1. Introduction
Traffic in data centers has grown rapidly over the past decade due to the rapid growth of cloud computing and big data applications. This in turn drives the development of robust, high-speed, and energy-efficient interconnects to transfer the data around the data center. Several 100+ Gb/s optical links have recently been reported to satisfy the bandwidth and reach requirements [
1,
2,
3]. However, the associated cost and power dissipation prevent their widespread adoption within the data center. In short-reach photonic links, the transmitted optical modulation amplitude (OMA) must be sufficiently large that, in spite of coupling and fiber losses, the received optical power exceeds the receiver’s sensitivity limit. This sensitivity is a function of the input-referred noise current of the receiver as well as the voltage amplitude requirements of the decision circuit driven by the receiver front-end [
4]. Therefore, an energy-efficient link design requires a low-noise as well as a high-gain receiver.
As data rates increase, traditional approaches to receiver design dictate that the bandwidth of the receiver also increases, which limits the maximum achievable gain [
5]. This trade-off is less pronounced in SiGe BiCMOS technologies where the transistor has higher intrinsic gain and transit frequency. Therefore, a reasonable gain is still achievable in wideband deigns. However, in CMOS, the trade-off limits the per-stage gain which necessitates cascading several gain stages to achieve the targeted output voltage amplitude. With increased number of stages, both noise and power dissipation increase.
This paper presents a novel inductorless design technique for high-gain optical receiver front-ends.
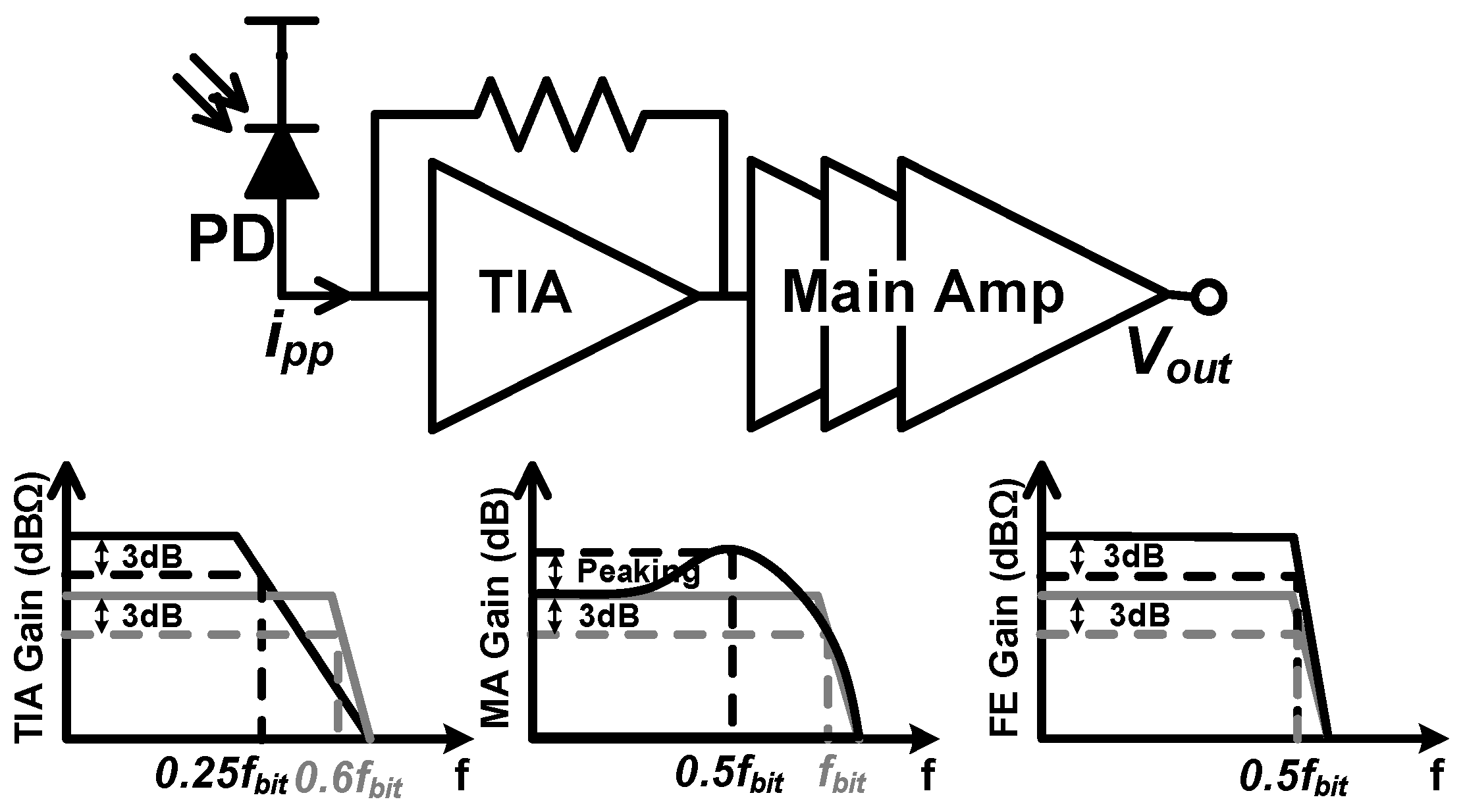
Figure 1 illustrates the operation of the proposed front-end (FE) in contrast to the traditional wideband FE. Conventionally, the transimpedance amplifier (TIA) and the follow-on main amplifier (MA) are designed to have bandwidths in the order of
and
, respectively, to achieve an overall bandwidth of approximately
[
4]. In the proposed receiver, first, the TIA’s bandwidth is reduced to approximately 25 % of the targeted data rate. The reduced TIA bandwidth allows for higher gain, lower input-referred noise, and fewer follow-on gain stages. The reduction in bandwidth also introduces inter-symbol interference (ISI) to the extent that the TIA’s output eye diagram is fully closed. Unlike a bandlimited electrical channel which can introduce more than 30 dB of channel loss at the Nyquist frequency
, the low-bandwidth TIA introduces a moderate frequency-dependent attenuation. Consequently, a few dBs of amplitude peaking at
fN is sufficient to restore the required bandwidth (for example, the equalizer in [
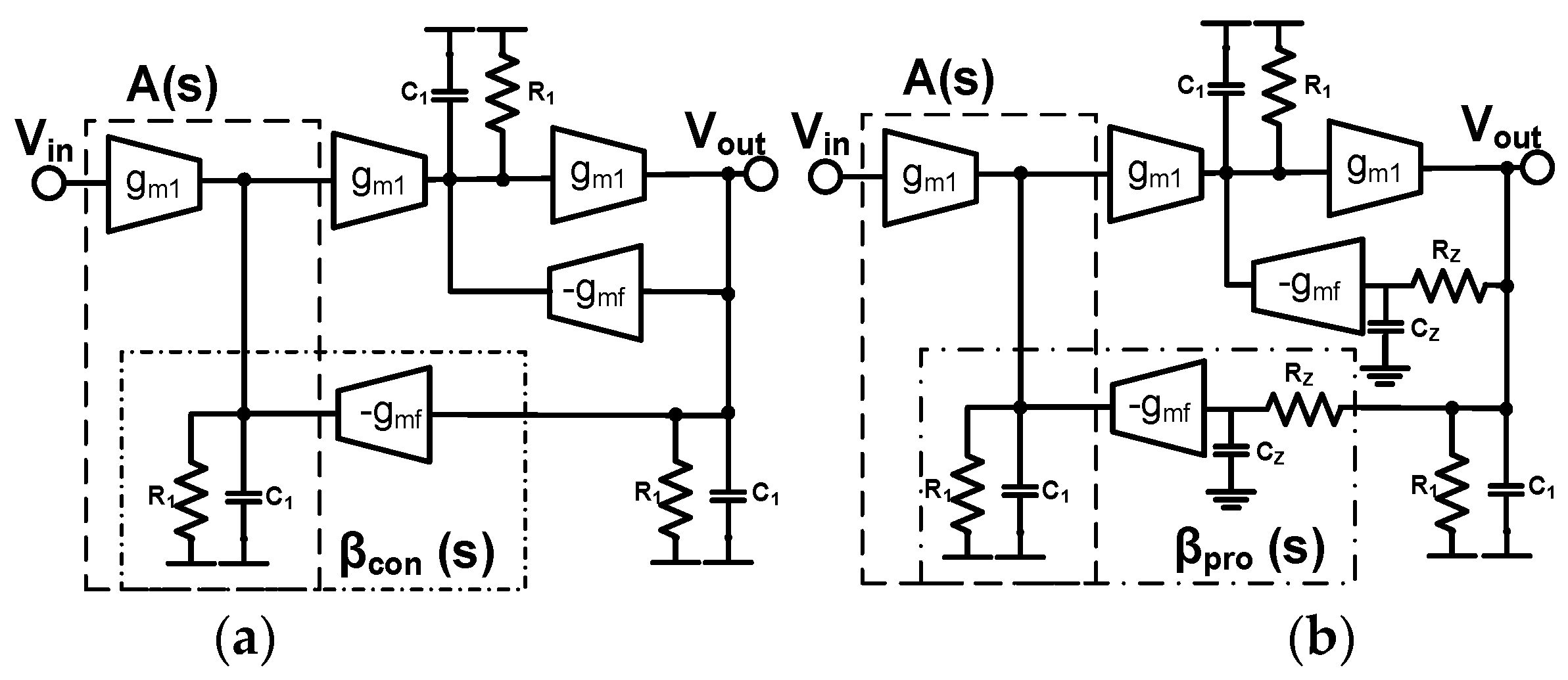
6] introduces only 7 dB of peaking). Therefore, in the second step of the proposed design technique, a high-frequency peaking is intentionally introduced in the main amplifier’s amplitude response without impairing its low-frequency gain. Various possible designs of active feedback-based MA architectures [
7,
8,
9,
10] can introduce the required peaking by adding a pole in their feedback loops. The amplitude peaking in the equalizing main amplifier (EMA) is then used to compensate for the TIA’s limited bandwidth to restore an overall bandwidth of approximately
. Although
Figure 1 shows only the magnitude response of the TIA and EMA, group-delay variation must also be considered.
In contrast to traditional continuous-time linear equalizer (CTLE)-based designs [
6,
11], the proposed front-end attains the improved sensitivity and high-gain of these designs, while achieving better energy efficiency due to the elimination of the standalone equalizer stage(s). Traditional approaches to CTLE design, based on RC degenerated common-source amplifiers, suffer from a limited bandwidth and consequently insufficient peaking at high frequencies. When CTLEs are cascaded the reduction in overall bandwidth due to repeated real poles follows the same trend as that of 1st-order gain cells. Further, a 1st-order CTLE stage has a limited capability in equalizing a second-order TIA [
6,
12] which necessitates cascading several equalizer stages, further increasing power and area overheads. On the other hand, various inductorless feedback techniques can be used to design main amplifiers with gain-bandwidth products (GBW) far superior to a cascade of first-order stages [
7,
8,
9,
10]. The improvement is the result of poles moving away from the negative real axis. A combination of poles with high- and low-quality factors gives better GBW for the same pole magnitude. The proposed approach to design an EMA improves the overall receiver performance by increasing the gain of the TIA and improving noise performance as argued [
6], but with the wideband performance of state-of-the-art MA designs.
The proposed design technique requires co-designing the TIA and the subsequent equalizing amplifier. Therefore, both stages receive equal attention in the analysis.
Section 2 in this paper provides a detailed analysis of the TIA, highlighting the trade-off between its gain and bandwidth.
Section 3 introduces the concept and the block diagram of the proposed EMA. The performance of the overall FE (TIA/EMA) is studied in
Section 4.
Section 5 shows the circuitry and simulation results of the proposed FE in comparison to the conventional full bandwidth design. Finally,
Section 6 concludes the work.
5. Circuitry and Layout of the Implemented Front-End
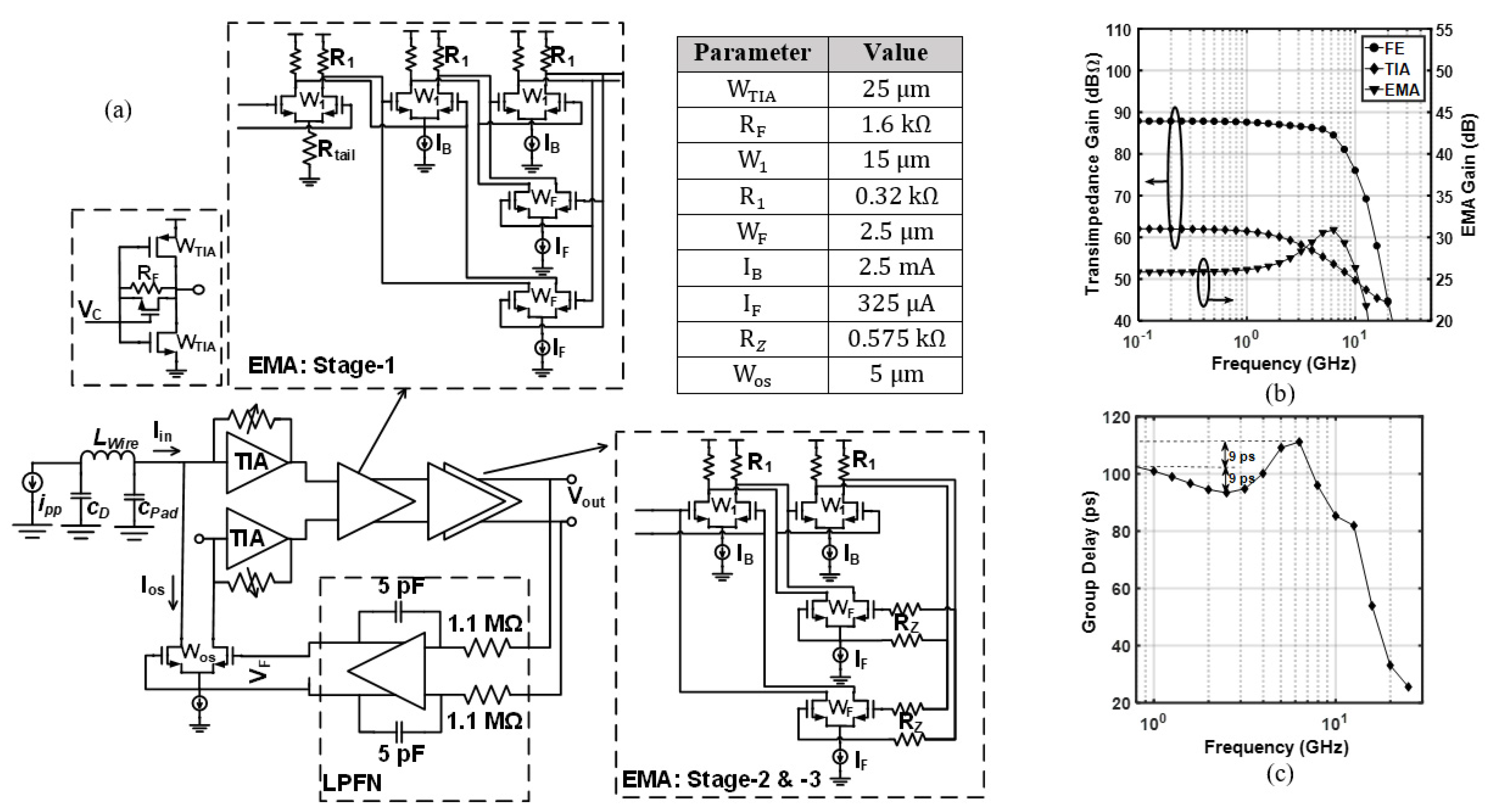
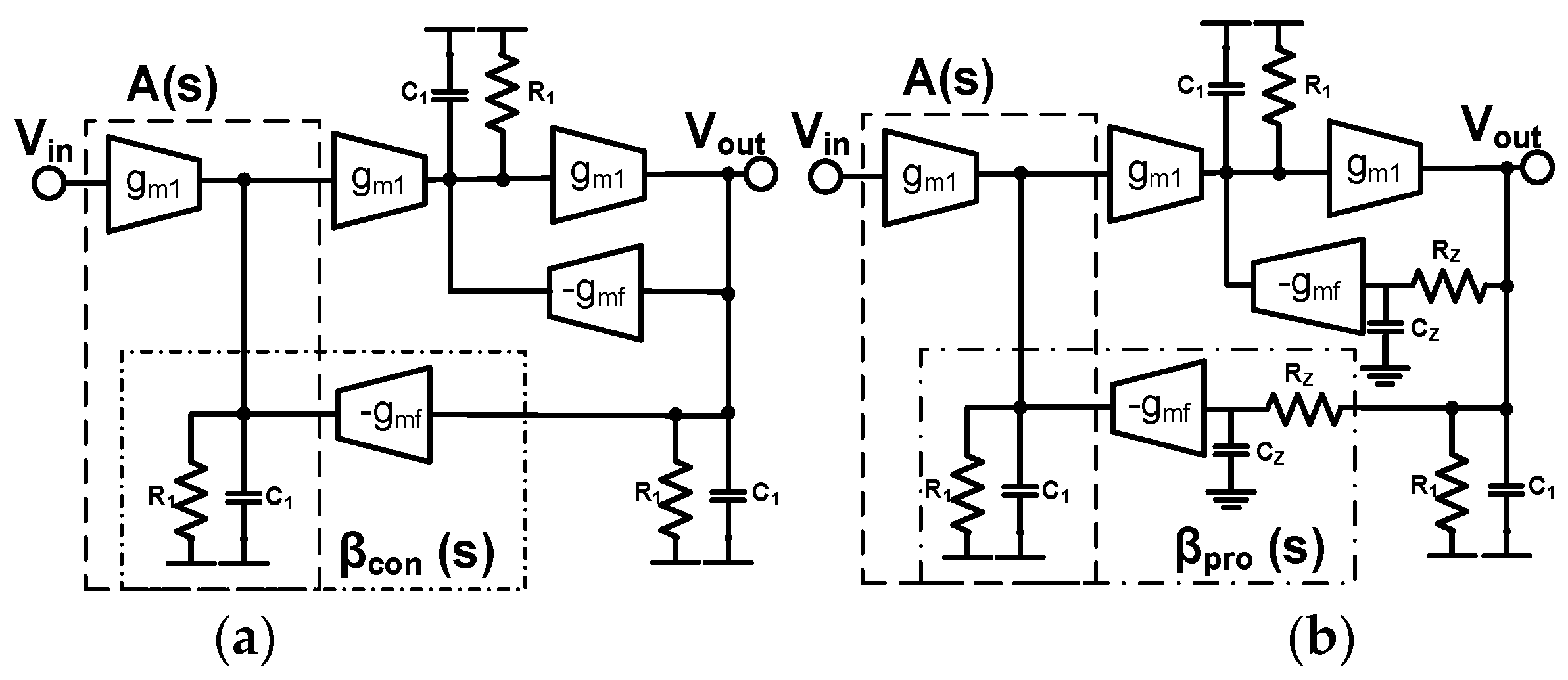
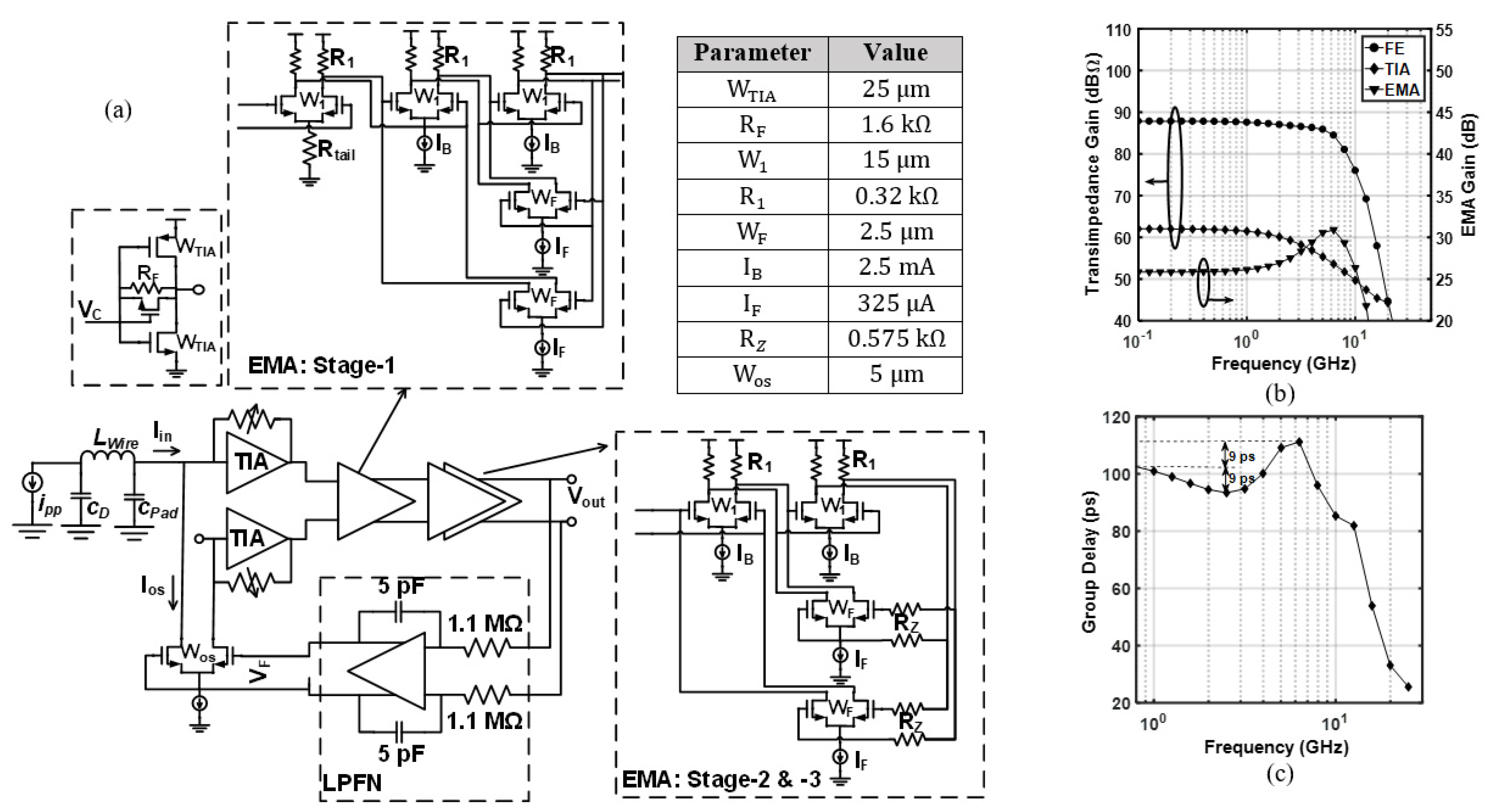
Figure 11a shows the block diagram and the circuitry of the implemented front-end. A replica TIA is used to provide pseudodifferential power-supply noise rejection. The TIA is followed by a three-stage EMA. A series resistor
is inserted in the feedback loops of the second and third stages. This resistor, in combination with the parasitic capacitance of the transistor in the feedback loops, creates the zero required for bandwidth extension. Compared to
Figure 7, the EMA’s third stage is added to relax the gain requirements and assist in recovering the bandwidth. A low-pass feedback network (LPFN) is connected between the output of the EMA and the input of the TIA. The LPFN amplifies the difference between the DC levels at
and returns a feedback voltage of
that is then converted to a current
by the transconductance of
and subtracted from the input current for offset compensation. The LPFN is a single-pole RC filter using a Miller-boosted
capacitor and a
resistor. A low cut-off frequency of
is achieved as a trade-off between the on-chip area and the tolerable baseline wander for long runs of consecutive identical digits. The low common-mode voltage at the TIA’s output prevents the use of a tail current source for the first differential pair in the EMA’s first stage and therefore a poly silicon resistor is used instead.
The FE is simulated in TSMC-65 nm using a Cadence Spectre simulator. The input parasitics are modeled by a pad capacitance
of
, a photodiode capacitance
of
and a bondwire inductance
of
. The loading from the subsequent output buffer is modeled by a load capacitance of
connected at the output of the EMA. An additional
capacitance is added to all nodes to model the wiring and layout parasitic. The receiver’s output stage (not shown in
Figure 11a) is a conventional differential amplifier with a load resistance of
chosen as a trade-off between output signal amplitude and compatibility with the off-chip
environment.
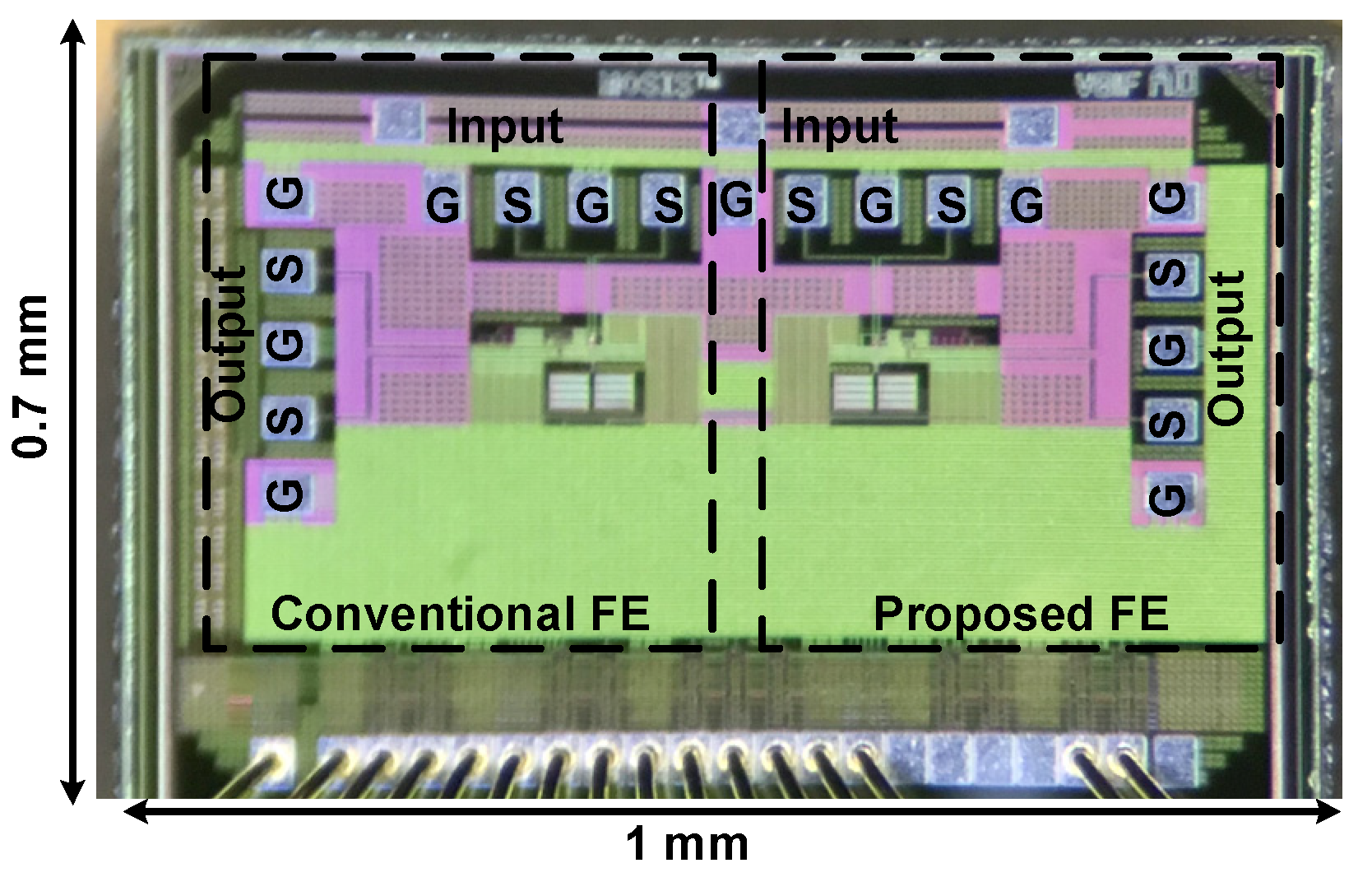
Figure 12 shows the chip layout in TSMC 65 nm CMOS technology. The chip includes two standalone FEs. One FE is the direct implementation of the circuit in
Figure 11a while the other is its conventional version (i.e.,
is replaced by a short circuit). The total size of the chip is
. Each front-end is pad limited and occupies
, including the I/O RF pads, while the active area, including the offset compensation loop, is about
. The high-speed RF input and output probing pads are differential G-S-G-S-G since each FE has differential inputs and outputs. The TIA, the MA/EMA, and the output buffer are powered by different supplies.
5.1. Validation of Bandwidth Extension
Similar to the previous section, both the proposed and the conventional FEs are simulated and compared. The proposed FE’s TIA bandwidth is
of the targeted
data rate. The tail current source in the feedback pair
sets the feedback gain
and is chosen to satisfy the power penalty condition. The series resistor
is then chosen to achieve the required bandwidth extension. The device dimensions and component values are tabulated in
Figure 11a for nominal
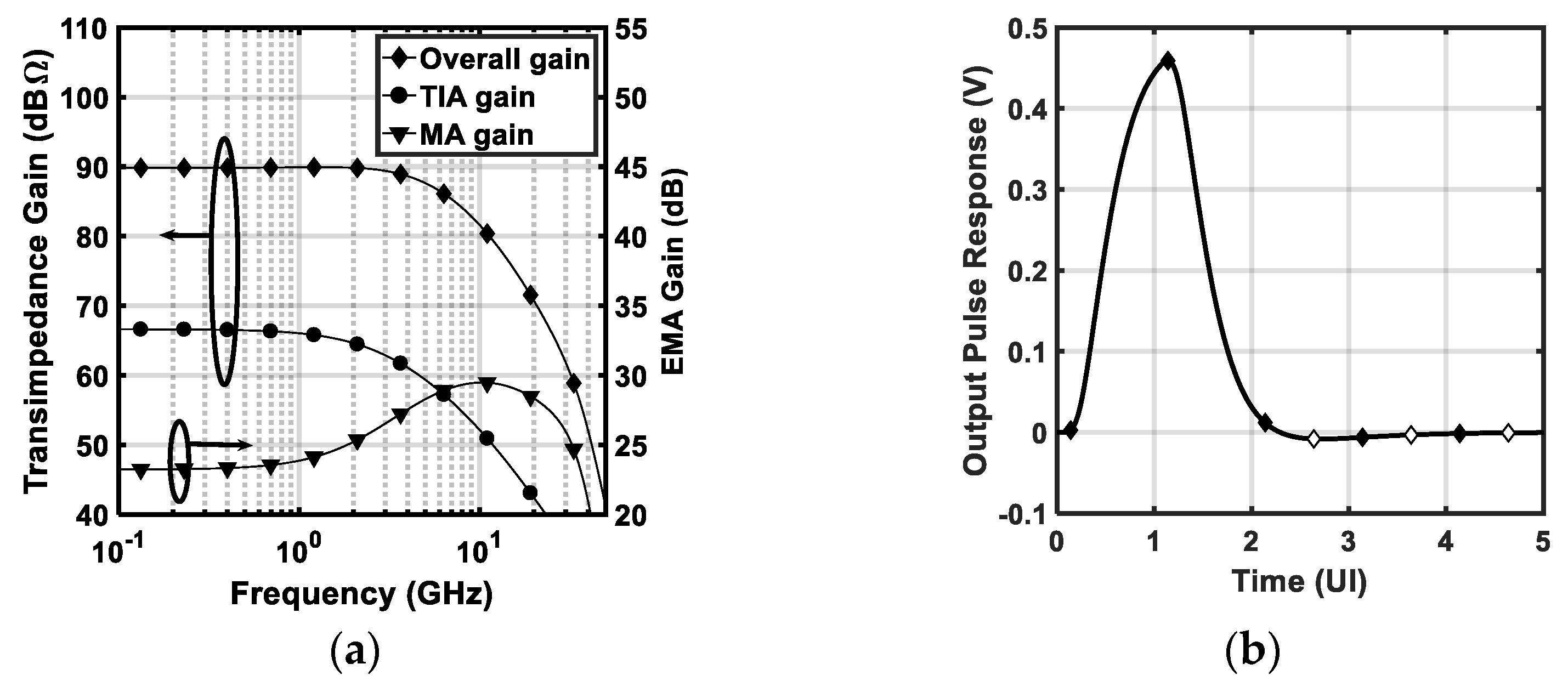
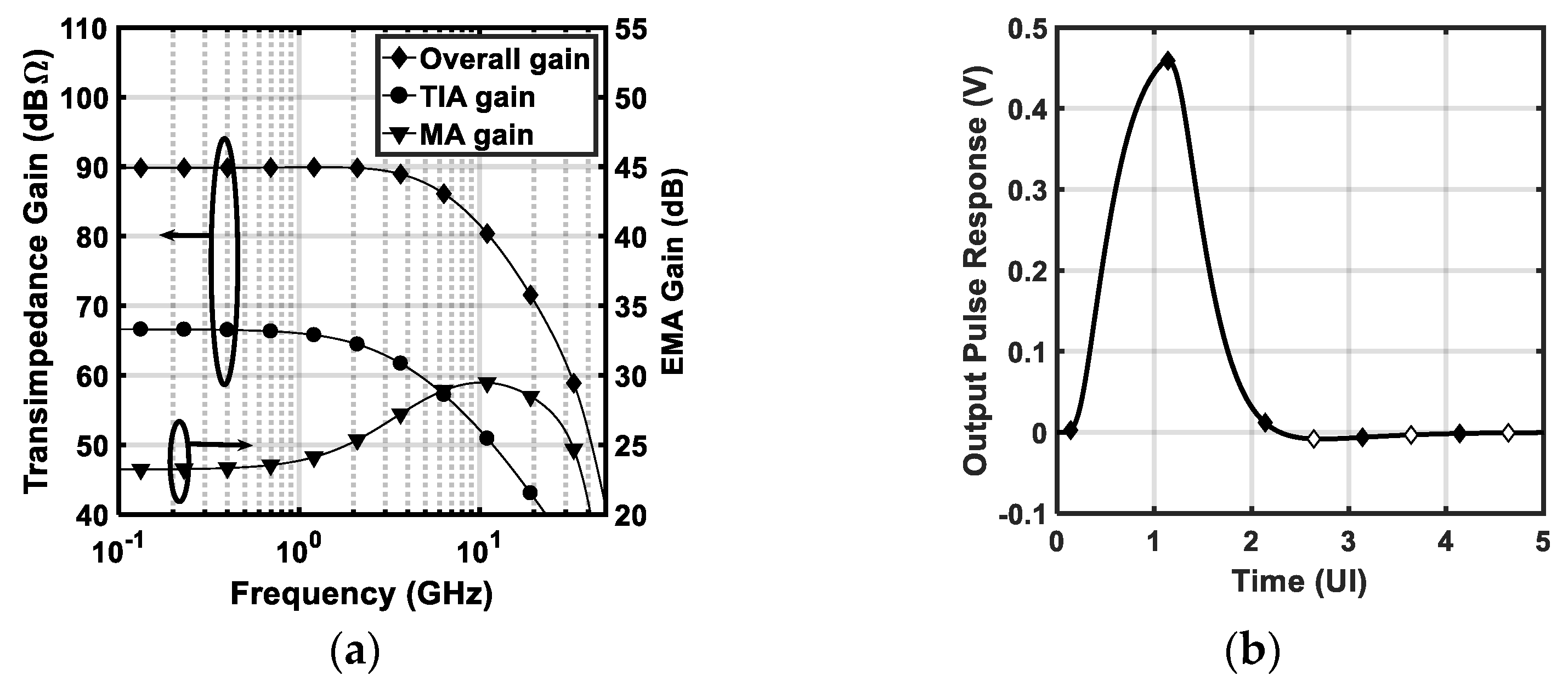
operation. All transistors in the signal and feedback paths use minimum length. Current sources, however, employ transistors with longer than minimum length. The corresponding amplitude responses are shown in
Figure 11b. The EMA introduces a peaking of 4.8 dB at the Nyquist frequency and restores the bandwidth by a factor of
, achieving an overall bandwidth of
.
The simulated group-delay is also shown in
Figure 11c where the GDV is within
of the unit interval over the frequency range of interest.
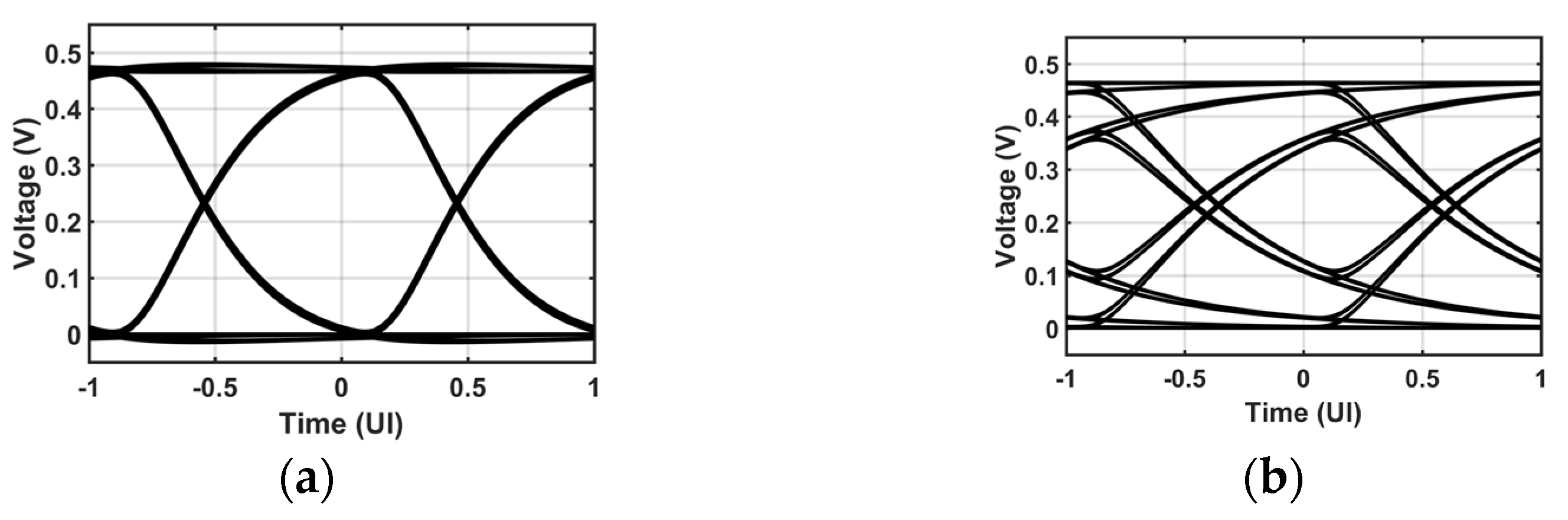
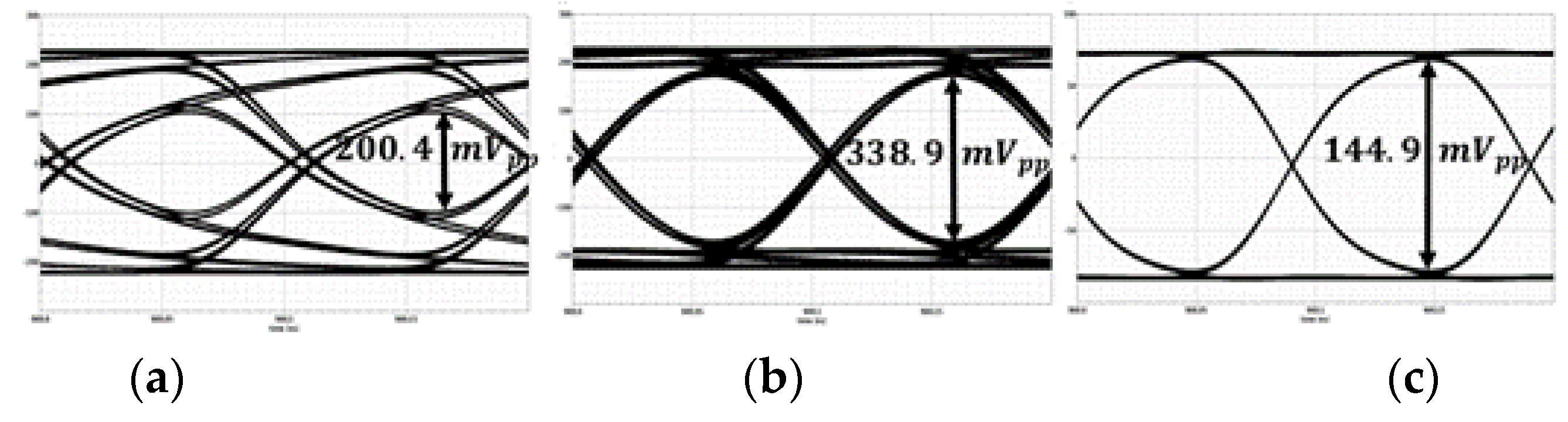
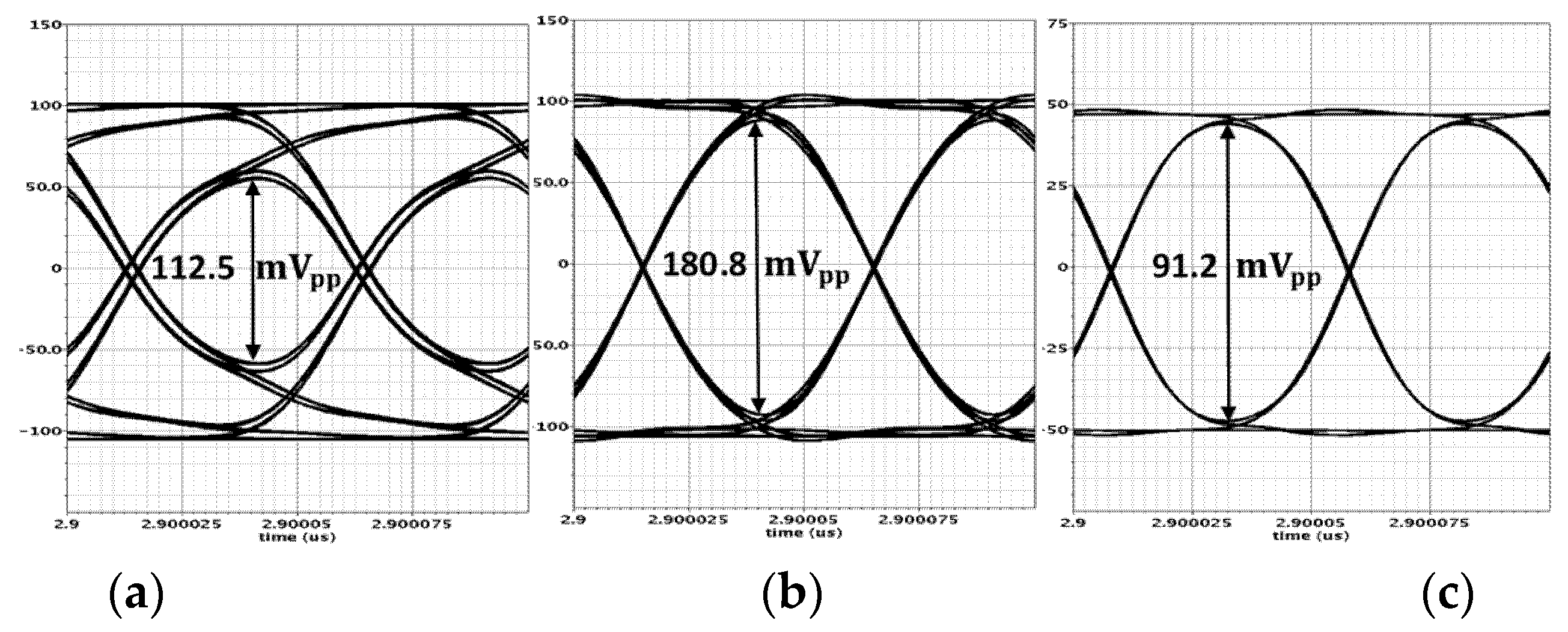
Figure 13a,b shows the
eye diagrams at the output of the FE when the limited-bandwidth TIA is followed by a wideband MA or by the EMA, respectively. The eye diagrams obtained through simulation demonstrate the capability of the proposed peaking technique in restoring the bandwidth without impairing the low-frequency gain. The bandwidth extension improves the VEO by a factor of 1.7
.
Figure 13c shows the eye diagram of the traditional FE. In this simulation,
is shorted and
is reduced to widen the TIA’s bandwidth while the current sources
are unchanged. Comparing
Figure 13b,c shows that the presented design technique improves the effective gain by a factor of 2.34
. Interestingly, for the proposed design, the gain is improved by almost the same amount as the TIA’s bandwidth is reduced. This emphasizes the linear relation between the gain and the bandwidth in the single-stage Inv-TIA.
Table 1 summarizes the simulated performance of the two FEs where the presented FE shows
better sensitivity compared to its conventionally designed counterpart.
5.2. Sensitivity to Process and Temperature Variations
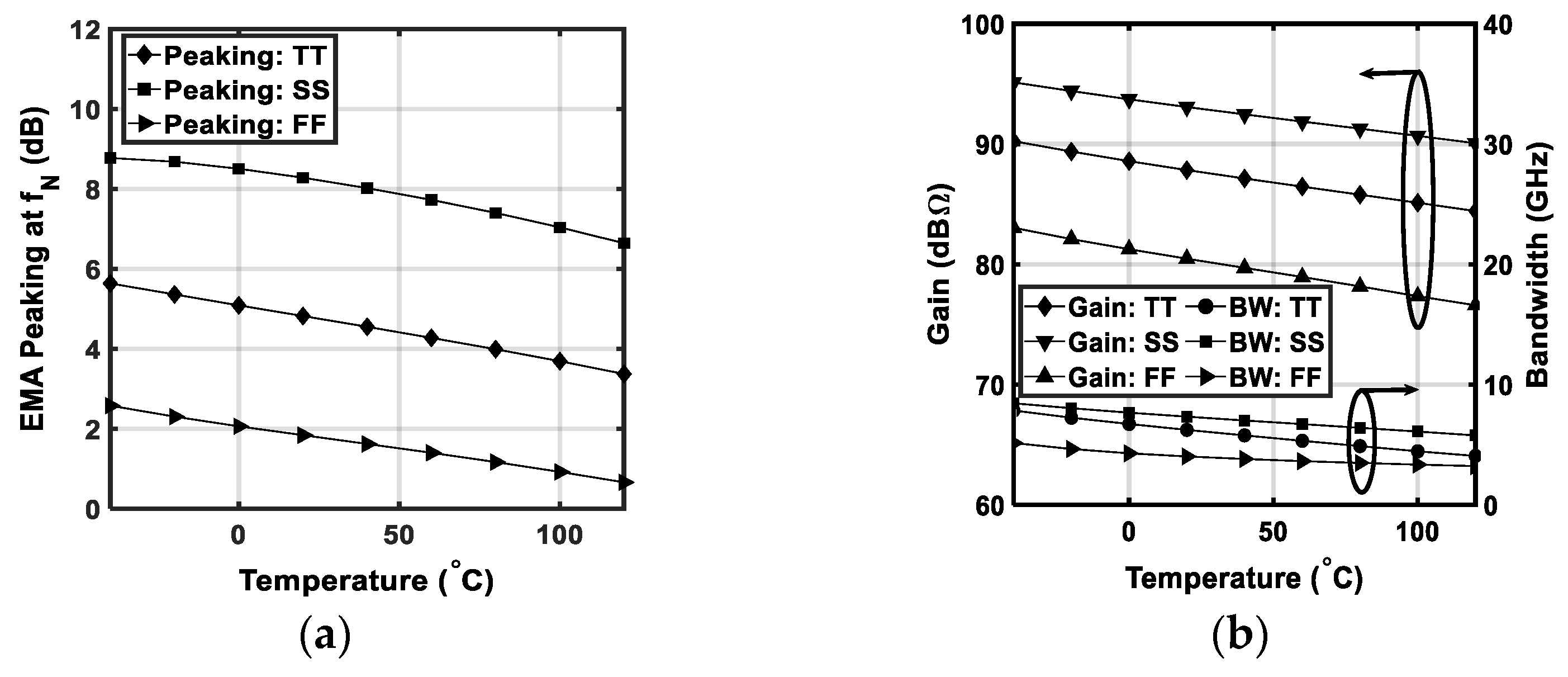
Figure 14 shows the simulated performance of the presented receiver under process and temperature variations.
Figure 14a shows that the EMA exhibits more peaking at a lower temperature. For a given temperature, the peaking can vary by up to 6.5 dB over different process corners. The FE gain and bandwidth in
Figure 14b can vary up to 13.5 dB and 3.4 GHz over different corners, respectively. The gain and bandwidth variations relative to their values at room temperature reach up to 24.3% and 22.5%, respectively, as the temperature varies from 20
to 80
. This performance variation is mainly caused by the constant current sources used in this design and can be counteracted by employing temperature-compensated or constant-
gm biasing techniques [
19]. Adaptation techniques can be also employed to continuously monitor the output eye diagram and set the circuit parameters accordingly to maintain the best quality for the equalized eye [
20]. In the implemented prototype, the TIA’s feedback resistor and current sources in the forward and feedback paths are made variable. This allows for post-fabrication control on peaking frequency, peaking magnitude, and the TIA’s high-frequency roll-off. Therefore, the amplitude responses of both the EMA and the TIA track each other to achieve the targeted bandwidth with minimal GDV.
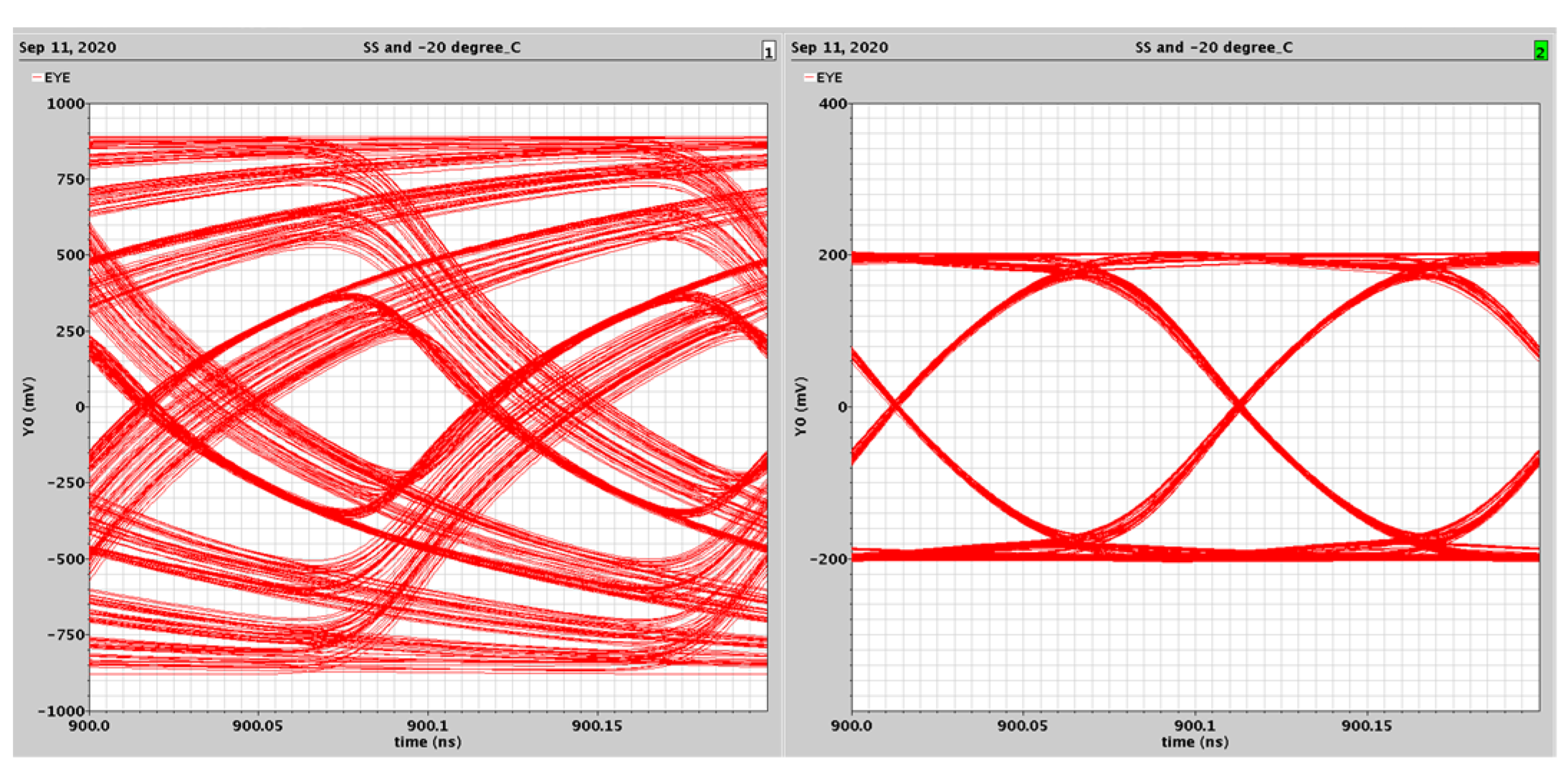
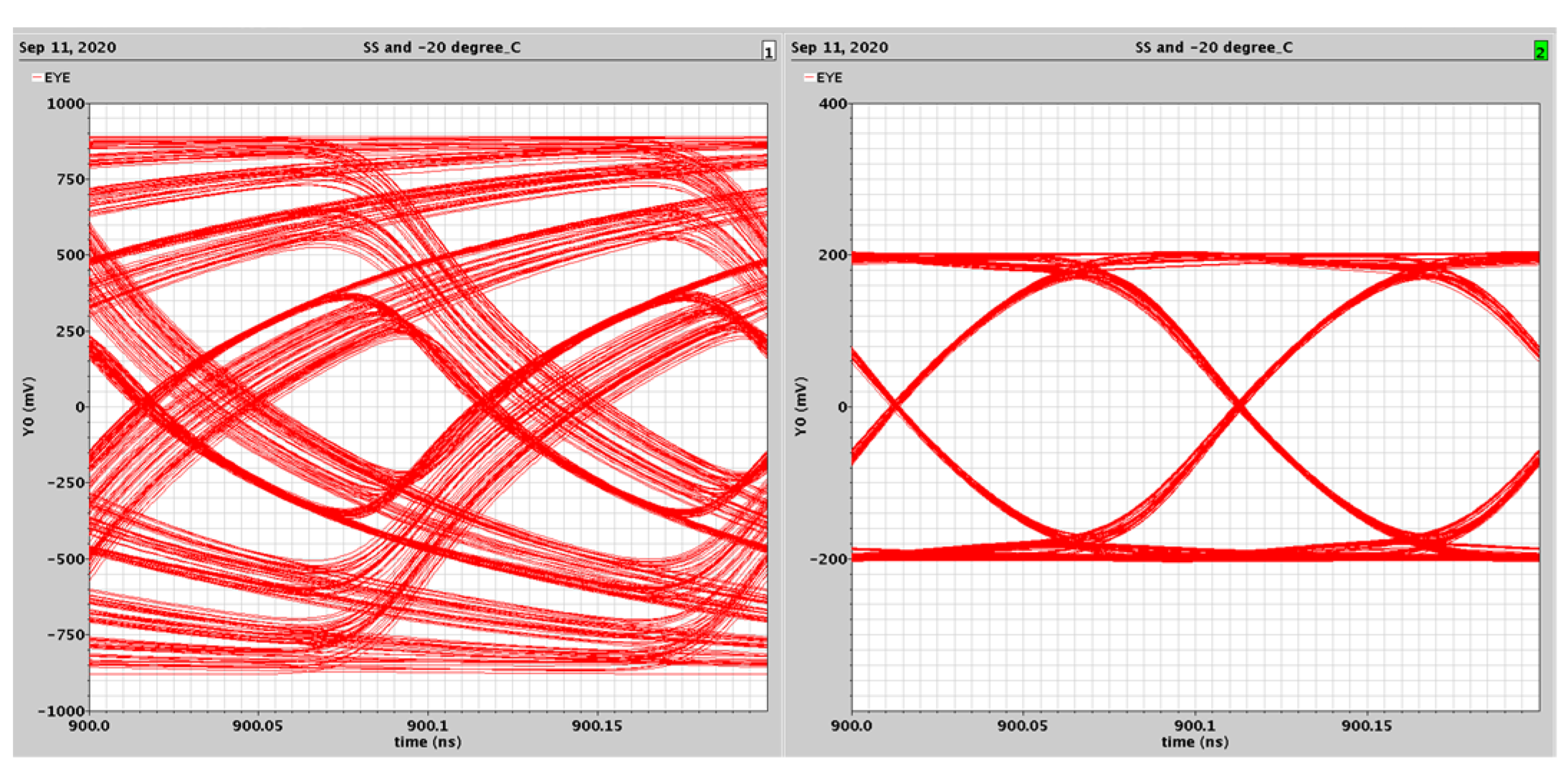
To prove that the proposed technique works despite the PT variations,
Figure 15 shows the simulated 10 Gb/s eye diagram at the SS process corner and
. The uncompensated eye (left) shows a significant distortion. By carefully adjusting the circuit parameters, a clean eye is obtained (right) with an internal opening similar to that obtained under nominal operations. To generate the eye on the right, the circuit parameters are changed as follows:
IB is reduced from 2.5 mA to 1.65 mA,
IF is increased from 0.325 mA to 0.4 mA, and
RZ is reduced from 0.575 kΩ to 0.445 kΩ. The tunability range of all circuit parameters are limited to less than 35% of their nominal values which is feasible for realization. Further, the capacitance introduced by the configurable current sources appears at tail nodes and therefore does not alter the signal path.
5.3. Stability
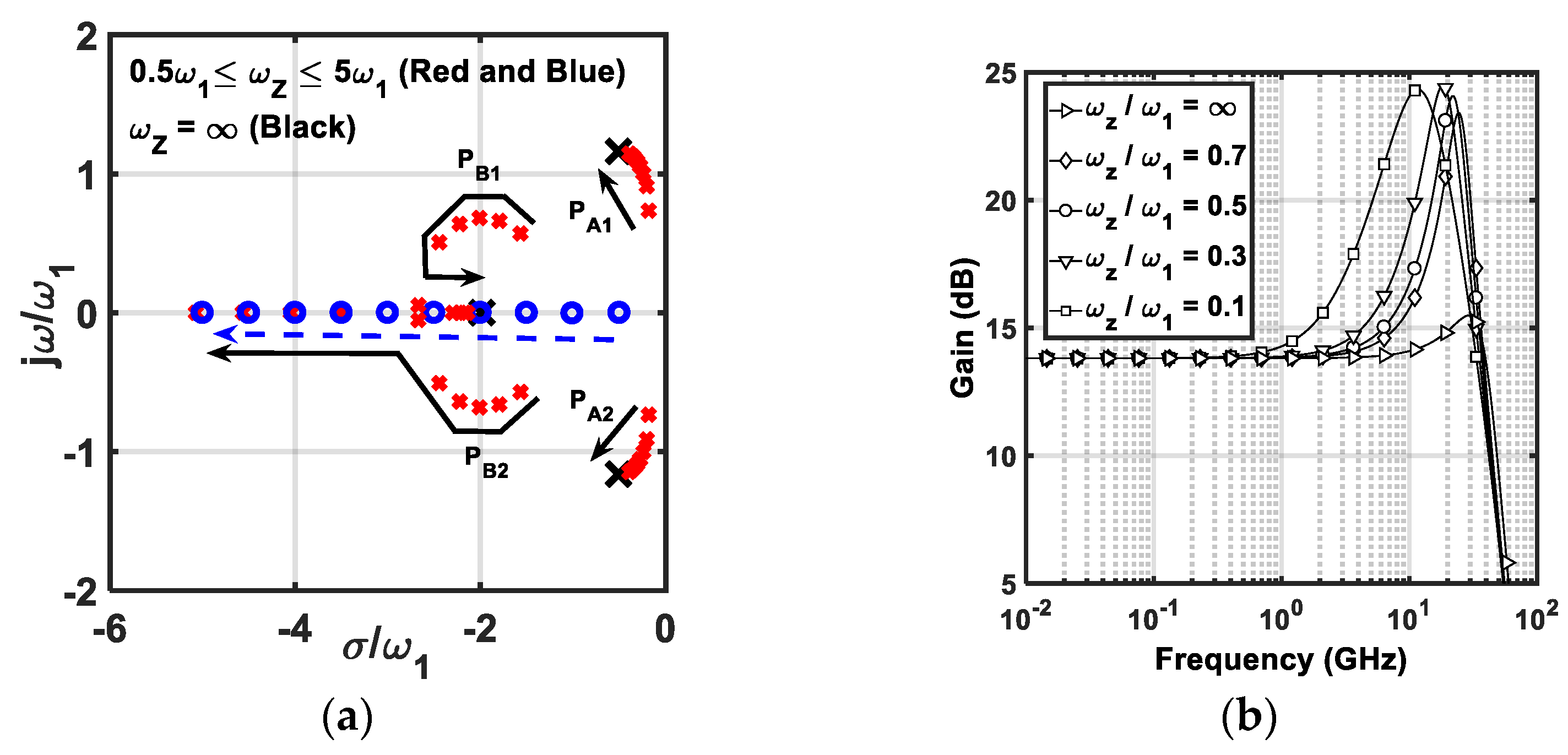
In the presence of a complex feedback and high amplitude peaking in the EMA, the stability of the presented FE becomes an important consideration. The pole-zero simulation in
Figure 6a shows that a pair of complex poles (
moves toward the y-axis as
is reduced.
is the frequency of the introduced zero that ideally cancels the bandwidth-limiting pole created by the low-bandwidth TIA. As a result, the TIA’s 3-dB bandwidth cannot be made arbitrarily small to avoid the EMA’s pole pair travelling to the right-hand plane (RHP). Further, for a given
, the poles
may enter the RHP at excessively large feedback gain
. However, the values of
that lead to RHP poles are far from those in the proposed design. For example, in the FE in
Figure 7, when
is set to
, the poles
do not travel to the RHP until after
and
for
of
and
, respectively, while
is typically limited to less than 0.3.
5.4. Discussion and Comparison to Prior Work
The performance of the proposed FE is compared to other
high-gain receivers in the literature as shown in
Table 2. Although thorough circuit simulations are sufficient to prove the concept behind our design, the absence of optical measurements complicates the comparison with prior art. The work in [
8] consists of an Inv-TIA followed by three stages of an Inv-based Cherry-Hooper voltage amplifier. In this architecture, active interleaving feedback and local positive feedback are applied to extend the bandwidth. The circuit is implemented in a single-ended structure and measured with electrical and optical inputs for various data rates. Only electrical measurements at
are listed in
Table 2. The work in [
8] is measured for two modes of operation denoted on
Table 2 by best sensitivity mode and lowest power mode (see Figure 18 in [
8]). The average of these two modes shows approximately 2
better sensitivity and 2.3
better energy efficiency compared to the work presented here. The reason for this better performance is mainly because of the single-ended structure in [
8] that reduces the power dissipation and thermal noise sources compared to the differential structure used in this work. Further, the single-ended implementation enabled measurements at low supply voltages, which are not available in this work due to the DC biasing requirements on differential amplifiers. The proposed design has a much higher output peak-to-peak amplitude at the sensitivity level than [
8], which is not optimized for high-gain operation and incurs a significant PP when the receiver is followed by a practical decision circuit.
The presented receiver shows better energy efficiency than [
21] which is implemented in a more advanced technology node and a comparable energy efficiency to [
12] which is implemented in the same technology. The combination of multistage shunt-feedback TIA and the noiseless DFE in [
12] has resulted in an excellent sensitivity at the cost of more complexity and power dissipation on the equalizer that consumes 74% of the total power. Therefore, a design that incorporates the high-gain FE in [
12] with our proposed equalization technique with no additional power dissipation could lead to significant improvement on the energy-efficiency of the receiver while maintaining a good sensitivity. The work presented here shows comparable voltage sensitivity to the limiting amplifier introduced in [
9], built by applying an active interleaving feedback to third-order gain cells. Finally, our work shows the largest output voltage amplitude for an input set to the sensitivity limit which makes it suitable to drive the subsequent clock and data recovery (CDR) circuit with negligible power penalty.
5.5. Operation at Higher Data Rate
The circuit in
Figure 11a is also examined for 20 Gb/s operation with the same simulation setups described in
Section 5.1 First, the TIA’s bandwidth is set to 6 GHz (30% of the targeted data rate) by employing a feedback resistor of 800 Ω. Then, the limited-bandwidth TIA is followed by a wideband MA and the EMA, one at a time. Both amplifiers have the same value of
and
and therefore they consume the same DC power. The MA has a flat amplitude response with a bandwidth of 18.7 GHz. However, the overall bandwidth of the combined TIA/MA is dominated by the TIA’s bandwidth. The EMA, on the other hand, introduces 3.5 dB of amplitude peaking at 10 GHz that extends the overall bandwidth of the combined TIA/EMA to 10.9 GHz.
Figure 16a,b shows the simulation results for the output eye diagram for both scenarios. The internal eye opening improves by 1.6
when the EMA is employed compared to the case in which the wideband MA is used, demonstrating the capability of the presented technique in restoring the targeted bandwidth. The eye diagram in
Figure 16c is obtained from the FE that includes TIA/MA after extending the TIA’s bandwidth to 13.5 GHz by reducing its feedback resistor to 400 Ω, achieving an overall bandwidth of 11.8 GHz. Comparing
Figure 16b,c) emphasizes that the presented design technique improves the effective gain compared to its conventional wide-bandwidth counterpart. The performance of the proposed FE at 20 Gb/s in comparison to its conventional counterpart is summarized in
Table 1.
5.6. Operation with Large Input Signal
The presented analysis assumes that the gain cells are in linear operation. In reality, the circuit performance is strongly affected by the signal amplitude. As the signal propagates through cascaded stages, the latter gain cells start to saturate as a result of the increased voltage swing. Eventually, these cells act as unity-gain buffers and consequently the loop-gain falls below unity due to the presence of the active feedback. This in turn reduces the bandwidth. The impact of large input levels on the bandwidth of the active feedback-based structure is observed in [
9] and an inverse scaling technique [
22] is proposed as a potential solution for the problem. However, inverse scaling complicates the system analysis especially in the presence of interleaving feedback.
Alternatively, a straightforward automatic gain control similar to that presented in [
6] can be employed. The technique has three steps: (1) aggressively reducing the TIA’s gain at the cost of introducing a severe peaking in its amplitude response; (2) re-configure one of the MA stages to act as a low-pass filter to suppress the TIA’s peaking and set the receiver bandwidth; (3) increasing the transconductance of the active feedback cell in the remaining MA stages to reduce their gain. In other words, at very high inputs, the TIA and the EMA interchange their roles. That is, the TIA introduces a high-frequency peaking that is then suppressed by the subsequent low-bandwidth amplifier.
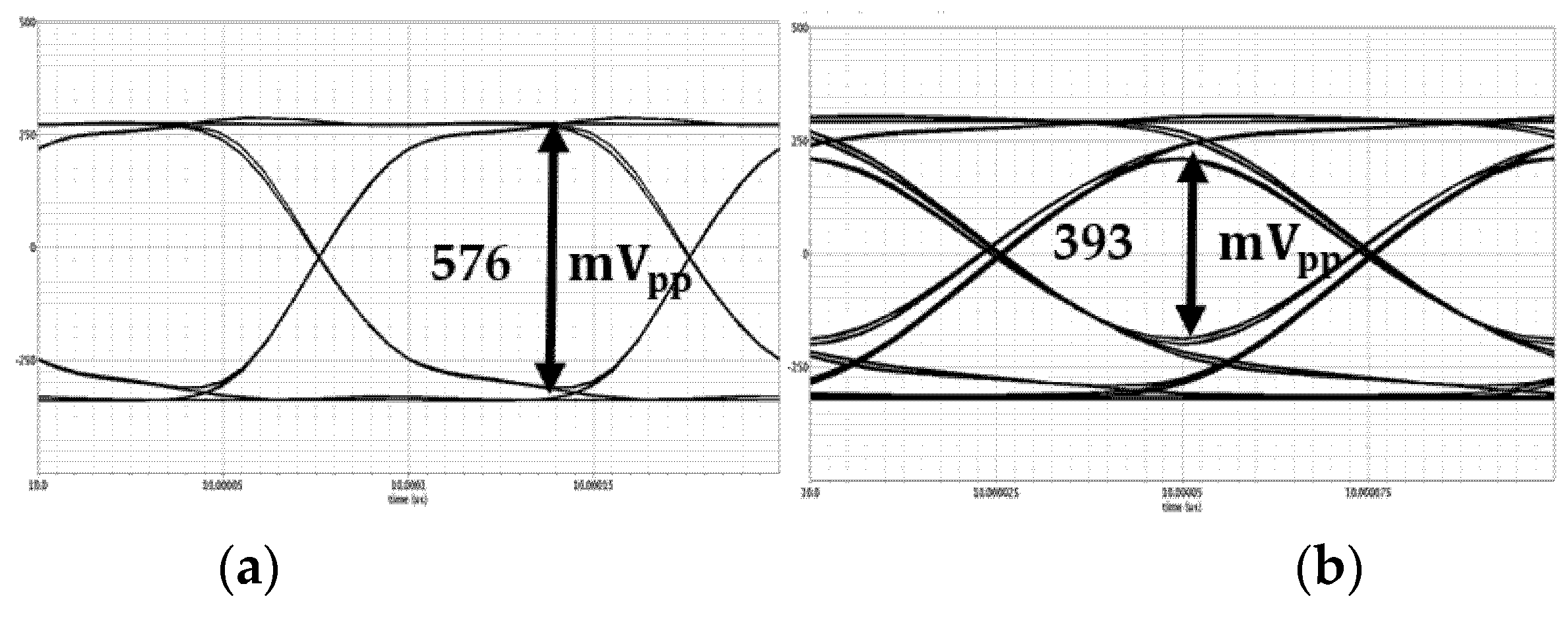
Figure 17 shows the simulation results for output eye diagrams when the input is set to
at 10 Gb/s and 20 Gb/s. To generate these eyes, the TIA’s feedback resistor is reduced to
and the LPFs are removed from the EMA circuit. Despite the 7 dB of peaking in the TIA’s amplitude response, the overall FE shows a flat amplitude response and a bandwidth of 12 GHz. The eye is fully open at 10 Gb/s. At 20 Gb/s, the internal eye opening is better than 60% of the maximum value. At both data rates, the eye opening is larger than it was at the sensitivity level. The widened eyes demonstrate the capability of the circuit to handle large input signals.


 ,
, 


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}