0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC)


Abstract
1. Introduction
2. The Proposed MCU SOC
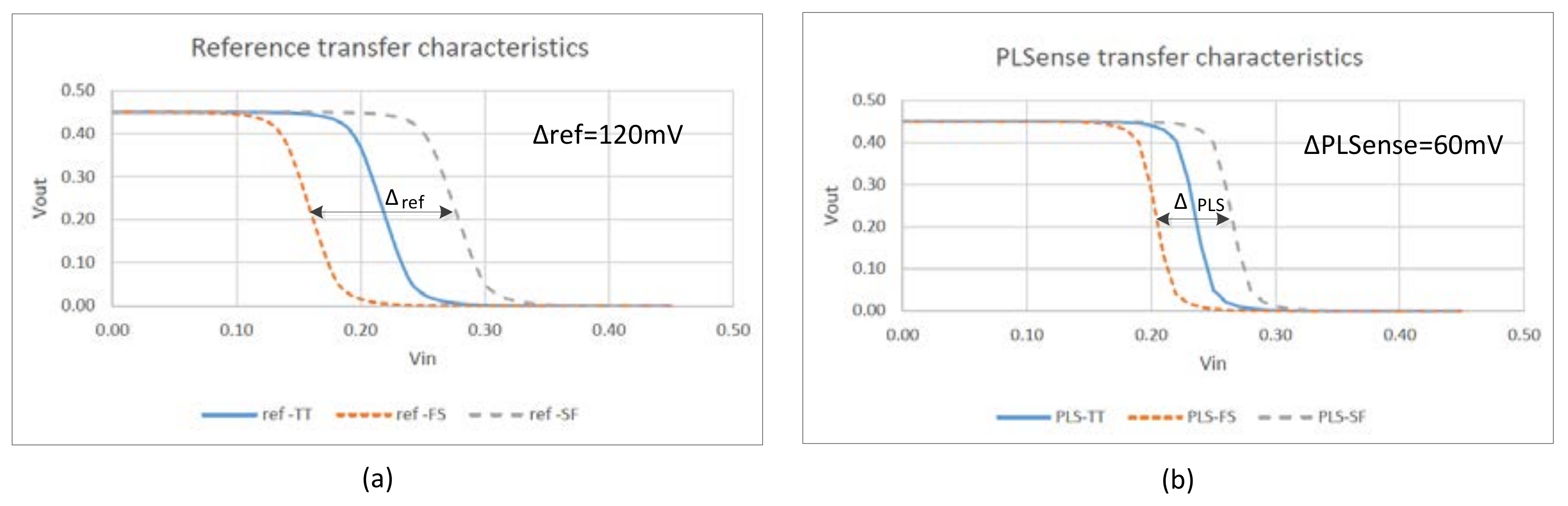
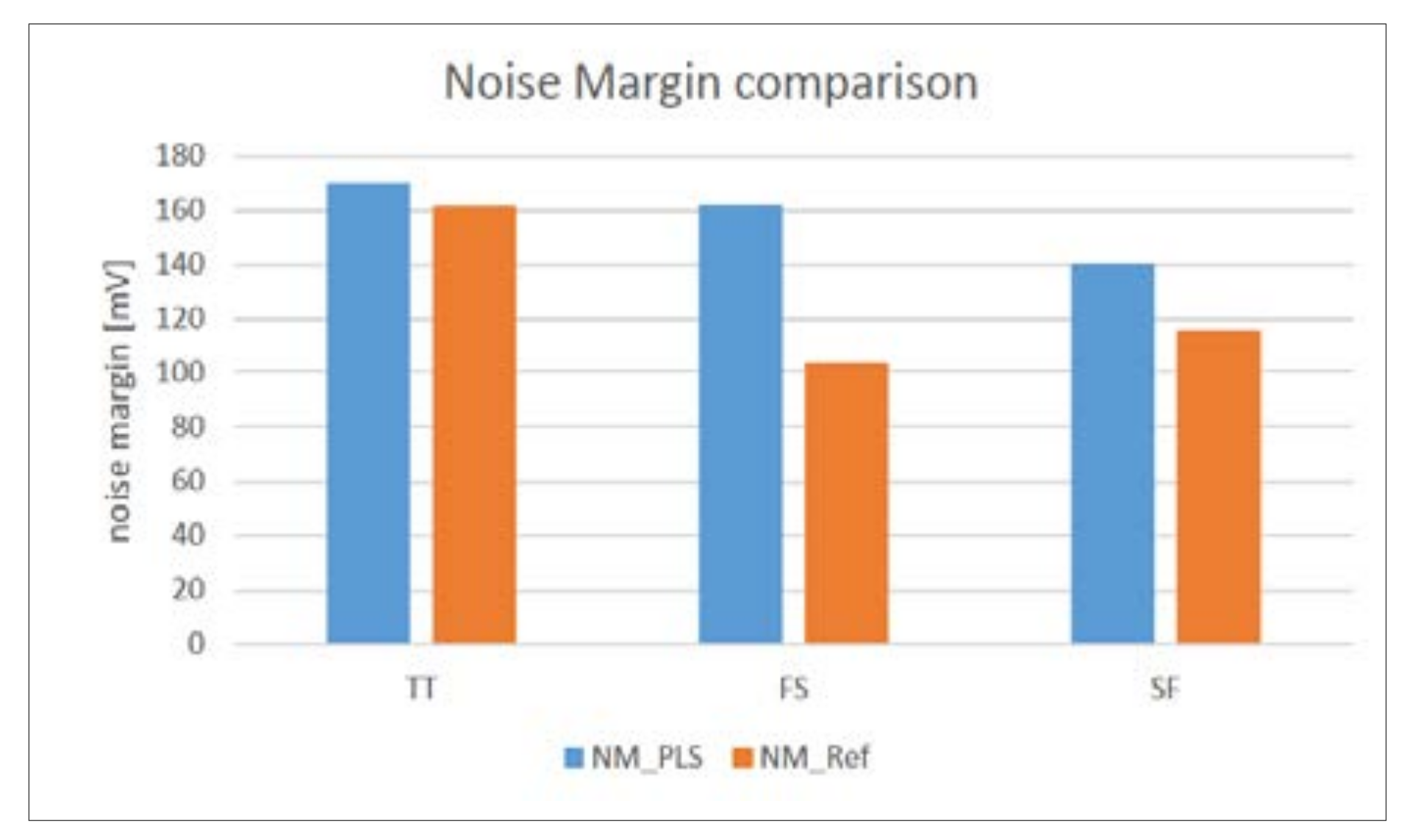
2.1. Low Voltage Libraries Characterization
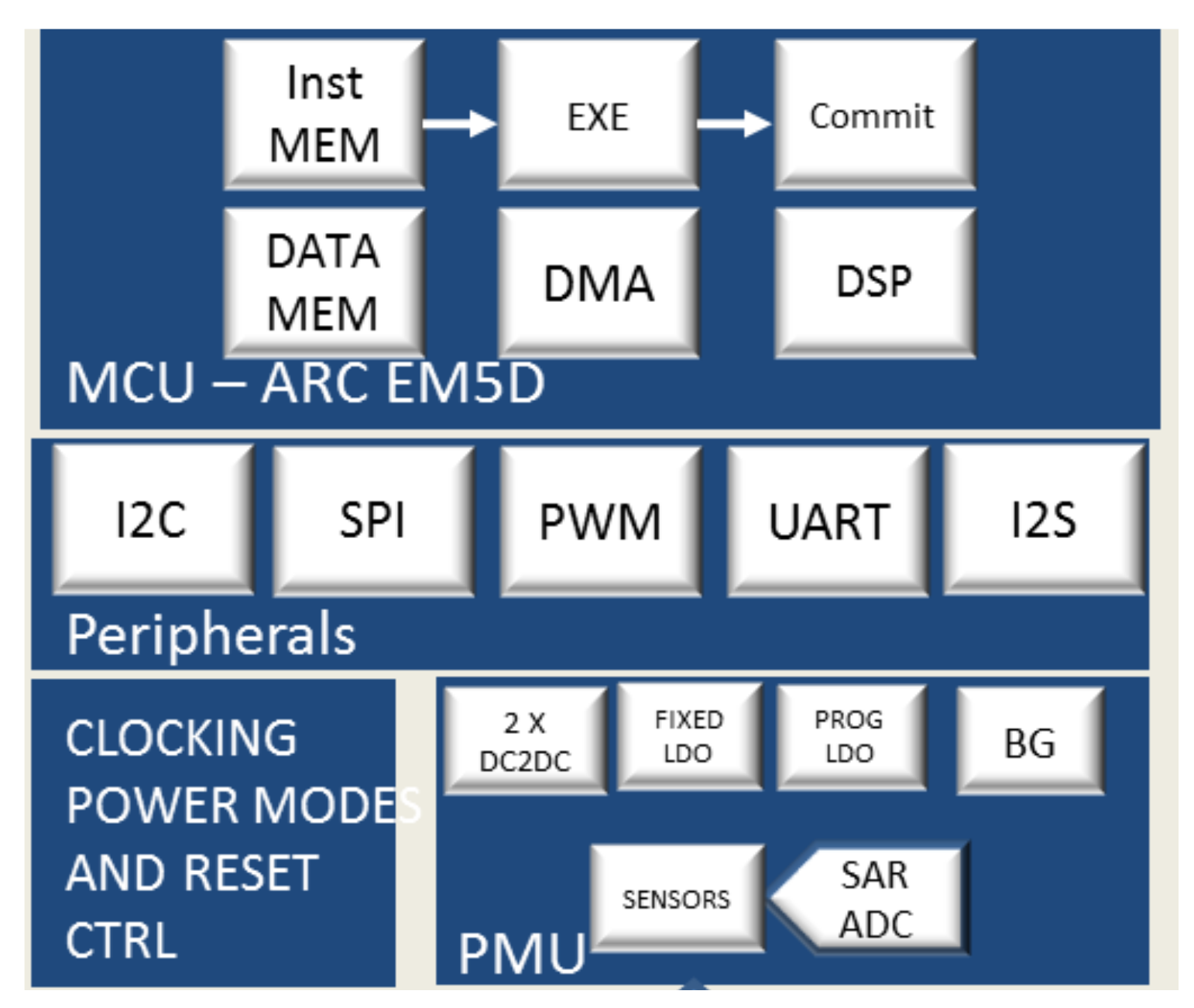
2.2. MCU SoC Architecture
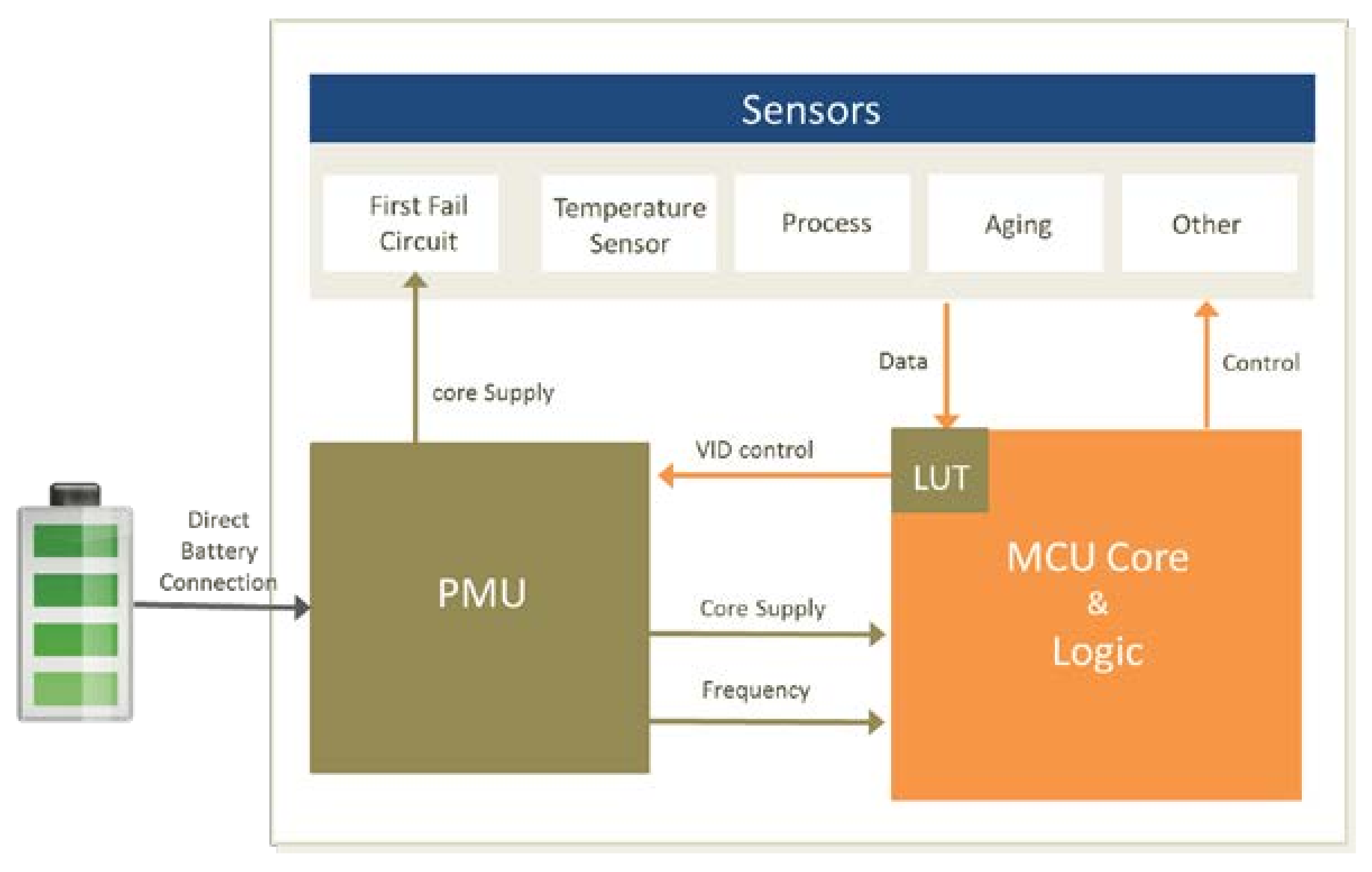
2.3. Adaptive Dynamic Voltage Control (ADVC)
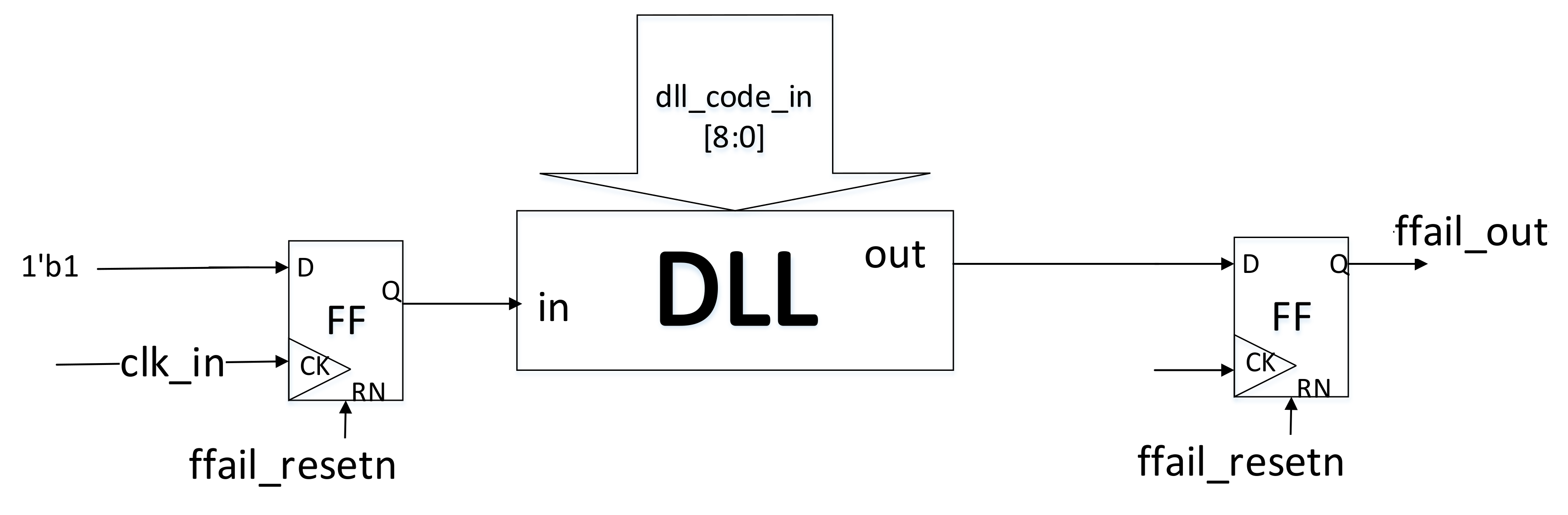
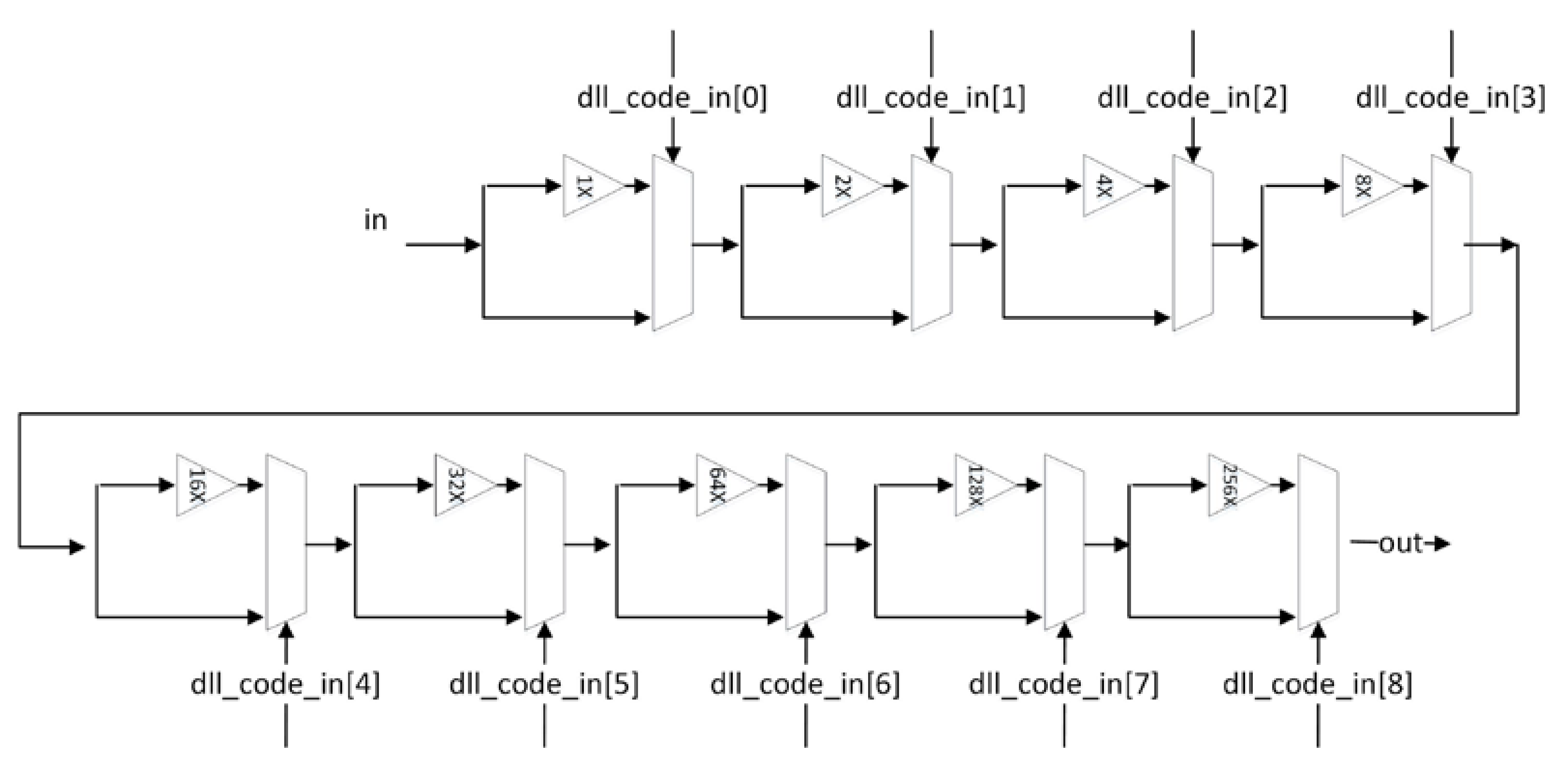
2.3.1. First Fail Circuit
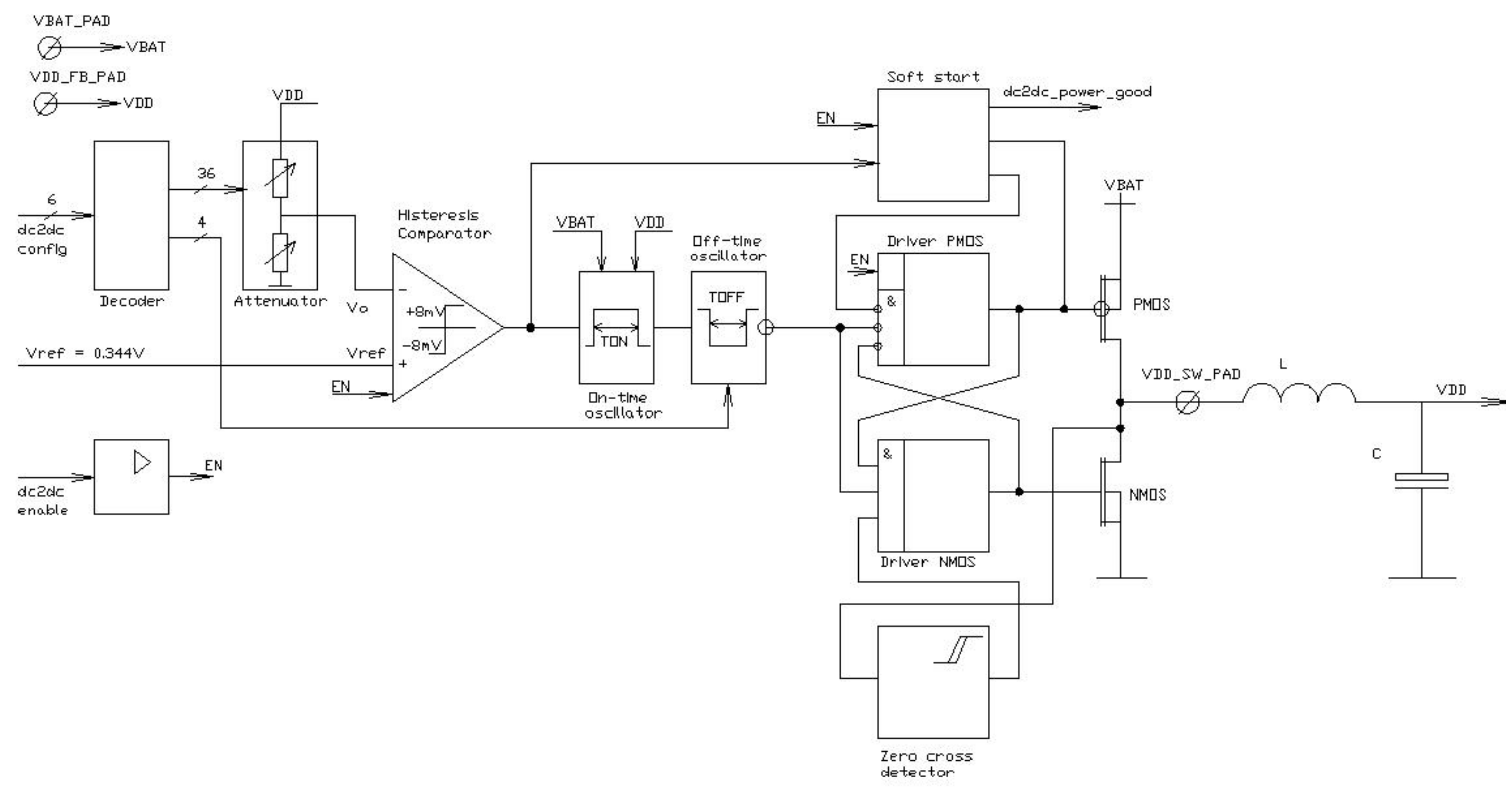
2.3.2. DC2DC
3. Measurements Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Whatmough, P.; Lee, S.K.; Lee, H.; Rama, S.; Brooks, D.; Wei, G. A 28 nm SoC with a 1.2 GHz 568 nJ/prediction sparse deep-neural-network engine with >0.1 timing error rate tolerance for IoT applications. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 5–9 February 2017. [Google Scholar]
- Kuo, F.W.; Ferreira, S.B.; Chen, H.N.R.; Cho, L.-C.; Jou, C.-P.; Hsueh, F.-L.; Madadi, I.; Tohidian, M.; Shahmohammadi, M.; Babaie, M.; et al. A Bluetooth Low-Energy Transceiver With 3.7-mW All-Digital Transmitter, 2.75-mW High-IF Discrete-Time Receiver, and TX/RX Switchable On-Chip Matching Network. IEEE J. Solid-State Circuits 2017, 52, 1144–1162. [Google Scholar] [CrossRef]
- Alioto, M. Enabling the Internet of Things: From Integrated Circuits to Integrated Systems; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Sarwesh, P.; Shekar, N.; Shet, V.; Chandrasekaran, K. Energy-Efficient Network Architecture for IoT Applications; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Bang, S.; Wang, J.; Li, Z.; Gao, C.; Kim, Y.; Dong, Q.; Chen, Y.P.; Fick, L.; Sun, X.; Dreslinski, R.; et al. 14.7 a 288 µw programmable deep-learning processor with 270 kb on-chip weight storage using non-uniform memory hierarchy for mobile intelligence. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 5–9 February 2017. [Google Scholar]
- Gautschi, M.; Schiavone, P.D.; Traber, A.; Loi, I.; Pullini, A.; Rossi, D.; Flamand, E.; Gürkaynak, F.K.; Benini, L. Near-threshold RISC-V core with DSP extensions for scalable IoT endpoint devices. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2017, 25, 2700–2713. [Google Scholar] [CrossRef]
- Kulkarni, A.; Page, A.; Attaran, N.; Jafari, A.; Malik, M.; Homayoun, H.; Mohsenin, T. An energy-efficient programmable manycore accelerator for personalized biomedical applications. IEEE Trans. Very Large Scale Integr. (VLSI) Syst. 2018, 26, 96–109. [Google Scholar] [CrossRef]
- Adegbija, T.; Rogacs, A.; Patel, C.; Gordon-Ross, A. Microprocessor optimizations for the Internet of things: A survey. IEEE Trans. Comput.-Aided Design Integr. Circuits Syst. 2018, 37, 7–20. [Google Scholar] [CrossRef]
- Rabaey, J. Low Power Design Essentials; Springer: Berlin/Heidelberg, Germany, 2009. [Google Scholar]
- Myers, J.; Savanth, A.; Howard, D.; Gaddh, R.; Prabhat, P.; Flynn, D. 8.1 An 80 nW retention 11.7 pJ/cycle active subthreshold ARM Cortex-M0+ subsystem in 65 nm CMOS for WSN application. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 22–26 February 2015. [Google Scholar]
- Lim, W.; Lee, I.; Sylvester, D.; Blaauw, D. 8.2 Batteryless Sub-nW Cortex-M0+ processor with dynamic leakage-suppression logic. In Proceedings of the 2015 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 22–26 February 2015. [Google Scholar]
- Pons, M.; Le, T.; Arm, C.; Severac, D.; Nagel, J.; Morgan, M.; Emery, S. Sub-threshold latch-based icyflex2 32-bit processor with wide supply range operation. In Proceedings of the ESSCIRC Conference European Solid-State Circuits Conference, Lausanne, Switzerland, 12–15 September 2016. [Google Scholar]
- Han, J.; Zhang, Y.; Huang, S.; Chen, M.; Zeng, X. An Area-Efficient Error-Resilient Ultralow-Power Subthreshold ECG Processor. IEEE Trans. Circuits Syst. II 2016, 63, 984–988. [Google Scholar] [CrossRef]
- Calhoun, B.; Cao, Y.; Li, X.; Mai, K.; Pileggi, L.; Rutenbar, R.; Shepard, K. Digital Circuit Design Challenges and Opportunities in the Era of Nanoscale CMOS. Proc. IEEE 2008, 96, 343–365. [Google Scholar] [CrossRef]
- Calhoun, B.; Bolus, J.; Khanna, S.; Jurik, A.; Weaver, A.; Blalock, T. Sub-threshold operation and cross-hierarchy design for ultra low power wearable sensors. In Proceedings of the IEEE International Symposium on Circuits and Systems (ISCAS), Taipei, Taiwan, 24–27 May 2009; pp. 1437–1440. [Google Scholar]
- Wang, A.; Calhoun, B.; Chandrakasan, A. Sub-Threshold Design for Ultra-Low-Power Systems; Springer: New York, NY, USA, 2006. [Google Scholar]
- Warneke, B.; Pister, K. An ultra-low energy microcontroller for Smart Dust wireless sensor networks. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 15–19 February 2004; pp. 316–317. [Google Scholar]
- Vittoz, E.; Fellrath, J. CMOS analog integrated circuits based on weak inversion operations. IEEE J. Solid-State Circuits 1977, 12, 224–231. [Google Scholar] [CrossRef]
- Soeleman, H.; Roy, K. Ultra-low power digital subthreshold logic circuits. In Proceedings of the ACM/IEEE International Symposium on Low Power Electronics and Design, San Diego, CA, USA, 16–17 August 1999; pp. 94–96. [Google Scholar]
- Zimmer, B.; Lee, Y.; Puggelli, A.; Kwak, J.; Jevtić, R.; Keller, B.; Bailey, S.; Blagojević, M.; Chiu, P.F.; Le, H.P.; et al. A RISC-V vector processor with simultaneous-switching switched-capacitor DC–DC converters in 28 nm FDSOI. IEEE J. Solid-State Circuits 2016, 51, 930–942. [Google Scholar]
- Keller, B.; Cochet, M.; Zimmer, B.; Kwak, J.; Puggelli, A.; Lee, Y.; Blagojević, M.; Bailey, S.; Chiu, P.F.; Dabbelt, P.; Schmidt, C. A risc-v processor soc with integrated power management at submicrosecond timescales in 28 nm fd-soi. IEEE J. Solid-State Circuits 2017, 52, 1863–1875. [Google Scholar] [CrossRef]
- Bae, W.; Ju, H.; Park, K.; Han, J.; Jeong, D.K. A Supply-Scalable-Serializing Transmitter with Controllable Output Swing and Equalization for Next-Generation Standards. IEEE Trans. Ind. Electron. 2018, 65, 5979–5989. [Google Scholar] [CrossRef]
- Bol, D. Robust and Energy-Efficient Ultra-Low-Voltage Circuit Design under Timing Constraints in 65/45 nm CMOS. J. Low Power Electron. Appl. 2011, 1, 1–19. [Google Scholar] [CrossRef]
- Fisher, S.; Teman, A.; Vaysman, D.; Gertsman, A.; Yadid-Pecht, O.; Fish, A. Digital Subthreshold Logic Design—Motivation and Challenges. In Proceedings of the IEEE 25th Convention of Electrical and Electronics Engineers in Israel, Eilat, Israel, 3–5 December 2008; pp. 702–706. [Google Scholar]
- Patel, H.N.; Calhoun, B.H.; Mann, R.W. Soft errors: Reliability challenges in energy-constrained ULP body sensor networks applications. In Proceedings of the IEEE 23rd International Symposium on On-Line Testing and Robust System Design (IOLTS), Thessaloniki, Greece, 3–5 July 2017; pp. 209–210. [Google Scholar]
- Datta, A.; Ramakrishna, M.; Verma, S.; Joginapally, S. Tutorial T9: Devices and Circuits to Address the Challenges in IOT. In Proceedings of the 30th International Conference on InVLSI Design and 2017 16th IEEE International Conference on Embedded Systems (VLSID), Hyderabad, India, 7–11 Janurary 2017. [Google Scholar]
- Jain, S.; Khare, S.; Yada, S.; Ambili, V.; Salihundam, P.; Ramani, S.; Muthukumar, S. A 280mV-to-1.2V Wide-Operating-Range IA-32 Processor in 32 nm CMOS. In Proceedings of the IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 19–23 February 2012; pp. 66–68. [Google Scholar]
- Beigné, E.; Valentian, A.; Miro-Pamades, I.; Wilson, R.; Flatresse, P.; Abouzeid, F.; Benoist, T.; Bernand, C.; Billoint, O.; Clerc, S.; et al. A 460 MHz at 397 mV, 2.6 GHz at 1.3 V, 32 bits VLIW DSP Embedding FMAX Tracking. IEEE J. Solid State Circuits 2015, 50, 125–136. [Google Scholar] [CrossRef]
- Zangi, U.; Feldman, N.; Shor, J.; Fish, A. 0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC). In Proceedings of the 2017 IEEE S3S Conference, Burlingame, CA, USA, 16–19 October 2017. [Google Scholar]
- Li, B.; Hashimoto, M.; Schlichtmann, U. From Process Variations to Reliability: A Survey of Timing of Digital Circuits in the Nanometer Era. IPSJ Trans. Syst. LSI Design Methodol. 2018, 11, 2–15. [Google Scholar] [CrossRef][Green Version]
- Samal, S.K.; Chen, G.; Lim, S.K. Improving performance under process and voltage variations in near-threshold computing using 3D ICs. ACM J. Emerg. Technol. Comput. Syst. (JETC) 2017, 13, 59. [Google Scholar] [CrossRef]
- Sarfraz, K.; He, J.; Chan, M. A 140-mV Variation-Tolerant Deep Sub-Threshold SRAM in 65-nm CMOS. IEEE J. Solid-State Circuits 2017, 52, 2215–2220. [Google Scholar] [CrossRef]
- Kwong, J.; Ramadass, Y.; Verma, N.; Chandrakasan, A. A 65 nm sub-Vt microcontroller with integrated SRAM and switched capacitor DC-DC converter. IEEE J. Solid-State Circuits 2009, 44, 115–126. [Google Scholar] [CrossRef]
- Sridhara, S.; DiRenzo, M.; Lingam, S.; Lee, S.J.; Blazquez, R.; Maxey, J.; Ghanem, S.; Lee, Y.H.; Abdallah, R.; Singh, P.; et al. Microwatt embedded processor platform for medical system-on-chip applications. In Proceedings of the 2010 IEEE Symposium on VLSI Circuits (VLSIC), Honolulu, HI, USA, 16–18 June 2010; pp. 15–16. [Google Scholar]
- Sadollahi, M.; Hamashita, K.; Sobue, K.; Temes, G.C. An 11-Bit 250-nW 10-kS/s SAR ADC with Doubled Input Range for Biomedical Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2018, 65, 61–73. [Google Scholar] [CrossRef]
- Chen, C.; Chen, L.; Wang, X.; Zhang, F. A 0.6 V, 8.4 uW AFE circuit for biomedical signal recording. Microelectron. J. 2018, 75, 105–112. [Google Scholar] [CrossRef]
- Chen, G.; Fojtik, M.; Kim, D.; Fick, D.; Park, J.; Seok, M.; Chen, M.T.; Foo, Z.; Sylvester, D.; Blaauw, D. Millimeter-scale nearly perpetual sensor system with stacked battery and solar cells. In Proceedings of the 2010 IEEE International Solid-State Circuits Conference, San Francisco, CA, USA, 7–11 February 2010; pp. 288–289. [Google Scholar]
- Zhai, B.; Nazhandali, L.; Olson, J.; Reeves, A.; Minuth, M.; Helfand, R.; Pant, S.; Blaauw, D.; Austin, T. A 2.60 pJ/Inst Subthreshold Sensor Processor for Optimal Energy Efficiency. In Proceedings of the 2006 IEEE Symposium on VLSI Circuits (VLSIC), Honolulu, HI, USA, 15–17 June 2006. [Google Scholar]
- Gao, H.; Matters-Kammerer, M.; Milosevic, D.; Baltus, P.G. Batteryless mm-Wave Wireless Sensors; Springer: Berlin/Heidelberg, Germany, 2018. [Google Scholar]
- Zarate-Roldan, J.; Abuellil, A.; Elsayed, O.; Hussien, F.A.L.; Eladawy, A.; Sánchez-Sinencio, E. 0.2-nJ/b Fast Start-Up Ultralow Power Wireless Transmitter for IoT Applications. IEEE Trans. Microw. Theory Tech. 2018, 66, 259–272. [Google Scholar] [CrossRef]
- Sze, V.; Chandrakasan, A. A 0.4-V UWB baseband processor. In Proceedings of the 2007 ACM/IEEE International Symposium on Low Power Electronics and Design, Portland, OR, USA, 27–29 August 2007; pp. 262–267. [Google Scholar]
- Sze, V.; Finchelstein, D.; Sinangil, M.; Chandrakasan, A. A 0.7-V 1.8-mW H.264/AVC 720p Video Decoder. IEEE J. Solid-State Circuits 2009, 44, 2943–2956. [Google Scholar] [CrossRef]
- Pu, Y.; Pineda de Gyvez, J.; Corporaal, H.; Ha, Y. An Ultra-Low-Energy Multi-Standard JPEG Co-Processor in 65 nm CMOS With Sub/Near Threshold Supply Voltage. IEEE J. Solid-State Circuits 2010, 45, 668–680. [Google Scholar] [CrossRef]
- Hocquet, C.; Kamel, D.; Regazzoni, F.; Legat, J.D.; Flandre, D.; Bol, D.; Standaert, F.-X. Harvesting the potential of nano-CMOS for lightweight cryptography: An ultra-low-voltage 65 nm AES coprocessor for passive RFID tags. J. Cryptogr. Eng. 2011, 1, 79–86. [Google Scholar] [CrossRef]
- Shor, J.; Luria, K. Miniaturized BJT-Based Thermal Sensor for Microprocessors in 32-and 22-nm Technologies. IEEE J. Solid State Circuits 2013, 48, 2860–2867. [Google Scholar] [CrossRef]
- Lyu, T.; Yao, S.; Nie, K.; Xu, J. A 12-Bit High-Speed Column-Parallel Two-Step Single-Slope Analog-to-Digital Converter (ADC) for CMOS Image Sensors. Sensors 2014, 14, 21603–21625. [Google Scholar] [CrossRef] [PubMed]
- Zangi, U.; Feldman, N. In Line Critical Path Delay Measurement for Accurate Timing Indication for a First Fail Mechanism. U.S. Patent 9,882,564, 30 January 2018. [Google Scholar]
- MSP432P401R, MSP432P401M SimpleLink™ Mixed-Signal Microcontrollers. Available online: http://www.ti.com/lit/ds/slas826g/slas826g.pdf (accessed on 6 April 2018).
- Very Low Drop Voltage Regulator with Inhibit Function. Available online: http://www.st.com/resource/en/datasheet/cd00000546.pdf (accessed on 6 April 2018).
- ATSAM ARM-based Flash MCU SAM4L Series. Available online: http://ww1.microchip.com/downloads/en/DeviceDoc/Atmel-42023-ARM-Microcontroller-ATSAM4L-Low-Power-LCD_Datasheet.pdf (accessed on 6 April 2018).
- Apollo Datasheet, Ultra-Low Power MCU Family. Available online: https://www.eembc.org/ulpmark/Apollo_MCU_Data_SheetDS0010V0p90.pdf (accessed on 6 April 2018).


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Chip | MCU | DMIPS/MHz | Current/DMIPS | Optimal Current per MHz on VBAT at 3 V [uj] |
|---|---|---|---|---|
| TI MSP432P401x [48] | 32 bit Cortex M4F | 1.2 | 76.4 | 91.6 uA/MHz |
| STM43L433xx [49] | 32 bit Cortex M4F | 1.2 | 79.2 | 95 uA/MHz |
| ATMEL SAM4L [50] | 32bit Cortex M4F | 1.2 | 147.5 | 177 uA/MHz |
| Ambiq Apollo [51] | 32 bit Cortex M4F | 1.2 | 29.2 | 35 uA/MHz |
| This Work (PLS10) | 32 bit EM5D (equivalent to Cortex M4F) | 1.8 | 10.33 | 18.6 uA/MHz |
| This Work (PLS15) | 32 bit EM5D | 1.8 | 5.55 | 10 uA/MHz |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zangi, U.; Feldman, N.; Hadas, T.; Dayag, N.; Shor, J.; Fish, A. 0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC). J. Low Power Electron. Appl. 2018, 8, 14. https://doi.org/10.3390/jlpea8020014
Zangi U, Feldman N, Hadas T, Dayag N, Shor J, Fish A. 0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC). Journal of Low Power Electronics and Applications. 2018; 8(2):14. https://doi.org/10.3390/jlpea8020014
Chicago/Turabian StyleZangi, Uzi, Neil Feldman, Tzach Hadas, Noga Dayag, Joseph Shor, and Alexander Fish. 2018. "0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC)" Journal of Low Power Electronics and Applications 8, no. 2: 14. https://doi.org/10.3390/jlpea8020014
APA StyleZangi, U., Feldman, N., Hadas, T., Dayag, N., Shor, J., & Fish, A. (2018). 0.45 v and 18 μA/MHz MCU SOC with Advanced Adaptive Dynamic Voltage Control (ADVC). Journal of Low Power Electronics and Applications, 8(2), 14. https://doi.org/10.3390/jlpea8020014