
Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards


Abstract
:1. Introduction
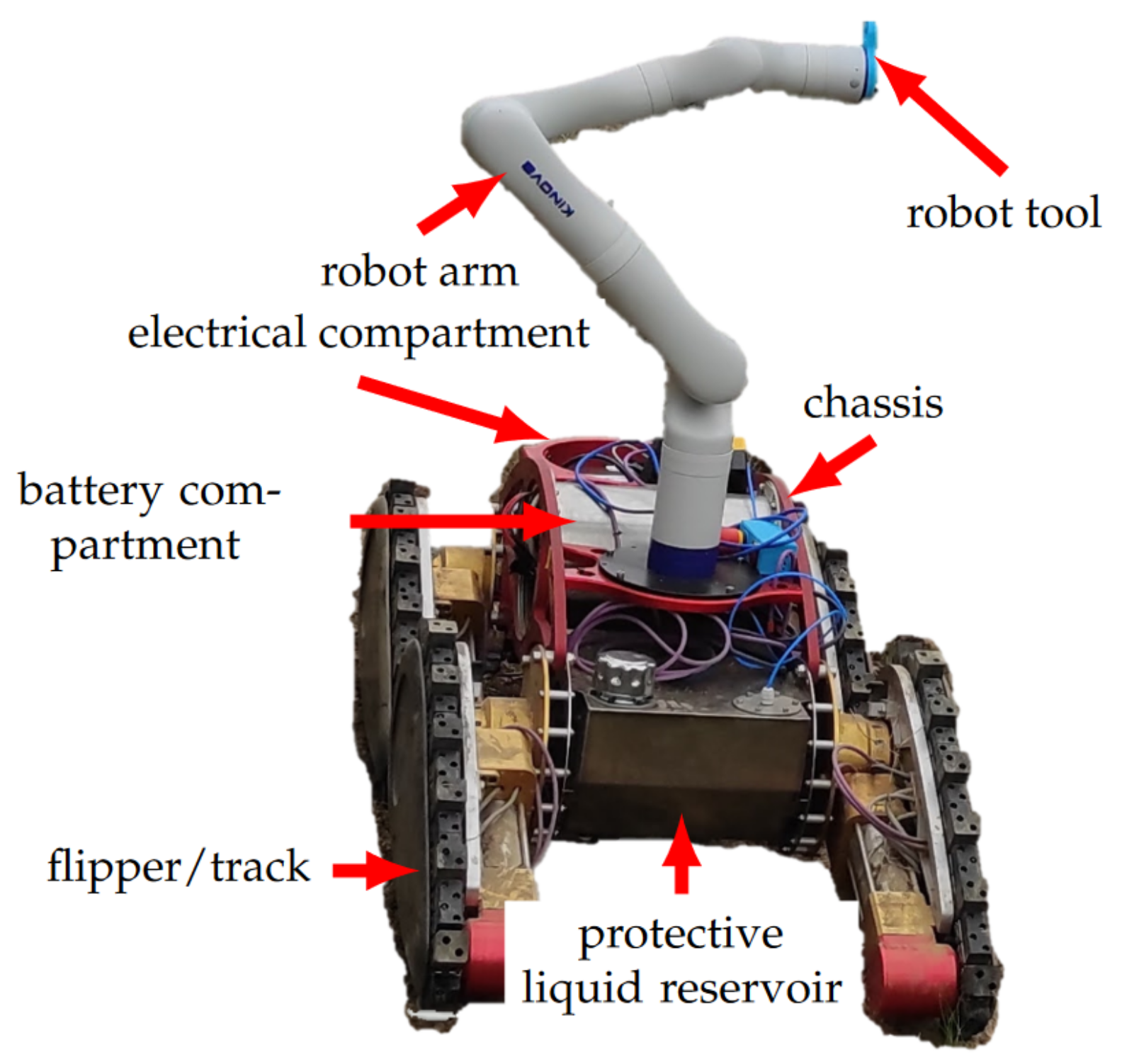
2. Heterogeneous Robotic System HEKTOR
Measures of Robot System Efficiency
- (a)
- Spraying:
- -
- How many vines can be sprayed in a robotic operation before a new tank must be filled with protective liquid?
- -
- How many vines can be sprayed in a robot deployment before a new battery charge is required?
- -
- What is the saving in protective liquid when the selective spraying is performed versus uniform?
- -
- What is the ratio of the effect of the robotic system compared to humans?
- -
- How much does the slope of the terrain affect the total number of vines sprayed and battery consumption?
- (b)
- Bud rubbing:
- -
- What is the average time required per vine to perform the task and how does it relate to human time requirements?
- -
- How many vines can be processed before the next battery charge?
- -
- How does the slope of the terrain affect the number of vines worked and battery consumption?
3. Features of Landscaped Vineyards
- Selection of a favorable geographical location;
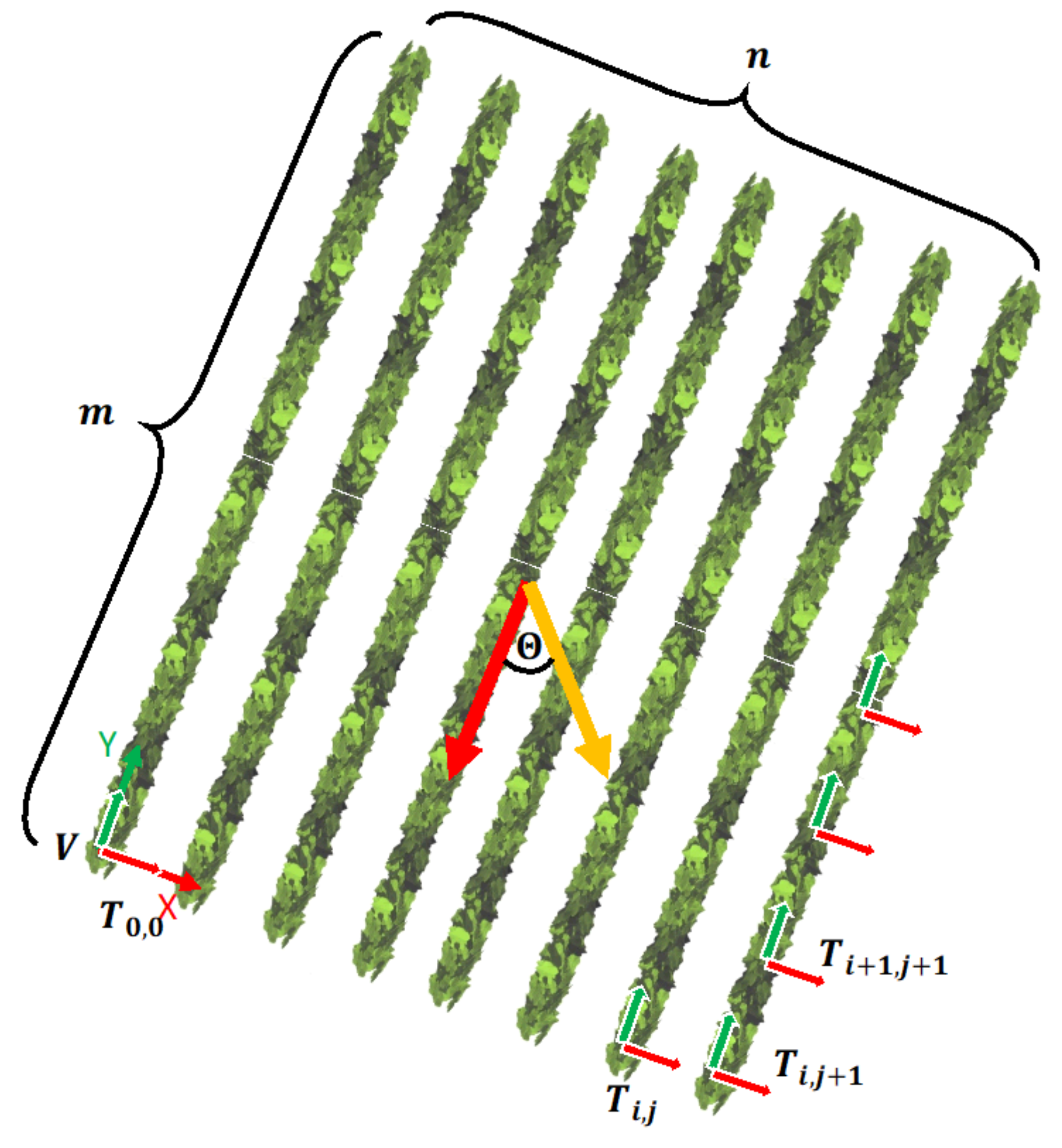
- Planting of the vines is regularly organized in rows;
- Where the nature of the terrain allows it, the vines are planted in a row at regular intervals;
- The rows of vines are planted at intervals that allow good sunlight to reach the vines and easy access to each vine when work needs to be performed in the vineyard;
- In a landscaped vineyard, the greatest possible morphological uniformity of individual vines is established in terms of plant height and width (Figure 4);
- In modern vineyards, concrete columns and wire joints and supports are used to shape the crowns of vines (Figure 5).
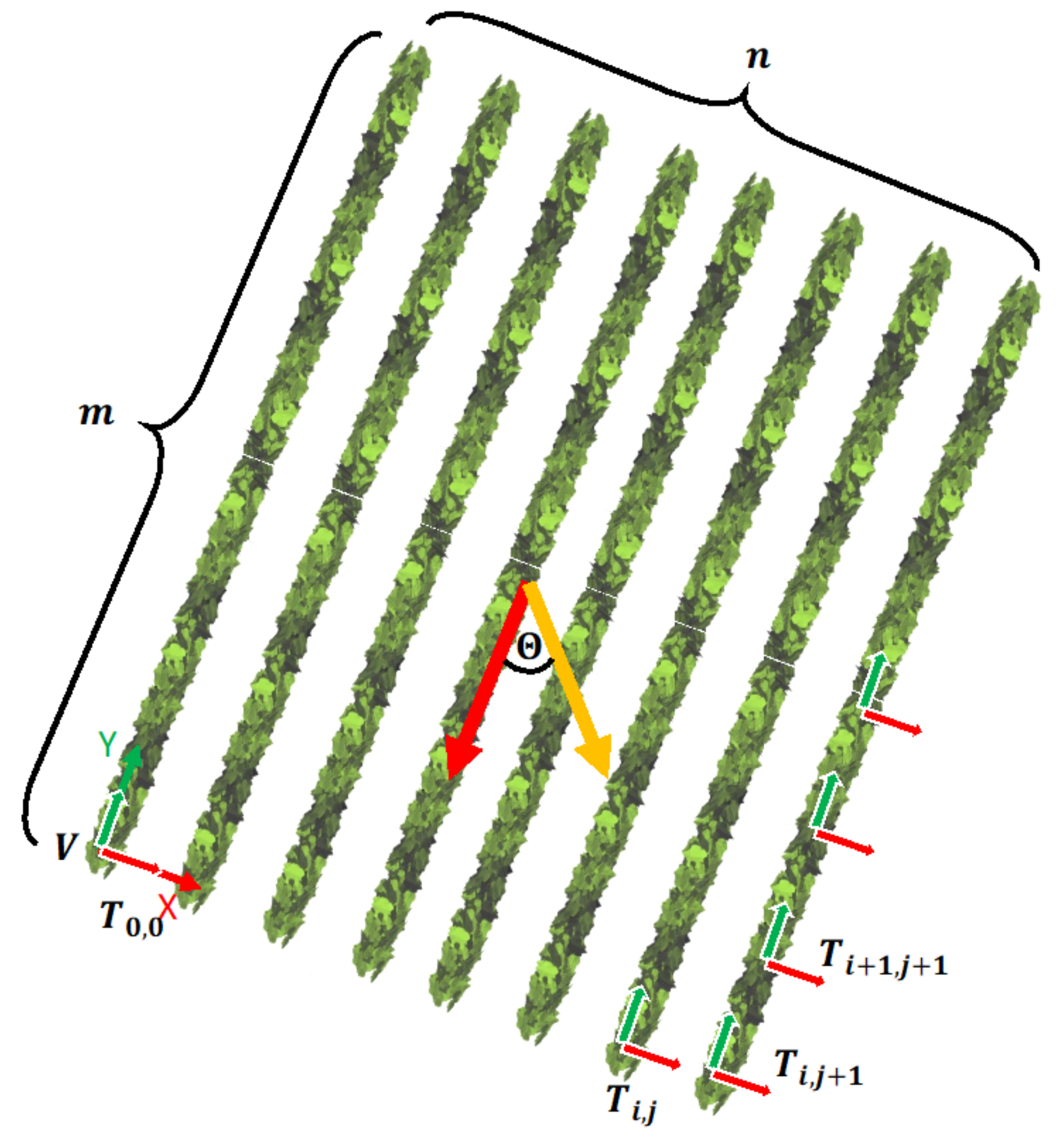
Formal Description of Vineyard
4. Estimation of Robot System Energy Consumption
4.1. Mission Energy Estimation
4.2. Spraying
4.3. Bud Rubbing
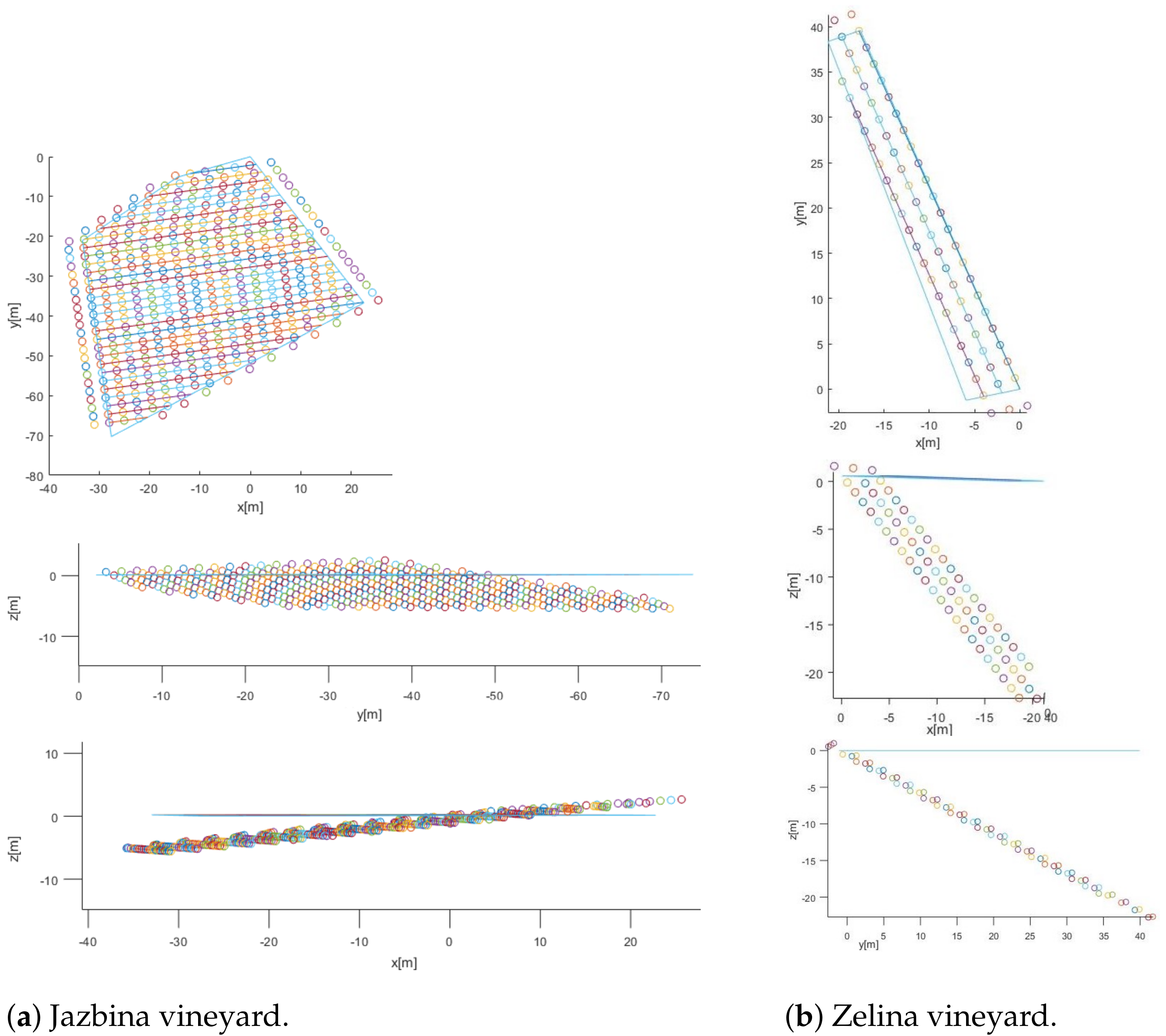
4.4. Energy Consumption Estimation for Operations in Jazbina Vineyard
- 1227.5 s, total travel time downhill;
- 1227.5 s, total travel time uphill;
- 105 s, total time for changing to the next row.
4.5. Energy Consumption Estimation for Operations in Zelina Vineyard
- 125 s, total travel time downhill;
- 125 s, total travel time uphill;
- 7.5 s, total time for changing to the next row.
4.6. Comments on the Accuracy of the Proposed Estimation Method
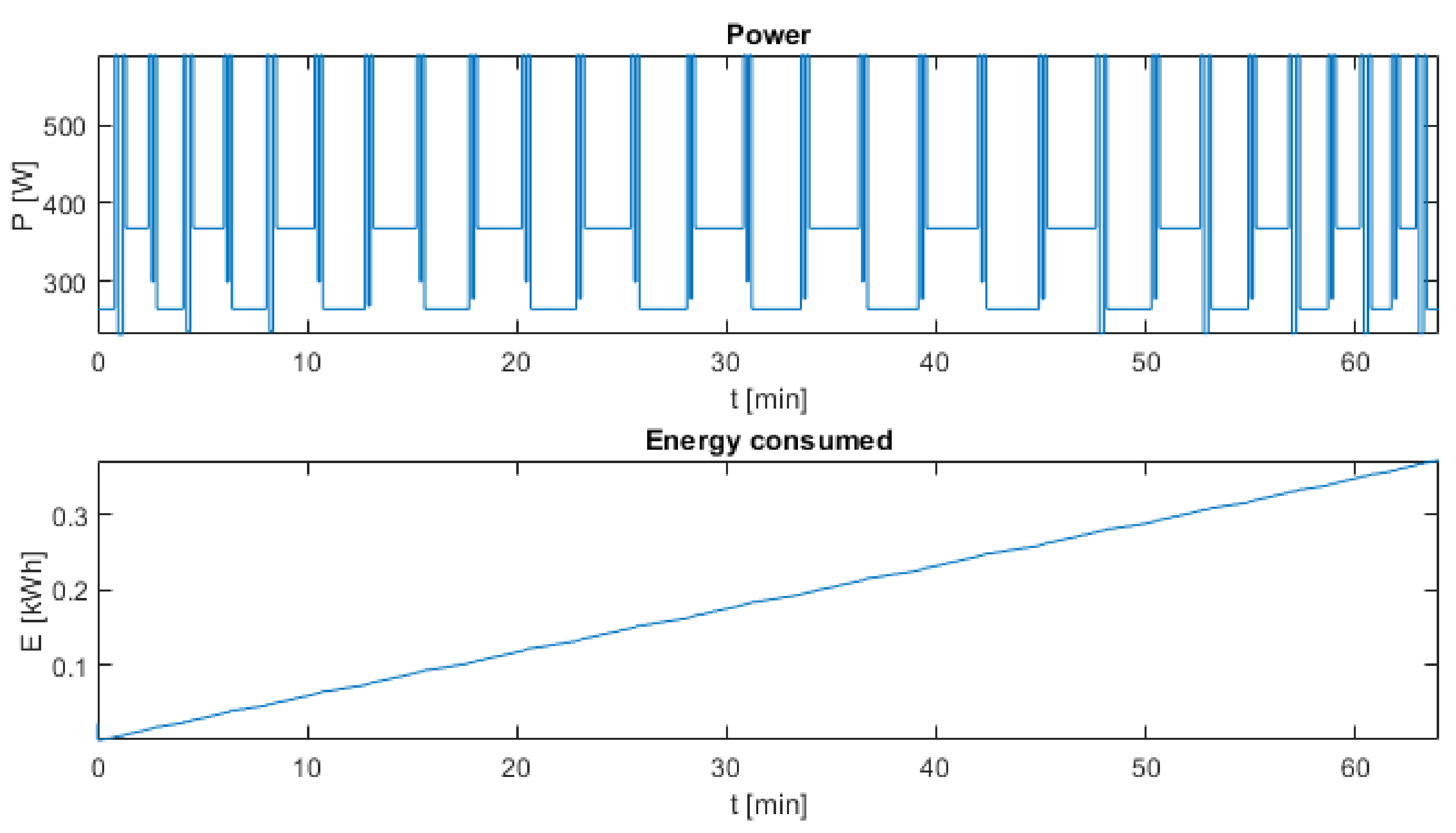
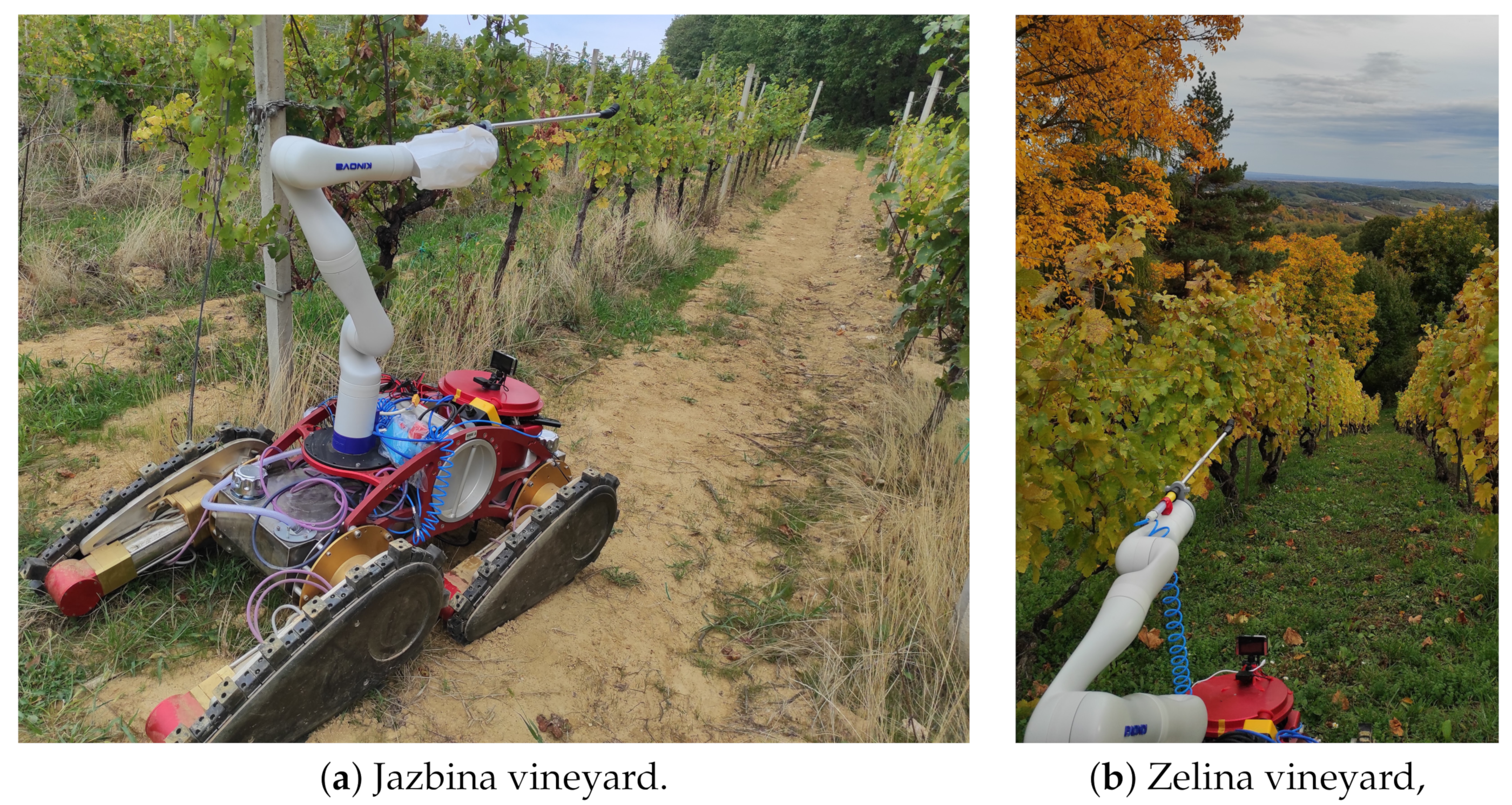
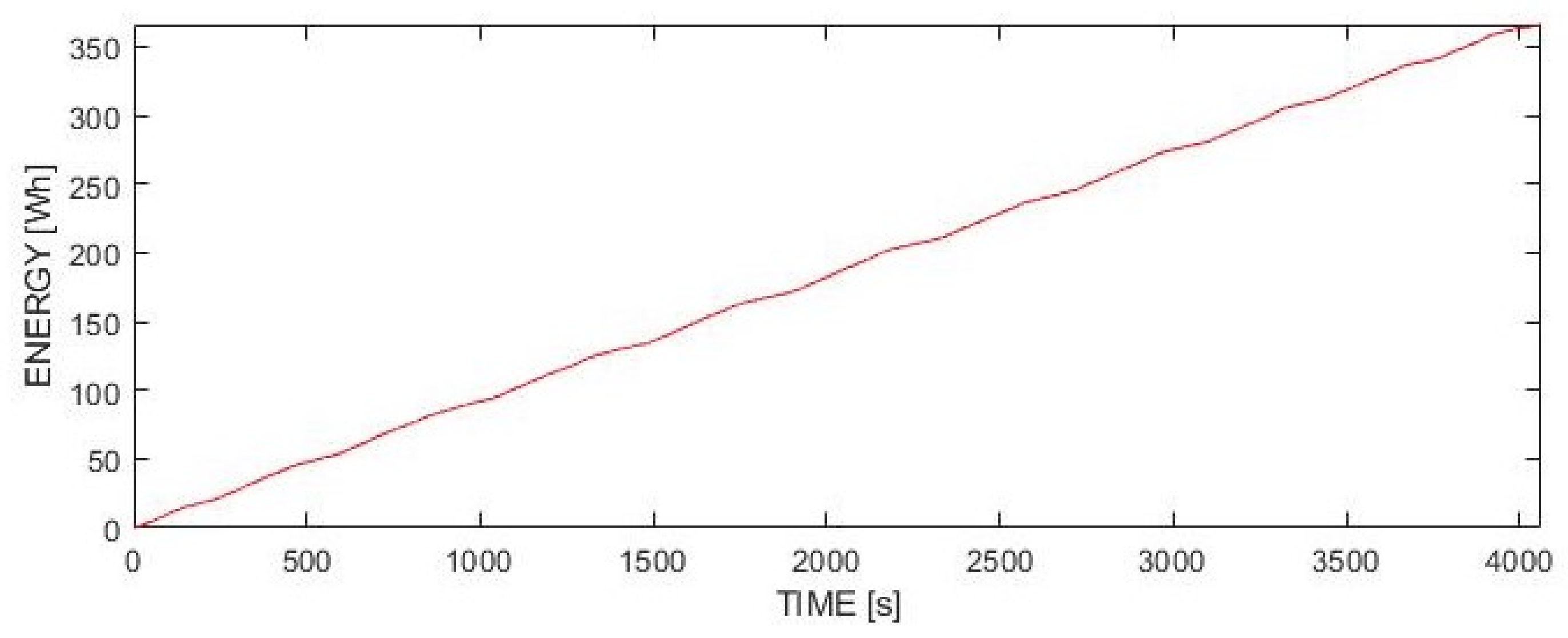
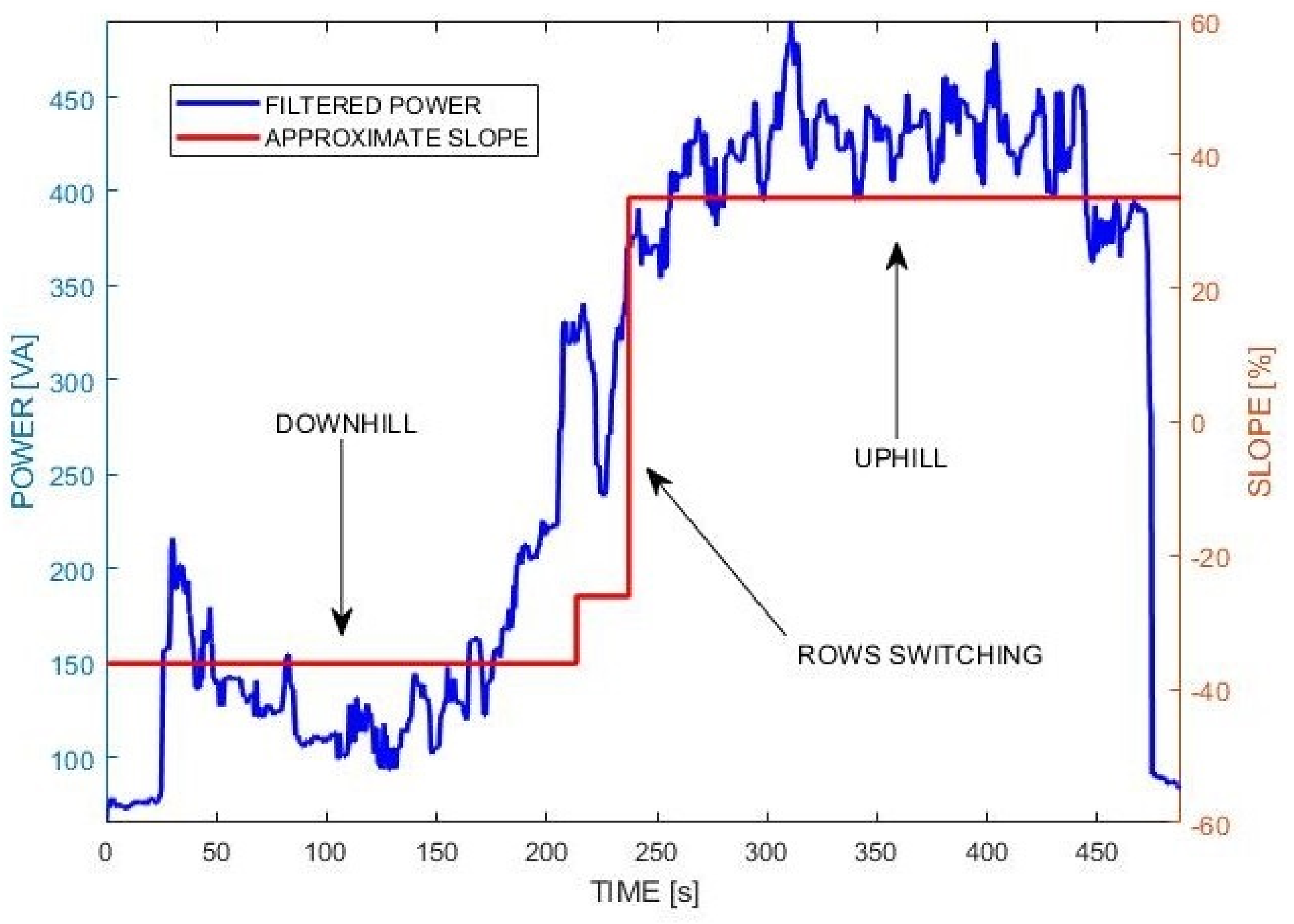
5. Experimental Validation
5.1. Jazbina Experiments
- h, measured altitude;
- , first measured altitude, initial value;
- = 9.80665 , gravitational acceleration constant;
- T, standard temperature;
- k = , Boltzmann’s constant;
- m = , average mass of atoms;
- , static pressure (pressure at start point);
- P, measured static pressure.
5.2. Zelina Experiments
5.3. Future Work
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Gonzalez-de Santos, P.; Fernández, R.; Sepúlveda, D.; Navas, E.; Emmi, L.; Armada, M. Field Robots for Intelligent Farms—Inhering Features from Industry. Agronomy 2020, 10, 1638. [Google Scholar] [CrossRef]
- Duckett, T.; Pearson, S.; Blackmore, S.; Grieve, B.; Chen, W.H.; Cielniak, G.; Cleaversmith, J.; Dai, J.; Davis, S.; Fox, C.; et al. Agricultural Robotics: The Future of Robotic Agriculture. arXiv 2018, arXiv:1806.06762. [Google Scholar]
- Miller, I.J.; Schieber, B.; Bey, Z.D.; Benner, E.; Ortiz, J.D.; Girdner, J.; Patel, P.; Coradazzi, D.G.; Henriques, J.; Forsyth, J. Analyzing crop health in vineyards through a multispectral imaging and drone system. In Proceedings of the 2020 Systems and Information Engineering Design Symposium (SIEDS), Charlottesville, VA, USA, 24 April 2020; pp. 1–5. [Google Scholar] [CrossRef]
- Arnó, J.; Escolà, A.; Vallès, J.M.; Llorens, J.; Sanz, R.; Masip, J.; Palacín, J.; Rosell-Polo, J.R. Leaf area index estimation in vineyards using a ground-based LiDAR scanner. Precis. Agric. 2013, 14, 290–306. [Google Scholar] [CrossRef] [Green Version]
- Berenstein, R.; Shahar, O.B.; Shapiro, A.; Edan, Y. Grape clusters and foliage detection algorithms for autonomous selective vineyard sprayer. Intell. Serv. Robot. 2010, 3, 233–243. [Google Scholar] [CrossRef]
- Berenstein, R. The use of agricultural robots in crop spraying/fertilizer applications. In Robotics and Automation for Improving Agriculture; Burleigh Dodds Science Publishing: Cambridge, UK, 2019; pp. 109–136. [Google Scholar] [CrossRef]
- Oberti, R.; Marchi, M.; Tirelli, P.; Calcante, A.; Iriti, M.; Hočevar, M.; Baur, J.; Pfaff, J.; Schütz, C.; Ulbrich, H. Selective spraying of grapevine’s diseases by a modular agricultural robot. J. Agric. Eng. 2013, 44. [Google Scholar] [CrossRef]
- Oberti, R.; Marchi, M.; Tirelli, P.; Calcante, A.; Iriti, M.; Tona, E.; Hočevar, M.; Baur, J.; Pfaff, J.; Schütz, C.; et al. Selective spraying of grapevines for disease control using a modular agricultural robot. Biosyst. Eng. 2016, 146, 203–215. [Google Scholar] [CrossRef]
- De Soto, M.G.; Emmi, L.; Perez-Ruiz, M.; Aguera, J.; de Santos, P.G. Autonomous systems for precise spraying—Evaluation of a robotised patch sprayer. Biosyst. Eng. 2016, 146, 165–182. [Google Scholar] [CrossRef]
- Jackson, R.S. 5—Site Selection and Climate. In Wine Science, 3rd ed.; Jackson, R.S., Ed.; Food Science and Technology; Academic Press: Cambridge, MA, USA, 2014; pp. 239–269. [Google Scholar] [CrossRef]
- Hektor. Available online: https://hektor.fer.hr/ (accessed on 27 September 2021).
- Goričanec, J.; Kapetanović, N.; Vatavuk, I.; Hrabar, I.; Vasiljević, G.; Gledec, G.; Stuhne, D.; Bogdan, S.; Orsag, M.; Petrović, T.; et al. Heterogeneous autonomous robotic system in viticulture and mariculture—Project overview. In Proceedings of the 2021 16th International Conference on Telecommunications (ConTEL), Zagreb, Croatia, 30 June–2 July 2021; pp. 181–188. [Google Scholar] [CrossRef]
- Meyers, J.M.; Miles, J.A.; Tejeda, D.G.; Faucett, J.; Janowitz, I.; Weber, E.; Smith, R.; Garcia, L. Priority Risk Factors for Back Injury in Agricultural Field Work: Vineyard Ergonomics. J. Agromed. 2002, 8, 39–54. [Google Scholar] [CrossRef]
- McCauley, L.A.; Anger, W.K.; Keifer, M.; Langley, R.; Robson, M.G.; Rohlman, D. Studying Health Outcomes in Farmworker Populations Exposed to Pesticides. Environ. Health Perspect. 2006, 114, 953–960. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sadrpour, A.; Jin, J.; Ulsoy, A.G. Mission energy prediction for unmanned ground vehicles. In Proceedings of the IEEE International Conference on Robotics and Automation, Saint Paul, MN, USA, 14–18 May 2012; pp. 2229–2234. [Google Scholar] [CrossRef]
- Sadrpour, A.; Jin, J.; Ulsoy, A.G. Experimental validation of mission energy prediction model for unmanned ground vehicles. In Proceedings of the American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 5960–5965. [Google Scholar] [CrossRef]
- Hou, L.; Zhang, L.; Kim, J. Energy modeling and power measurement for mobile robots. Energies 2019, 12, 27. [Google Scholar] [CrossRef] [Green Version]
- Hou, L.; Zhou, F.; Kim, K.; Zhang, L. Practical model for energy consumption analysis of omnidirectional mobile robot. Sensors 2021, 21, 1800. [Google Scholar] [CrossRef] [PubMed]
- Chuy, O.; Collins, E.G.; Yu, W.; Ordonez, C. Power modeling of a skid steered wheeled robotic ground vehicle. In Proceedings of the IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 4118–4123. [Google Scholar] [CrossRef]
- Morales, J.; Martínez, J.L.; Mandow, A.; García-Cerezo, A.J.; Pedraza, S. Power consumption modeling of skid-steer tracked mobile robots on rigid terrain. IEEE Trans. Robot. 2009, 25, 1098–1108. [Google Scholar] [CrossRef]
- multimaster_fkie—ROS Wiki. Available online: https://wiki.ros.org/multimaster_fkie (accessed on 8 December 2021).
- El-Ashmawy, K.L. Investigation of the Accuracy of Google Earth Elevation Data. Artif. Satell. 2016, 51, 89–97. [Google Scholar] [CrossRef] [Green Version]
- Mocera, F.; Somà, A.; Nicolini, A. Grousers Effect in Tracked Vehicle Multibody Dynamics with Deformable Terrain Contact Model. Appl. Sci. 2020, 10, 6581. [Google Scholar] [CrossRef]
- Bolanakis, D.E.; Kotsis, K.T.; Laopoulos, T. Temperature influence on differential barometric altitude measurements. In Proceedings of the 2015 IEEE 8th International Conference on Intelligent Data Acquisition and Advanced Computing Systems: Technology and Applications (IDAACS), Warsaw, Poland, 24–26 September 2015; Volume 1, pp. 120–124. [Google Scholar] [CrossRef]
- Zhang, F.; Leonard, N.E. Cooperative Filters and Control for Cooperative Exploration. IEEE Trans. Autom. Control 2010, 55, 650–663. [Google Scholar] [CrossRef] [Green Version]
- Luo, S.; Kim, J.; Parasuraman, R.; Bae, J.H.; Matson, E.T.; Min, B.C. Multi-robot rendezvous based on bearing-aided hierarchical tracking of network topology. Ad Hoc Netw. 2019, 86, 131–143. [Google Scholar] [CrossRef]
- Luo, S.; Kim, J.; Min, B.C. Asymptotic Boundary Shrink Control with Multirobot Systems. IEEE Trans. Syst. Man Cybern. Syst. 2022, 52, 591–605. [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| HEKTOR System Requirements for Viticulture Scenarios | |
|---|---|
| Terrain characteristics | ATMM should function on slopes from 0 to 60%, on rocky, earthy or grass terrain. |
| Vineyard size | The estimated vineyard size for application of the HEKTOR system without human intervention is 1 ha, with an average planting height of 1.5 m and row spacing of 1.2–2 m. |
| Permissible flying height | Aerial survey of vineyards should be carried out at a height of at least 10 m above the height of the plantation. When mapping vineyards, the maximum height depends on the area of the vineyard (≤30 m). |
| Reliable communication | The operator’s system should communicate reliably with the HEKTOR system at a distance of 150 m. |
| ATMM Localization | ATMM should know its position in space with an accuracy of 10 cm. |
| Spraying efficiency | ATMM should treat plantations with a speed of at least 0.7 m/s at a slope of up to 30%. |
| Bud rubbing efficiency | The system shall achieve a bud rubbing rate of at least 20 vines per hour. |
| Battery capacity | The battery source should have at least the capacity of 48 V × 26 Ah. |
| Peak power | The power source should provide a peak power of 2000 W. |
| Input Value | Nominal Values | Description |
|---|---|---|
| (m/s) | 0.4 | defined driving speed of the mobile base |
| (m/s) | 1 | defined acceleration of the mobile base |
| (W) | 120 | constant power consumed in idle state |
| (W) | 160 | power used when mobile base moved with |
| (W) | 470 | average power when turning the mobile base in place |
| (W) | 36 | average power used by the robot arm |
| m (kg) | 100 | weight of the robot system |
| (s) | 30 | average time needed for bud rubbing |
| (s) | 9 | average time needed to turn in place by 90 degrees |
| (m) | (m) | (deg) | (deg) |
|---|---|---|---|
| 3 | 2.1 | 0 | 10.0 |
| Component | E (kWh) Driving | E (kWh) Spraying | E (kWh) Bud Rubbing |
|---|---|---|---|
| 0.1021 | 0.1280 | 0.4963 | |
| 0.1796 | 0.2264 | 0.1711 | |
| 0.0306 | 0.0312 | 1.8130 | |
| Total | 0.3123 | 0.3856 | 2.4804 |
| (m) | (m) | (deg) | (deg) |
|---|---|---|---|
| 1 | 3 | 5 | 21.1 |
| Jazbina | Zelina | |
|---|---|---|
| Consumed energy | 385 Wh | 38.5 Wh |
| Battery usage | 30.1% | 3.1% |
| Average power | 341 W | 284 W |
| Parameter | Jazbina | Zelina | ||
|---|---|---|---|---|
| Estimated | Measured | Estimated | Measured | |
| Slope | 17.6% (10.0 degrees) | 8.4% (4.8 degrees) | 38.6% (21.1 degrees) | 52.3% (27.6 degrees) |
| Average total power | 366.9 W | 341.1 W | 335.8 W | 284.3 W |
| Total duration | 51.1 min | 67.8 min | 4.6 min | 8.1 min |
| Total consumed energy | 312.3 Wh | 385.4 Wh | 25.7 Wh | 38.5 Wh |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hrabar, I.; Vasiljević, G.; Kovačić, Z. Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics 2022, 11, 217. https://doi.org/10.3390/electronics11020217
Hrabar I, Vasiljević G, Kovačić Z. Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics. 2022; 11(2):217. https://doi.org/10.3390/electronics11020217
Chicago/Turabian StyleHrabar, Ivan, Goran Vasiljević, and Zdenko Kovačić. 2022. "Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards" Electronics 11, no. 2: 217. https://doi.org/10.3390/electronics11020217
APA StyleHrabar, I., Vasiljević, G., & Kovačić, Z. (2022). Estimation of the Energy Consumption of an All-Terrain Mobile Manipulator for Operations in Steep Vineyards. Electronics, 11(2), 217. https://doi.org/10.3390/electronics11020217