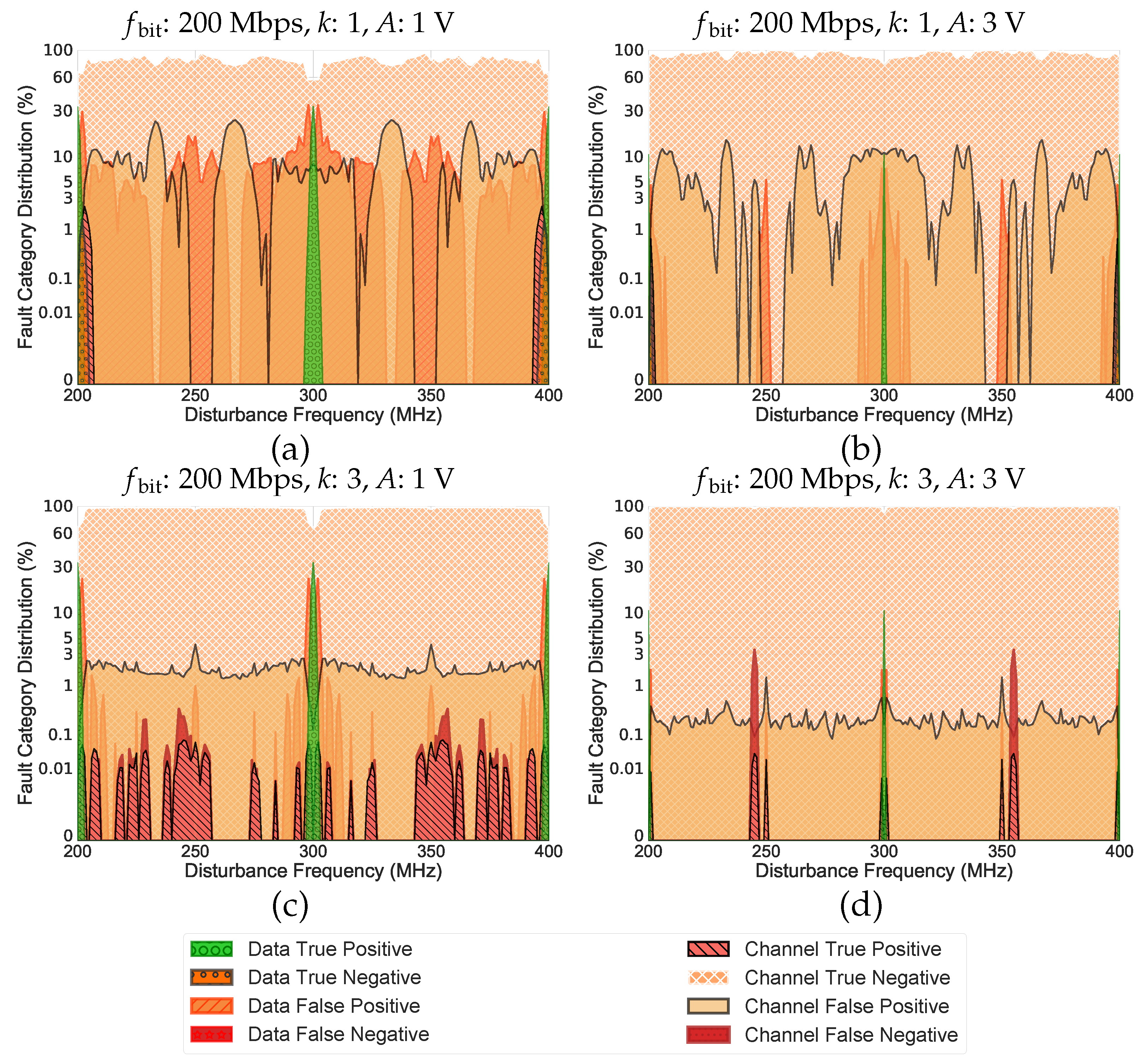
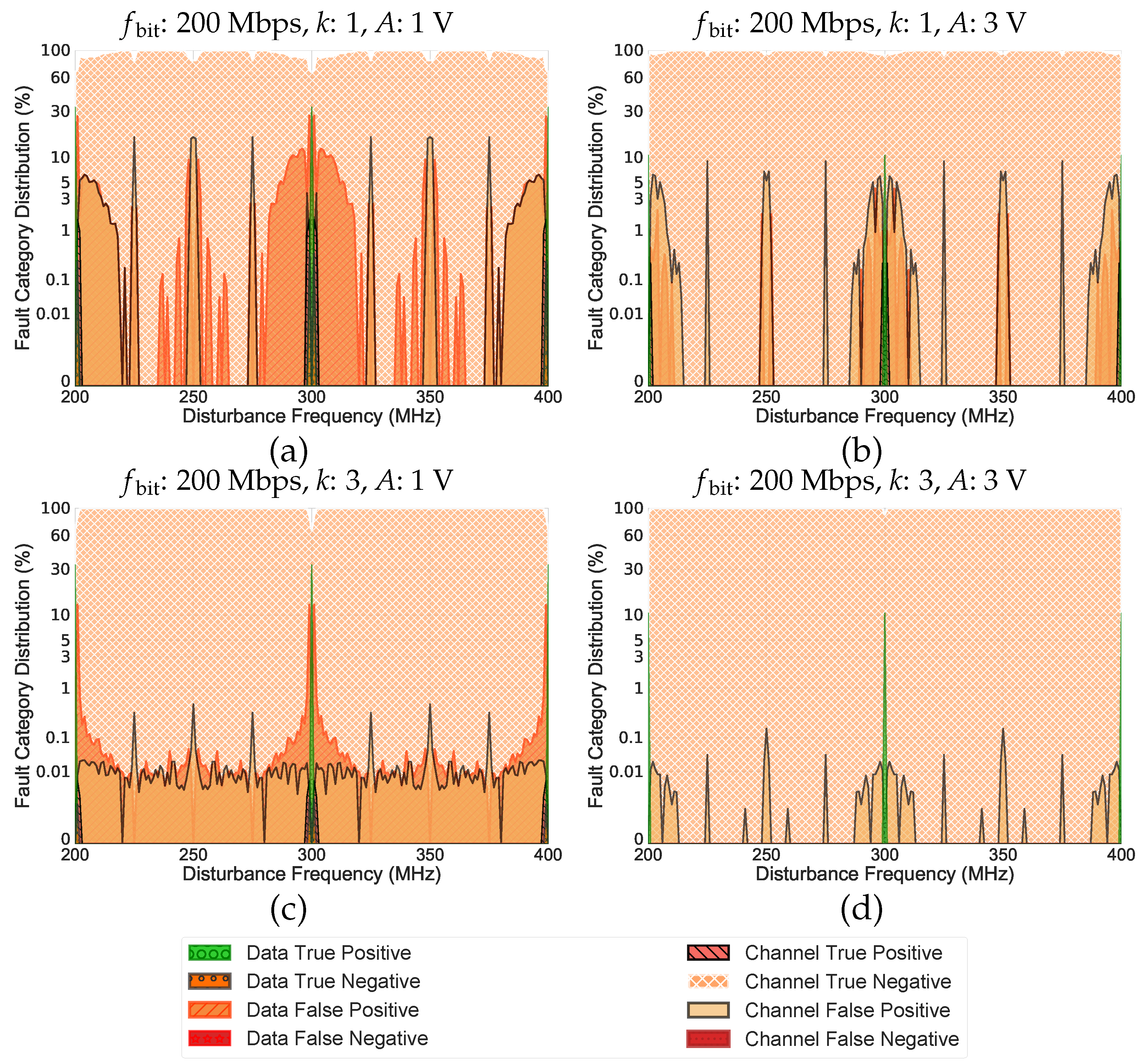
- Data True Positive (DTP): The data are in control and determine the output, the received output is correct, and the detector outcome is also correct. This is the best scenario. In such a case, the syndrome is zero, which indicates that the code word has not been affected by the disturbance. Accordingly, it shows that the channel is in a good health, and there is no immediate indication that the subsequent transmitted data would be wrong. This is the normal behavior and is labeled in green.
- Data True Negative (DTN): The data are in control and determine the output, and the received output is incorrect, even though the detector outcome is correct. In this case, the syndrome is nonzero, which indicates that the code word has been affected by the disturbance, and the RS Codes’ detector was able to detect the errors. Three possible scenarios could result in this category. First, when the number of the detected errors is in the RS Codes’ correcting capability, RS Codes miscorrect the corrupted data. In general, in case of a detection, the RS Codes choose a valid code word with the minimum symbol distance (i.e., number of symbol-wise differences between two code words) to the corrupted code word. In some cases, due to the high level of data corruption, the code word turns into another code word that has a minimum symbol distance to a valid code word but not the expected one, and RS Codes mistakenly choose that as the output. Accordingly, this results in a true negative.Second, when the number of the detected errors is beyond the RS Codes’ correcting capability, RS Codes detect that no correction can be applied.Third, when the number of errors is beyond the RS Codes’ correcting capability, RS Codes falsely assume it is within their capability. Despite this false assumption, RS Codes could not produce any output. In such a case, the code word becomes corrupted, but in a way that there are more than one valid code word with the same minimum symbol distance to the corrupted code word. As a result, this leads to an uncertainty on providing the output, and in the case of RS Codes, uncertainty results in no output.It should be noted that, in the second and third scenarios, RS Codes can be designed in such a way to stop the transmission and switch the system to a minimum-risk state. Nevertheless, in all scenarios, the system receives warnings that are desired. This category is labeled in a shade of orange.
- Data False Positive (DFP): The data are in control and determine the output, and the received output is correct albeit the detector outcome is incorrect. In such a scenario, although the received output is correct, the syndrome is nonzero, which indicates that the code word has been affected by the disturbance. This could happen when RS Codes detect that something went wrong during the transmission and correct the corrupted data. However, the receiver is unable to determine if the correction is valid and the system receives a warning. Based on the initiated assumption, in the case of a positive output, no detection should happen. Furthermore, although the output still depends on the data, it is an indication that the channel’s health might degrade in the future. This category is labeled in a shade of orange.
- Data False Negative (DFN): The data are in control and determine the output, the received output is incorrect, and the detector outcome is incorrect. In this case, the data producer is either hacked or interfered internally. This is a very dangerous scenario in which the received data will be used without any warning. As a result, the system is unaware that the received data word is wrong, and the system receives no warning. Although this category is detrimental to the overall system safety, it could not occur under the considered fault model as, within this paper, the data producer and the data consumer are assumed to be protected from any EMD or internal hacking. In case this category happens under different environments or setups, it should be labeled in a shade of red.
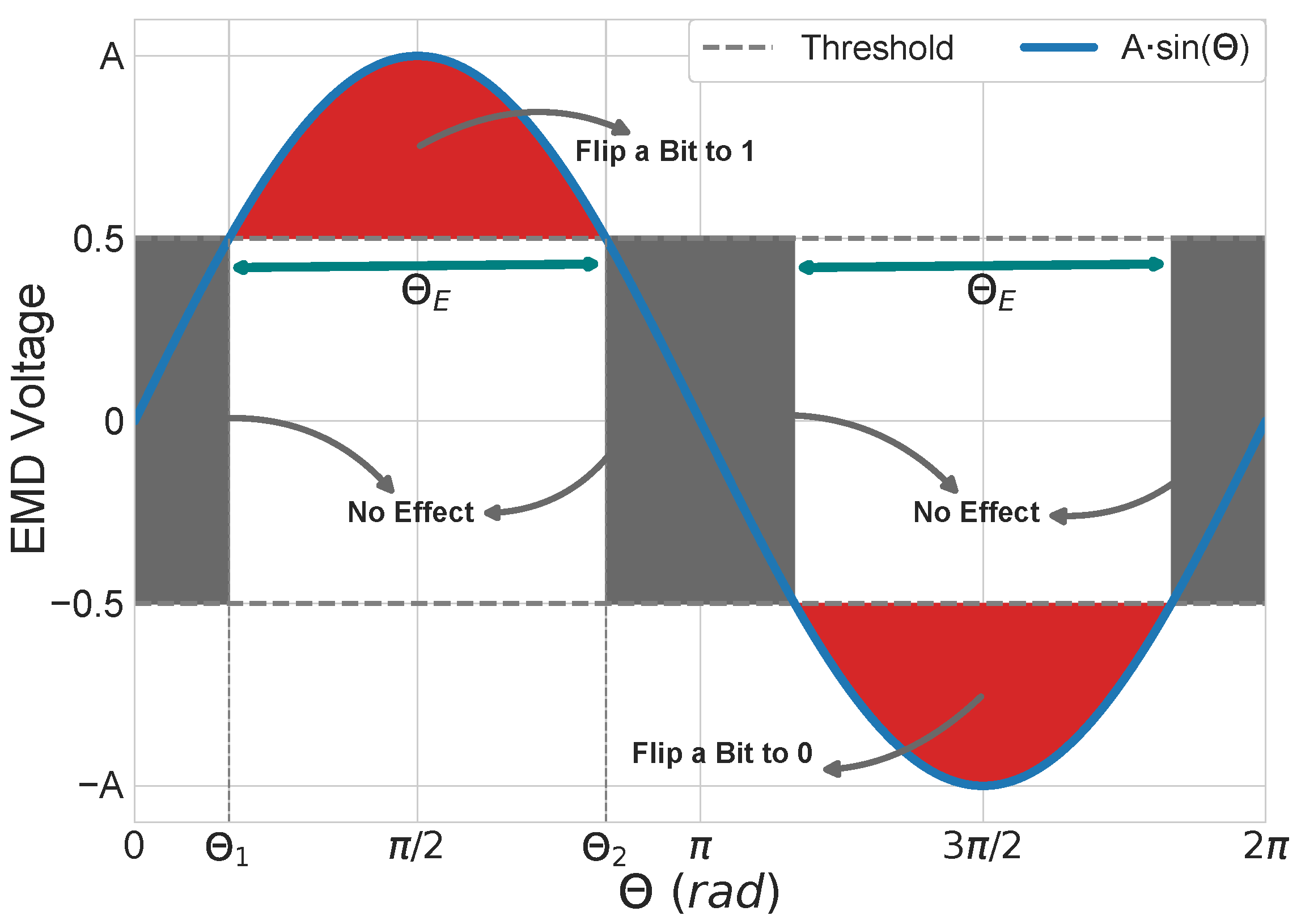
- Channel True Positive (CTP): The channel is in control and determines the output, the received output is correct, and the detector outcome is also correct. As pointed out, when the channel is in control, the EMDs or any other external factor enforce a logical ‘1’ or ‘0’, regardless of what has been transmitted by the data producer. Accordingly, if the data producer sends a ‘1’ (or ‘0’) while the channel enforces a ‘1’ (or ‘0’), and no detection is occurred by the detector, then a true positive would happen. In other words, CTP happens when the data producer sends a same value as the enforced value by the channel. This indicates a pure luck (i.e., 50% chance to end up as a logical ‘1’ or ‘0’) since if the data producer would have sent a ‘0’ instead and the detector did not detect it, then it would have ended up as a false negative. Therefore, this category must be considered as dangerous as a false negative. Correspondingly, it is labeled in a shade of red.
- Channel True Negative (CTN): The channel is in control and determines the output, and the received output is incorrect, even though the detector outcome is correct. This category is triggered by the same scenarios indicated for DTN. Furthermore, similar to DTN, the system receives warning which is desired. This category is labeled in a distinct shade of orange;
- Channel False Positive (CFP): The channel is in control and determines the output, and the received output is correct albeit the detector outcome is incorrect. This category is triggered by the same scenarios stated for DFP, but in these scenarios, the channel is in control. As a result, it reduces the safety of the system. Since the system receives a warning in these scenarios, this category is also labeled in a shade of orange.
- Channel False Negative (CFN): The channel is in control and determines the output, the received output is incorrect, and the detector outcome is incorrect. This is a very dangerous scenario, since the channel turns the input data into other valid data, and RS Codes assume that all is right (i.e., the calculated syndrome is zero). In such a case, the system is unaware that the received data word is incorrect and, thus, no countermeasures can be taken. Consequently, this undetected category could result in critical failures. Accordingly, this category is considered detrimental to the overall system safety and is, therefore, labeled in a shade of red.
4. Reed–Solomon Codes Effectiveness against Single-Frequency EMD
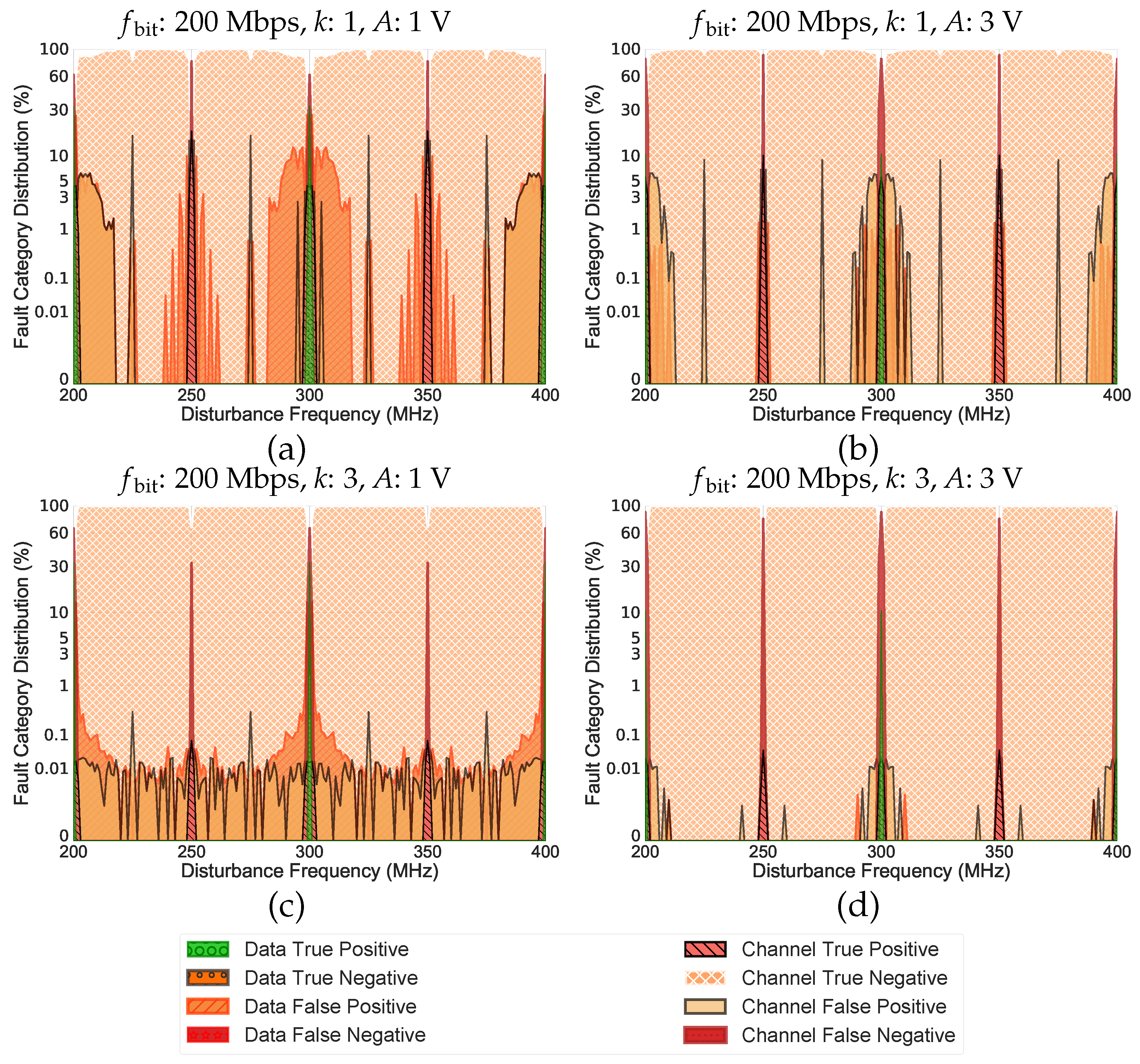
4.1. Peaks of the Undetected Corrupted Data
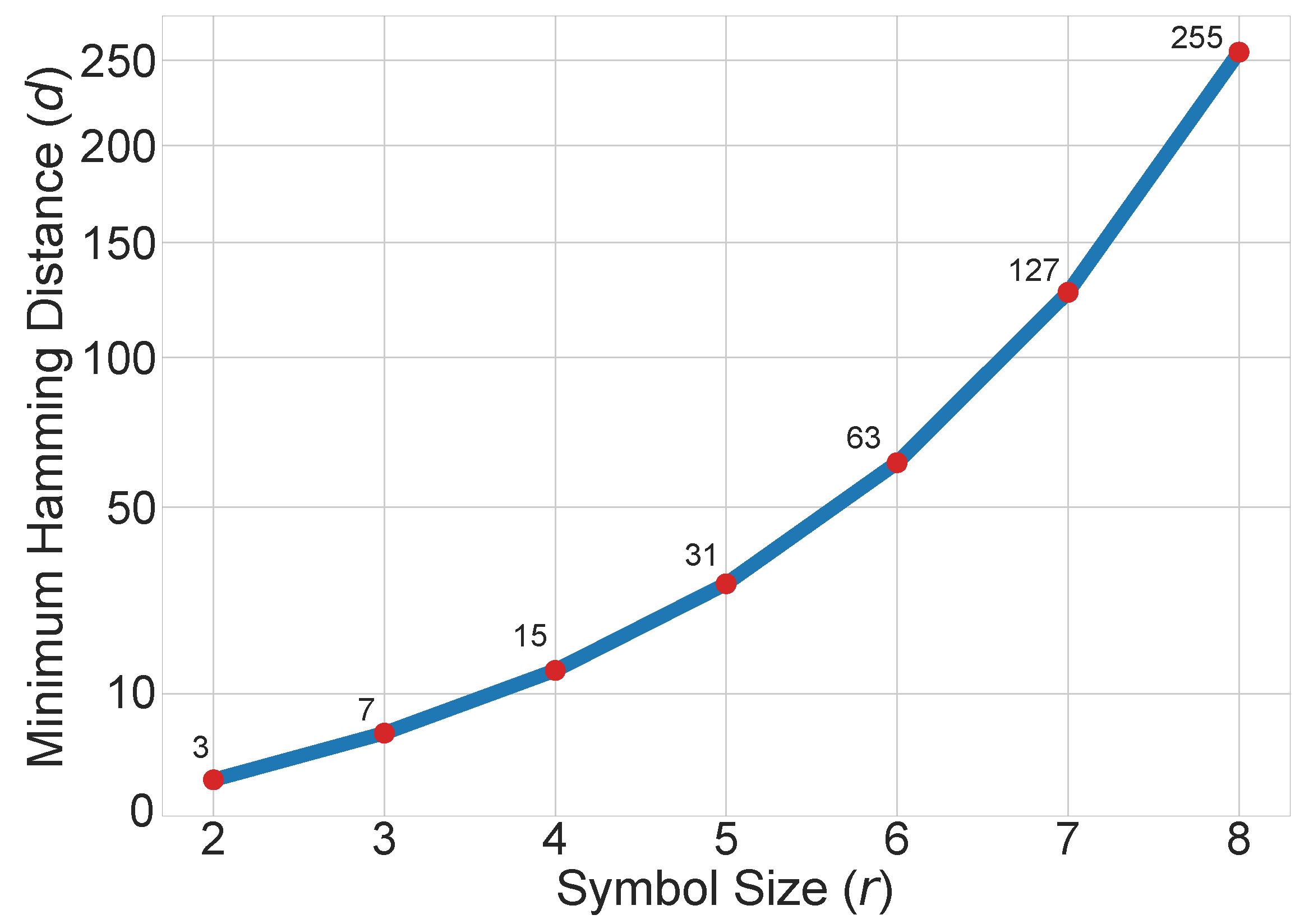
4.2. Impact of the Symbol Size
4.3. Impact of the Message Length
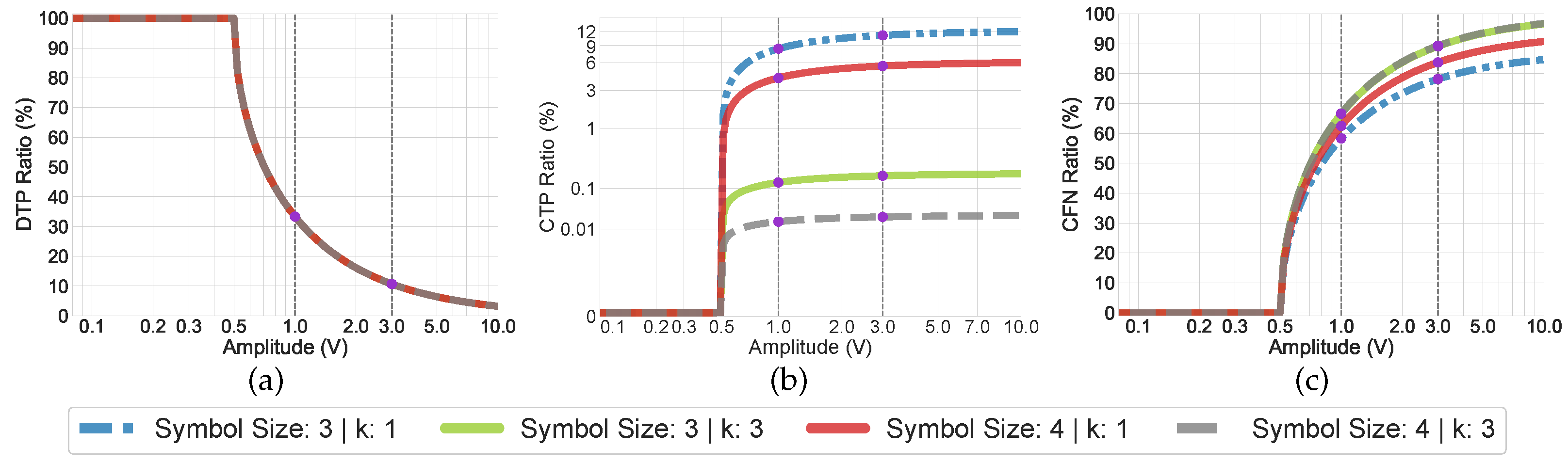
4.4. Impact of the EMD Amplitude
5. EMD-Resilient Reed–Solomon Codes
5.1. Single Symbol Inversion
5.2. Overall Performance of the Proposed Layer
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A. Simulation Example

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| # | Amplitude | fEMD | Input | Transmitted | Received | Possible Output | Output | Category |
|---|---|---|---|---|---|---|---|---|
| (V) | (MHz) | Data Word | Code Word | Code Word | Code Word(s) | Data Word | ||
| 1 | 1 | 300 | DTP | |||||
| 2 | 0.6 | 280 | DTN | |||||
| 3 | 1 | 204 | DFP | |||||
| 4 | 1 | 200 | CTP | |||||
| 5 | 1 | 202 | CTN | |||||
| 6 | 1 | 250 | NA | CTN | ||||
| 7 | 1 | 204 | CFP | |||||
| 8 | 1 | 200 | CFN |

References
- Pissoort, D.; Armstrong, K. Why is the IEEE developing a standard on managing risks due to EM disturbances? In Proceedings of the 2016 IEEE International Symposium on Electromagnetic Compatibility (EMC), Ottawa, ON, Canada, 25–29 July 2016; pp. 78–83. [Google Scholar]
- Hamming, R.W. Error detecting and error correcting codes. Bell Syst. Tech. J. 1950, 29, 147–160. [Google Scholar] [CrossRef]
- Van Waes, J.; Lannoo, J.; Degraeve, A.; Vanoost, D.; Pissoort, D.; Boydens, J. Effectiveness of cyclic redundancy checks under harsh electromagnetic disturbances. In Proceedings of the 2017 International Symposium on Electromagnetic Compatibility-EMC EUROPE, Angers, France, 4–7 September 2017; pp. 1–6. [Google Scholar]
- Van Waes, J.; Lannoo, J.; Vankeirsbilck, J.; Degraeve, A.; Peuteman, J.; Vanoost, D.; Pissoort, D.; Boydens, J. Effectiveness of hamming single error correction codes under harsh electromagnetic disturbances. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE), Amsterdam, The Netherlands, 27–30 August 2018; pp. 271–276. [Google Scholar]
- Van Waes, J.; Vankeirsbilck, J.; Lannoo, J.; Pissoort, D.; Boydens, J. Effectiveness of data triplication in harsh electromagnetic environments. In Proceedings of the 2018 International Symposium on Electromagnetic Compatibility (EMC EUROPE), Amsterdam, The Netherlands, 27–30 August 2018; pp. 266–270. [Google Scholar]
- Van Waes, J.; Vanoost, D.; Vankeirsbilck, J.; Lannoo, J.; Pissoort, D.; Boydens, J. Resilience of Error Correction Codes against Harsh Electromagnetic Disturbances: Fault Mechanisms. IEEE Trans. Electromagn. Compat. 2020, 62, 1017–1027. [Google Scholar] [CrossRef]
- Van Waes, J.; Vanoost, D.; Vankeirsbilck, J.; Lannoo, J.; Pissoort, D.; Boydens, J. Resilience of Error Correction Codes Against Harsh Electromagnetic Disturbances: Fault Elimination for Triplication-Based Error Correction Codes. IEEE Trans. Electromagn. Compat. 2020, 62, 1929–1938. [Google Scholar] [CrossRef]
- Reed, I.S.; Solomon, G. Polynomial codes over certain finite fields. J. Soc. Ind. Appl. Math. 1960, 8, 300–304. [Google Scholar] [CrossRef]
- Al-Barrak, A.; Al-Sherbaz, A.; Kanakis, T.; Crockett, R. Enhancing BER performance limit of BCH and RS codes using multipath diversity. Computers 2017, 6, 21. [Google Scholar] [CrossRef] [Green Version]
- An, X.; Liang, Y.; Zhang, W. High-Efficient Reed-Solomon Decoder Based on Deep Learning. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020; pp. 1–5. [Google Scholar]
- Zhang, W.; Zou, S.; Liu, Y. Iterative soft decoding of reed-solomon codes based on deep learning. IEEE Commun. Lett. 2020, 24, 1991–1994. [Google Scholar] [CrossRef]
- Xing, J.; Chen, L.; Bossert, M. Low-Complexity Chase Decoding of Reed-Solomon Codes Using Module. IEEE Trans. Commun. 2020, 68, 6012–6022. [Google Scholar] [CrossRef]
- Wang, H.; Zhang, W.; Chang, Y.; Gao, J.; Liu, Y. Low-Complexity Chase Decoding of Reed–Solomon Codes Using Channel Evaluation. Entropy 2022, 24, 424. [Google Scholar] [CrossRef]
- Kumar, S.; Gupta, R. Bit error rate analysis of Reed-Solomon code for efficient communication system. Int. J. Comput. Appl. Technol. 2011, 30, 11–15. [Google Scholar]
- Mahajan, S.; Singh, G. Reed-Solomon code performance for M-ary modulation over AWGN channel. Int. J. Eng. Res. Technol. (IJEST) 2011, 3, 3739–3745. [Google Scholar]
- Korrapati, V.; Prasad, M.; Reddy, D.V.; Tej, G.A. A Study on performance evaluation of Reed Solomon Codes through an AWGN Channel model for an efficient Communication System. Int. J. Eng. Trends Technol. 2013, 4, 1038–1041. [Google Scholar]
- Nandaniya, J.S.; Kalani, N.B.; Kulkarni, G. Comparative analysis of different channel coding techniques. Int. J. Comput. Netw. Commun. (IJCNWC) 2014, 4, 84–89. [Google Scholar]
- Geisel, W.A. Tutorial on Reed-Solomon Error Correction Coding; National Aeronautics and Space Administration, Lyndon B. Johnson Space Center: Houston, TX, USA, 1990; Volume 102162.
- Peterson, W.W.; Peterson, W.; Weldon, E.J.; Weldon, E.J. Error-Correcting Codes; MIT Press: Cambridge, MA, USA, 1972. [Google Scholar]
- Memar, P.; Vankeirsbilck, J.; Vanoost, D.; Holvoet, T.; Boydens, J. Resilience of Reed-Solomon Codes Against Harsh Electromagnetic Disturbances: Influence of Over-Voltage Detection. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 868–873. [Google Scholar] [CrossRef]
- Claeys, T.; Tirmizi, H.; Habib, H.; Vanoost, D.; Vandenbosch, G.A.; Pissoort, D. A system’s perspective on the use of EMI detection and correction methods in safety critical systems. In Proceedings of the 2021 IEEE International Joint EMC/SI/PI and EMC Europe Symposium, Raleigh, NC, USA, 26 July–13 August 2021; pp. 905–910. [Google Scholar]
- Filiba, T.; Larroque, S.K. Universal Errors-and-Erasures Reed-Solomon Codec: ReedSolo. 2020. Available online: https://github.com/tomerfiliba/reedsolomon (accessed on 31 January 2021).



| Category | Channel Status | Data Status | Detector Status | Label |
|---|---|---|---|---|
| Data True Positive (DTP) | Data In Control | Uncorrupted | No Warning |  |
| Data True Negative (DTN) | Data In Control | Corrupted | Warning |  |
| Data False Positive (DFP) | Data In Control | Uncorrupted | Warning |  |
| Data False Negative (DFN) | Data In Control | Corrupted | No Warning |  |
| Channel True Positive (CTP) | Channel In Control | Uncorrupted | No Warning |  |
| Channel True Negative (CTN) | Channel In Control | Corrupted | Warning |  |
| Channel False Positive (CFP) | Channel In Control | Uncorrupted | Warning |  |
| Channel False Negative (CFN) | Channel In Control | Corrupted | No Warning |  |
| Symbol | Field | Block | Message | Correction | Hamming | |
|---|---|---|---|---|---|---|
| Size (m) | Size () | Length (n) | Length (k) | Capability (s) | Distance (d) | |
| G1 | 3 | 8 | 7 | 1 | 3 | 7 |
| 4 | 16 | 15 | 1 | 7 | 15 | |
| G2 | 3 | 8 | 7 | 3 | 2 | 5 |
| 4 | 16 | 15 | 3 | 6 | 13 |
| Setup Parameters | DTP | DTN | DFP | CTP | CTN | CFP | CFN | |
|---|---|---|---|---|---|---|---|---|
| Baseline | | | V | 0.99 | 0 | 7.38 | 1.38 | 82.2 | 4.98 | 3.06 |
| | | V | 0.21 | 0 | 0.59 | 0.82 | 90.54 | 4.08 | 3.76 | |
| | | V | 0.97 | 0 | 0.98 | 0.03 | 94.51 | 1.68 | 1.84 | |
| | | V | 0.21 | 0 | 0.04 | 0.01 | 95.66 | 0.18 | 3.91 | |
| | | V | 0.65 | 0 | 2.46 | 0.43 | 92.97 | 1.28 | 2.18 | |
| | | V | 0.21 | 0 | 0.10 | 0.28 | 95.28 | 0.98 | 3.14 | |
| | | V | 0.65 | 0 | 0.31 | 0.0 | 97.20 | 0.1 | 1.82 | |
| | | V | 0.21 | 0.0 | 0.0 | 0.0 | 97.20 | 0.0 | 2.59 | |
| EMD-Resilient | | | V | 0.99 | 0.03 | 7.35 | 0.08 | 83.40 | 8.15 | 0 |
| | | V | 0.21 | 0.00 | 0.29 | 0.01 | 94.12 | 5.37 | 0 | |
| | | V | 0.97 | 0 | 0.98 | 0.01 | 96.26 | 1.76 | 0.02 | |
| | | V | 0.21 | 0 | 0.04 | 0.00 | 99.45 | 0.23 | 0.06 | |
| | | V | 0.65 | 0.01 | 2.70 | 0.05 | 95.05 | 1.54 | 0 | |
| | | V | 0.21 | 0 | 0.16 | 0.00 | 98.66 | 0.97 | 0 | |
| | | V | 0.65 | 0.0 | 0.31 | 0.0 | 99.01 | 0.02 | 0 | |
| | | V | 0.21 | 0 | 0 | 0 | 99.79 | 0.0 | 0 |
| Corrupted Code Words | After Reverting Changes | Category |
|---|---|---|
| CFN | ||
| CFN | ||
| CTP | ||
| CFN | ||
| CFN | ||
| CFN | ||
| CFN | ||
| CFN |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Memar, P.; Vankeirsbilck, J.; Vanoost, D.; Claeys, T.; Pissoort, D.; Boydens, J. Resilience of Reed-Solomon Codes against Single-Frequency Electromagnetic Disturbances: Fault Mechanisms and Fault Elimination through Symbol Inversion. Electronics 2022, 11, 1292. https://doi.org/10.3390/electronics11091292
Memar P, Vankeirsbilck J, Vanoost D, Claeys T, Pissoort D, Boydens J. Resilience of Reed-Solomon Codes against Single-Frequency Electromagnetic Disturbances: Fault Mechanisms and Fault Elimination through Symbol Inversion. Electronics. 2022; 11(9):1292. https://doi.org/10.3390/electronics11091292
Chicago/Turabian StyleMemar, Pejman, Jens Vankeirsbilck, Dries Vanoost, Tim Claeys, Davy Pissoort, and Jeroen Boydens. 2022. "Resilience of Reed-Solomon Codes against Single-Frequency Electromagnetic Disturbances: Fault Mechanisms and Fault Elimination through Symbol Inversion" Electronics 11, no. 9: 1292. https://doi.org/10.3390/electronics11091292
APA StyleMemar, P., Vankeirsbilck, J., Vanoost, D., Claeys, T., Pissoort, D., & Boydens, J. (2022). Resilience of Reed-Solomon Codes against Single-Frequency Electromagnetic Disturbances: Fault Mechanisms and Fault Elimination through Symbol Inversion. Electronics, 11(9), 1292. https://doi.org/10.3390/electronics11091292