1. Introduction
Currently, non-metallic pipes and composite components such as fiber-reinforced plastic (FRP), glass-reinforced epoxy resin (GRE), high-density polyethylene (HDPE), reinforced rubber expansion joints (REJs), carbon fiber-reinforced plastic (CFRP), and polyvinyl chloride (PVC) are taking over metallic pipes and components due to advantages such as durability, low cost, light weight, resistance to corrosion, etc. Thus, the growing use of these components requires the development of proper non-destructive testing (NDT) techniques for inspection of such materials.
Traditional NDT techniques like ultrasonic testing, eddy current, radiography, and magnetic flux leakage cannot be used to fulfill the evaluation of certain materials such as non-metallic pipes due to various reasons. For instance, ultrasonic testing [
1,
2] is not suitable to be used for FRP/GRE [
3] pipes due to their complex structure of composite materials. Additionally, ultrasonic testing is not suitable for inspection of HDPE thermal fusion joints due to the nature of defects and failure morphology [
4,
5].
Microwave testing can be used as an NDT technique for inspection of material integrity and condition monitoring. For a more detailed review of microwave NDT methods and applications, please refer to [
6,
7,
8,
9]. With the increasing demand for NDT of non-metallic pipes, microwave imaging has been proposed to inspect defects, cracks, and discontinuities in such components [
10,
11,
12,
13,
14,
15,
16,
17,
18]. Recently, holographic microwave imaging has been employed for these applications. Holographic microwave imaging is known to be a fast, robust, and low-cost technique that has been applied in various industrial sectors such as security screening of passengers at airports [
19]. In particular, holographic imaging techniques based on synthetic aperture radar (SAR) concepts have been widely studied for non-metallic pipe inspections [
19]. Initially, wide-band SAR imaging technique was applied for producing three-dimensional (3D) images of vertical cracks/flaws in HDPE pipes [
15]. However, these SAR-based techniques use far-field assumptions, which impose imaging errors for NDT of the pipes. Thus, these techniques were later modified and applied for near-field imaging of non-metallic pipes [
20]. This has been accomplished by employing the information related to a specific imaging system
a priori through the measurement of point-spread functions (PSFs) [
21]. To elaborate further on this issue, in the
original holographic imaging techniques [
19,
22], far-field assumptions, point-wise antennas, and exact background properties were employed to derive the image reconstruction algorithms. However, in the recently proposed
near-field holographic imaging techniques [
21], it has been shown that the product of the incident field and the Green’s function can be obtained by measuring the PSFs of the imaging system. Thus, due to directly measuring the PSF information using the utilized antennas, the use of near-field holographic imaging reduces different types of errors such as modeling errors, errors due to uncertainties in the material properties, and errors due to the size of antennas. In [
20], by employing an array of antennas outside or inside double pipes, the narrowest band data (6–8 GHz) were collected via cylindrical apertures and then 2-D images of the defects on the pipes were reconstructed using near-field holographic imaging. The use of narrowband data allows for reducing the errors due to the material’s dispersive properties and lowering the cost and complexity of the imaging system [
20,
23,
24]. Thus, to have a low-cost system for holographic microwave imaging, a data acquisition system was built employing off-the-shelf components [
24]. Additionally, to expedite the data acquisition process, electronically scanned antennas can replace the mechanical scanning. A practical method is using antenna arrays along one axis and completing the data acquisition by mechanically scanning the array along the orthogonal direction [
19,
22,
25]. In [
23], the azimuthal direction (
) was electronically scanned via the use of antenna arrays while the longitudinal direction (
z) was mechanically scanned using motors. There, three processing methods were compared in terms of performance for limited and non-uniform sampling along the azimuthal direction. Results in [
23] showed that near-field holographic imaging using interpolation to produce uniform samples along the azimuthal direction followed by uniform Fourier transform works better than using non-uniform samples and non-uniform Fourier transform for the proposed setup. Another approach to tackle the problem of non-uniform sampling could be the use of an optimal sampling method proposed in [
26], which necessitated re-designing the angular distribution of the antennas.
Here, we propose the use of holographic imaging technique with arrays of antennas for inspection of multiple non-metallic pipes. The arrays are along the azimuthal direction (
) and they scan the pipes along the longitudinal direction (
z). Concentric non-metallic pipes are commonly used in different industrial sectors for various purposes such as protection of production tubes in oil and gas extraction [
27] and fluid transfer (to separate different fluids) [
28]. The proposed system allows for fast data acquisition, which facilitates the development of a real-time imaging system to inspect long, concentric pipes. Similar to [
23], to solve the relevant systems of equations in near-field holographic microwave imaging, we employ interpolation, uniform Fourier transform, and Standardized low-resolution brain electromagnetic tomography (sLORETA). Instead of using a vector network analyzer (VNA), a low-cost and compact imaging system is adapted from [
23]. The main contribution of this work is related to the imaging of defects in multiple, non-metallic, concentric pipes and the capabilities and limitations of the relevant microwave imaging system. Due to the multiple scattering of the waves between the two pipes, this is a more challenging imaging problem compared to the one in [
23] (imaging of objects in a homogenous background medium). By using antenna arrays, the data acquisition is significantly expedited for longitudinally long structures such as pipelines, which, in turn, leads to faster inspection of such structures. For this purpose, we first study the effect of important parameters such as defect size, number of frequencies, standoff distance of the antennas, and property of the fluids carried by the pipes. Then, we demonstrate the performance of the proposed system through experimental results.
2. Theory
First, we present the holographic near-field microwave imaging for inspection of multiple pipes when using the data acquired by an array of antennas distributed along the azimuthal axis. The imaging algorithm is adapted from [
23].
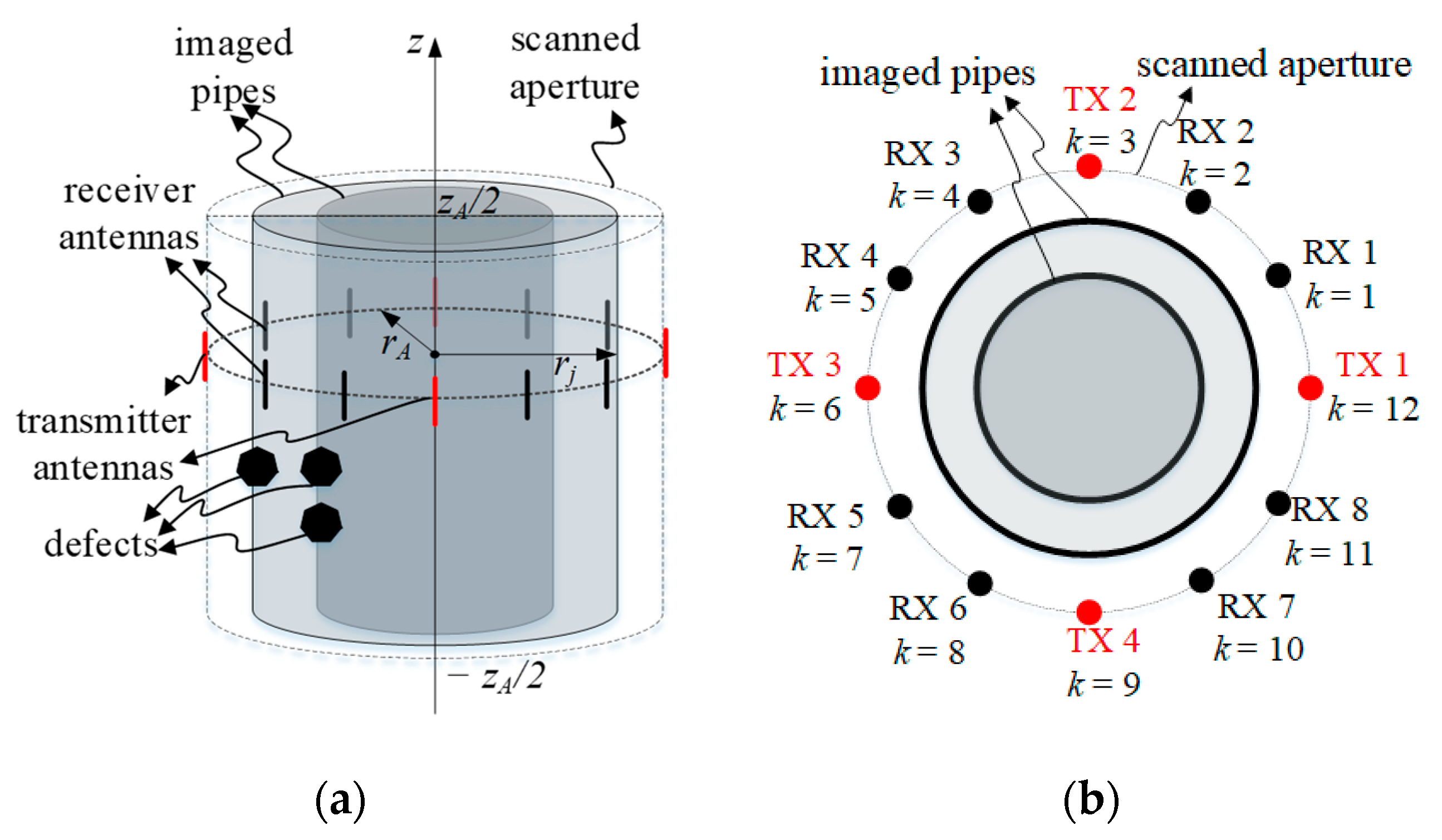
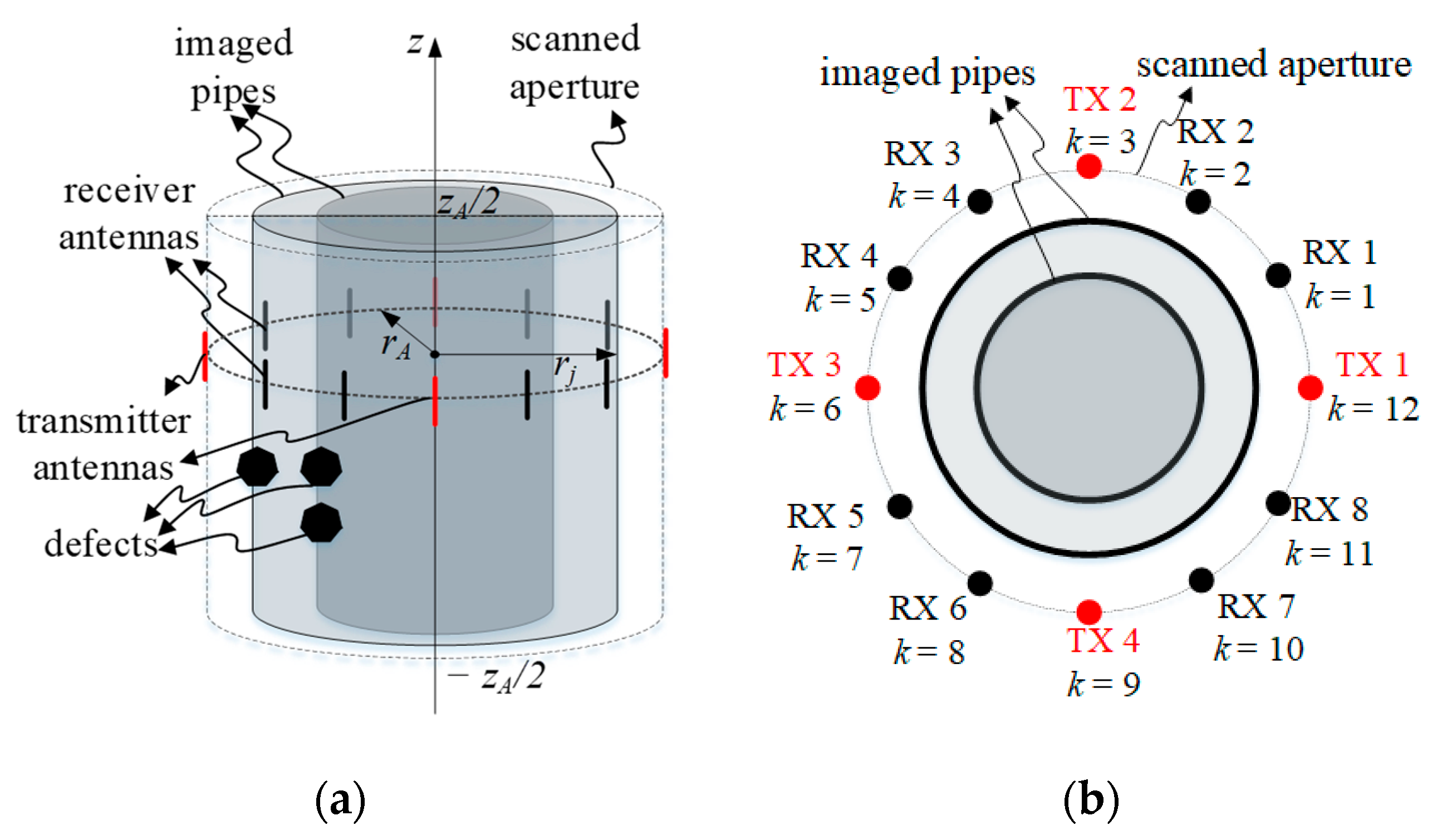
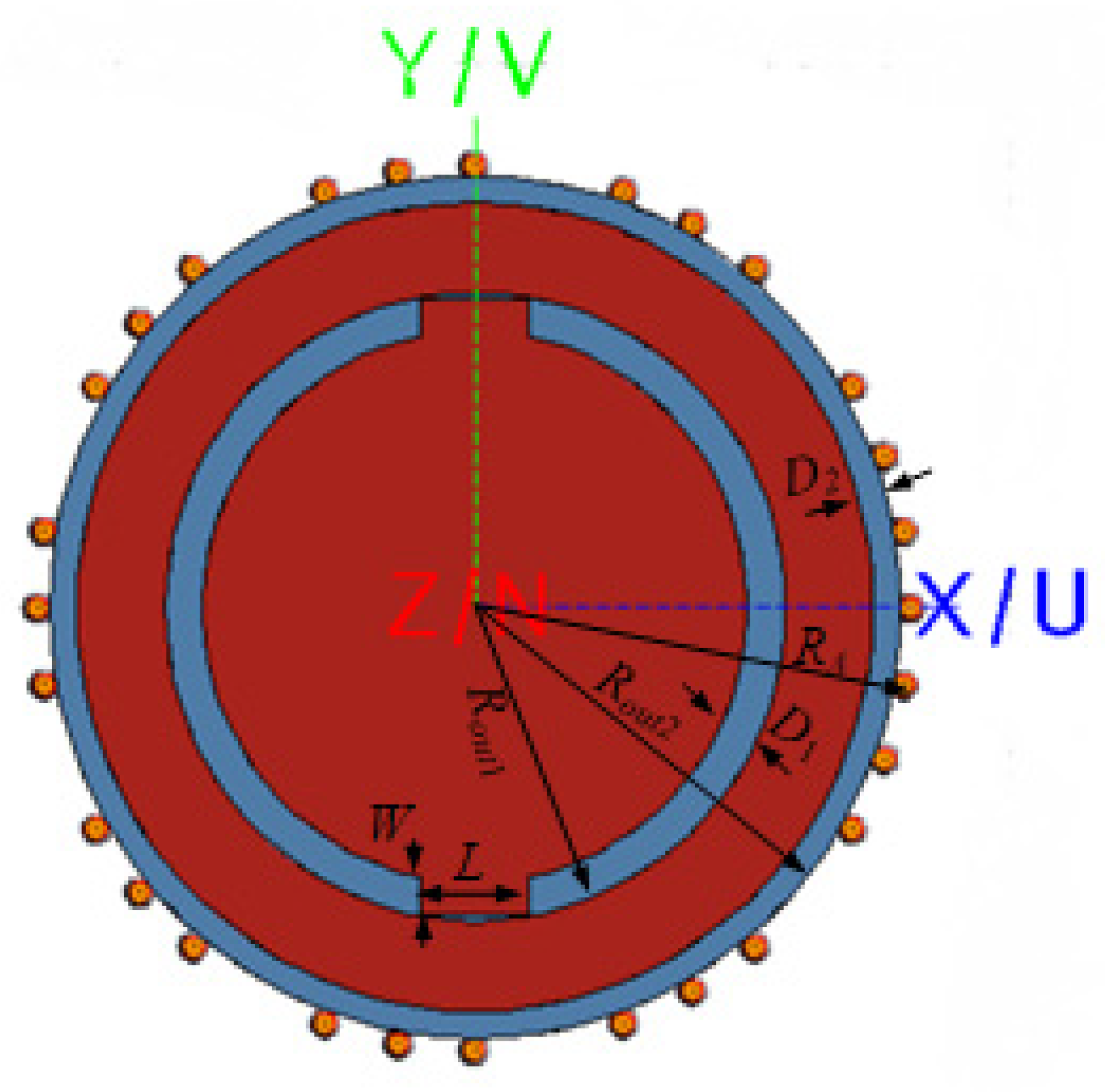
Figure 1 illustrates the imaging setup with the transmitter and receiver antenna arrays for the inspection of double concentric pipes. In this microwave imaging system,
NT transmitter antennas are distributed uniformly along the azimuthal direction with angular separation of
. Additionally,
receiver antennas separated by
are placed between two consecutive transmitter antennas. Thus, we have
receiver antennas and overall
antennas uniformly distributed over the azimuthal direction. The scanned cylindrical aperture has a radius of
rA and height of
. While scanning along the azimuthal direction is implemented electronically using the utilized antenna arrays, scanning along the longitudinal direction (at multiple heights
,
) is implemented by mechanically moving the antenna array and collecting data at frequencies
within the band of
to
The number of imaged pipes is denoted by
and the pipes have radii of
,
.
Commonly, in near-field microwave holographic imaging techniques, the imaging system is assumed to be linear and space invariant (LSI). Thus, as a first step, point-spread functions (PSFs) of the imaging system are collected for each imaged pipe. This is implemented by placing a small defect, called calibration defect (CD), on each pipe j and measuring the scattered responses for each illuminating transmitter am and each measurement frequency (where ) and received by all receiver antennas at angles of (where ). In practice, CDs are the smallest measurable defects on each imaged pipe, representing an impulse function input to the LSI imaging system.
For the test scenario, the scattered response for all defects on all the pipes is excited by each transmitter am and recorded by all receiver antennas at all frequencies . Since the collected responses and () are non-uniform along the azimuthal direction, first, interpolation is employed to obtain responses and () that are uniformly distributed along that direction.
When using superposition principle, the interpolated scattered field
can be approximated by the sum of the terms
, which are the scattered responses from the defects over each pipe
j. Due to the LSI assumption,
can be, in turn, written as the convolution of the PSF collected for pipe
j,
, with the shape function of the defects for the corresponding pipe
. According to the abovementioned approximations,
is written as:
where
and
denote the convolutions along the azimuthal (
) and longitudinal (
z) directions. In [
21], it was shown that the shape function
is related to the contrast in dielectric properties with respect to the background medium, assuming that such contrast is independent of the frequency over a narrow band. Writing Equation (1) at all measurement frequencies
,
, we obtain the following system of equations:
By applying discrete-time Fourier transform (DTFT) along
z and discrete Fourier transform (DFT) along
to both sides of the equations in Equation (2), the following system of equations are obtained at each spatial frequency pair
(where
and
are Fourier variables corresponding to
and
z variables, respectively):
where
,
, and
are functions after taking DFT along
and DTFT along
z axis of
,
, and
, respectively. The DTFT along
reduces to DFT due to the periodicity of the functions along that direction.
By writing Equation (3) for all
NT transmitters, a system of equations with shared unknown parameters
is obtained at each spatial frequency pair
as:
where
and
Such system of equations is solved using the sLORETA approach (for details please refer to [
23]) at each
pair to obtain the values for
,
. Then, inverse DTFT along
z and inverse DFT along
are applied to reconstruct images
over all the surfaces with radii
,
. At the end, the normalized modulus of
,
(called normalized image), where
is the maximum of
for all
, is plotted to obtain a two-dimensional (2D) image of each pipe.
4. Experimental Results
In this section, we present the results when using a low-cost microwave data acquisition system for imaging of double concentric PVC pipes. The operating frequency is from 1.5 GHz to 1.9 GHz (centering at 1.7 GHz).
4.1. Data Acquisition System
The imaging system consists of microwave boards for transmission and reception of signals, transmitter and receiver antenna arrays, two switching networks for the arrays, a control and processing unit, and a scanning setup, which is adapted from [
23].
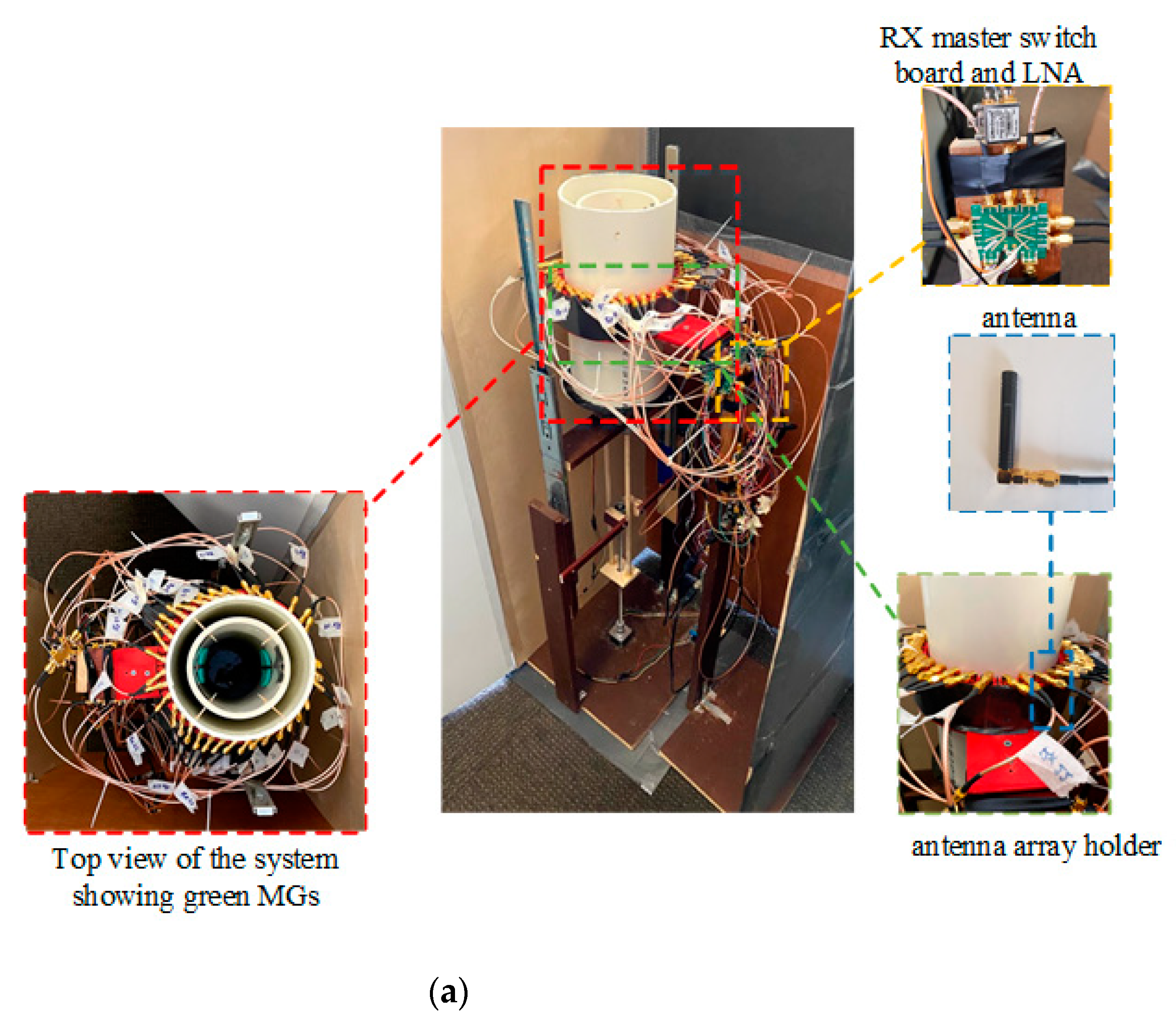
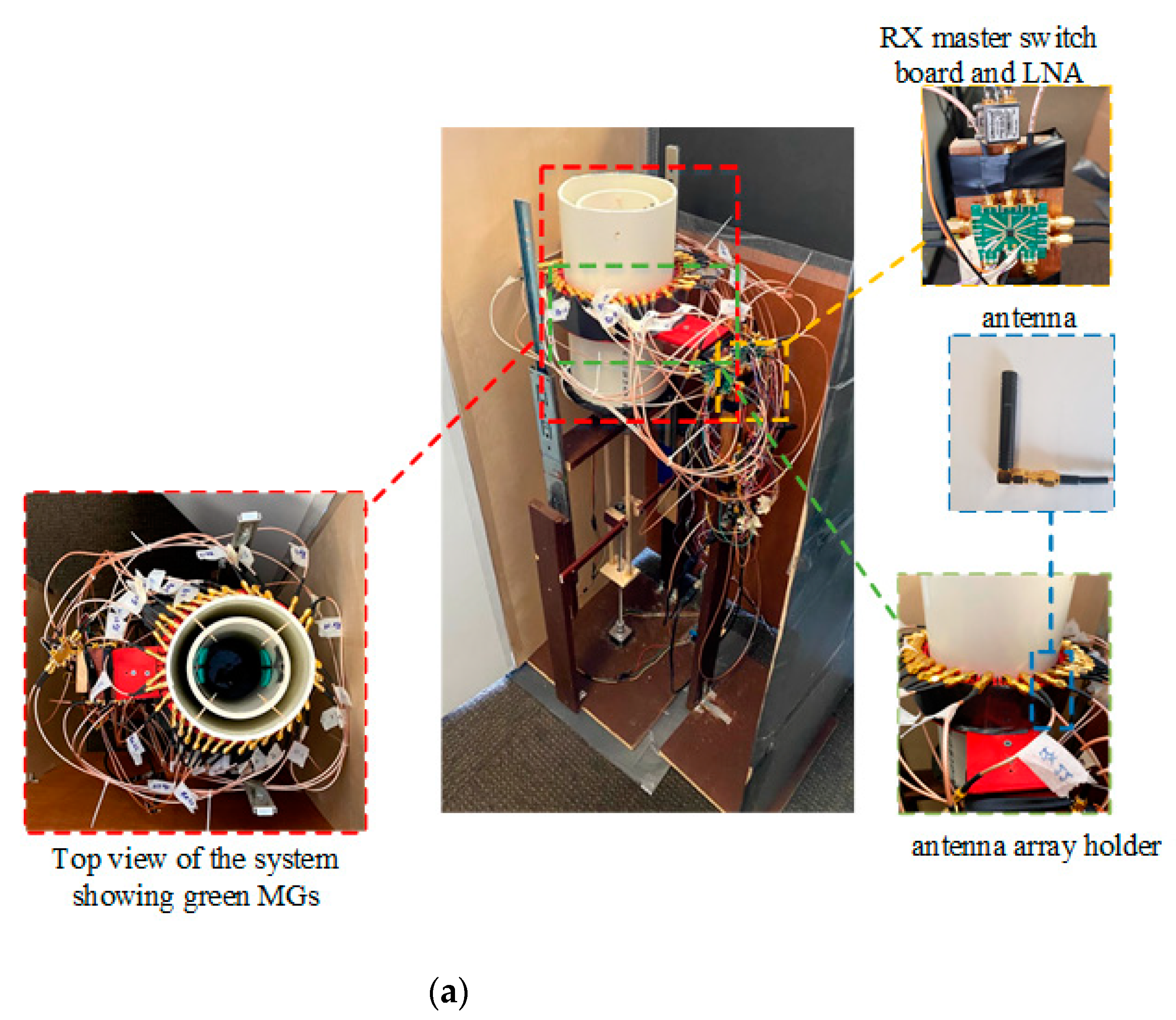
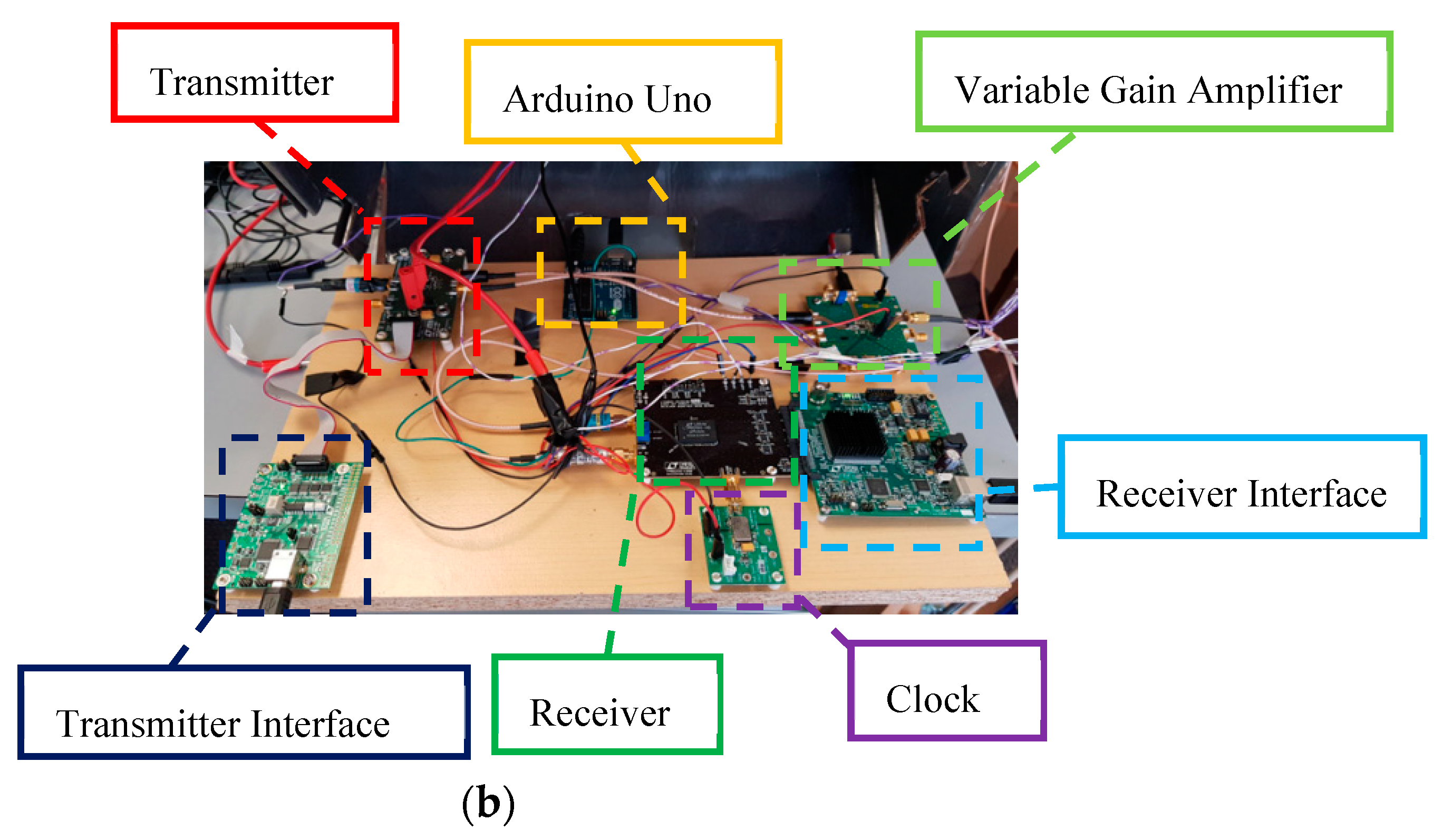
Figure 11 shows the main components of the experimental setup.
Here, two PVC pipes contain a liquid mixture of 60% water and 40% glycerin with relative permittivity of 62 and conductivity of 2.15 S/m at the operating frequency band [
30]. The outer pipe has an inner diameter of 152 mm (6 in), a thickness of 5 mm, and a height of 300 mm. The inner pipe has an inner diameter of 101.6 mm (4 in), a thickness of 7 mm, and a height of 282 mm. For implementation simplicity, we try to image regions of material gains (MGs) instead of material loss (defects) in our experiments. The used MGs are circular-shaped PVC materials with a diameter of 50 mm. During the scan, the system moves the two pipes with liquid mixture along the longitudinal direction (
z).
The number and spatial distribution of the antennas are similar to the ones in the simulations, e.g., see
Figure 2. The transmitter antennas are separated by
= 40°. The adjacent receiver antennas are separated by
= 10° (no receiver antennas at the transmitter antennas’ positions). A custom, 3D-printed holder, which consists of 36 circular slots to place the antennas, is made to keep the antennas in close contact with the outer pipe. Additionally, to lower the direct coupling between the adjacent antennas, microwave absorbing sheets are inserted in the 36 slots with widths of 1 mm in between antennas. On the outer surface of the antenna holder, we attach a microwave absorbing sheet to further reduce the interferences. For a fast, proof-of-concept prototype, commercial antennas are used. They are mini GSM/Cellular Quad-Band antennas from Adafruit Company.
The frequency synthesizer is DC1705C-B from Analog Devices, operating from 0.513 GHz to 4.91 GHz, and the direct conversion receiver is DC1513B-AB from Analog Devices, operating from 0.7 GHz to 2.7 GHz. Further details regarding these modules can be found in [
24]. In addition, two separate switching networks are built for selecting the transmitter and receiver antennas using EV1HMC321ALP4E modules from Analog Devices. The switching networks are controlled by MATLAB via Arduino Uno boards.
4.2. Experimental 2D Imaging Results for Each Pipe
In this section, we conduct experiments for validating the performance of the proposed imaging system. The operating frequency is from 1.5 GHz to 1.9 GHz with steps of 0.1 GHz (centering at 1.7 GHz). The experiments are implemented on two concentric PVC pipes with MGs either attached on the inner surface of the outer pipe or inner pipe.
We consider two experiments: (1) Two MGs are placed on the inner surface of the outer pipe and (2) two MGs are placed on the inner surface of the inner pipe. For both experiments, data acquisition is implemented electronically along the azimuthal direction and mechanically along the longitudinal direction. Sampling along z axis with 39 steps is performed over a length of 4λ, where λ is the wavelength at 1.7 GHz for the mixture.
For each receiver antenna, the complex-valued, scattered response (R) is composed by using the outputs of in-phase (I) and quadrature (Q) channels for the receiver unit as: R = I + jQ. Here, R depends on the angular position , longitudinal position , and frequency . By default, at each data acquisition step, 1024 samples are provided by the receiver unit for each channel. Then, we average the 1024 samples for each channel to acquire I and Q values.
Measurements of PSFs are obtained by using one circular PVC MG with diameter of 50 mm and thickness of 5 mm. The MG is placed inside the outer pipe for the measurement of PSFs corresponding to the outer pipe. Then, the MG is placed inside the inner pipe to obtain PSFs corresponding to the inner pipe. Each time, the MG is placed at the origin ( and ) for the corresponding pipe.
A two-step calibration process is implemented to reduce the small differences between the receiver antennas, edge effects, and effect of background medium (pipes, liquids, stationary structures in the setup, etc.), and to obtain the response only due to the MGs. In the first step, we divide
by
to obtain
as:
where
is the longitudinal position sufficiently far from edges and MGs. In the second step, to reduce the effects of the background medium and to find the response due to the MGs, we subtract the responses without the presence of the MGs
from those with the presence of the MGs to obtain
as:
The responses are approximated by the acquired responses at positions sufficiently far from the MGs.
With the responses obtained for PSFs and MGs, implementation of the two-step calibration, applying interpolation, uniform DFT along
, DTFT along
z, and sLORETA for solving the relevant systems of equations, we reconstruct two sets of 2D images for the two experiments.
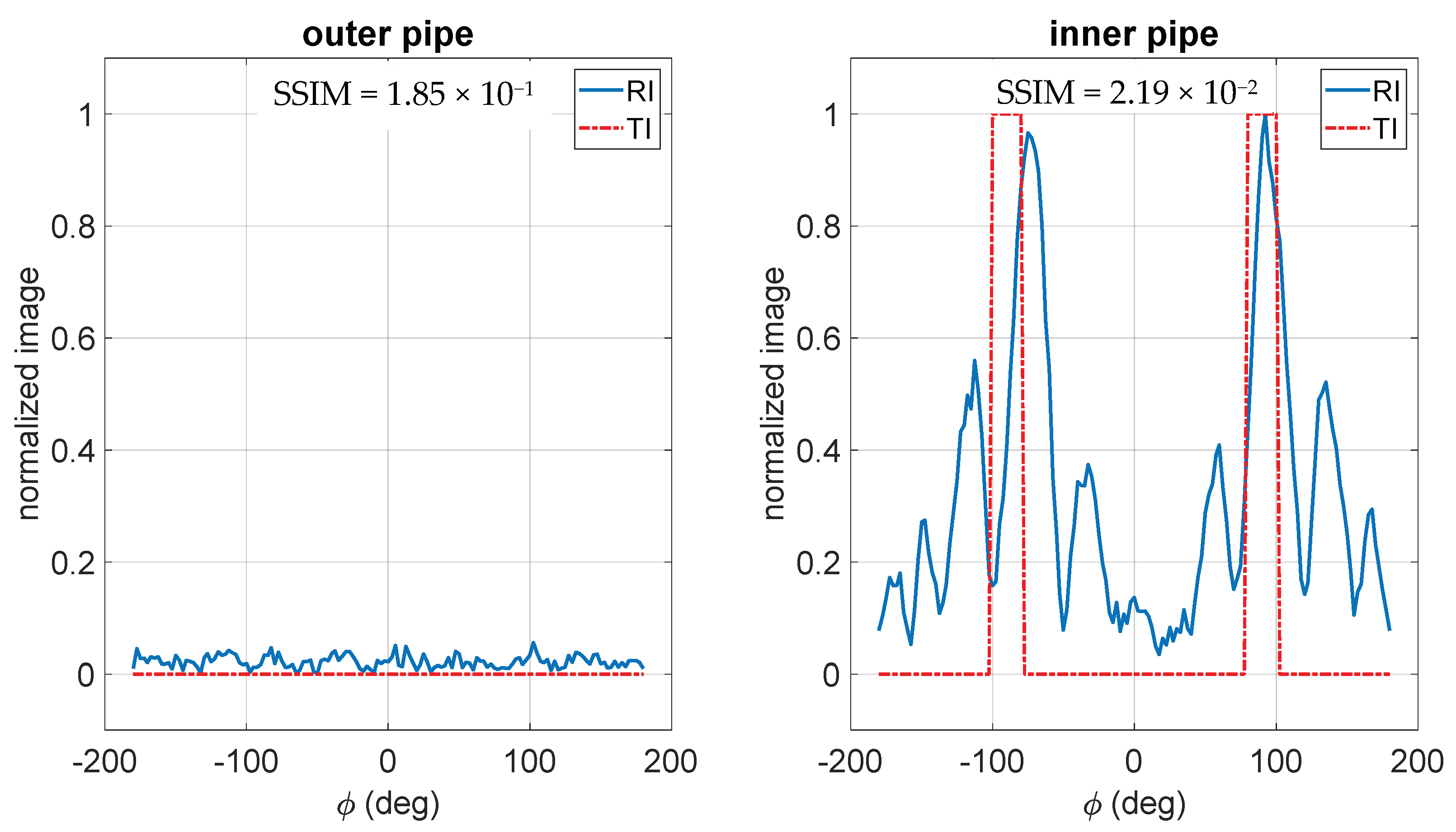
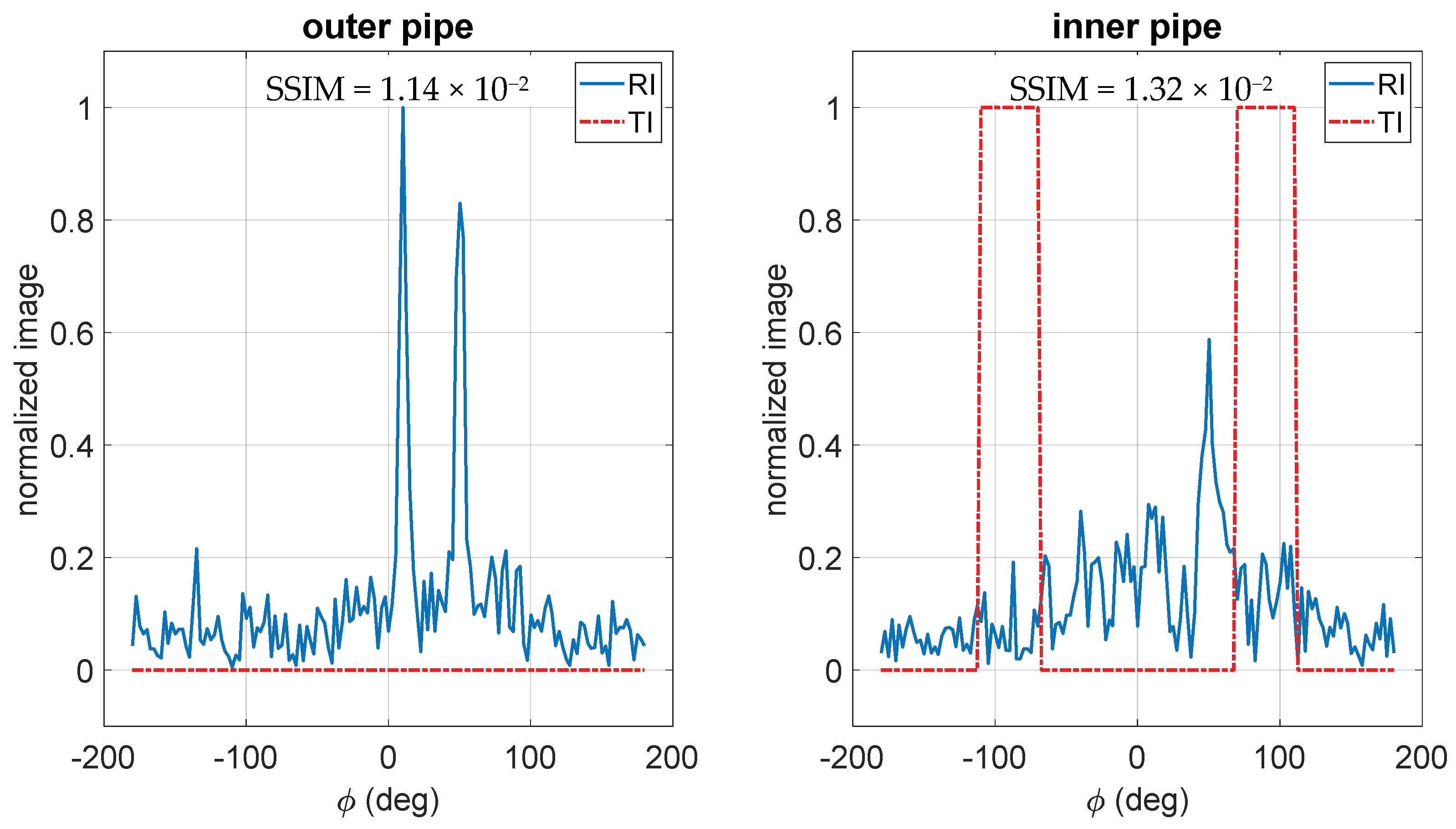
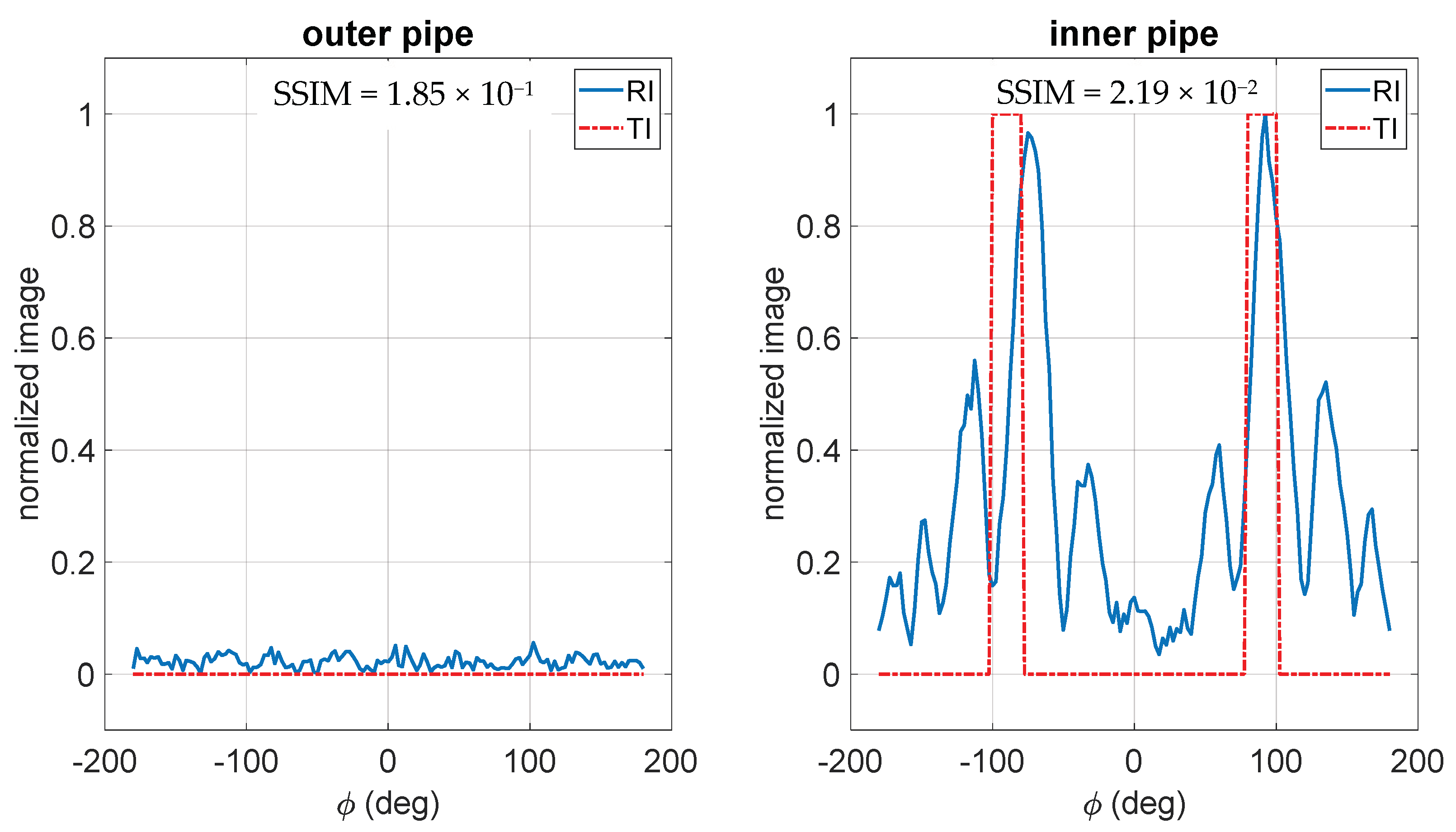
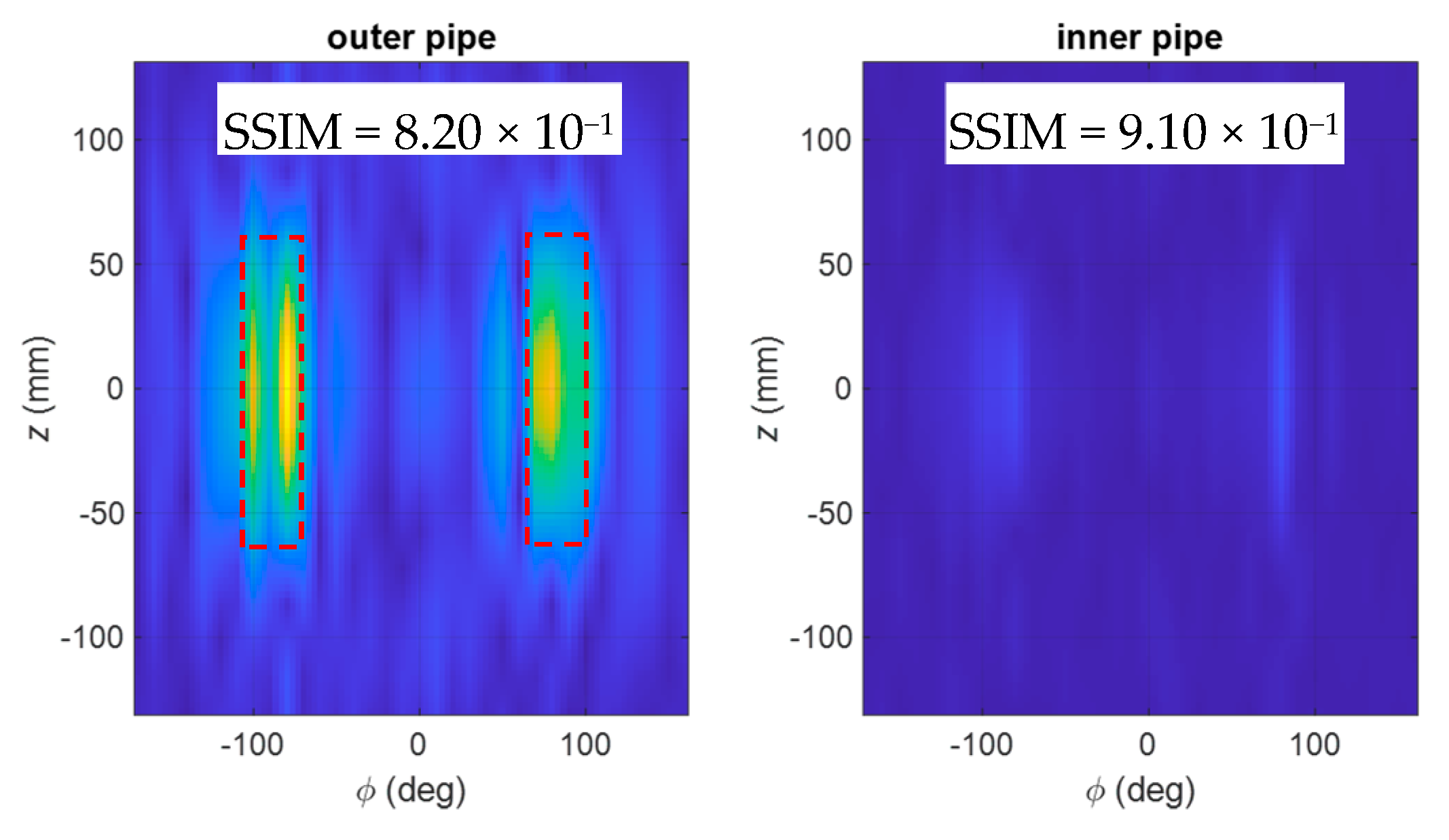
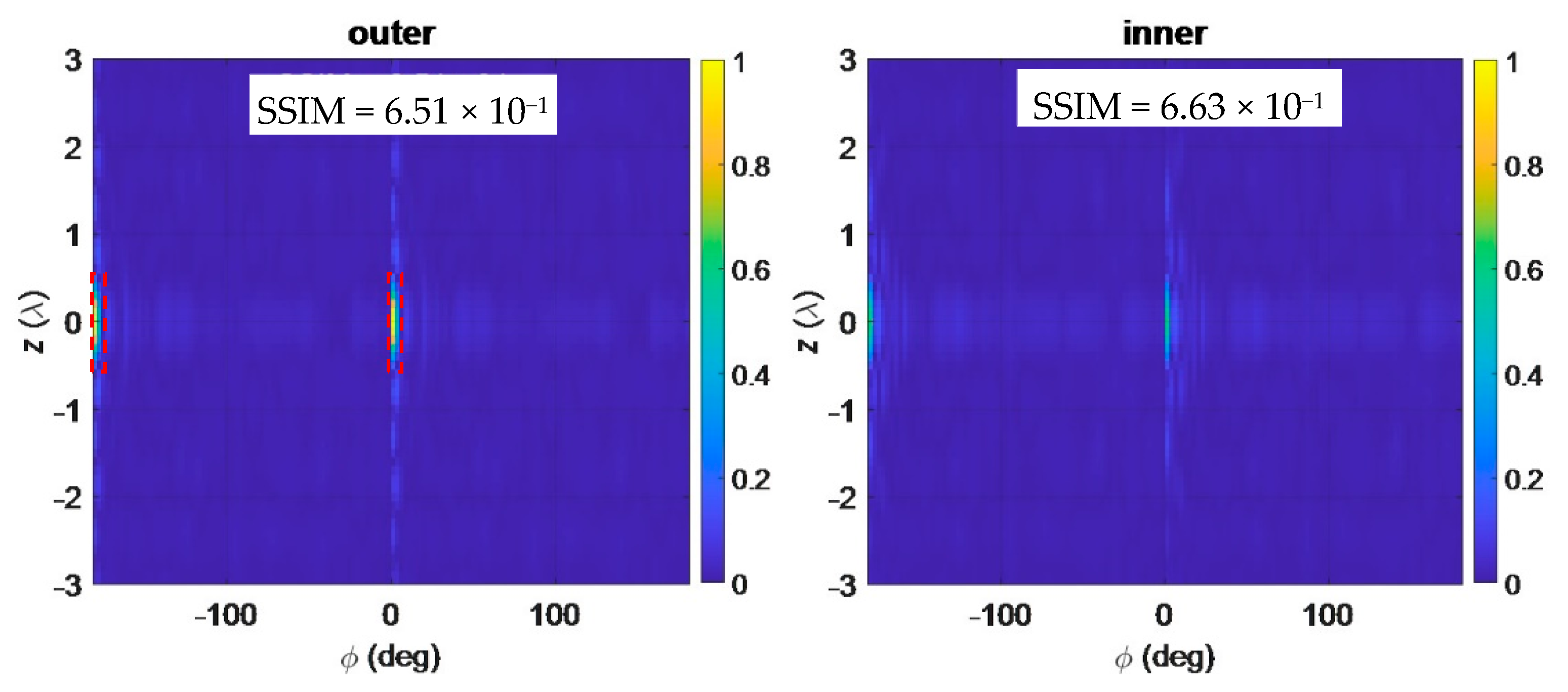
Figure 12 shows the reconstructed images when the two MGs are placed on the outer pipe with an angular separation of approximately 180
. It can be observed that the MGs are detected on the outer pipe with some slight shadows on the image for the inner pipe. The SSIMs for the inner and outer pipe images are close, demonstrating good image quality.
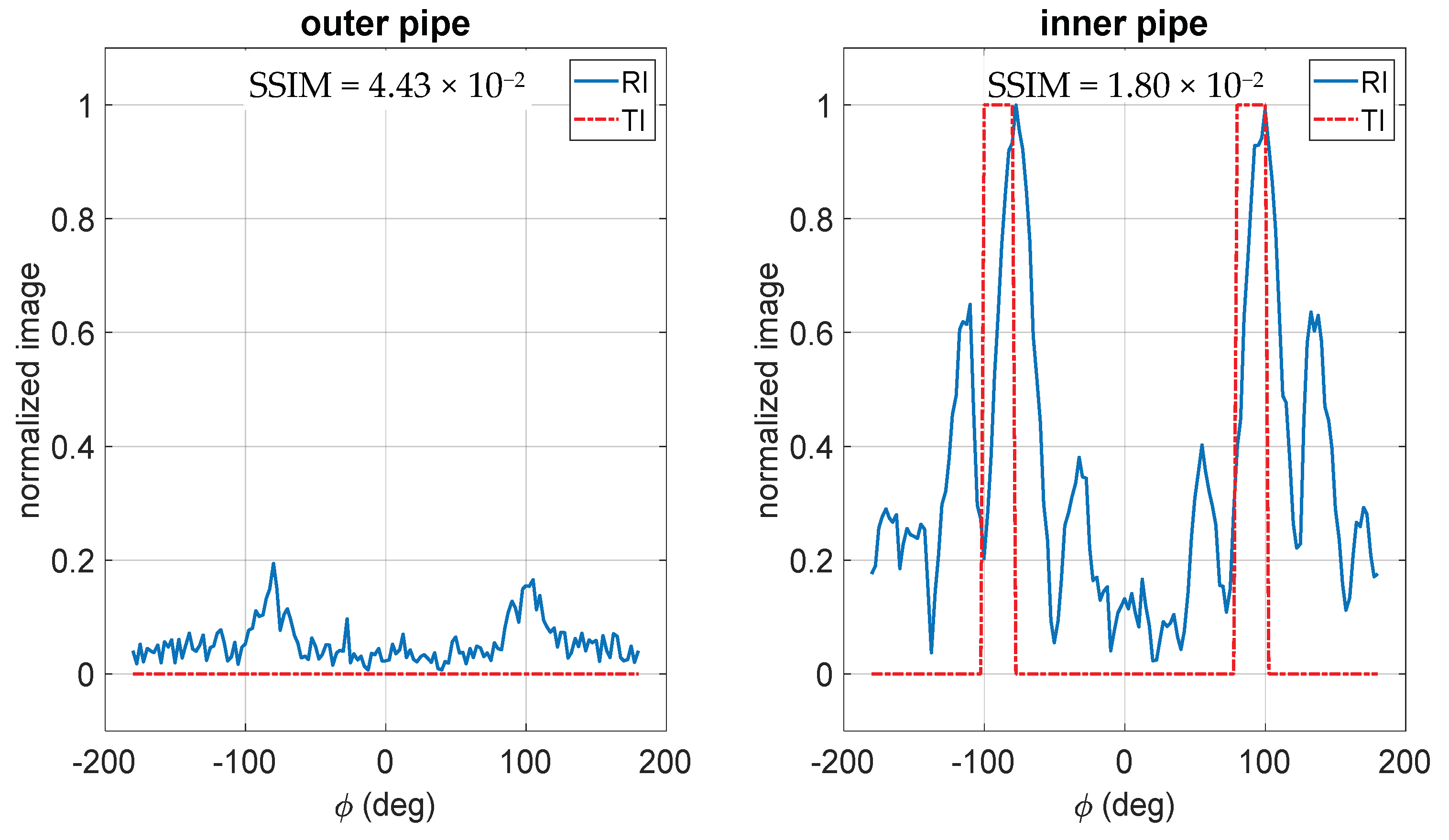
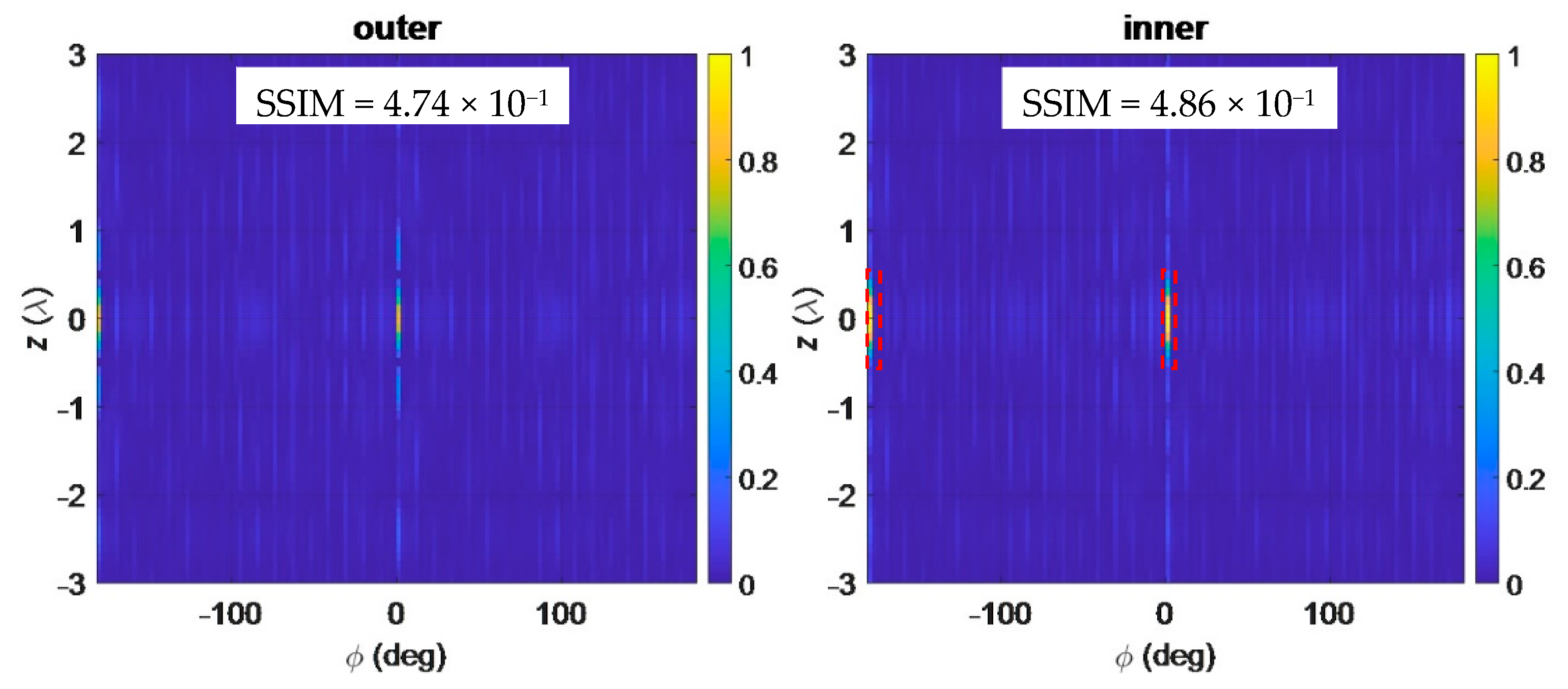
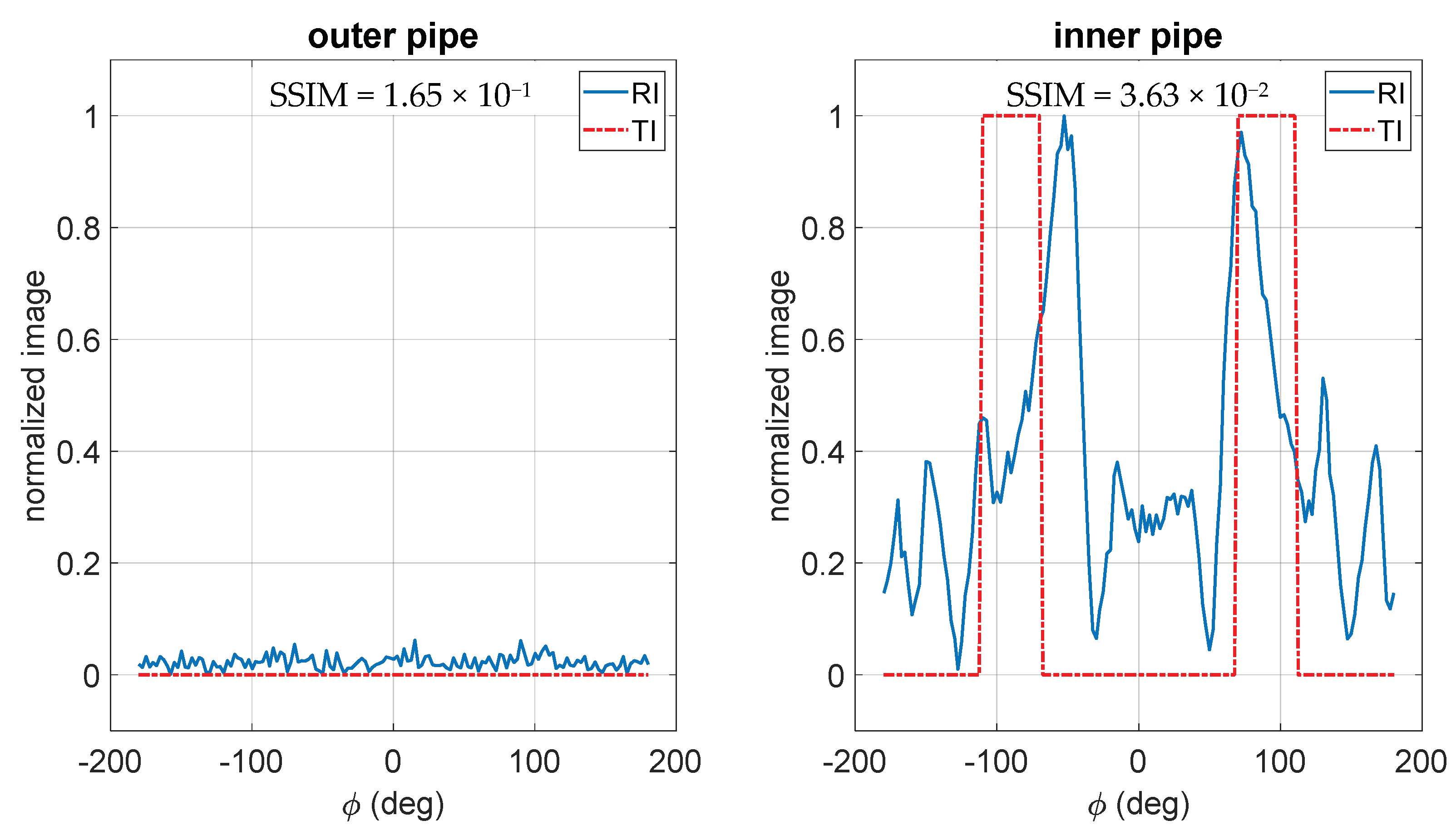
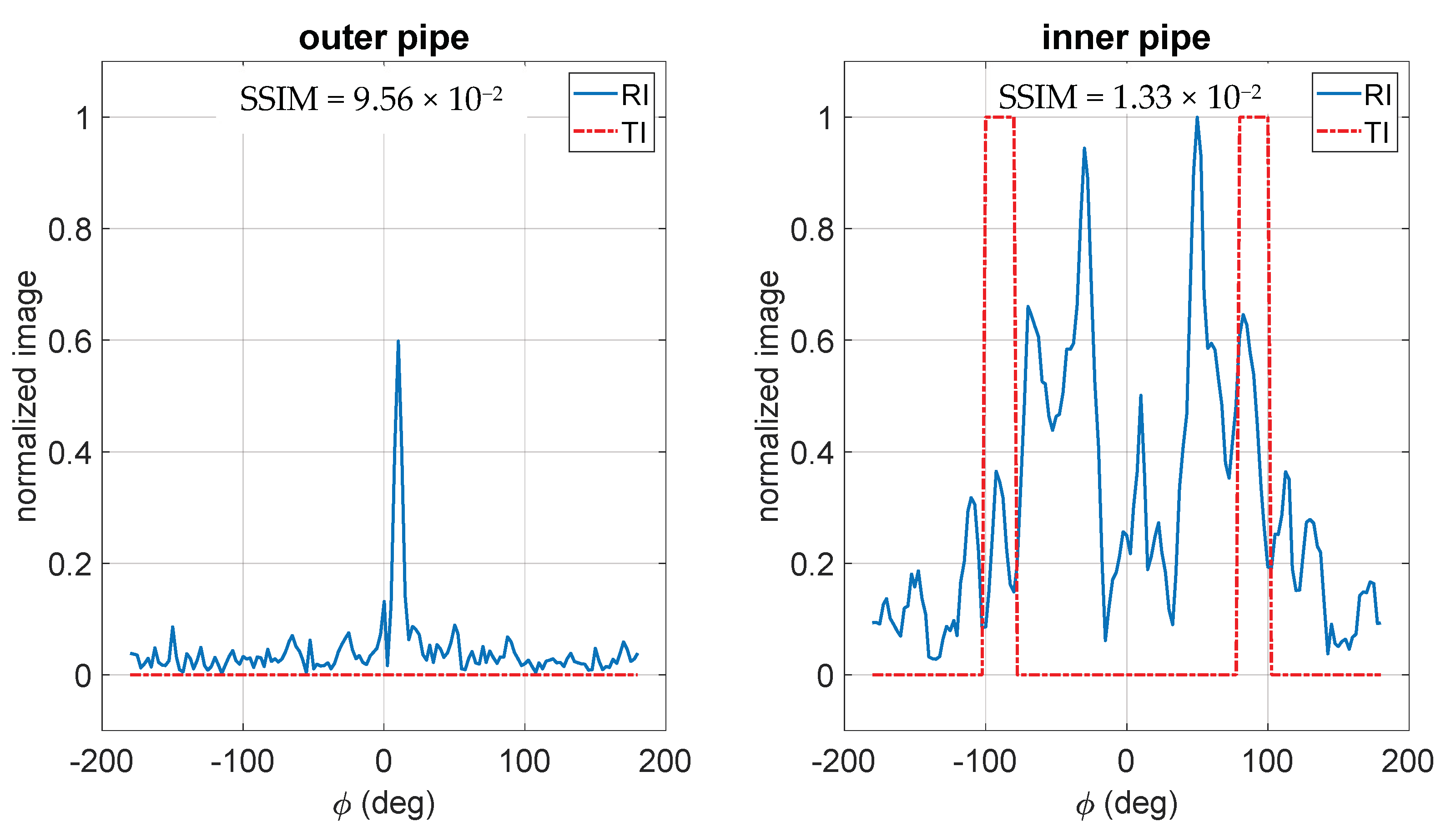
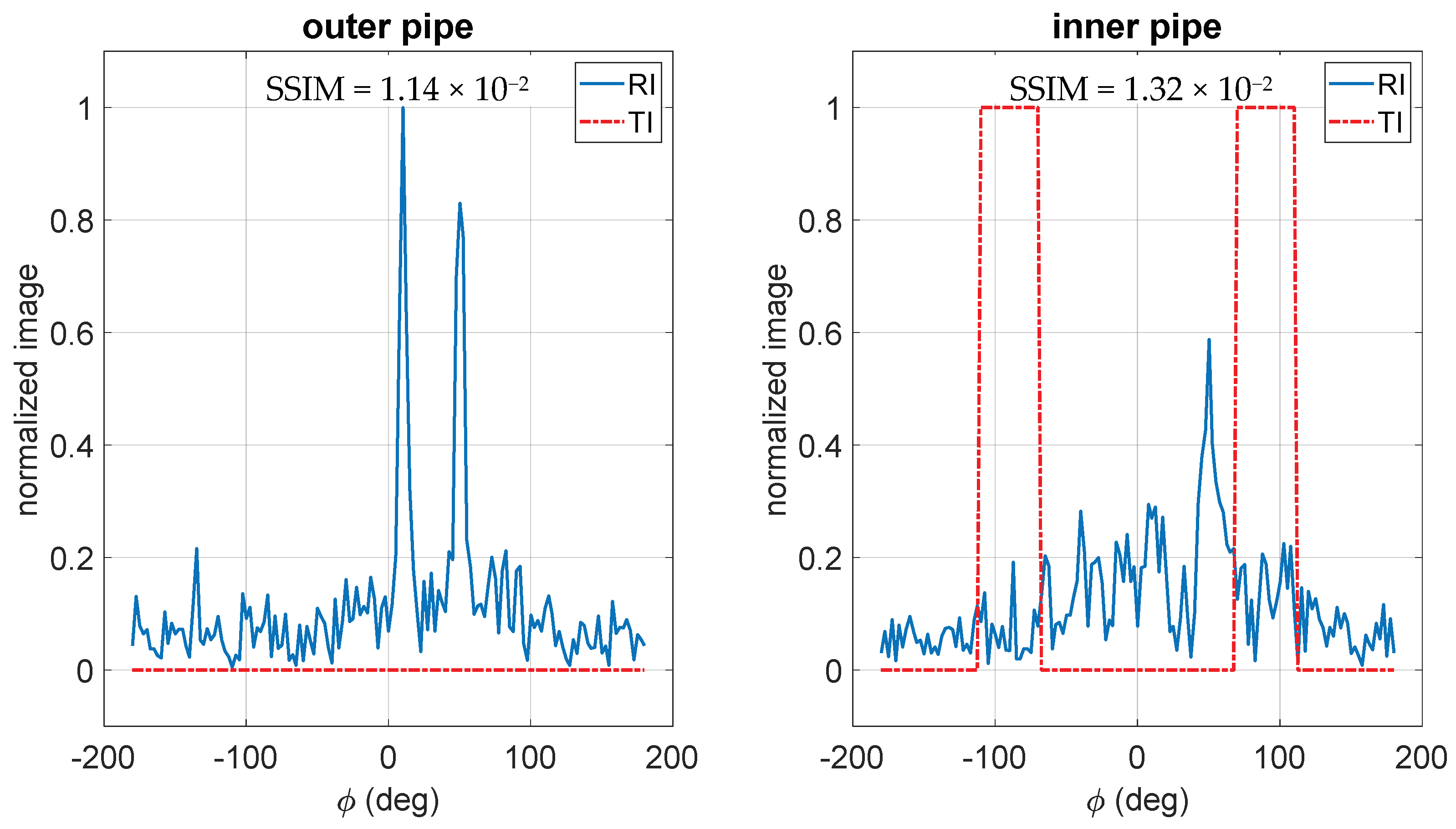
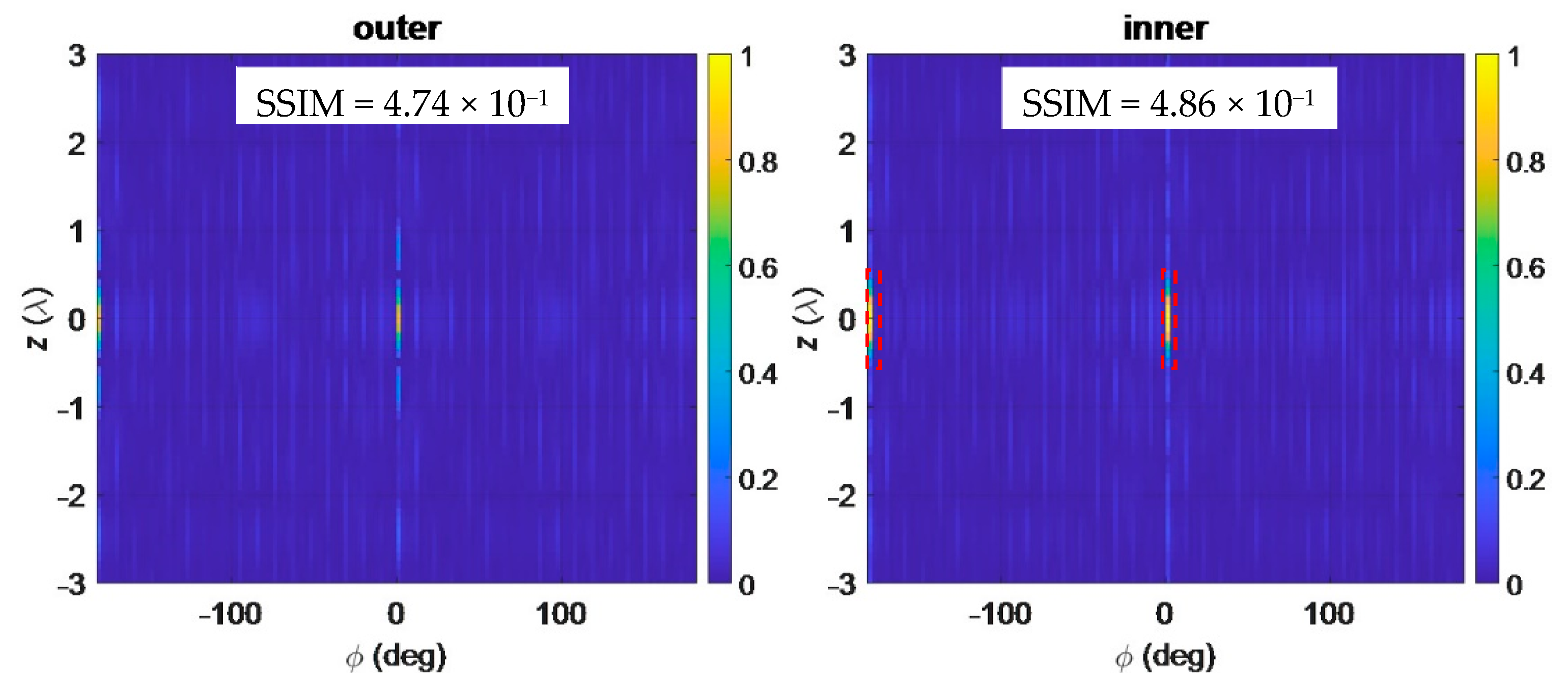
Figure 13 shows the reconstructed images when the two MGs are placed on the inner pipe with an angular separation of approximately 180
. From the reconstructed images, it can be observed that the MGs are detected correctly on the inner pipe with some shadows on the outer pipe. The shadows are stronger than those in
Figure 12 due to the fact that the responses for the MGs placed on the inner pipe are weaker (the liquid carried by the pipes was very lossy). In
Figure 13, the SSIM values for the inner and outer pipe images are close and satisfactory, but, compared to those in
Figure 12, the values are lower, as expected.
5. Discussions and Conclusions
In this paper, for the first time, the use of holographic near-field microwave imaging technique with arrays of transmitter and receiver antennas was proposed for the inspection of multiple non-metallic pipes. We utilized a low-cost data acquisition system with arrays of antennas along the azimuthal direction and scanning them along the longitudinal direction. To solve the relevant systems of equations in near-field holographic imaging, we also implemented interpolation, uniform DFT along and DTFT along z, and sLORETA approach.
Our approach was based on using the Born approximation, which assumes a linear imaging system [
21]. This allowed for fast and robust qualitative imaging, which has been already successful in various applications such as airport security scanners [
19]. It is worth noting that inspecting longitudinally long structures such as pipelines is not practical using quantitative (non-linear) imaging techniques. This is due to the fact that these optimization-based techniques have long processing times due to iterative solution of an expensive forward model [
31].
From our parametric study, it was observed that the images’ quality was better for larger defect sizes. Besides, when reducing the number of frequency data to only one frequency or changing the standoff distance of the antennas by 2 mm, the quality of the reconstructed images degraded compared to the reference case. When changing the property for the inner pipe’s liquid and outer pipe’s liquid by 18% of their true value, the image quality also degraded. Furthermore, for the outer pipe’s liquid property change, the degradation was much more drastic, to the extent that we could not detect the defects anymore.
We also used simulation data to construct 2D images for each pipe for two scenarios: two defects on the inner pipe and two defects on the outer pipe. It was observed that, for both scenarios, the defects were clearly distinguished. When defects were on the outer pipe, the image quality was slightly better, as expected.
In our experimental study, we imaged MGs on two PVC pipes carrying a liquid mixture of water (60%) and glycerin (40%), which is significantly lossy. We tested two scenarios: MGs on the outer pipe and MGs on the inner pipe. From our results, we observed that, in the two studied cases, the MGs were detected. However, it was concluded that the reconstructed images were better when the MGs were on the outer pipe, due to stronger measured responses.
Additionally, the imaging outcome for the non-metallic pipes carrying liquid are affected by temperature. As temperature changes, the dielectric properties for the liquid also changes. For instance, the change of dielectric properties for water with respect to temperature in the microwave regime was reported in [
32]. There, for water with a 30 °C temperature change, the dielectric constant changes by approximately 14% at 1 GHz. This amount of change is similar to the uncertainties in the dielectric properties of the liquids studied in our simulation result, where we had a property change of 18%. Obviously, with a higher temperature change, there will be larger image quality deterioration.
In addition, there is a limitation when detecting smaller defects due to the dynamic range of the proposed system. For a common VNA, the dynamic range at frequencies at 1 GHz to 2 GHz is around 100 dB, but for the receiver used in our study, the dynamic range is 63.5 dB. In our preliminary experimental study, we observed that the MGs used in this study were the smallest size that can be imaged reliably. In other words, the dynamic range of the receiver system used in this work limits the sensitivity of detecting smaller MGs/defects.
The proposed system can be used for fast, low-cost, and robust imaging of long, concentric, non-metallic pipes. In this study, PVC pipes were used because they are the most accessible for our proof-of-concept study. However, the proposed imaging system and the results from the parametric study can be extended for different types of non-metallic pipes since most of them have similar dielectric properties (dielectric constant in the range of 2 to 6 with very small loss in the microwave regime). In practice, we envision using such a fast imaging system for inspection of underwater pipeline structures or for above-the-ground pipeline structures. It is important to note that the imaging system for the latter application will be sensitive to the objects and environment around the pipes and proper shielding has to be applied to make the system insensitive to such interferences.





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}