


Evaluating the Efficiency of Connected and Automated Buses Platooning in Mixed Traffic Environment

Abstract
1. Introduction
2. Problem Formulation
3. System Modeling
3.1. Vehicle Longitudinal Dynamics
3.2. Battery Dynamics
4. Nonlinear Programming Problem
5. Car-Following Model and Velocity Estimation
5.1. Intelligent Driving Model
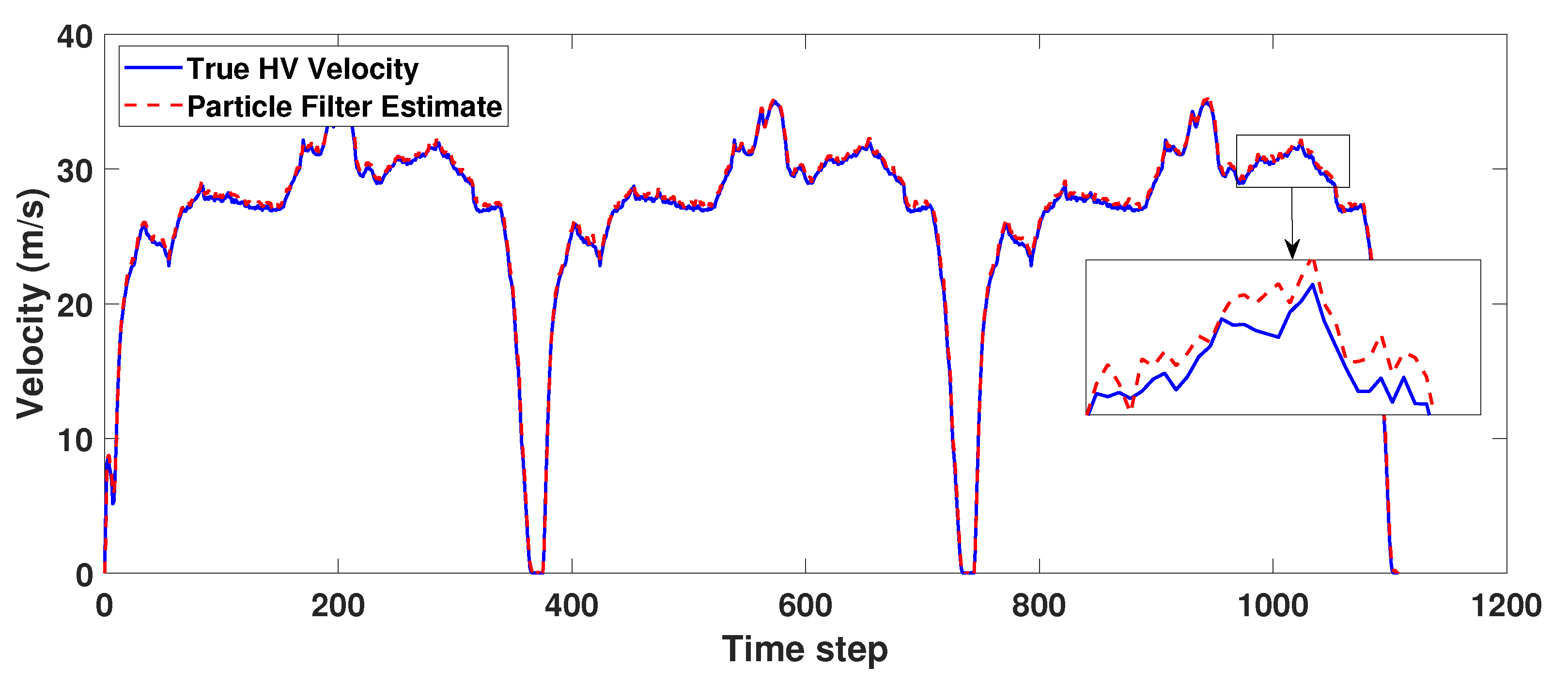
5.2. Particle Filter-Based Velocity Estimation
6. Simulation and Results
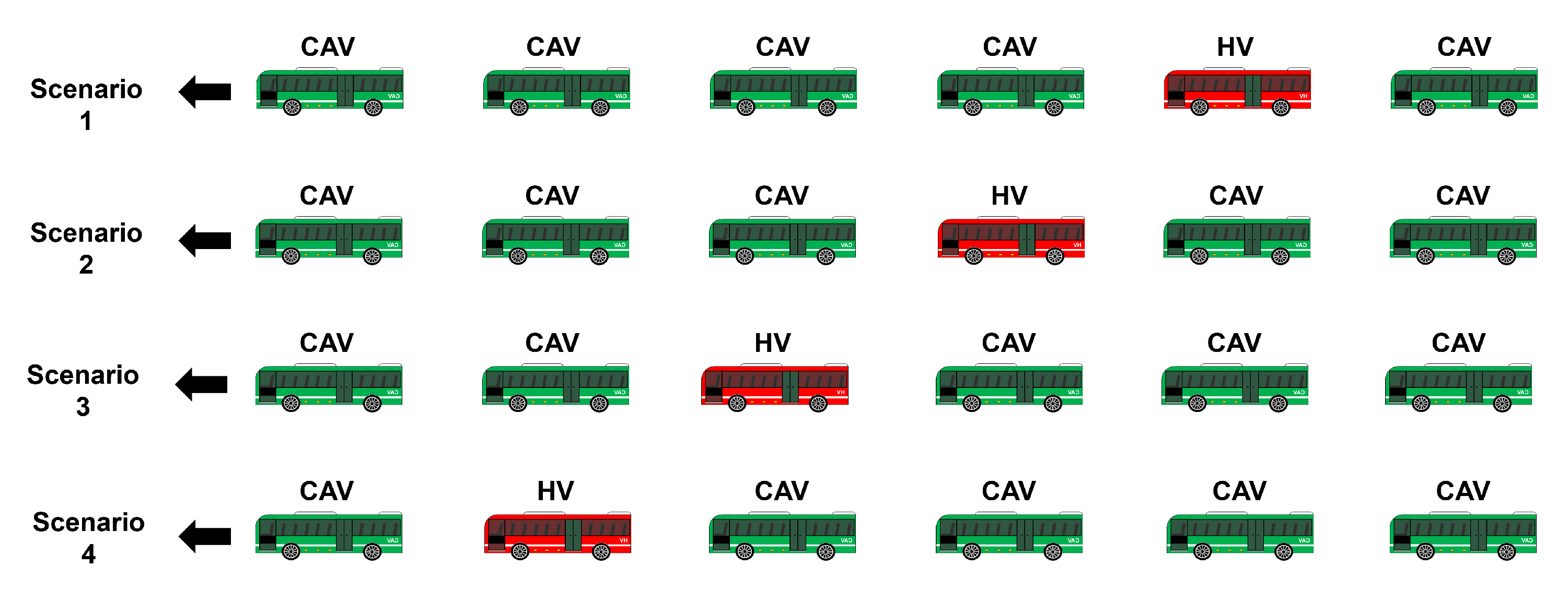
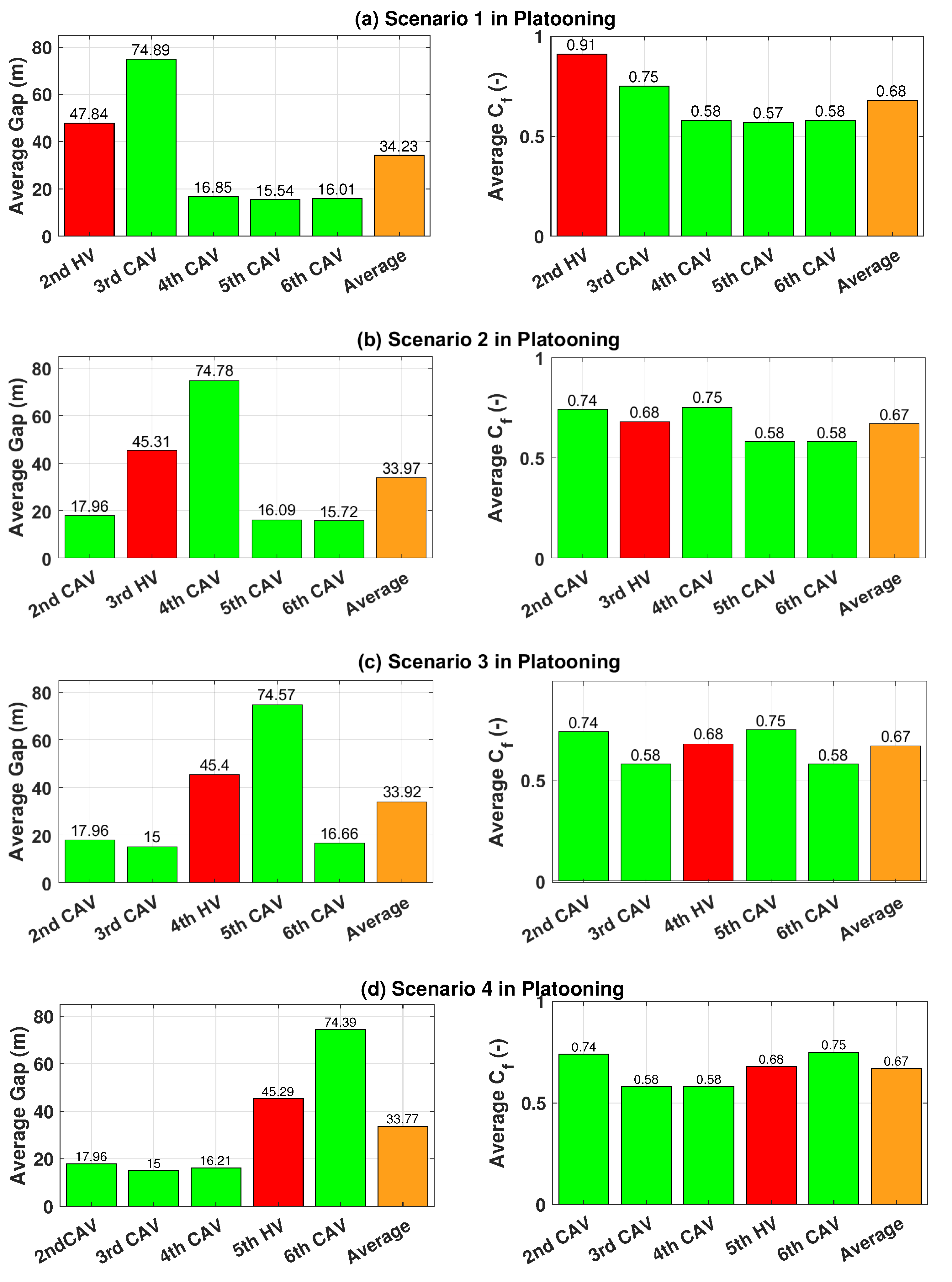
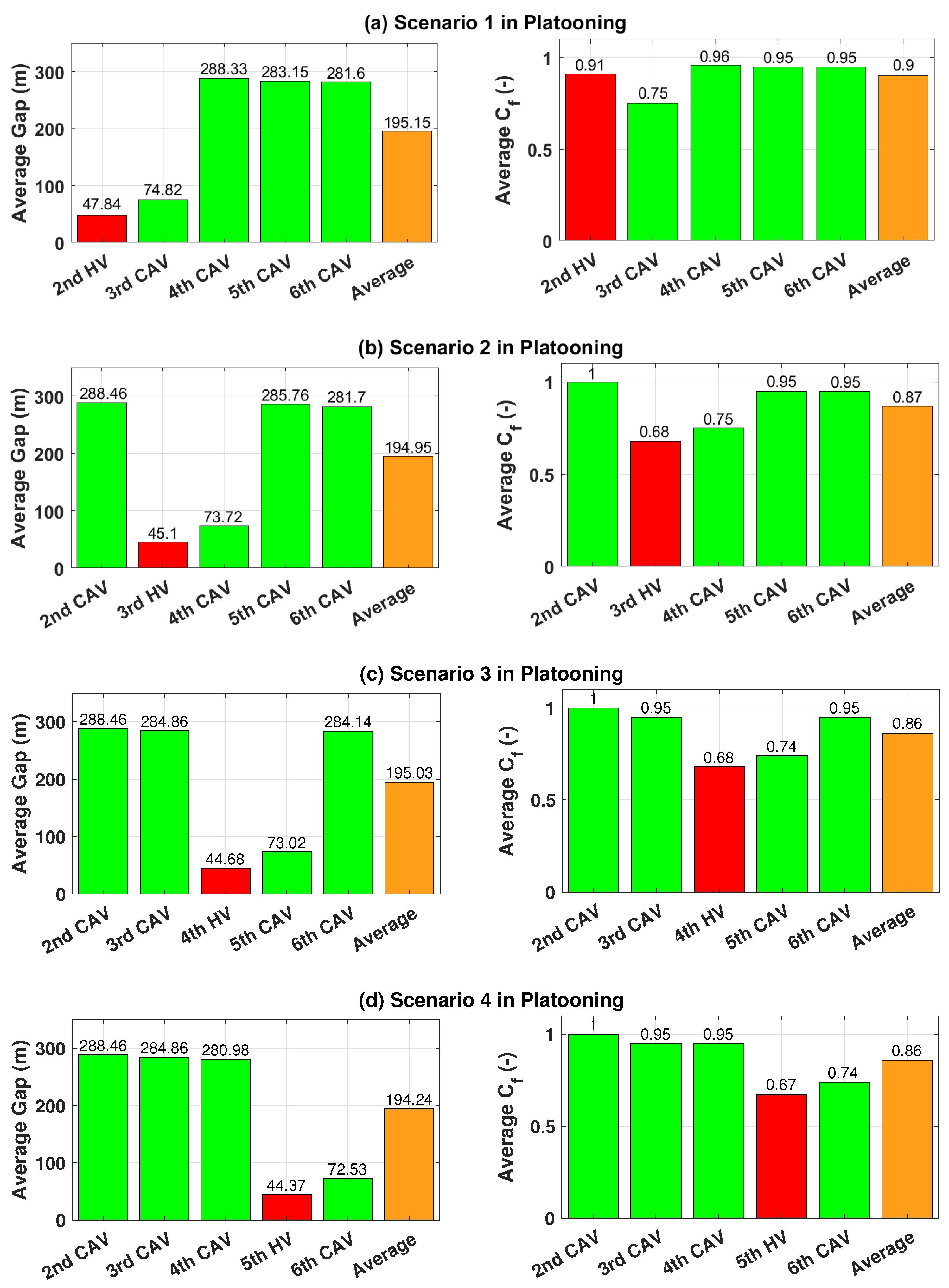
6.1. Case 1: Energy Efficiencies Depending on the Locations of HV on the Flat Road
6.2. Case 2: Energy Efficiencies Depending on the Locations of HV on the Sloped Road
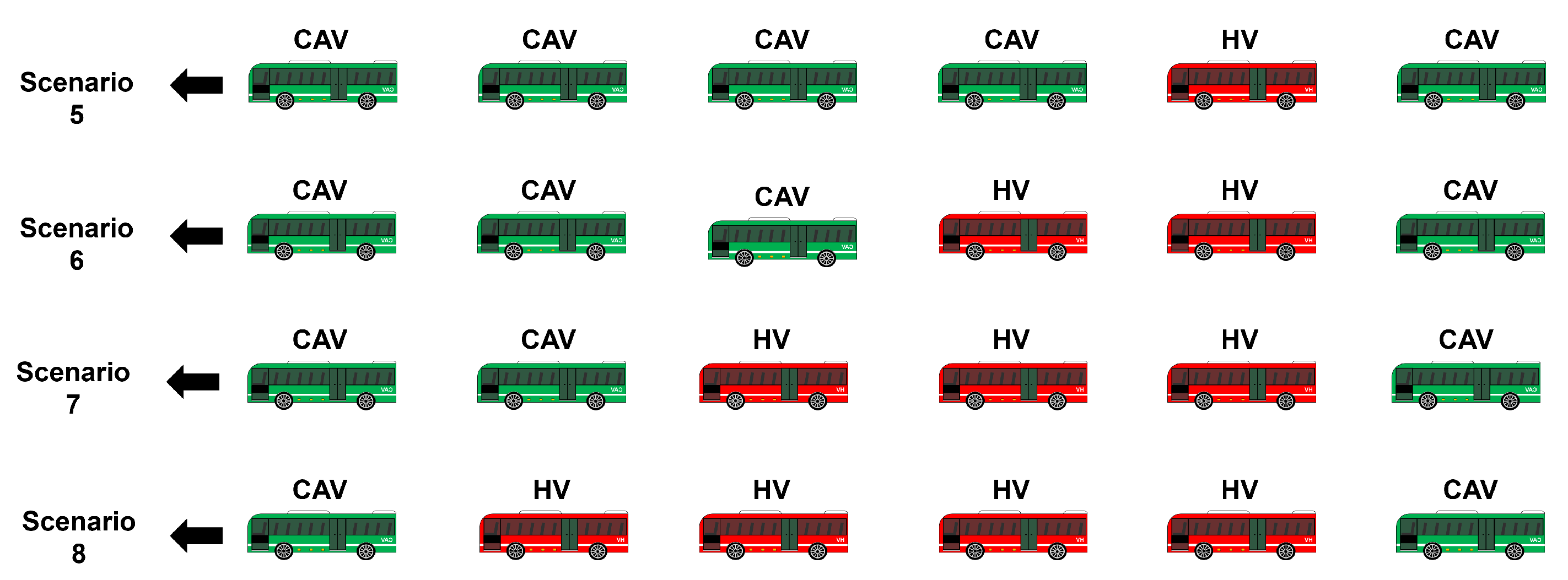
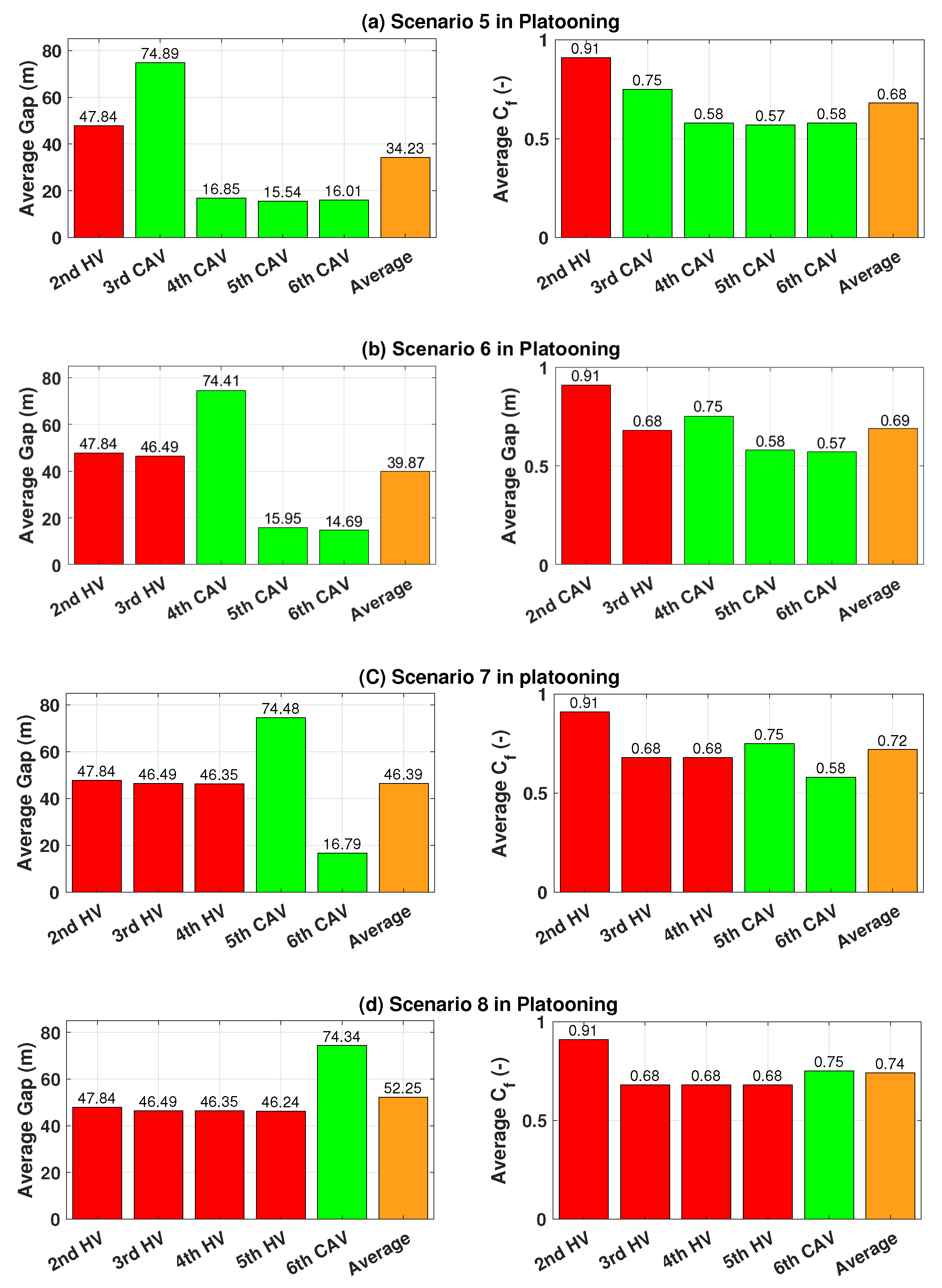
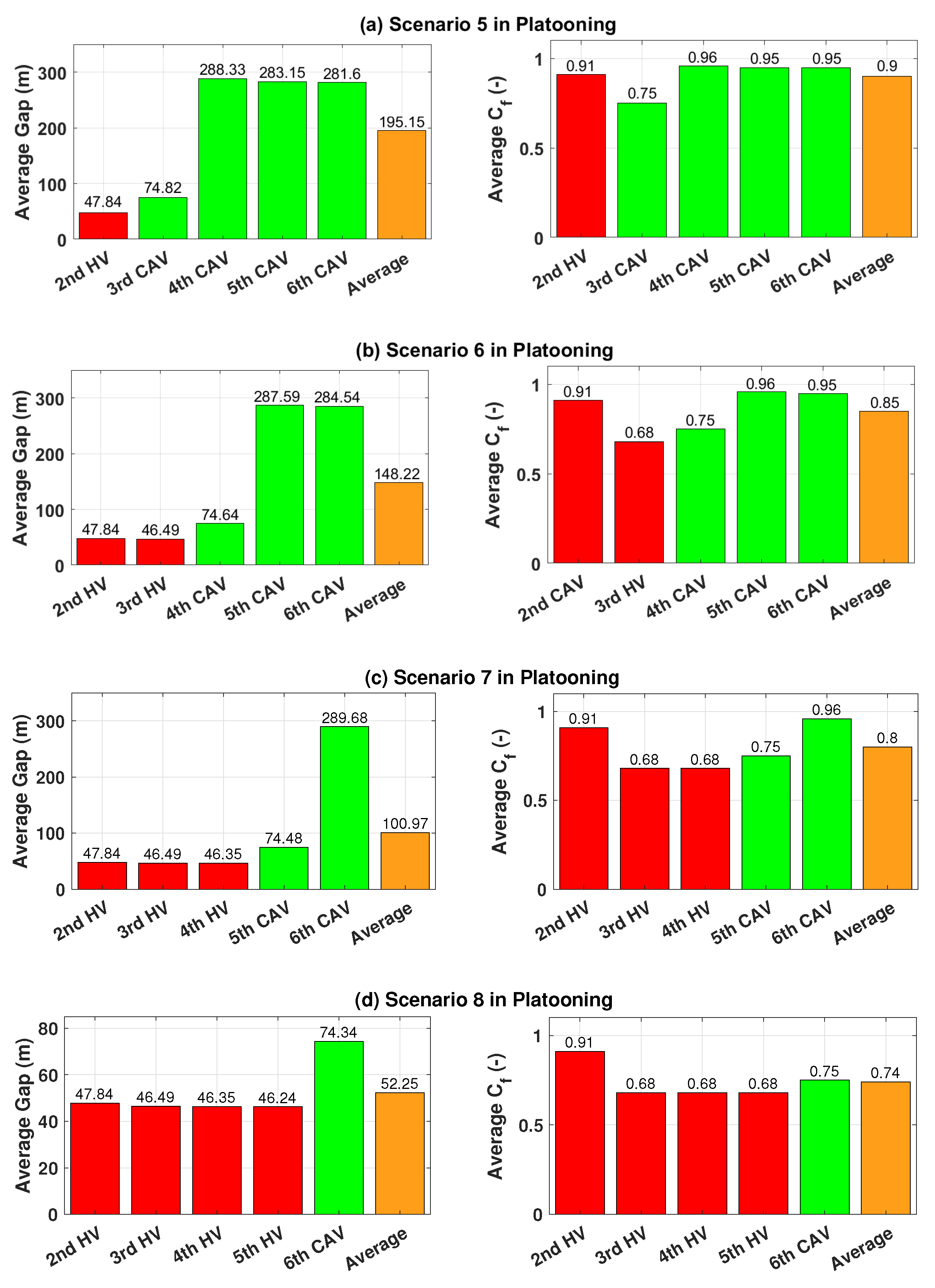
6.3. Case 3: Energy Efficiencies Depending on the Number of Multiple HVs on a Flat Road
6.4. Case 4: Energy Efficiencies Depending on the Number of Multiple HVs on the Sloped Road
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A


Appendix B

References
- Tran, M.-K.; Bhatti, A.; Vrolyk, R.; Wong, D.; Panchal, S.; Fowler, M.; Fraser, R. A review of range extenders in battery electric vehicles: Current Progress and Future Perspectives. World Electr. Veh. J. 2021, 12, 54. [Google Scholar] [CrossRef]
- Lain, M.J.; Kendrick, E. Understanding the limitations of lithium ion batteries at high rates. J. Power Sources 2021, 493, 229690. [Google Scholar] [CrossRef]
- Mahler, G.; Vahidi, A. An optimal velocity-planning scheme for vehicle energy efficiency through probabilistic prediction of traffic-signal timing. IEEE Trans. Intell. Transp. Syst. 2014, 15, 2516–2523. [Google Scholar] [CrossRef]
- Han, J.; Shen, D.; Karbowski, D.; Rousseau, A. Leveraging multiple connected traffic light signals in an energy-efficient speed planner. IEEE Control. Syst. Lett. 2021, 5, 2078–2083. [Google Scholar] [CrossRef]
- Wu, J.; Wang, X.; Li, L.; Qin, C.; Du, Y. Hierarchical control strategy with battery aging consideration for hybrid electric vehicle regenerative braking control. Energy 2018, 145, 301–312. [Google Scholar] [CrossRef]
- Chen, Y.; Kwak, K.H.; Kim, J.; Kim, Y.; Jung, D. Energy-efficient cabin climate control of electric vehicles using linear time-varying model predictive control. In Optimal Control Applications and Methods; Wiley: Hoboken, NJ, USA, 2021. [Google Scholar]
- Shuofeng, Z.; Amini, M.R.; Sun, J.; Mi, C. A two-layer real-time optimization control strategy for Integrated Battery Thermal Management and HVAC system in connected and automated hevs. IEEE Trans. Veh. Technol. 2021, 70, 6567–6576. [Google Scholar] [CrossRef]
- Wang, C.; Dai, Y.; Xia, J. A CAV platoon control method for isolated intersections: Guaranteed feasible multi-objective approach with priority. Energies 2020, 13, 625. [Google Scholar] [CrossRef]
- Pearre, N.S.; Ribberink, H. Review of research on V2X technologies, strategies, and operations. Renew. Sustain. Energy Rev. 2019, 105, 61–70. [Google Scholar] [CrossRef]
- Storck, C.R.; Duarte-Figueiredo, F. A 5G V2X ecosystem providing internet of vehicles. Sensors 2019, 19, 550. [Google Scholar] [CrossRef] [PubMed]
- Huch, S.; Ongel, A.; Betz, J.; Lienkamp, M. Multi-task end-to-end self-driving architecture for CAV platoons. Sensors 2021, 21, 1039. [Google Scholar] [CrossRef]
- Ghiasi, A.; Li, X.; Ma, J. A mixed traffic speed harmonization model with connected autonomous vehicles. Transp. Res. Part C Emerg. Technol. 2019, 104, 210–233. [Google Scholar] [CrossRef]
- Wang, X.; Park, S.; Han, K. Energy-Efficient Speed Planner for Connected and Automated Electric Vehicles on Sloped Roads. IEEE Access 2022, 10, 34654–34664. [Google Scholar] [CrossRef]
- Sankar, G.S.; Kim, M.; Han, K. Data-driven Leading Vehicle Speed Forecast and its Application to Ecological Predictive Cruise Control. IEEE Trans. Veh. Technol. 2022. [Google Scholar] [CrossRef]
- Kim, W.; Noh, J.; Lee, J. Effects of vehicle type and inter-vehicle distance on aerodynamic characteristics during vehicle platooning. Appl. Sci. 2021, 11, 4096. [Google Scholar] [CrossRef]
- Jacob, B.; de Chalendar, O.A. Truck platooning: Expected benefits and implementation conditions on highways. In Heavy Vehicle Transportant Technology (HVTT) International Symposium; 2018; Available online: https://hvttforum.org/wp-content/uploads/2019/11/Jacob-TRUCK-PLATOONING-EXPECTED-BENEFITS-AND-IMPLEMENTATION-CONDITIONS-ON-HIGHWAYS.pdf (accessed on 15 September 2022).
- Jo, Y.; Kim, J.; Oh, C.; Kim, I.; Lee, G. Benefits of travel time savings by truck platooning in Korean freeway networks. Transp. Policy 2019, 83, 37–45. [Google Scholar] [CrossRef]
- Sethuraman, G.; Liu, X.; Bachmann, F.R.; Xie, M.; Ongel, A.; Busch, F. Effects of bus platooning in an urban environment. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 974–980. [Google Scholar]
- Lakshmanan, V.K.; Sciarretta, A.; Mourlan, O.E.G. Cooperative Levels in Eco-Driving of Electric Vehicle Platoons. In Proceedings of the 2021 IEEE International Intelligent Transportation Systems Conference (ITSC), Indianapolis, IN, USA, 19–22 September 2021; pp. 1163–1170. [Google Scholar]
- Hu, M.; Bauer, P. Energy Analysis of Highway Electric HDV Platooning Considering Adaptive Downhill Coasting Speed. World Electr. Veh. J. 2021, 12, 180. [Google Scholar] [CrossRef]
- Prathiba, S.B.; Raja, G.; Dev, K.; Kumar, N.; Guizani, M. A hybrid deep reinforcement learning for autonomous vehicles smart-platooning. IEEE Trans. Veh. Technol. 2021, 70, 13340–13350. [Google Scholar] [CrossRef]
- Polverino, P.; Arsie, I.; Pianese, C. Optimal energy management for hybrid electric vehicles based on dynamic programming and receding horizon. Energies 2021, 14, 3502. [Google Scholar] [CrossRef]
- Gharib, A.; Stenger, D.; Ritschel, R.; Voßwinkel, R. Multi-objective optimization of a path-following MPC for vehicle guidance: A Bayesian optimization approach. In Proceedings of the 2021 European Control Conference (ECC), Delft, The Netherlands, 29 June 2021–July 2021; pp. 2197–2204. [Google Scholar]
- Han, K.; Park, G.; Sankar, G.S.; Nam, K.; Choi, S.B. Model predictive control framework for improving vehicle cornering performance using handling characteristics. IEEE Trans. Intell. Transp. Syst. 2020, 22, 3014–3024. [Google Scholar] [CrossRef]
- Serale, G.; Fiorentini, M.; Capozzoli, A.; Bernardini, D.; Bemporad, A. Model predictive control (MPC) for enhancing building and HVAC system energy efficiency: Problem formulation, applications and opportunities. Energies 2018, 11, 631. [Google Scholar] [CrossRef]
- Amini, M.R.; Kolmanovsky, I.; Sun, J. Hierarchical MPC for robust eco-cooling of connected and automated vehicles and its application to electric vehicle battery thermal management. IEEE Trans. Control Syst. Technol. 2020, 29, 316–328. [Google Scholar] [CrossRef]
- Lee, D.; Rousseau, A.; Rask, E. Development and Validation of the Ford Focus Battery Electric Vehicle Model (No. 2014-01-1809); SAE Technical Paper; SAE International: Warrendale, PA, USA, 2014. [Google Scholar]
- Long, H.; Khalatbarisoltani, A.; Hu, X. MPC-based Eco-Platooning for Homogeneous Connected Trucks Under Different Communication Topologies. In Proceedings of the 2022 IEEE Intelligent Vehicles Symposium (IV), Aachen, Germany, 4–9 June 2022; pp. 241–246. [Google Scholar]
- Wang, F.; Zhuang, W.; Yin, G.; Liu, S.; Liu, Y.; Dong, H. Robust inter-vehicle distance measurement using cooperative vehicle localization. Sensors 2021, 21, 2048. [Google Scholar] [CrossRef] [PubMed]
- Zabat, M.; Stabile, N.; Farascaroli, S.; Brow, F. The Aerodynamic Performance of Platoons: A Final Report; Escholarship: Los Angeles, CA, USA, 1995. [Google Scholar]
- Guttenberg, M.; Sripad, S.; Viswanathan, V. Evaluating the potential of platooning in lowering the required performance metrics of li-ion batteries to enable practical electric semi-trucks. ACS Energy Lett. 2017, 2, 2642–2646. [Google Scholar] [CrossRef]
- Hussein, A.A.; Rakha, H.A. Vehicle platooning impact on drag coefficients and energy/fuel saving implications. IEEE Trans. Veh. Technol. 2021, 71, 1199–1208. [Google Scholar] [CrossRef]
- Hucho, W.H. (Ed.) Aerodynamics of Road Vehicles: From Fluid Mechanics to Vehicle Engineering; Elsevier: Amsterdam, The Netherlands, 2013. [Google Scholar]
- Rousseau, A.; Pagerit, S.; DeLaughter, P.; Juskiewicz, M.; Sharer, P.; Vijayagopal, R. AMBER: A New Architecture for Flexible MBSE Workflows. In Proceedings of the 2017 IEEE Vehicle Power and Propulsion Conference (VPPC), Belfort, France, 11–14 December 2017; pp. 1–6. [Google Scholar]
- Xu, Y.; Xu, K.; Wan, J.; Xiong, Z.; Li, Y. Research on particle filter tracking method based on Kalman filter. In Proceedings of the 2018 2nd IEEE Advanced Information Management, Communicates, Electronic and Automation Control Conference (IMCEC), Xi’an, China, 25–27 May 2018; pp. 1564–1568. [Google Scholar]
- Bhattacharyya, R.P. Modeling Human Driving from Demonstrations; Stanford University: Stanford, CA, USA, 2021. [Google Scholar]
- Meiring, G.A.M.; Myburgh, H.C. A review of intelligent driving style analysis systems and related artificial intelligence algorithms. Sensors 2015, 15, 30653–30682. [Google Scholar] [CrossRef]
- Simon, D. Optimal State Estimation: Kalman, Hinfinity, and Nonlinear Approaches; John Wiley Sons: Hoboken, NJ, USA, 2006. [Google Scholar]
- Lisle, R.J. Google Earth: A new geological resource. Geol. Today 2006, 22, 29–32. [Google Scholar] [CrossRef]













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Bus Platoon | ||||
|---|---|---|---|---|---|
| Two Buses | Three Buses | ||||
| Lead | Trail | Lead | Middle | Trail | |
| 4.7945 | 9.3348 | ||||
| 1.3115 | 4.4369 | 1.3115 | 5.1656 | ||
| 1.5396 | 6.1509 | 1.5369 | 3.5213 | −3.9662 | |
| 3.4243 | 1.117410 | 3.4243 | 1.0311 | 6.7697 | |
| 4.6933 | 8.1124 | ||||
| 1.1463 | 4.6002 | 1.1463 | 1.0062 | ||
| 1.7730 | 1.7730 | 2.9853 | −4.2684 | ||
| 4.0877 | 1.963910 | 4.0877 | 1.9158 | 1.4692 | |
| - | 3.0815 | - | 2.4082 | 4.0045 | |
| Description | Symbol | Value |
|---|---|---|
| Mass of the vehicle | m | 19,717 [kg] |
| Wheel radius | r | 0.4655 [m] |
| Ratio for single reduction gear | 11.76 [-] | |
| Frontal area | 7.33 [m] | |
| Coefficient of rolling resistance | f | 0.00863 [-] |
| Drag coefficient | 0.65 [-] | |
| Battery voltage | V | [3.5 4.2] [V] |
| Battery efficiency | 0.9 [-] | |
| Maximum capacity of battery | 33.1 [Ah] | |
| SOC range | [0 1] [-] | |
| Gravity | g | 9.81 [m/s] |
| Air density | 1.1985 [kg/m] |
| Scenario | 1st Bus SOC (%) | 2st Bus SOC (%) | 3st Bus SOC (%) | 4st Bus SOC (%) | 5st Bus SOC (%) | 6st Bus SOC (%) | Average SOC Consumption (%) |
|---|---|---|---|---|---|---|---|
| Scenario 1 | 22.97 | 22.07 | 20.98 | 18.21 | 17.97 | 17.99 | 20.03 |
| Scenario 2 | 22.97 | 19.92 | 20.13 | 20.6 | 18.02 | 17.96 | 19.80 |
| Scenario 3 | 22.97 | 19.32 | 18.15 | 20.15 | 20.68 | 17.99 | 19.84 |
| Scenario 4 | 22.97 | 19.12 | 18.15 | 18.08 | 20.01 | 20.47 | 19.98 |
| Scenario | 1st Bus SOC (%) | 2st Bus SOC (%) | 3st Bus SOC (%) | 1st Bus SOC (%) | 5st Bus SOC (%) | 6st Bus SOC (%) | Average SOC Consumption (%) |
|---|---|---|---|---|---|---|---|
| Scenario 1 | 23.33 | 22.55 | 20.98 | 19.96 | 19.79 | 19.99 | 21.17 |
| Scenario 2 | 23.33 | 20.21 | 20.81 | 21.20 | 19.78 | 20.01 | 20.99 |
| Scenario 3 | 23.33 | 20.21 | 19.80 | 20.65 | 21.03 | 19.93 | 20.93 |
| Scenario 4 | 23.33 | 20.21 | 19.80 | 19.78 | 20.71 | 21.16 | 20.94 |
| Scenario | 1st Bus SOC (%) | 2st Bus SOC (%) | 3st Bus SOC (%) | 4st Bus SOC (%) | 5st Bus SOC (%) | 6st Bus SOC (%) | Average SOC Consumption (%) |
|---|---|---|---|---|---|---|---|
| Scenario 5 | 22.97 | 22.07 | 20.98 | 18.21 | 17.97 | 17.99 | 20.03 |
| Scenario 6 | 22.97 | 22.07 | 20.47 | 22.06 | 17.99 | 17.90 | 20.58 |
| Scenario 7 | 22.97 | 22.07 | 20.47 | 20.46 | 20.97 | 18.15 | 20.85 |
| Scenario 8 | 22.97 | 22.07 | 20.47 | 20.46 | 20.44 | 20.98 | 21.23 |
| Scenario | 1st Bus SOC (%) | 2st Bus SOC (%) | 3st Bus SOC (%) | 4st Bus SOC (%) | 5st Bus SOC (%) | 6st Bus SOC (%) | Average SOC Consumption (%) |
|---|---|---|---|---|---|---|---|
| Scenario 5 | 23.33 | 22.55 | 20.98 | 19.96 | 19.79 | 19.99 | 21.1 |
| Scenario 6 | 23.33 | 22.55 | 21.05 | 21.58 | 19.89 | 19.85 | 21.32 |
| Scenario 7 | 23.33 | 22.55 | 21.05 | 21.01 | 21.51 | 19.93 | 21.56 |
| Scenario 8 | 23.33 | 22.55 | 21.05 | 21.01 | 20.99 | 21.57 | 21.75 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, S.; Nam, S.; Sankar, G.S.; Han, K. Evaluating the Efficiency of Connected and Automated Buses Platooning in Mixed Traffic Environment. Electronics 2022, 11, 3231. https://doi.org/10.3390/electronics11193231
Park S, Nam S, Sankar GS, Han K. Evaluating the Efficiency of Connected and Automated Buses Platooning in Mixed Traffic Environment. Electronics. 2022; 11(19):3231. https://doi.org/10.3390/electronics11193231
Chicago/Turabian StylePark, Suyong, Sanghyeon Nam, Gokul S. Sankar, and Kyoungseok Han. 2022. "Evaluating the Efficiency of Connected and Automated Buses Platooning in Mixed Traffic Environment" Electronics 11, no. 19: 3231. https://doi.org/10.3390/electronics11193231
APA StylePark, S., Nam, S., Sankar, G. S., & Han, K. (2022). Evaluating the Efficiency of Connected and Automated Buses Platooning in Mixed Traffic Environment. Electronics, 11(19), 3231. https://doi.org/10.3390/electronics11193231