1. Introduction
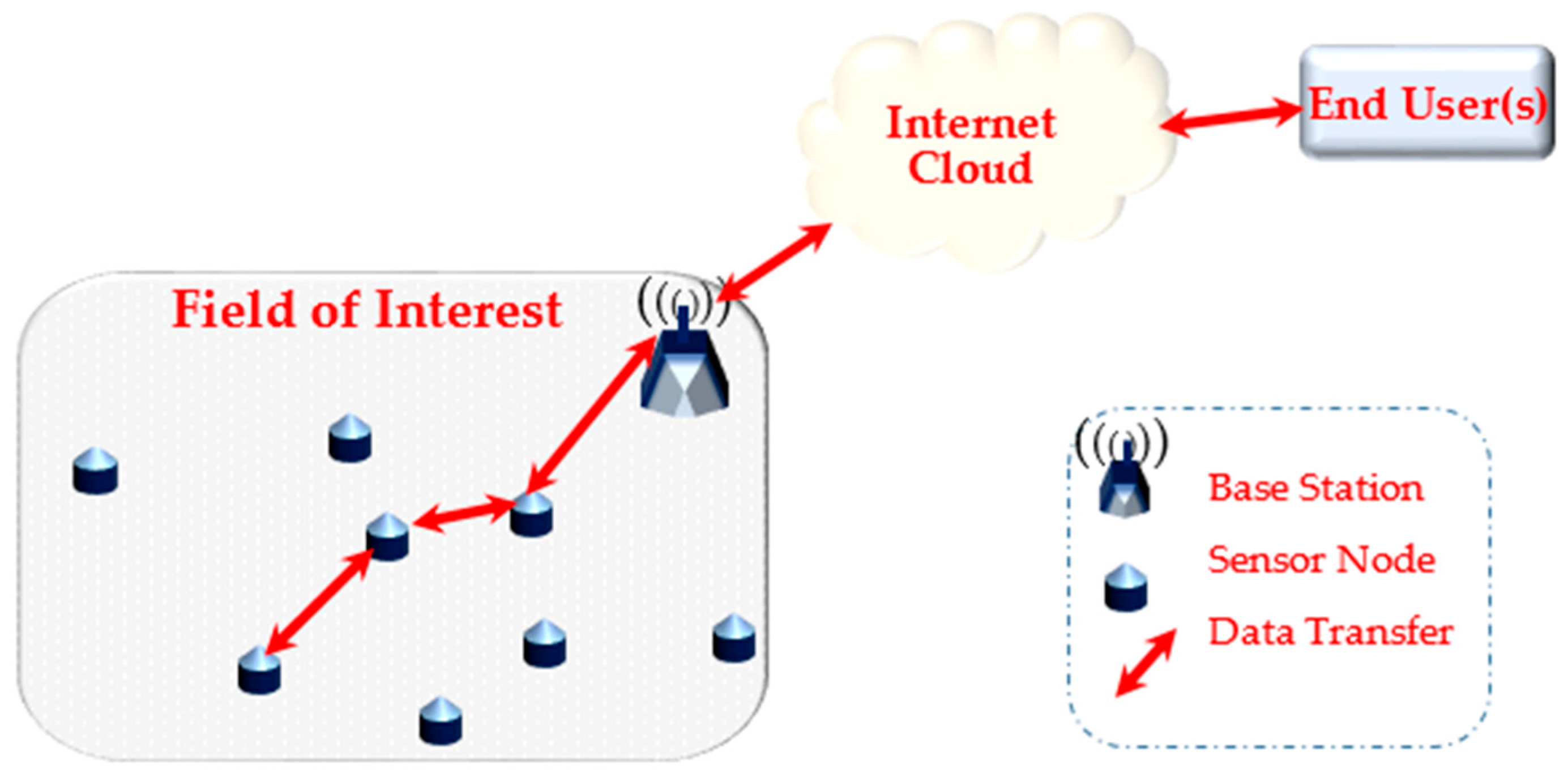
A typical wireless sensor network (WSN) consists of a set of wirelessly interconnected electronic devices, called sensor nodes, along with at least one sink node called base station (BS), which are placed over a given area that is referred as a field of interest (FOI), as illustrated in
Figure 1 [
1,
2,
3].
As depicted in
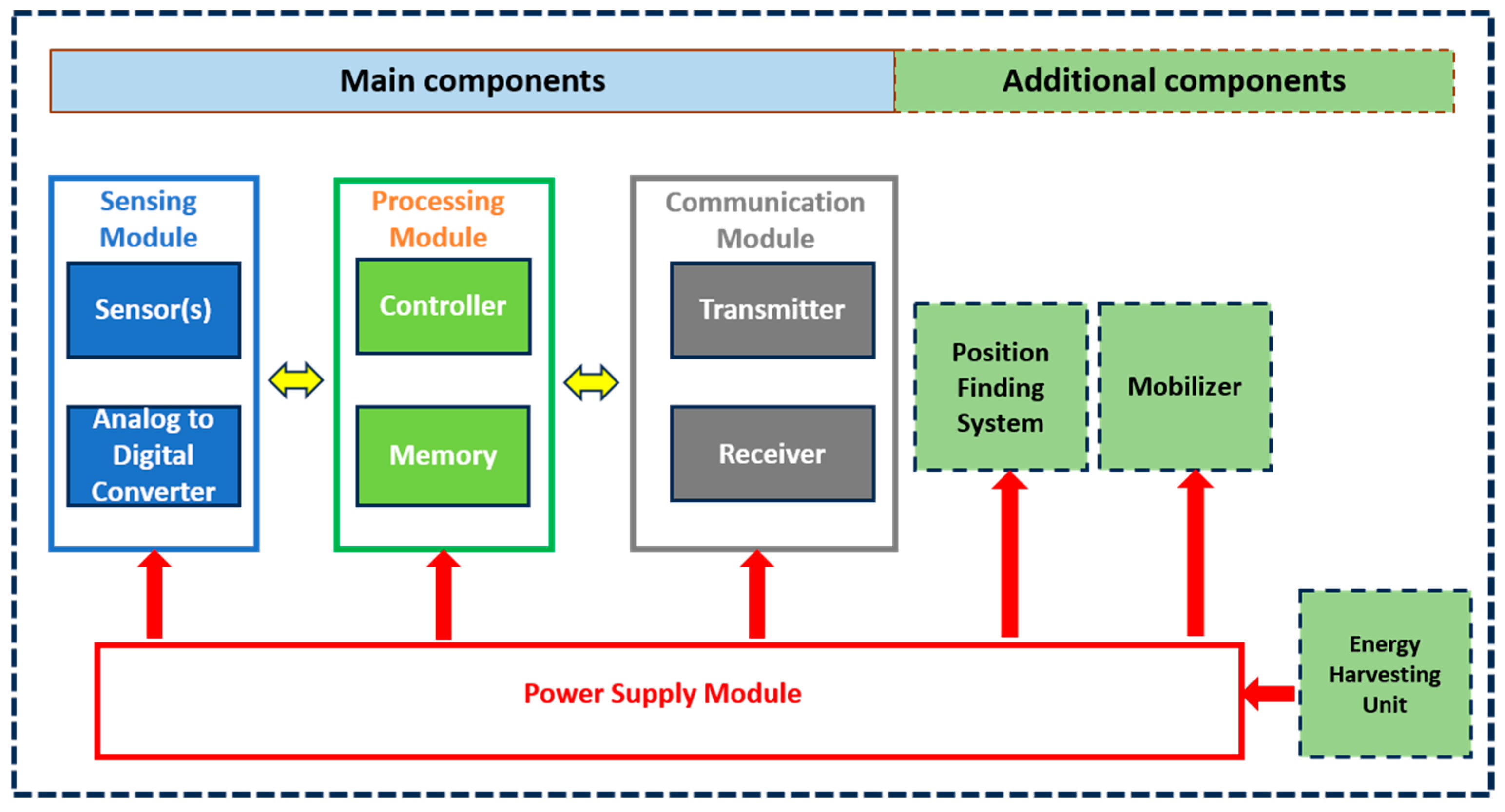
Figure 2, a typical sensor node consists of the following main components:
Sensing module: it contains appropriate sensors that are able to monitor ambient conditions.
Processing module: It typically contains a microcontroller or microprocessor and may also comprise additional memory and processing units. The processing unit plays a critical role in handling the data collected by the sensing unit and controlling the data storage and/or transmission.
Communication module: it is responsible for establishing and maintaining communication between the sensor node and other sensor nodes and/or a BS.
Power supply module: This module refers to the energy source that provides the necessary electrical power to the sensor node. Since sensor nodes in WSNs are often deployed in remote or generally difficult to approach locations, they must rely on self-contained power sources. Typically, this component is a battery. A sensor node may also contain a position finding system and an energy harvesting unit. Furthermore, it may be mobile thanks to the use of an appropriate motion mechanism or system.
WSNs, taking advantage of the collaborative use of the sensing, processing, and communication abilities of their sensor nodes and the BS, are able to monitor ambient conditions in any kind of FOIs. This is why, WSNs, although initially invented exclusively for military use, are nowadays the basis for the Internet of Things (IoT) and have an ever-increasing variety of applications [
4]. Particularly, in the urban sector, WSNs serve various applications concerning smart homes, smart cities, security and surveillance, transportation, and building health monitoring [
5,
6,
7,
8,
9]. In flora and fauna, greenhouse monitoring, crop monitoring, and livestock farming enjoy the benefits of the usage of WSNs [
10,
11]. Likewise, WSNs are applied in healthcare applications, such as patient monitoring and home assisting systems [
12,
13]. In industry, WSNs are used in machinery health monitoring, robotics, and logistics [
14,
15,
16]. WSNs are also used in environmental applications, such as air monitoring [
17]. Battlefield surveillance, combat monitoring, and intruder detection are the main military applications of WSNs [
18].
On the other hand, the operation of WSNs is obstructed due to certain limitations of their sensor nodes, the inherent weaknesses of wireless communications, and other application-related problems, concerning congestion, connectivity, coverage, security, quality of service, etc., thus posing numerous challenges and optimization needs [
19,
20]. However, the particularly constrained energy adequacy of the sensor nodes is by far the most important among all weaknesses that obstruct the operation of WSNs. Actually, energy scarcity is caused by the fact that, in most WSNs, the sensor nodes are powered by batteries that are difficult or even impossible to either recharge or replace. In a WSN, the energy insufficiency of its nodes is a mostly severe concern, because it may result to the rapid cessation of their operation and, thus, the gradual failure of communications within the network until the overall WSN collapses. This is why the enhancement of the energy sustainability of WSNs is necessitated [
21].
In order to extend the lifetime of sensor nodes, the elimination of the energy waste that is caused by various phenomena, such as idle listening, overhearing, packet collision, interference, control packet overhead, and over-emitting, is necessitated [
22]. Actually, there are numerous hardware-based and algorithm-based methods that pursue energy sustainability of WSNs via not only energy saving but also energy harvesting or even wireless energy transfer [
21,
22,
23,
24,
25,
26,
27,
28]. Among them, the use of routing protocols that are energy-efficient has proven to be a widely used energy saving method, because sensor nodes consume most of their residual energy when they transmit and route data. According to their organizational or operational features, the energy-efficient routing protocols are classified into four main categories, namely, the communication model, network structure, topology, and reliable routing, as well as various subcategories [
29]. Specifically, protocols belonging to the network structure category are classified as either flat or hierarchical [
29,
30]. Flat protocols consider all network nodes as being equal entities that have unique global addresses. These protocols perform well in WSNs that comprise of a few sensor nodes and, thus, have extremely low scalability. On the other hand, in hierarchical protocols, which are further classified as hierarchy-based, zone-based, or fuzzy logic-based, sensor nodes are treated according to the place they hold within the hierarchical architecture of the network. Specifically, all network nodes are distributed in individual groups, called clusters, each of which has one cluster head and a number of cluster nodes. Hierarchical protocols are generally considered to be the most popular among all types of energy-efficient routing protocols, because they enable data aggregation, reduce the communication overhead, and achieve great scalability. For these reasons, hierarchical protocols are ideal for large-scale WSNs that have heavy communication load and cover wide FOIs [
31]. The formation and composition of clusters and the selection of cluster heads are common challenges for protocols of this kind [
29].
This article focuses on hierarchical, energy-efficient routing protocols and, particularly, on hierarchy-based protocols that are based on LEACH, which is considered to be the forerunner protocol of this type of protocols. In
Section 2, LEACH is studied. In
Section 3, some of the most well-known descendants of LEACH protocols, T-LEACH included, are investigated. In
Section 4, a novel protocol of this kind, named T-LEACH
SAS, is introduced. In
Section 5, the performance of T-LEACH
SAS is compared to T-LEACH via simulation tests. Finally, in
Section 6, concluding remarks are presented.
2. LEACH Protocol
Low-energy adaptive clustering hierarchy (LEACH) [
32] is one of the first and most well-known hierarchical protocols. Its main objective is to extend the lifetime of the sensor nodes that are disseminated within clusters in WSNs. Specifically, given that, within every cluster, the cluster head consumes much more energy than the other cluster nodes, LEACH aims to perform the selection of the cluster heads among the cluster nodes evenly.
LEACH adopts a two-phase cycle consisting of the setup phase and the steady-state phase in order to achieve efficient distribution and the coordination of the cluster sensor nodes in a WSN. In the setup phase, the key goals are the creation of clusters, the selection of the cluster heads, and the creation of a TDMA (time division multiple access) schedule for the communication of the cluster head with its cluster nodes. Within every cluster, all nodes participate in a procedure to elect the appropriate cluster head. This procedure is initiated by generating a random priority value ranging from 0 to 1. If this value does not exceed the randomly generated number
T(
n), the node is selected to be the cluster head. The value of
T(
n) is calculated via the following formula:
where
P denotes the percentage of the cluster nodes to become cluster heads,
r represents the number of current round, and
G stands for the total number of the cluster nodes that have not been elected as cluster heads during the 1/
P previous rounds. According to this formula, once a node has been elected as a cluster head in a given round, it cannot be selected as a cluster head again in the subsequent 1/
P rounds. This technique ensures an equitable selection of cluster heads and a better uniform distribution of energy consumption for the network nodes. The ideal proportion of cluster heads has been experimentally found to be equal to 5%. Whenever a node becomes a cluster head, it transmits an advertising (ADV) message to the rest of the nodes in the network. Each node that receives this message and wants to participate in the specific cluster sends a replying (RPL) message back to the designated cluster head. This sequence of actions results in the establishment of clusters with their respective cluster heads. The cluster head then proceeds to create a TDMA schedule, which is subsequently shared with the nodes that are members of its cluster. This TDMA schedule determines the specific time that each node is both prompted and allowed to transmit data. As soon as the TDMA schedule has been defined, the setup phase is finalized.
During the steady-state phase, data propagation occurs among nodes and their respective cluster heads, as well as amid cluster heads and the base station. The nodes send their data to the relative cluster heads based on the designated timeslots specified in the TDMA schedule. During the time slot of every node, all of the rest nodes that belong to the same cluster reduce their energy consumption by being inserted into a low-power state. This approach not only effectively prevents congestion but also conserves the energy stored in the nodes’ batteries. After the cluster head has gathered the data from its cluster nodes, it utilizes the TDMA schedule to send these aggregated data to the base station, ensuring efficient data transmission.
As highlighted earlier, LEACH effectively balances the cluster head election process across network nodes, thereby extending the overall network lifespan. Notably, it does so without necessitating global network knowledge. Additionally, by enabling a TDMA schedule, the network avoids data collisions during transmissions, enhancing network efficiency. However, it is worth noting that LEACH does not consider the remaining energy levels of nodes when electing cluster heads. Consequently, nodes with low energy reserves have the same probability of becoming cluster heads as those with ample energy. Also, in LEACH, clustering is random and consequently unbalanced, because not only the number but also the position and the formation of clusters are unsystematic. Moreover, LEACH may not be suitable for networks deployed in wide areas due to its reliance on single-hop routing, which is impractical for large-scale WSNs. Furthermore, the dynamic clustering approach is associated with higher overhead.
3. LEACH-Based Energy-Efficient Routing Protocols
It is noteworthy that, although LEACH was introduced in the beginning of 21st century, numerous energy-efficient protocols keep on being proposed every year since then, as modifications and optimizations of LEACH [
29,
33,
34,
35,
36,
37,
38,
39]. Many of these LEACH descendants have proven to enhance the operation of their predecessor. Yet, these protocols have different pros and cons when compared in terms of not only their energy efficiency but also many other features, such as scalability, overhead, load balance, latency, complexity, cluster formation, location information, fault tolerance modulation techniques, communication model, and channel encoding [
31]. Also, in order to perform the communication among each cluster head and the base station, some of these protocols utilize single-hop routing, while other ones use the multi-hop routing, which is necessitated in large-scale WSNs. Consequently, based on the above considerations, it is obvious that the selection of the most suitable hierarchical routing protocol is application-dependent. In what follows in this section, various descending protocols of LEACH are indicatively referred to as examples of reference.
Threshold LEACH (T-LEACH) [
40] is a single-hop routing protocol. Similarly to LEACH, T-LEACH also strives to extend the lifetime of a WSN by decreasing the energy consumption that is associated with data transmission and aggregation. Yet, contrary to LEACH, where cluster heads are selected according to a specific probability in each round, in T-LEACH, new cluster heads are selected only when the residual energy of the existing cluster heads becomes lower than a specific energy threshold, which is dynamically calculated based on various network parameters. In this way, in T-LEACH, the frequency of cluster head changes is reduced. Consequently, the transmission of advertisement messages, which takes places among the cluster head and its cluster nodes every time that a new cluster head is selected, becomes less frequent too. The reduction in data transmissions results to corresponding energy saving. Indeed, it has experimentally been demonstrated that T-LEACH achieves higher energy efficiency than LEACH. On the other hand, the configuration and utilization of the appropriate threshold value can be challenging, and it may be associated with additional communication overhead.
LEACH balanced (LEACH-B) [
41] is a single-hop routing protocol. It aims to balance the formation of clusters by taking into consideration both the residual energy of the sensor nodes and the desired proportion of cluster heads in the whole network. The total number of cluster heads is defined by the product
n ∙
p, where
n represents the total number of network nodes, and
p symbolizes the desired percentage of the cluster heads. The first cluster heads are selected randomly by a procedure similar to that adopted by LEACH. All cluster heads are sorted according to their residual energy. If the number of the randomly nominated cluster heads is lower than the product
n ∙
p, then some normal network nodes are selected as cluster heads. If this number is larger than the product
n ∙
p, then cluster heads with lower energy are one by one converted to normal network nodes until the number of cluster heads becomes equal to the product
n ∙
p. LEACH-B achieves energy balance in cluster head selection and cluster formation. Yet, it suffers from high complexity, high overhead, and low scalability.
Centralized LEACH (LEACH-C) [
42] is a single-hop routing protocol. It has a steady phase, which is like that in LEACH, and a setup phase, which differs from that of LEACH, since the cluster heads are selected by the base station. Specifically, all nodes report to the base station both their location and the quantity of their residual energy. In this way, the base station acquires global knowledge of the status of its network nodes and processes the relative information, in order to create clusters that consume less energy during transmission. The base station calculates the average residual energy of the nodes and extracts from the list those that are eligible to become cluster heads during the specific round the nodes whose remaining energy is less than the average energy. Upon the formation of clusters and the selection of cluster heads, the base station broadcasts the identities of the cluster heads that have been selected. LEACH-C performs better than LEACH in terms of cluster formation and energy efficiency. However, not only does it require the knowledge of the position of each node, but also, it is associated with the problem of the early death of cluster heads with low energy, since it does not guarantee that the nodes with the highest energy reserves are selected as cluster heads.
LEACH-CE (LEACH centralized efficient) [
43] is another single-hop routing protocol. Actually, it is an improved version of LEACH-C in the sense that it eradicates the main disadvantage of LEACH-C, i.e., the early deaths of the cluster heads. Practically, LEACH-CE follows the same process as in LEACH-C but only during the first round, until the clustering is completed. Next, the base station defines every cluster node with the highest residual energy among the cluster nodes as a cluster head.
LEACH-D [
44] is a multi-hop routing protocol. In this protocol, the selection of the cluster heads is performed by considering the density distribution of the nodes along with their residual energy. Specifically, the nodes that have high priority in being selected as cluster heads are those that have high energy residues and are located in high-density areas. During the clustering phase, each cluster head node decides what the radius of its own cluster will be according to its distance from the base station and the degree of connectivity. The nodes that have not been selected as cluster heads select the proper cluster to join by taking into account their distance to the neighboring cluster heads and the residual energy of these cluster heads. Finally, the cluster heads transmit their data to the base station via multi-hop communication. LEACH-D performs fine regarding energy efficiency and scalability. Yet, it is associated with high complexity and overhead.
In LEACH-L [
45], which is a multi-hop routing protocol, the cluster heads that are located close to the base station constitute the group of nodes that transmit their data directly to the base station. Every cluster head that does not belong to this group, because it is positioned far away from the base station, transmits its data to the base station via one relay node belonging to the aforementioned group. The selection of the most appropriate relay node is based on its residual energy and its distance from the base station. LEACH-L achieves remarkable energy saving, especially in large-scale WSNs, in which the base station is located at a distant position. On the other hand, the requirement of location knowledge is associated with higher communication load and complexity.
In two levels LEACH (TL-LEACH) [
46], which is a multi-hop routing protocol, a two-level hierarchy is adopted. Specifically, the cluster heads located close to the base station are characterized as primary, while cluster heads located away from the base station are characterized as secondary. The secondary cluster heads perform the aggregation and partial local processing of the data received by their cluster nodes and transmit the resultant data to the primary cluster heads. The primary cluster heads carry out the complete local computation of the data that they receive from both their cluster nodes and the secondary cluster heads and transmit the corresponding data directly to the base station. The advantage of this two-level hierarchy is that the majority of data transmissions is performed over short distances, and consequently, nodes consume less energy during transmissions and, therefore, achieve longer lifetime. The disadvantage of this hierarchy is that the primary cluster heads are associated with a heavier communication load and, consequently, become depleted faster than the secondary cluster heads.
Improved LEACH (I-LEACH) [
47] aims at achieving high energy efficiency in both cluster formation and cluster head selection. Specifically, the optimal number of clusters is found based on the locations of nodes and the base station. Additionally, during cluster head election, an appropriate threshold used considers for every node its residual energy, the number of its neighboring nodes, and its distance from the base station. According to the value of this threshold, a node is preferred to be elected as a cluster head when it has many neighbors, the residual energy is greater than the average energy of the network nodes, and it is located closer to the base station. I-LEACH achieves network stability and energy efficiency. On the other hand, it does not have a mechanism for data aggregation.
The equalized cluster head election routing protocol (ECHERP) [
48] performs cluster head selection based on the Gaussian elimination algorithm. Specifically, the specific algorithm is used in order to compute the energy outflow that every node is going to have if it is a cluster head during the next round for all possible node combinations. Eventually, ECHERP selects the arrangement of cluster heads that minimizes the overall consumption of energy. ECHERP performs well in terms of energy efficiency and scalability. Nevertheless, it does not take into consideration metrics related to QoS and time constraints.
Enhanced heterogeneous LEACH (EHE-LEACH) [
49] pursues energy efficiency based on the use of a distance threshold. Specifically, nodes whose distance from the base station is below the value of the specific distance threshold, i.e., nodes positioned nearby the base stations, do not form clusters. Instead, they communicate directly with the base station. All other nodes, which are located in more distant positions, are grouped in clusters. Within each one of these clusters, there are some advanced nodes, which have higher energy reservoirs than the rest cluster nodes. EHE-LEACH provides advanced nodes with higher probability of being elected as cluster heads and, subsequently, extends the network lifetime. However, non-clustered nodes do not adopt any sleep–awake scheduling and, consequently, have relatively high energy consumption.
LEACH expected residual energy (LEACH-ERE) [
50] makes use of the so-called expected residual energy (ERE) value, which represents for every single node its anticipated residual energy in case that node is elected as a cluster head. Specifically, the cluster heads are elected at the end of every round by making use of both a predefined threshold, which expresses the percentage of the tentative nodes, and a function that generates a random number between 0 and 1. The cluster nodes that are associated with greater generated numbers of the threshold become cluster heads and calculate the probability, utilizing a fuzzy inference system, with inputs the residual energy and the ERE value. A bigger probability results in a higher possibility of being elected as a cluster head. LEACH-ERE achieves stable performance. On the other hand, it provides no consideration of distance to the BS, resulting in the early death of faraway nodes.
Orphan LEACH (O-LEACH) [
51], which is a single-hop routing protocol, introduced the concept of orphan nodes that characterizes the nodes that have not been assigned to any cluster head. O-LEACH proposes two different schemes. In the first of them, orphan nodes transmit the data they sense to adjacent nodes, which, operating as gateways, aggregate and forward these data to the base station. In the second scheme, sensor nodes lying in an uncovered area of the network compose a subcluster and choose a cluster head based on the shortest distance from the gateways. The orphan node that is located closer to the gateway is selected to be the cluster head. O-LEACH is evinced to outperform LEACH in terms of energy efficiency, scalability, connectivity, and convergence. However, it suffers because of the rapid energy drainage of the nodes that are positioned far away from the base station, as a consequence of single-hop routing.
In quadrature LEACH (Q-LEACH) [
52] the field of interest is divided into four quadrants based on information location of networks nodes, so that cluster balancing is achieved. Every node randomly picks a number between 0 and 1, while in each one of the four quadrants, a threshold between 0 and 1 is set. If both the random number picked by a node is less than the threshold of the network quadrant it belongs tο and the predefined number of cluster heads for this quadrant has not been filled, then this node turns into a cluster head and broadcasts the corresponding pieces of information to the network. Based on the received signal strength indicator (RSSI) of these broadcast messages, each one of the rest network nodes decides the cluster head within their quadrant to be associated with and communicates with this cluster head during its own TDMA slot. In Q-LEACH, cluster head election is energy-efficient, and the overall network lifetime is extended comparatively to LEACH. Nevertheless, it is associated with a higher probability of energy hole creation.
In multi-hop routing LEACH (MR-LEACH) [
53], the field of interest is divided into different levels, according to the number of hops needed to reach the base station. Each one of these levels includes its own clusters, while all clusters have the same size. In each one of these layers, the cluster heads collaborate with cluster heads of their adjacent layer. Specifically, the data that are aggregated from the more distant clusters are transmitted to the base station by multi-hop routes via the cluster heads of layers being located nearer to the base station. Nodes having greater energy residues are selected to be cluster heads, while the rest nodes choose their own cluster head based on RSSI. The communication among the base station and the cluster heads is performed by using an appropriate TDMA schedule. The use of multi-hop paths in MR-LEACH achieves high energy efficiency. On the other hand, the rapid energy drainage of the nodes close to the base station is the main disadvantage of this protocol.
4. Threshold LEACH with Sleep–Awake Scheduling Protocol
As aforementioned in
Section 3, T-LEACH protocol achieves high energy savings by the usage of a specific energy threshold, which accordingly reduces the frequency of cluster head changes. For this reason, this protocol is considered to be one of the most cited descendants of LEACH. In this article, T-LEACH with sleep–awake scheduling (T-LEACH
SAS) is introduced as a hierarchical protocol for energy-efficient routing in WSNs, which further enhances the performance of T-LEACH. In what follows in this section, the establishment of the theoretical background of T-LEACH
SAS takes place, followed by an overview regarding first its operation and next its architecture.
4.1. Theoretical Background
T-LEACHSAS is proposed as an enhanced extension of T-LEACH, in the sense that the incorporation of a sleep–awake mechanism provides additional energy conservation and, consequently, extends the network lifetime in WSNs.
Actually, sleep–awake scheduling is just one among plenty of mechanisms that have been proposed in order to achieve energy conservation in WSNs. Specifically, the protocols that pursue the conservation of sensor nodes’ energy in WSNs can be classified into three main categories, which are data-driven, duty-cycling, and energy-efficient routing, along with various subcategories [
21,
26,
27,
28]. While data-driven approaches aim to limit the amount of sampled data, and energy-efficient routing protocols aim to reduce the amounts of energy consumption during data transmission, duty-cycling schemes pursue energy saving by managing the activity status of the communication module of the sensor nodes. Duty cycling is based on either topology control, sleep–awake scheduling, or the MAC protocol.
Particularly, sleep–awake scheduling algorithms regulate the operational state of sensor nodes between the awake mode and the sleep mode, in order to minimize energy consumption, while maintaining the appropriate network performance. In awake mode, sensor nodes keep active of all their components in order to sense ambient conditions, process the relative data, and communicate with other network nodes or/and the base station. In the sleep state, nodes deactivate most of their components, their radios included, in order to save energy when there is not any need to either sense ambient conditions or process data or communicate. The schedule used in order to switch between sleep and awake modes can be of various types (e.g., deterministic, randomized, event-driven etc.). Additionally, sleep–awake scheduling can be either centralized or distributed. In centralized sleep–awake scheduling, the base station performs global control of the scheduling processes for all network nodes. In this way, better scheduling performance can be achieved. However, global knowledge of the overall network is needed, and consequently, both processing and communication are associated with high complexity and overhead. On the other hand, in distributed sleep–awake scheduling, specific sensor nodes need only local information in order to regulate the operational state of themselves and their neighboring nodes between the awake mode and the sleep mode. Thus, such schemes are easier to implement. Yet, the achievement of optimal results is inevitably more difficult [
54].
Based on the above analysis, it becomes evident that T-LEACHSAS aims to combine the benefits of energy-efficient routing, along with those provided by duty cycling via a centralized sleep–awake scheme. On the other hand, it is associated with higher complexity.
4.2. Overview of T-LEACHSAS Operation
T-LEACH
SAS protocol aims to achieve energy conservation in both the selection of cluster heads and the operation of non-cluster head nodes. In order to do so, it combines an energy threshold-based approach for the selection of cluster heads along with a sleep–awake scheduling mechanism that pursues the management of the energy states of sensor nodes. Specifically, in the T-LEACH
SAS protocol, following [
34], as long as the residual energy of an existing cluster head exceeds the value of a predefined threshold, this node remains as a cluster head. A new round for the election of a different cluster head is initiated as soon as the remaining energy of an existing cluster head becomes less than this threshold.
At the same time, T-LEACH
SAS adopts the usage of sleep–awake scheduling, which is a well-known energy management technique employed in WSNs [
21,
26,
27,
28,
54,
55], where nodes periodically alternate between active (awake) and inactive (sleep) states. The nodes during the awake periods perform sensing, data transmission, and other tasks before returning to a low-power sleep mode, while in sleep mode, the nodes skip the rest of the processing for that round, conserving energy.
Practically, in T-LEACHSAS, a scheduler assigns specific time slots for when nodes should be awake and when they should sleep. This can be on a periodic basis, in order to let a node be awake for certain duration and sleep for all the rest time. This scheduling strategy plays a critical role in conserving energy and extending network longevity.
The operation of T-LEACH
SAS is performed in two phases, which are the setup phase and the steady-state phase. Specifically, as soon as the operation of T-LEACH
SAS begins, the setup phase is initiated. During the setup phase, the formation of clusters takes place. At the same time, each sensor node decides whether to become a cluster head or not, based on a probability model that considers the node’s residual energy and the desired percentage of cluster heads within the overall network. This strategy aims to perform the rotation of cluster heads in a way that distributes energy consumption evenly across the network nodes. Each new cluster head broadcasts its status to other nodes in an advertisement message, which includes its identity and possibly its location (if this is known). Each node in the network that is not selected to be a cluster head receives these advertisements, chooses which cluster to join, and then, notifies its decision to the corresponding cluster head. In this way, each cluster head forms its own cluster. Following cluster formation, each cluster head creates a TDMA schedule, which is crucial for the sleep–awake mechanism. Actually, a model based on the sleep mode TDMA scheduling approach presented in [
56] is used. In this approach, the nodes rely on internal low-power timers that remain active during sleep mode. Specifically, nodes follow a predefined schedule, which indicates the time to wake up to transmit or listen. Additionally, nodes along a path can be alerted on-demand by short wake-up messages in order to make possible unscheduled immediate wake-ups. Initial synchronization is accomplished when the central gateway floods the schedule to all nodes, and afterwards, timing is maintained independently in each node by means of their internal timers without a continuous synchronization requirement. This approach reduces idle listening, conserves energy, and keeps delays minimal. This schedule assigns each member node a specific time slot for transmission, allowing them to know when to be awake for transmitting data and when they can turn off their radio components to save energy. Finally, cluster heads broadcast this schedule to their cluster members. As soon as the setup phase is completed, the steady-state is initiated.
For the period of the steady-state phase, sensor nodes monitor their ambient conditions. During their allocated time slots, and if the value of sensed data exceeds a predefined threshold, the sensor nodes wake up, transmit their data to their cluster head, and then, go back to sleep. Otherwise, if the value of sensed data does not exceed the specific threshold, the nodes stay asleep. During each round, the cluster heads collect the data that have been transmitted to them from their cluster members, perform data aggregation to remove redundancies, and then, transmit the aggregated data to the base station, further reducing energy consumption and enhancing data transmission efficiency. Nodes and cluster heads update their energy levels after each round, and if any node depletes its energy, it is identified as a dead node and is, henceforth, excluded from any participation in the overall protocol operation during all future rounds. This continuous monitoring and adaptation of energy usage, coupled with threshold-based data transmission and sleep–awake scheduling, significantly enhance the network’s overall energy efficiency and prolong its operational life.
4.3. Overview of T-LEACHSAS Architecture
The aforementioned operation of the T-LEACHSAS protocol is based on the combined use of eight distinct processes, which are described, as follows:
At deployment, each sensor node is initialized with a fixed initial energy quota. Cluster heads are determined dynamically by using energy thresholds. Each cluster head remains active, as long as its residual energy stays above a certain threshold. When energy levels fall below this threshold, the cluster initiates a cluster head re-election process, thereby reducing overhead associated with frequent cluster head rotation.
Each cluster head computes a TDMA schedule to organize intra-cluster communication. The schedule assigns time slots to each cluster node in order to transmit sensed data. In order to achieve synchronization and coordination, the schedule is calculated at the beginning of each operational round and is broadcasted by the cluster heads to their respective cluster members.
Each node operates using low-power internal hardware timers, which remain active during sleep periods to accurately maintain synchronization with the TDMA schedule. After receiving their assigned timeslots, non-cluster head nodes enter sleep mode, significantly reducing idle listening energy dissipation. Low-power timers, active during these sleep intervals, trigger nodes to transition back to an awake state just before their TDMA slot, ensuring the timing of data transmission without unnecessary energy loss. This method maintains synchronization across the network efficiently and also dramatically reduces the nodes’ idle listening time, thus conserving significant amounts of energy.
Nodes periodically wake up according to their TDMA schedule and sense the environment. Each node implements a threshold-based sensing approach to decide on whether the sensed data require transmission. The logic is as follows: If the measured value exceeds a predefined threshold, the node proceeds to transmit its data in its TDMA slot. If the sensed value is below the threshold, the node skips the transmission step and immediately returns to sleep mode, thus avoiding unnecessary energy expenditure. This threshold-based sensing mechanism minimizes the number of transmissions, thus enhancing energy conservation. A pipeline wake-up mechanism is also implemented, where a node that has urgent data (beyond the threshold) can send a wake-up signal ahead of its regular slot, prompting the wake-up of intermediate nodes along the path towards the cluster head and, ultimately, to the base station, without waiting for the next full TDMA cycle.
Cluster heads aggregate incoming data from their member nodes. Data aggregation is carried out locally within cluster heads, performing statistical methods (such as averaging, maximum/minimum detection, or more complex aggregation algorithms if required). This aggregation step reduces the quantity of transmitted data and minimizes the energy expended on longer-distance transmissions to the base station.
Cluster heads and member nodes monitor and update their residual energy levels. Using this information, cluster heads inform their suitability as heads. Nodes whose energy falls below a certain threshold are labeled “dead nodes” and stop participating in the network operations.
Although the use of internal low-power hardware timers minimizes the need for timer recalibration to counteract potential clock drift, T-LEACHSAS in prolonged operation periodically recalibrates the nodes’ clocks. This periodic recalibration, together with the initial TDMA schedule distribution from the cluster heads, ensures the synchronization of the nodes. Additionally, nodes receiving wake-up signals perform local synchronization updates, ensuring consistent timing alignment across the network.
Nodes report their operational status and residual energy levels to cluster heads during routine transmissions. Cluster heads use these report data to track node health. Nodes approaching energy depletion notify the network in order to enable cluster restructuring or head re-election ahead of node failures. This method of proactive maintenance reduces disruptions due to unexpected node outages and enhances overall network robustness and reliability.
5. Comparative Performance Evaluation
With the intention of appraising the energy efficiency of T-LEACH
SAS, its performance was comparatively evaluated against that of T-LEACH and LEACH. Actually, there are certain reasons that justify the selection of the specific protocols to compare their performance with that of T-LEACH
SAS. Specifically, LEACH is not only the ancestor of all protocols that perform hierarchical, energy-efficient routing in WSNs, but it also keeps on being the standard of comparison for all new protocols of this kind throughout time [
34,
35,
36,
57]. Additionally, T-LEACH, while it keeps on being referred to as achieving higher energy efficiency than LEACH [
35,
57], is also the protocol that has the most similarities with T-LEACH
SAS than any other hierarchical, energy-efficient protocol.
5.1. Overview of the Simulation Model
In the simulation tests performed in MathWorks MATLAB (version R2023b), it was supposed that a specific number of sensor nodes having the same amounts of initial residual energy are distributed within a square field of interest, while the WSN also includes one base station that receives the data sent by the sensor nodes.
The channel/radio energy model used implements the classical first-order radio model used in LEACH-like protocols:
According to the radio model adopted, there is an energy loss proportional to d2 corresponding to the free-space model and an energy loss proportional to d4 corresponding to the multi-path model. Where ETx(k,d) is the energy dissipated by a sensor node for the radio transmission over a distance d of a message containing k bits, ETx-elec is the transmitter circuitry dissipation, is the free-space amplifier energy coefficient, and is the multi-path amplifier energy coefficient.
Likewise, the energy
ERx(
k) consumed by a node for the reception of a message containing k bits is expressed by:
where
ERx-elec symbolizes the receiver circuitry dissipation. Additionally, it is assumed that a node dissipates additional amounts of energy, equal to
Eelec, while being in an idle state and equal to 0.1·
Eelec while sensing. It is supposed that every node is able to monitor its remaining energy. It is also assumed that the radio channel is symmetrical, i.e., the energy dissipation for the transmission of a message from a source node to a destination node is equal to that for the transmission of the same message from the destination node back to the source node for a given signal-to-noise ratio.
Also, T-LEACHSAS, similarly to other LEACH-based protocols, relies on round-based synchronization and TDMA scheduling. The timing constraints related to synchronization in communications have been heuristically defined, so that nodes synchronize their clocks to ensure seamless message forwarding and achieve successful rendezvous regarding their communication. Additionally, as abovementioned, sleep–awake scheduling, which reduces idle listening energy dissipation, has been used, while sleep–awake times depend on each node’s assigned slot. Regarding the sleep-wake strategy adopted, a wake interval has been heuristically defined, in order to determine how often each network should switch from sleep mode to active mode in order to participate in the communication and processing activities. Every node checks whether the current round is a multiple of the wake interval. If not, this node remains on a sleep state, meaning that it saves energy by avoiding communication and other energy consuming activities. Otherwise, the node enters an awake state, i.e., it is able to participate in both communication and any other of its activities. As regards the handover of energy status, the overhead beyond standard data transmissions for energy messaging is considerably low. Moreover, T-LEACHSAS, similarly to LEACH and T LEACH, does not explicitly handle the case of insufficient energy for reliable transmission. Practically, a node attempts data transmission even if its residual energy is inadequate, until it runs out of energy.
5.2. Presentation and Evaluation of Simulation Tests
In what follows in this section, the simulation tests conducted are described, while the results of these tests are both presented and discussed. Totally, five simulation scenarios were examined. The metrics evaluated in all of them are the number of sensor nodes remaining alive and the total number of data bits that are transmitted by the network nodes to the base station per simulation round. The parameters whose values remained unchanged in all scenarios examined are presented in
Table 1, along with their corresponding values.
Likewise, the parameters whose values varied in these scenarios examined are presented in
Table 2 along with their corresponding values.
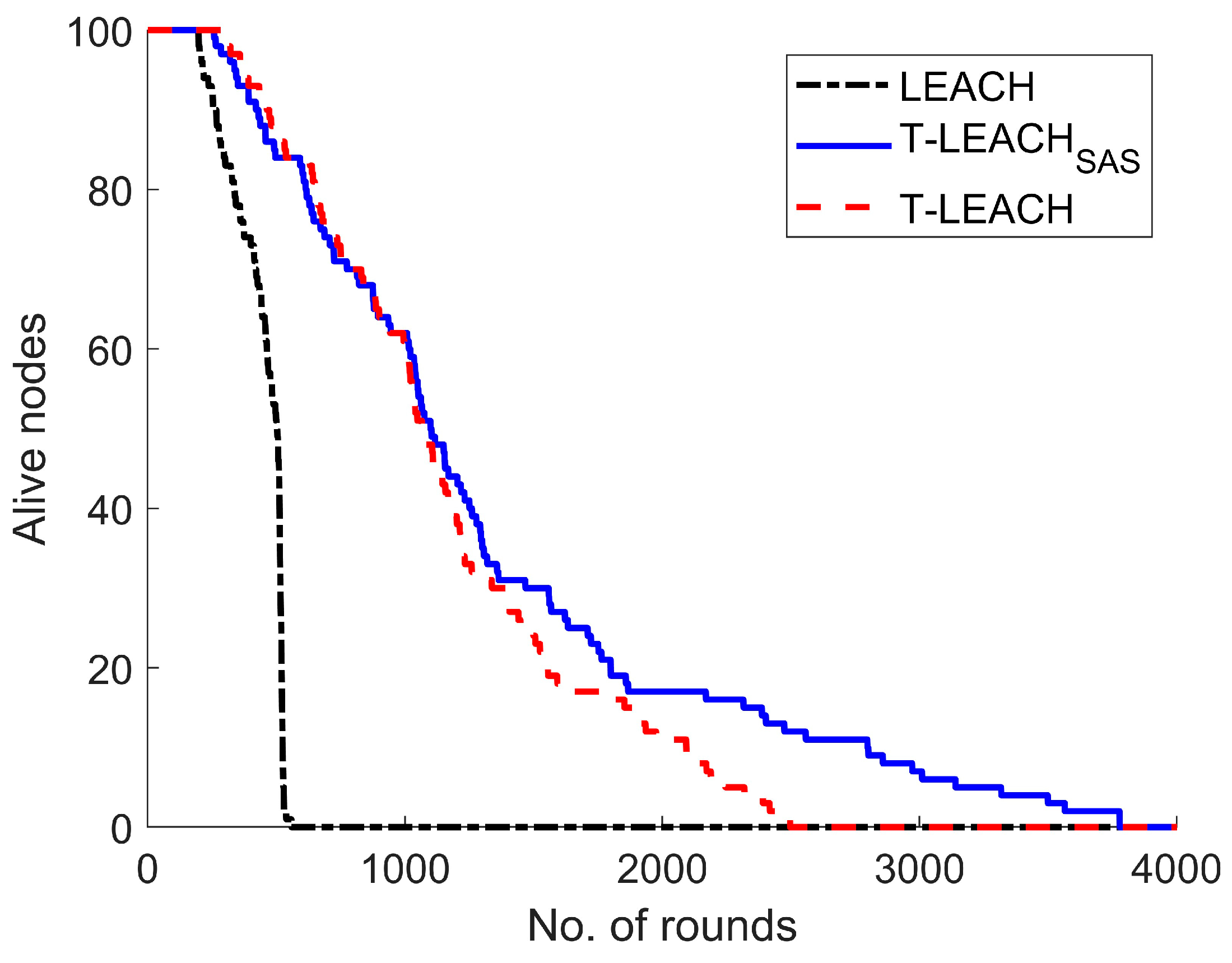
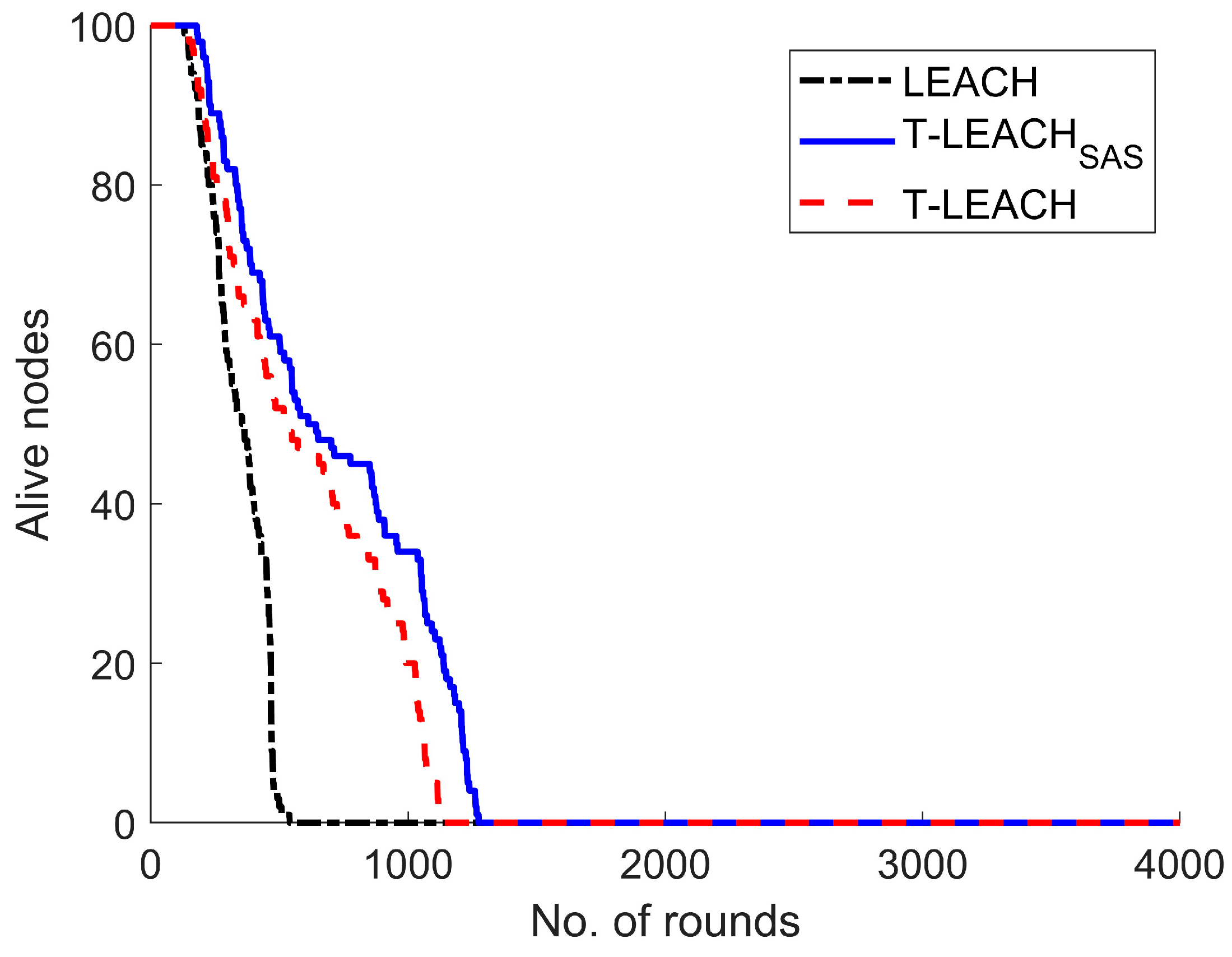
In the first three scenarios simulated, the protocol performance was evaluated in denser and sparser network configurations, and the influence of the density of the nodes was investigated, as well as the location of the base station within the field of interest. Specifically, in the first scenario studied, it was supposed that the WSN under consideration comprises of a base station located at position (100, 100) along with 100 nodes. It was found that T-LEACH
SAS, considering the depletion of last living node, achieves an extension of network lifetime by 575% when compared to LEACH and by 51.3% when compared to T-LEACH.
Figure 3 illustrates the number of the network nodes that remain alive per simulation round.
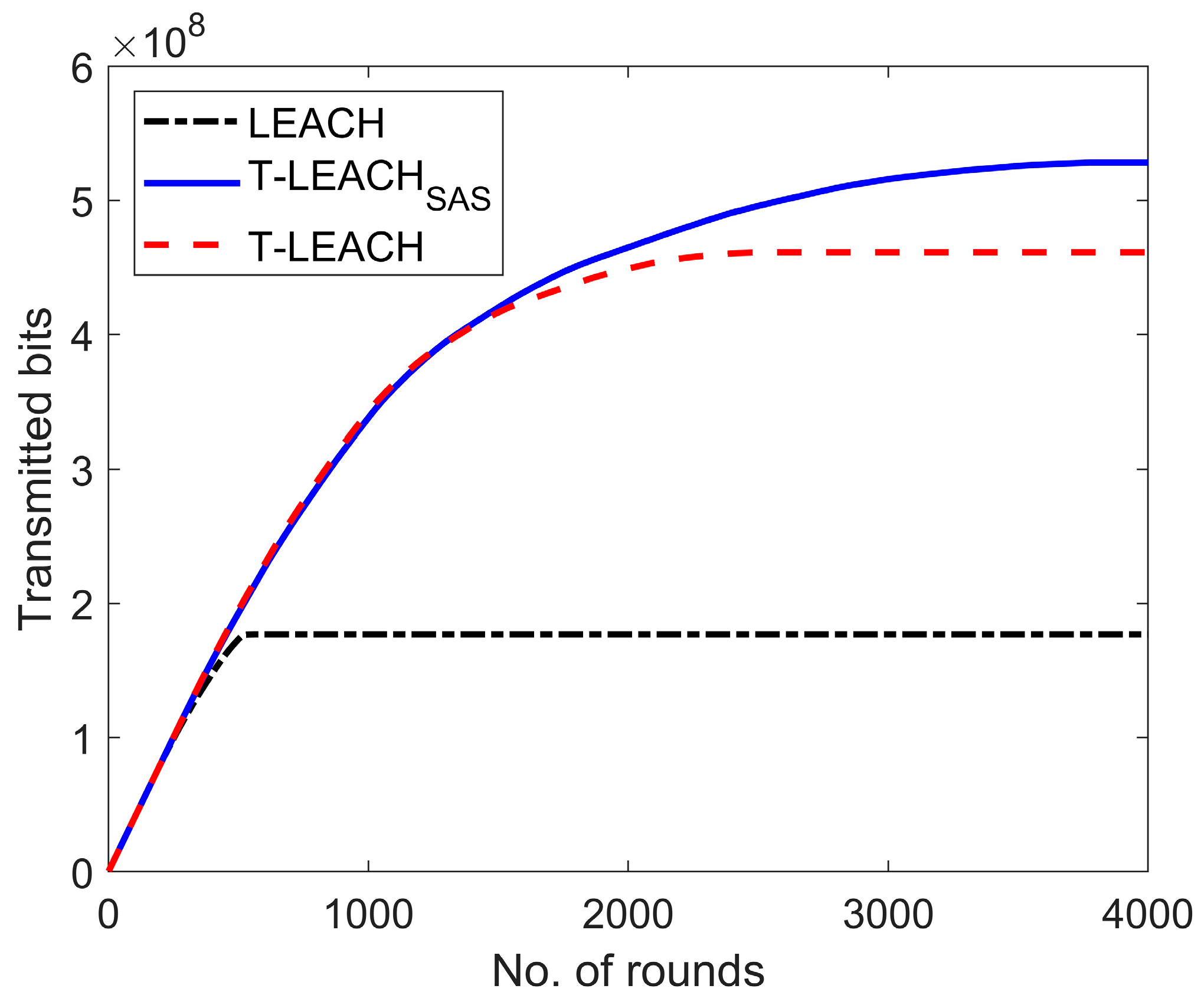
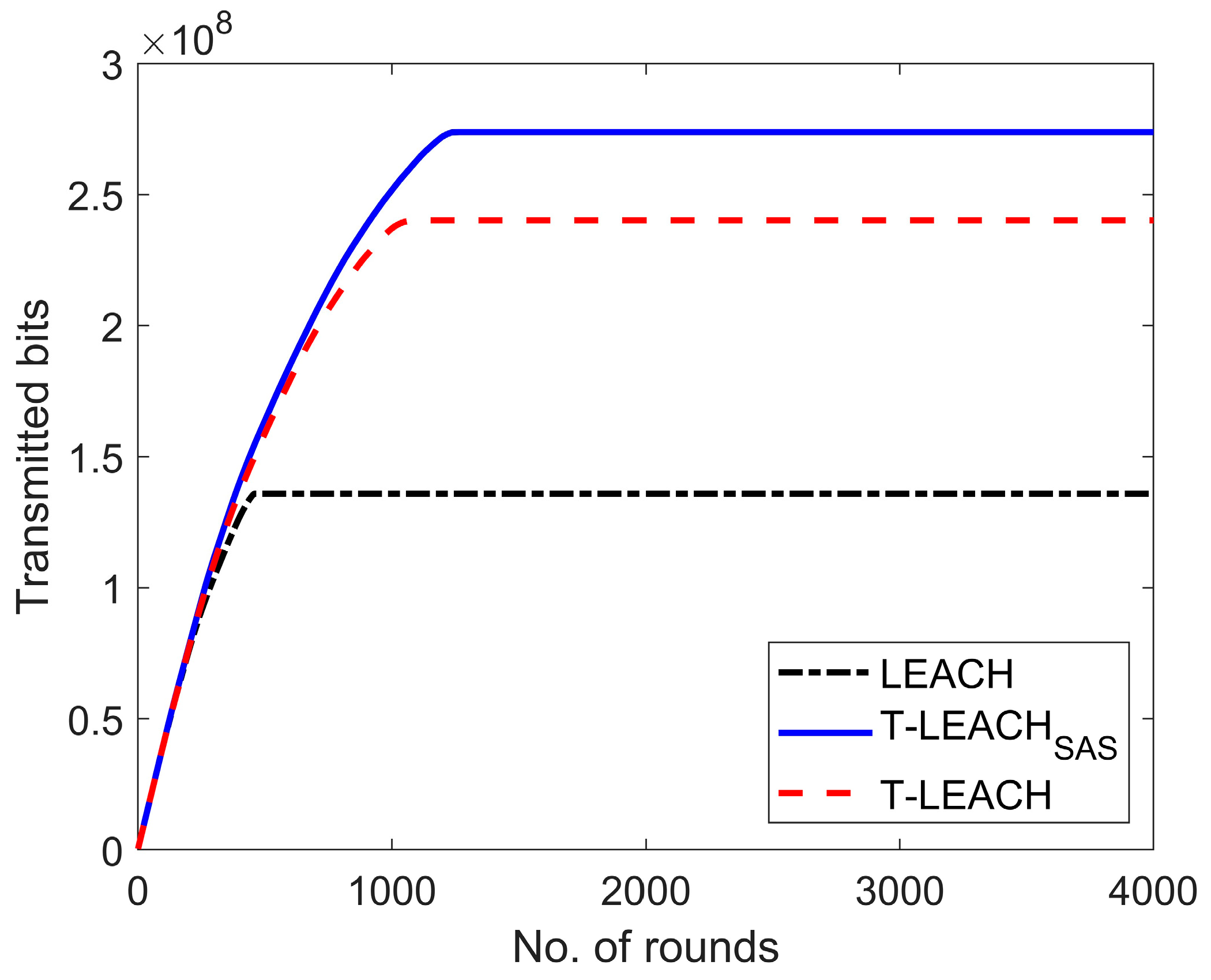
Also, it was found that the total volume of data transmitted to the base station by using T-LEACH
SAS are increased by 198% and 14.5% when compared to that achieved when using LEACH and T-LEACH, respectively.
Figure 4 illustrates the total volume of data transmitted per simulation round in the first simulation scenario.
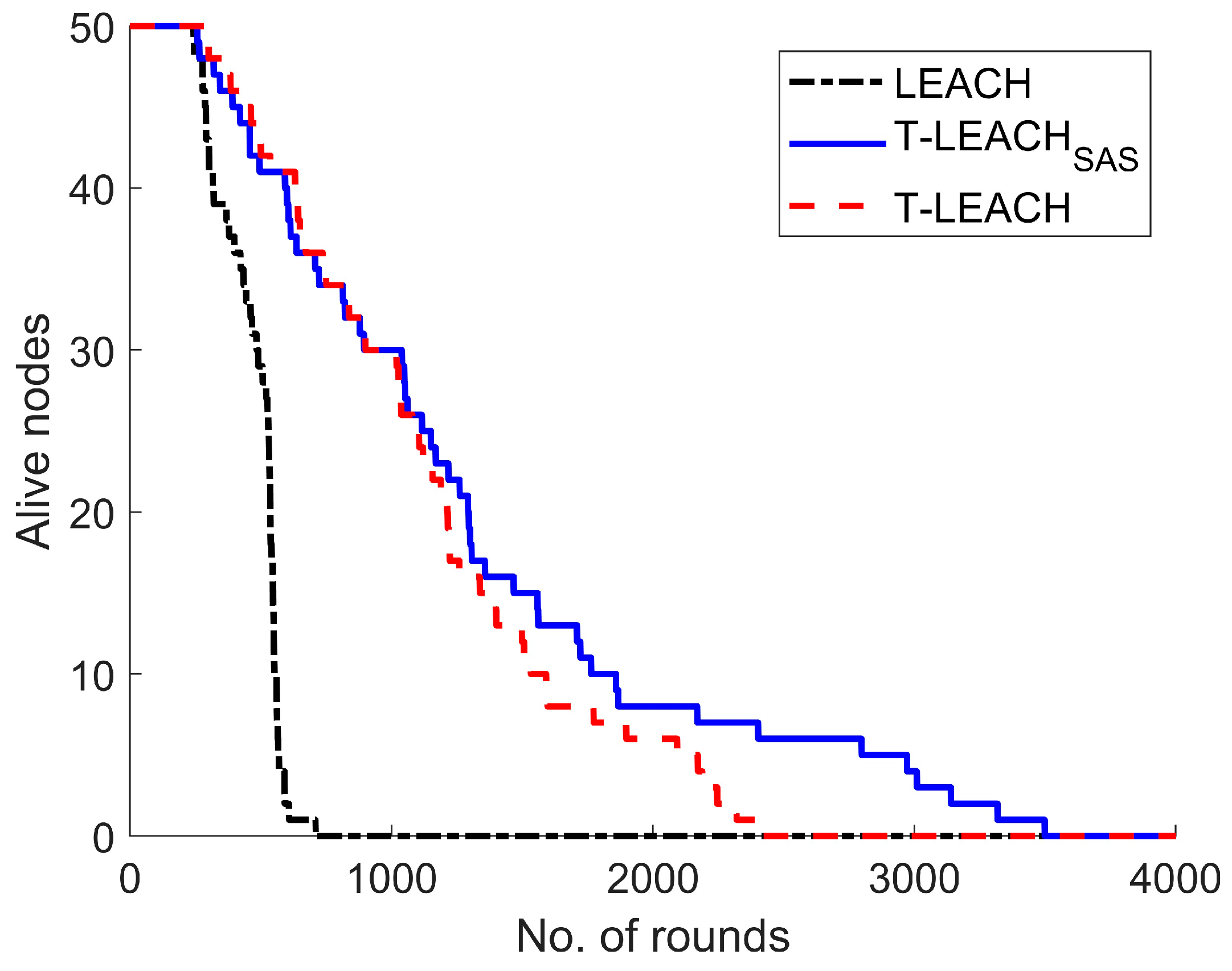
Similarly, in the second scenario studied, it was supposed that the WSN under consideration comprises of a base station located at position (100, 100) along with 50 nodes. It was found that T-LEACH
SAS, considering the depletion of last living node, achieves extension of network lifetime by 393% when compared to LEACH and by 46.3% when compared to T-LEACH.
Figure 5 illustrates the number of the network nodes that remain alive per simulation round.
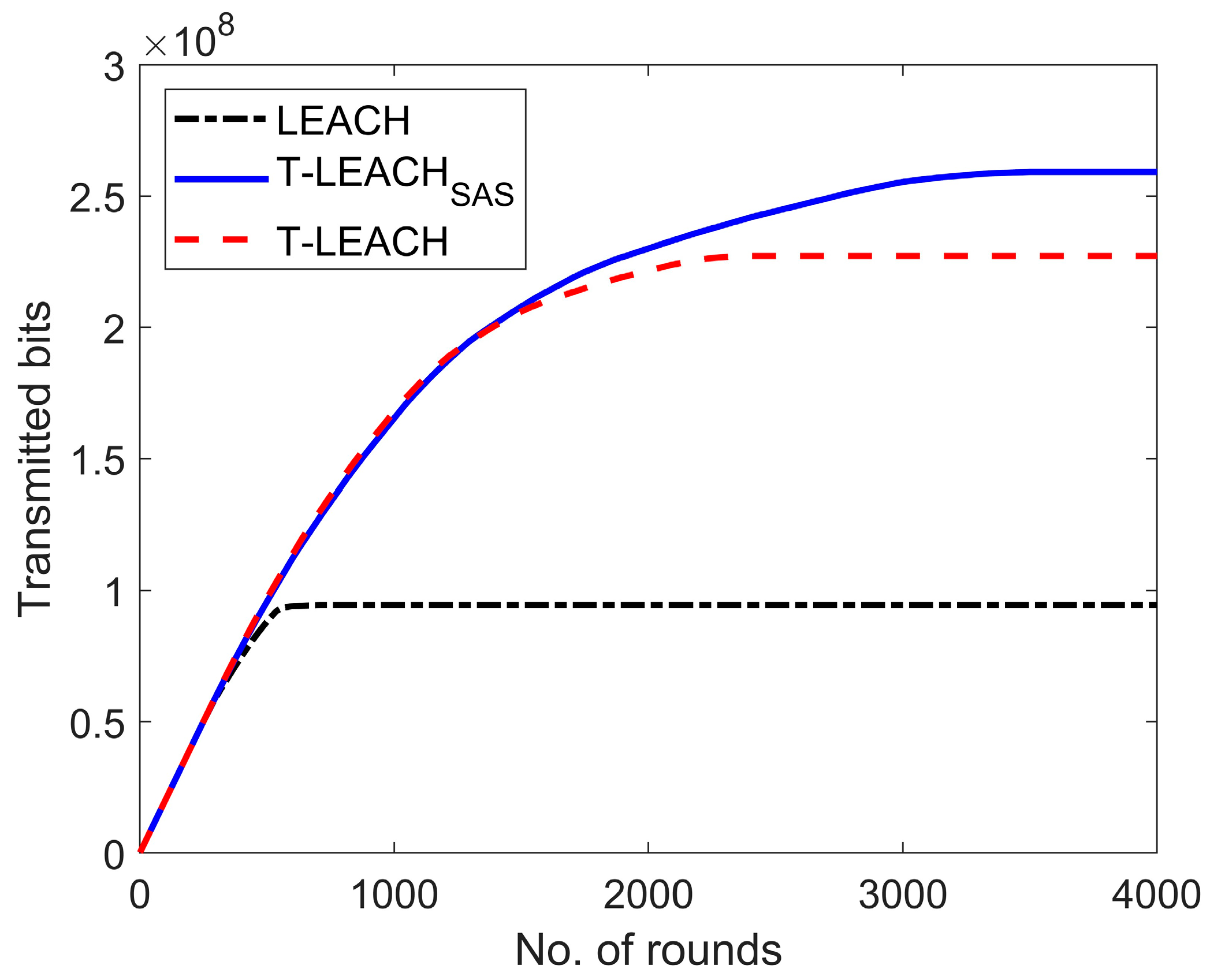
Moreover, it was found that the total volume of data transmitted to the base station by using T-LEACH
SAS increased by 175% and 14.1% when compared to that achieved when using LEACH and T-LEACH, respectively.
Figure 6 illustrates the total volume of data transmitted per simulation round in the second simulation scenario.
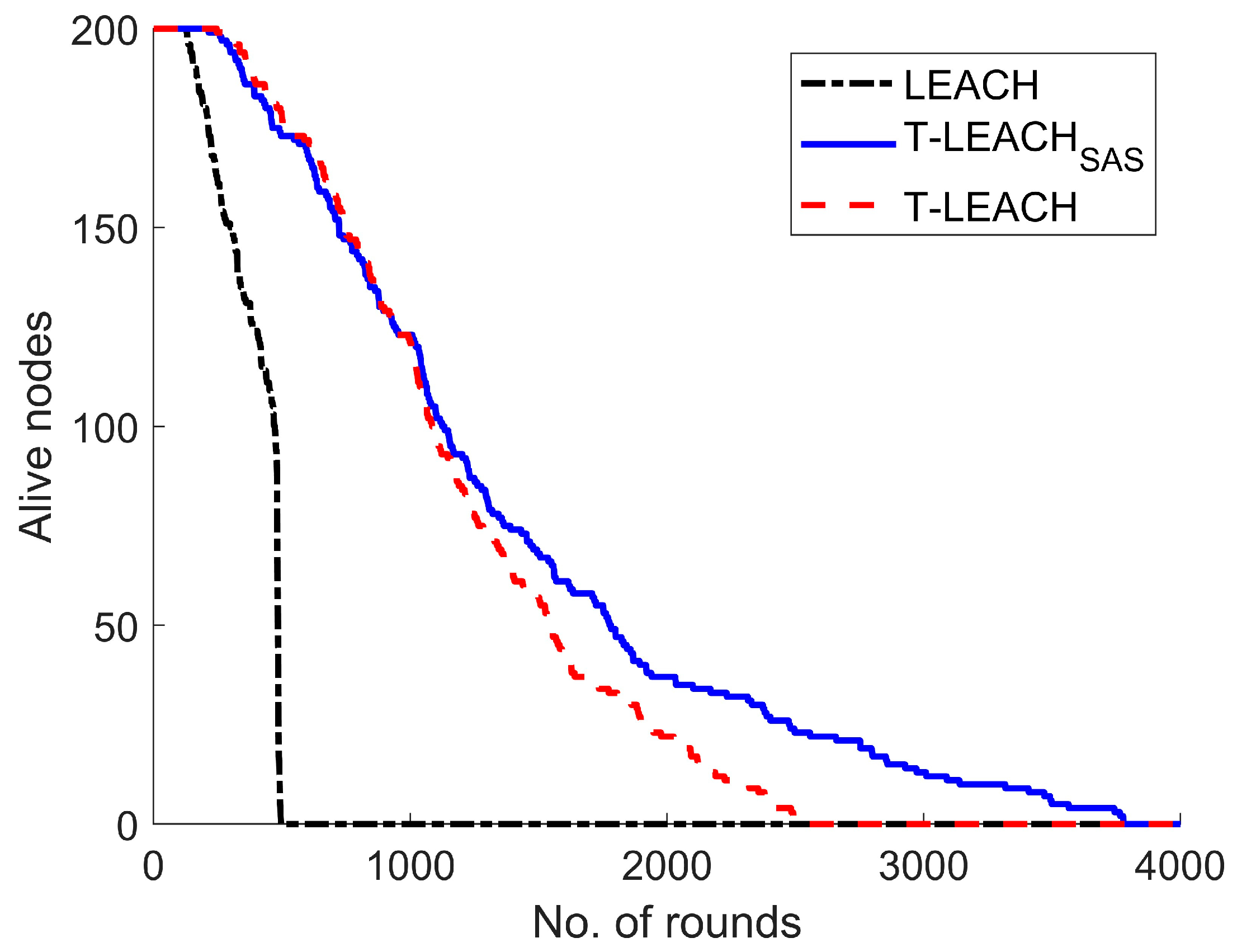
Likewise, in the third scenario studied, it was supposed that the WSN under consideration comprises of a base station located at position (100, 100) along with 200 nodes. It was found that T-LEACH
SAS, considering the depletion of the last living node, achieves an extension of network lifetime by 659% when compared to LEACH and by 51.2% when compared to T-LEACH.
Figure 7 illustrates the number of the network nodes that remain alive per simulation round.
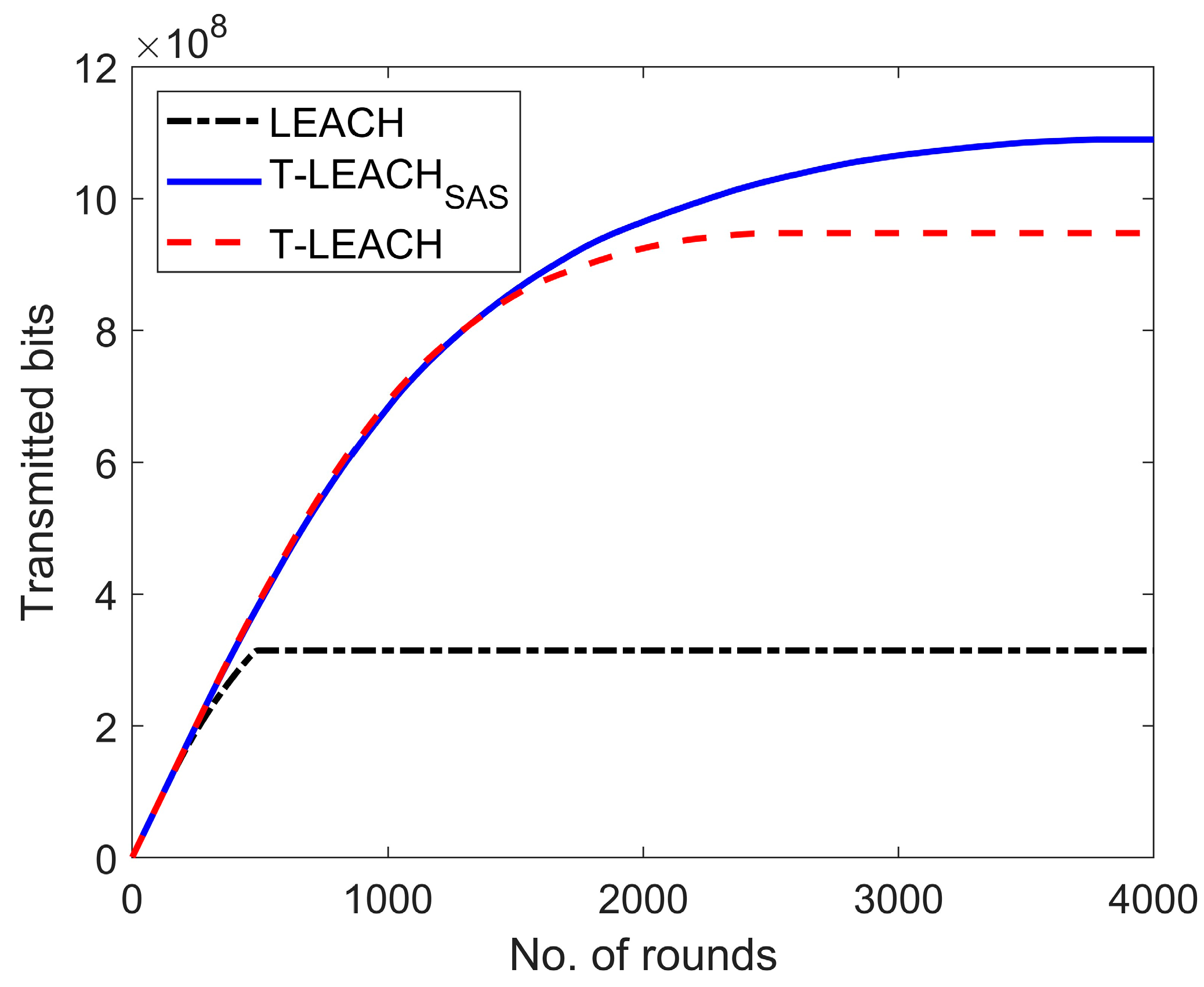
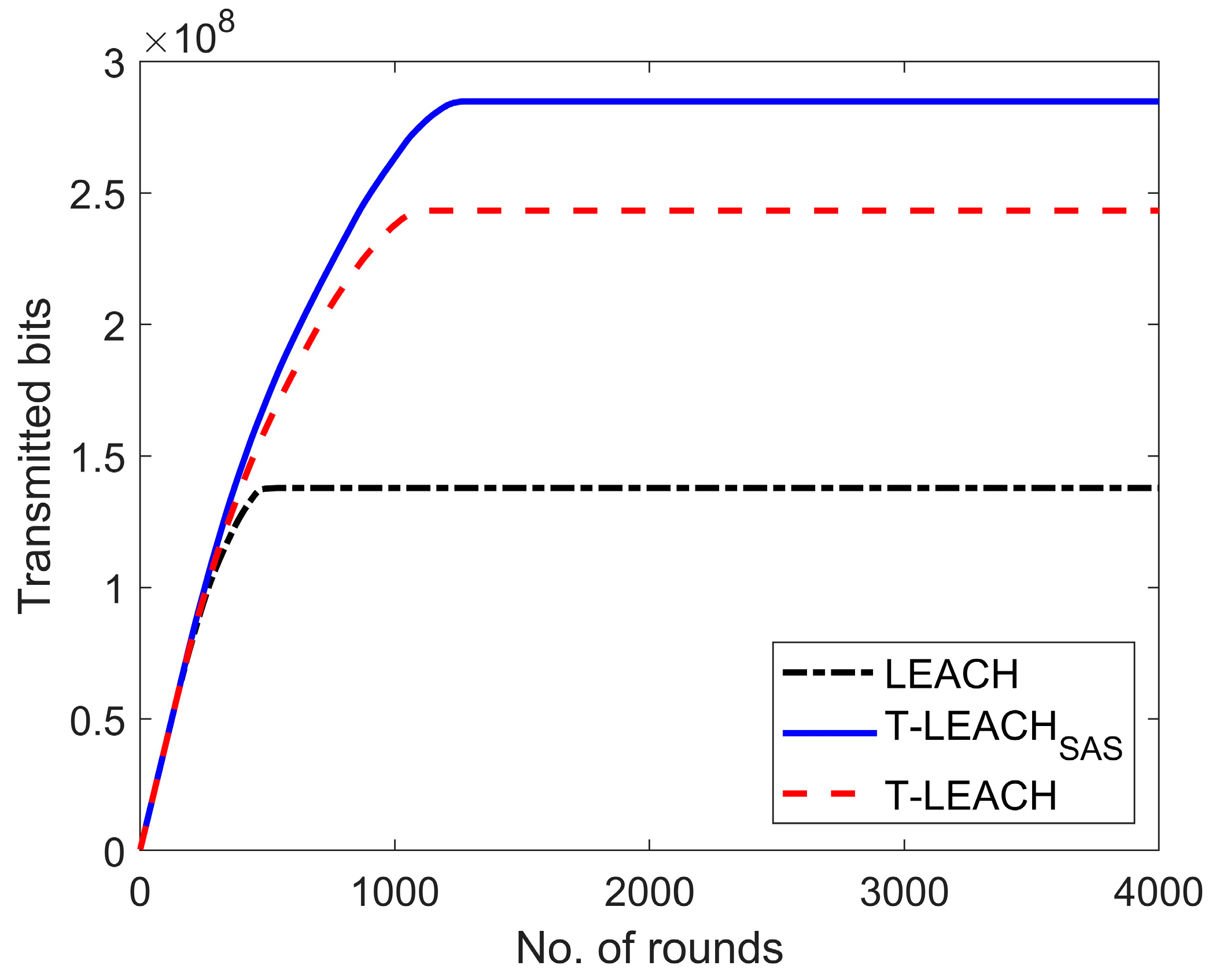
Also, it was found that the total volume of data transmitted to the base station by using T-LEACH
SAS increased by 247% and 15% when compared to that achieved when using LEACH and T-LEACH, respectively.
Figure 8 depicts the total volume of data transmitted per simulation round in the third simulation scenario.
Based on the first three scenarios investigated, it becomes obvious that both in sparse and dense network topologies, T-LEACHSAS compared to LEACH and T-LEACH provides considerably longer lifetime of network nodes. Consequently, thanks to their extended lifespan network, nodes transmit a greater volume of data to the base station, as confirmed by the simulation results.
Next, in the fourth scenario studied, it was supposed that the WSN under consideration comprises of a base station located at position (0, 0) along with 100 nodes. It was found that T-LEACH
SAS, considering the depletion of the last living node, achieves an extension of network lifetime by 174% when compared to LEACH and by 15.2% when compared to T-LEACH.
Figure 9 graphically demonstrates the number of the network nodes that remain alive per simulation round.
Furthermore, it was found that the total volume of data transmitted to the base station by using T-LEACH
SAS increased by 102% and 14% when compared to that achieved when using LEACH and T-LEACH, respectively.
Figure 10 depicts the total volume of data transmitted per simulation round in the fourth simulation scenario.
Finally, in the fifth scenario studied, it was supposed that the WSN under consideration comprises of a base station located at position (100, 220) along with 100 nodes. It was found that T-LEACH
SAS, considering the depletion of last living node, achieves an extension of network lifetime by 136% when compared to LEACH and by 12% when compared to T-LEACH.
Figure 11 graphically demonstrates the number of the network nodes that remain alive per simulation round.
Moreover, it was found that the total volume of data transmitted to the base station by using T-LEACH
SAS increased by 107% and 17.1% when compared to that achieved when using LEACH and T-LEACH, respectively.
Figure 12 depicts the total volume of data transmitted per simulation round in the fifth simulation scenario.
The study of the first scenario in common with the fourth scenario and the fifth scenario makes it clear that the closer to the center of the field of interest the base station is located, the higher energy efficiency and greater data transfer are achieved. Actually, the base station is situated at the edge of the network field in the fourth scenario and out of the bounds of the network field in the fifth scenario. Thus, the average distance of the sensor nodes to the base station is accordingly increased in these last two scenarios examined. So, given that the energy consumption due to data transmission rises along with the distance of transmission, in the two boundary placements of the base station studied in the fourth and fifth scenarios, the energy reserves of the nodes are remarkably depleted, and consequently, the overall network lifespan and the data bits transmitted are both considerably decreased. Yet, in all cases, T-LEACHSAS still proves to be superior to both LEACH and T-LEACH in regards of both these metrics.
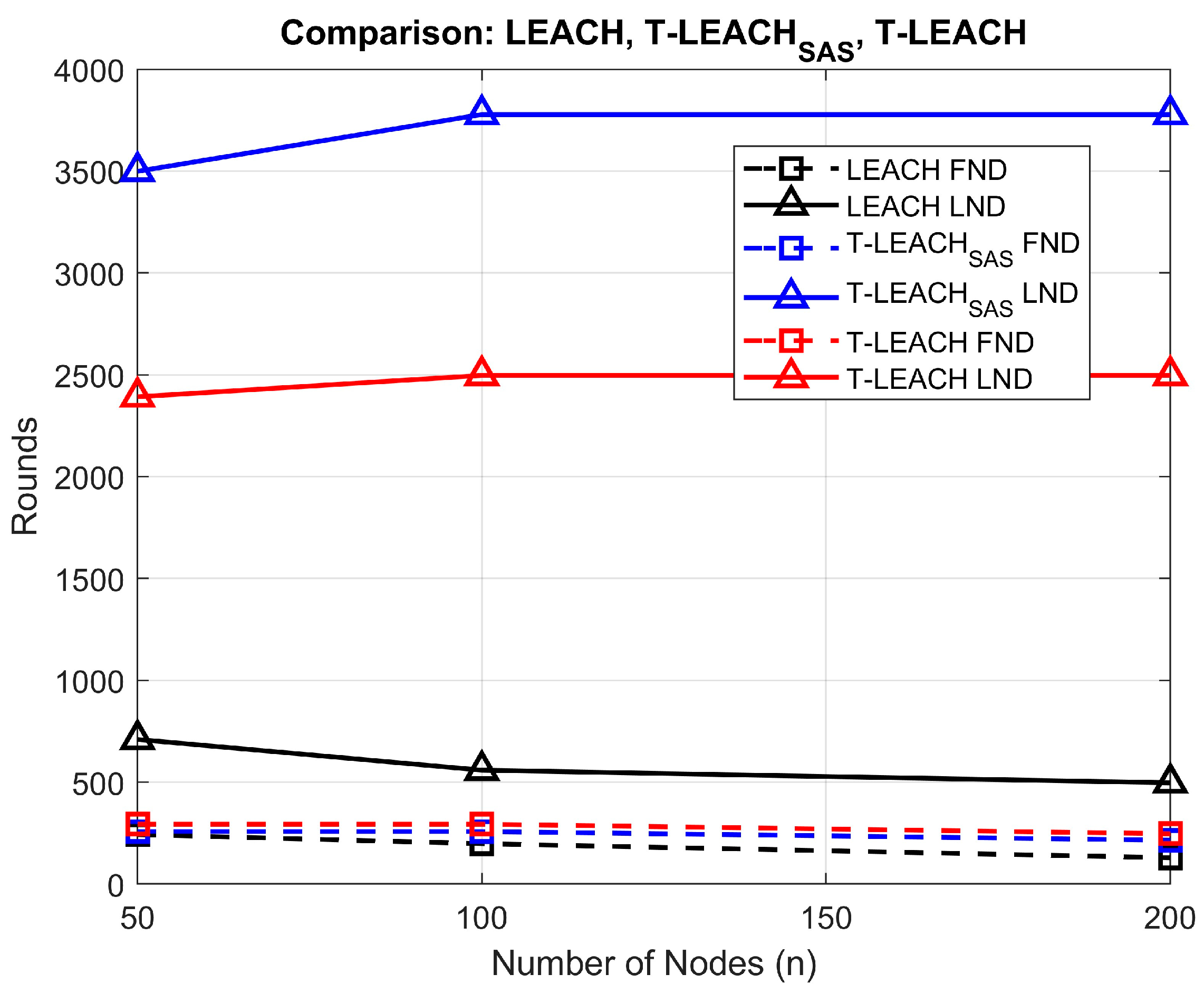
Finally,
Figure 13 depicts the influence of the number of network nodes as selected in scenarios 1, 2, and 3 on the performance of the three protocols in comparison, regarding the round that the first node dies (FND) and the round that the last node dies (LND). It is evident that T-LEACH
SAS performs well, regardless of the differentiation in both denser and sparser network configurations.
6. Conclusions
This research article focused on hierarchical, energy-efficient routing protocols for WSNs and particularly LEACH, which is a pioneering protocol of this type, along with some of its numerous descendants. Specifically, an overview of typical examples of these protocols was provided, while their main advantages and disadvantages were indicated. From the study conducted, it was made evident that LEACH descendants have proven to enhance the operation of their ancestor regarding energy efficiency. Nevertheless, such protocols differentiate too in terms of many other metrics, such as scalability, throughput, cluster formation, complexity, load balance, processing and communication overhead, latency, communication model, location information, modulation techniques, fault tolerance, and channel encoding. For these reasons, it is apparent that the aptness of each hierarchical protocol for energy-efficient routing in WSNs is application-dependent.
Additionally, a novel protocol of this type named T-LEACHSAS was proposed. The specific protocol combines the threshold-based approach for selecting cluster heads that was first introduced in T-LEACH, which is a well-known protocol, along with a mechanism for sleep–awake scheduling, which ensures that nodes transition between active and sleep modes judiciously and, thus, conserve energy during periods of inactivity. The results of the simulation tests executed in all scenarios examined evinced that T-LEACHSAS enhances the beneficial outcomes of T-LEACH and, consequently, constitutes a promising choice for energy-efficient routing in WSNs, because it effectively reduces energy wastage on unnecessary data transmissions and inefficient clustering. On the other hand, sleep–awake scheduling is inevitably associated with the intermittent operation of the network, which may be inappropriate for a certain number of applications.
The authors of this article intend to extend their future research, so that it will incorporate energy efficiency along with other metrics in order to achieve the multiobjective optimization of WSNs’ performance.







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}